Applications of Digital-Physical Hybrid Real-Time Simulation Platform in Power Systems

 , ,
, ,
Abstract
:1. Introduction
2. Digital-Physical Hybrid Real-Time Simulation Platform and Accuracy Evaluation Method
2.1. Overview of the Hybrid Simulation Platform
2.2. Methodology for Hybrid Simulation
2.3. Proposed Accuracy Evaluation Method for Hybrid Simulation
3. Case Validation Based on Fault Recurrence of Power Systems
3.1. Case Description and Modelling
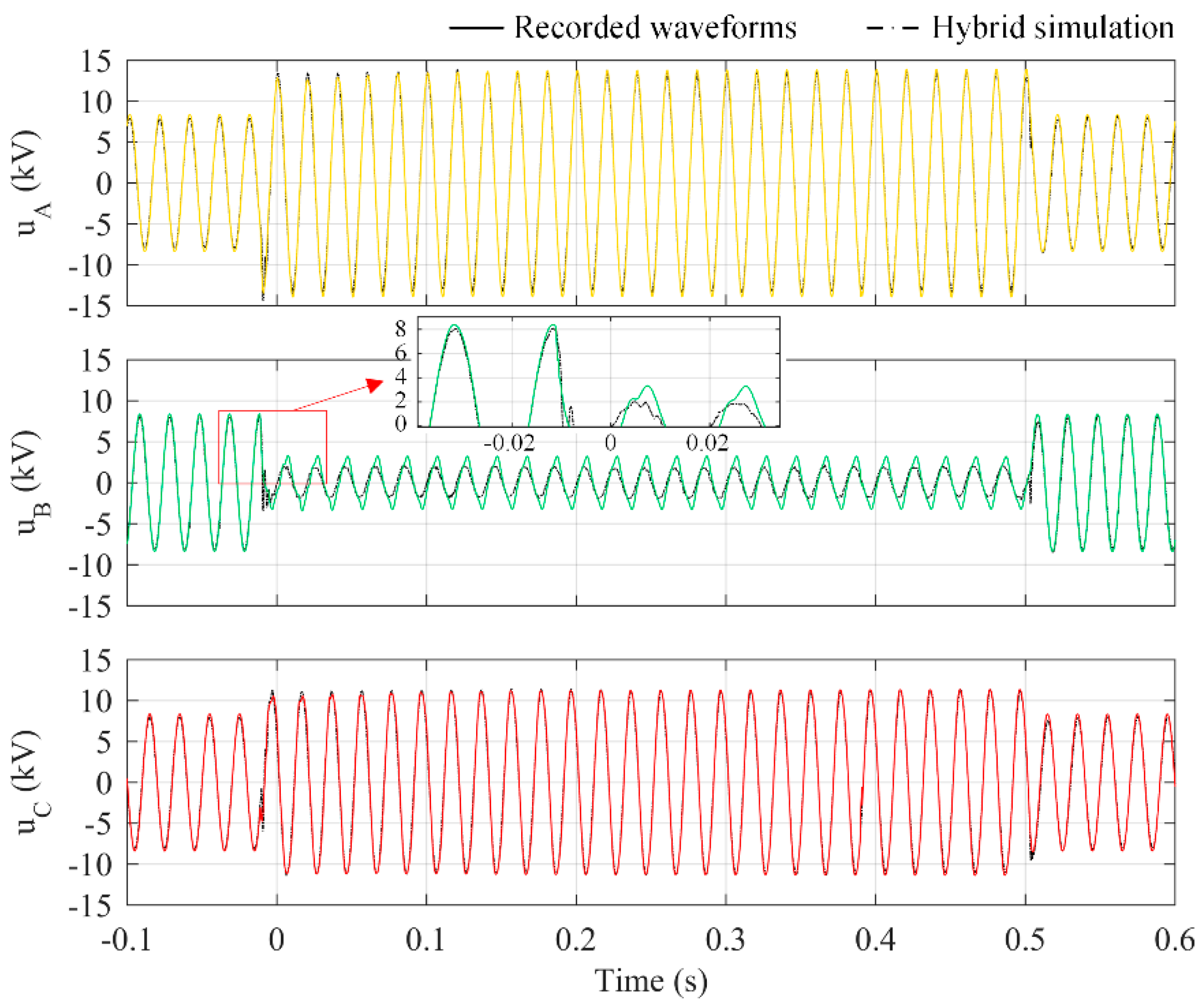
3.2. Result of Case I
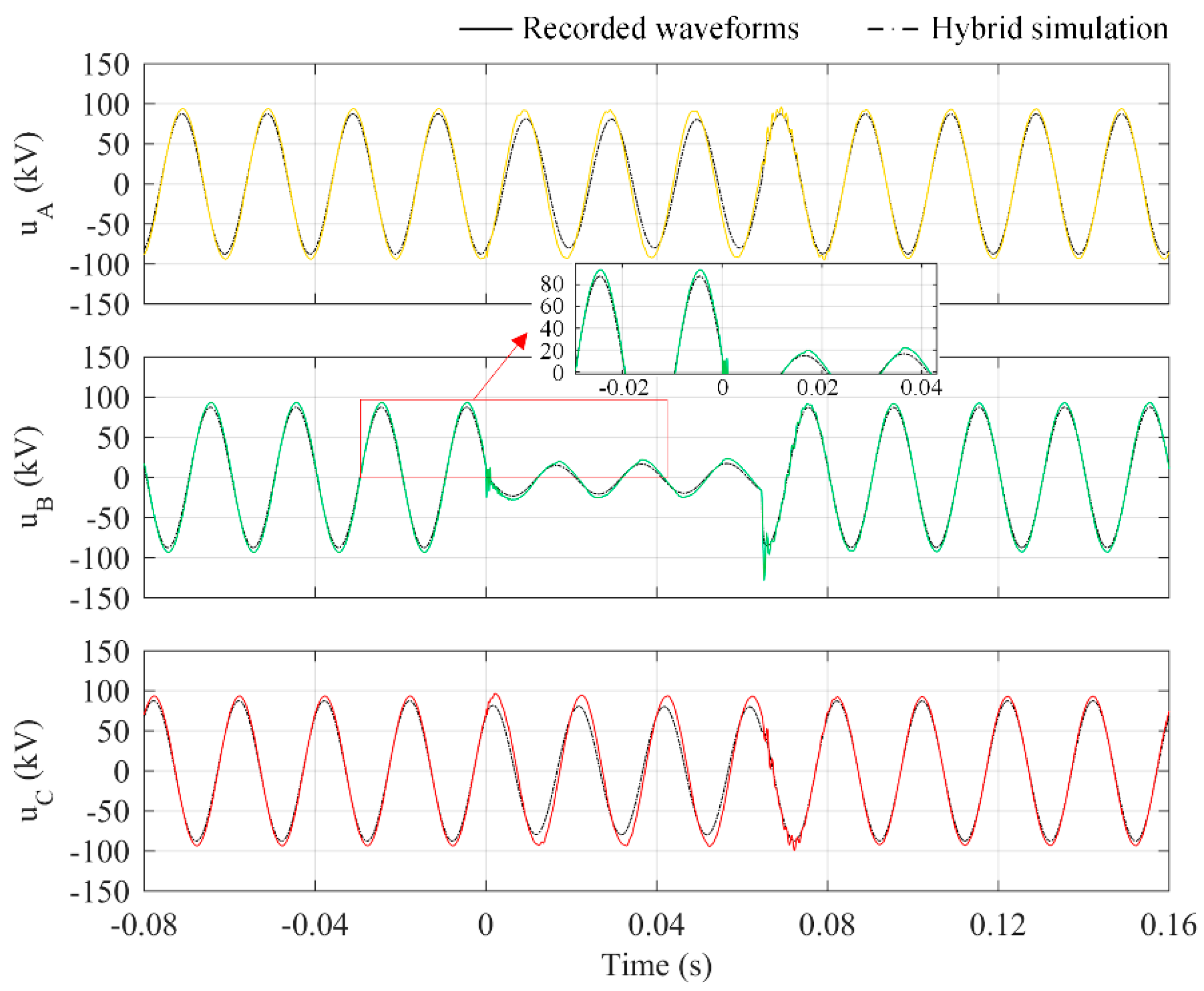
3.3. Result of Case II
4. System-Level Testing of SVG
4.1. SVG Input Voltage Range Testing
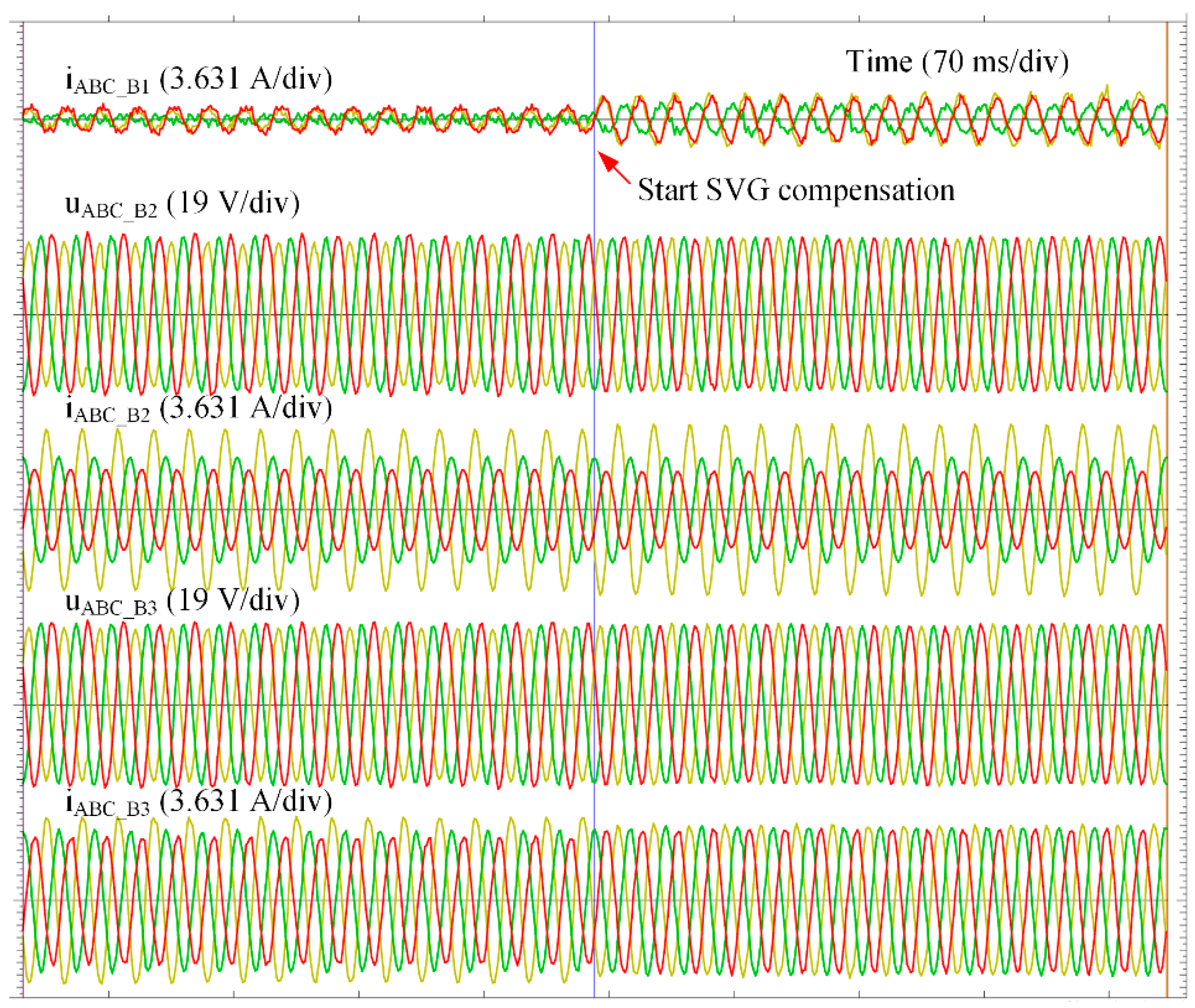
4.2. Compensating Unbalanced Load Testing
4.3. Compensating Short-Circuit Fault Testing
5. Low-Voltage Ride through Standard Testing of PV Inverter
5.1. Testing System
5.2. Results of LVRT Standard Testing
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Roscoe, A.J.; Mackay, A.; Burt, G.M.; McDonald, J.R. Architecture of a network-in-the-loop environment for characterizing AC power-system behavior. IEEE Trans. Ind. Electron. 2010, 57, 1245–1253. [Google Scholar] [CrossRef] [Green Version]
- Lauss, G.F.; Faruque, M.O.; Schoder, K.; Dufour, C.; Viehweider, A.; Langston, J. Characteristics and design of power hardware-in-the-loop simulations for electrical power systems. IEEE Trans. Ind. Electron. 2016, 63, 406–417. [Google Scholar] [CrossRef]
- Kotsampopoulos, P.C.; Lehfuss, F.; Lauss, G.F.; Bletterie, B.; Hatziargyriou, N.D. The limitations of digital simulation and the advantages of PHIL testing in studying distributed generation provision of ancillary services. IEEE Trans. Ind. Electron. 2015, 62, 5502–5515. [Google Scholar] [CrossRef]
- Hoke, A.; Chakraborty, S.; Basso, T. A power hardware-in-the-loop framework for advanced grid-interactive inverter testing. In Proceedings of the 2015 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–20 February 2015; pp. 1–5. [Google Scholar]
- Palmintier, B.; Lundstrom, B.; Chakraborty, S.; Williams, T.; Schneider, K.; Chassin, D. A power hardware-in-the-loop platform with remote distribution circuit cosimulation. IEEE Trans. Ind. Electron. 2015, 62, 2236–2245. [Google Scholar] [CrossRef]
- Steurer, M.; Edrington, C.S.; Sloderbeck, M.; Ren, W.; Langston, J. A megawatt-scale power hardware-in-the-loop simulation setup for motor drives. IEEE Trans. Ind. Electron. 2010, 57, 1254–1260. [Google Scholar] [CrossRef]
- Saito, K.; Akagi, H. A power hardware-in-the-loop (P-HIL) test bench using two modular multilevel DSCC converters for a synchronous motor drive. IEEE Trans. Ind. Appl. 2018. [Google Scholar] [CrossRef]
- Huerta, F.; Gruber, J.K.; Prodanovic, M.; Matatagui, P. Power-hardware-in-the-loop test beds: Evaluation tools for grid integration of distributed energy resources. IEEE Ind. Appl. Mag. 2016, 22, 18–26. [Google Scholar] [CrossRef]
- Hoke, A.F.; Nelson, A.; Chakraborty, S.; Bell, F.; McCarty, M. An islanding detection test platform for multi-inverter islands using power HIL. IEEE Trans. Ind. Electron. 2018, 65, 7944–7953. [Google Scholar] [CrossRef]
- Wang, J.; Song, Y.; Li, W.; Guo, J.; Monti, A. Development of a universal platform for hardware in-the-loop testing of microgrids. IEEE Trans. Ind. Inf. 2014, 10, 2154–2165. [Google Scholar] [CrossRef]
- Vijay, A.S.; Doolla, S.; Chandorkar, M.C. Real-time testing approaches for microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1356–1376. [Google Scholar] [CrossRef]
- Yang, L.; Wang, J.; Ma, Y.; Wang, J.; Zhang, X.; Tolbert, L.M.; Wang, F.F.; Tomsovic, K. Three-phase power converter-based real-time synchronous generator emulation. IEEE Trans. Power Electron. 2017, 32, 1651–1665. [Google Scholar] [CrossRef]
- Wang, J.; Yang, L.; Ma, Y.; Wang, J.; Tolbert, L.M.; Wang, F.F.; Tomsovic, K. Static and dynamic power system load emulation in a converter-based reconfigurable power grid emulator. IEEE Trans. Power Electron. 2016, 31, 3239–3251. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Y.; Yang, L.; Tolbert, L.M.; Wang, F. Power converter-based three-phase induction motor load emulator. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 3270–3274. [Google Scholar]
- Huerta, F.; Tello, R.L.; Prodanovic, M. Real-time power-hardware-in-the-loop implementation of variable-speed wind turbines. IEEE Trans. Ind. Electron. 2017, 64, 1893–1904. [Google Scholar] [CrossRef]
- Mai, X.H.; Kwak, S.; Jung, J.; Kim, K.A. Comprehensive electric-thermal photovoltaic modeling for power-hardware-in-the-loop simulation (PHILS) applications. IEEE Trans. Ind. Electron. 2017, 64, 6255–6264. [Google Scholar] [CrossRef]
- Seitl, C.; Messner, C.; Popp, H.; Kathan, J. Emulation of a high voltage home storage battery system using a power hardware-in-the-loop approach. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 6705–6710. [Google Scholar]
- Yang, L.; Ma, Y.; Wang, J.; Wang, J.; Zhang, X.; Tolbert, L.M.; Wang, F.; Tomsovic, K. Development of converter based reconfigurable power grid emulator. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Pittsburgh, PA, USA, 14–18 September 2014; pp. 3990–3997. [Google Scholar]
- Zhang, S.; Ma, Y.; Yang, L.; Wang, F.; Tolbert, L.M. Development of a hybrid emulation platform based on RTDS and reconfigurable power converter-based testbed. In Proceedings of the 31st Annual IEEE Applied Power Electronics Conference and Exposition, Long Beach, CA, USA, 20–24 March 2016; pp. 3121–3127. [Google Scholar]
- Ren, W.; Steurer, M.; Baldwin, T.L. Improve the stability and the accuracy of power hardware-in-the-loop simulation by selecting appropriate interface algorithms. IEEE Trans. Ind. Appl. 2008, 44, 1286–1294. [Google Scholar] [CrossRef]
- Goyal, S.; Ledwich, G.; Ghosh, A. Power network in loop: A paradigm for real-time simulation and hardware testing. IEEE Trans. Power Deliv. 2010, 25, 1083–1092. [Google Scholar] [CrossRef] [Green Version]
- Kotsampopoulos, P.C.; Kleftakis, V.A.; Hatziargyriou, N.D. Laboratory education of modern power systems using PHIL simulation. IEEE Trans. Power Syst. 2017, 32, 3992–4001. [Google Scholar] [CrossRef]
- Lundstrom, B.; Palmintier, B.; Rowe, D.; Ward, J.; Moore, T. Trans-oceanic remote power hardware-in-the-loop: Multi-site hardware, integrated controller, and electric network co-simulation. IET Gener. Transm. Distrib. 2017, 11, 4688–4701. [Google Scholar] [CrossRef]
- Kim, Y.; Wang, J. Power hardware-in-the-loop simulation study on frequency regulation through direct load control of thermal and electrical energy storage resources. IEEE Trans. Smart Grid 2018, 9, 2786–2796. [Google Scholar] [CrossRef]
- Maniatopoulos, M.; Lagos, D.; Kotsampopoulos, P.; Hatziargyriou, N. Combined control and power hardware in-the-loop simulation for testing smart grid control algorithms. IET Gener. Transm. Distrib. 2017, 11, 3009–3018. [Google Scholar] [CrossRef]
- Mao, C.; Leng, F.; Li, J.; Zhang, S.; Zhang, L.; Mo, R.; Wang, D.; Zeng, J.; Chen, X.; An, R.; et al. A 400-V/50-kVA digital-physical hybrid real-time simulation platform for power systems. IEEE Trans. Ind. Electron. 2018, 65, 3666–3676. [Google Scholar] [CrossRef]
- Zeng, J.; Leng, F.; Peng, B.; Li, J.; An, R.; Chen, X.; Mao, C.; Wang, D. A novel impedance compensation algorithm for improving the stability of digital-physical hybrid simulation. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 51–55. [Google Scholar]
- Zeng, J.; Li, J.; Leng, F.; Peng, B.; Chen, X.; Mao, C.; Wang, D. A DC component elimination control strategy for the interface system of digital-physical hybrid real-time simulation. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 515–520. [Google Scholar]
- Wang, A.; Sun, X.; Zhou, X.; Hu, W. Difference squared Hausdorff distance based medical image registration. In Proceedings of the 2011 23rd Chinese Control and Decision Conference, Mianyang, China, 23–25 May 2011; pp. 4270–4272. [Google Scholar]
- Taha, A.A.; Hanbury, A. An efficient algorithm for calculating the exact Hausdorff distance. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 2153–2163. [Google Scholar] [CrossRef] [PubMed]
- Mojallal, A.; Lotfifard, S. Enhancement of grid connected PV arrays fault ride through and post fault recovery performance. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Perpinias, I.I.; Papanikolaou, N.P.; Tatakis, E.C. Optimum design of low-voltage distributed photovoltaic systems oriented to enhanced fault ride through capability. IET Gener. Transm. Distrib. 2015, 9, 903–910. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resistance (Ω) | Reactance (Ω) | Impedance (Ω) | |
|---|---|---|---|
| Actual cable L1 | 1.58 | 1.049 | 1.897∠33.58° |
| Reactor XL | 0.2843 | 2.28 | 2.298∠82.89° |
| Simulated cable L1 (R + XL) | 3.8843 | 2.28 | 4.504∠30.41° |
| E_Stable (−0.1~−0.0114 s) | E_Fault (−0.0112~0.502 s) | E_All (−0.1~0.6 s) | |
|---|---|---|---|
| Phase A | 3.28% | 4.51% | 4.51% |
| Phase B | 2.50% | 8.76% | 8.76% |
| Phase C | 2.81% | 4.19% | 4.19% |
| E_Stable (−0.08~−0.0002 s) | E_Fault (0~0.0646 s) | E_All (−0.08~0.16 s) | |
|---|---|---|---|
| Phase A | 3.50% | 7.03% | 7.03% |
| Phase B | 3.23% | 4.11% | 23.12% |
| Phase C | 3.27% | 8.01% | 8.01% |
| Component | Parameter | Value |
|---|---|---|
| SVG | Rated voltage | 400 V |
| Rated capacity | 50 kvar | |
| Line-simulating reactor (31XL) | Impedance | 8.608∠50.45° Ω |
| Cable-simulating reactor (34XL) | Impedance | 1.14∠82.9° Ω |
| Load (91~94RLD, identical) | Resistive load (R) | 70 Ω |
| Impedance load (L) | 152.315∠23.2° Ω | |
| Dynamic motor (D) | 5 kVA | |
| Unbalanced load (Resistive) | Phase A | 5 Ω |
| Phase B | 8 Ω | |
| Phase C | 11 Ω |
| No. | Loads | Input Phase Voltage (V) | Output Reactive Power (kvar) | SVG State |
|---|---|---|---|---|
| 1 | 91-92RLD | 209 | 5.61 | Normal |
| 2 | 91-93RLD | 205 | 6.95 | Normal |
| 3 | 91-94RLD | 205 | 7.80 | Normal |
| 4 | 91-94RLD | 192 | 6.96 | Normal |
| 5 | 91-94RLD | 174 | 5.98 | Normal |
| 6 | 91-94RLD | 160 | 5.13 | Normal |
| 7 | 91-94RLD | 152 | 4.62 | Normal |
| 8 | 91-94RLD | 138.5 | 3.88 | Normal |
| 9 | 91-94RLD | 136 | 3.75 | Normal |
| 10 | 91-94RLD | 134 | 0.325 | Warning |
| SVG | VA_RMS (V) | VB_RMS (V) | VC_RMS (V) | IA_RMS (A) | IB_RMS (A) | IC_RMS (A) |
|---|---|---|---|---|---|---|
| Disabled | 162 | 177.12 | 187.36 | 36.06 | 27.96 | 22.66 |
| Enabled | 174.4 | 174.4 | 175.8 | 30.36 | 30.32 | 29.42 |
| Magnitude (p.u.) | Phase | Duration Time (s) | Remain Connected | Pass Test |
|---|---|---|---|---|
| 80% | Three phases | 1.55 | Yes | Yes |
| Two phases | 1.55 | Yes | Yes | |
| Single phase | 1.55 | Yes | Yes | |
| 50% | Three phases | 1.1 | Yes | Yes |
| Two phases | 1.1 | Yes | Yes | |
| Single phase | 1.1 | Yes | Yes | |
| 20% | Three phases | 0.625 | Yes | Yes |
| Two phases | 0.625 | Yes | Yes | |
| Single phase | 0.625 | Yes | Yes |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leng, F.; Mao, C.; Wang, D.; An, R.; Zhang, Y.; Zhao, Y.; Cai, L.; Tian, J. Applications of Digital-Physical Hybrid Real-Time Simulation Platform in Power Systems. Energies 2018, 11, 2682. https://doi.org/10.3390/en11102682
Leng F, Mao C, Wang D, An R, Zhang Y, Zhao Y, Cai L, Tian J. Applications of Digital-Physical Hybrid Real-Time Simulation Platform in Power Systems. Energies. 2018; 11(10):2682. https://doi.org/10.3390/en11102682
Chicago/Turabian StyleLeng, Feng, Chengxiong Mao, Dan Wang, Ranran An, Yuan Zhang, Yanjun Zhao, Linglong Cai, and Jie Tian. 2018. "Applications of Digital-Physical Hybrid Real-Time Simulation Platform in Power Systems" Energies 11, no. 10: 2682. https://doi.org/10.3390/en11102682