Abstract
Dust accumulation on solar photovoltaic (PV) modules reduces light transmission from the outer surfaces to the solar cells reducing photon absorption and thus contributing to performance reduction of PV systems. In regions such as the Middle East where dust is prevalent and rainfall is scarce, remedial measures are needed to reduce such impacts. Currently, various techniques are being employed to address such sand soiling ranging from mechanical (brushing) to active and passive electrical interventions. This research focuses on mechanical approaches encompassing module vibration, air and water jets, and combinations of these. A reconfigurable pilot-scale testbed of 8 kWp PV plant was installed on a carport shading system within the campus of King Abdulaziz University (KAU), Jeddah, Saudi Arabia. The functional PV carport was configured to allow water recovery and re-use within the testbed. Here, we discuss the overall cleaning design philosophy and approach, systems design, and how multiple cleaning configurations can be realised within the overall PV carport. Results indicate that in this location, sand soiling has a significant effect on performance of PV modules on a timescale of days. In addition, water jets optimised for high volume and low pressure were effective at reducing sand soiling with array power output increasing by over 27%, whilst air jets and module vibration were less effective in reducing soiling to an acceptable level. Overall, the testbed has provided a new approach to testing a combination of cleaning solutions in the field coupled with used water recovery. The proposed approach is important, as currently, there are a large number of solar PV projects being built in Saudi Arabia with more being planned for the future.
1. Introduction
The use of solar photovoltaic (PV) systems for electricity production is expanding with over 390 GWp already installed globally [1]. Rapid expansion of PV technology is occurring in sunny areas in countries such as those in the Middle East, Northern Africa, Australia, India, China, Latin America, and the United States of America [1]. Due to the wide availability of solar resource and advancements in conversion technologies, solar energy is fast emerging as a cost-effective source for power generation, with grid parity being achieved in many solar resource-rich countries [1,2].
In solar photovoltaics (PV), the efficiency of the overall system has increased through many improvements in cell efficiency, balance of system, and overall management and control [3]. However, one of the issues outside the scope of such improvements is the effect of environmental conditions, such as the deposition of foreign particles on module surfaces of a solar PV array [4]. This could be sand, salt, bird droppings, snow, etc. Such deposits reduce the light transmission through the glass cover of the modules impacting photon absorption by the solar cells [5,6]. As deposition increases, it results in progressive conversion efficiency losses and hence reduced energy yields from the modules and the overall array [7]. For example, it was shown that in one month the output from an outdoor PV system in Saudi Arabian conditions reduced by over 5% due to dust accumulation [8]. A similar experiment in Abu Dhabi showed a reduction of PV output of around 13% for a similar period [9]. In a review of over eighty recent publications, it was found that the loss in power generation due to dust accumulation on solar PV systems can exceed 40% [10]. Such reduction, which is often quantified by the soiling rate, is found to be strongly affected by four factors: (1) geographic location; (2) physical properties of dust particles, such as size; (3) PV module surface roughness; and (4) weather conditions [11]. Other studies showed that there is a clear difference of particle sizes from sand collected from Saudi Arabia and Iraq, which leads to a different level of soiling rate [12]. Similar observations were made in a study comparing sand samples showing significant difference of particle size from Doha and Namibia [5].
Furthermore, weather conditions such as rainfall frequency, humidity, and wind velocity have been studied to reveal their influence on soiling rate. For example, it was found that long-lasting rains were capable of cleaning dust or dirt off solar panels, but their effectiveness varies heavily among different seasons with observed system performance loss exceeding 20% during dry summer season [13]. Additionally, it was observed that if a sandstorm and rainfall happen simultaneously, then the soiling rate is even greater as the accumulated sand adhered strongly to the panel surface, making the subsequent cleaning more difficult [14]. Further studies on soiling rate in Saudi Arabia, where the deposition of dust varies significantly between seasons from 5 g/m²/month (July) to 28 g/m²/month (August and October) [15], showed significant dust accumulation due to moisture and humidity, particularly from early-morning dews [12,16]. Other studies on the influence of wind velocity on dust accumulation found it to be insignificant [17]. Results of monitoring the characteristics of dust in Jeddah, Saudi Arabia, showed that its composition varied significantly as a function of changes in weather conditions [18]. The concentration of crustal elements (Si, Ca, Na, Al, Fe, K, and Mg) increased from 45% to 68% after dust storm events, indicating the origin of the dust deposited by the storms is largely from non-anthropogenic sources, whereas the reverse is true under normal conditions [18].
Approaches already employed to prevent or remove such deposition vary in terms of technologies and effectiveness. The work in [19] summarised existing cleaning methods into three categories: Mechanical cleaning, passive approaches using coating materials, and electrodynamic screen (EDS) cleaning. Mechanical cleaning systems commonly comprise either brushes or silicone blades, with additional usage of water to improve the cleaning efficiency [4]. Mechanical cleaning systems in real applications will need to be individually adjusted to achieve optimal performance, as the proper level of force and pressure vary among different locations [19]. However, such systems consume a considerable amount of water, which is particularly challenging for desert regions facing water scarcity [20]. In addition, the brush or wiper systems are likely to cause damage to PV panel surfaces, hence performance losses, requiring regular maintenance and high upfront investment [6].
Currently, coating for solar systems uses either super-hydrophobic or hydrophilic material [21,22] with new transparent super-hydrophobic surfaces being designed for better durability [23]. However, although the coating materials are effective as applied, their durability and lifetime still require future validation [6,20]. Similarly, the application of electrodynamic screens has also shown high efficiency in terms of cleaning, but the screens degrade after a period of use and were found to be less effective when the modules were wet [6,24].
In summary, dust deposits can cause significant performance reductions in certain locations and while a number of approaches to cleaning and prevention have been subjected to previous research, there remains a gap for solutions which are both low-maintenance and robust while minimising use of water and energy. This research addresses such issues and delivers a study to understand how modules in an array can be cleaned through sequences of interventions encompassing water jets, air jets, mechanical vibrations, and combinations of these. These interventions are set up on a pilot-scale testbed in Jeddah, Saudi Arabia, that can be remotely operated from anywhere in the world. The aim of the testing is to provide an optimised approach for cleaning solar PV modules that can be scaled up for use in large-scale PV arrays. The following sections provide an indication of the system design philosophy, detailed descriptions of the approaches undertaken, and results achieved.
2. Methodology
The pilot project is situated on the campus of King Abdulaziz University (KAU) in Jeddah, Kingdom of Saudi Arabia (KSA), where, as mentioned above, significant dust deposition and storms can occur, and the background level of soiling is high. The cleaning design philosophy presented here addresses such impacts through a combination of weather and performance event monitoring which will activate the automated cleaning processes. Specifically, the approach encompasses: (1) monitoring the amount of dust deposition on solar systems and the degradation in PV performance, (2) controlling the system in response to commands to operate various cleaning elements either separately or in combination, and (3) investigating the effectiveness of each cleaning intervention.
2.1. Overall System Design Philosophy
As briefly indicated above, the systems developed and implemented were designed to serve as a test bed where different cleaning modes can be tested and their performance determined and compared. The latter is accomplished through observations of improvement, or otherwise of the energy yield as outputs from the cleaned solar PV arrays. In addition to the infrastructure (carport) on which the deployed pilot plant was built, there are three major components incorporated to support cleaning and monitoring. Figure 1 depicts components, consisting of: (1) solar PV array, balance of systems and battery storage; (2) cleaning systems; and (3) remote control and data collection unit. Full descriptions of these systems are given in Section 2.2, Section 2.3, Section 2.4, Section 2.5, Section 2.6, Section 2.7, Section 2.8 and Section 2.9. The whole plant was designed to be remotely managed, monitored, and controlled. This includes the scheduling of different cleaning modes and any combination of these, as well as determining the effect of such tests on array performance. Furthermore, the system can also be operated fully automatically, whilst detailed data are continuously collected and stored in an online cloud storage platform for later analysis (Section 2.8).
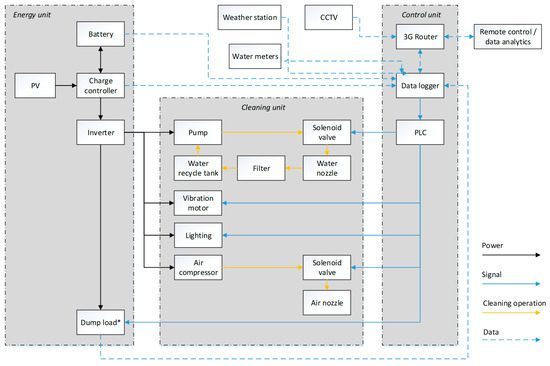
Figure 1.
Schematic diagram of plant components and their connections for array performance, cleaning scheduling, control and monitoring. * Dump load will be used to extend the period for photovoltaic (PV) systems to continue operation. In real applications, dump loads are not needed as PV systems would be grid connected.
The design philosophy was informed by a series of laboratory investigations in which sand samples from the KAU site, Jeddah, west of Saudi Arabia, were used in a laboratory-scale rig containing solar PV modules to simulate the dust soiling and initial cleaning approach. The tests focused on the dislodgement of sand through various interventions, such as vibration, water jets and air jets, and a combination of these (Figure 2). The preliminary results from these tests showed that cleaning methods using vibration, water and air jets were able to reduce sand deposition on PV modules. These gave confidence in the approach and allowed progression to design the larger pilot-scale testbed for experimentation at the site in Jeddah.

Figure 2.
Laboratory-scale cleaning performance test in the UK prior to pilot system design and deployment.
An outdoor car park in the KAU campus was chosen to deploy the developed power plant and the cleaning system and conduct the in situ tests. The car parks areas in KAU represent around 50% of the campus footprint, having considerable potential for contributing to the power demand of the university through deploying PV systems at scale on carports [25].
Some of the components of the plant were pre-assembled into two weatherproof enclosures and pre-tested in the UK to allow rapid installation on site. A weather station and two pairs of CCTV cameras were added to the system to provide weather condition monitoring, visual inspection and monitoring of the environmental conditions and dust build-up on the modules. Figure 3 shows the outline of the pilot plant testbed and position of the various components deployed on a working (functioning) carport.
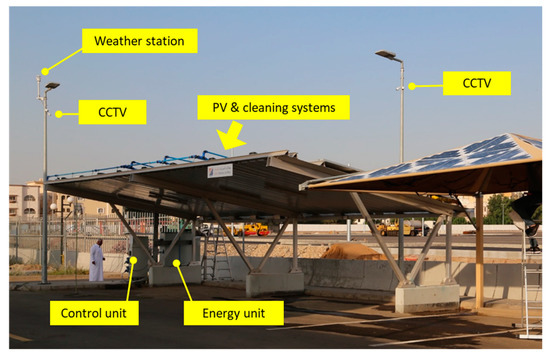
Figure 3.
Outline of the pilot plant testbed and position of the various components deployed on a functioning carport.
2.2. Carport
The carport structure not only provides shading for vehicles but also serves as the base for the solar PV modules, the cleaning systems, and other accessories. The structure, therefore, needs to have a high level of structural integrity, ability to mount solar modules, and flexibility for future modifications. To ease design needs and deployment and provide overall robustness for the plant, a commercial product by Schletter® (schletter-group.com), Park-Sol-B1 (Schletter Solar GmbH, Kirchodorf, Germany), was selected. This consisted of an aluminium roof structure, mounting rails for installing PV panels, cast-in-place concrete foundations (constructed on site), and a steel main structure to support additional loads. The carport is able to accommodate four parked vehicles, occupying a total area of ~65 m² (12.0 × 5.4 m, excluding spaces occupied by the foundations and water tank). Details of the structure as well as some of the systems installed are given in Figure 4.
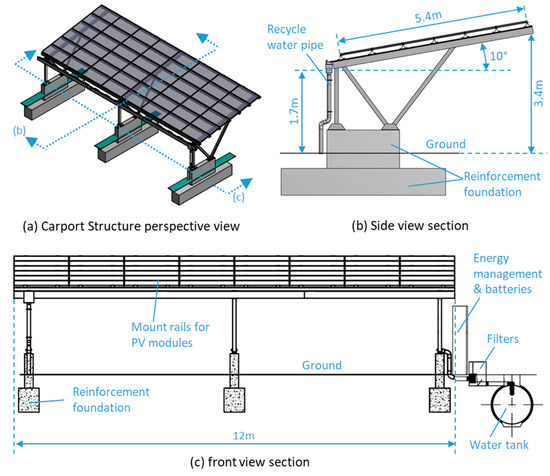
Figure 4.
(a–c) Schematic and dimension of carport structure, foundation, balance of system enclosures, water supply, and recovery system.
The roof of the structure has a 10° inclination, which allows rainwater or water from cleaning to be drained away from solar panels into a collection gutter. The water is collected by aluminium panels fitted under the modules, allowing the water to flow into the gutter installed on the lower end of the roof and then through pipework connected to the underground water storage tank (marked in Figure 4c). Before entering the water storage tank, the water passes through a three-stage water filter unit to remove sand, dust, and debris (not shown in Figure 4c). The water storage and reuse system is discussed further in Section 2.5.
The roof of the carport structure is composed of two main parts. On the top of the roof, six aluminium rails were installed horizontally (Figure 4c), serving as the base where PV modules can be mounted. The space between each rail is around 0.8 m and can be adjusted, allowing the layout of the PV modules to be rearranged, in the future, to accommodate different cleaning systems.
Aluminium sheeting was fitted underneath the mounting rails to provide a weatherproof barrier from sunlight, dust, and as indicated earlier to collect the water used by the different cleaning systems. The sheeting also prevents parked vehicles and passengers from being affected by the cleaning processes.
The total roof space provided by the carport structure is ~65 m² (Figure 4). If fully utilised it could accommodate a PV system with a capacity of up to 11 kWp. However, for our study this roof space area was separated into sections (see Section 2.3) where different cleaning systems can be installed and tested simultaneously. Figure 5 shows the final layout of the array and the carport space utilisation. As can be seen in the figure, buffer zones between sections of each sub-array were created to try to avoid any cross effect of cleaning modes being tested.
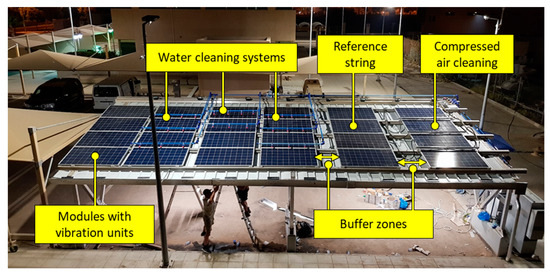
Figure 5.
Layout of the array and the carport space utilisation, showing buffer zones between sections to avoid any cross effect of cleaning modes being tested.
2.3. PV System
The photovoltaic modules used were manufactured by CanadianSolar®, model number CS6K-270P (Canadian Solar, Cambridge, ON, Canada) with a dimension of 1650 × 992 × 40 mm (L × W × D) and a rated power of 275 Wp (Vmp = 31 V, Imp = 8.9 A). Our design consideration indicated that on the site (Jeddah, Saudi Arabia), the typical working module temperature is estimated to be ~60 °C and the irradiance is ~800 W/m2. Under such conditions, each module would have a peak power output of 185 W (at approximately 28 V and 7 A). The PV system consists of 24 modules installed on the carport structure, forming a 6 × 4 array, as shown in Figure 5 and Figure 6. The whole array was configured into eight parallel strings, each of which is composed of three modules that are connected in series, as marked by red lines in Figure 6. Three of the strings: (S-I) A1-A2-A3, (S-V) A4-A5-A6, and (S-III) B2-C2-D2 are used as a control and are not fitted with any of the cleaning systems.
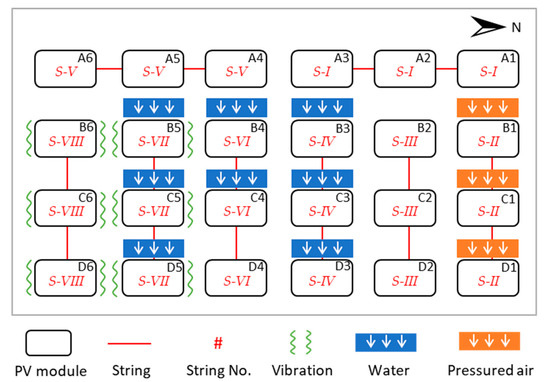
Figure 6.
Layout of solar modules, PV strings and cleaning systems on carport canopy (plan view).
Such a layout provides an appropriate platform to test multiple cleaning modes either individually or simultaneously in combination for specific PV sub-arrays and to compare the outcomes with the performance determined from control strings where no cleaning takes place. For cleaning, eight sets of water nozzles and three sets of pressurised air nozzles (B1, C1, and D1, string S-II) were fitted on top of 11 of the PV modules, as shown in Figure 6, where the arrows marked on the cleaning systems indicate direction of water and airflow. In addition, six modules were also fitted with vibration motors to test the performance of cleaning with vibration only (B6, C6, and D6, S-VIII). The other three modules—B5, C5, and D5 (S-VII)—have both water cleaning and vibration fitted to test the effectiveness of cleaning by combining vibration and water modes.
As shown in Figure 5 and Figure 6, the PV module D4 (in string S-VI), unlike D3 (S-IV), is not fitted with water nozzles. This feature is added to compare water jet cleaning reach where D4 is cleaned through drenching from the nozzle jets on C4. This is implemented to see if this mode is sufficient to clean subsequent modules in an array where huge savings in water use could be gained, especially in large arrays.
2.4. Energy Storage System
In Saudi Arabia, connecting microgeneration, such as PV to the distribution network is currently not straightforward from a regulatory standpoint. A predicate of the design philosophy is that the plant and its systems should be run independently (standalone) and not connected to the mains (grid). Hence, a battery storage unit with charge controllers and an inverter was installed as part of the overall PV system, as shown in Figure 7. Gel batteries (lead acid) were chosen based on their high temperature safety and cost effectiveness for static applications. They have a total capacity of 9.6 kWh (48 V, 200 Ah), providing 24-hour power for all cleaning systems and additional loads, such as data logging, safety lighting, and cameras. The PV modules were separated into two arrays, each containing 12 modules with a rated capacity of 3.3 kW (36 A, 93 V). Each array is then connected to an individual charge controller (45 A, 150 V), which manages the state-of-charge of the batteries. As lead acid batteries are known to be prone to deep discharge, the charge controllers are programmed to maintain the state-of-charge at over 50%.
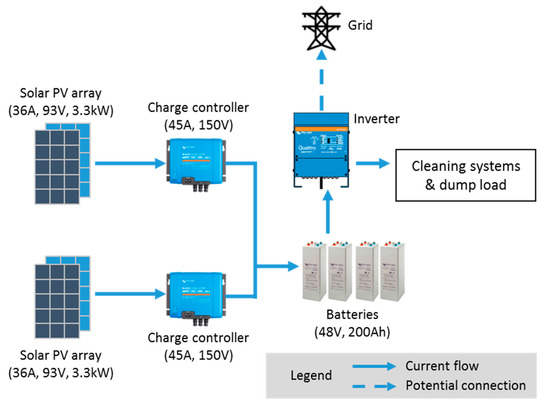
Figure 7.
PV system schematic showing the two sub-arrays, their connection to the balance of systems, and energy storage.
Solar systems installed in car parks are likely to be grid-connected [25]. To facilitate future studies in this area, the project was also designed to allow connectivity to the grid through a multi-purpose inverter—Victron Quattro. This provided the operational functions needed by the design philosophy, as follows:
- Mode 1: System in an off-grid mode: The direct current (DC) from the batteries is inverted to alternating current (AC) to power up the monitoring systems; data logging; cleaning systems, such as the compressor and water pump (see Section 2.5); and dump loads;
- Mode 2: System is in a grid-connected mode where the inverter serves as a grid-tie inverter allowing the metered power output to be directly exported to national grid.
In this presented work, we only consider Mode 1, where the inverter is set to be part of an off-grid system, and the connection to the national grid is temporarily disabled. In order to simulate a grid-like current sink for the PV system, a 4 kW dump load was incorporated to the system. This was programmed to be automatically switched on when the current drops below the optimum, forcing a no disconnect from the charge controllers, so the PV system stays operational to study cleaning modes and their impacts on the energy yield.
In order to quantify PV system performance, the current of each PV string is monitored and measured independently through a series of 6 mΩ shunts (60 mV at 10 A) installed within the system cabinet. In addition, shunts (60 mV at 500 A) were also installed to monitor total PV current and battery charging current. All of the measured data are collected by a data logger and stored in a cloud-based database (see Section 2.8).
The batteries and all energy management devices are contained in a weatherproof enclosure (IP 66), as shown in Figure 8. The enclosure is air conditioned, preventing the electronic devices from overheating. This is particularly important for applications in the Middle East and other tropical regions, where daytime ambient temperature often exceed 40 °C (50 °C on occasion), which may cause damage to electronic components. The air conditioning unit has a rated capacity of 1 kWthmeral, and the temperature set point can be adjusted to maintain the cabinet temperature at a required level.
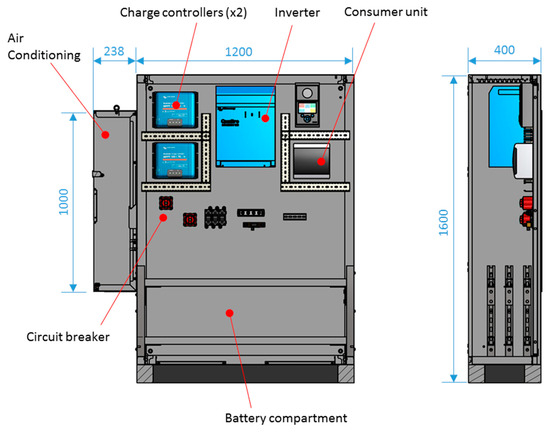
Figure 8.
Enclosure and assembly for energy storage unit showing the layout of the balance of system components and the position of the air conditioning unit.
2.5. Water Cleaning System
As mentioned in Section 2.2, the water-based cleaning systems draw water from a 2 m3 capacity underground water tank. The inspection cap is accessible from above via a manhole cover. Figure 9 shows the connection of components in the water cleaning system. A three-stage water filter unit was fitted between the PV roof downpipe and the water tank. It is composed of three settling basins (1 m³ each) and three replaceable filters, accessible via manhole covers. The filter unit is able to prevent large debris and significantly reduce dust and sand particle ingress into the water storage tank.
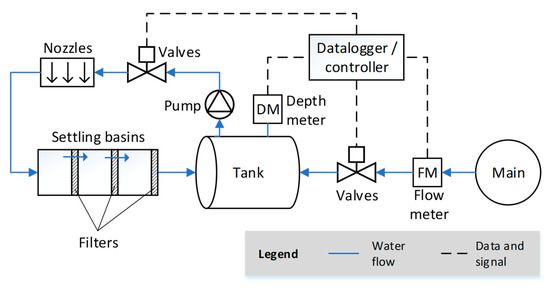
Figure 9.
Connection of elements in water cleaning system.
Within the tank, a pressure sensor was installed to monitor both the loss of water from the cleaning systems and detect any rainfall that may occur. The tank is also connected to the mains water supply, allowing it to be topped up when the water surface drops below a certain level. This drop could be caused by water losses during cleaning or water recollection process, i.e., spray droplets blown away from the canopy, evaporation, and any slight leaks from the guttering and downpipes. A water meter was installed on the main water supply with a magnetic pick-up (1 pulse per 0.25 L) to measure the amount of water that has been added into the tank, reflecting the amount of net water consumption. Both the water depth sensor and water meter are connected to a data logger (see Section 2.8). The data logger is able to collect water depth data and control a solenoid valve, which regulates the amount of water entering the water tank from the main water supply.
Water stored in the underground tank is lifted and pressurized by a self-priming electrical pump, configured to maintain a constant pressure in the pipework, and sprayed out of eight sets of water nozzles, as shown in Figure 10. Each PV module is cleaned by a set of three nozzles (Figure 10), which can be switched on and off by a programmable logic controller (PLC) unit through an electric solenoid valve. The height of the water pipes and nozzles are controlled by a number of supporting studs and are fully adjustable. This feature allows experimentation with nozzle height for effective cleaning as well as determining the impact of water pipe shadows casted on the PV modules. As shown in Figure 10, the cleaning systems on different PV strings are fitted at various heights, facilitating a cross comparison in order to identify the optimal height. The water nozzles can also be adjusted to optimize the spray angle, water volume and pressure. This is part of the design philosophy to study and identify the most efficient method of cleaning for the PV solar systems whilst minimizing energy and resource consumption.
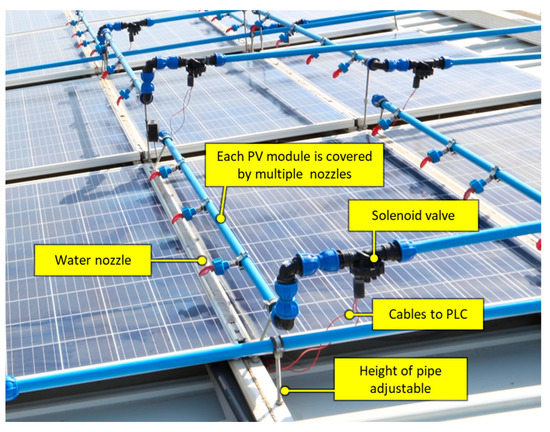
Figure 10.
Cleaning systems on different PV strings fitted with nozzle where height can be varied. The water nozzles can also be adjusted to optimise the spray angle, water volume, and pressure. Note shading on modules due to pipework.
2.6. Air Cleaning System
There is a paucity of information on using pressurized air to clean solar PV modules. To address this, a compressed air knife unit manufactured by Exair Corporation, model number 9078 (Figure 11), was used to provide cleaning for the set of modules highlighted in Figure 6. Each unit has two compressed air inlets, one at each end of the unit, controlled jointly by a solenoid valve and the PLC. The compressed air is then driven through a narrow slot onto the solar modules.
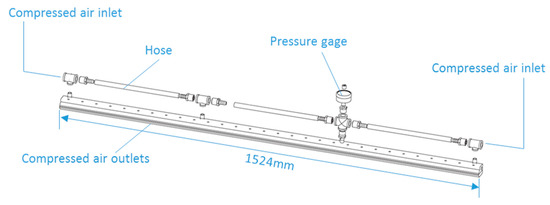
Figure 11.
Main elements in air cleaning nozzles.
For testing purposes, the compressed air for the system was provided by a mobile compressor providing approximately 0.05 m3/s at 7 bar. In the future, this will be replaced by an electrical compressor powered by the PV system, coupled to a large air receiver.
2.7. Module Vibration System
A series of vibration units were fitted into the back of the modules to test the potential of using vibration as a water-free method of cleaning PV modules, as shown in Figure 12. Each unit is composed of a 12 V electric motor and an unbalanced weight, in a waterproof case. Prior to the installation on site, a range of vibration motors were tested in the laboratory trial mentioned earlier, where the performance of the motors at different speeds and weights was tested. It was found that the best motor speed was in the range of 6000 to 8000 RPM, and heavier weights produced stronger motion of sand particles. Moreover, it was also observed that (i) each PV module will require more than three motors working simultaneously to remove dust and (ii) fixing motors loosely enhanced the vibration effect due to the direct hammer impulse of the case striking the panel. As a result, each PV module assigned to vibration test was fitted with five vibration motors, which are installed on the back of the modules (Figure 6). These five motors were mounted at each of the four corners and one in the centre of the module.
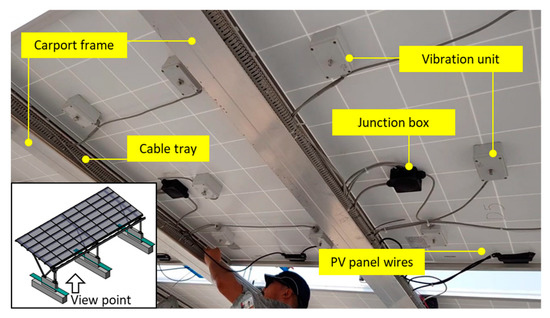
Figure 12.
Configuration of vibration units underneath solar modules.
2.8. Data Acquisition and Control
A Gill Maximet 501® (Gill Instruments Limited, Lymington, UK) weather station (Figure 13) was installed at 6 m above ground level in order to (a) record relevant variables relating to PV performance and dust accumulation and (b) to provide a signal to control the switching on of the dump load when the PV current drops below optimum for given irradiance. The weather variables measured at two-minute intervals include air pressure, temperature, relative humidity, wind speed, wind direction, and irradiance.
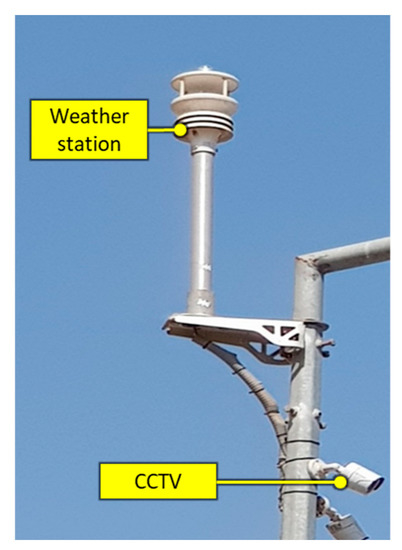
Figure 13.
Weather station and CCTV cameras.
The electrical variables (string currents and voltages), along with the water tank depth and water meter are logged at 1-min intervals by the Datataker® DT85M (Thermo Fisher Scientific Ltd, Waltham, MA, USA) data-logger networked with a Raspberry Pi (Raspberry Pi Foundation, Cambridge, UK), in turn allowing secure two-way communications with a cloud-based server. The weather station communicates with the data-logger over an SDI-12 bus.
In order to visually monitor the system remotely, 4 CCTV cameras with 5-megapixel resolution (Swann Platinum Digital HD, SWNVK-474502, Swann Communications Pty. Ltd., Victoria, Australia), have been installed on the site providing live streaming to the project portal (Figure 3 and Figure 13). The cameras were fixed on two of the car park lampposts (5 m high), allowing a clear visual range for monitoring the PV panels and the carport system. The CCTV cameras were also linked to a digital video recorder (DVR) which is connected to the system router, where images of the carport can be viewed live or played back remotely. The DVR has the capacity of recording views for 80 days onto the 1 TB hard disk. The cameras are able to obtain clear views of the PV and cleaning systems, as well as the functionality of various cleaning methods. In addition to the quantitative measurements and testbed local observations, these networked cameras provide online imagery to allow qualitative comparison of dust build-up on the different sets of PV modules.
2.9. Cleaning System Installation Configuration and Control
Programmed cleaning routines were established encompassing single and multiple intervention combinations, which are controlled through the data logger. In order to detect the effectiveness of the various cleaning modes employed to clean dust build-up on any of the strings (other than the control), the cleaning programs are run on alternate days, as indicated in Table 1.

Table 1.
Initial module cleaning routine. See Figure 5 for layout of PV array.
The operation of cleaning modes can be individually controlled by a programme that is designed to provide flexibility of applying options of cleaning modes—including a manual setup at the control panel. For example, the programme in Figure 14 provides a combination of two cleaning modes (vibration and water jets) for the string S-VII comprising the PV modules B5, C5, and D5. Each vibration pulse lasts 295 seconds (~5 minutes), followed by a water jet pulse of 30 seconds. The sequence of vibration and water jet cleaning is designed to maximise the removal of dust, as the effectiveness of the water jets is enhanced after dust has been mobilised and loosened by vibration. In addition, the cleaning programme is initiated in sequence from top downwards, as shown in Figure 14, where the water jet and vibration pulses for C5 only started after the cycle for B5 was completed.
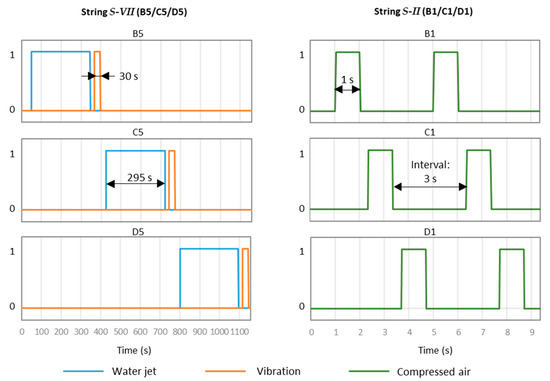
Figure 14.
Example of cleaning programmes on string S-VII (B5/C5/D5) and string S-II (B1/C1/D1).
The compressed air cleaning programme for the string S-II, comprising B1/C1/D1, is also shown in Figure 14. Each compressed air cleaning pulse lasts around 1 second due to the capacity of the compressed air system. The length of compressed air cleaning operations is also chosen by taking into account the complexity of physical processes involved in removing particles from surfaces such as PV modules, which is an active area of research [26]. Particles require a threshold of shear stress before they will move, and this will depend on the micro-level properties of the particles and PV module surface and the level of humidity. The key variable of the effectiveness of the cleaning system is air pressure, but the nature of turbulent and coherent fluctuations in air velocity have also been shown in the literature to have a significant effect on particle removal [26]. The duration of the air pulse is less significant, as air velocities of the order of tens of m/s mean that the time for a particle to cross a PV module, once it has passed the threshold of motion, is extremely short. Therefore, in practice, the duration of the pulse is more likely to be limited by the available air supply and the control system, and longer pulses would be unlikely to improve cleaning effectiveness.
3. Results and Discussion
3.1. Effect of Vibration-Based Cleaning on Power Output
Observation of the performance of the sub-array under vibration cleaning was conducted between 5 and 17 February 2019. Prior to commencing the testing, all PV strings were manually cleaned with water on 5 February to establish a common baseline. In order to determine the effect of vibration-based cleaning, two strings (S-VII and S-VIII, see Figure 6) were subjected to 5 min of vibration, repeated three times weekly, starting on 6 February. The power output from each PV string in the cleaned state is therefore set at 100% as the baseline (index base). The power output measured during subsequent days was compared with this baseline. As shown in Figure 15, the power outputs from the two un-vibrated reference strings, S-V and S-VI, varied from 55% to 132%. The vibration-cleaned strings (S-VII and S-VIII, right of Figure 15) show a similar variation in output from 52% to 136%. Hence, the vibration cleaning did not show any noticeable performance improvements in output as compared with the reference strings. Please note that the string S-VII is equipped with both water-cleaning and vibration units, but during the period shown in Figure 15, only vibration was used to test its cleaning effectiveness.
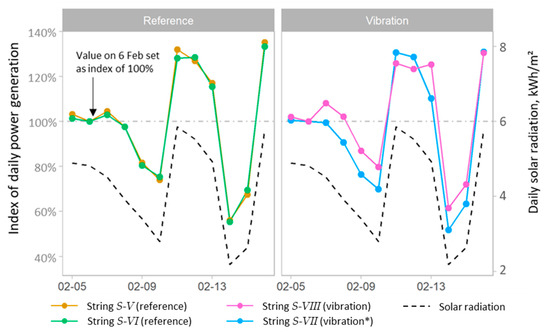
Figure 15.
Index of power production from vibration-cleaned strings (S-XII* and S-XIII) versus reference (un-vibrated) strings (S-V and S-VI). *String S-VII is equipped with both vibration and water cleaning units, but during this period only the vibration was used to test its cleaning efficiency.
In addition, Figure 15 also shows the global solar radiation that was measured by the on-site weather station during the same period. The results show a close correlation with power productions from the solar strings—both cleaned and reference strings.
3.2. Effect of Water-Based Cleaning on Power Output
The PV system is arranged in two sub arrays. For ease of comparison and consistency, we will only consider cleaning of the strings that are connected to the same maximum power point tracker (MPPT), namely strings S-V, S-VI, S-VII, and S-VIII. In order to determine the impact of water cleaning on array output, two strings S-VI and S-VII (see Figure 6) were subjected to water cleaning only during this period. The remaining two strings S-V and S-VIII were considered as reference and were not cleaned. It should be noted that the string S-VIII is regarded here as a reference (non-cleaned) string because no significant effect of the vibration-based cleaning was observed (see Section 3.1).
The water-cleaning programme (Table 1) started on 8 March 2019. Each of the water-cleaned strings was subjected to cleaning three times per week. For each module with water jets fitted, the module was drenched with water for 30 s (as shown in Figure 14). Figure 16 shows the mean power output for 20 days from each string between 08:00 and 09:00 (local time). The figure indicates that before commencing cleaning, the monitored sets of strings (S-V and S-VIII) show similar power output. After water-based cleaning began, there is a clear improvement in the power output from the water-cleaned strings (S-IV, S-VI and S-VII). For the time period selected, the output of cleaned strings was 177 W (on average) compared to 140 W from that of the uncleaned strings (string S-II, S-III, S-V and S-VIII, see Figure 6). This represents around 27% more power from the cleaned strings (standard deviation, SD = 4.4%) over the 20 days compared to the non-cleaned strings.
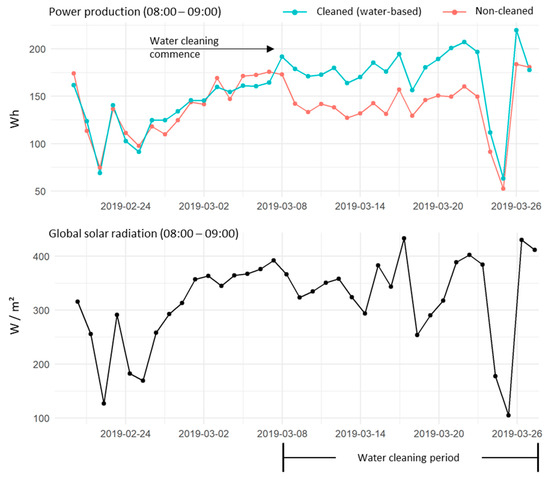
Figure 16.
Difference in array performance between cleaned and non-cleaned sets of panels over a 20-day period. Note all strings were equally soiled before twice-weekly cleaning commenced at the start of the time period (28 March 2019).
The effect of the water cleaning system can also be seen from a visual comparison given in Figure 17, where the side-by-side string S-III (reference) and S-IV (water-cleaned) can be seen in a photo taken in the evening when the water cleaning programme was commenced for the first time on 8 March. The image clearly shows that string S-III was covered by a considerable amount of dust, whereas string S-IV was significantly clearer after water cleaning.
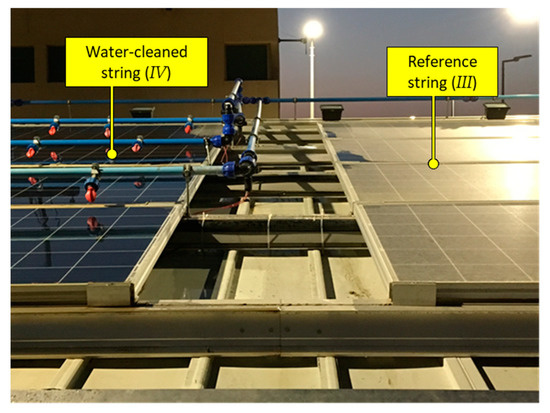
Figure 17.
Visual observation of water-cleaned string (S-VI) versus reference string (S-IV) after first water cleaning programme commenced.
Figure 16 shows the mean power output for 20 days from each string between 08:00 and 09:00 (local time). The figure indicates that before commencing cleaning, the monitored sets of strings (S-V and S-VIII) show similar power output. After water-based cleaning began, there is a clear improvement in the power output from the water-cleaned strings (S-IV, S-VI and S-VII). For the time period selected, the output of cleaned strings was 177 W (on average) compared to 140 W from that of the uncleaned strings (string S-II, S-III, S-V and S-VIII, see Figure 6). This represents around 27% more power from the cleaned strings (SD = 4.4%) over the 20 days compared to the non-cleaned strings.
In Figure 16, the variation of the average solar irradiance was depicted for the same period. The results show that it varied significantly from 105 W/m² (26 March) to 433 W/m² (17 March) and the output from the PV strings strongly correlated with such variations, causing several power production drops, such as on 22 February and 28 March 2019 (Figure 16).
The 08:00 and 09:00 time slot was chosen for analysis, as the battery was never fully charged during this period. The state of charge of the battery in the morning is always depleted due to the air conditioning and other load utilisation during the night. After sunrise, the MPPT ensures that all the strings provide the maximum possible power until the battery state-of-charge recovers to 100%. Consequently, the performance of the strings early in the morning, before the battery has recovered, provides the fairest comparison between cleaned and non-cleaned strings.
3.3. Net Loss of Water During Cleaning
In addition to minimising the loss in PV module performance due to soiling, the other research aim is to minimise the net use of cleaning water. Therefore, it is important to determine accurately the volume of water lost during water-based cleaning modes. In order to achieve this, the filling curve for the water tank was determined by first calibrating the depth (pressure) sensor and then filling the tank (cylinder shape but horizontally-fitted, see Figure 4) from empty, while simultaneously recording the counts from the water meter and the depth given by the pressure sensor. The resulting filling curve is shown in Figure 18 along with a cubic curve-fit to the depth d. A cubic fit was used due to the point of inflection at mid-depth.
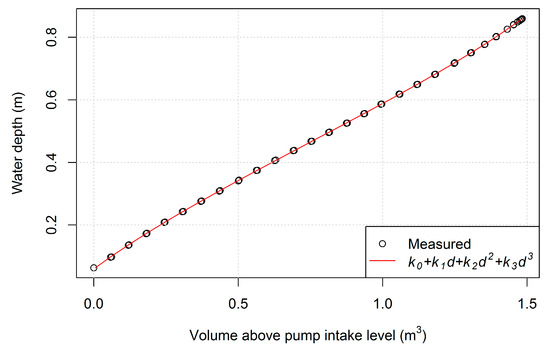
Figure 18.
Filling curve for 2000 L horizontal water tank.
The curve was fitted using the Nonlinear Least Squares (NLS) package in R programme [27,28], giving the four fitted parameters significant at the 0.1% level on 54 degrees of freedom. The four fitted coefficients (k0, k1, k2, k3) were −0.0802, 1.259, 1.692, −1.211, respectively. The curve is now used to calculate volume losses (and gains in the case of rainfall) as a function of depth change. For example, the losses of cleaning water from the different nozzle configurations can be directly calculated. Figure 19 shows the water lost due to a 30 s deluge of water of module B4 followed immediately by a 30 s deluge of module C4 (Figure 6). The figure indicates that the final loss was approximately 9 L.
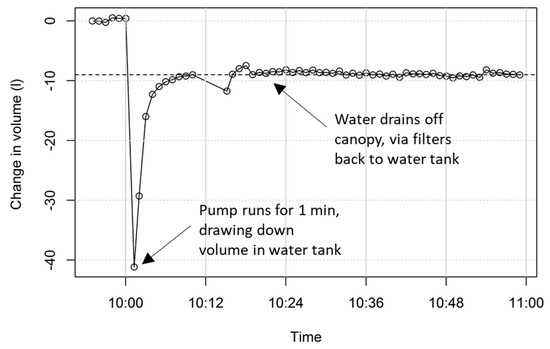
Figure 19.
Loss of cleaning water from the water-based system due to 60 s deluge for modules B4 and C4 (Figure 6).
3.4. Economic Analysis
The success or otherwise of cleaning systems for PV carports will depend on whether, and how quickly, they can pay back the extra investment required for the system through reduced loss of electrical generation income due to soiling. Here we present a simple yet reasonable analysis of a 100 kW production system, grid-connected, with water-based cleaning on all modules.
The rate at which the cleaning system pays back the investment required is clearly very dependent on the value of electricity exported to the grid. Here we have assumed that the export tariff will be equivalent to the commercial import rate [29]. This is reasonable as it is likely that carport PV arrays will be installed in extensive car parks of large buildings, and the generation from the system will directly displace some of the air-conditioning load from the building or buildings. In addition, the cost of water was taken as the standard commercial rate in the Jeddah area [29]. The reduction in efficiency of the soiled panels was taken as 20% based on the results presented in Section 3.2 and the rate of water loss per module per cleaning event of 5 L (based on Section 3.3). Both of these are likely to be conservative estimates, as optimization of the system is yet to be carried out. As cumulative installed capacity increases, it would be expected that installed costs would decrease, typically along an “experience curve” [30]. The parameter b for the experience curve was taken as a conservative 0.9, implying a 10% decrease in installed cost for each doubling of production. The base unit of production was a notional 100 kW system and the present value calculations made at four cumulative levels of experience, 100 kW, 1 MW, 10 MW, and 100 MW. Installed equipment costs for the 100 kW unit were estimated from the experience of the 6 kWp system described in this article with the discount rate assumed to be 10%. More details of the assumptions made for the analysis are provided in Table A1 in Appendix A.
Table 2 shows that for the case of the first 100 kW unit, the net present value (NPV) is positive after five years. However, after ten units, this reduces to four years; after 100 units, three years and after 1000 units, two years. This would imply that the water-based PV module cleaning system is worth the investment providing it is installed at scale.
Table 2.
Net present value analysis for the cleaning system of a notional 100 kW PV carport at different points on the experience curve. All values in USD. Please see Appendix A for more details of the assumptions made for the analysis.
4. Summary and Future Work
This work reported on the design philosophy for an automated cleaning system for PV modules subjected to the harsh desert environment of Saudi Arabia. The system is based on multiple cleaning mechanisms including vibration, air and water, and some combinations of these. The system was equipped to collect the cleaning water for subsequent reuse and installed on a carport canopy in the campus of King Abdulaziz University, Jeddah, Saudi Arabia. The overall system was established as a testbed to investigate the performance of various cleaning systems that were designed to remove dust from solar PV modules.
To allow performance analysis of PV power output, eight individually instrumented PV strings in the array were monitored with multiple cleaning methods tested during the same time period. The effectiveness of each cleaning mode was measured in terms of the amount of power produced in comparison with reference strings (control) of PV modules. The results indicate that for water-cleaning mode only, string power output increased by an average of 27% (Figure 16) compared to non-cleaned, but otherwise identical, strings for the same period of time.
The vibration cleaning mode was not observed to have a significant effect on the performance degradation due to soiling versus the reference panels. The compressed air was not able to be fully trialled due to the use of the temporary air compressor, which did not provide enough continuous air capacity to undertake longer testing. A new air system is currently being designed with further cleaning mode combinations, which will be tested in the future.
Overall, the testbed has provided a new approach to testing a combination of cleaning solutions in the field. Its aim is to identify appropriate combination of cleaning modes to inform the ongoing expansion of PV projects currently being built or planned for the future in Saudi Arabia. These studies will provide the evidence needed to support yield optimisation in large PV arrays through quantifying the efficiency improvements from the cleaning approaches. Furthermore, the testbed has the capacity for additional cleaning units to be added, allowing four more cleaning methods to be tested. These include using blades or PV module surface coatings, integrated pipework and air jets, and new vibration systems. The testbed is providing opportunities for studies of optimised cleaning approaches of solar PV arrays and comparing their performance under the Saudi/Middle Eastern weather conditions, such as sandstorms and humidity. The configuration of the setup and parameters used for the system will be further tested and optimised to identify approaches that would improve dust removal effectiveness and efficiency.
To extend the scope of cleaning mechanisms, more cleaning methods will be tested on the developed solar system to conduct further assessments. This would include (1) combination of vibration and pressurized air, (2) electrostatic dust removal systems, and (3) nanofilm coating. The feasibility of installing additional monitoring equipment, such as high-frequency wind velocity monitoring and visual inspection system to quantify and compare dust soiling, will also be investigated.
Author Contributions
The authors contributed equally to the paper including design, implementation, data gathering, modelling, analysis, and discussion of the outcomes. More specifically, A.S.A. led the KSA side of the research project, obtained essential research data, KAU campus analysis, permissions, coordination of the local contractors and budgeting and design; A.S.B. led the UK side of the project and managed the coordination and the overall design of the project including jointly supervising the various stages of project development, installation and analysis; L.S.B. led the design and configuration of data collection and control systems; Y.W. undertook cleaning system design and data analysis. All authors contributed to the writing, proof reading, and revision of the manuscript.
Funding
This work is part of the activities of King Salman bin Abdulaziz Chair for Energy research at King Abdulaziz University (KAU), KSA. Funding for this collaborative project was provided by King Salman bin Abdulaziz Chair for Energy research, the Vice Presidency for Projects at King Abdulaziz University, and the Energy and Climate Change Division and the Sustainable Energy Research Group at the University of Southampton, UK, (www.energy.soton.ac.uk).
Acknowledgments
The authors would like to acknowledge the contribution of the UK industrial partners represented by David Marriott and his team at Clarke Construction Essex Limited, and David Saunders from Seriatim Ltd and to thank them for their dedication and effort during the design, testing, construction and commissioning stages of the solar PV carport and its various systems.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Table A1.
Economic analysis parameters used in Section 3.4.
Table A1.
Economic analysis parameters used in Section 3.4.
| Parameters | Unit | Value |
|---|---|---|
| Basic Parameters | ||
| Discount rate | percent | 10.0 |
| Cleaned efficiency | percent | 12.0 |
| Drop in efficiency due to soiling | percent | 20.0 |
| Cleaning events per module per week | - | 3 |
| Export tariff | USD/kWh | 0.049 |
| Average irradiance (in plane) | kWh/m2/day | 6.70 |
| Loss of water per cleaning event | L/module | 5.0 |
| Annual maintenance cost (% of equipment cost) | Percent | 2.0 |
| Installed capacity | kWp | 100.0 |
| Power consumption per cleaning event | kWh/module | 0.010 |
| Module capacity | Wp | 275 |
| Module area | m2 | 1.64 |
| Experience curve parameter b | - | 0.9 |
| Equipment Costs | ||
| Pump | USD | 1000 |
| Water tank | USD | 2000 |
| Filters | USD | 1000 |
| Control system | USD | 5000 |
| Pipework, fittings and gutter | USD/module | 50.00 |
| Consumables | ||
| Make-up water | USD/L | 0.00228 |
| Power consumption | USD/kWh | 0.0486 |
| Calculated Values | ||
| Number of modules | - | 364 |
| Water use per year | L | 283,920 |
| Power consumed (at night) | kWh | 568 |
| Increase in generation | kWh | 174,962 |
| Extra generation income | USD | 8503 |
| Water cost | USD | 649 |
| Power cost | USD | 28 |
References
- International Renewable Energy Agency (IRENA). Renewable capacity statistics 2018; International Renewable Energy Agency: Abu Dhabi, UAE, 2018; ISBN 9789295111905. [Google Scholar]
- Masson, G.; Orlandi, S.; Becquerel Institute. Global Market Outlook for Solar Power 2015–2019. Available online: https://resources.solarbusinesshub.com/images/reports/104.pdf (accessed on 29 July 2109).
- National Renewable Energy Laboratory (NREL). Solar Cell Record Efficiency Chart 2018; National Renewable Energy Laboratory: Golden, CO, USA, 2018.
- Ashley, T.; Carrizosa, E.; Fernández-cara, E. Heliostat field cleaning scheduling for Solar Power Tower plants: A heuristic approach. Appl. Energy 2019, 235, 653–660. [Google Scholar] [CrossRef]
- Kawamoto, H.; Guo, B. Improvement of an electrostatic cleaning system for removal of dust from solar panels. J. Electrostat. 2018, 91, 28–33. [Google Scholar] [CrossRef]
- Deb, D.; Brahmbhatt, N.L. Review of yield increase of solar panels through soiling prevention, and a proposed water-free automated cleaning solution. Renew. Sustain. Energy Rev. 2018, 82, 3306–3313. [Google Scholar] [CrossRef]
- Ba, H.T.; Cholette, M.E.; Wang, R.; Borghesani, P.; Ma, L.; Steinberg, T.A. Optimal condition-based cleaning of solar power collectors. Sol. Energy 2017, 157, 762–777. [Google Scholar]
- Rehman, S.; El-Amin, I. Performance evaluation of an off-grid photovoltaic system in Saudi Arabia. Energy 2012, 46, 451–458. [Google Scholar] [CrossRef]
- Al Hanai, T.; Hashim, R.B.; El Chaar, L.; Lamont, L.A. Environmental effects on a grid connected 900 W photovoltaic thin-film amorphous silicon system. Renew. Energy 2011, 36, 2615–2622. [Google Scholar] [CrossRef]
- Saidan, M.; Albaali, A.G.; Alasis, E.; Kaldellis, J.K. Experimental study on the effect of dust deposition on solar photovoltaic panels in desert environment. Renew. Energy 2016, 92, 499–505. [Google Scholar] [CrossRef]
- Maghami, M.R.; Hizam, H.; Gomes, C.; Radzi, M.A.; Rezadad, M.I.; Hajighorbani, S. Power loss due to soiling on solar panel: A review. Renew. Sustain. Energy Rev. 2016, 59, 1307–1316. [Google Scholar] [CrossRef]
- Kazmerski, L.L.; Al Jardan, M.; Al Jnoobi, Y.; Al Shaya, Y.; John, J.J. Ashes to ashes, dust to dust: Averting a potential showstopper for solar photovoltaics. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014. [Google Scholar]
- Kymakis, E.; Kalykakis, S.; Papazoglou, T.M. Performance analysis of a grid connected photovoltaic park on the island of Crete. Energy Convers. Manag. 2009, 50, 433–438. [Google Scholar] [CrossRef]
- Kawamoto, H.; Shibata, T. Electrostatic cleaning system for removal of sand from solar panels. J. Electrostat. 2015, 73, 65–70. [Google Scholar] [CrossRef]
- Engelbrecht, J.P.; Stenchikov, G.; Jish Prakash, P.; Lersch, T.; Anisimov, A.; Shevchenko, I. Physical and chemical properties of deposited airborne particulates over the Arabian Red Sea coastal plain. Atmos. Chem. Phys. 2017, 17, 11467–11490. [Google Scholar] [CrossRef]
- Parrott, B.; Zanini, P.C.; Shehri, A.; Kotsovos, K.; Gereige, I. Automated, robotic dry-cleaning of solar panels in Thuwal, Saudi Arabia using a silicone rubber brush. Sol. Energy 2018, 171, 526–533. [Google Scholar] [CrossRef]
- Jiang, Y.; Lu, L.; Lu, H. A novel model to estimate the cleaning frequency for dirty solar photovoltaic ( PV ) modules in desert environment. Sol. Energy 2016, 140, 236–240. [Google Scholar] [CrossRef]
- Alghamdi, M.A.; Almazroui, M.; Shamy, M.; Redal, M.A.; Alkhalaf, A.K.; Hussein, M.A.; Khoder, M.I. Characterization and elemental composition of atmospheric aerosol loads during springtime dust storm in western Saudi Arabia. Aerosol Air Qual. Res. 2015, 15, 440–453. [Google Scholar] [CrossRef]
- Lu, X.; Zhang, Q.; Hu, J. A linear piezoelectric actuator based solar panel cleaning system. Energy 2013, 60, 401–406. [Google Scholar] [CrossRef]
- Sarver, T.; Al-Qaraghuli, A.; Kazmerski, L.L. A comprehensive review of the impact of dust on the use of solar energy: History, investigations, results, literature, and mitigation approaches. Renew. Sustain. Energy Rev. 2013, 22, 698–733. [Google Scholar] [CrossRef]
- Wendlandt, S.; Berthold, R.; Stegemann, B.; Suchaneck, O.; Hanusch, M.; Drobisch, A.; Berghold, J.; Schoppa, M.; Krauter, S.; Grunow, P.; et al. Spatiotemporal Model for Dust Impact and Mitigation for Solar PV Using Saudi Arabia as a Case Study. In Proceedings of the 31st European Photovoltaic Solar Energy Conference and Exhibition, Hamburg, Germany, 14–18 September 2015; pp. 2477–2481. [Google Scholar]
- Latthe, S.S.; Sutar, R.S.; Kodag, V.S.; Bhosale, A.K.; Kumar, A.M. Progress in Organic Coatings Self – cleaning superhydrophobic coatings: Potential industrial applications. Prog. Org. Coat. 2019, 128, 52–58. [Google Scholar] [CrossRef]
- Zhi, J.; Zhang, L. Applied Surface Science Durable superhydrophobic surface with highly antire fl ective and self- cleaning properties for the glass covers of solar cells. Appl. Surf. Sci. 2018, 454, 239–248. [Google Scholar] [CrossRef]
- Costa, S.C.S.; Diniz, A.S.A.C.; Kazmerski, L.L. Dust and soiling issues and impacts relating to solar energy systems: Literature review update for 2012-2015. Renew. Sustain. Energy Rev. 2016, 63, 33–61. [Google Scholar] [CrossRef]
- Alghamdi, A.; Bahaj, A.; Wu, Y. Assessment of Large Scale Photovoltaic Power Generation from Carport Canopies. Energies 2017, 10, 686. [Google Scholar] [CrossRef]
- Du, X.; Jiang, F.; Liu, E.; Wu, C.; Ghorbel, F.H. Turbulent air flow dust particle removal from solar panel surface: Analysis and experiment. J. Aerosol Sci. 2019, 130, 32–44. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing. Available online: https://www.r-project.org (accessed on 29 July 2019).
- Nash, J.C. nlsr: Functions for Nonlinear Least Squares Solutions. Available online: https://cran.r-project.org/package=nlsr (accessed on 29 July 2019).
- Saudi Authority for Industrial Cities and Technology Zones (MODON) Cost of Industry. 2017. Available online: https://www.modon.gov.sa/en/CustomerService/Pages/cost_of_industry.aspx#tab-1 (accessed on 29 July 2019).
- Delionback, L.M. Guidelines for Application of Learning/Cost Improvement Curves. J. Cost Estim. 1979, 9, 14–33. [Google Scholar] [CrossRef]



















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).