The Optimization Design of Short-Term High-Overload Permanent Magnet Motors Considering the Nonlinear Saturation



Abstract
:1. Introduction
2. Design Method of the Short-Term High Overload Motor
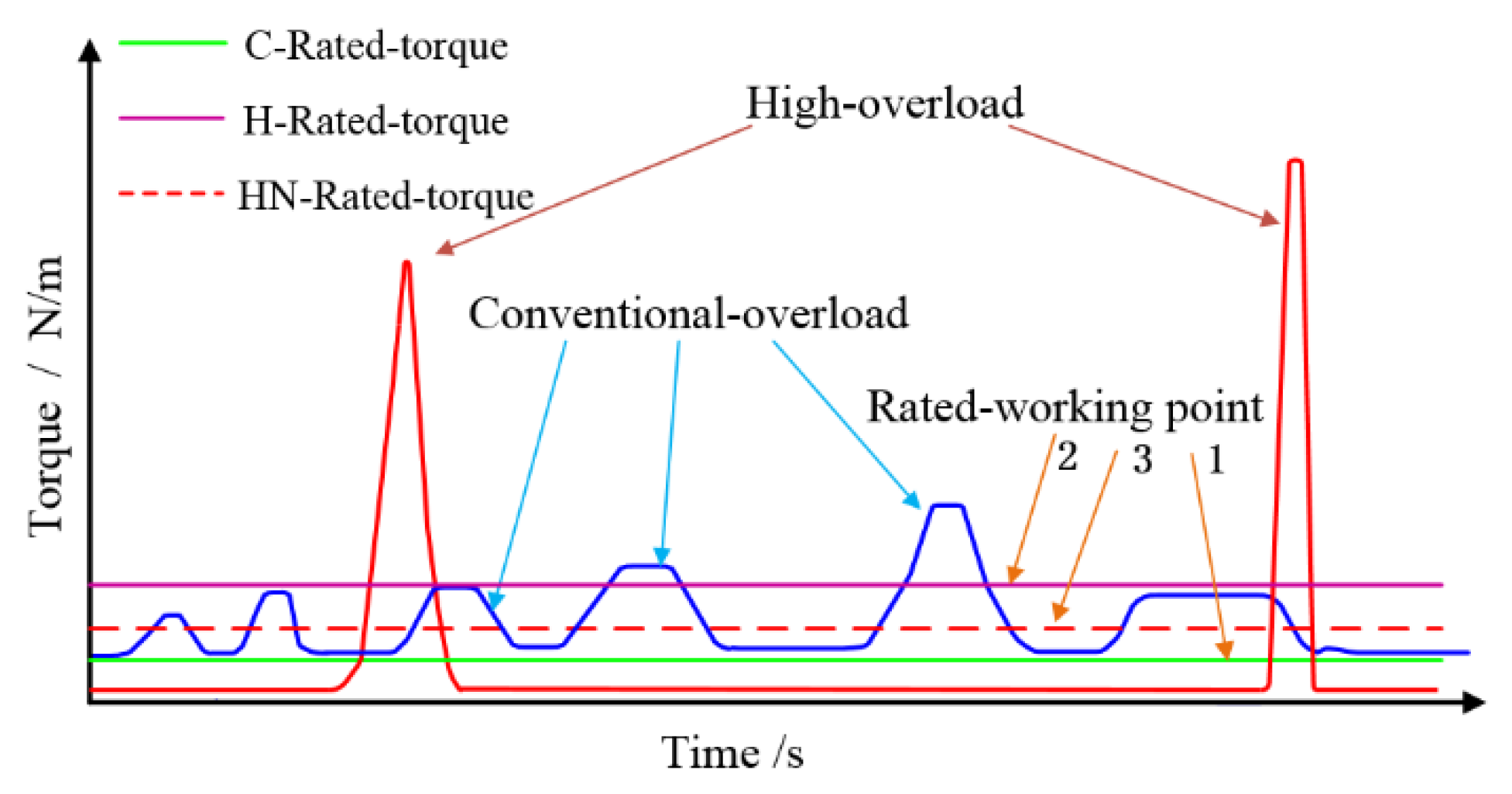
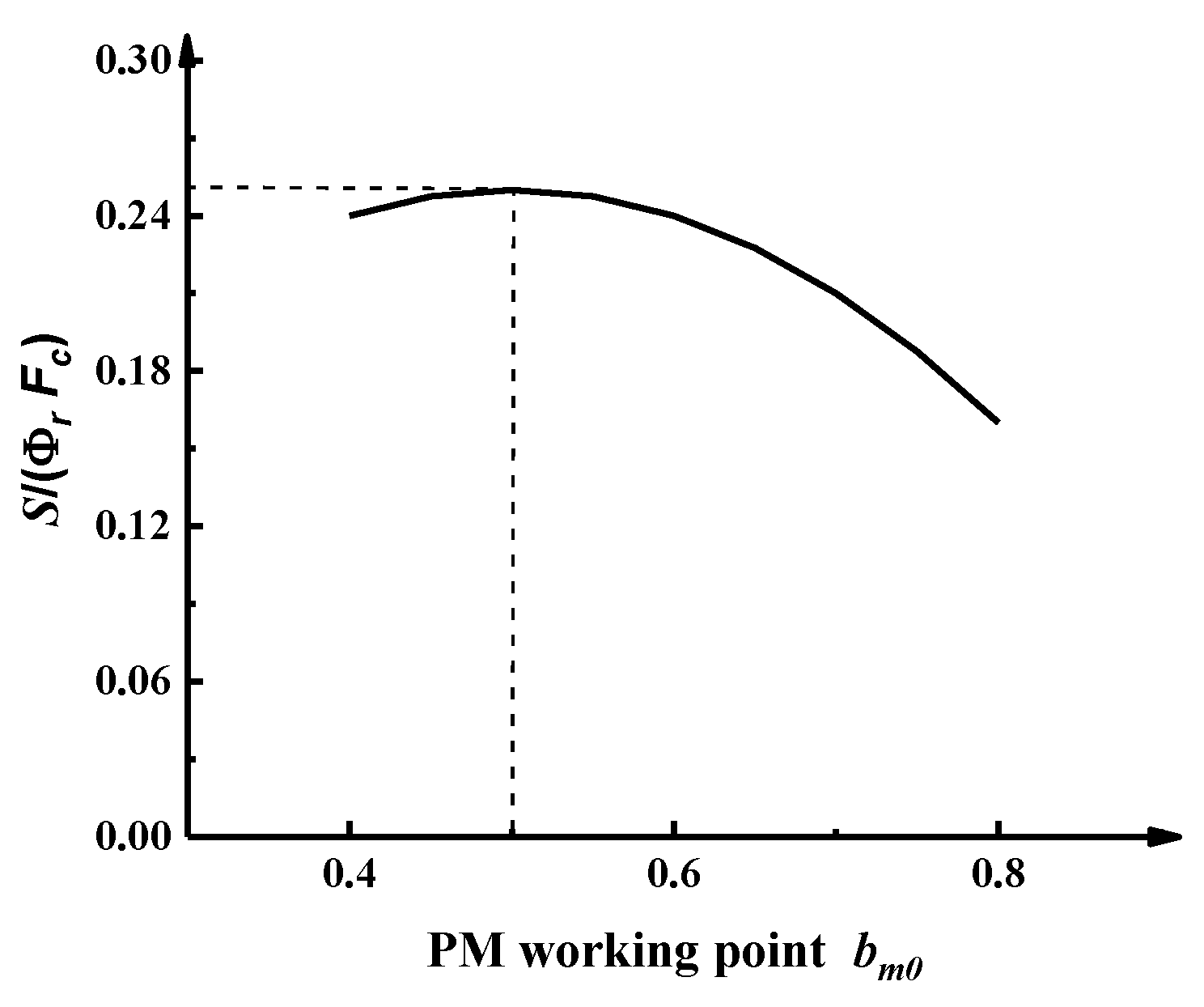
2.1. The Purpose of Rated Operating Point Optimization
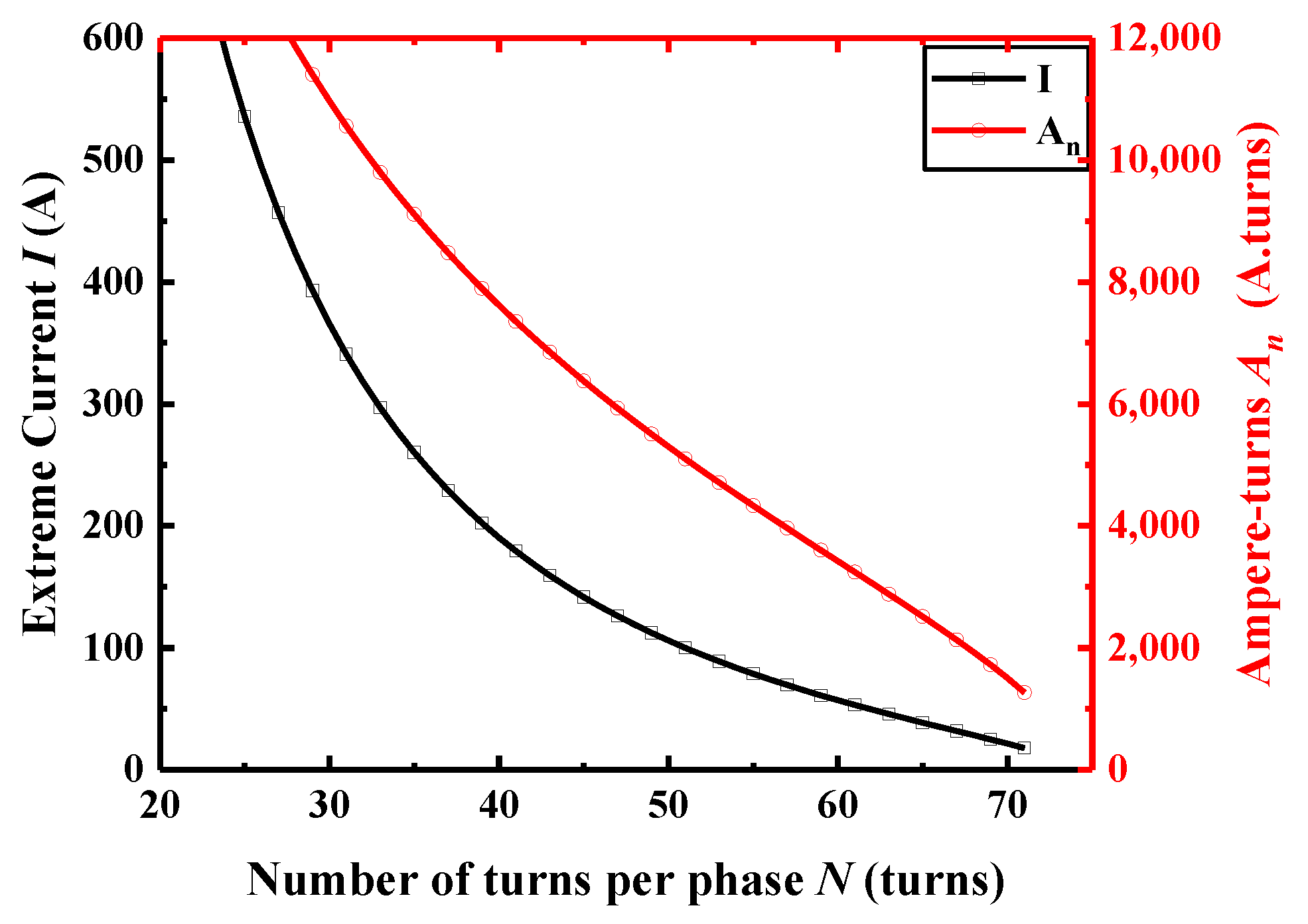
2.2. Electrical Load
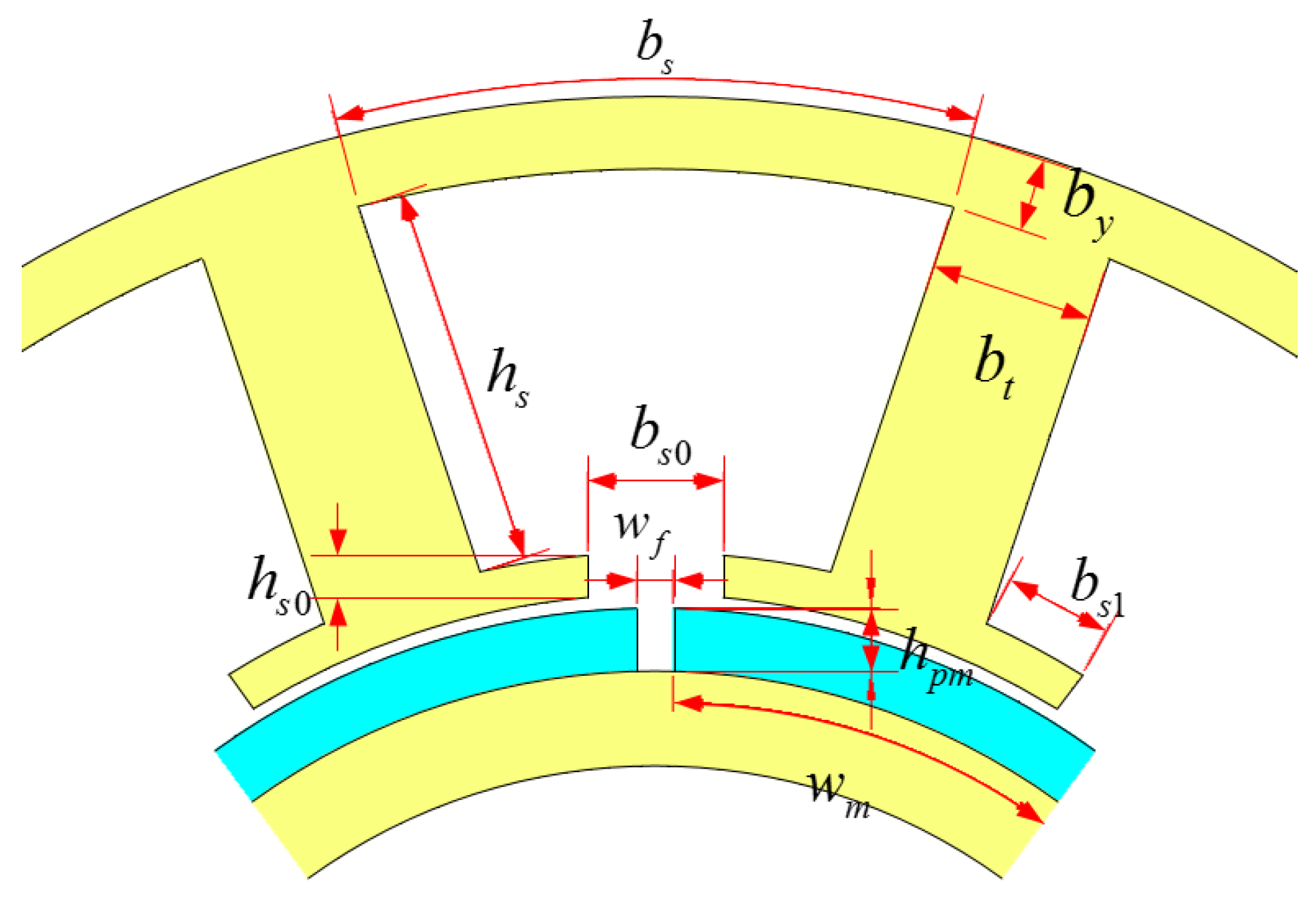
2.3. Magnetic Load
3. Consideration on the Nonlinear Saturation Effect
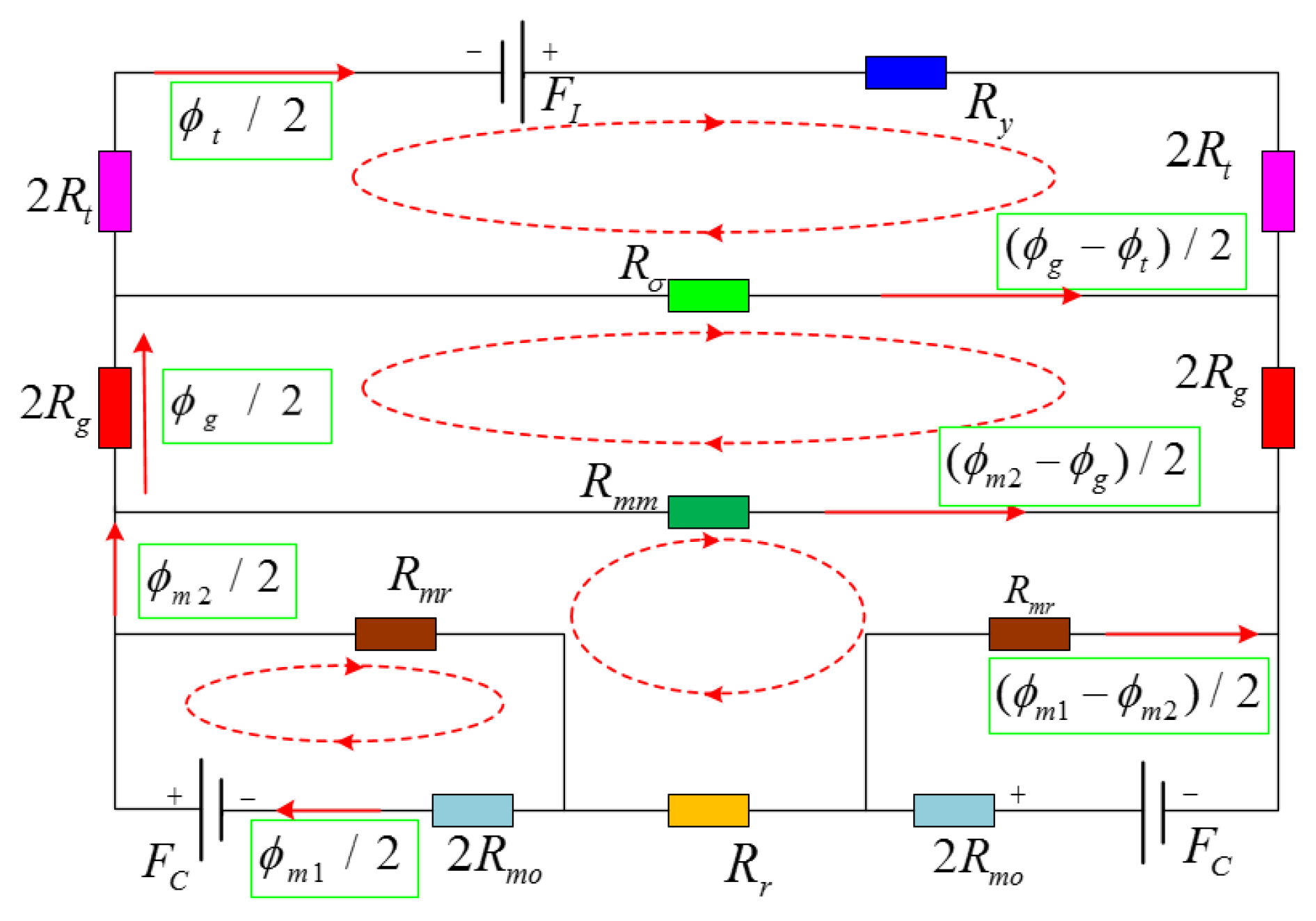
3.1. Magnetic Reluctance Equivalent Network Model
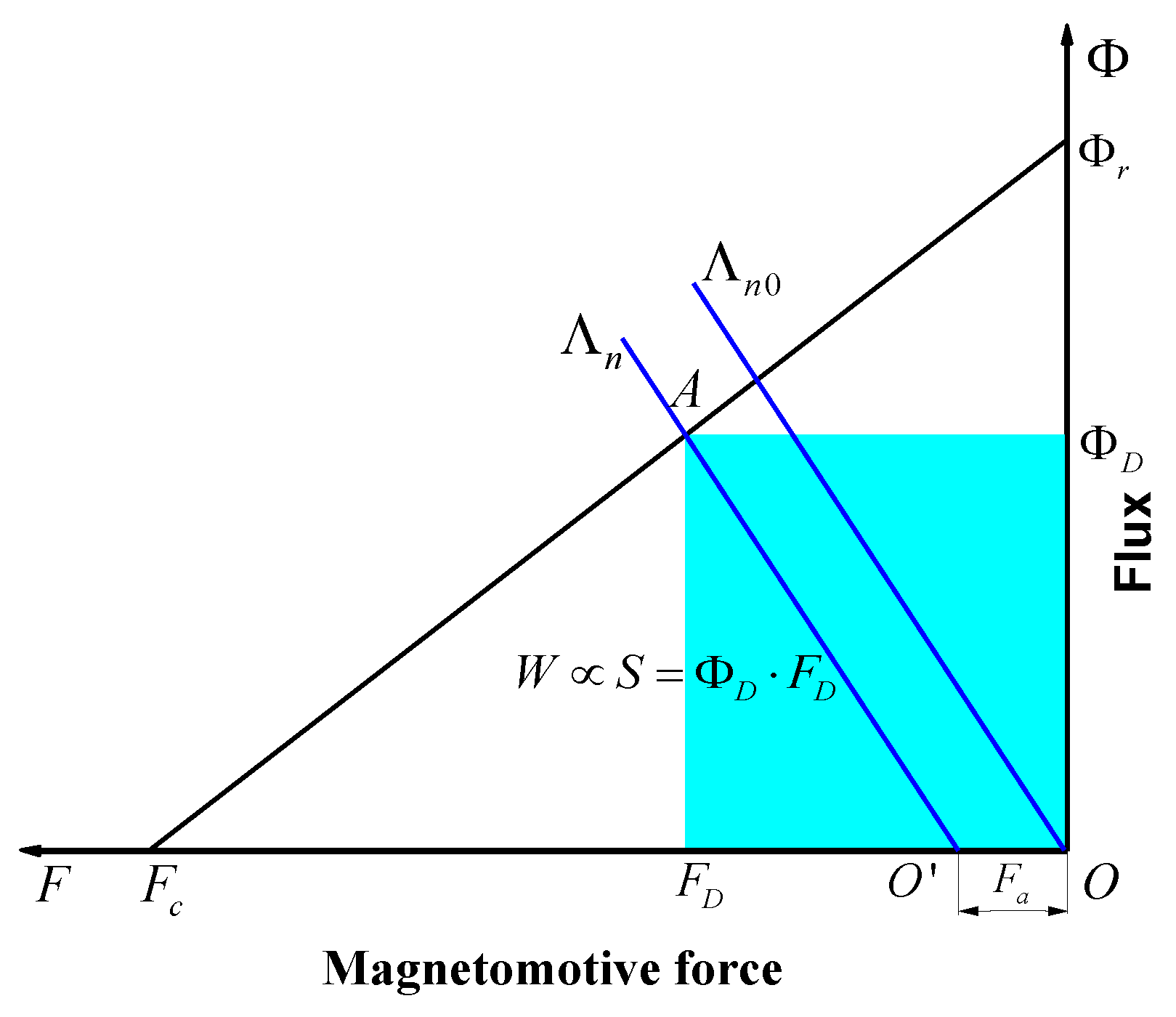
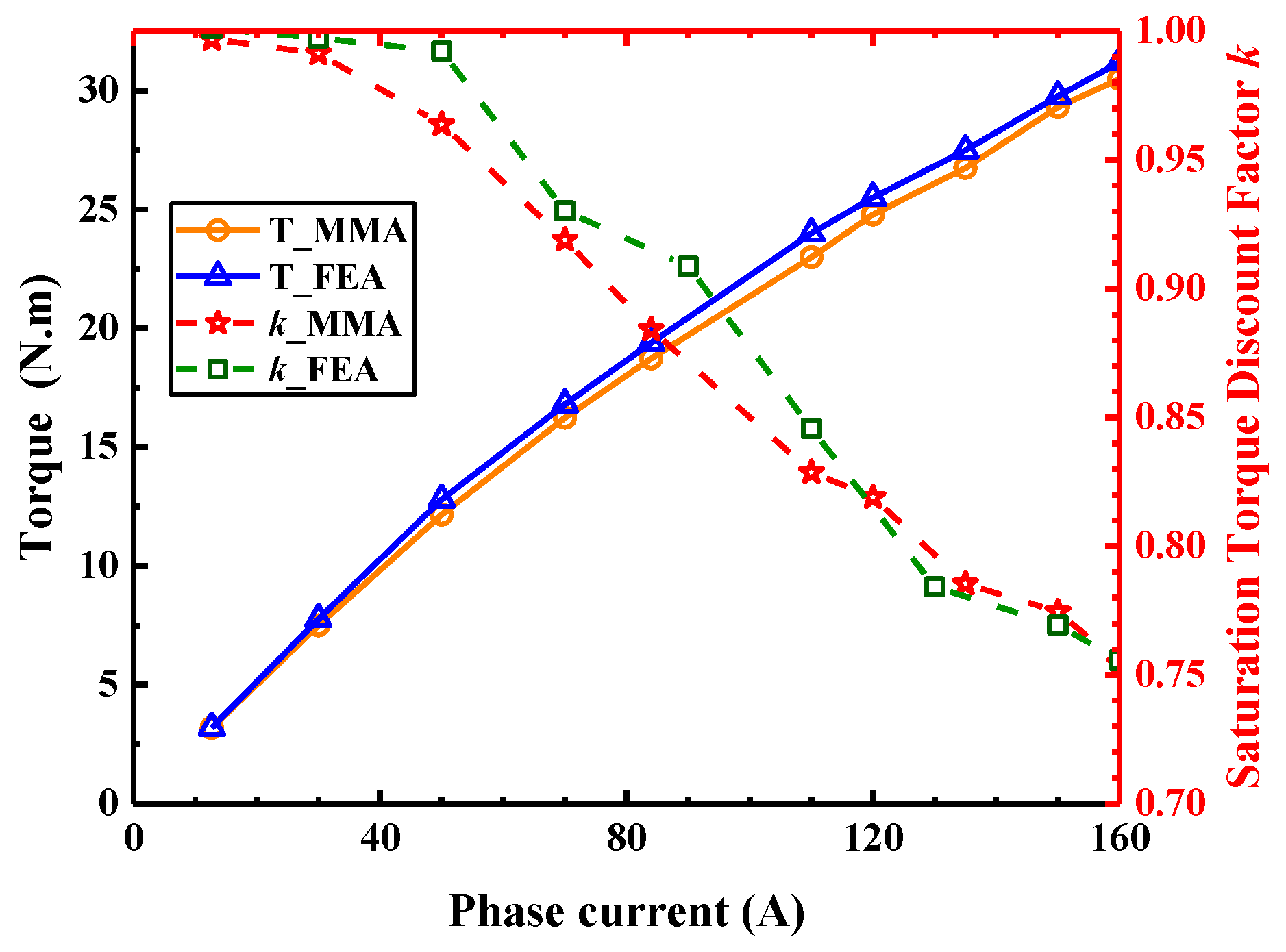
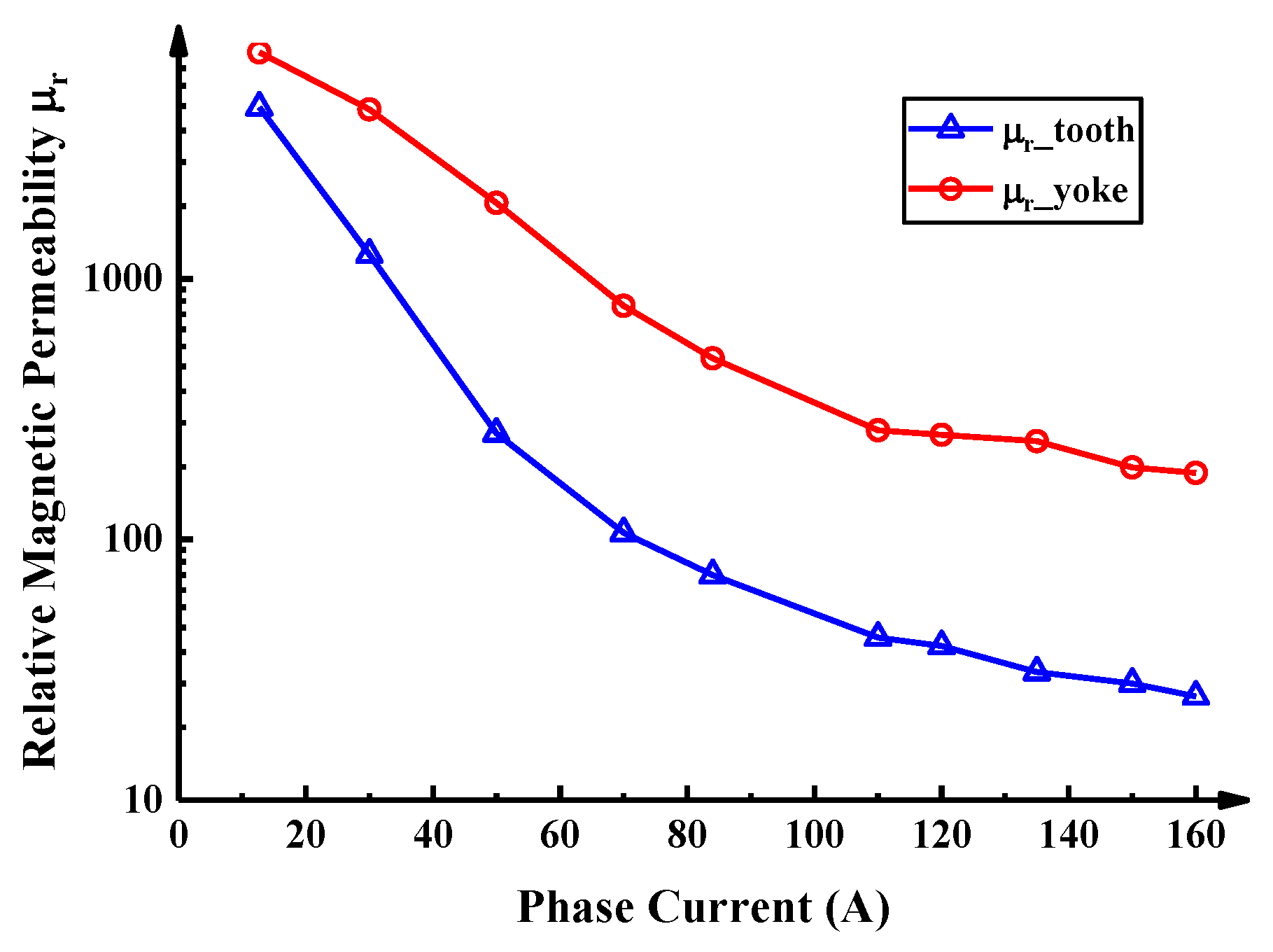
3.2. Core Saturation Quantification
4. Thermal Performance Analysis
4.1. Thermal Model
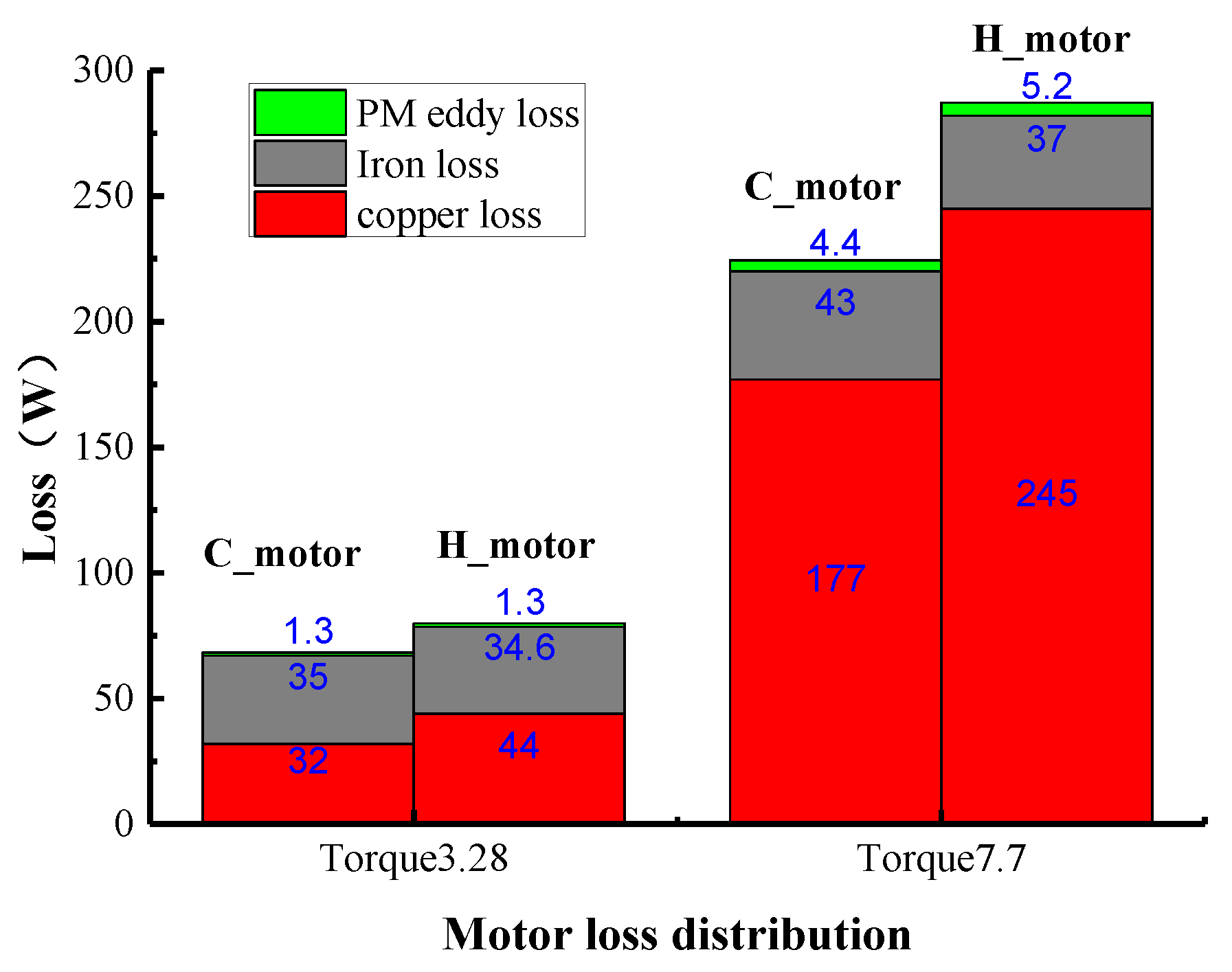
4.2. Iron and Copper
5. Simulation Analysis
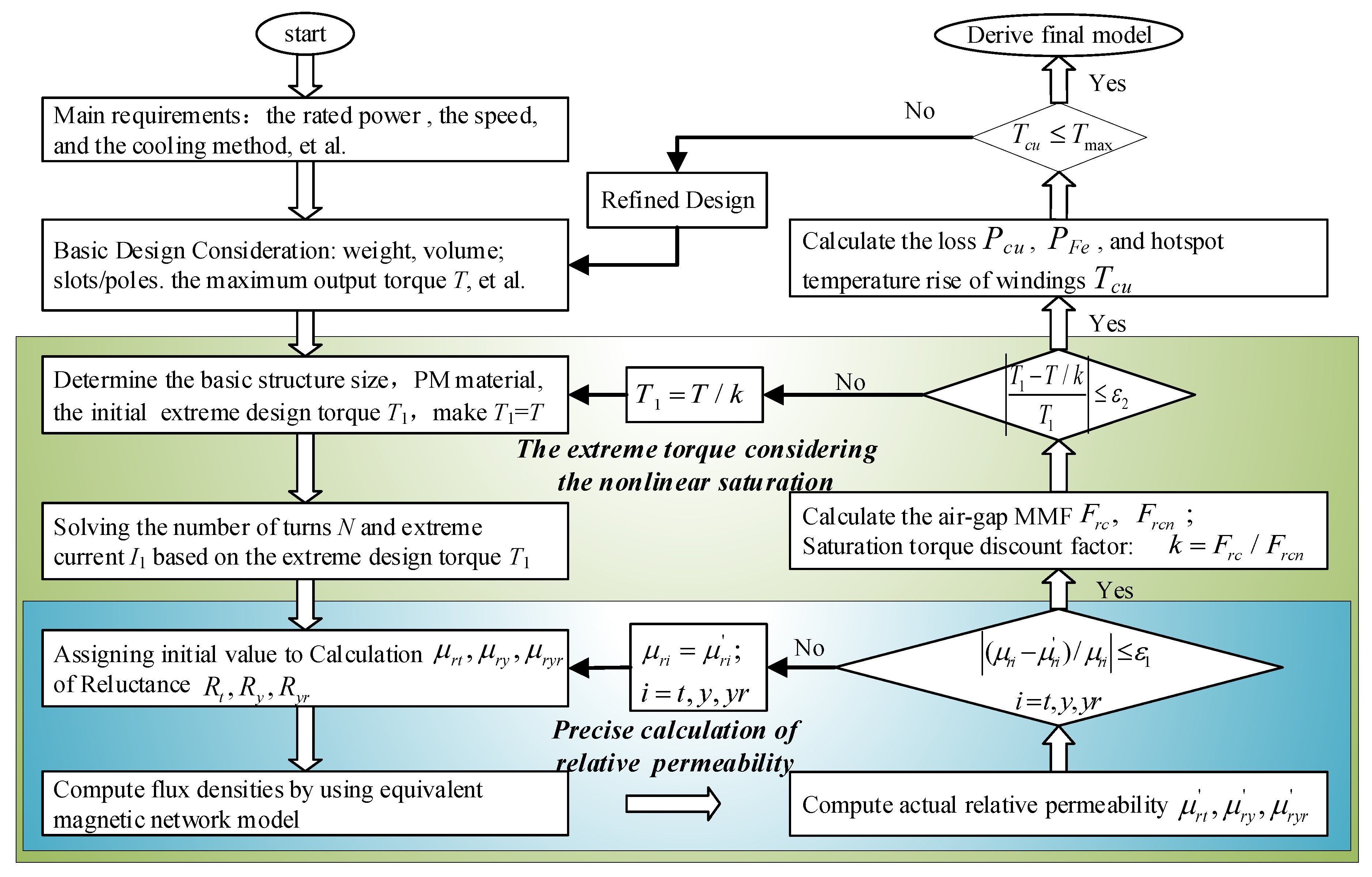
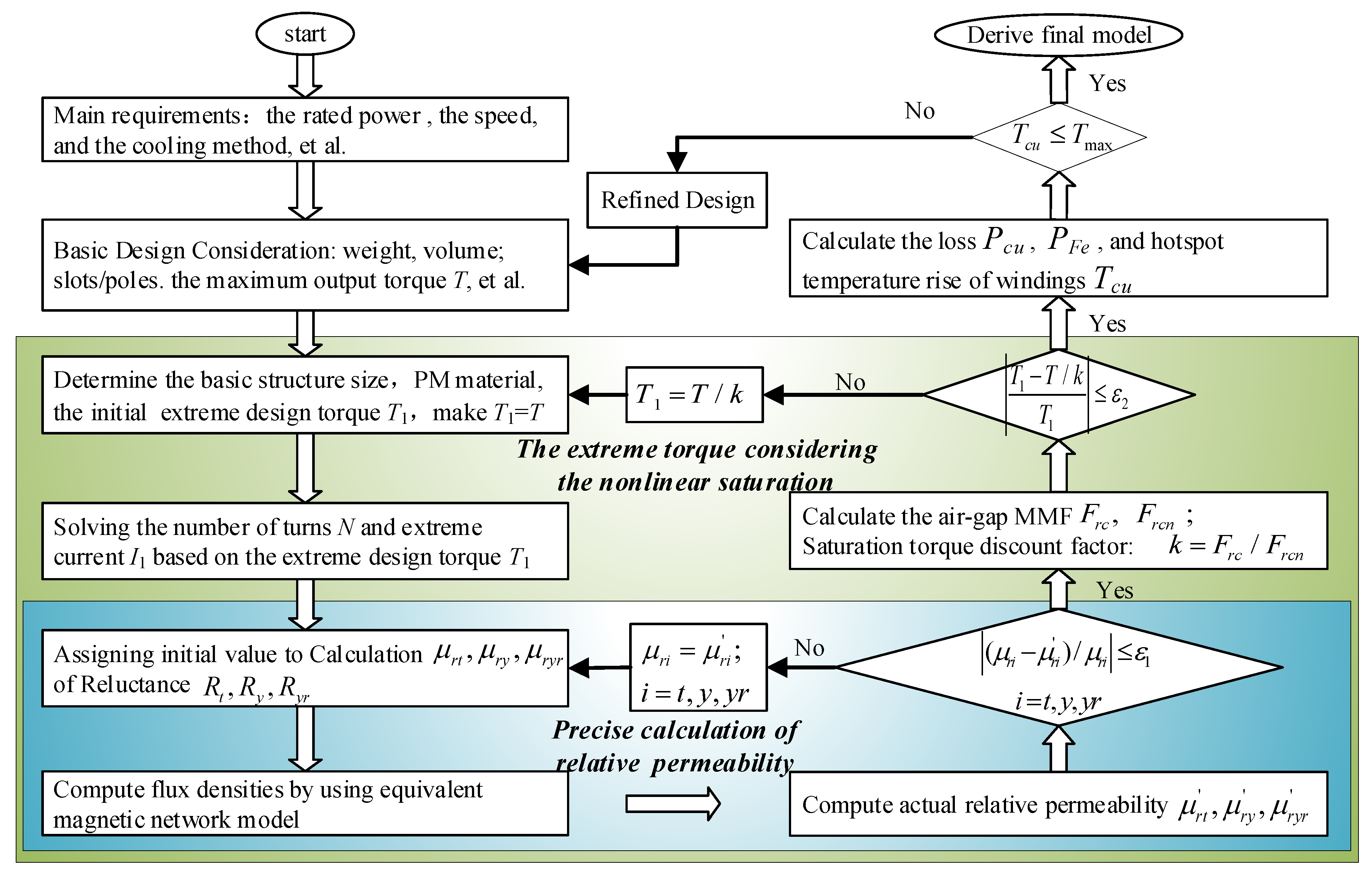
5.1. Design Procedure
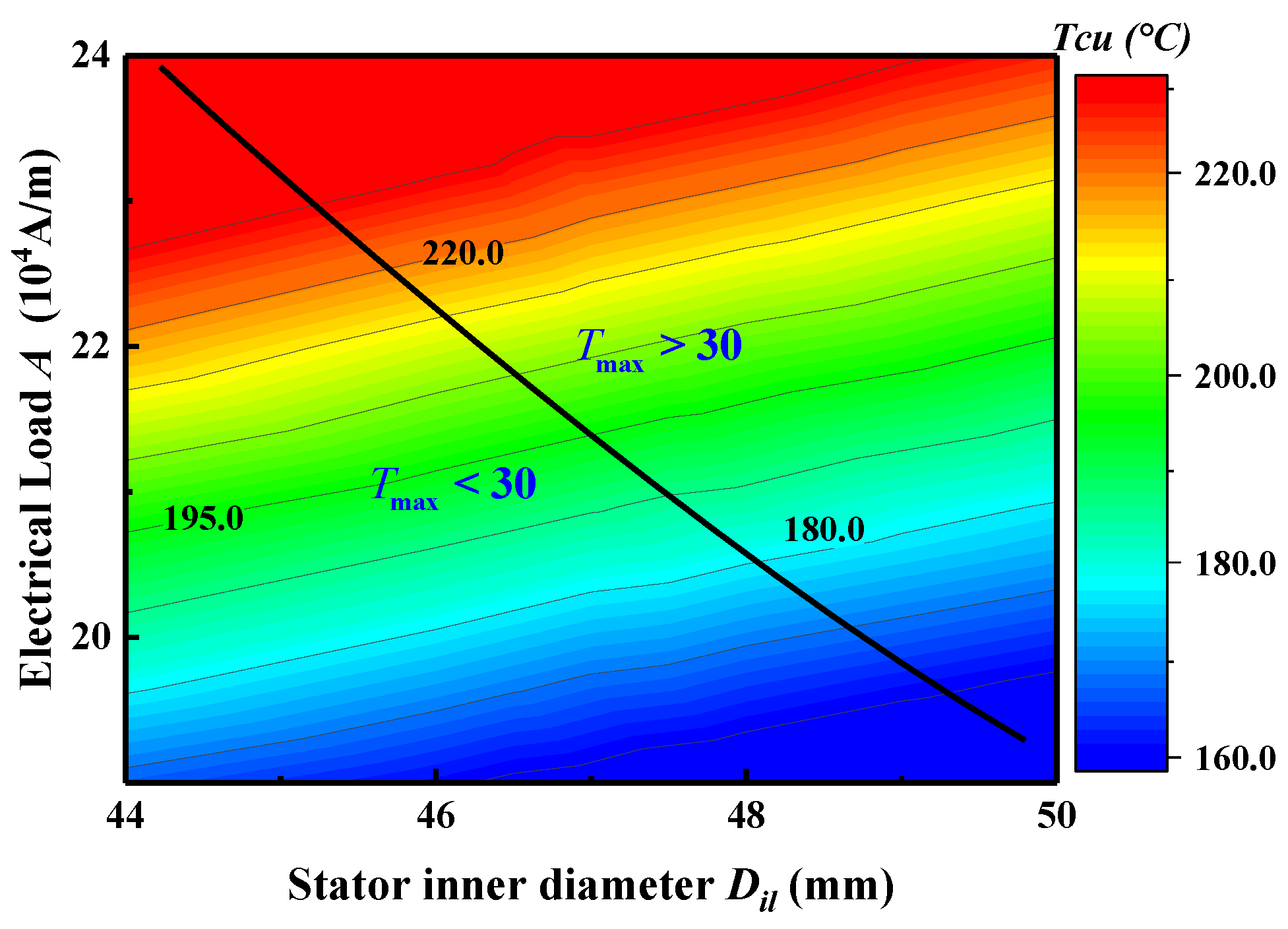
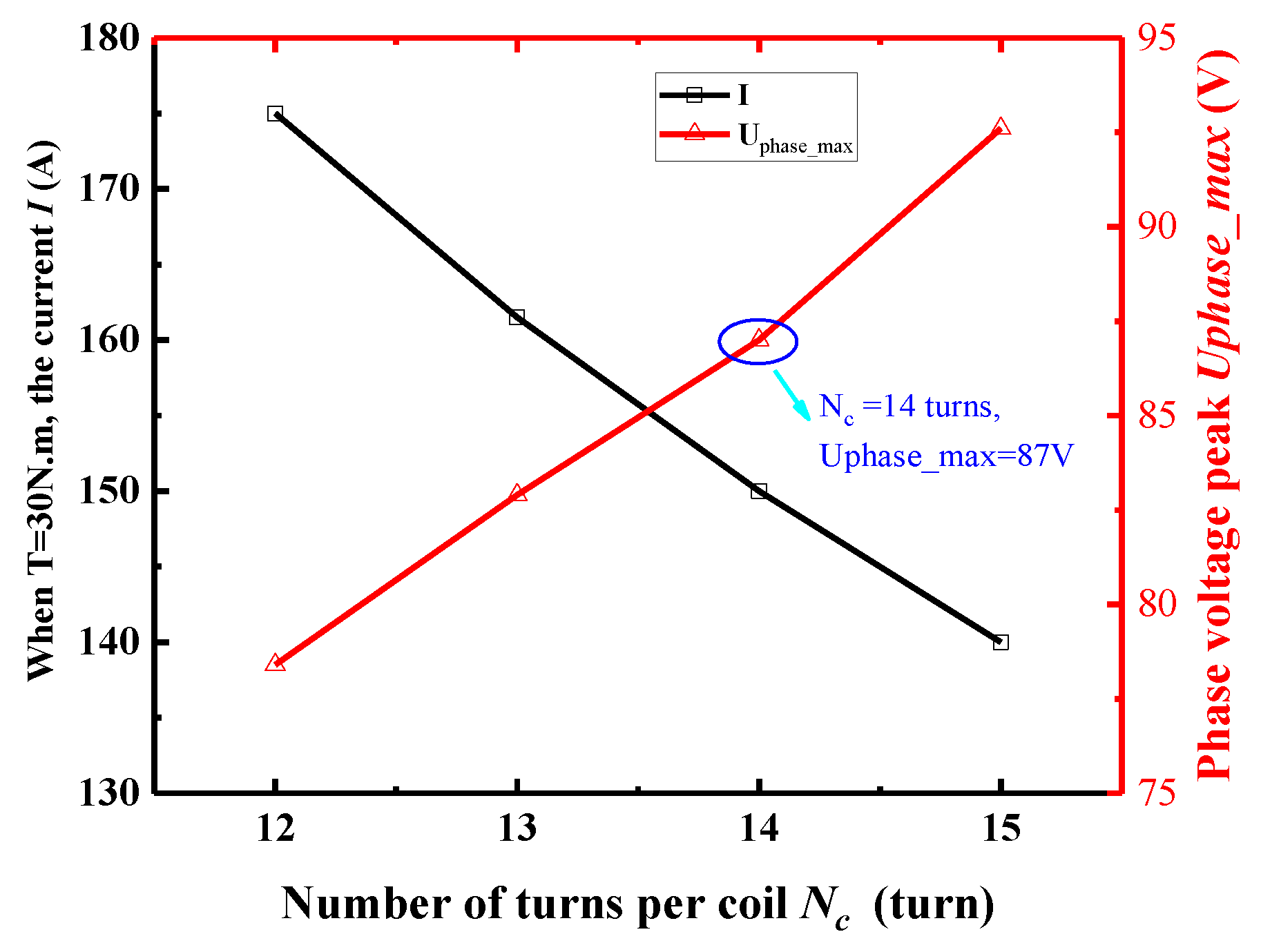
5.2. Key Parameter Optimization
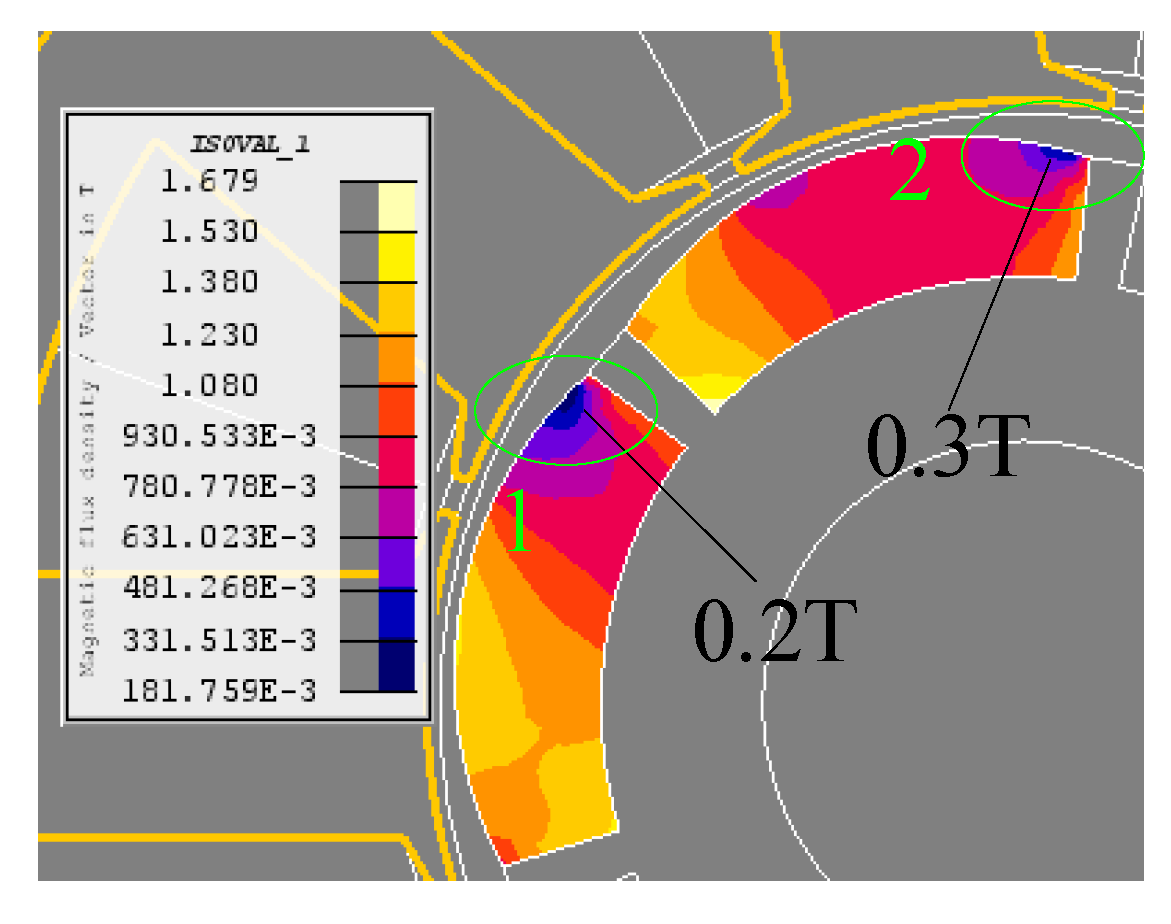
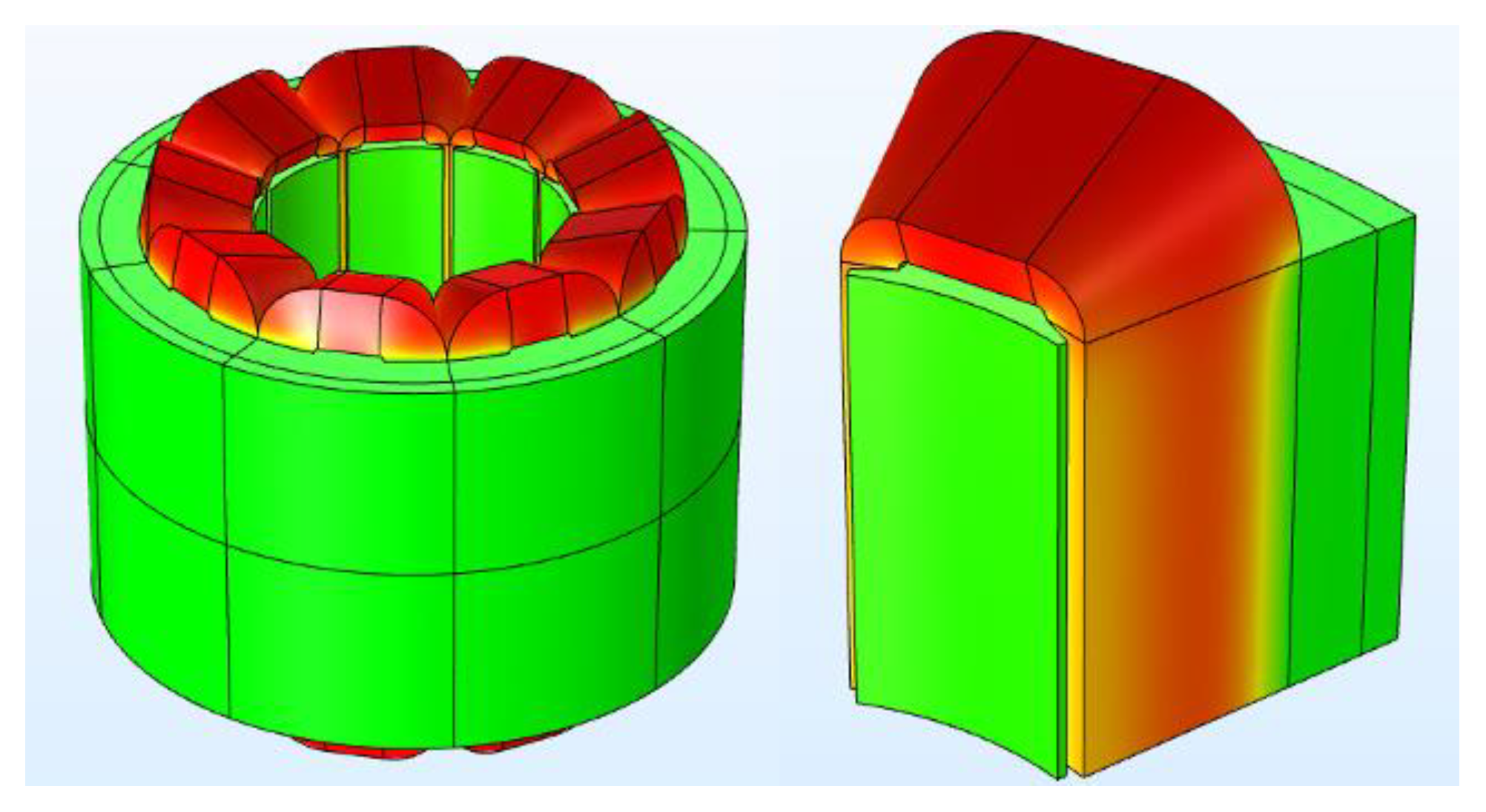
5.3. Electromagnetic Analysis
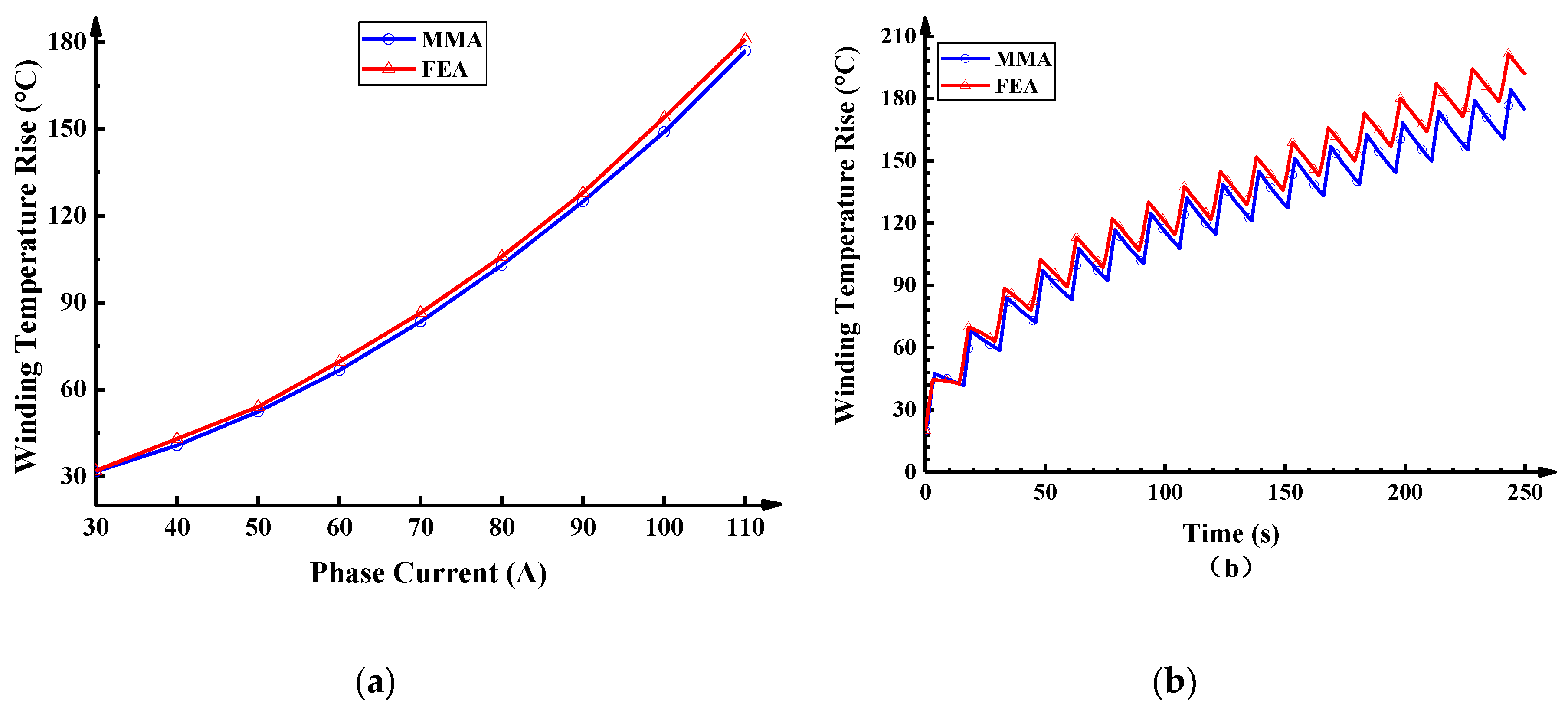
5.4. Thermal Analysis
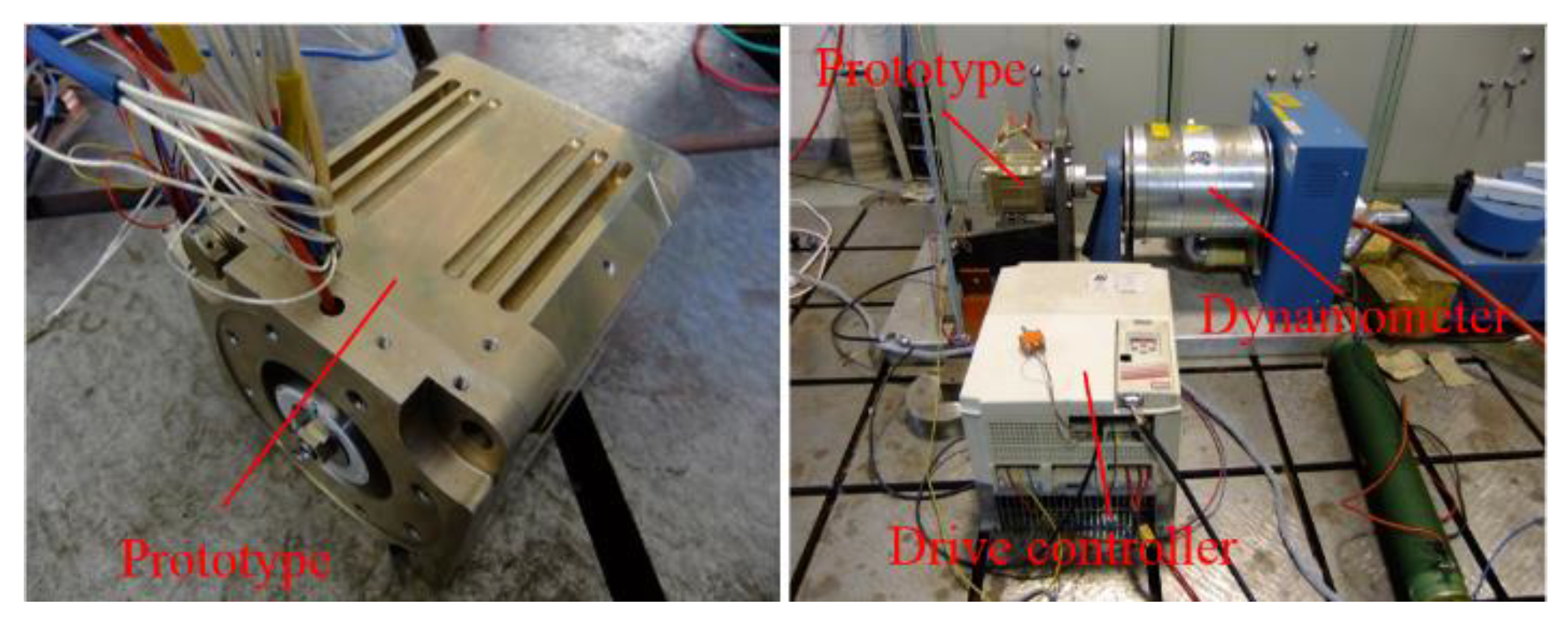
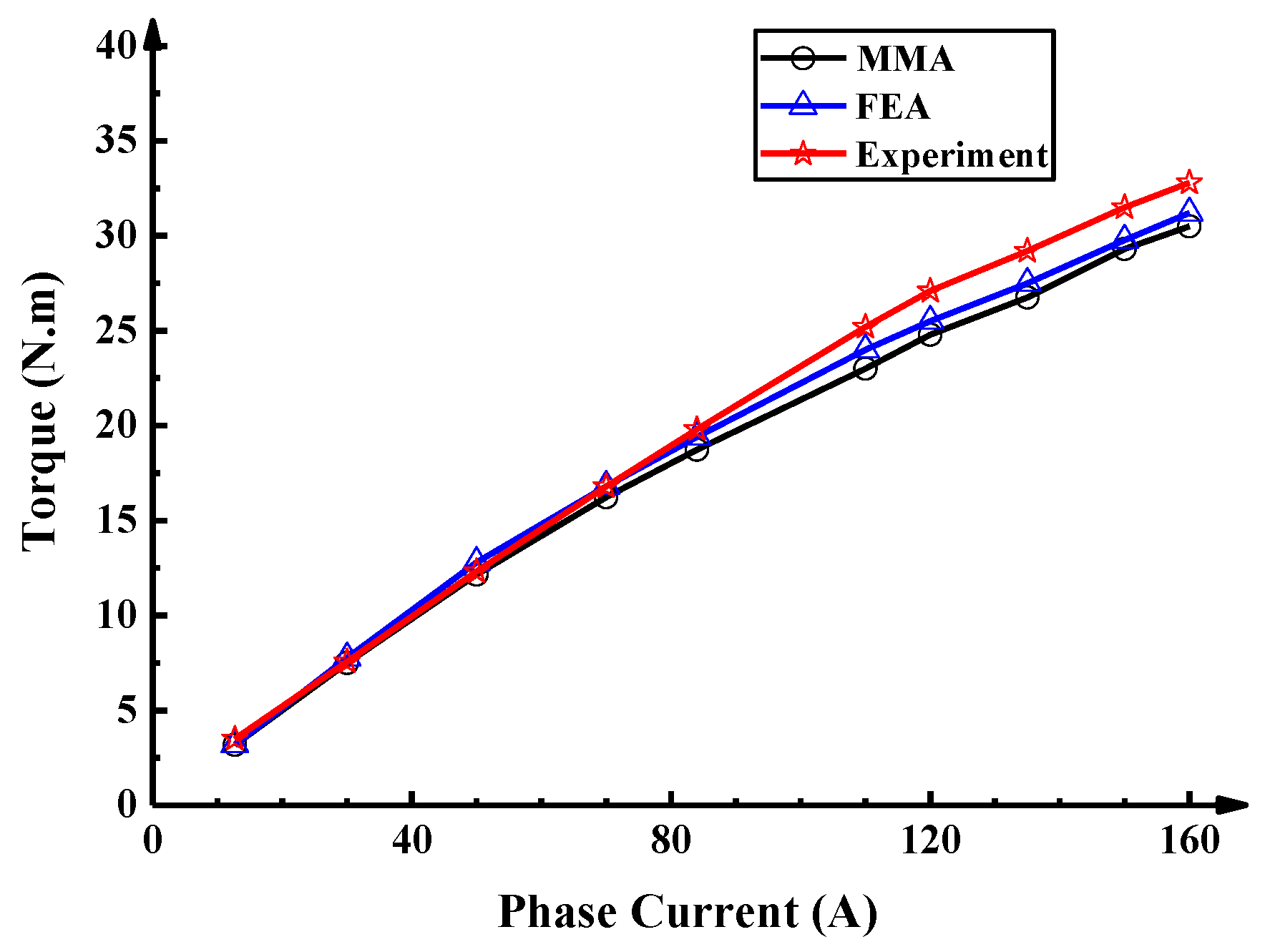
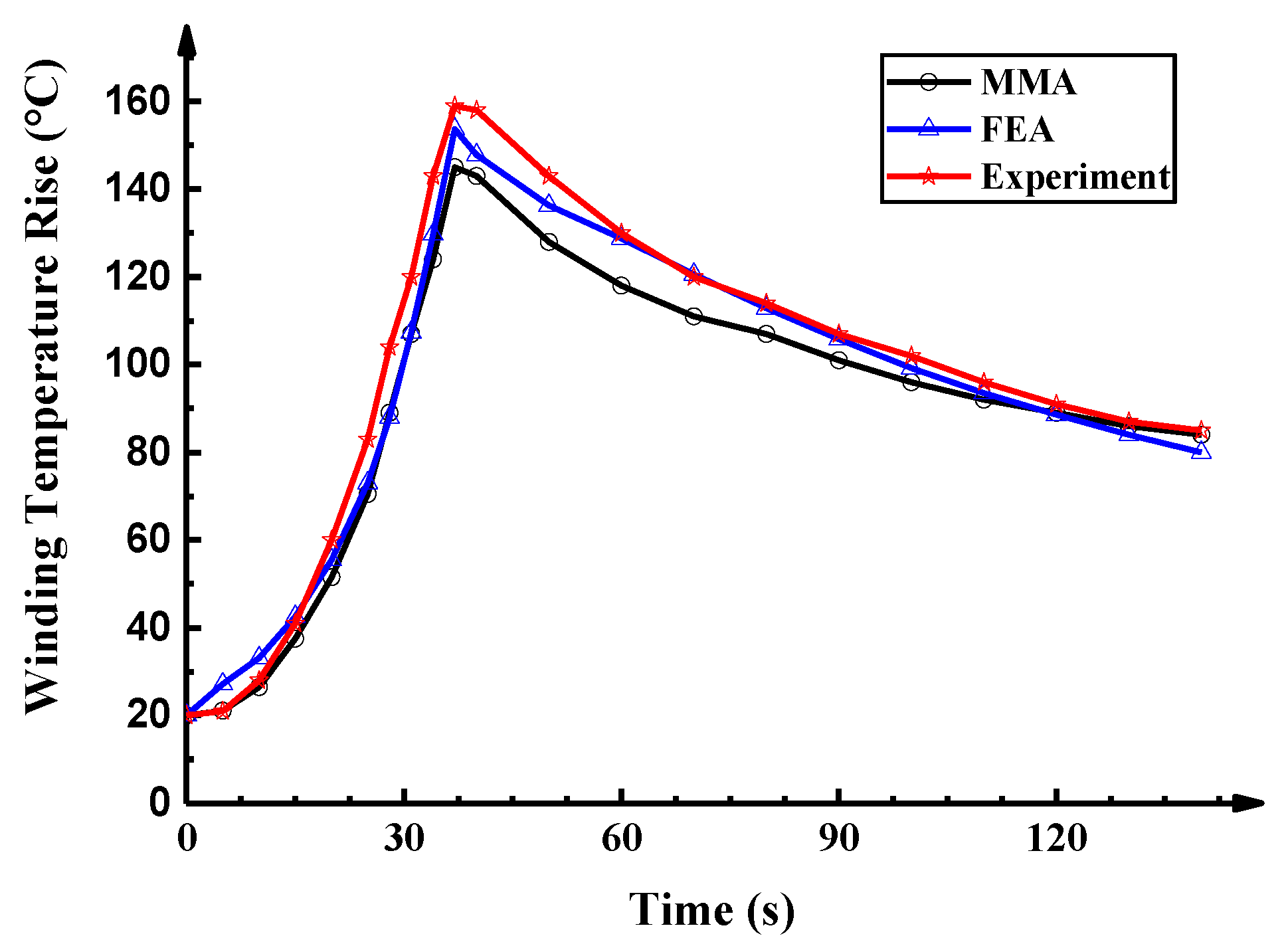
6. Experimental Validation
6.1. Torque Validation
6.2. Temperature Validation
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tessarolo, A. A Quadratic-Programming Approach to the Design Optimization of Fractional-Slot Concentrated Windings for Surface Permanent-Magnet Machines. IEEE Trans. Energy Convers. 2018, 33, 442–452. [Google Scholar] [CrossRef]
- Fan, T.; Li, Q.; Wen, X. Development of a High Power Density Motor Made of Amorphous Alloy Cores. IEEE Trans. Ind. Electron. 2014, 61, 4510–4518. [Google Scholar] [CrossRef]
- Boglietti, A.; Cossale, M.; Vaschetto, S.; Dutra, T. Winding Thermal Model for Short-Time Transient: Experimental Validation in Operative Conditions. IEEE Trans. Ind. Appl. 2018, 54, 1312–1319. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, Y.; Shen, Y. Influence of Small Teeth on Vibration for Dual-Redundancy Permanent Magnet Synchronous Motor. Energies 2018, 11, 2462. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, X.; Shen, Y. On-Line Detection of Coil Inter-Turn Short Circuit Faults in Dual-Redundancy Permanent Magnet Synchronous Motors. Energies 2018, 5, 662. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, W.; Li, B.; Liu, X.; Gao, C.; Gu, Z. Investigation of Electromagnetic, Thermal and Mechanical Characteristics of a Five-Phase Dual-Rotor Permanent-Magnet Synchronous Motor. Energies, 2015, 8, 9688–9718. [Google Scholar] [CrossRef] [Green Version]
- Cao, Z.; Li, W.L.; Li, J.; Zhang, X.; Li, D.; Zhang, M. Research on the Temperature Field of High-Voltage High Power Line Start Permanent Magnet Synchronous Machines with Different Rotor Cage Structure. Energies 2017, 10, 1829. [Google Scholar] [CrossRef]
- Xiao-Hai, L.; Zhu, L.; Ji-Min, Z.; Jiang, S.Z. Research on special low-speed, high-torque permanent magnet synchronous motor for screw pump. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 1858–1862. [Google Scholar]
- Huang, X.Z.; Liu, J.X.; Zhang, C.M.; Li, L.Y. Calculation and Experimental Study on Temperature Rise of a High Overload Tubular Permanent Magnet Linear Motor. IEEE Trans. Plasma Sci. 2013, 41, 1182–1187. [Google Scholar] [CrossRef]
- Kim, M.J.; Cho, S.Y.; Lee, K.D.; Lee, J.J.; Han, J.H.; Jeong, T.C.; Kim, W.H.; Koo, D.H.; Lee, J. Torque Density Elevation in Concentrated Winding Interior PM Synchronous Motor with Minimized Magnet Volume. IEEE Trans. Magn. 2013, 49, 3334–3337. [Google Scholar] [CrossRef]
- Qiu, H.; Yu, W.; Tang, B.; Mu, Y.; Li, W.; Yang, C. Study on the Influence of Different Rotor Structures on the Axial-Radial Flux Type Synchronous Machine. IEEE Trans. Ind. Electron. 2018, 65, 5406–5413. [Google Scholar] [CrossRef]
- Jun, H.W.; Lee, J.W.; Yoon, G.H.; Lee, J. Optimal Design of the PMSM Retaining Plate With 3-D Barrier Structure and Eddy-Current Loss-Reduction Effect. Trans. Ind. Electron. 2018, 65, 1808–1818. [Google Scholar] [CrossRef]
- Wang, J.; Yuan, X.; Atallah, K. Design Optimization of a Surface-Mounted Permanent-Magnet Motor with Concentrated Windings for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2013, 62, 1053–1064. [Google Scholar] [CrossRef]
- Min, S.G.; Bramerdorfer, G.; Sarlioglu, B. Analytical Modeling and Optimization for Electromagnetic Performances of Fractional-Slot PM Brushless Machines. IEEE Trans. Ind. Electron. 2018, 65, 4017–4027. [Google Scholar] [CrossRef]
- Chung, S.U.; Kim, J.M.; Koo, D.H.; Woo, B.C.; Hong, D.K.; Lee, J.Y. Fractional Slot Concentrated Winding Permanent Magnet Synchronous Machine with Consequent Pole Rotor for Low Speed Direct Drive. IEEE Trans. Magn. 2012, 48, 2965–2968. [Google Scholar] [CrossRef]
- Ahsanullah, K.; Dutta, R.; Rahman, M.F. Analysis of Low-Speed IPMMs With Distributed and Fractional Slot Concentrated Windings for Wind Energy Applications. IEEE Trans. Magn. 2017, 53, 1–10. [Google Scholar] [CrossRef]
- Wang, K.; Gu, Z.Y.; Zhu, Z.Q.; Wu, Z.Z. Optimum Injected Harmonics into Magnet Shape in Multiphase Surface-Mounted PM Machine for Maximum Output Torque. IEEE Trans. Ind. Electron. 2017, 64, 4434–4443. [Google Scholar] [CrossRef]
- Scuiller, F.; Zahr, H.; Semail, E. Maximum Reachable Torque, Power and Speed for Five-Phase SPM Machine with Low Armature Reaction. IEEE Trans. Energy Convers. 2016, 31, 959–968. [Google Scholar] [CrossRef]
- Arumugam, P.; Amankwah, E.; Walker, A.; Gerada, C. Design Optimization of a Short-Term Duty Electrical Machine for Extreme Environment. IEEE Trans. Ind. Electron. 2017, 64, 9784–9794. [Google Scholar] [CrossRef] [Green Version]
- Fang, H.; Wang, D. A Novel Design Method of Permanent Magnet Synchronous Generator from Perspective of Permanent Magnet Material Saving. IEEE Trans. Energy Convers. 2017, 32, 48–54. [Google Scholar] [CrossRef]
- Boglietti, A.; Carpaneto, E.; Cossale, M.; Vaschetto, S. Stator-Winding Thermal Models for Short-Time Thermal Transients: Definition and Validation. IEEE Trans. Ind. Electron. 2016, 63, 2713–2721. [Google Scholar] [CrossRef]
- Buyukdegirmenci, V.T.; Krein, P.T. Induction Machine Characterization for Short-Term or Momentary Stall Torque. IEEE Trans. Ind. Appl. 2015, 51, 2237–2245. [Google Scholar] [CrossRef]
- Chen, X.; Wang, J.; Sen, B.; Lazari, P.; Sun, T. A High-Fidelity and Computationally Efficient Model for Interior Permanent-Magnet Machines Considering the Magnetic Saturation, Spatial Harmonics, and Iron Loss Effect. IEEE Trans. Ind. Electron. 2015, 62, 4044–4055. [Google Scholar] [CrossRef]
- Sciascera, C.; Giangrande, P.; Papini, L.; Gerada, C.; Galea, M. Analytical Thermal Model for Fast Stator Winding Temperature Prediction. IEEE Trans. Ind. Electron., 2017, 64, 6116–6126. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.Y.; Fang, J.C.; Liu, X.Q.; Han, B.C. Loss Calculation and Thermal Analysis of Rotors Supported by Active Magnetic Bearings for High-Speed Permanent-Magnet Electrical Machines. IEEE Trans. Ind. Electron. 2016, 63, 2027–2035. [Google Scholar] [CrossRef]
- Nerg, J.; Rilla, M.; Pyrhönen, J. Thermal Analysis of Radial-Flux Electrical Machines with a High Power Density. IEEE Trans. Ind. Electron. 2008, 55, 3543–3554. [Google Scholar] [CrossRef]
- Kim, W.H.; Kim, M.J.; Lee, K.D.; Lee, J.J.; Han, J.H.; Jeong, T.C.; Cho, S.Y.; Lee, J. Inductance calculation in IPMSM considering magnetic saturation. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Meessen, K.J.; Thelin, P.; Soulard, J.; Lomonova, E.A. Inductance Calculations of Permanent-Magnet Synchronous Machines Including Flux Change and Self- and Cross-Saturations. IEEE Trans. Magn. 2008, 44, 2324–2331. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.Q.; Liu, Y. Analysis of Air-Gap Field Modulation and Magnetic Gearing Effect in Fractional-Slot Concentrated-Winding Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2018, 65, 3688–3698. [Google Scholar] [CrossRef] [Green Version]
- Qu, R.H.; Lipo, T.A. Analysis and modeling of air-gap and zigzag leakage fluxes in a surface-mounted permanent-magnet Machine. IEEE Trans. Ind. Appl. 2004, 40, 121–127. [Google Scholar] [CrossRef] [Green Version]
- Bacco, G.; Bianchi, N.; Mahmoud, H. A Nonlinear Analytical Model for the Rapid Prediction of the Torque of Synchronous Reluctance Machines. IEEE Trans. Energy Convers. 2018. To be published. [Google Scholar] [CrossRef]
- Wang, Q.S.; Niu, S.X.; Yang, L. Design Optimization and Comparative Study of Novel Dual-PM Excited Machines. IEEE Trans. Ind. Electron. 2017, 64, 9924–9933. [Google Scholar] [CrossRef]
- Li, Q.W.; Dou, M.F.; Tan, B.; Zhang, H.; Zhao, D. Electromagnetic-Thermal Integrated Design Optimization for Hypersonic Vehicle Short-Time Duty PM Brushless DC Motor. Int. J. Aerosp. Eng. 2016. [Google Scholar] [CrossRef]
- Lopez-Torres, C.; Garcia, A.; Riba, J.; Lux, G.; Romeral, L. Computationally efficient design and optimization approach of PMa-SynRM in frequent operating torque-speed range. IEEE Trans. Energy Convers. 2018. [Google Scholar] [CrossRef]
- Lekić, Đ.; Vukosavić, S. Split ratio optimization of high torque density PM BLDC machines considering copper loss density limitation and stator slot leakage. Int. J. Elec. Power Energy Sys. 2018, 100, 231–239. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines, 2nd ed.; Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 331–377. [Google Scholar]
- Elrefaie, A.M.; Zhu, Z.Q.; Jahns, T.M.; Howe, D. Winding Inductances of Fractional Slot Surface-Mounted Permanent Magnet Brushless Machines. COMPEL Int. J. Comput. Math. Elec. Electronic Eng. 2009, 28, 1590–1606. [Google Scholar] [CrossRef]
- Kou, B.; Jin, Y.; Zhang, H.; Zhang, L.; Zhang, H. Nonlinear Analytical Modeling of Hybrid-Excitation Double-Sided Linear Eddy-Current Brake. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Arumugam, P.; Hamiti, T.; Gerada, C. Analytical Modeling of a Vertically Distributed Winding Configuration for Fault Tolerant Permanent Magnet Machines to Suppress Inter-Turn Short Circuit Current Limiting. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 371–376. [Google Scholar]
- Mellor, P.H.; Wrobel, R.; Holliday, D. A computationally efficient iron loss model for brushless AC machines that caters for rated flux and field weakened operation. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 490–494. [Google Scholar]
- Simpson, N.; Wrobel, R.; Mellor, P.H. Estimation of Equivalent Thermal Parameters of Impregnated Electrical Windings. IEEE Trans. Ind. Appl. 2013, 49, 2505–2515. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| DC bus voltage/(V) | 160 | Rated speed/(r/min) | 4000 |
| Poles/slots | 6/9 | Stator split ratio | 0.51 |
| calculated torque/(N.m) | 3.2 | Electrical load/(A/cm) | 210 |
| Airgap length/(mm) | 0.8 | Magnetic load/(Tesla) | 0.65 |
| Radial length/(mm) | 62 | PM thickness/(mm) | 6 |
| Parallel tooth width/(mm) | 10.5 | Polar arc coefficient | 0.9 |
| Maximum output torque/(N.m) | 30 | Natural method | Natural cooling |
| Efficiency | Torque = 3.28 N·m | Torque = 7.7 N·m |
|---|---|---|
| The conventional motor | 95.2% | 93.4% |
| The high overload motor | 94.5% | 91.8% |
| Current Density (A/mm2) | Electrical Load (A/cm) | Working Time (s) |
|---|---|---|
| 11.8 | 501.6 | 5 |
| 15.7 | 667.3 | 5 |
| 19.7 | 837.3 | 5 |
| 23.6 | 1003.0 | 5 |
| 27.6 | 1173.0 | 5 |
| 31.4 | 1334.5 | 3 |
| 35.4 | 1504.5 | 3 |
| 39.3 | 1670.3 | 3 |
| 43.3 | 1840.3 | 3 |
| 0 | 0 | 113 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.-X.; Li, L.-Y.; Cao, J.-W.; Gao, Q.-H.; Sun, Z.-Y.; Zhang, J.-P. The Optimization Design of Short-Term High-Overload Permanent Magnet Motors Considering the Nonlinear Saturation. Energies 2018, 11, 3272. https://doi.org/10.3390/en11123272
Liu Y-X, Li L-Y, Cao J-W, Gao Q-H, Sun Z-Y, Zhang J-P. The Optimization Design of Short-Term High-Overload Permanent Magnet Motors Considering the Nonlinear Saturation. Energies. 2018; 11(12):3272. https://doi.org/10.3390/en11123272
Chicago/Turabian StyleLiu, Yu-Xi, Li-Yi Li, Ji-Wei Cao, Qin-He Gao, Zhi-Yin Sun, and Jiang-Peng Zhang. 2018. "The Optimization Design of Short-Term High-Overload Permanent Magnet Motors Considering the Nonlinear Saturation" Energies 11, no. 12: 3272. https://doi.org/10.3390/en11123272
APA StyleLiu, Y.-X., Li, L.-Y., Cao, J.-W., Gao, Q.-H., Sun, Z.-Y., & Zhang, J.-P. (2018). The Optimization Design of Short-Term High-Overload Permanent Magnet Motors Considering the Nonlinear Saturation. Energies, 11(12), 3272. https://doi.org/10.3390/en11123272