1. Introduction
Due to the increasing demand for electrical power and the decreases in fossil resources, most countries in the world have urgently turned to renewable and sustainable energy [
1,
2]. In the past decade, wind power, especially offshore wind power, has developed rapidly and become a significant source of renewable energy to supply electricity throughout the world [
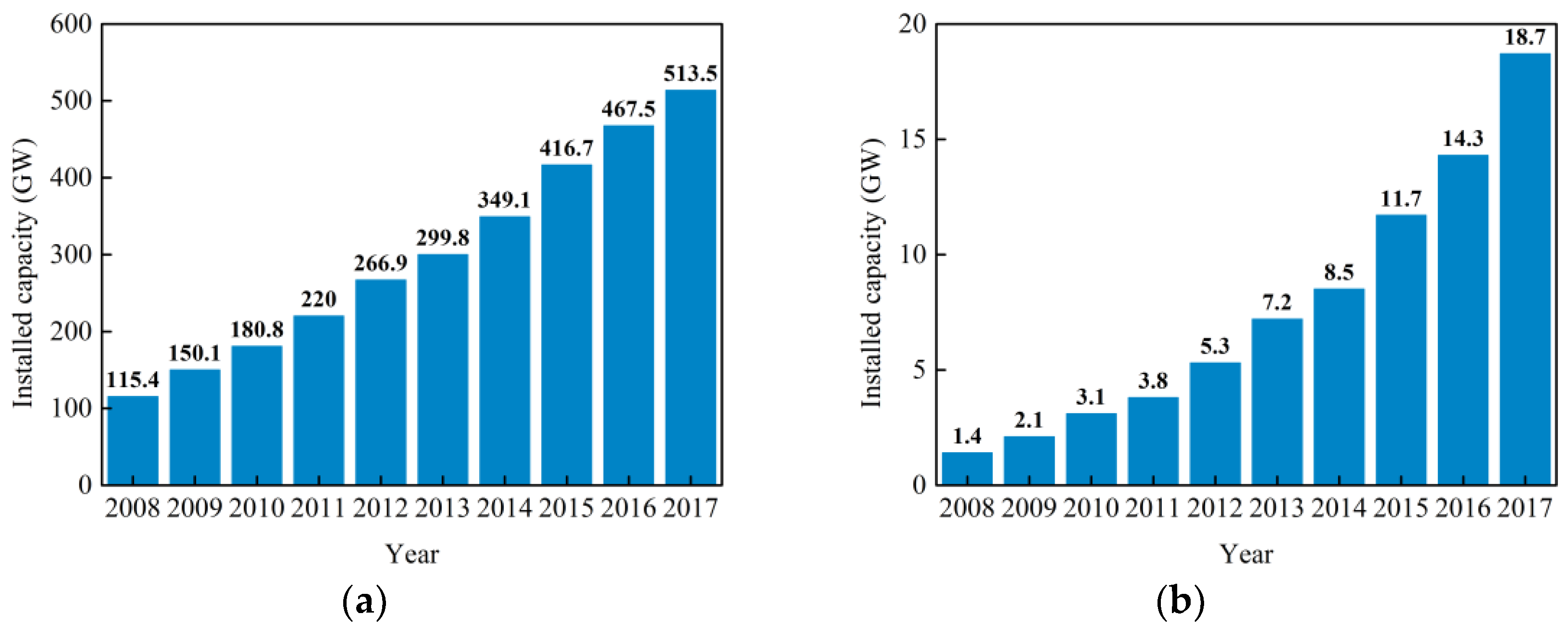
3]. By the end of the year 2017 [
4], the total installed capacity of wind power has reached 513.5 GW, which is about 4.4 times as large as the capacity of 115.4 GW in 2008. Meanwhile, the total installed capacity of offshore wind energy has risen sharply from 1.4 GW to 18.7 GW during the past ten years with an average annual growth rate of 30% as shown in
Figure 1. Compared with onshore wind power, offshore wind power shows many outstanding advantages such as better quality of wind resources, larger suitable free area to install, closer to the electricity consumption center and less influence on the environment [
5,
6]. Moreover, with the continuous development of offshore wind power, taller tower, longer blades and larger capacity generators will be recommended for use in wind farms to capture more wind resources and reduce unit production costs [
7].
China, with a mainland coastline of more than 18,000 km in length, has particularly rich offshore wind resources, which play important roles in accelerating the progress of green and renewable energy supply [
7]. Nevertheless, the development of offshore wind power can face extreme winds. Being located in the west coast of the Pacific Ocean subjected to tropical anticyclones and the South China Sea monsoons [
8], offshore wind farms in China experience super-typhoons annually, such as Maria (2018, 48 m/s), Hato (2017, 48 m/s), Meranti (2016, 45 m/s), Mujigae (2014, 50 m/s) and Rammasun (2014, 55 m/s). These extreme winds exert destructive power onto the offshore wind turbine (OWT) structures, causing great vibrations resulting in structural damage or even in collapses. In this regard, this can lead to a substantial economic loss or reduction in power production during the OWTs’ service lifetime. Thus, it is meaningful to mitigate the dynamic responses of the OWT under extreme winds to ensure its structural safety and increase the reliability. To solve this problem, various types of vibration control devices and control methods have been proposed [
9,
10]. For instance, passive dampers, like tuned mass dampers (TMDs) [
11,
12,
13,
14], tuned (column) liquid dampers (TLDs or TCLDs) [
15,
16] and magneto-rheological fluid dampers (MRFDs) [
17], have been extensively adopted to alleviate the vibration of OWTs and improve their resistance to multi-hazards. Among all the passive control devices, traditional TMDs are most widely used and feasible for vibration control [
13,
14]. For absorbing vibration energy and reducing dynamic responses, the natural frequencies of the TMDs should be set to be close to that of the controlled structures by adjusting the ratio between mass and spring or the length of the pendulum. However, viscous dampers employed in the TMDs have well-known problems that are possible leakage of oil or gas and difficulty in adjustment and maintenance [
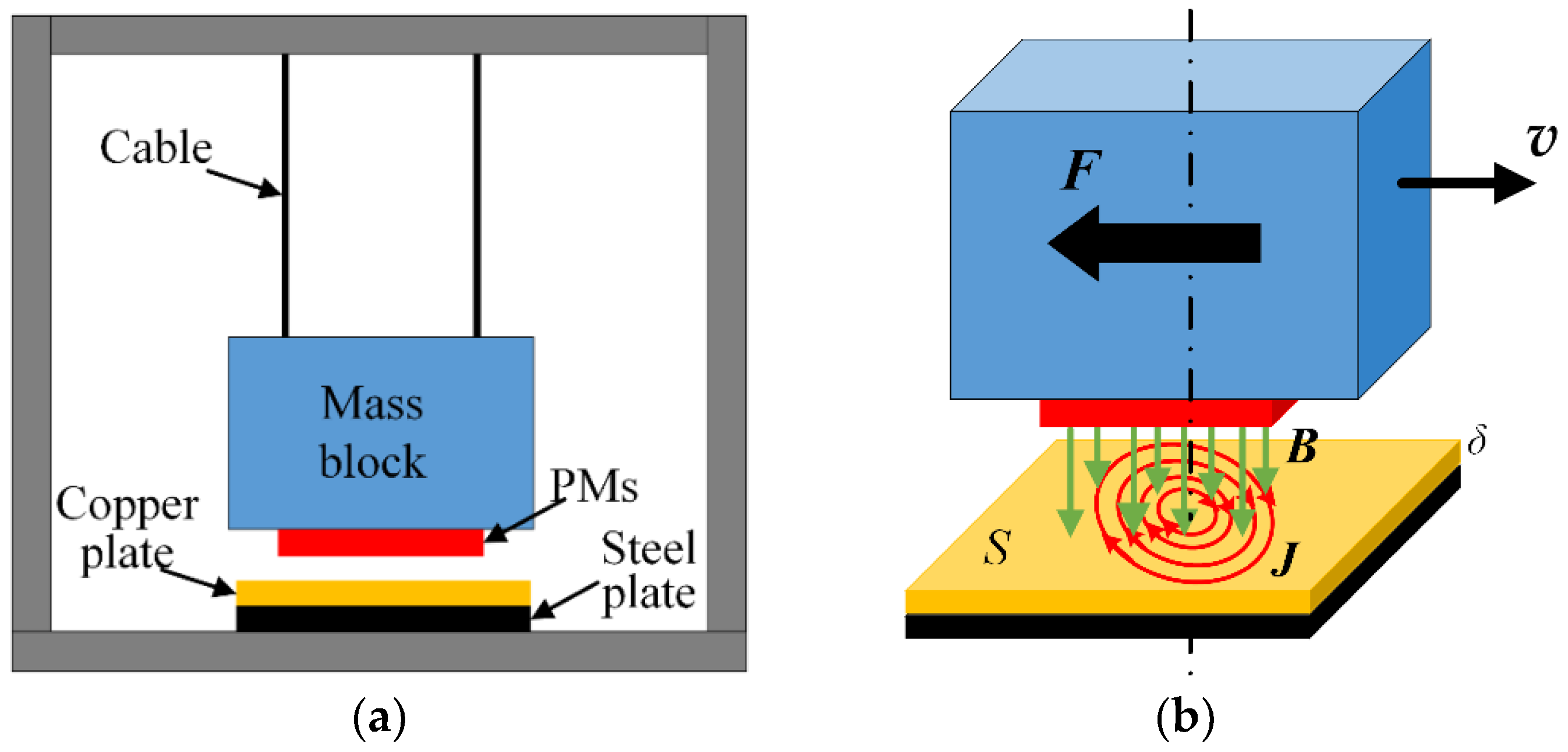
18]. Alternatively, an eddy current damper (ECD), as a contactless damper without modifying the stiffness of the controlled structures, is seen to be a potential and innovational solution to the above problems [
18,
19]. Moreover, the ECD has good energy dissipation ability, stable performance and reasonable robustness, which makes full use of the electromagnetic or eddy current damping forces [
20].
The damping mechanism of the ECD was demonstrated by analytical models and experimental model tests. Wang et al. [
18] conducted theoretical and experimental studies on a large-scale TMD with the ECD, indicating that the feasibility and reliability of the EC-TMD system in vibration mitigation. Sodano et al. [
21,
22] provided an improved mathematic model for predicting the damping force induced by the relative movement of the conductive materials in the magnetic fields, confirming a good performance of reducing the vibration responses of a beam. Ebrahimi et al. [
23] analyzed the damping characteristics in the ECD through experiments and theory deviations and illustrated that it was applicable in vibration suppression systems. Bae et al. [
24] applied a lightweight TMD with the ECD to a large beam structure, showing that the efficiency of the TMD in vibration attenuation was increased using the ECD. Lu et al. [
25] estimated the effectiveness and performance of the EC-TMD system by installing it on the top of a steel-frame model and performing shaking table tests, thus demonstrating the EC-TMD system was an excellent passive device forin suppressing vibrations under seismic excitation condtitions. Irazu et al. [
26] analyzed the damping characteristics of the eddy current and proposed a new inverse method to simulate its influences on mitigating the vibrations of a cantilever beam. Many researchers have tried to utilize EC-TMD systems to solve practical engineering problems in long-span structures and high-rise buildings. Lei et al. [
27] developed a new type of EC-TMD system and applied it into the practical engineering of the Rongjiang hangers of steel arch bridges to increase the damping ratio of the system. Chen et al. [
19] utilized a new EC-TMD system including a permanent magnet plane for the vibration control of a large floor structure made of steel-concrete, improving the anti-vibration performance. Saige et al. [
28] tried to improve the TMD effectiveness in reducing vibration induced by pedestrians on footbridges by adding eddy current damping. Lu et al. [
29] performed different scale-model tests of anthe EC-TMD system, which was firstly used in the ultra-highrise building of the Shanghai Center Tower, noticeably attenuating the structural acceleration and displacement caused by winds and earthquakes.
The main contribution of this study is to exploit the effectiveness of the EC-TMD system in vibration control by experimental tests and apply it to the practical engineering of the OWT structures. To the best knowledge of the authors, it is the first time that this new type of the EC-TMD system is proposed to mitigate the vibration of the OWT structure under extreme winds. This paper is organized as follows: firstly, the damping mechanics of the EC-TMD system and its implementation in analytical models are introduced in
Section 2. Then, experimental studies of the EC-TMD system in vibration mitigation are performed in small-scale model tests by free attenuation and base-excitation in
Section 3. Additionally, the project overview and prototype observation of the CBF-supported OWT structures at the Xiangshui Wind Farm of China are introduced in
Section 4.
Section 5 contains numerical simulations for the EC-TMD system in improving resistance to t OWT structure vibration under extreme winds. Lastly, the conclusions of the whole work and the outlook for further studies are described in
Section 6.
3. Experimental Study of the EC-TMD System in Vibration Mitigation
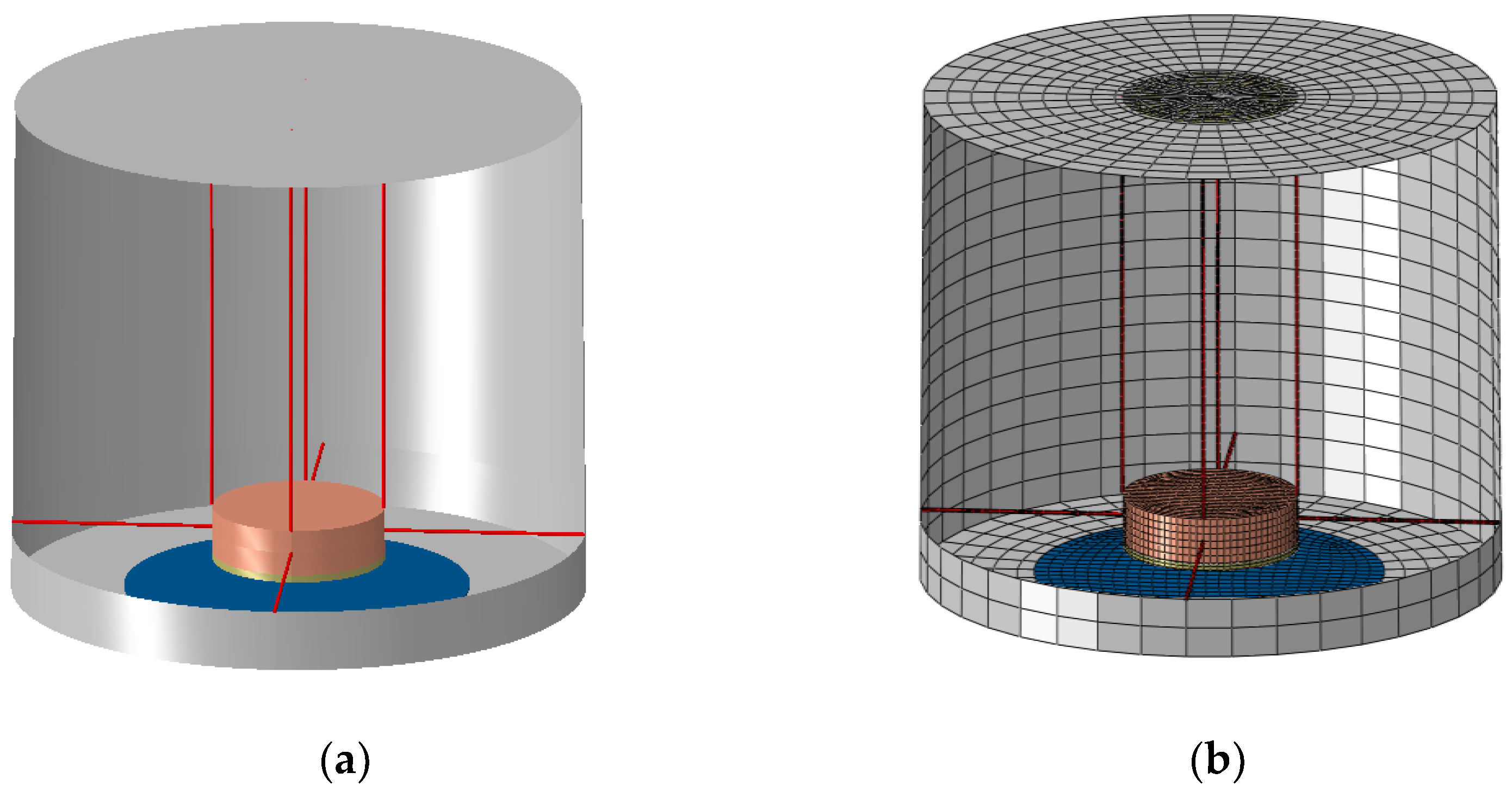
To validate the effectiveness of the EC-TMD system in reducing vibration responses, a series of small-scale model tests were conducted at the Hydraulic Power Center of Tianjin University, China. Unlike many previous studies that EC-TMD system was investigated alone, the EC-TMD system is installed on the top of a primary structure. The gaps between the PMs and the copper plate and the PMs layouts are investigated on the influence of the damping ratio of the whole system.
Figure 4 describes the schematic diagram and real structures of the experiment consisting of a shaking table and control system, a primary structure and the EC-TMD system, and an acquisition system, in which ‘a’ represents acceleration sensor and ‘d’ represents vibration displacement sensor.
3.1. The Primary Structure
The primary structure, which mainly comprises a scale model (1:20) of a bucket foundation, a tube and a mass block, is made of steel.
Table 1 gives the properties for the primary structure. As a supporting part, both of the bottom and top steel plate have 240 × 240 × 5 mm dimensions, and the bottom one is fixed to a bucket foundation by four bolts then fixed to a shaking table by six bolts.
3.2. Parameters of the EC-TMD System
Figure 4 describes the layouts of the EC-TMD system. According to the references [
18,
32], Nd
2Fe
14B is selected as the PMs material and the size of the PM is 0.1 × 0.05 × 0.01 m, while the size of the copper plate is 0.2 × 0.2 × 0.002 m. The mass of the TMD and its natural frequency are 2.0 kg and 2.2 Hz, respectively, which can be adjustable by changing the length of the cables. The TMD is suspended by the cables from a stiffness plexiglass plate. The PMs are attached to the bottom of the TMD mass block, while the copper plate and steel plate are fixed on the plexiglass plate. Supporting structures consisting of four screw rods are used to support the plexiglass plate and adjust the distance between the two plates.
3.3. Test Results and Discussions
The free attenuation curves of displacements with various gaps between the copper plate and the PMs are shown in
Figure 5.
The gaps (L) between the PMs and copper plate are chosen as 5 cm, 4 cm, 3 cm and 0 cm, respectively noted as Case 1, Case 2, Case 3 and Case 4, in which Case 4 indicates that there is no additional damping effect of the EC-TMD system. Hence, the natural frequency and damping ratio of the primary structure are 2.2 Hz and 4.3%, respectively. In the four cases, the copper plate thickness and PMs layouts are kept the same. In this figure, Case 1 can be used to represent the EC-TMD system with little eddy current damping, while Cases 2 and 3 present increasingly more EC-TMD damping as the gaps decrease and the magnetic field increase in the copper plate. It is worth noting that free attenuation curve in Case 3 shows some unstable feature and then quickly return to stability. The reason for such a curve may be that nonlinear eddy current damping has a greater influence on the dynamic characteristics of the primary structure than the inertial force and gravity in the EC-TMD system. In the subsequent study, nonlinear eddy current damping should be avoided which is beyond the scope of this study.
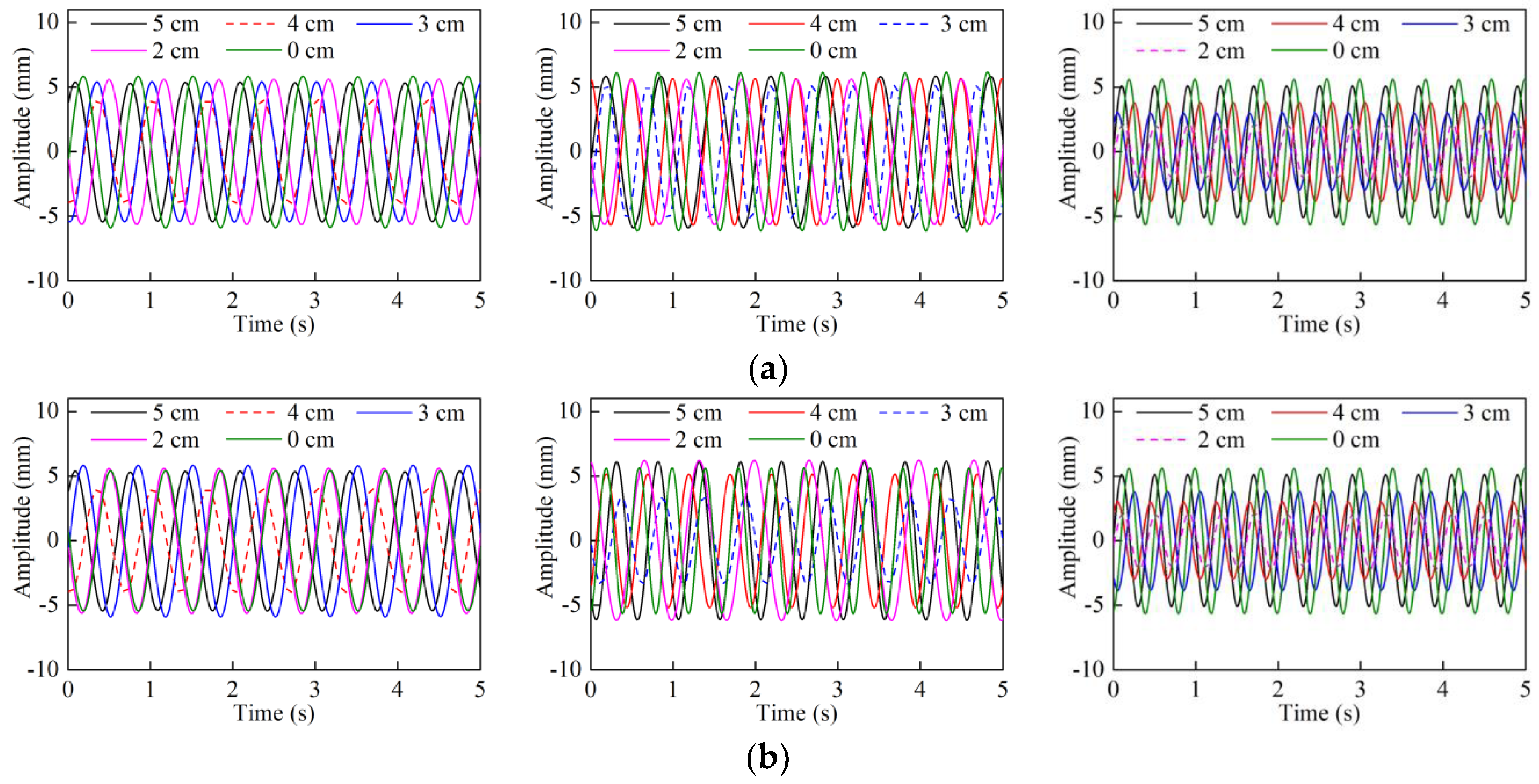
Furthermore, subsequent tests were conducted to determine the influencing factors of the different parameters on the damping ratio of the EC-TMD system. The copper plate thickness is fixed at 2 mm. PMs layouts include three cases shown in
Figure 6, while
Figure 7 presents free attenuation curves for the first two PMs layouts. Furthermore, the results are collected in
Table 2. It can be observed that the damping ratios of III PMs layout is larger than that of the first two PMs layouts due to stronger magnetic fields and eddy current damping forces, while there is the same of the damping ratio for the first two PMs layouts.
As to the small-scale model subjected to base-excitations caused by the shaking table,
Figure 8 provides the displacement time histories at the top of the model under different base-excitations, the gaps and PMs layouts. As shown, a forced vibration phenomenon is observed in this figure, in which the vibration response period is the same as that of the base-excitation. Meanwhile, the EC-TMD system is excited, and relative movement between the PMs and the copper plate occurs, resulting in the magnetic field changes within the copper plate and producing eddy current damping force. Moreover, in the same PMs layout, there are various vibration displacement amplitudes in different base-excitation frequencies. For instance, in the I and III PMs layouts conditions, the gaps for the minimum vibration amplitudes are 4 cm, 3 cm and 2 cm corresponding to the base-excitation frequencies of 1.5 Hz, 2.0 Hz and 2.5 Hz shown in dot lines in the figure. The possible reasons for these differences are attributed to the coupling interaction of the magnetic force and excitation force. To be specific, in the EC-TMD system, if the magnetic field force between the PMs and the steel plate is even stronger than the driving force of the system bottom, the relative movement between the PMs and the copper plate is reduced, so as to the eddy current damping force. On the contrary, if the magnetic field force is much smaller than the driving force, the relative motion of the PMs and the copper plate is enhanced, and the TMD in the EC-TMD system mainly exhibits its vibration damping characteristic, and the eddy current will add a damping force to the whole structure, too. Additionally, if the magnetic field force is equivalent to the driving force, both the eddy current damping and the TMD’s damping work together to provide a reaction force and dissipate energy for the primary structure. Therefore, influencing factors as the gaps, the PMs layout and magnetic field intensity should be taken into consideration for proper application in practical engineering.
4. Project Overview and Prototype Observation
The location of the Xiangshui Wind Farm and a photograph of the CBF are depicted in
Figure 9. The OWT is supported by the CBF situated in the Yellow Sea areas belonging to Xiangshui County in Jiangsu Province of China. The offshore distance of the wind farm is about 10 km (the straight line distance between the wind farm center and the nearest shoreline), and the wind farm is about 10 km long and 2.5 km to 5.5 km wide perpendicular to the coastline with an area of about 90 km
2, where the planned installed capacity is 200 MW. The CBF consists of a steel bucket with 30.0 m diameter and 12 m height, pre-stressed concrete transition part with 5.1 m to 20 m diameter and 20 m height, which has a total weight of about 2700 t. The parameters of the 3.0 MW OWT can be found in
Table 3.
An innovative one-step installation technology is used to install the OWT structure, which is assembled onshore, then floated to the target location by ship and finally installed at the designed depth by self-weight and negative pressure [
33,
34]. After installation of the CBF, the structural vibration response signals can be obtained by the prototype observation with several sensors installed at the top of the tower [
35]. The X- and Z-directions are the tangential and radial direction of the tower wall in the same horizontal plane [
35]. To obtain the dynamic characteristics of the OWT under parking conditions, the observed signals in X- and Z-directions are chosen to be analyzed with the mean wind speeds of 2.0 m/s and 3.1 m/s, and time histories and normalized power spectrum density (PSD) are presented in
Figure 10. As shown, the corresponding frequencies to peak values of the vibration responses in X- and Z-directions are concentrated at about 0.35 Hz, which should be considered as the natural frequency of the OWT structure. Furthermore, the half-power bandwidth method [
36] is implemented to obtain the damping ratio of the OWT structure. Thus, both the results of the natural frequencies and damping ratio can be employed in the subsequent numerical simulations, as shown in
Table 4.
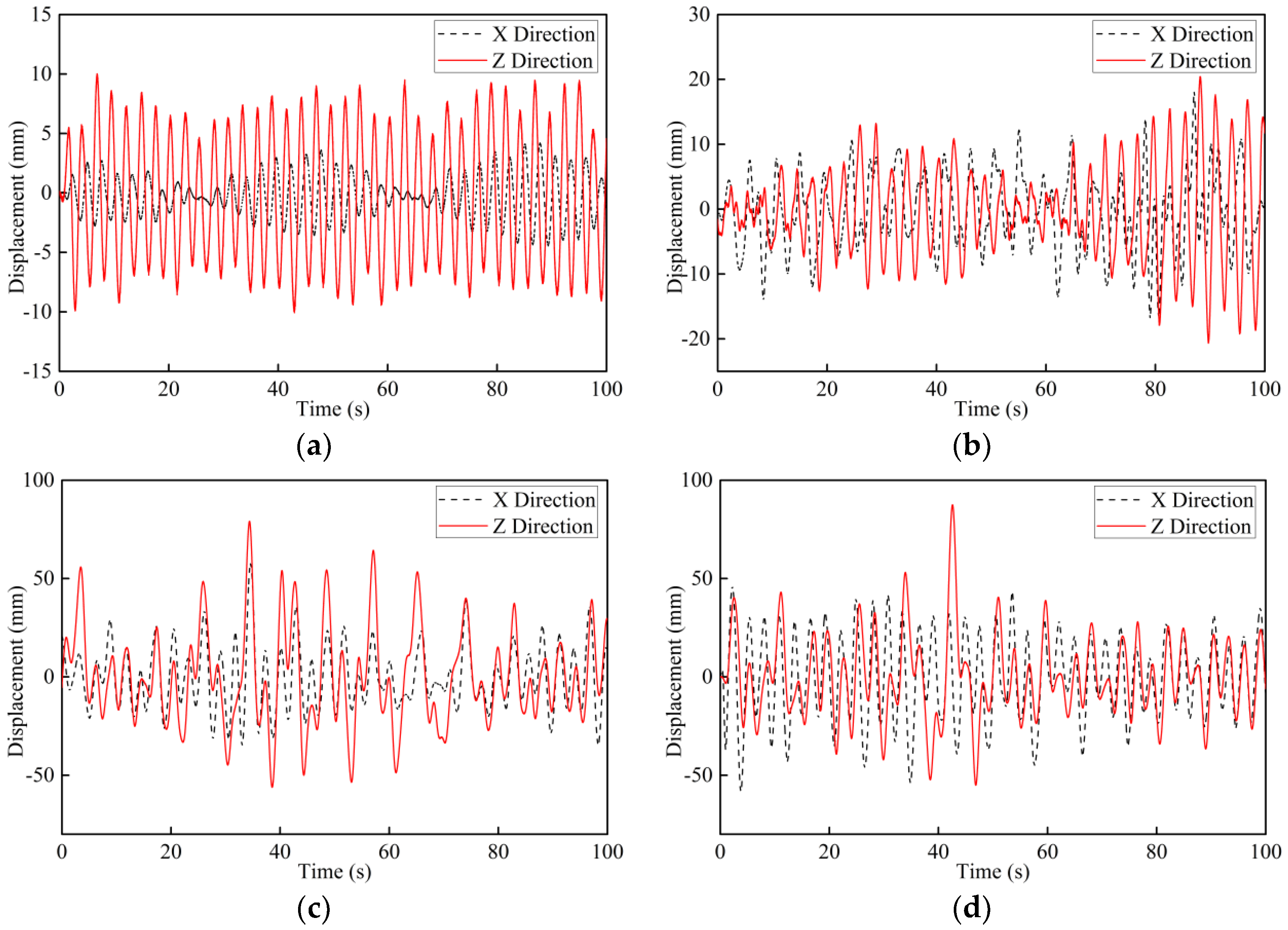
Moreover, under operational conditions, the vibration time histories in X- and Z-directions are displayed in
Figure 11, with mean wind speeds of 4.1 m/s, 8.5 m/s, 16.1 m/s and 17.1 m/s. Thus, there are the resultant displacements apparently increase with the mean wind speeds, which is in line with the reference [
35].























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}