1. Introduction
The demand for and development of global wind power energy have both significantly increased in the past decades. Wind power can be captured and converted into electricity through the use of wind turbines. Wind turbines are mainly classified into horizontal-axis wind turbines (HAWTs) and vertical-axis wind turbines (VAWTs) with regard to the direction of the rotating axis. As the aerodynamic efficiency of HAWTs is generally better than that of VAWTs, nowadays the application of HAWTs with higher commercial values is mainstream in the wind energy industry.
Since greater wind resources and potential could be explored in deeper seas, wind farms are moving towards deep water in recent years. Floating offshore wind turbines have become an available solution which could be widely used in deep water. Spar, semisubmersible, and tension-leg platform (TLP)—which have been utilized in the oil and gas industry for a long time—are three primary types of floating structures for offshore wind turbines. The dynamic responses of these floating structures in the presence of the marine environment are crucial for their design purpose. The natural period of a floater is a critical index to represent its dynamic behavior. Typically, a spar is characterized by small heave motion, and its natural periods in surge/sway are usually higher than 100 s [
1]. Additionally, several prototypes of floating HAWTs have been developed, such as a catenary moored spar in the Hywind project in Norway, a semisubmersible in the WindFloat demo in Portugal, and a spar-type floating wind turbine in Japan’s Minister of Environment (MOE) project at Kabashima [
2]. A commercial floating wind farm, i.e., the Hywind Scotland by Statoil, started production in 2017. The feasibility of spar-type HAWTs at different water depths has been studied by Karimirad and Moan [
3,
4]. Their research indicates that the short spar HAWT in moderate water depth exhibits good performance in dynamic responses and maintains almost the same power production as the deep spar HAWT in deep water.
Floating VAWTs are a promising alternative to floating HAWTs due to their potential for cost-of-energy reduction and maintenance. Additionally, the structural scalability and the heavier components at the base of the structure allow a bigger rotor diameter for the VAWT to capture more energy. For the evolution of rotor size, floating VAWTs are more competitive. However, the development of floating VAWTs is still at an early stage. Some floating VAWT concepts have been proposed to explore their feasibility, such as a spar buoy with a two-bladed Darrieus rotor in the DeepWind project [
5], and a Spinwind-1 prototype with a helical Darrieus rotor and a floater from the Gwind project [
6], etc. Moreover, the DeepWind project was later extended for further investigation to include a 5 MW baseline rotor and an optimized blade design with less weight and higher stiffness [
7,
8]. Several researchers have contributed mass efforts to floating VAWT studies in deep water conditions. Wang developed a fully coupled method (SIMO-RIFLEX-DMS code) for dynamic analysis and applied it to a semisubmersible VAWT [
9]. Cheng developed another fully integrated method for VAWT numerical modeling (SIMO-RIFLEX-AC code), and studied the dynamic response for various concepts, such as the dynamic analysis of spar, TLP, and semisubmersible VAWTs, etc. [
10]. Ugochukwu analyzed the structural dynamic responses of a 5 MW baseline floating VAWT and a 5 MW optimized floating VAWT with the DeepWind Darrieus rotor under steady and turbulent wind conditions [
11]. Liu et al. presented a motion study of a 5 MW floating VAWT composed of a truss spar floating foundation with heave plates under decay tests, wind only, regular wave and wind, and irregular wind and wave cases [
12]. Overall, most of the available floating VAWT concepts have been evaluated in deep water, whereas the feasibility of deploying a floating VAWT at a moderate water depth has not yet been discussed.
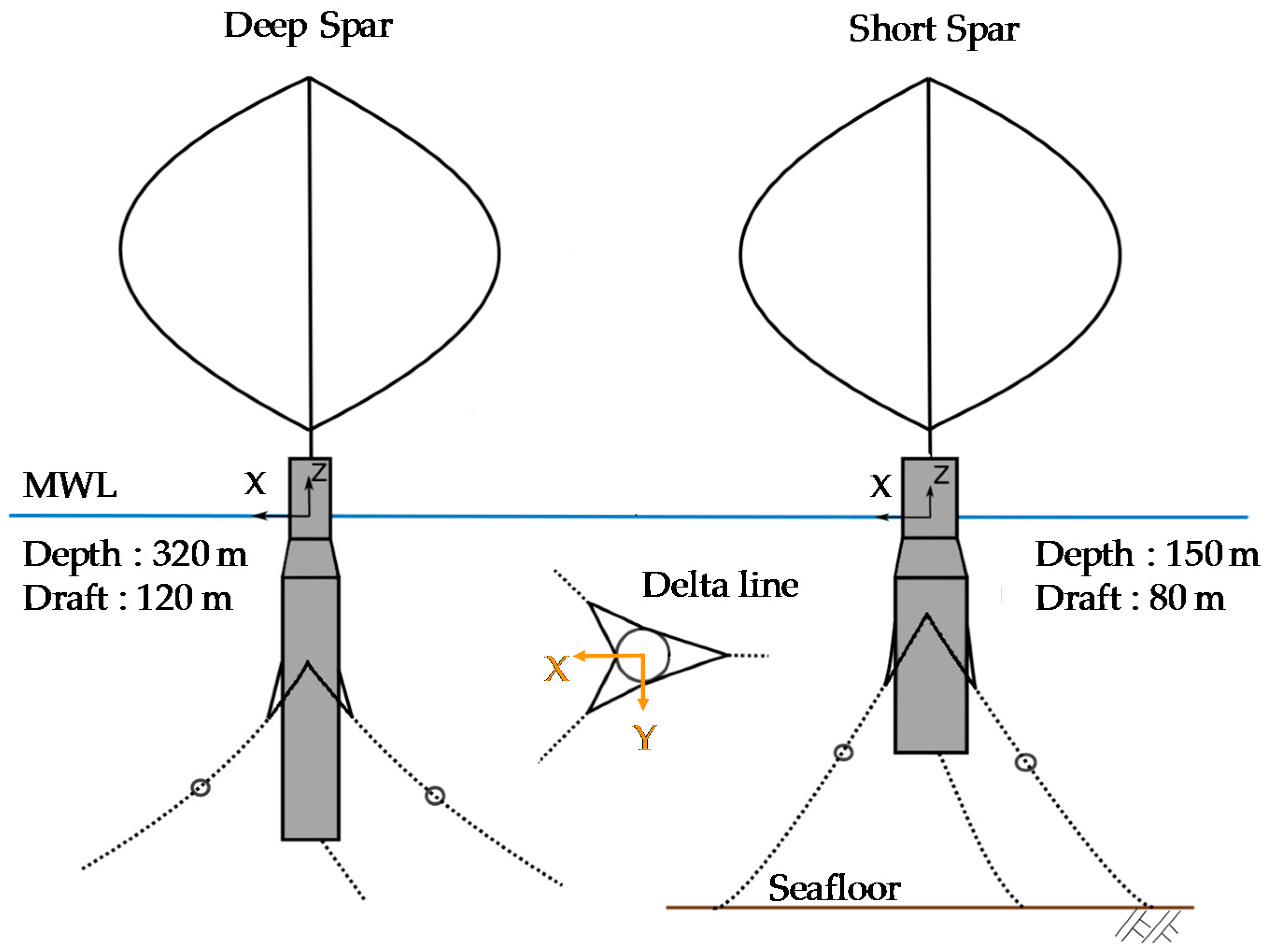
In this paper, a short spar VAWT with catenary mooring lines carrying a 5 MW Darrieus rotor in a moderate water depth (150 m) is proposed by following the deep spar concept. The methodology and modeling for both the spar VAWTs are introduced in
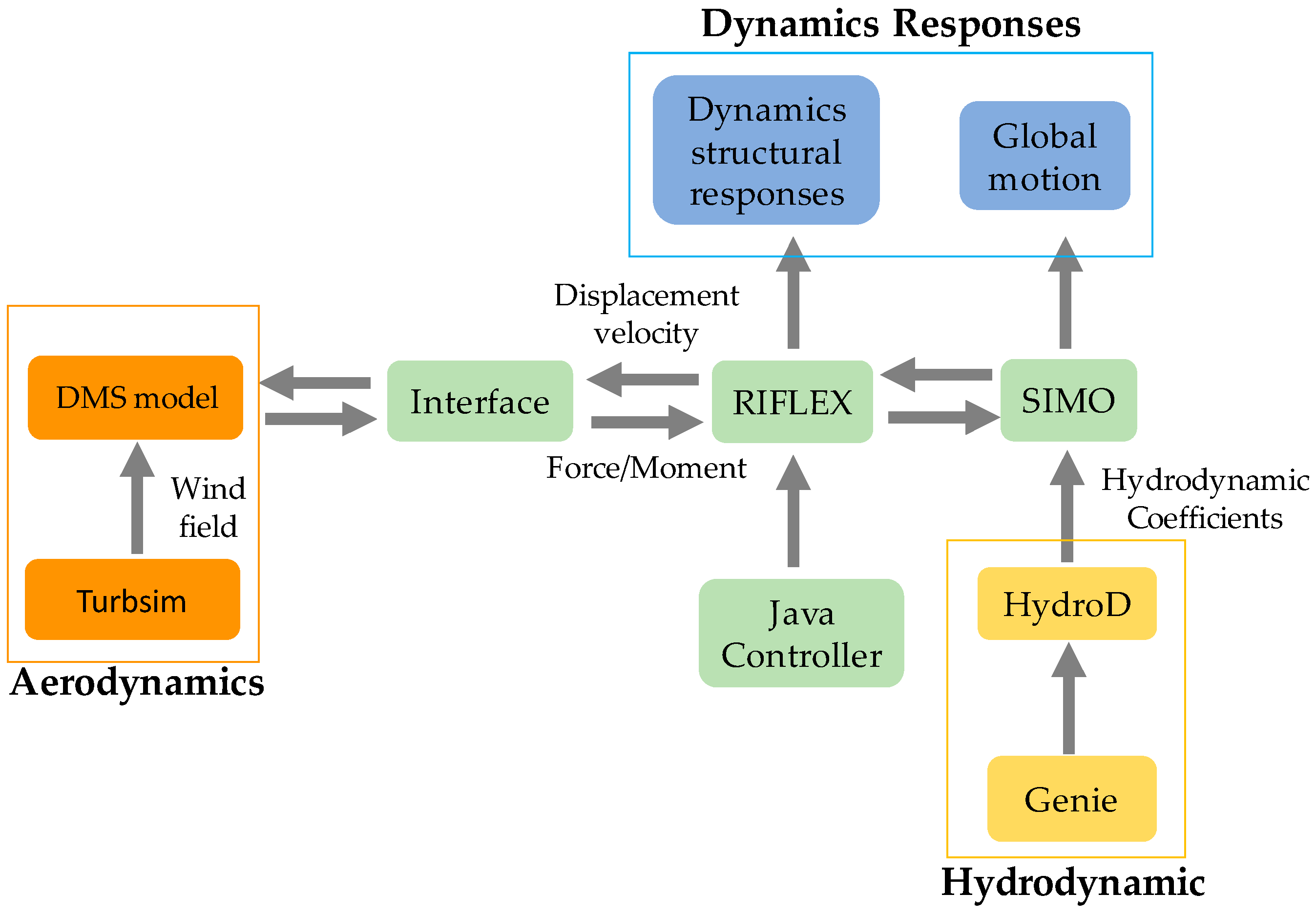
Section 2. The dynamic response of the spar-type structure with the VAWT is analyzed through the fully coupled SIMO-RIFLEX-DMS code. Various combinations of irregular wind and wave for operating conditions are utilized to assess the response and performance of both the spar VAWTs.
Section 3 presents dynamic response analysis of the short spar and deep spar VAWTs. The power performances for both the spar VAWTs are compared and evaluated. A comparative study of platform motions, tower base bending moments, and tension of mooring lines between the short spar VAWT in moderate water and deep spar VAWT in deep water is discussed. Finally, a summary of this study is shown in
Section 4. The feasibility of the short spar concept in moderate water conditions is addressed.
3. Dynamic Response of Spar VAWTs
The dynamic response of spar VAWTs was calculated through time domain nonlinear fully coupled analysis. The dynamic response includes the natural periods of spar, platform motion, structural response, tension of the mooring lines, and power production. Additionally, the comparison between the dynamic response in the deep spar and short spar VAWT were studied under different environmental conditions listed in
Table 4.
3.1. Free Decay Tests
The natural periods of the short spar and deep spar are presented in
Table 5. For the natural periods of the deep spar VAWT, we can refer to Cheng et al. [
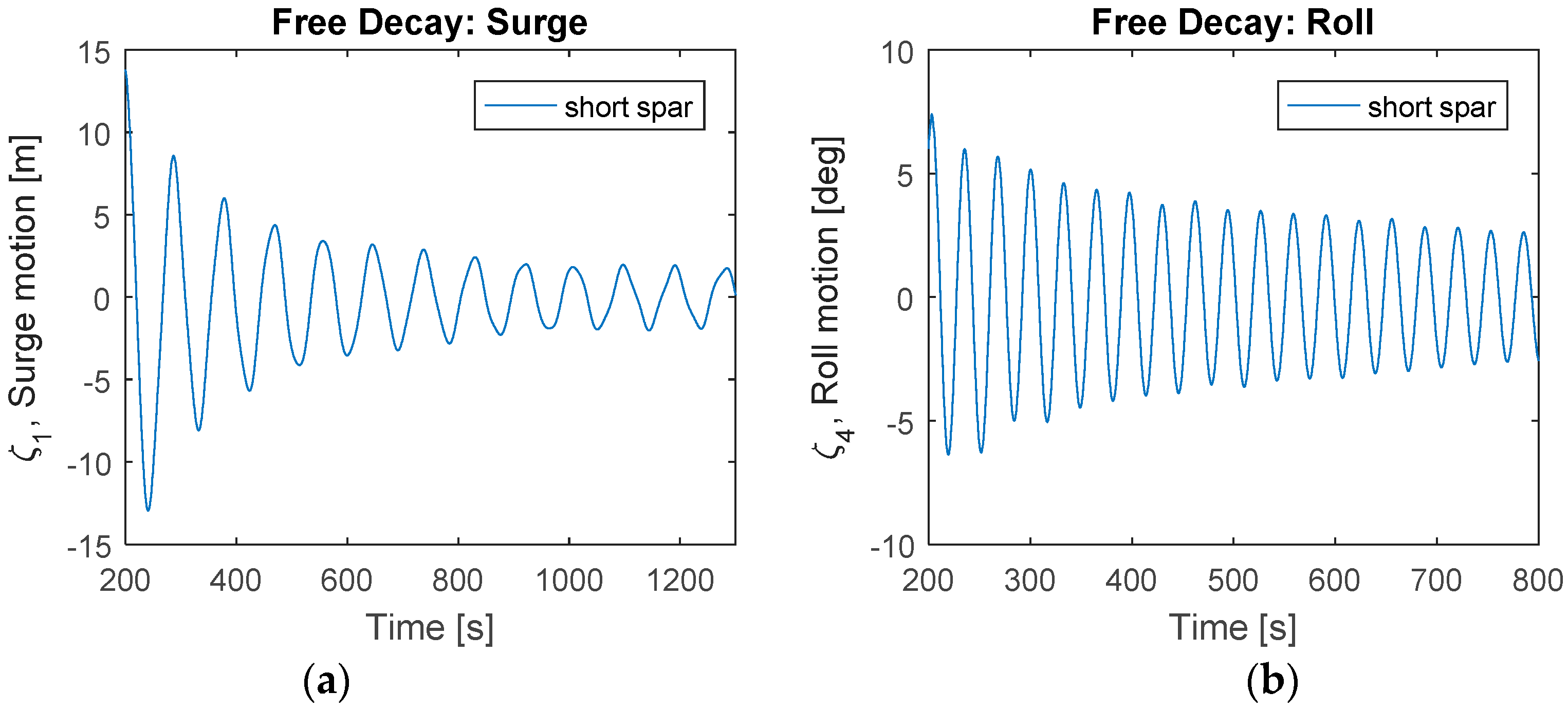
13]. Free decay tests were applied to identify the natural periods of the short spar VAWT (
Figure 4). Free decay tests were carried out in calm water. The wind turbine was parked without any aerodynamic loads on the rotor, and one specified force acted in each of six degrees of direction with a very short period (200 s) to simulate its dynamic response.
For surge and sway, the natural periods of both spars are quite long. The natural period of the short spar is smaller than that of the deep spar, since the restoring stiffness of the short spar is larger due to the stiffer and shorter mooring lines. In heave, both spars are close to the upper limit of the wave periods. The short spar has a larger waterline area, and its natural period is smaller than that of the deep spar. For roll and pitch, the natural periods of both spars locate outside the range of wave periods; hence, the wave-induced resonant motions may not be substantial. However, both spars are situated inside the range of wave periods in yaw motion. Significant motion may be expected to occur in the yaw direction.
3.2. Wind Turbine Performance
The rotor speed of the short spar VAWT and deep spar VAWT under all loading cases are plotted in
Figure 5 and summarized in
Table 6. A good agreement in rotor speed between the short and deep spar are shown in this figure. The rotor speed principally increases as the wind speed increases, but the rotor speed starts to decrease with the rising wind velocity after it reaches the rated speed. This mechanism can be explained by the fact that a Proportional Integral (PI) generator controller is employed to decrease the rotational speed in order to keep the power approximately constant [
9].
The rotor rotation causes the aerodynamic loads on the spar VAWTs. One of the most prominent dynamic loads in VAWTs is the 2P loading. The blade shadowing effect and the variation in torque lead to 2P loading, which is a periodic loading. The 2P frequency is twice the 1P frequency since the Darrieus wind turbine has two blades. The 2P loading can decompose into thrust and lateral force which are parallel and normal to the wind flow direction, respectively.
A snapshot of the comparison between the 2P loading in the short spar VAWT and deep spar VAWT under rated speed (LC3) from 2000 to 2020 s is shown in
Figure 6. Generally, the amplitudes of thrust and lateral force are similar. The mean value of lateral force is approximately zero, but the thrust fluctuates between zero and double the mean value. In addition, the amplitude of the short spar VAWT is almost the same as that of the deep spar VAWT in both thrust and lateral force, but the phase among these two spars is different. The average periods of thrust and lateral force are each around 6 s, which correspond to the 2P frequency.
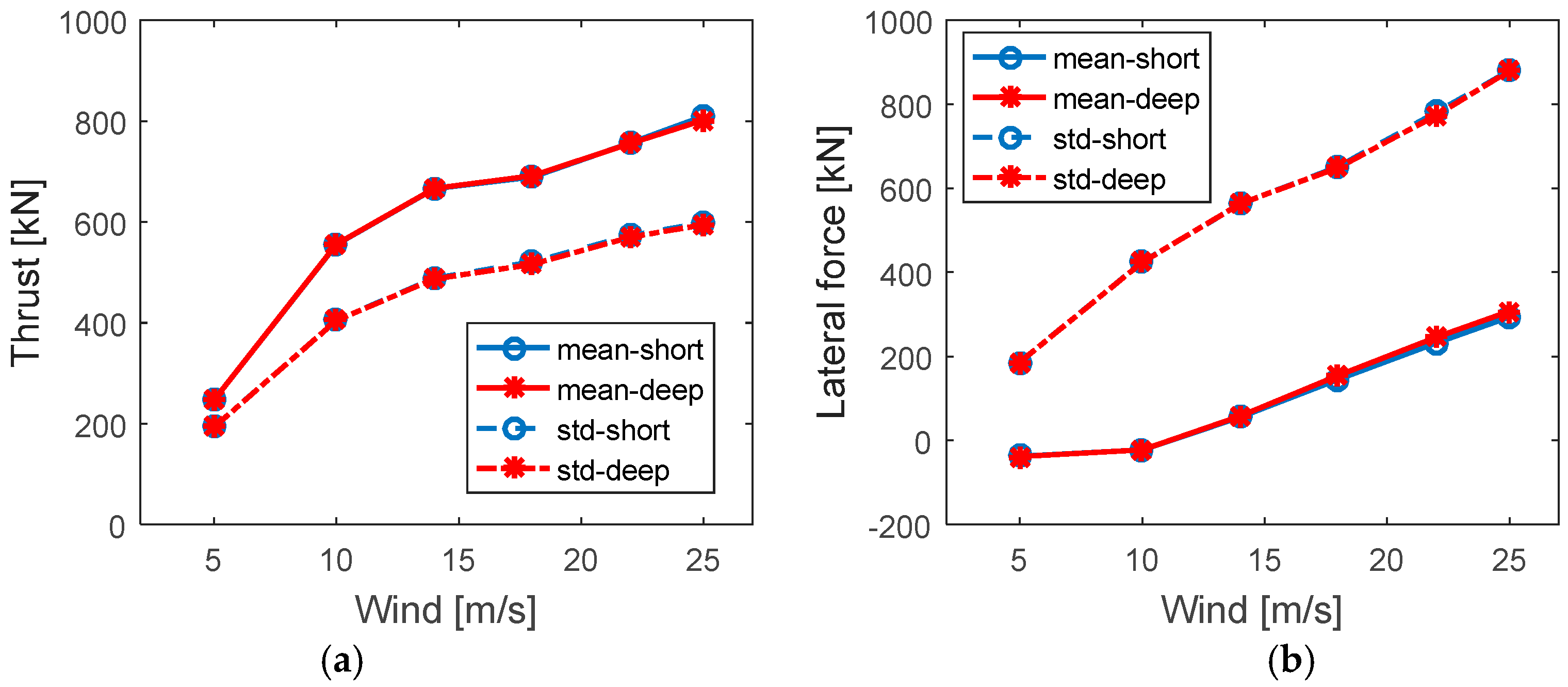
Figure 7 displays the statistical comparisons of the thrust and lateral force for both spars under all loading cases. For simplicity, the results are plotted with the mean wind speed only even the loading includes the turbulent wind and irregular wave simultaneously. Both the comparisons indicate a good agreement between the short spar and deep spar. The mean values and standard deviations of the thrust and lateral force increase separately as the wind speed increases.
In addition, the variation of relative speed along the height of the VAWT is included in this simulation. Since both the spar VAWTs carry the same 5 MW Darrieus rotor and withstand the same environmental loadings, the aerodynamic effect of wind turbines in both models could be expected to be similar. Therefore, a further discussion about the aerodynamic effect is not shown in this work.
The generator power production of the short spar VAWT and deep spar VAWT under all environmental conditions is plotted in
Figure 8. This power curve shows the mean generator power production with the error bar indicating the standard deviations of the mean values. The short spar curve has a good agreement with the deep spar performance. The power production of both the short and deep spar VAWTs increases as the wind speed increases. While the wind speed exceeds the rated speed (14 m/s), the mean power production will be higher than 5 MW but remain approximately a constant value. The cause of this fact is that a PI-based generator torque controller is implemented to maintain an approximately constant generator power when the rated operation point is reached [
10].
3.3. Platform Motion
The platform motion can be normally divided into six degrees of freedom, which includes surge, sway, heave, roll, pitch, and yaw motions. In this paper, the heave is defined in global coordinates with the Z axis along the axial direction of the spar, and the surge is in the X axis which is parallel to the wind and wave direction (
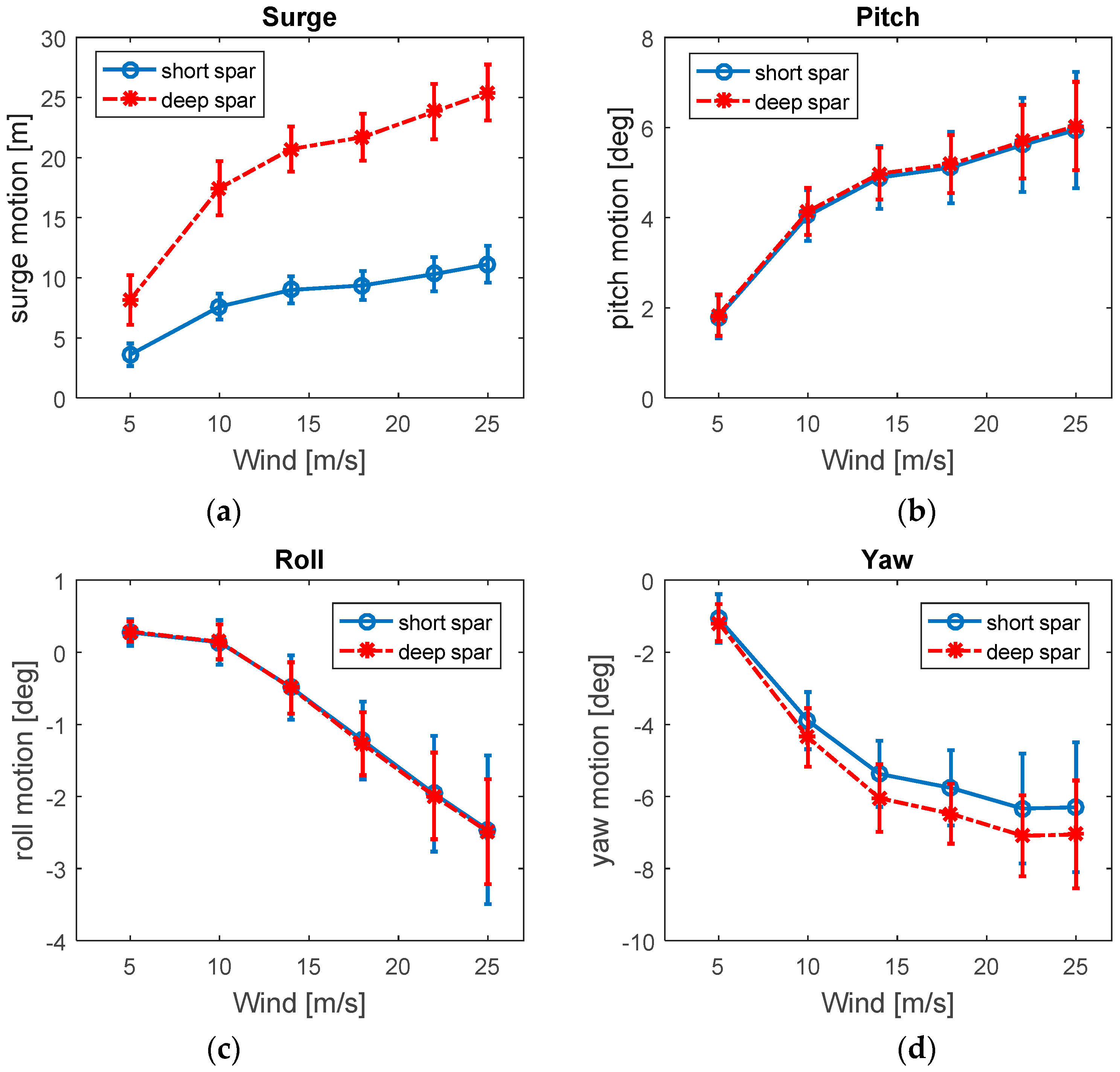
Figure 2). The comparisons of the mean values and standard deviations of the global motions under different environmental conditions between the short and deep spar VAWTs are shown in
Figure 9. Similarly, the mean global motion is shown with error bars indicating the standard deviations of the mean values. Generally, the mean values of the global motions increase as the wind speed increases. Since more powerful wind will cause larger thrust and lateral force (
Figure 7), stronger motions will be easily induced.
In comparing the two models in pitch and roll motions, the mean values of the short spar have good agreement with those of the deep spar. The standard deviations of the short spar are a little larger than those of the deep spar. The mean values and standard deviations of surge motion of the deep spar VAWT are significantly larger than those of the short spar VAWT. Since the surge motions were derived at the mean water level, a lower center of gravity (COG) of the deep spar VAWT with the same pitch angle could lead to larger motion in surge. However, the mean values of the deep spar VAWT in yaw motion give more significant responses than those of the short spar VAWT. This could be the reason that the natural periods of the deep spar VAWT in yaw motion are much closer to the dominating wave energy.
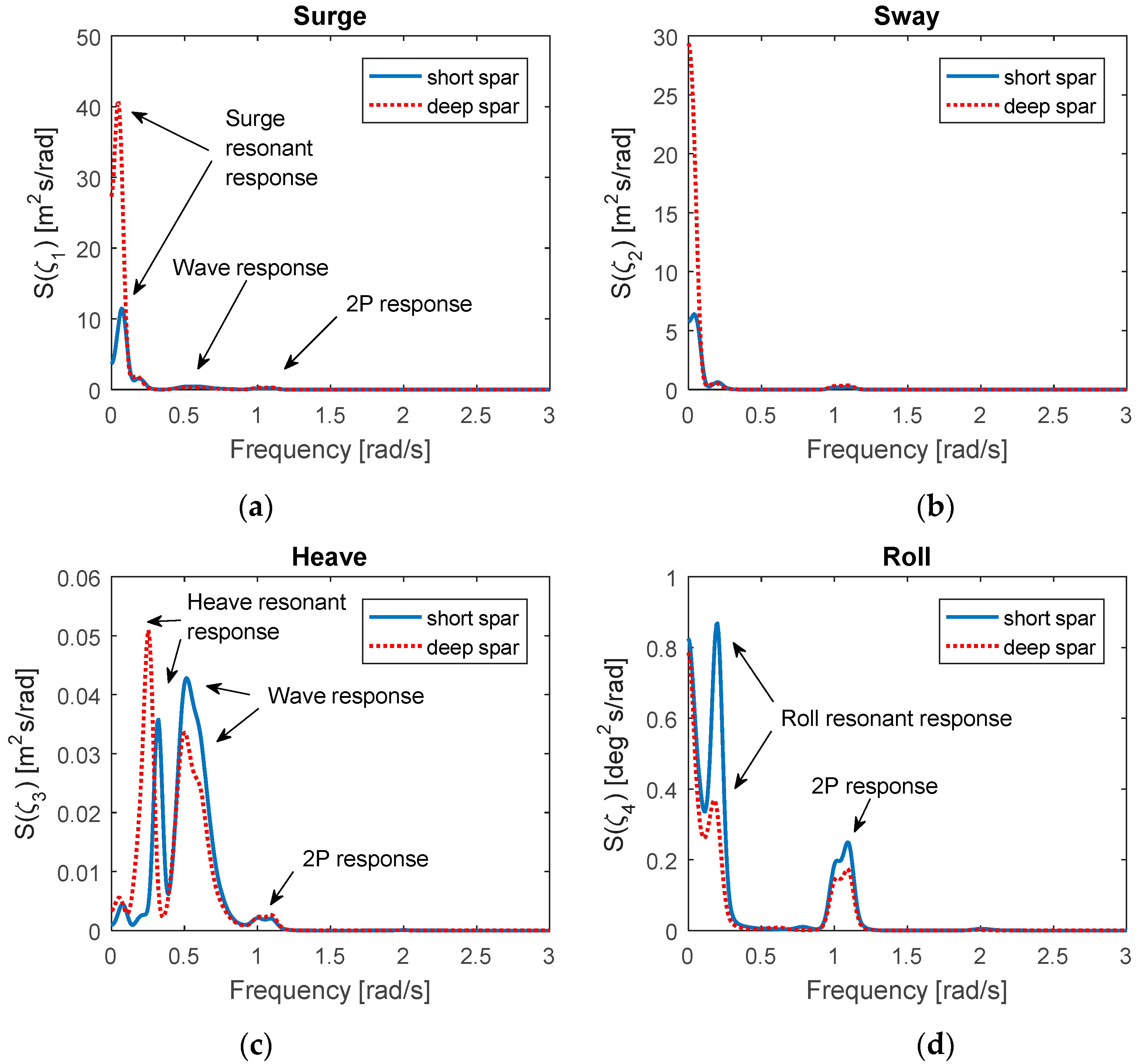
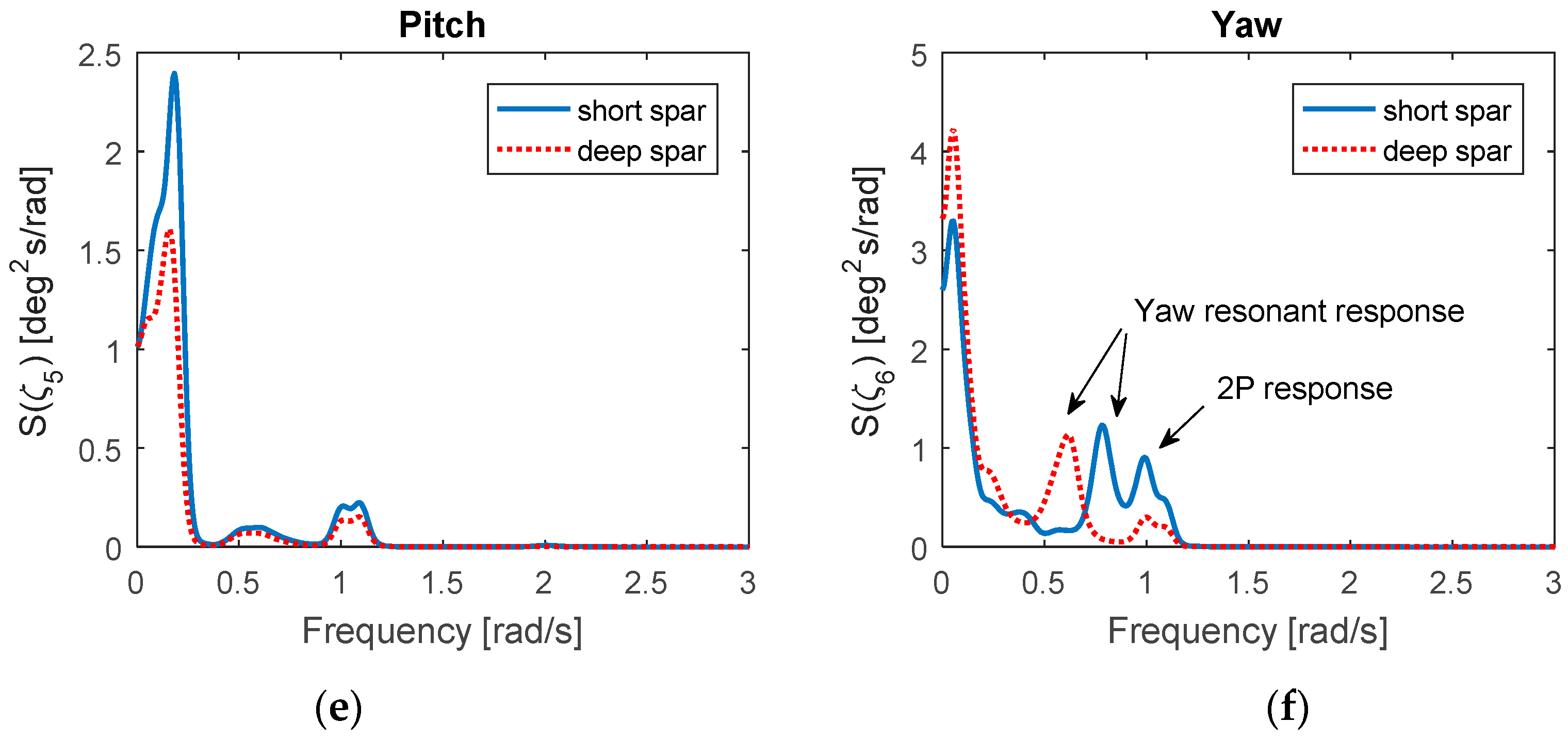
The power spectra are used to analyze the time series of physical motions, which can reveal the frequency contributions in the standard deviation. A parzen window function is of benefit to filter or smooth the variation of the spectra in the frequency domain. The comparison of power spectra in six degrees of freedom between the short and deep spar under rated wind speed (LC3) can be found in
Figure 10. Basically, these dynamic responses are mainly controlled by the resonant frequency, wave frequency, and 2P frequency. The short spar VAWT and deep spar VAWT have similar spectra distribution except in the heave motion. The heave motions of deep spar VAWT are dominated by its resonant response, whereas the wave-frequency-induced heave response is more prominent in the short spar.
In surge and sway motion, the deep spar VAWT has much larger resonant response. Typically, the dynamic response is determined through mass of inertia, damping, and stiffness of the system. The viscous damping terms were considered in both spar VAWT models. Owning to less discrepancy between the added mass of both spar VAWTs in surge/sway, the stiffness term becomes the key factor. Since the longer mooring lines of the deep spar VAWT result in softer restoring stiffness in the horizontal direction, a larger spectrum of surge/sway motions occur. In addition, the dominating spectra values of the short spar VAWT in roll, pitch, and yaw motion are larger than those of the deep spar VAWT. Due to a shorter metacenter height and softer restoring stiffness in roll/pitch, the higher standard deviations and larger spectrum values in roll/pitch motion could be expected from the short spar VAWT.
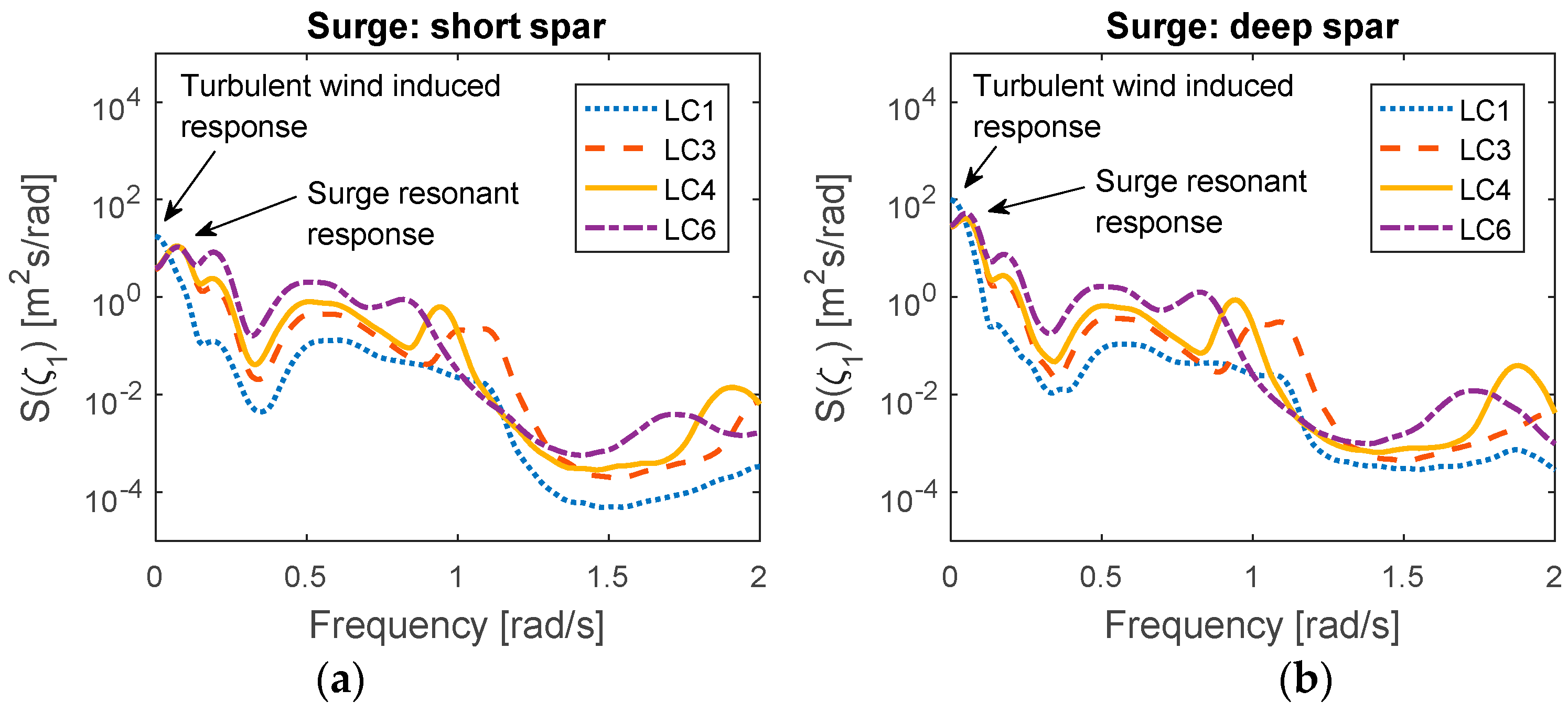
The power spectra of the short and deep spar VAWTs in surge under each environmental loading are plotted in
Figure 11. It can be found that the low frequency induced by turbulent wind responses is dominating when the wind speed is below the rated speed (LC3). The surge resonant response dominates when the wind speed is above the rated speed and is larger than the wave response and 2P response. Overall, the dominating spectra values in the deep spar VAWT are higher than those of the short spar VAWT, and the larger standard deviations of the deep spar in surge motion can also be found in
Figure 9a.
3.4. Tower Base Bending Moments
The tower base bending moment is considered in this study. The bending moment is mainly induced by the aerodynamic force on the rotor and the downward gravity force of its self-weight owing to the tilted tower. The fore–aft and side–side bending moments are important indices to assess the structural performance of the wind turbine, as the aerodynamic forces vary with the azimuthal angle and cause large variation on these bending moments [
9]. The fore–aft is parallel to the wind flow direction, and side–side is perpendicular to the wind flow.
Figure 12 compares the respective mean values, maxima values, and the standard deviations of fore–aft and side–side bending moments for the short and deep spar VAWTs. In this study, the maximum value in each loading case was derived from the mean of maximal numbers for each random seed simulation in the time domain. Overall, the comparison shows a good agreement between the short spar and deep spar. The mean, maximum, and standard deviations of the bending moment in both fore–aft and side–side directions increase as wind velocity increases.
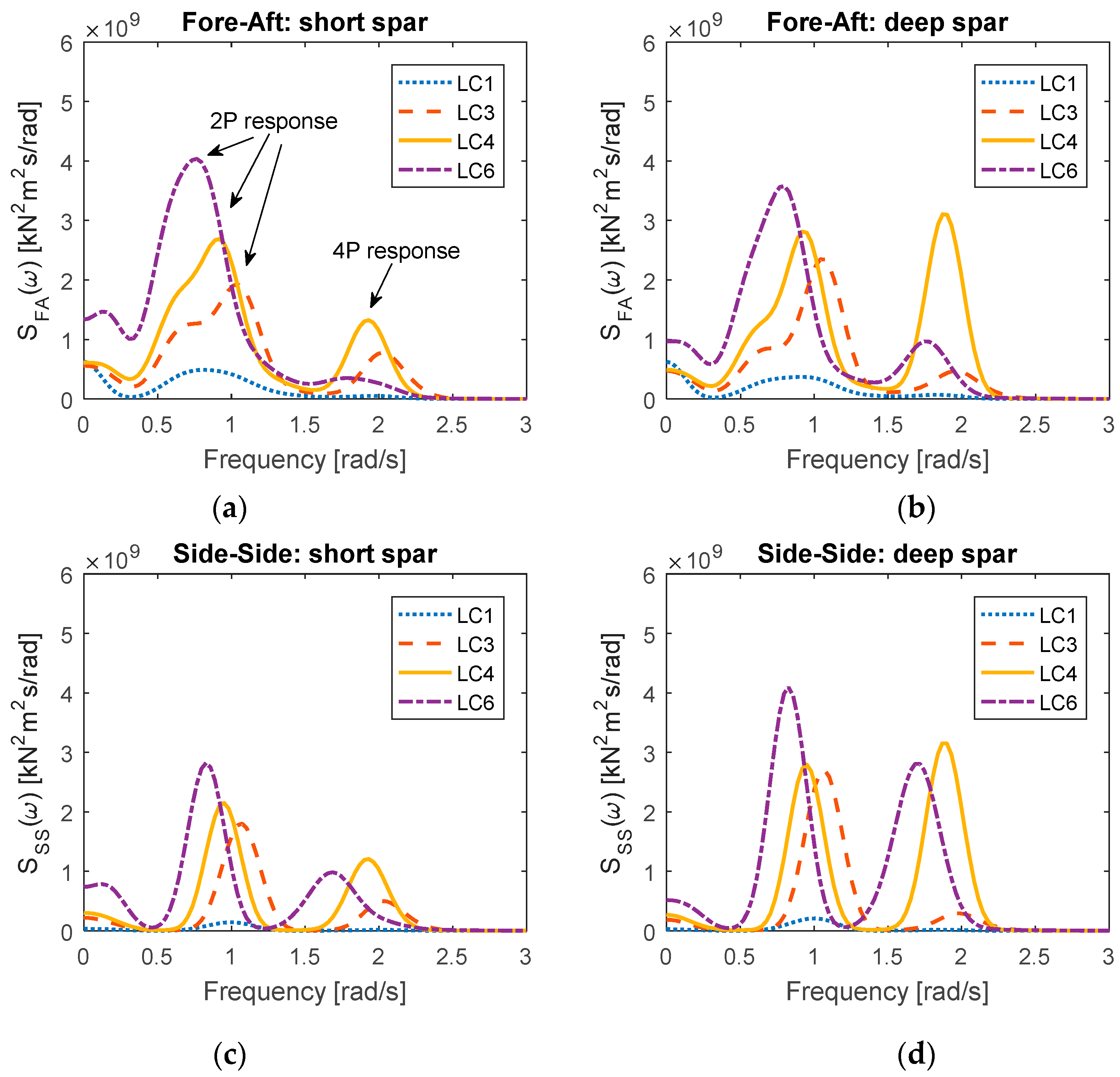
The power spectra of the tower base bending moment under all environmental conditions for the short and deep spar VAWTs are shown in
Figure 13. Whether in the short spar VAWT or the deep spar VAWT, 2P responses are almost dominating for all loading conditions. The response at 4P frequency will become significant when the wind speed is over the rated speed (LC4 to LC6). The excitation may result from the structural resonance at 4P frequency when the environmental condition exceeds loading case LC3. The corresponding maxima spectra values for each loading case increase as wind velocity increases. The 2P responses of the deep spar VAWT in the tower base side–side bending moment are larger than those of the short spar VAWT, as are 2P responses in the tower base fore–aft bending moment for most loading cases. An exception is LC6 with U
w = 25 m/s and H
s = 6.02 m, under which the 2P responses of the short spar VAWT are larger than the corresponding values of the deep spar VAWT in the tower base fore–aft bending moments.
3.5. Mooring Line Tensiion
The catenary mooring system is used for both the short and deep spar VAWTs. The main purpose of the mooring system is to maintain the floater in the proper position, and the delta line can provide yaw stiffness. For a conservative design approach, the turbulent wind and irregular wave are aligned in the same direction (+X global motion) in this study; hence, Mooring Line 1 will have the main role in withstanding most of the external force (
Figure 2). The tension of Mooring Line 1 is measured at the anchor point and is the sum of tension in the upper line, clump mass, and lower line.
Figure 14 presents the mean values, maxima values, and standard deviations of Mooring Line 1 for the short and deep spar VAWTs under all environmental conditions. Generally, the mean, maxima values, and standard deviations increase as the wind speed and significant wave height increase. The mean values of tension for the deep spar VAWT are larger than those of the short spar VAWT, but the maxima values and standard deviations of the deep spar VAWT are smaller.
Figure 15 compares the respective spectra of tension in Mooring Line 1 between the short spar and deep spar VAWTs under all the loading cases. Overall, the distribution of tension spectra in Mooring Line 1 for the short spar VAWT agrees well with that of the deep spar VAWT. The similarity between the short and deep spar VAWTs in the tension spectra is that the dominating wind-induced response increases as the wind speed and irregular wave state increase. However, the dominating spectra values of the short spar VAWT are significantly higher, as are the standard deviations of the tension of Mooring Line 1.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}