1. Introduction
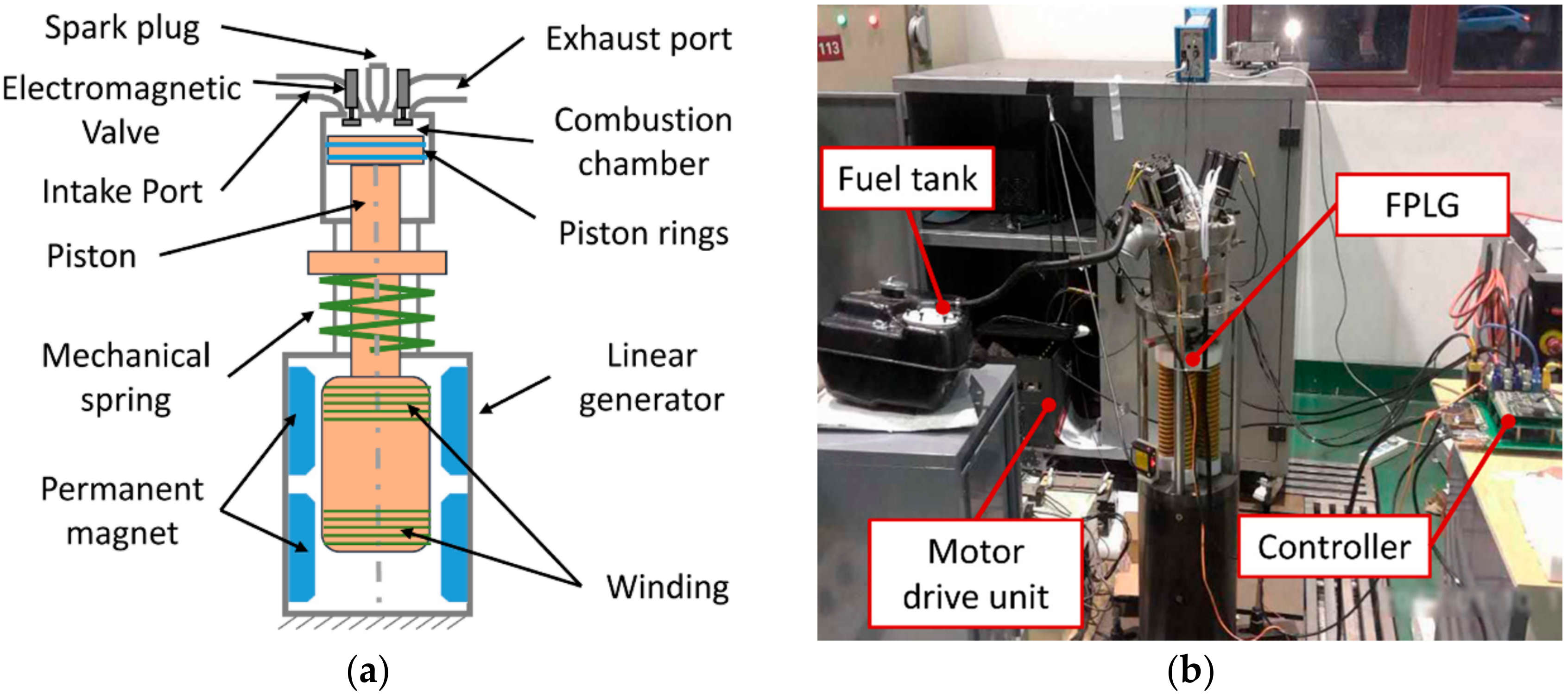
A free-piston linear generator is a novel energy converter which normally consists of an internal combustion engine (ICE), a linear electric machine (LEM) and a rebounding device [
1,
2]. The hybrid electric vehicle equipped with this energy conversion device can increase the runtime or reduce the demand of charging. Compared with the conventional internal combustion engine, due to the elimination of the crankshaft and flywheel of ICE, the piston of the ICE and the mover of the linear generator are directly connected [
3,
4,
5]. Therefore, the piston is free to oscillate between the top dead center (TDC) and the bottom dead center (BDC) without the limitation of the crankshaft mechanism. This brings the ability to accommodate multi-fuel by easily controlling the compression ratio without modifying the mechanical structure. The energy conversion efficiency can be increased with optimizing the compression ratio [
6,
7,
8,
9]. Furthermore, the key performances of FPLG, the output power and system efficiency could be improved by controlling the motion state of the piston [
10,
11].
At present, there are mainly three kinds of conventional control strategies to operate the piston motion state. The first one is trajectory tracking control, which means the piston motion is controlled to follow along with a specified reference trajectory [
12,
13,
14,
15,
16,
17]. The second one is specifying a reference current profile to generate an appropriate electromagnetic force for stable operation [
5,
18,
19,
20]. Another one is to achieve the balance of energy flow by regulating the load factor and combustion parameters [
7,
8,
9,
21,
22,
23,
24].
Němeček, and Vysoký investigated a two-stroke opposed-piston FPLG [
13]. In order to avoid collisions between the piston and the cylinder head, a motion control was presented through giving a desired trajectory that was very similar to the sinusoidal signal. Kosaka and Moriya also presented a trajectory tracking control to operate the piston motion [
12,
16]. However, in their studies, an inappropriate reference trajectory could have a negative effect on the output power and the system efficiency [
13]. Furthermore, an offline reference trajectory will produce cumulative error and made a misfire after a long runtime [
16]. At present, it is difficult to generate a high conversion efficiency with an adaptive trajectory according to the amount of combustion energy and the burning state, especially when a high motion frequency and a high motor-generator dynamic response are required [
17].
In [
4,
11,
18,
19], Xu et al. presented a single cylinder four-stroke FPLG. Their research proposed a control strategy which used a constant electromagnetic force profile generated by the reference current during one stroke. The reference current was regarded as the control variable to limit the dead center deviations within a suitable range. In [
25], a hierarchical hybrid controller was designed by Xia and Grimble. Similarly, the one stroke constant electromagnetic force was used to control the piston motion, the value was adjusted based on the energy balance equation of each stroke. Since the piston motion of acceleration and deceleration, a simple constant reference force profiles could not totally conform to the features of piston motion.
The researchers in [
6,
20,
26] presented a full-cycle simulation model, which consisted of a single piston engine, linear electric machine and a gas spring bounce chamber. The stable operation was achieved by adjusting the combustion and rebounding parameters. During operation process, the electromagnetic force was proportional to the velocity of the piston, and the direction was opposite with the velocity when FPLG was in generator mode. Similarity, Jia presented a novel cascade control method that was used to regulate the fuel mass to overcome the disturbances of the LEM and ICE [
8,
9]. Gong described a nonlinear linear quadratic regulator (LQR) controller to adjust the input energy for reaching the fast response in an opposed-piston FPLG [
22,
23]. In these strategies, though the electromagnetic force was adjusted by the load coefficient, it was defined as a constant under a specified working condition. A large constant load coefficient will slow down the velocity of piston in the acceleration phase of each cycle [
27]. For one thing, these control strategies didn’t take into account the effects between the power demand and the load requirement. For another, they rarely consider the relationship between the output power and electromagnetic force profile, Therefore, only by regulating the injected fuel mass and load factor could not be a suitable method to improve output power.
Due to that increasing fuel mass is an effective way to increase the output power [
7,
23,
28,
29], the relationship between the output power and the electromagnetic force profile is seldom noticed. In the previous research most researchers only pay attention to the stable operator of the piston. However, the output power not only depends on these factors, such as the in-cylinder initial pressure, the dimension of FPLG [
4,
10,
18], but also the piston movement characteristic. Therefore, a feasible and succinct control strategy is of necessity to achieve an appropriate operation process for improving the output power. In this paper, the relationship between the average piston motion velocity and average output power is derived and a ladder-like control strategy considering the piston acceleration and deceleration phase is developed.
In the following sections, firstly, the structure of middle spring-rebounded FPLG is described and the mathematical models of FPLG components are built. The working principle of this device is introduced. Secondly, on the basis of the characteristics of the piston motion, energy equations and influence factors of the output power, a succinct control strategy is proposed to improve the output power. The main structures of total control system are presented. Finally, the power converter unit is implemented to the simulation model to obtain reliable results. The simulation results are also compared with different control strategies.
3. Dynamic and Thermodynamic Modeling
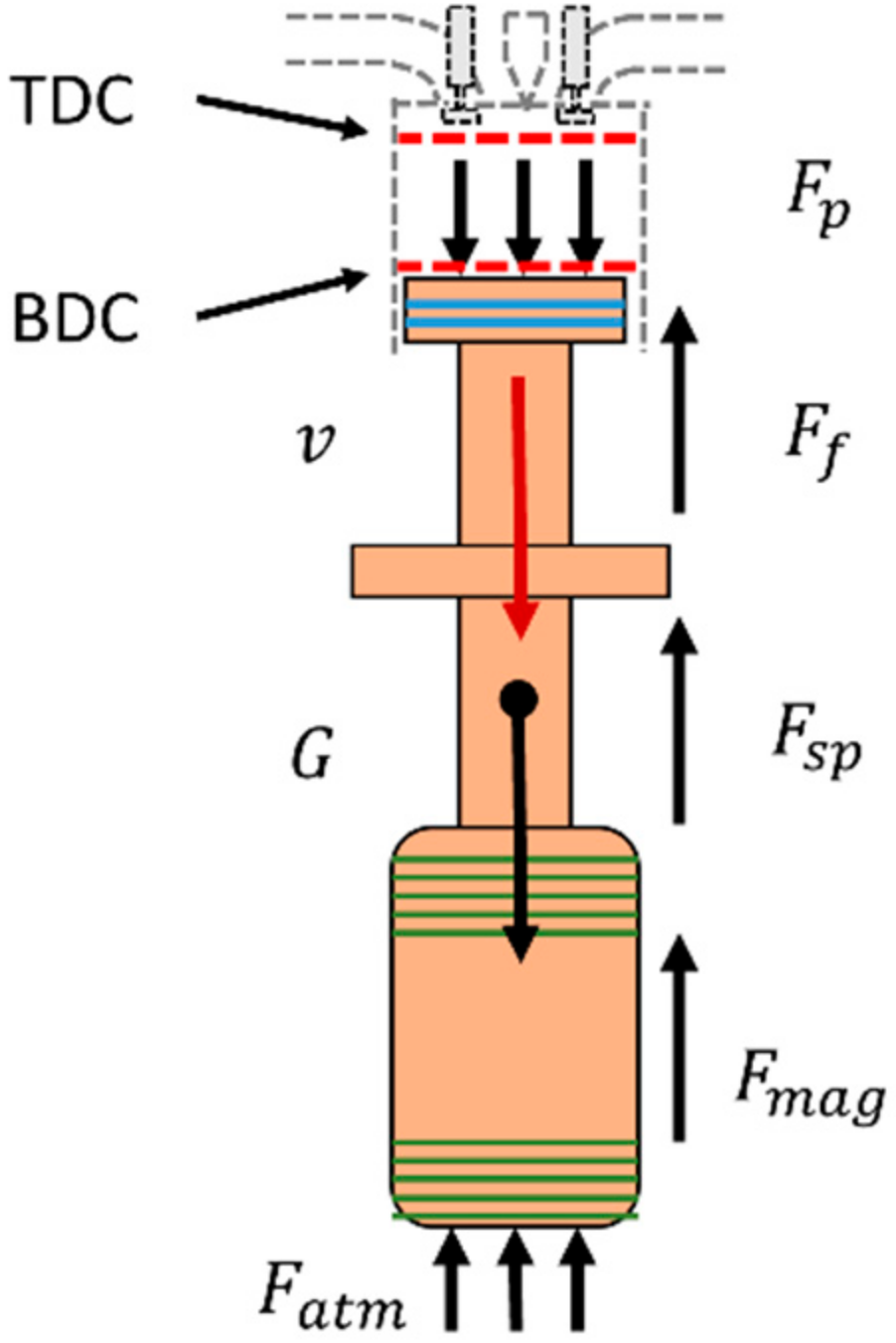
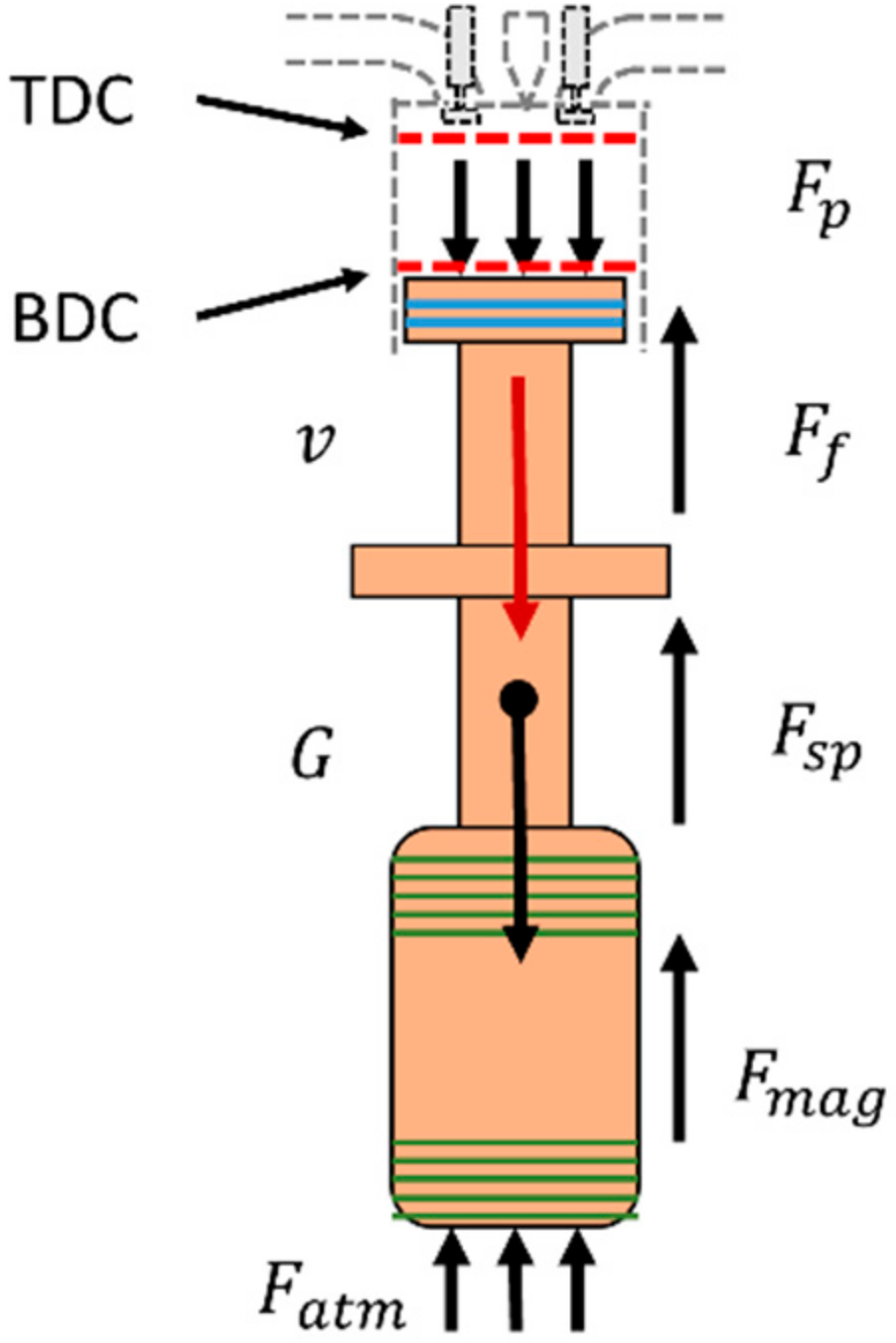
The piston motion trajectory is decided by the resultant force acting on the piston [
30,
31,
32,
33]. The force analysis is shown in
Figure 3. The dynamic equation is expressed as:
where,
Fp is the pressure force of the combustion chamber,
Fatm is caused by the atmospheric pressure,
G is the gravity acting on the piston assembly,
Fsp is the force generated by mechanical spring,
Ff is the frictional force between the piston components and the linear guide, and
Fmag is the electromagnetic force,
M is the mass of the piston assembly, and the displacement between the piston and cylinder head is defined as
for the purpose of describing the piston motion. The positive direction is defined to be from TDC to BDC, and the initial position of piston is near the TDC.
3.1. Thermodynamic Modeling of the ICE
In ICE, there are five main stages, intake, compression, combustion, expansion and exhaust. After the scavenging, assuming that the in-cylinder pressure also equals atmospheric pressure. Simultaneously, in combustion chamber, the thermodynamic dynamic is described by a single-zone model, and the assumptions are given below.
The working medium of the combustion chamber is regard as ideal gas, the pressure change and temperature change follow the ideal gas state equation;
The combustion process is working in a quantitative working medium, the leakage and gas exchange losses are ignored and the power required by scavenging process is ignored.
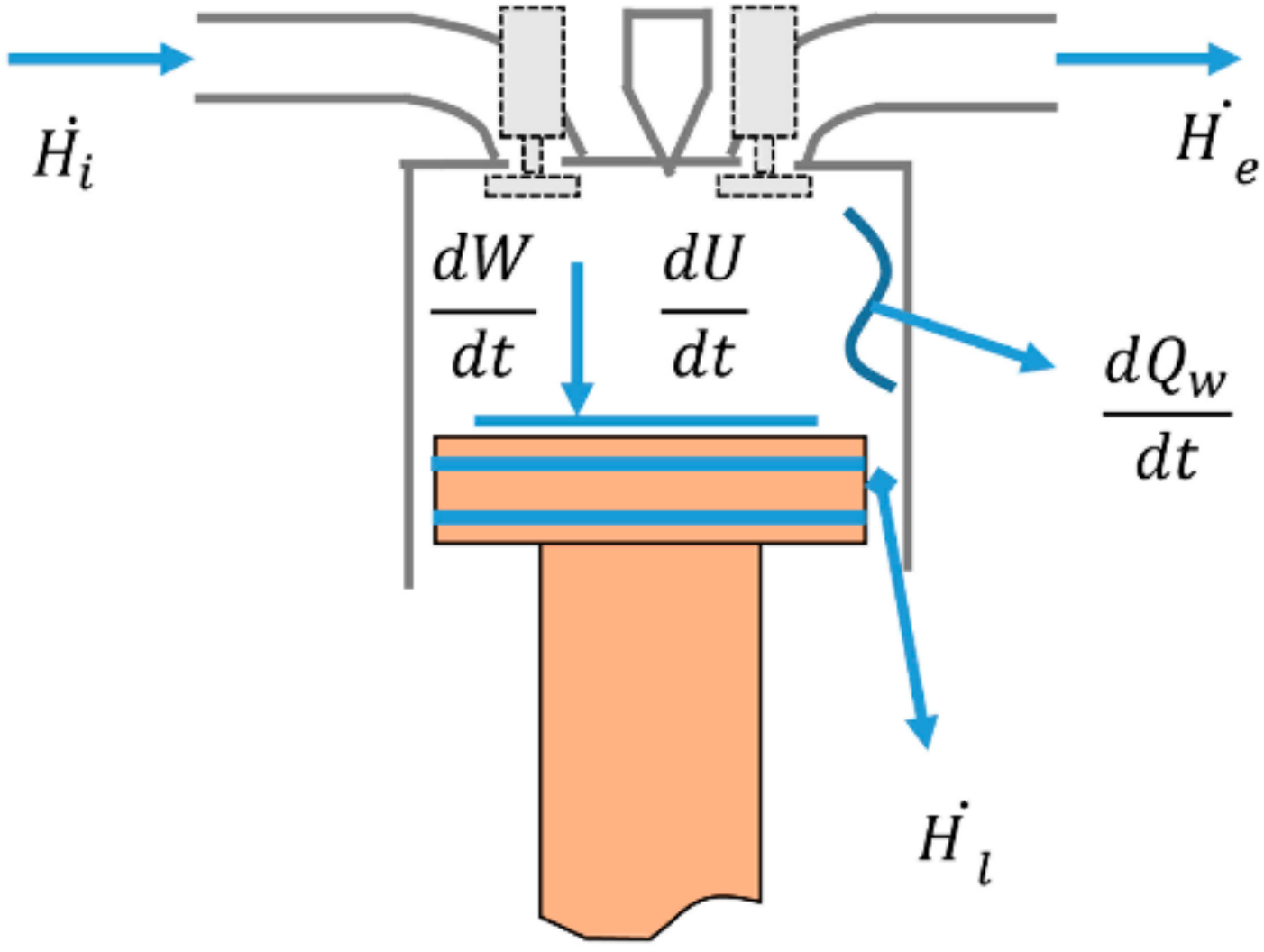
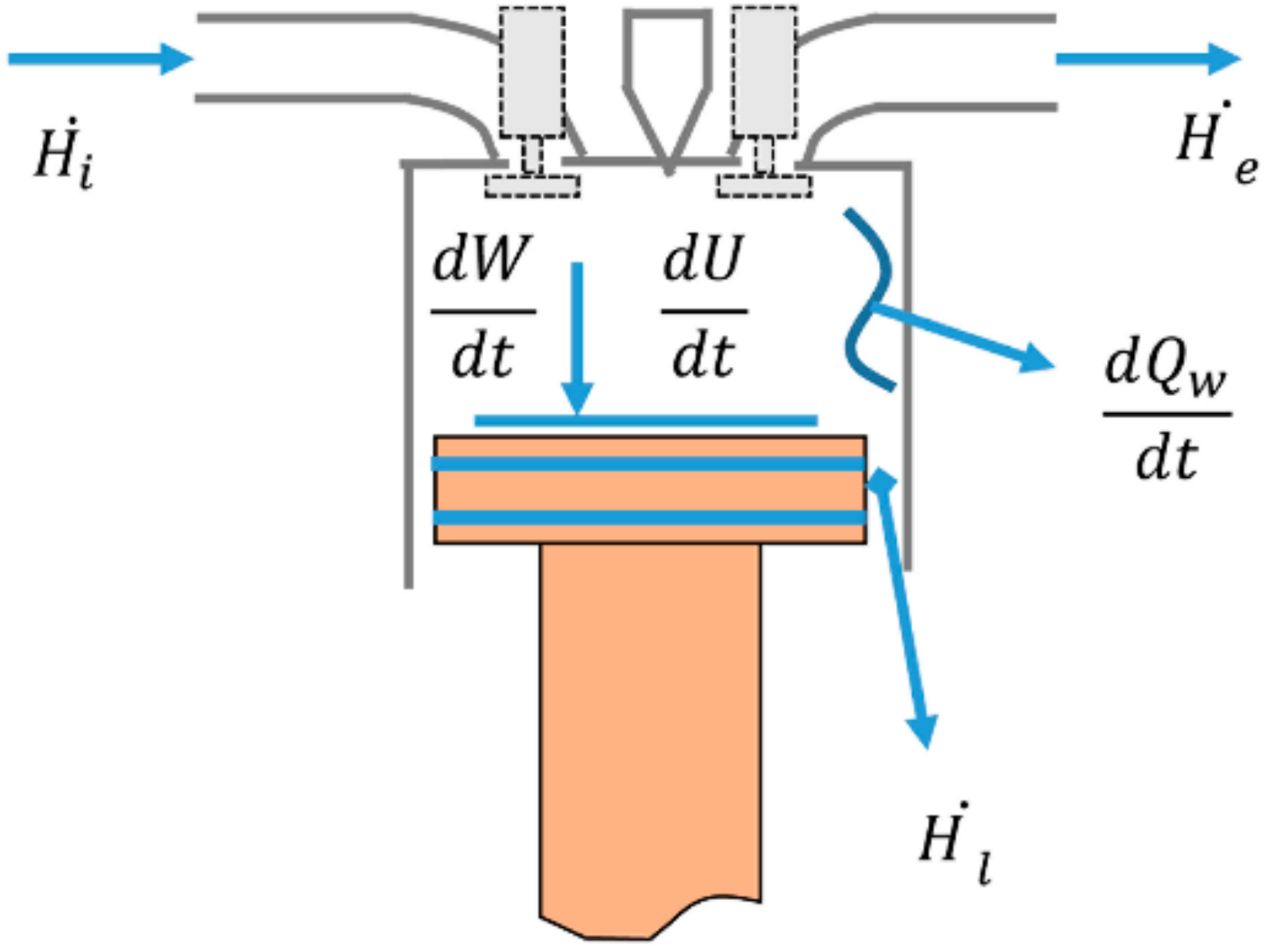
Figure 4 shows the in-cylinder energy flow. In ICE, the chemical energy is converted into heat energy when fuel is burnt. The in-cylinder pressure and temperature increase with the release of heat in the early stage of expansion process. On the basis of the first law of thermodynamics [
6,
31,
34], the thermodynamic process in ICE can be described as:
where,
,
and
are regarded as zero according to the assumptions above.
The change rates of the work done by in-cylinder pressure and the internal energy of the working medium can be expressed as (3) and (4):
By ignoring the gas leakage through the piston ring and the gas exchange loss due to the intake and exhaust process. Equation (2) can be simplified as:
According to the ideal gas state equation, the in-cylinder pressure is satisfied with (6):
The derivative of (6) with respect to time is written as:
Substituting the (8) into (5), the combustion released energy is derived as:
For convenient expression, polytropic exponent
is defined as:
In combustion process, the values of polytropic exponent of compression stroke and expansion stroke are different. Here, in order to build model easily, the comprehensive process is simplified, and the specific heat ratio
γ is defined as a constant [
20].
The in-cylinder pressure can be written as [
26]:
In this equation, using the Weiber function [
34], the released combustion heat of the combustion process is represented as:
where, the burned mass fraction can be written as:
where,
n is combustion quality index, which is a non-dimensional parameters. Its value depends on the compression ratio, the initial combustion temperature and the state of the mixture formation. Normally, for a small gasoline engine, parameter
n is in the range from 0 to 3. In our research, the value of
n is specified as 2 [
4].
There are many generic function models used to represent the heat transfer between the in-cylinder working medium and wall. Here, the Hohenberg model is used to describe this process [
29]:
Ultimately, the pressure acting on piston is described as following:
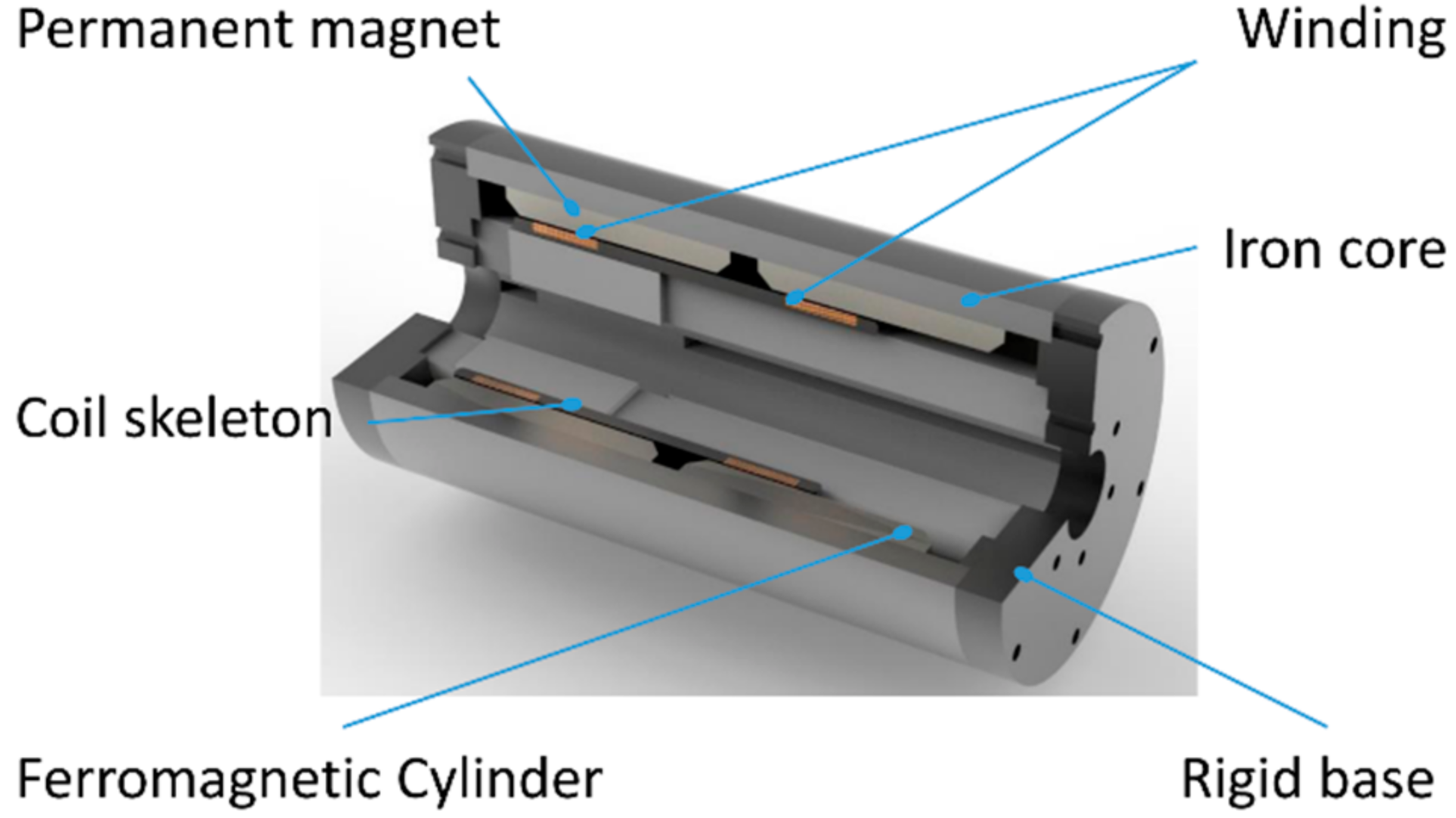
3.2. Mathematical Modeling of Linear Generator
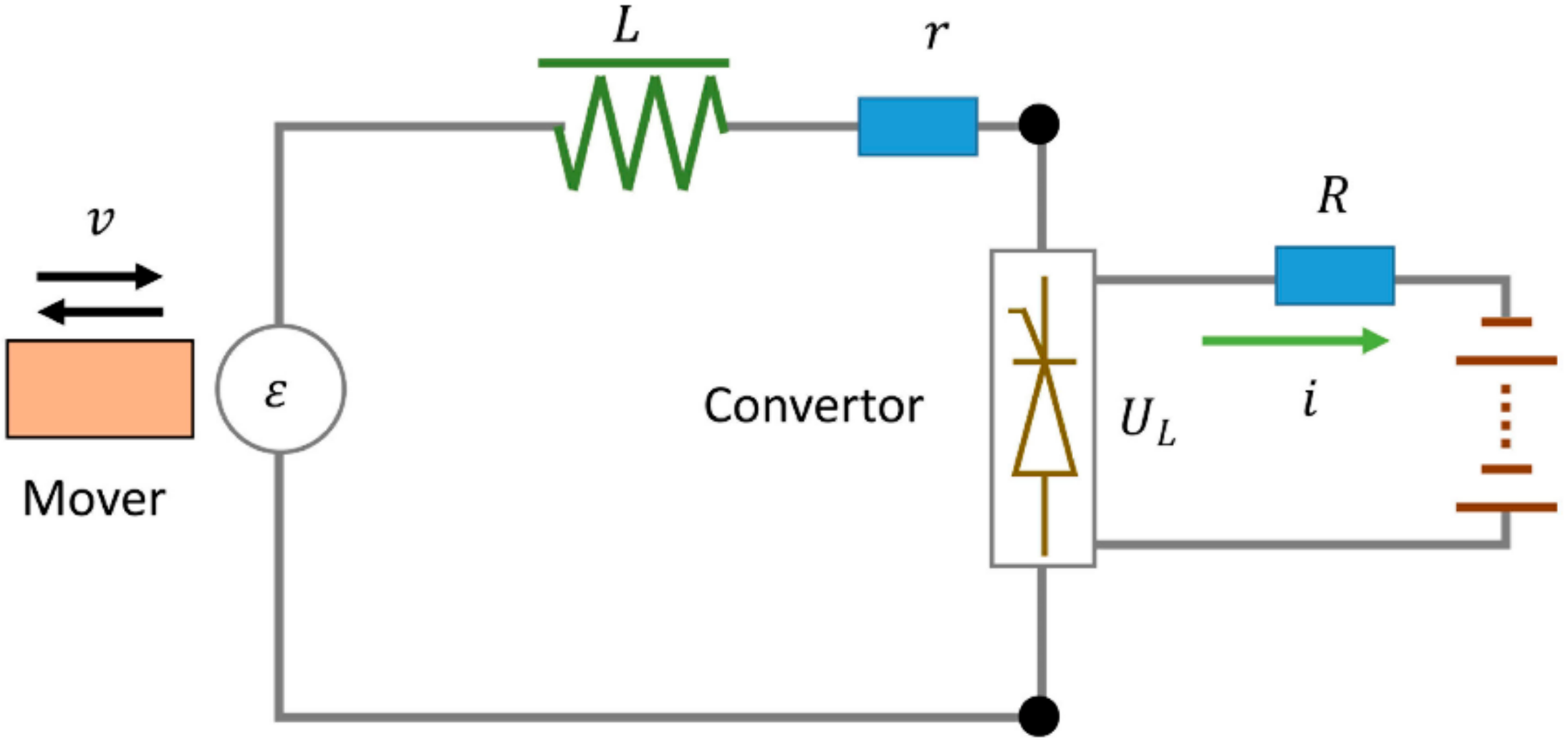
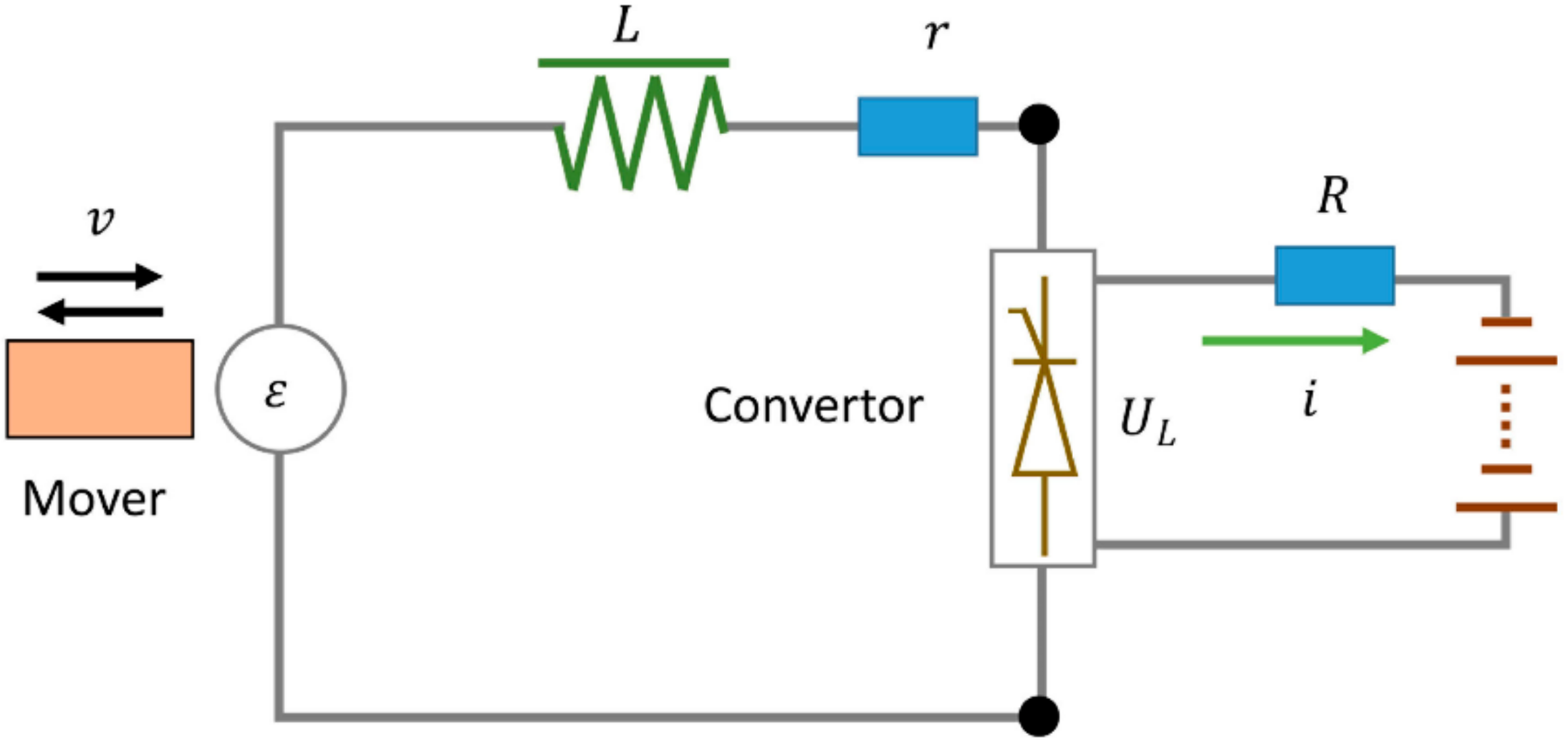
Figure 5 describes the equivalent circuit of motor/generator system, which consists of LEM, convertor and power supply unit. The LEM can be operated as a motor or a generator. The convertor is used to switch the work mode of LEM and control the current. The power supply can work in battery charging mode or discharging mode. The electromagnetic force of LEM is related to the armature current. When the system is in the starting process, LEM works as a motor and the force is described by (16):
When the FPLG is working in generating mode, the back EMF can be written as:
In accordance with
Figure 5, the voltage equation for this system is described as:
The electromagnetic force caused by the piston motion also can be presented as (16). The transfer function between
ε(
t) and
i(
t) can be written as:
3.3. Modelling of the Rebounding Device
Compared with the in-cylinder pressure and electromagnetic force, the friction force is small, the value of which can be regard as a linear relationship with the piston velocity:
where,
f is the frictional coefficient.
In our research, the spring is a constant-stiffness spring, the resilience can be expressed as:
where,
xsp0 is the initial length of the mechanical spring.
According to the design requirements and related work, the main parameters and structure dimensions of the FPLG are shown in
Table 1 [
1,
20,
23,
25].
4. Force Control of the FPLG
In our previous studies [
4,
18,
19], the force control strategy was used to control FPLG with a four-stroke combustion model. Here, the control strategy of two-stroke combustion model is shown in
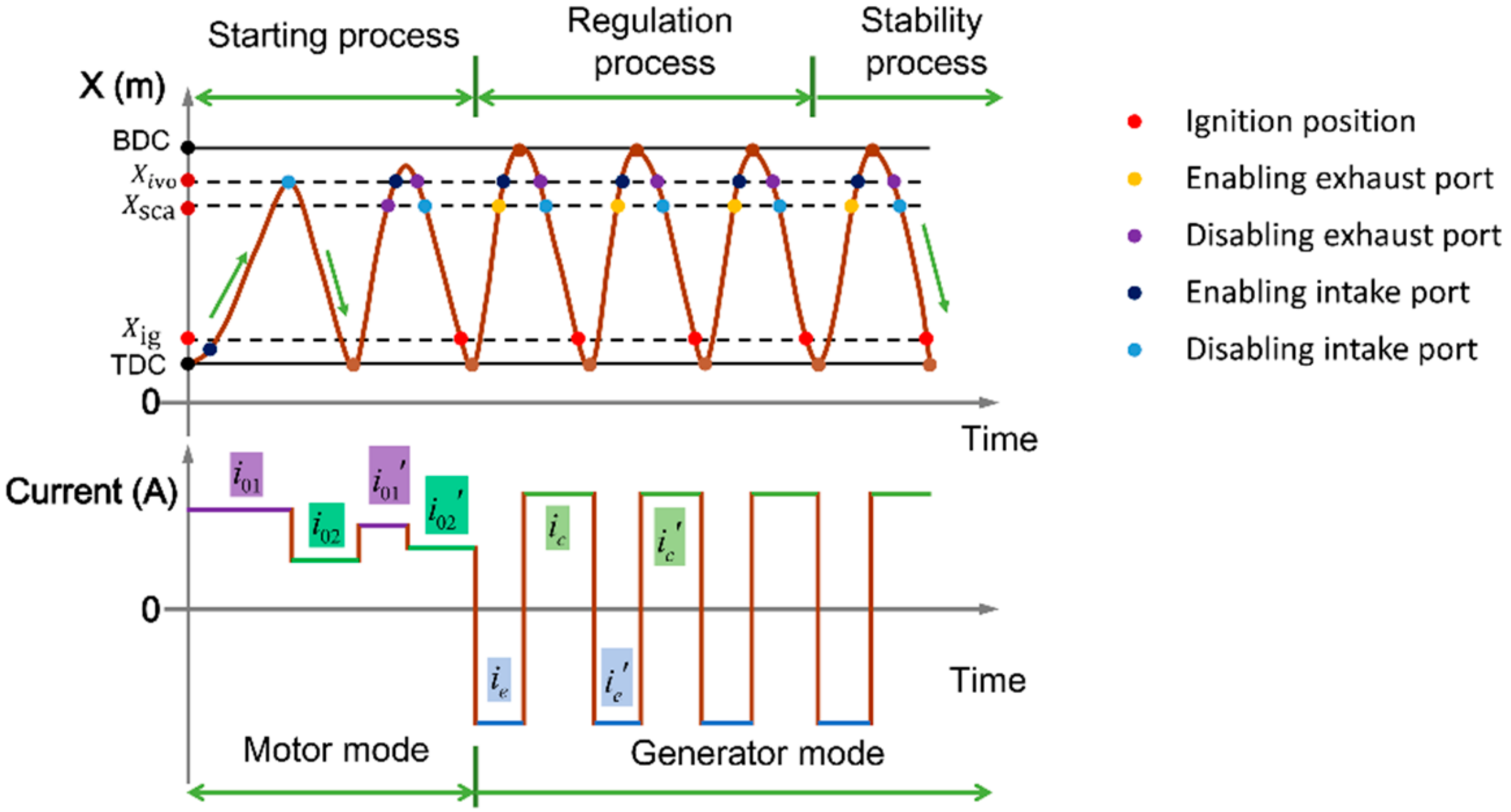
Figure 6.
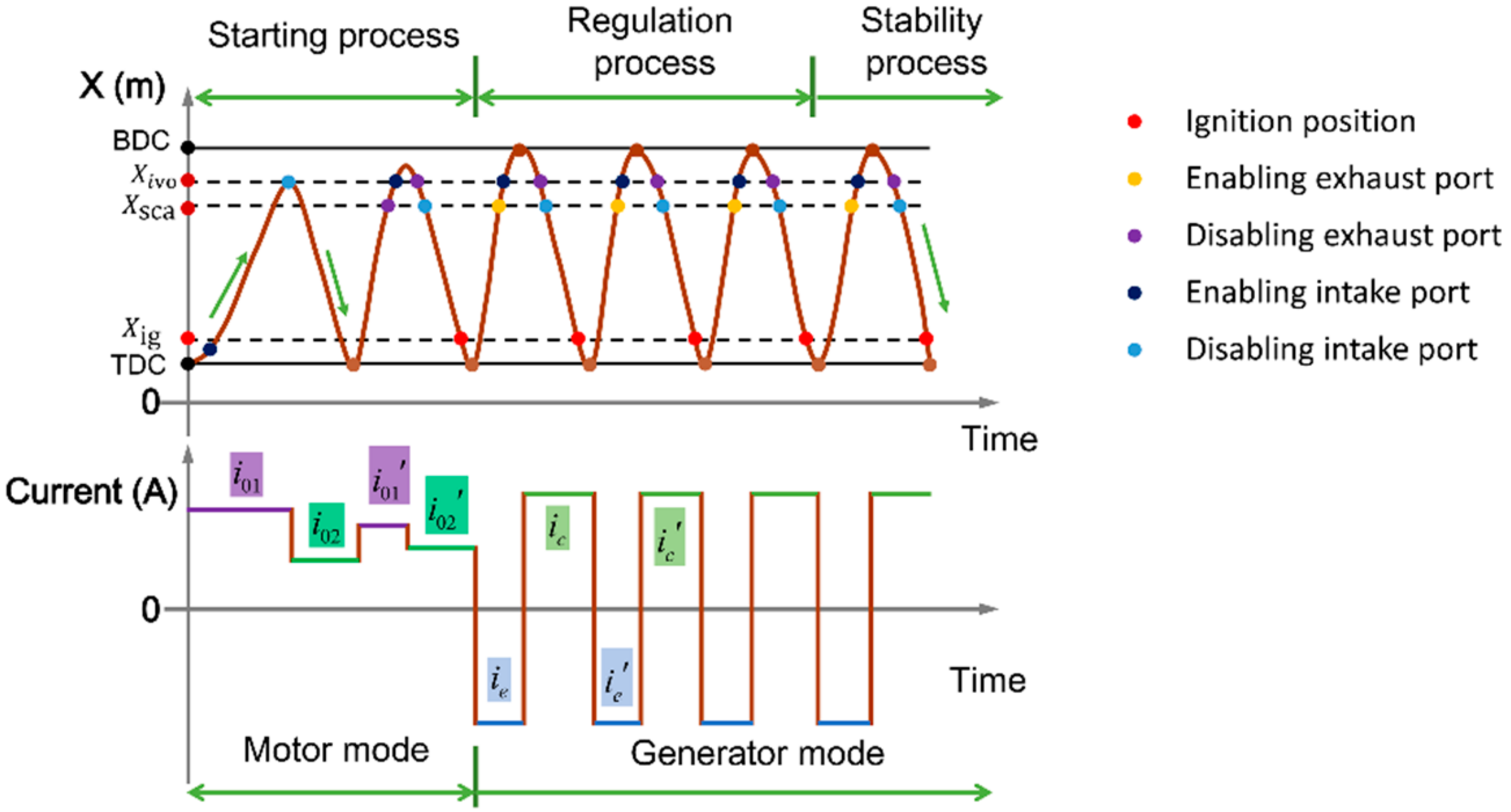
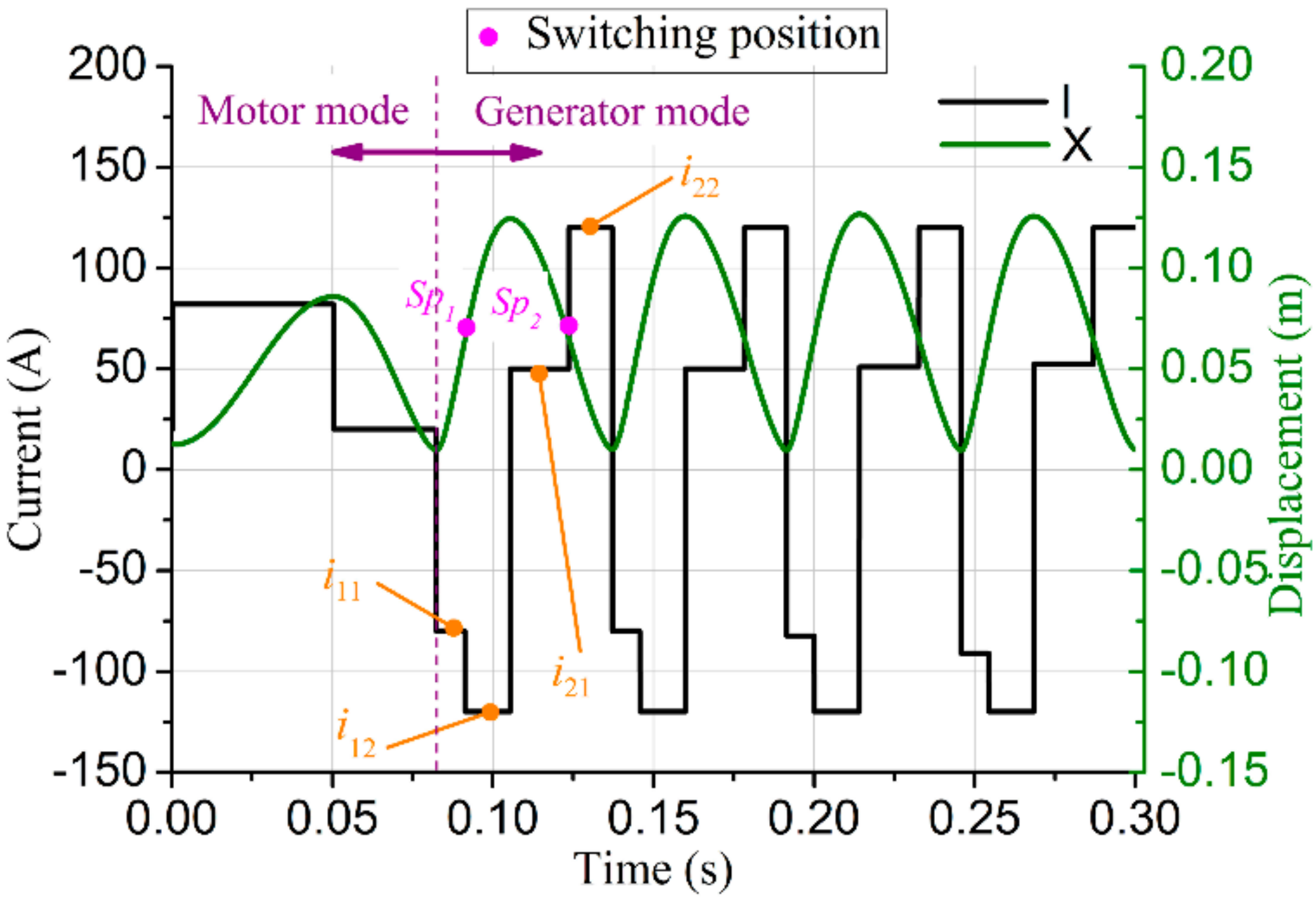
The piston motion is from static state to stable reciprocating motion by regulating the target currents. Here, the target current in each stroke is a constant value as shown in this schematic diagram. As shown in
Figure 6, there are starting process and regulation process before steady operation. In the starting process, the initial position of the piston is close to TDC and the initial states of electromagnetic valves are closed. When FPLG starts working, The LEM works as a driving motor to generate electromagnetic force to push the piston. The driving currents
i01,
i02 are calculated by Equations (22) and (23). Their directions are same with the velocity of piston:
where,
Ecom is the in-cylinder internal energy generated by the compression of the air pressure when the piston is from BDC to TDC,
xivo is the switch position of the intake valve,
x0 is the initial position of piston,
P0 is the intake pressure, and
V0 is the initial volume at the end of the scavenging process.
After that, the compression stroke starts. The fuel is injected into the combustion chamber to generate premixed fuel-air mixture. Once the piston runs close to the specified compression ratio, the spark plug will be enabled. The high pressure from the combustion of in-cylinder air-fuel mixture pushes the piston to BDC. Meanwhile, the LEM and the mechanical spring generate a braking force to decelerate the piston until its speed becomes 0. The cycles of starting process will be repeated until the appropriate maximum piston velocity and combustion conditions are achieved.
The valve timing is also depicted in
Figure 6. In the first cycle, the exhaust valves are closed and the intake valves are enabled, therefore the combustion chamber is filled with fresh air during the period that the piston move from initial position to BDC. In the rest of the starting process, the exhaust and intake valves will be enabled in turn when the piston reach
xsca and
xivo, respectively. Then, the exhaust and intake valves will be disabled successively when the piston reach
xiv and
xsca, respectively. In regulation process and stability process, the electromagnetic valves are operated in the same order. Here, the scavenging position is defined at near 0.085 m.
The main purpose of the regulation process is to realize steady operation. The regulating relationships between target currents
ie,
ic and the energies are shown in (24):
where,
E1 and
E2 are the sum of energy losses in expansion and compression stroke, respectively. They are calculated by accumulating iteration. BDC* and TDC* are the target dead center position, BDC and BDC are the actual dead center position. The TDC error is the difference between the target TDC position (TDC*) and the actual TDC position (TDC), and the BDC error is the difference between the target BDC position (BDC*) and the actual BDC position (BDC).
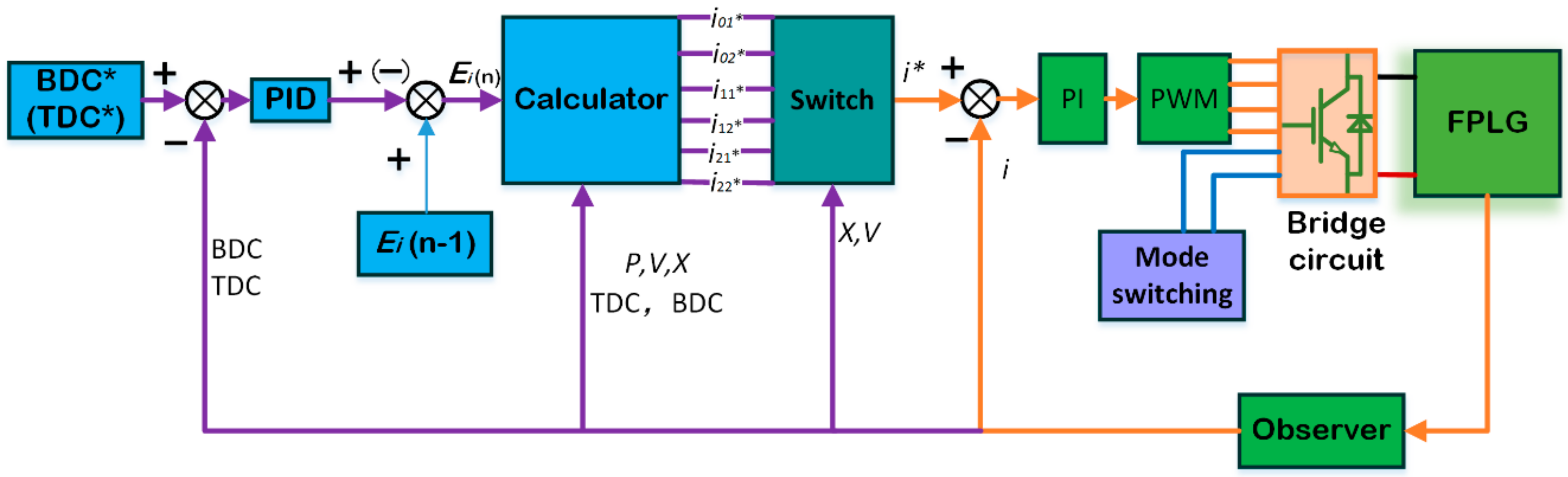
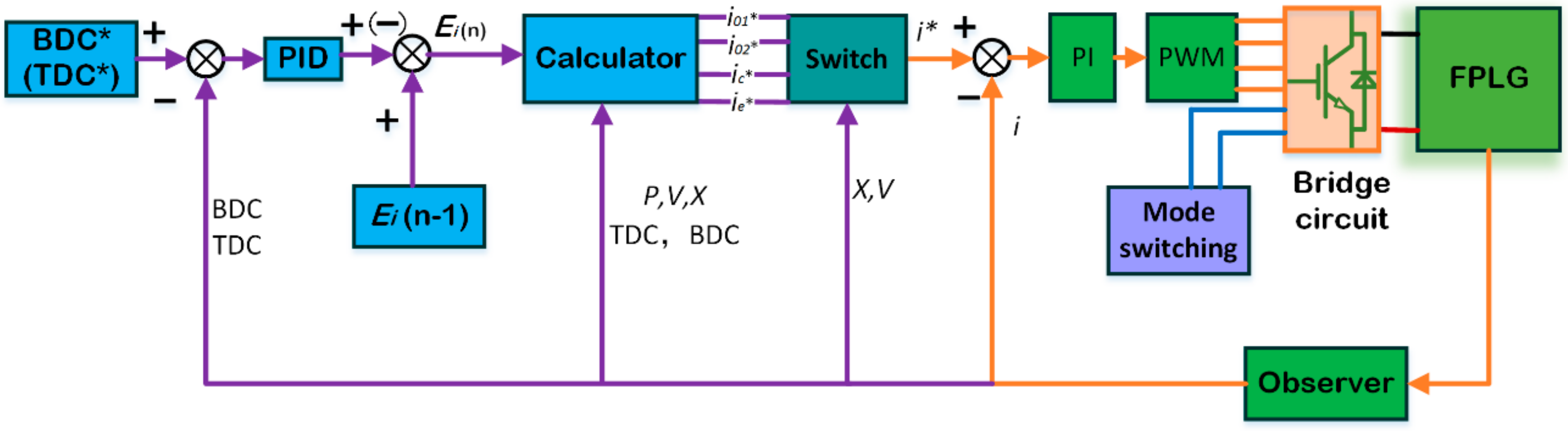
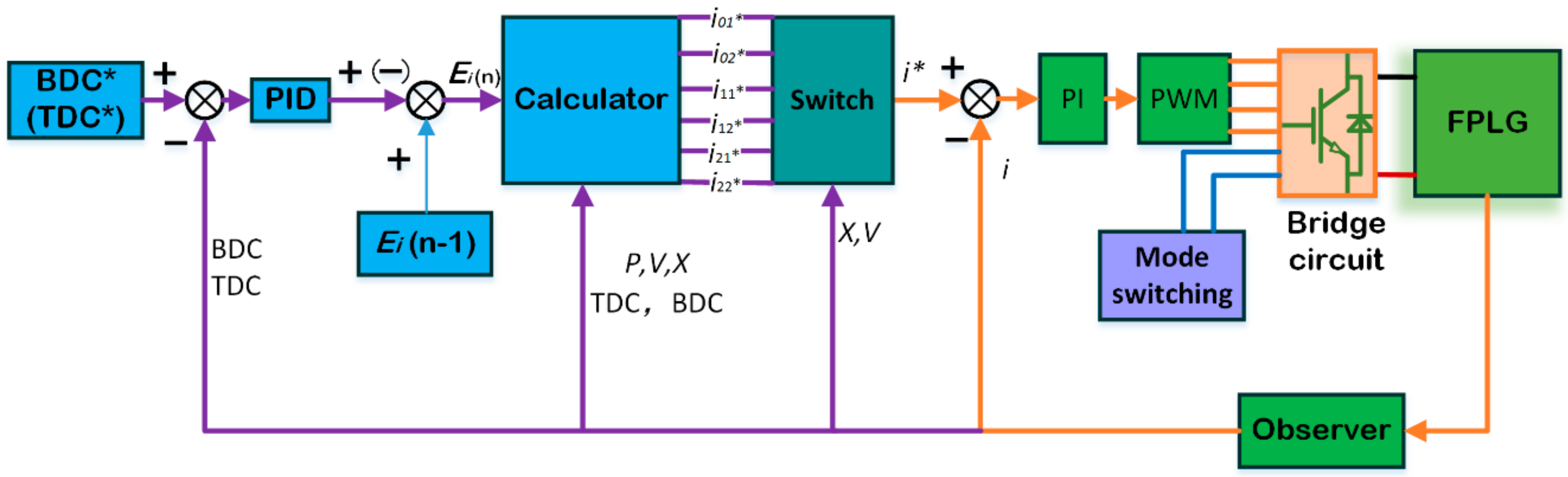
The control diagram is shown in
Figure 7. The errors of the dead centers are fed back to the control loop to adjust piston motion. When the TDC error is positive, the in-cylinder pressure is higher than the set pressure and could result in a detonation combustion phenomenon. When the TDC error is negative, the in-cylinder pressure is insufficient to push the piston to BDC*. On the other hand, a large BDC error indirectly affects the TDC position accuracy. These two situations have an impact on the next cycle and steady power output. Therefore, according to the working conditions, the target currents are continuously regulated until the errors are within a suitable range. The calculation corresponds to (22)–(24), the current switching process is determined according to the piston velocity and displacement. At the same time, the mode switching can switch the state of FPLG between motor and generator based on the working conditions.
6. Simulation Results
In this section, system dynamic response, average output power, piston displacement and average velocity of piston are analyzed to verify the stability and output performance of the FPLG with the ladder-like control strategy. An H-bridge circuit is implemented in these simulations to control the armature current following the reference current.
6.1. The Stability of Ladder-Like Control Scheme
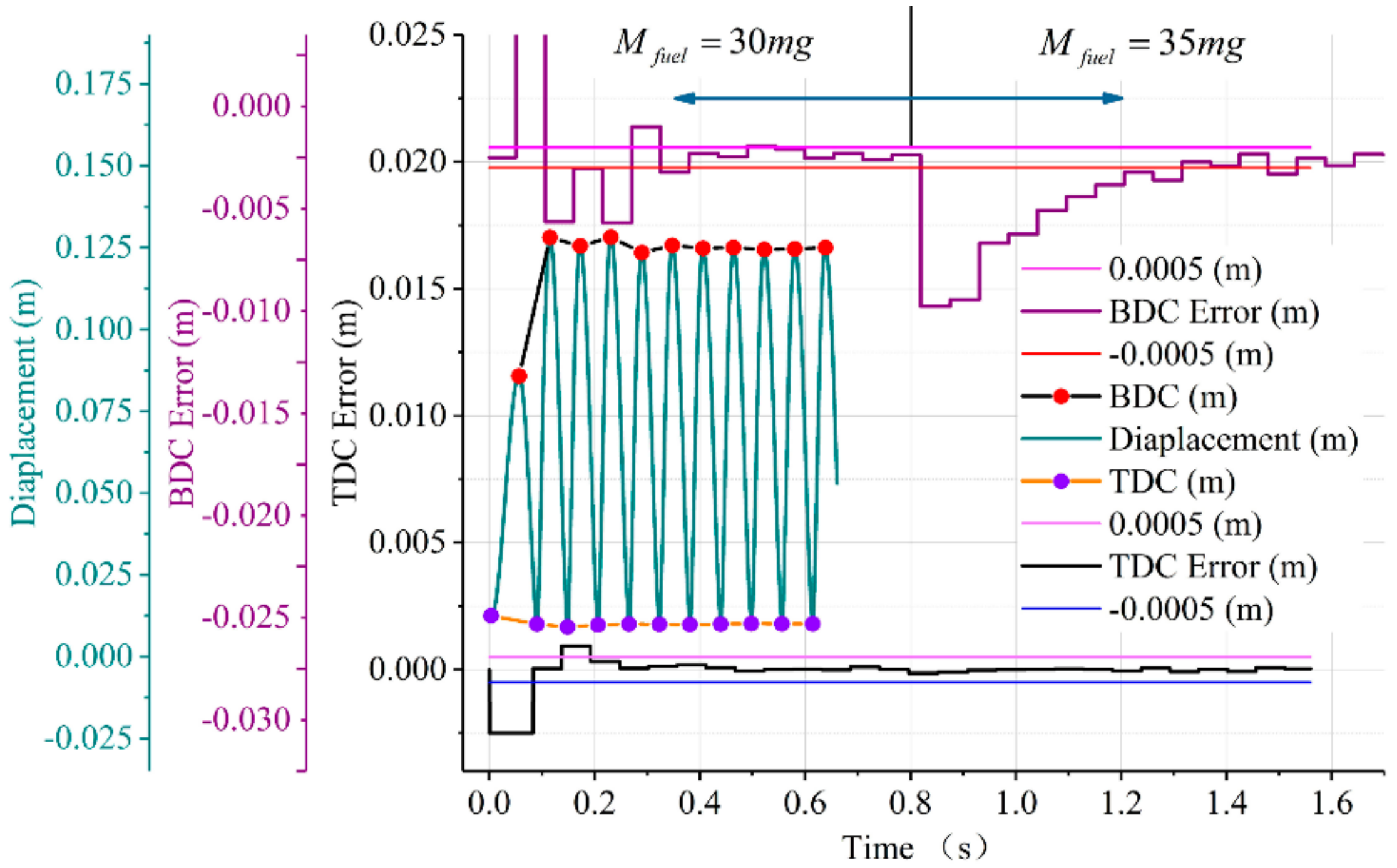
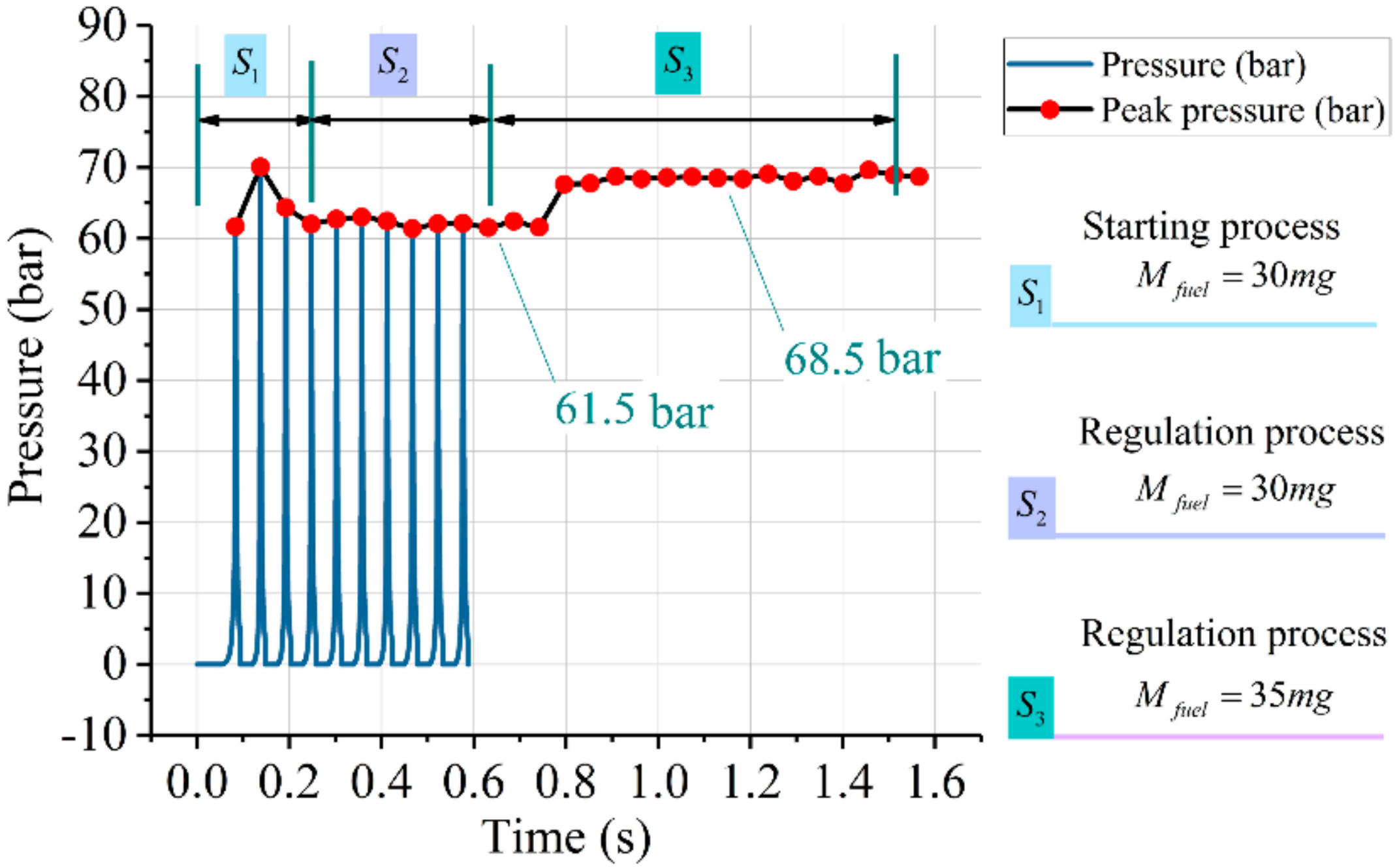
The dynamic response of the FPLG with the ladder-like control strategy is shown in
Figure 13. This figure shows the piston displacement, BDC and TDC errors of the FPLG from the starting process to stable operation. The injected fuel is 30 mg at the beginning, and then it is changed to 35 mg when the FPLG reaches a stable state. From
Figure 13, the BDC error has a large fluctuation when the FPLG is starting and the injected fuel mass is suddenly changed, and it settles into a stable band from −0.5 mm to +0.5 mm after several cycles. The position control of TDC has a strong stability performance under this control strategy. The TDC errors are within the stability band even when the injected fuel mass has a 5 mg step changes. The accurate TDC position determines the stability of the whole system. Therefore, the FPLG can be controlled steadily when the fuel mass has a step change within 16% under the ladder-like control scheme.
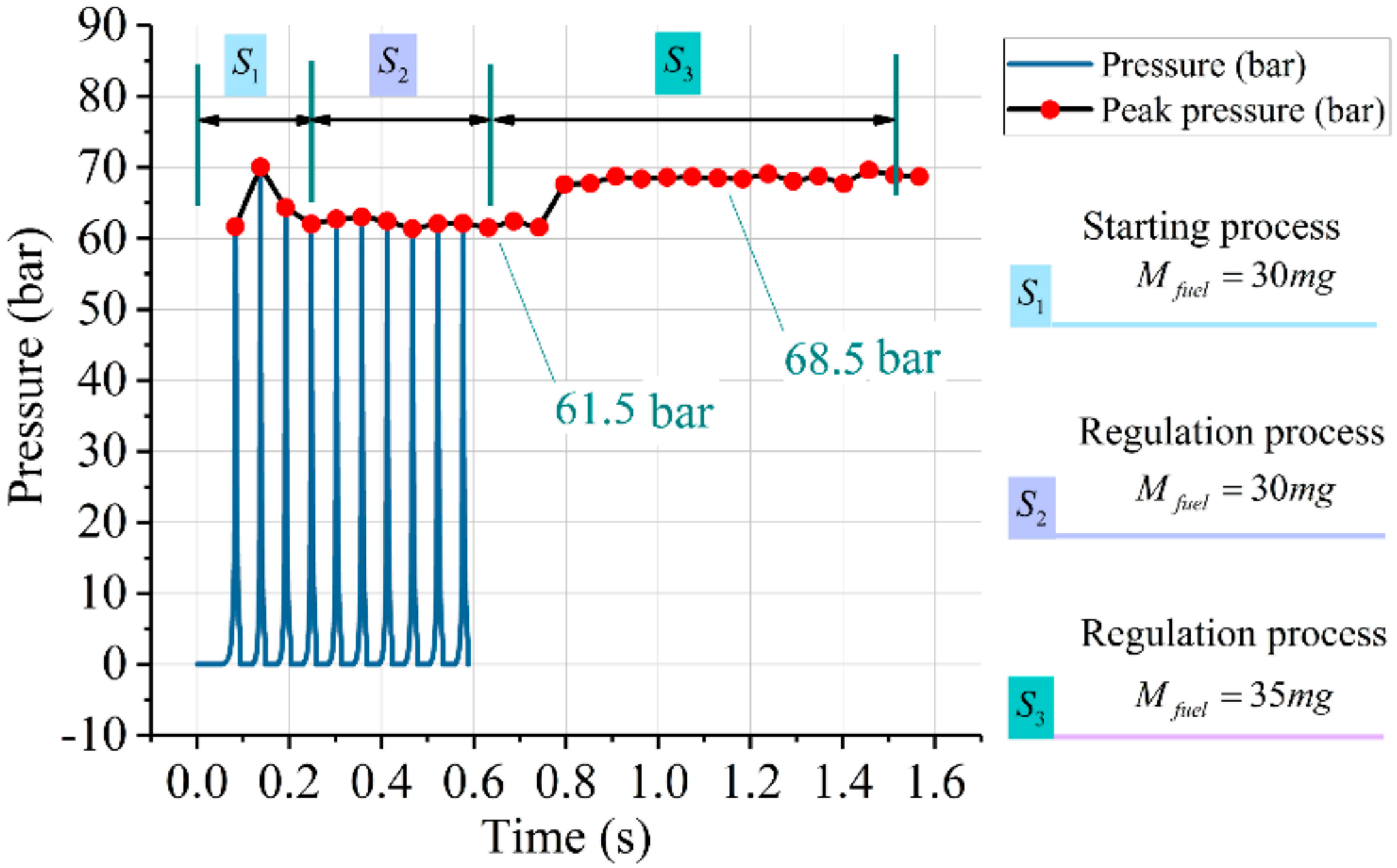
Figure 14 shows in-cylinder pressure from the starting process and when the injected fuel mass changes. The peak pressure increases to a higher value steadily when the fuel mass changes to 35 mg. The smooth control of peak pressure reflects the feasibility of the ladder-like strategy.
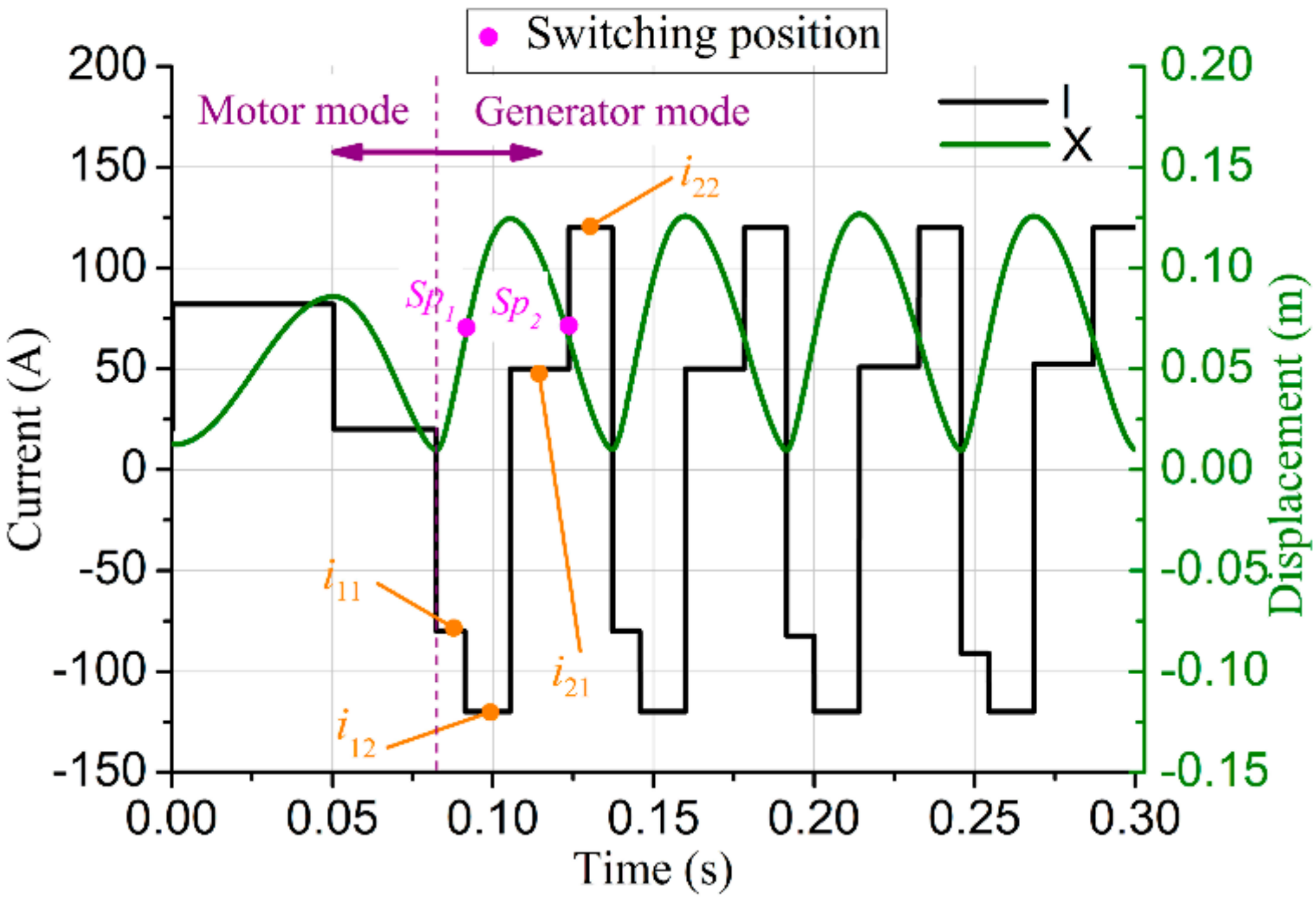
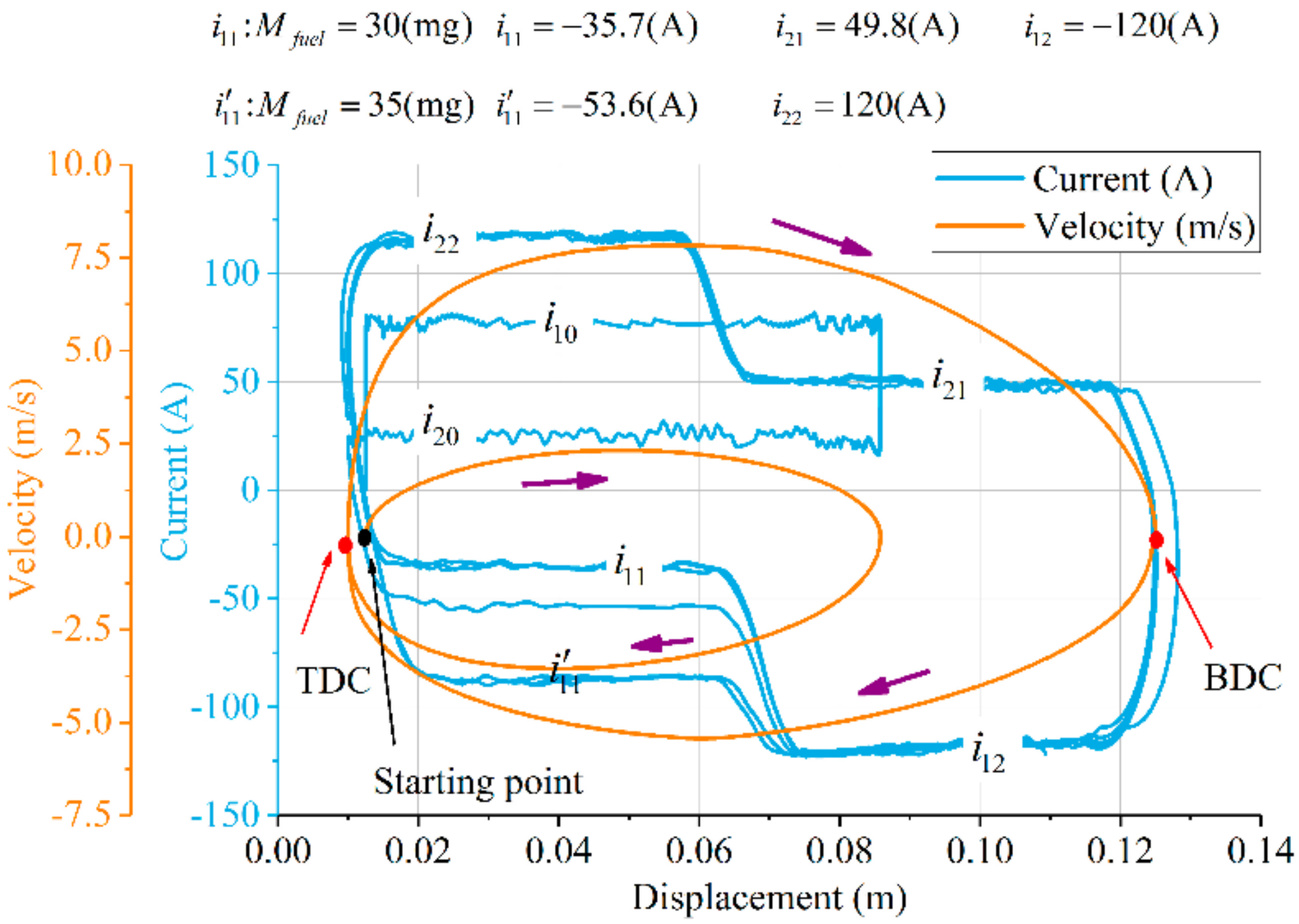
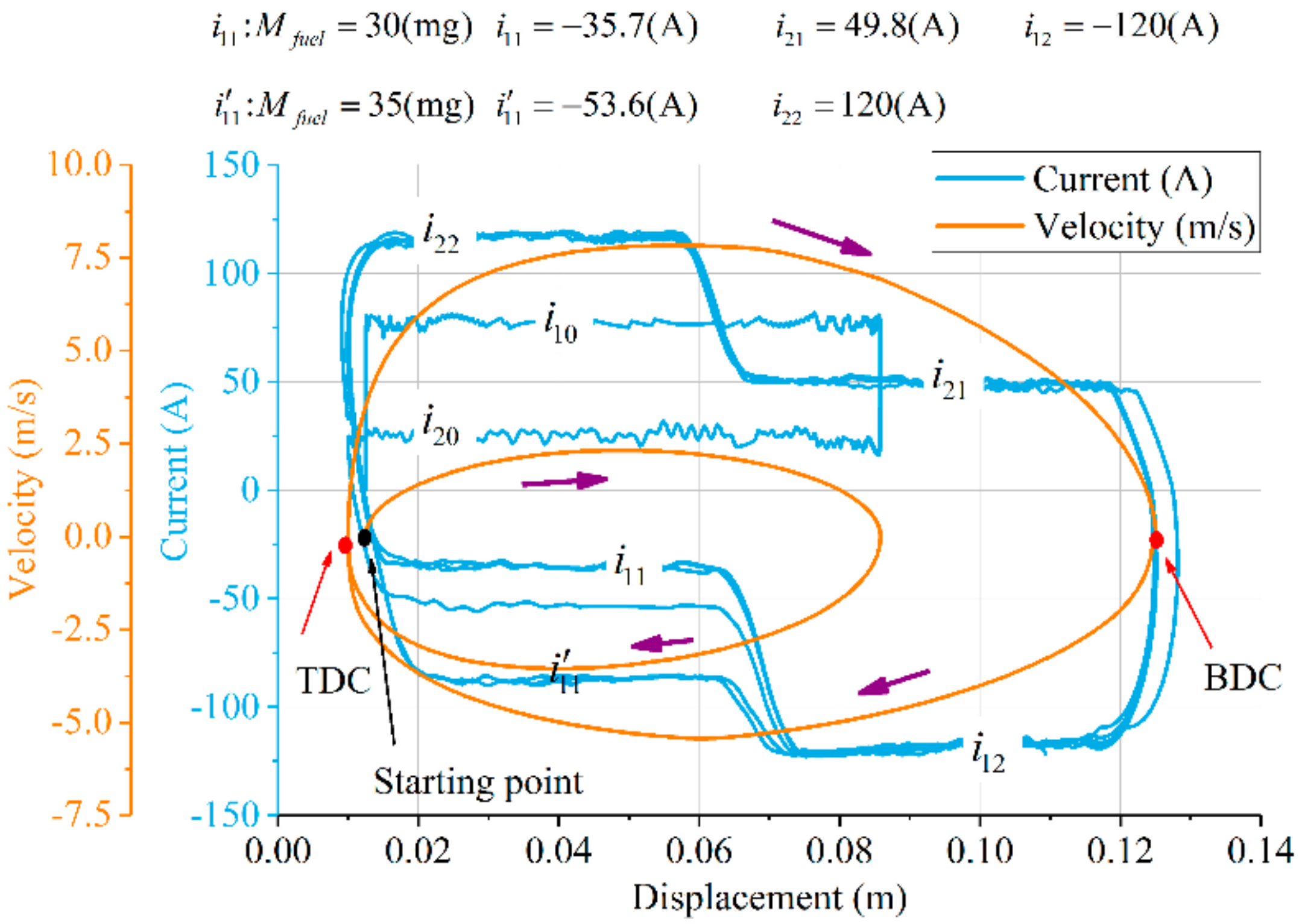
Figure 15 shows the changes of the currents under different fuel mass in stable stage. As shown in
Figure 6,
i10 and
i20 are the starting current, which correspond with the displacement from starting point to BDC
1 and the displacement from BDC
1 to TDC, respectively.
i11 () and i12 are the regulated currents in expansion stroke, these are correspond with the displacement from TDC to BDC. i21 and i22 are also the regulated currents in the compression stroke; there correspond with the displacement from BDC to TDC. Their reference currents can be calculated by the Equations (22), (27)–(29). When the fuel mass changes from 30 to 35 mg, the value of i11 (−35.7 A) increases to (−53.6 A). However, the others currents have a minor variation. Therefore, the combustion fluctuations are restrained by i11, and can be controlled effectively to accommodate the different fuel masses under the study strategy.
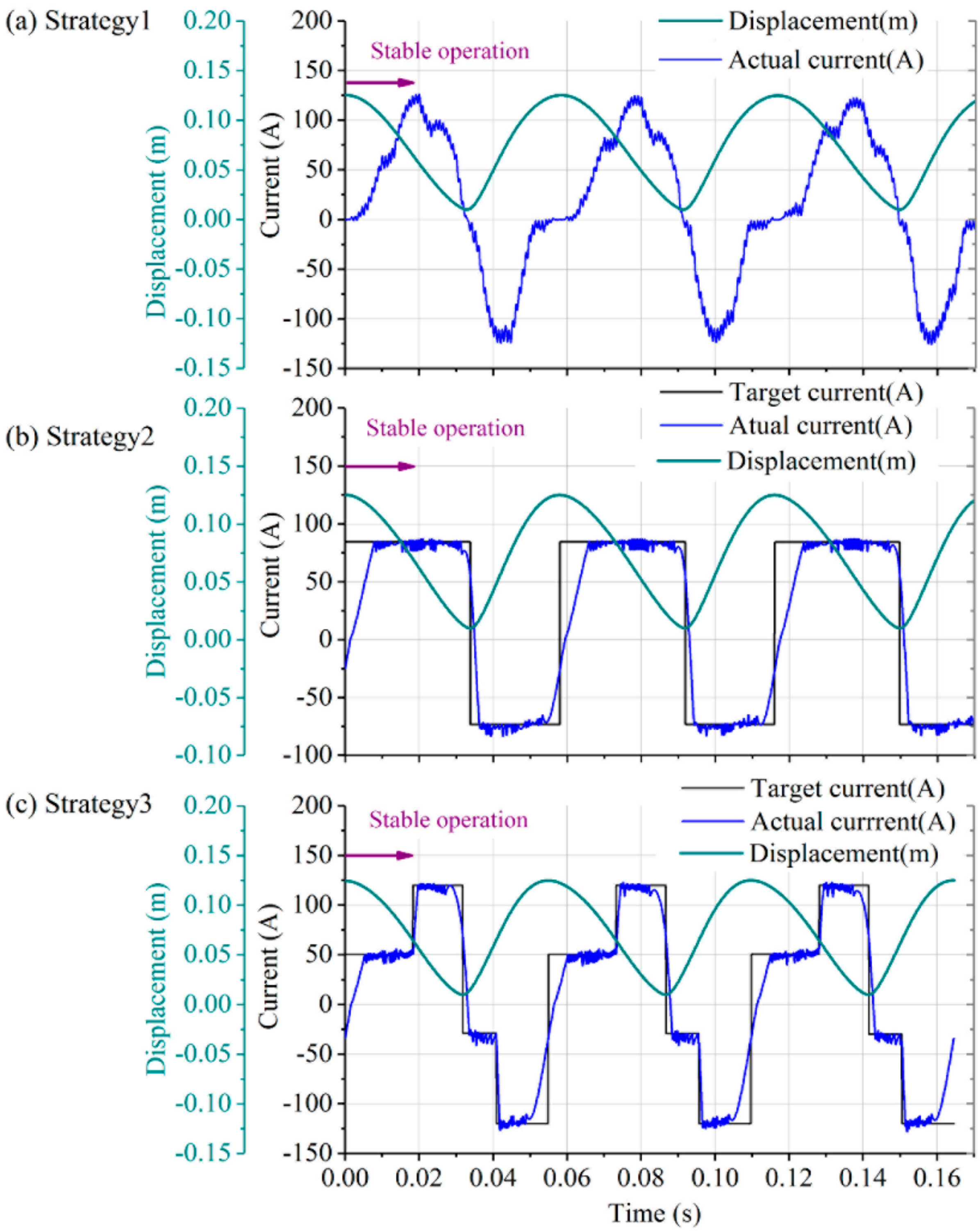
6.2. The Comparative Analysis of Three Control Strategy
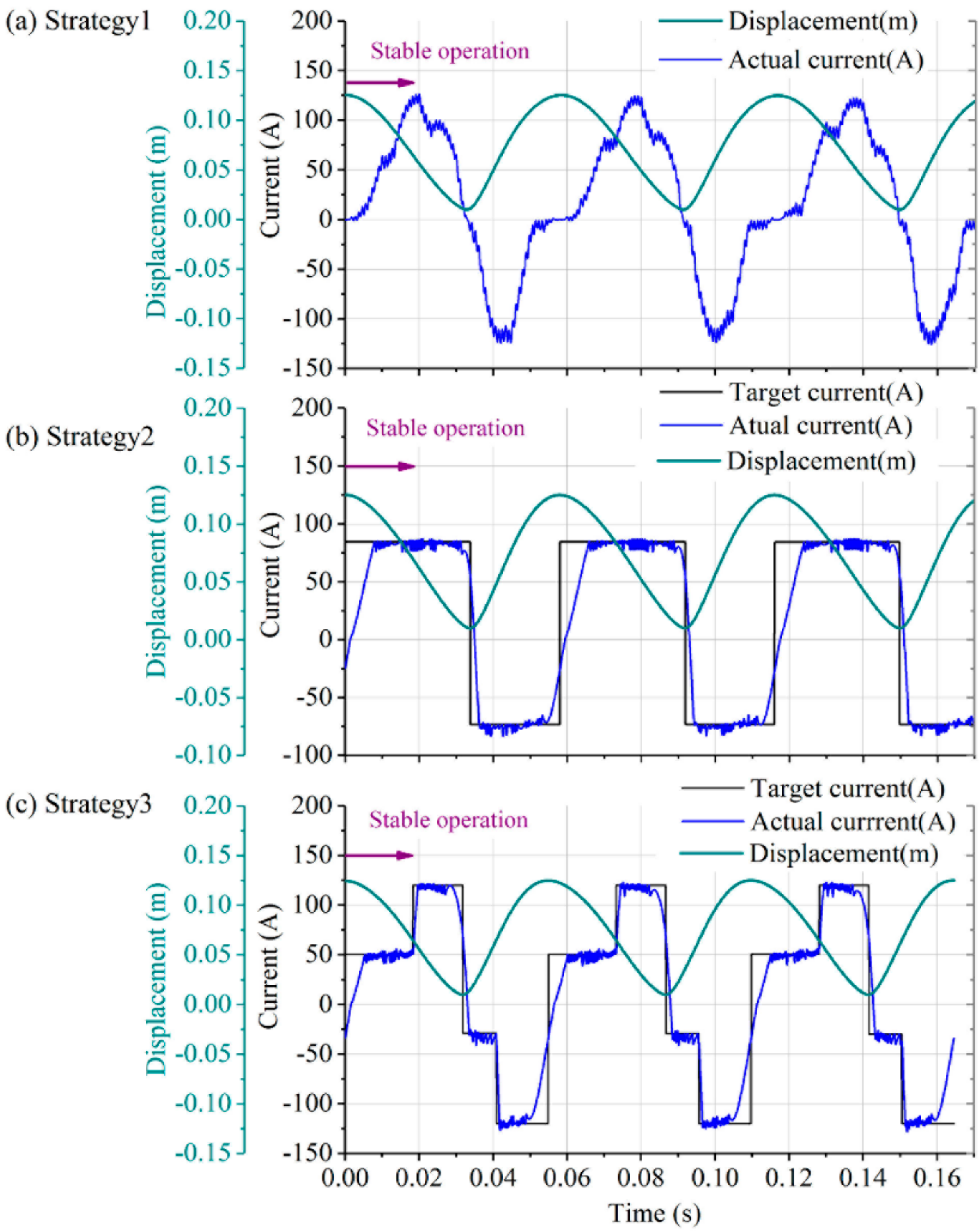
Comparisons of three control strategies when the FPLG is in stable operation are shown in
Figure 16.
Figure 16a shows the control strategy that the load coefficient and combustion parameters are regarded as the control variables, which is defined as strategy 1. The electromagnetic force of this control strategy is
.
Figure 16b shows the constant force control strategy during one stroke, which is defined as strategy 2.
Figure 16c shows the ladder-like force control strategy under study, which is defined as strategy 3. In order to ensure the input energy is the same, the experiment setup is defined as: fuel mass is 30 mg,
xigs = 12 mm, the dead centers are BDC = 125 mm and TDC = 10 mm.
Figure 16 also states that the change of the armature current follows the reference current.
From
Figure 16, the actual current changes under strategy 1 are proportional to the velocity of piston. Especially, the starting of expansion stroke, the change of the current is faster than other zones. The starting of compression stroke, the changes of currents under three control strategies are similar. The actual currents of strategy 2 and strategy 3 are following the reference currents, this states the power converter unit is effective to control the LEM armature current.
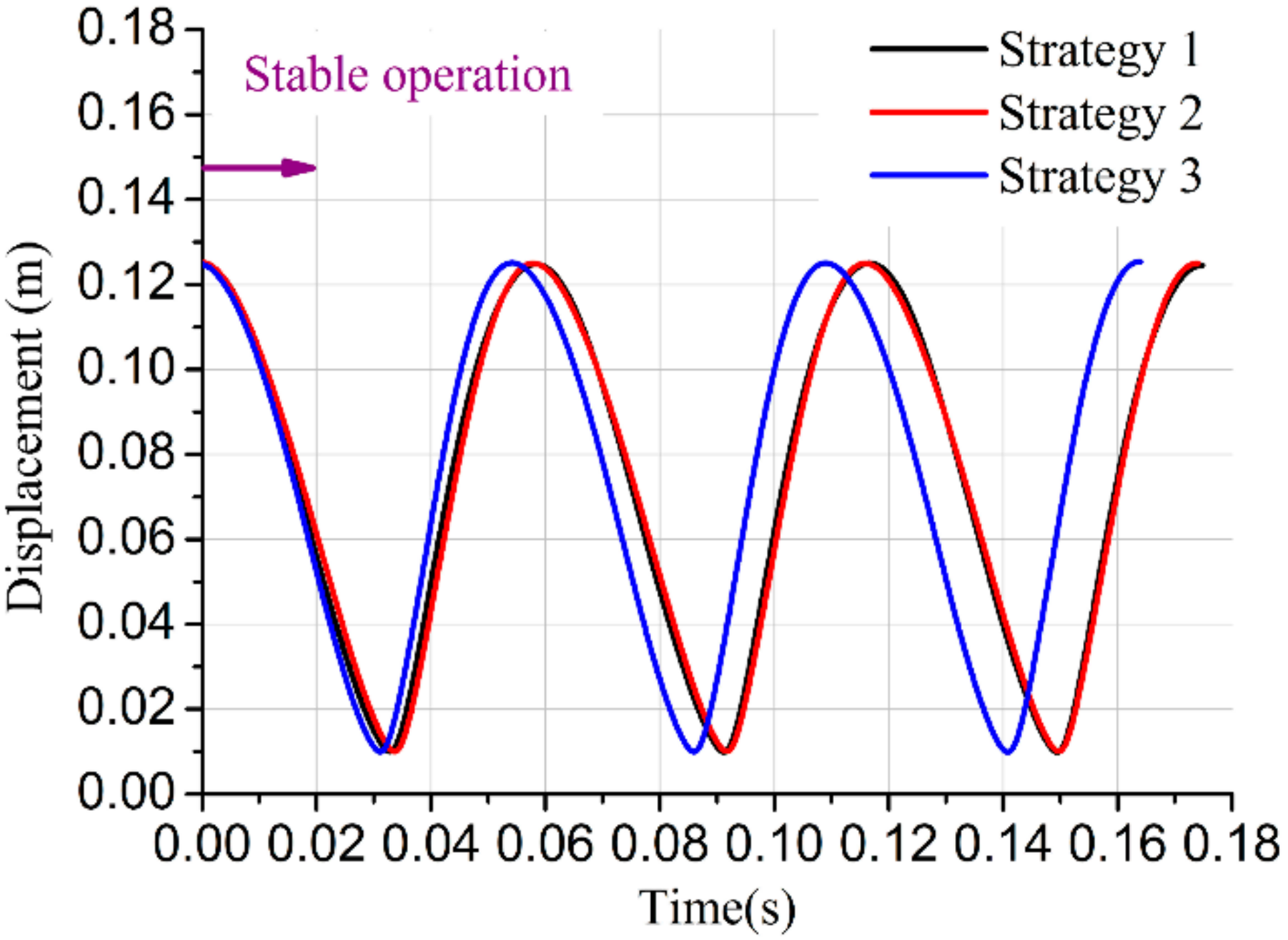
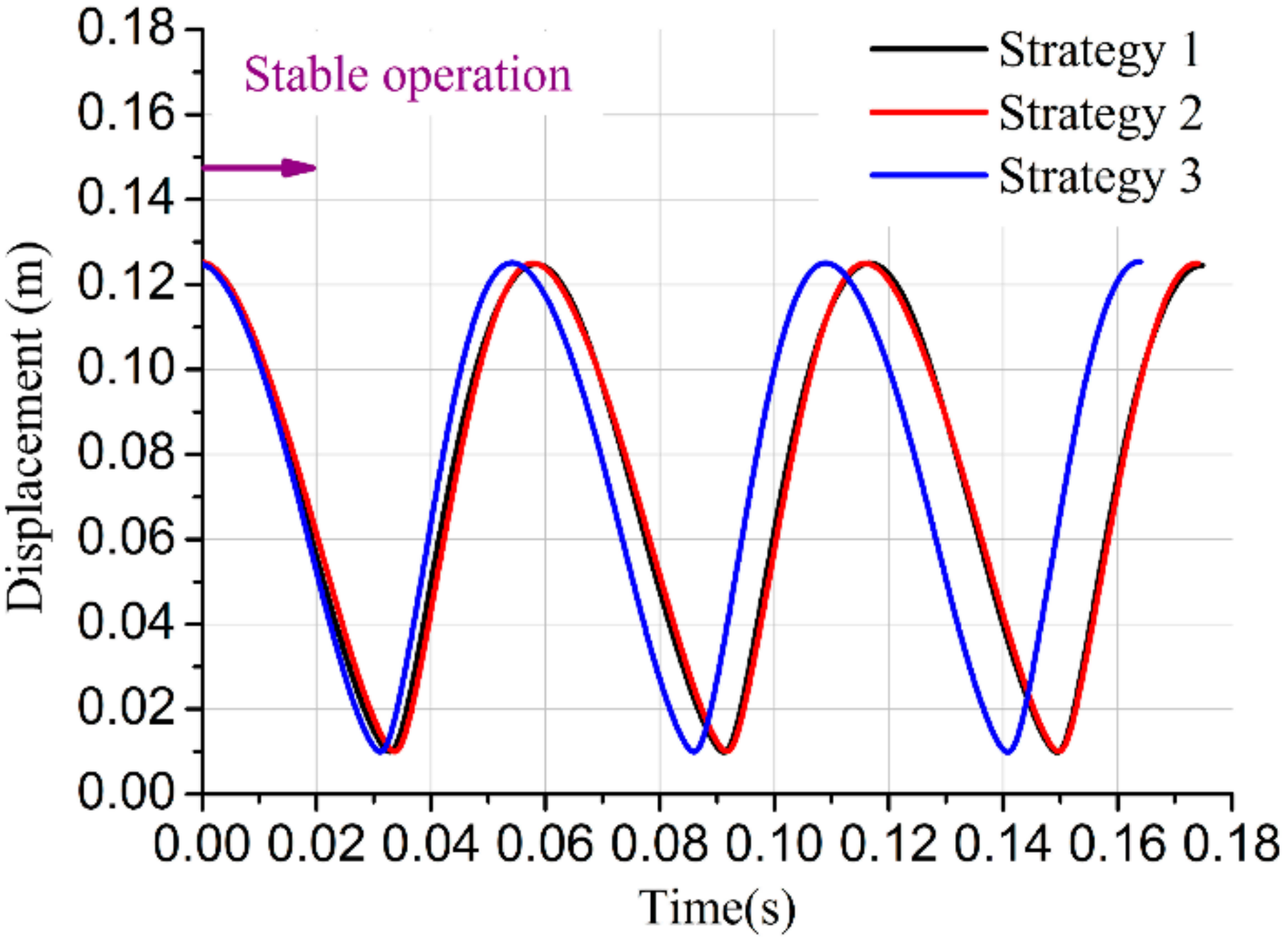
In
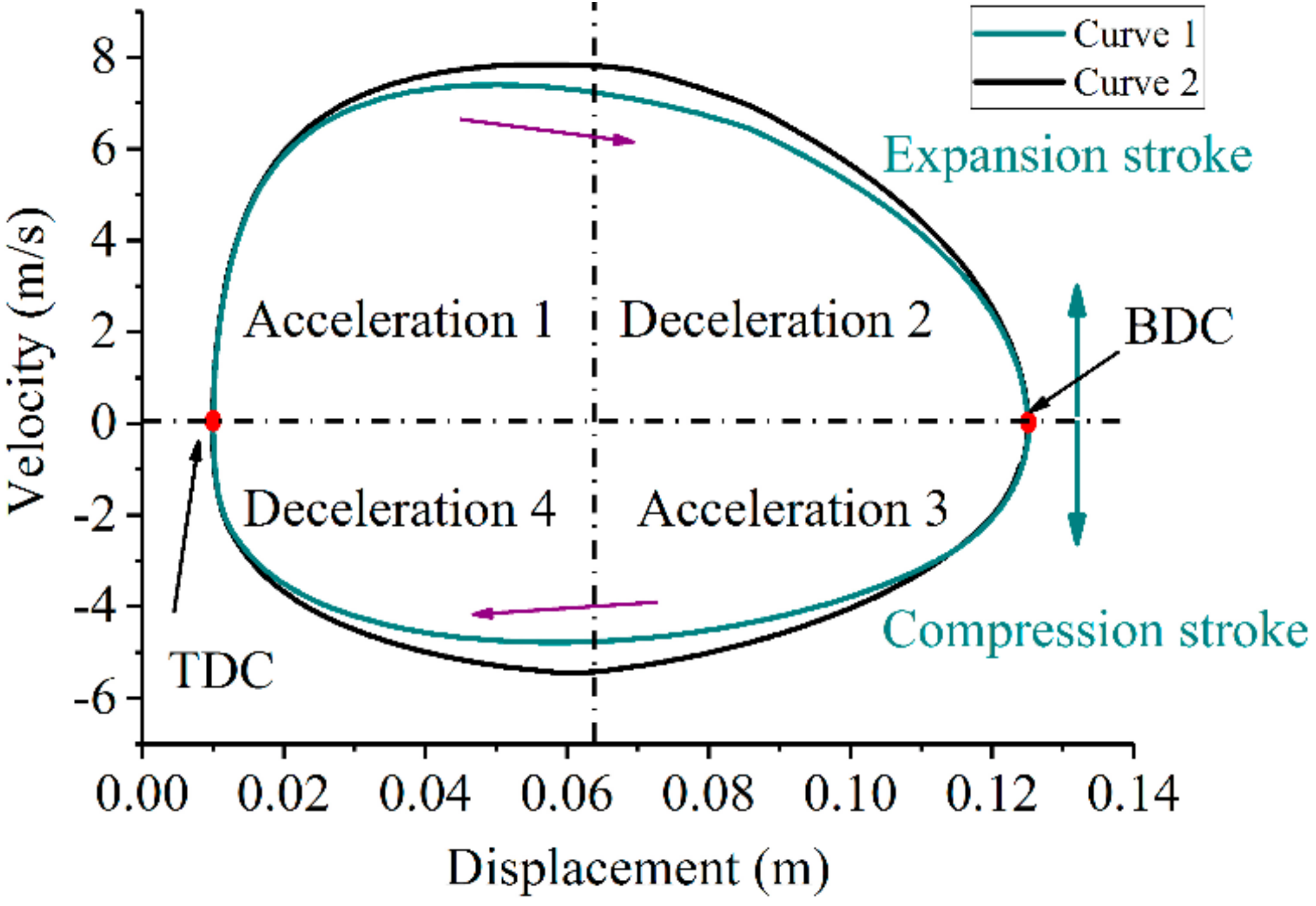
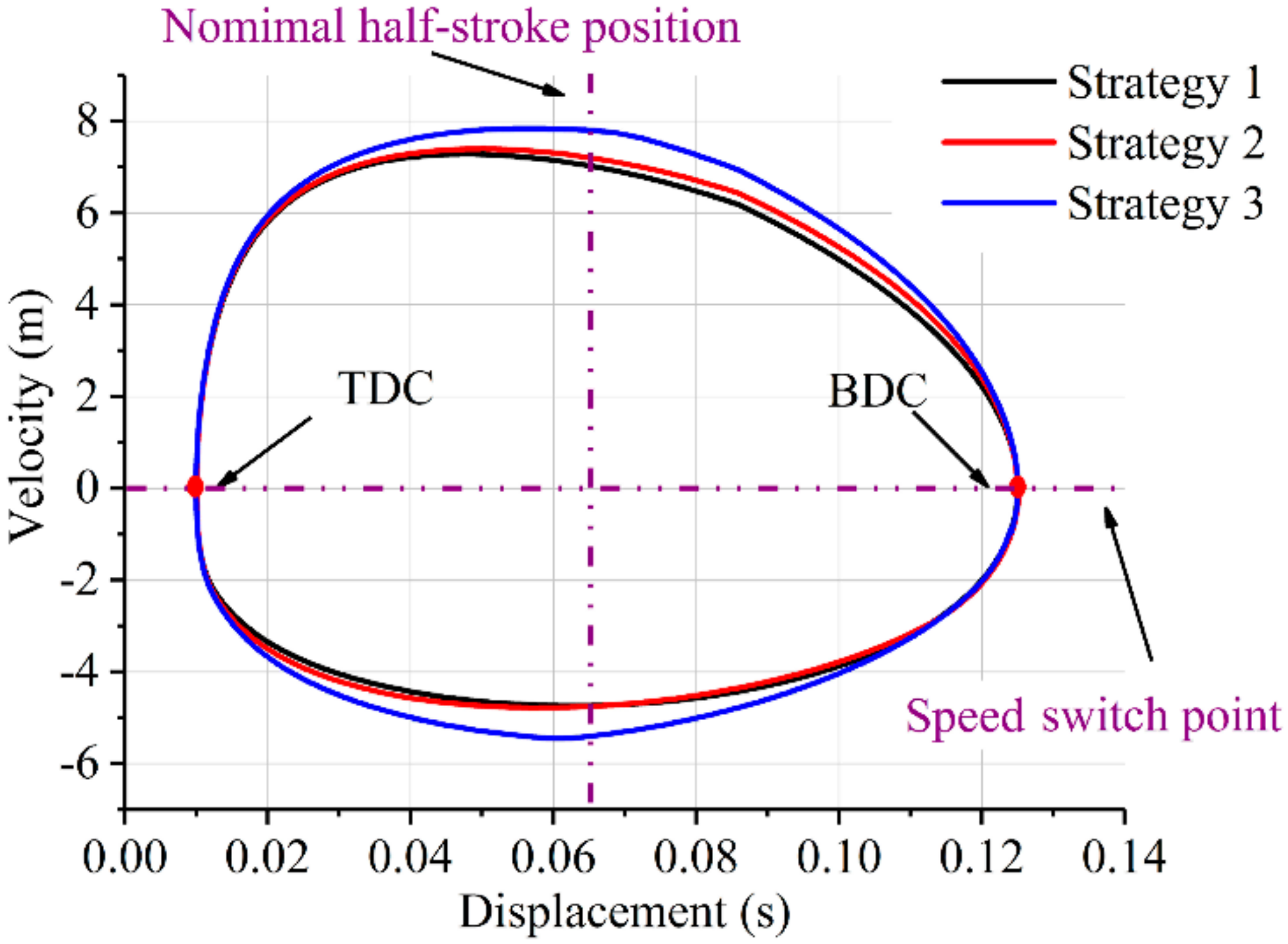
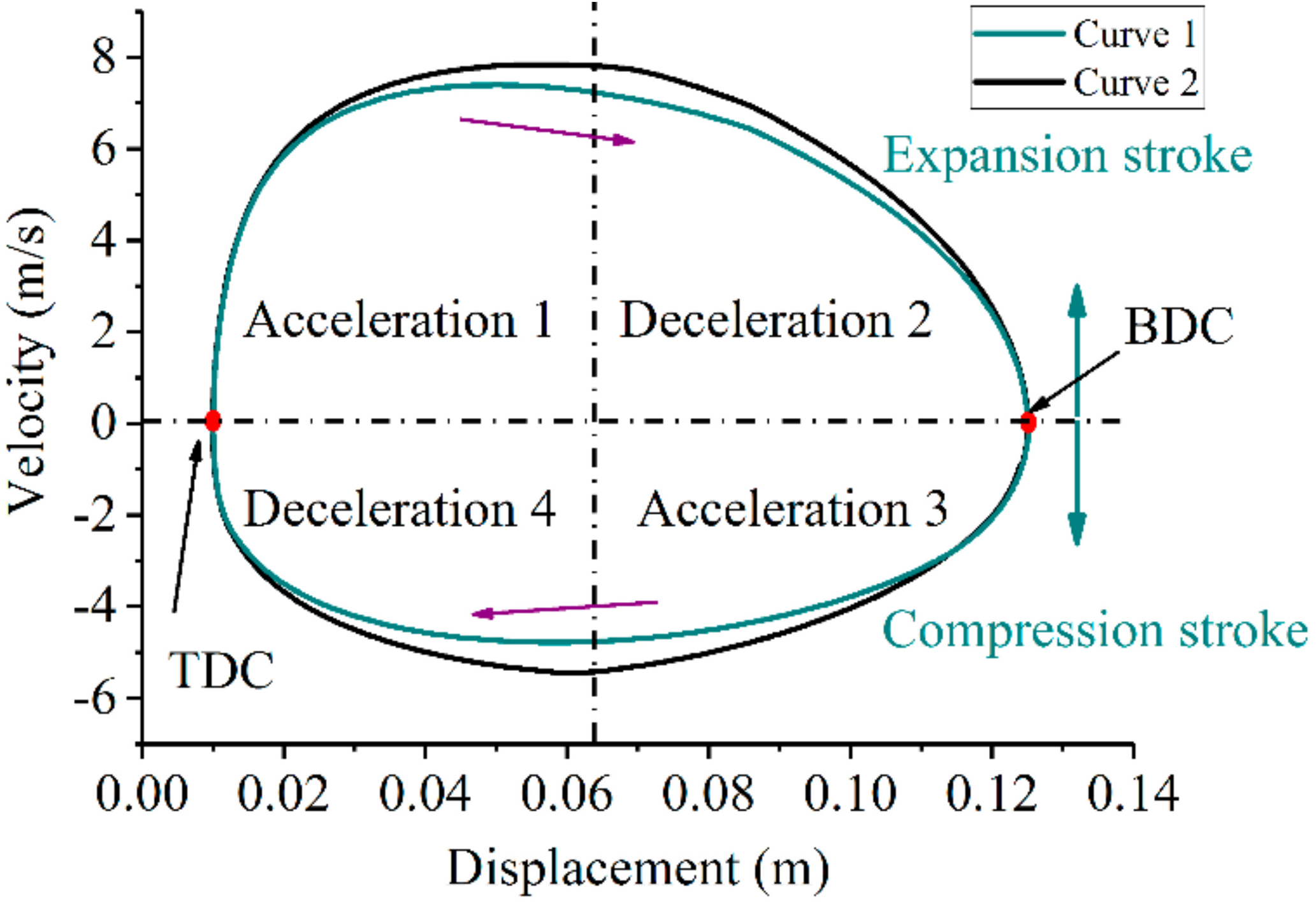
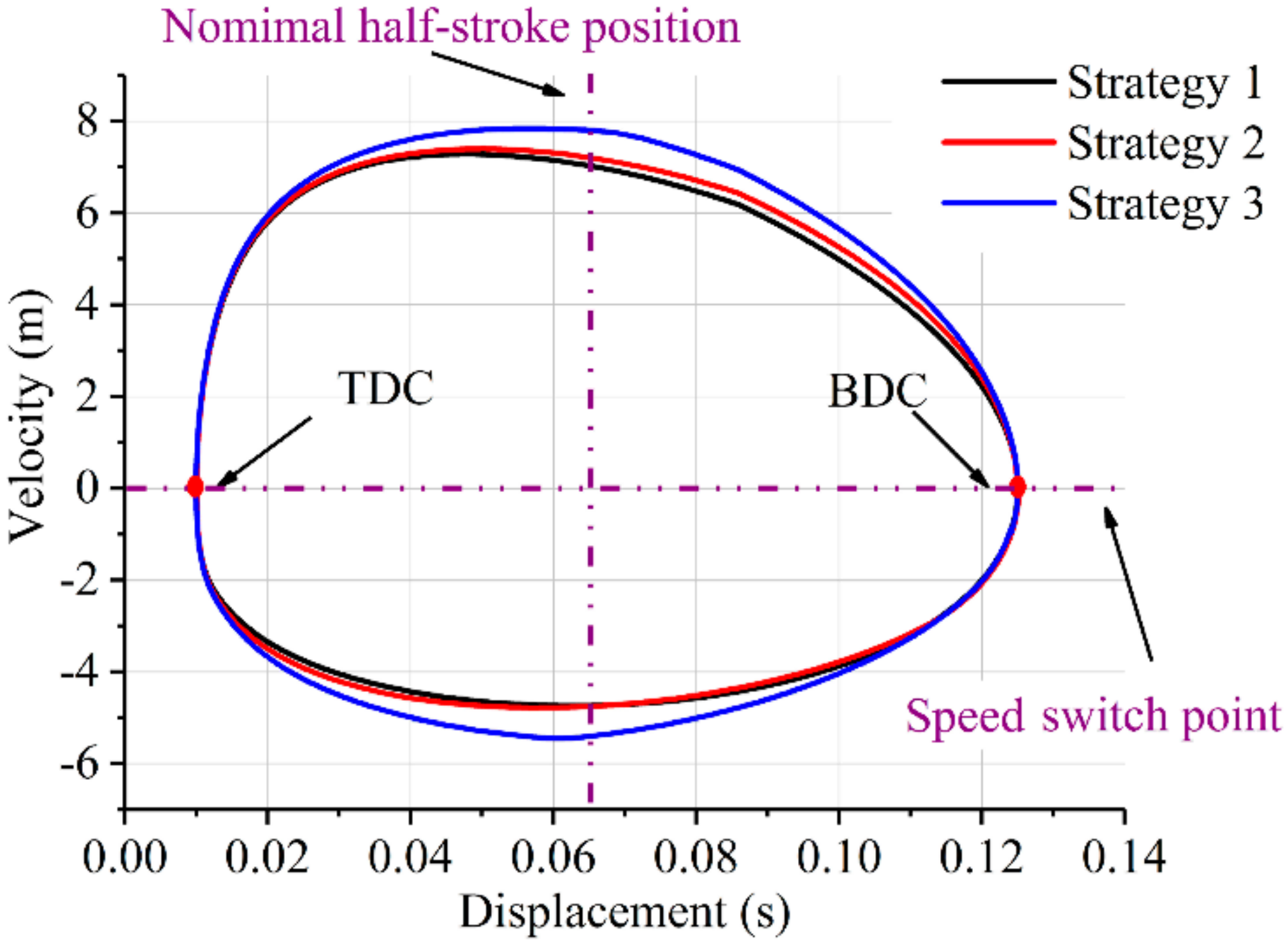
Figure 17, the displacements of the three control strategies are compared, the initial position and time are unified. This figure shows that the control strategies 1 and 2 almost have no difference on the duration of one cycle, but that of the control strategy 3 is shorter. This illustrates that the piston has a higher average velocity under our ladder-like control strategy. The phase trajectories of three control strategies are compared in
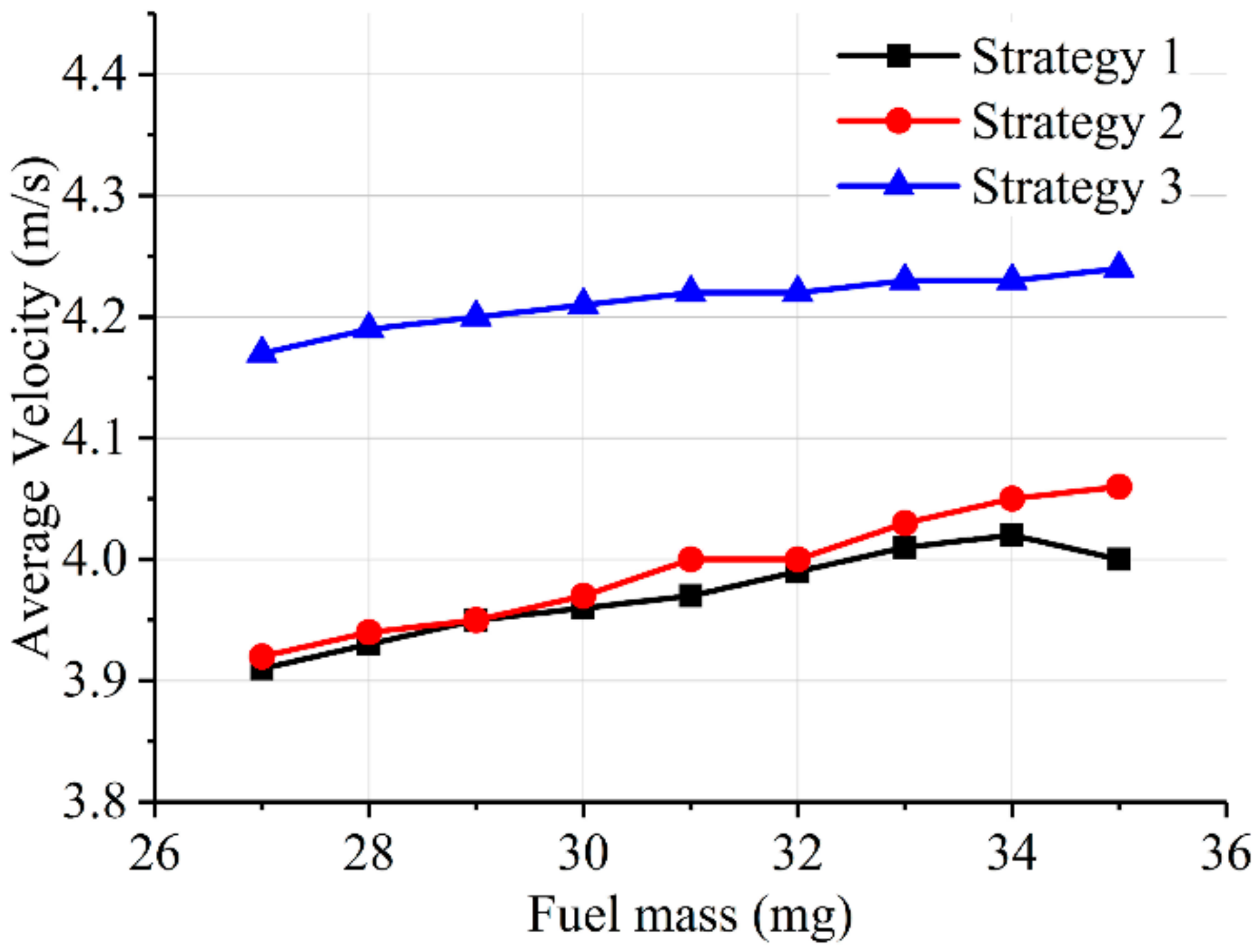
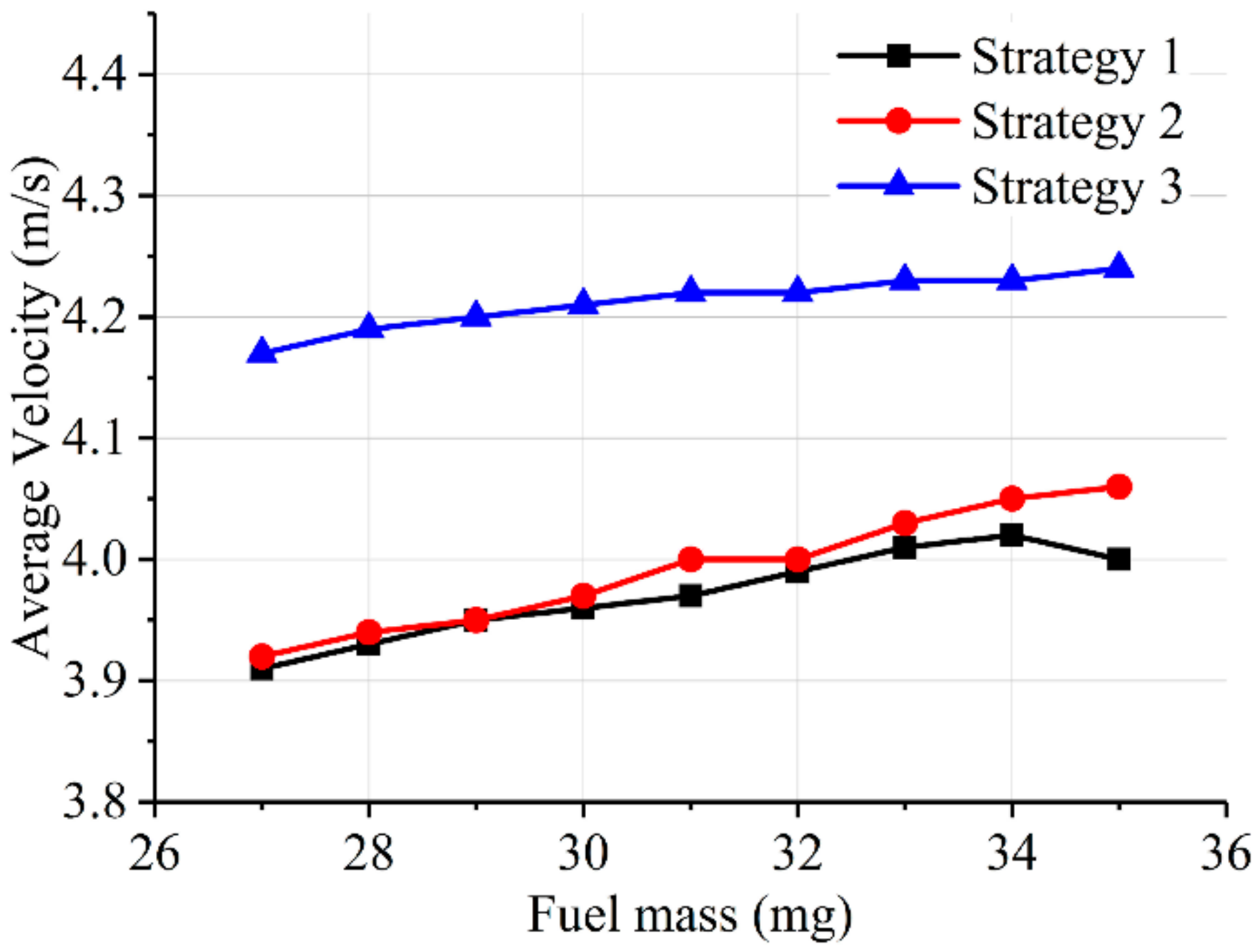
Figure 18. The piston velocities of expansion and compression stroke have an increment under strategy 3. In addition, the average velocity of the piston is simulated under different fuel mass. The change range of fuel mass is increasing from 27 to 35 mg by 1 mg each time. In
Figure 19, the blue curve is the result of the average velocity using the ladder-like strategy, the average velocity is significantly higher than with the other control strategies. At the same time, the velocity of strategies 1, 2 and 3 is increasing along with the increasing fuel mass, respectively.
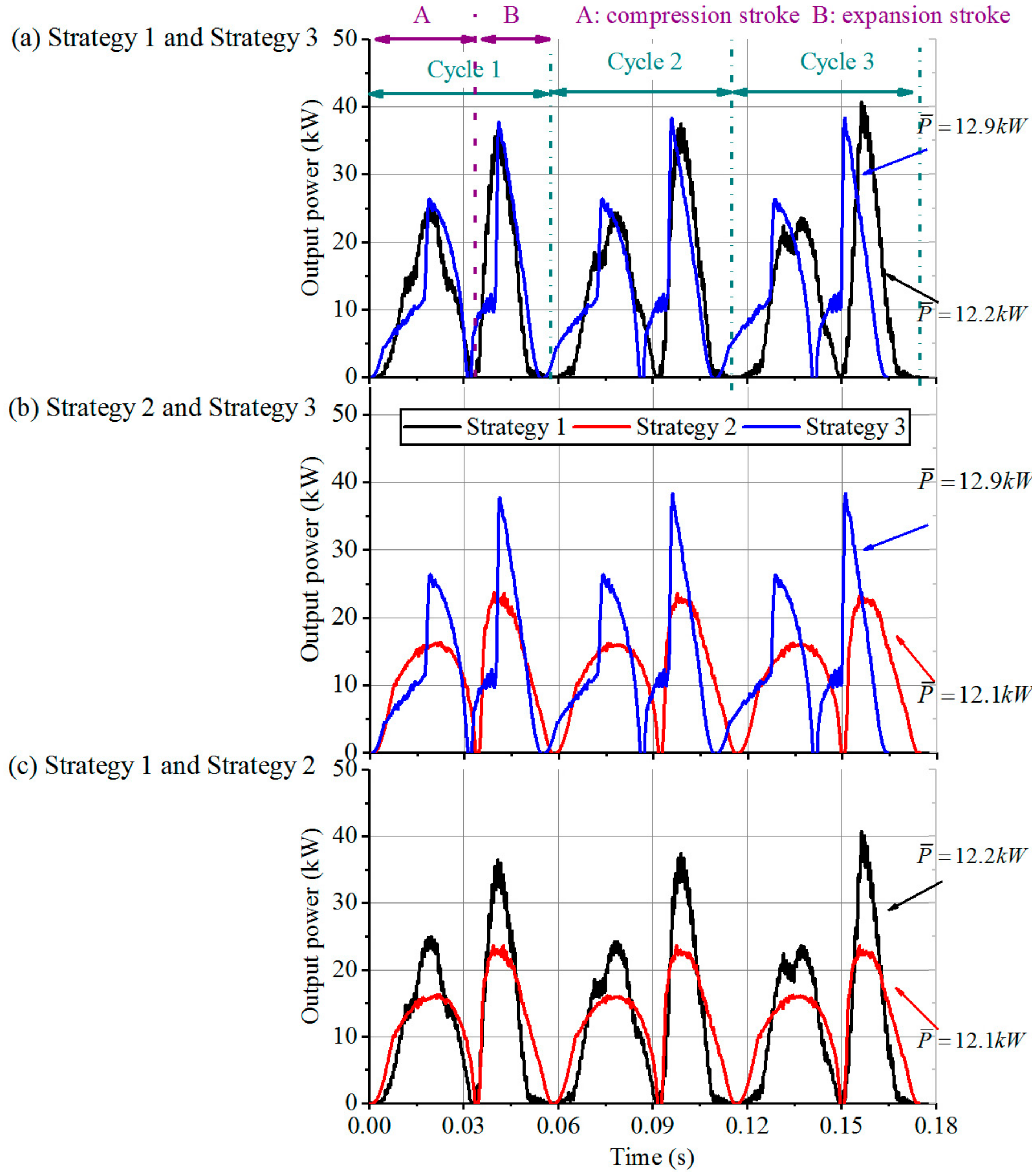
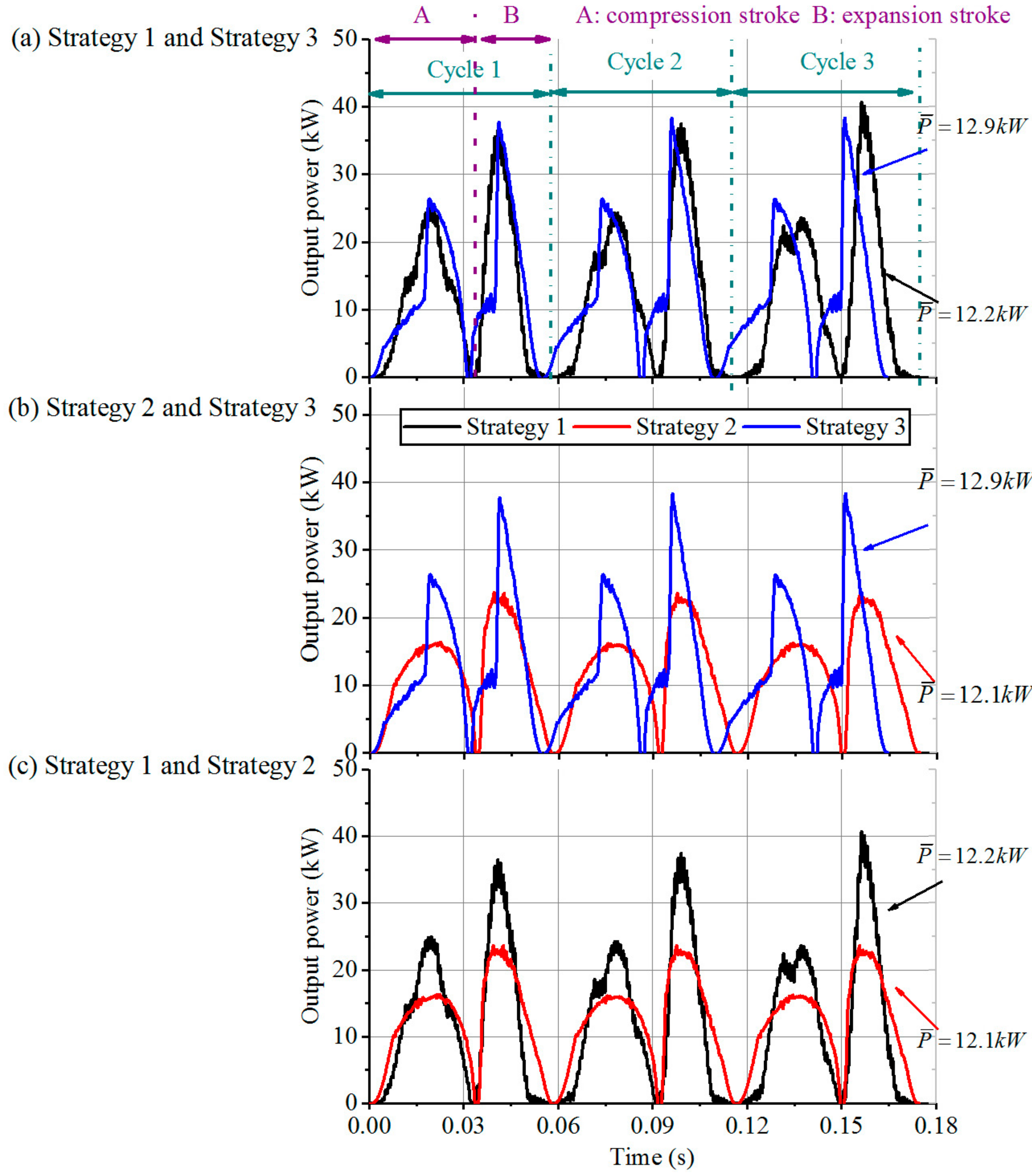
In
Figure 20, the instantaneous power of three control strategies are compared. The results are obtained when the fuel mass is specified to be 30 mg. In
Figure 20a, the average power of strategy 1 is 12.2 kW, which is less than the average power of the strategy 3, 12.9 kW, although their peak values are similar. It is because the average velocity of strategy 3 is higher as shown in
Figure 19. In
Figure 20b, the strategy 3 has larger amplitude and average power than strategy 2. In
Figure 20c, there is no significant difference on average power, though the strategy 1 has larger peak values than strategy 2.
Through analyzing the results above, the strategy 3 has a faster operation frequency when the injected fuel masses are identical. The reduction of electromagnetic force in the acceleration zones and increment of the electromagnetic force in deceleration zones can effectively improve the average velocity of the piston, which contributes to the rapid conversion of energy. Therefore, the average output power of system has a promotion with ladder-like electromagnetic force. Meanwhile, the results are also consistent with the Equation (25).
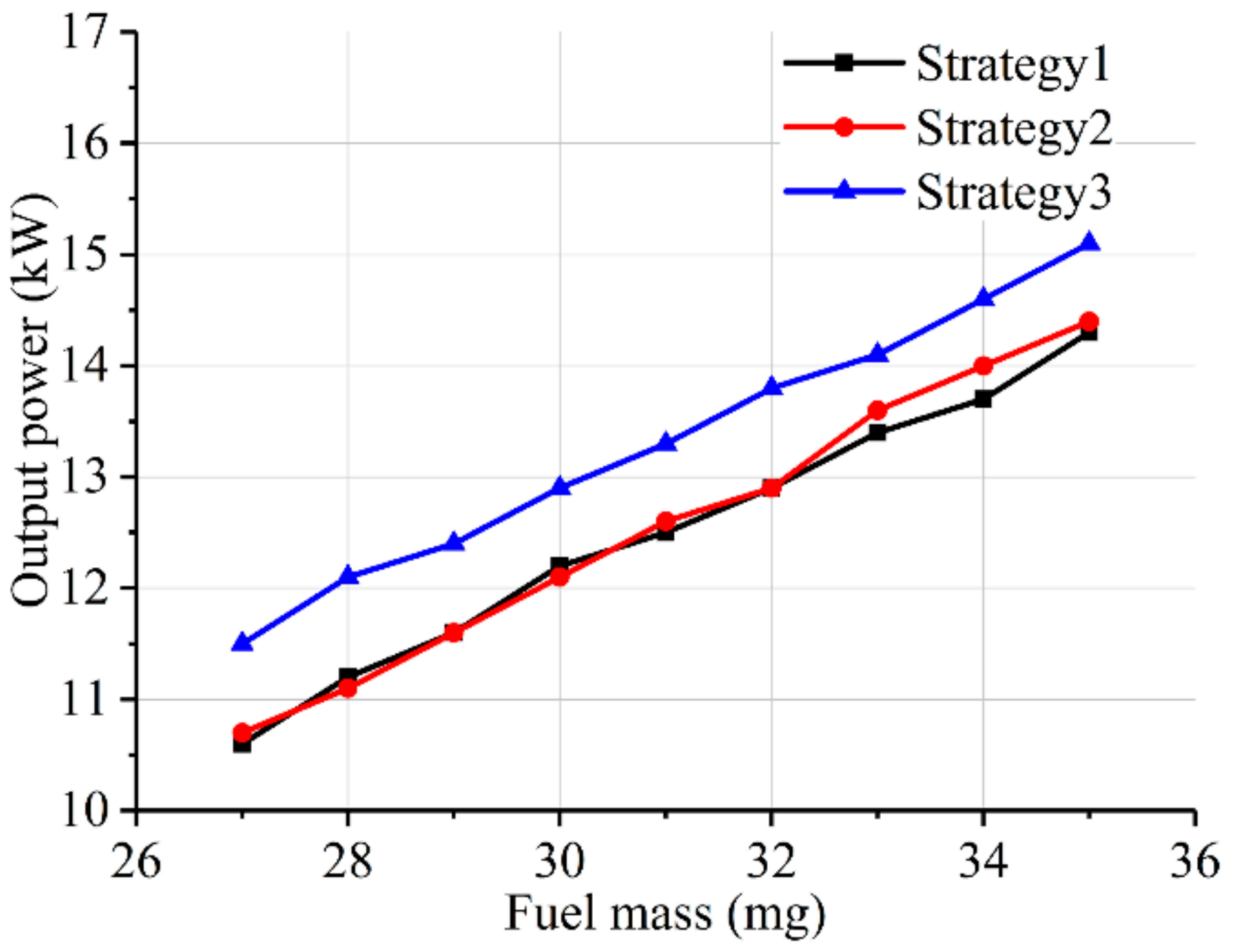
Figure 21 shows that the average power is probably 1 kW higher than two conventional control strategies under the same fuel cycle mass from 27 to 35 mg. From the other view, the proposed ladder-like force control strategy can reduce the operation time by around 7–10% when the work done is the same.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}