Cranking Capability Estimation Algorithm Based on Modeling and Online Update of Model Parameters for Li-Ion SLI Batteries


Abstract
:1. Introduction
2. Equivalent Circuit Model for SOF Estimation
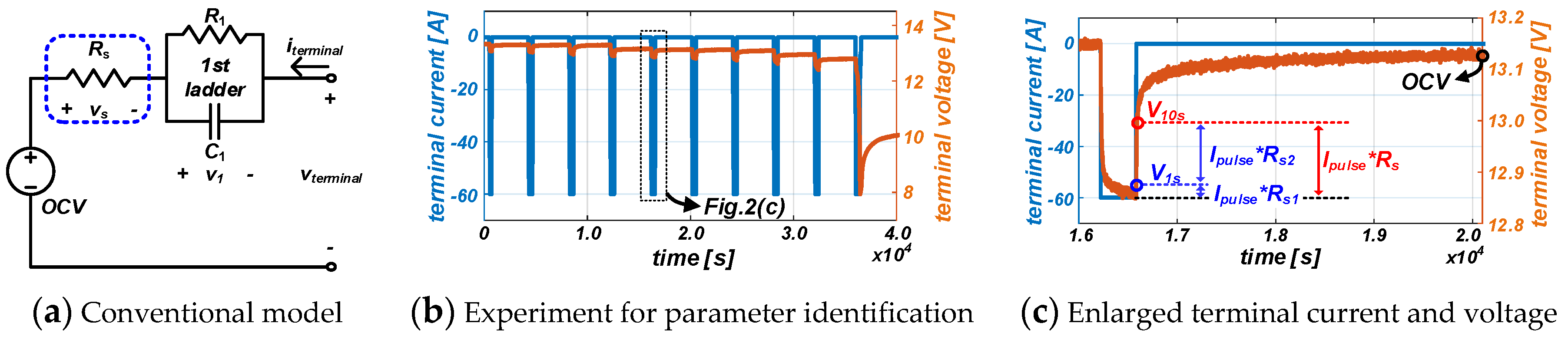
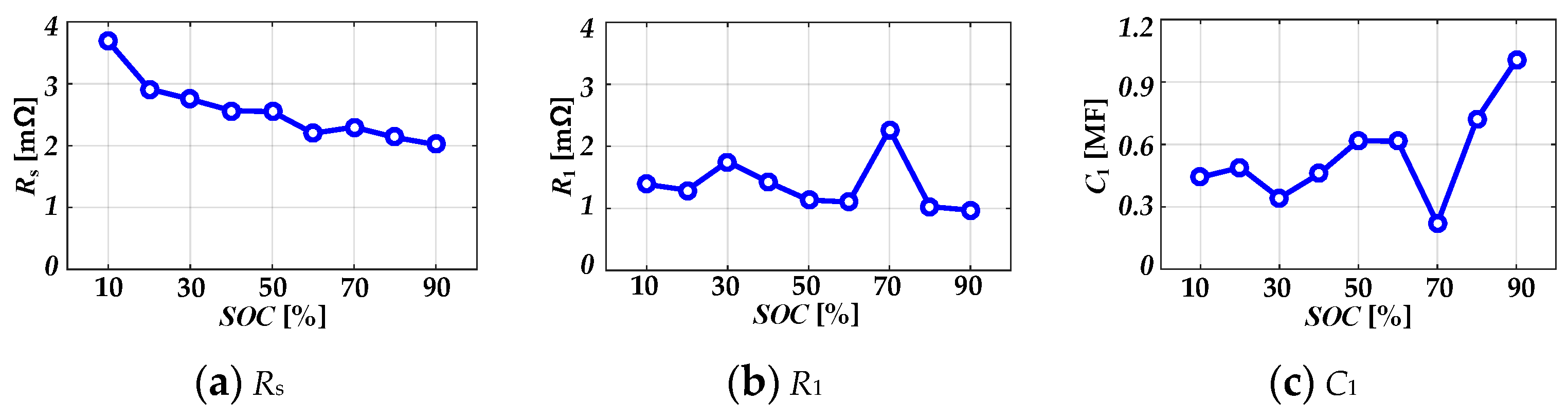
2.1. Conventional Model Based on 1st RC-Ladder
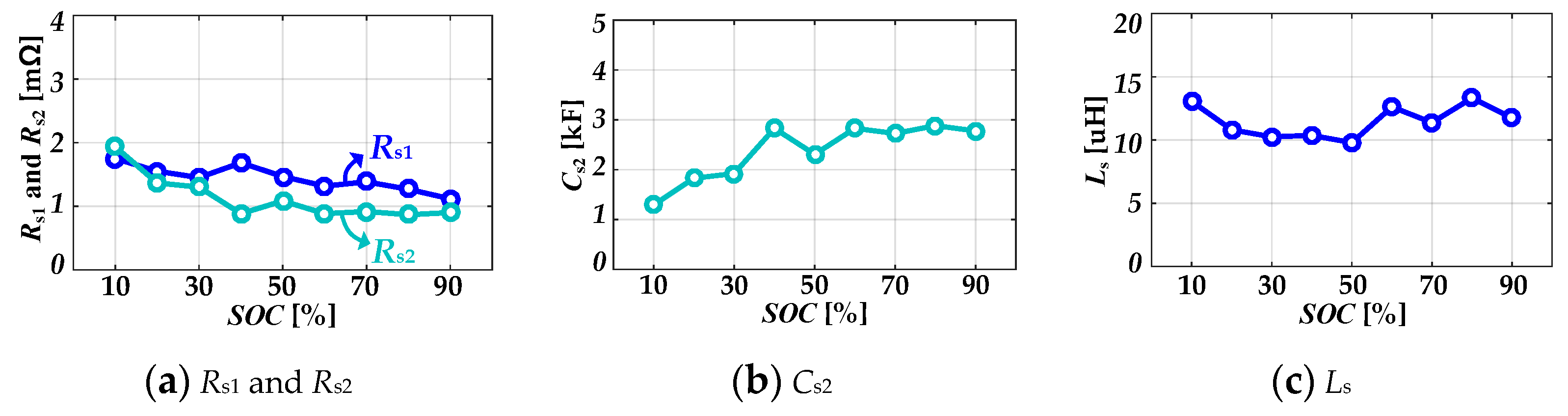
2.2. Proposed Equivalent Circuit Model for SOF Estimation
3. Proposed SOF Estimation Algorithm with Online Update of ECM Parameters
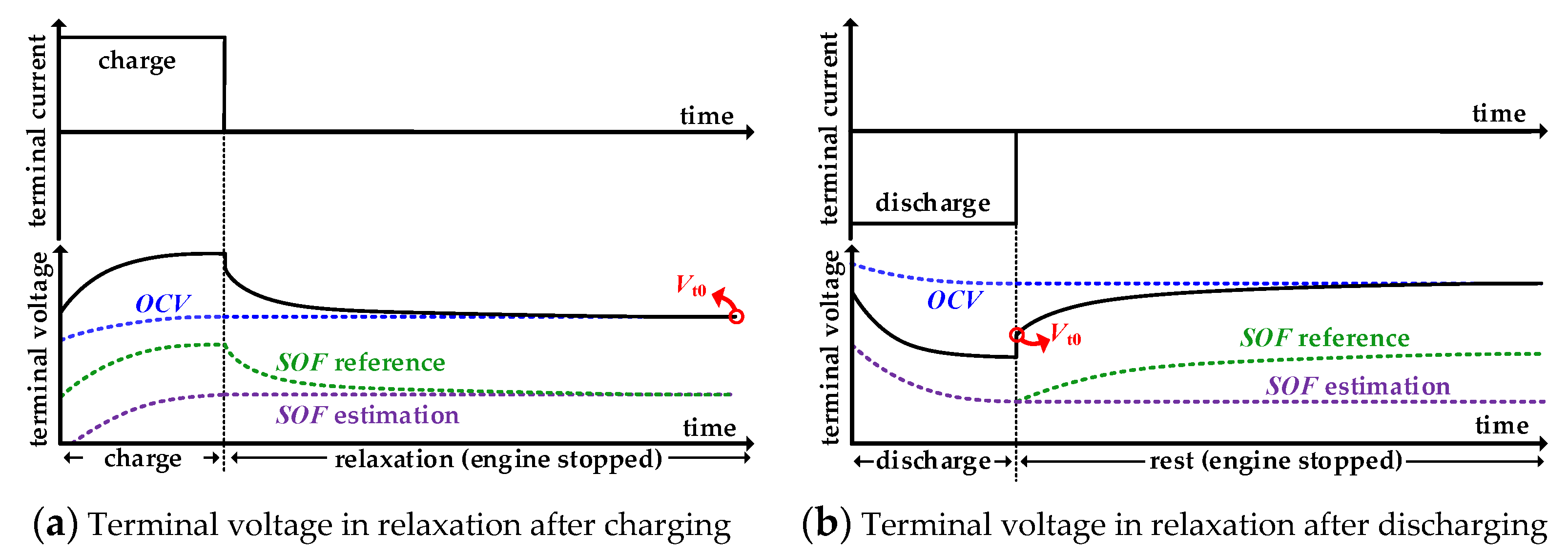
3.1. Prediction of Vt0 Considering Polarization Voltage
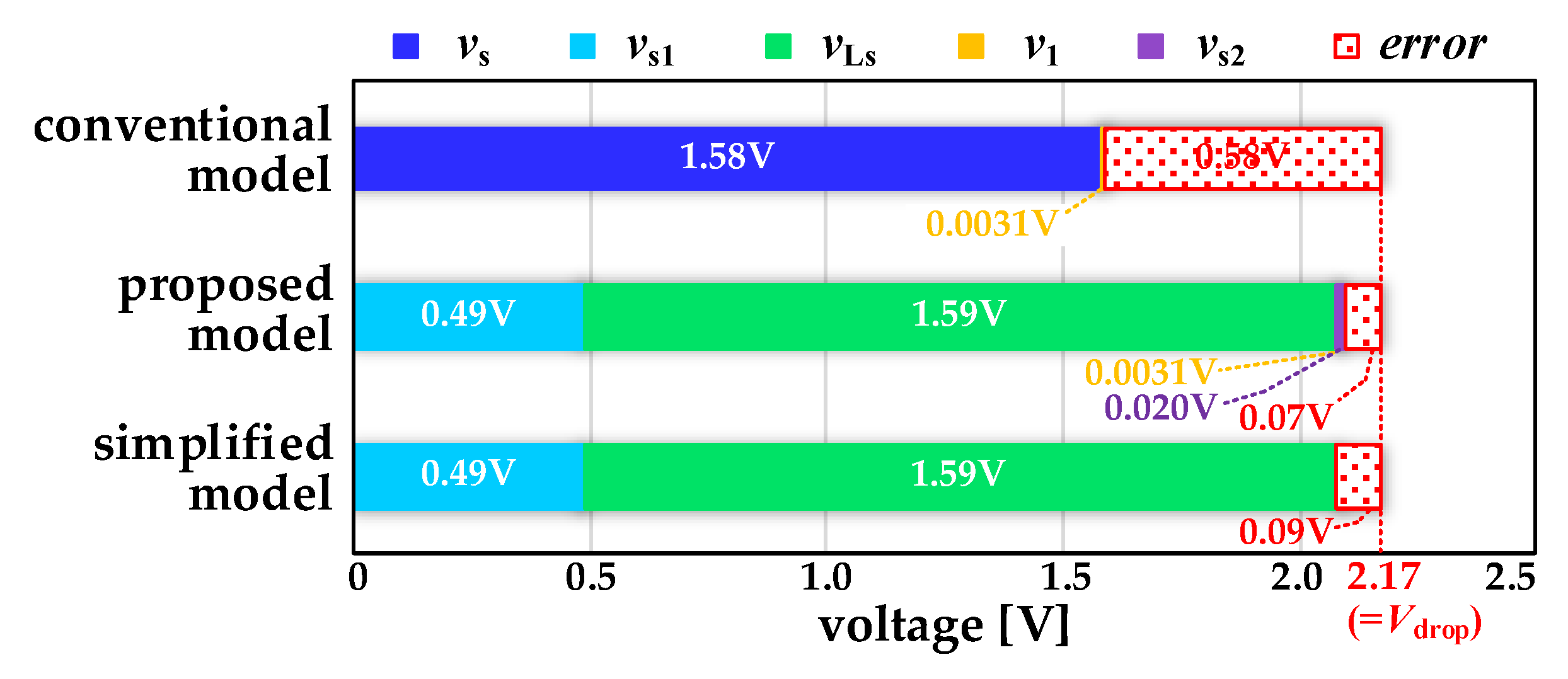
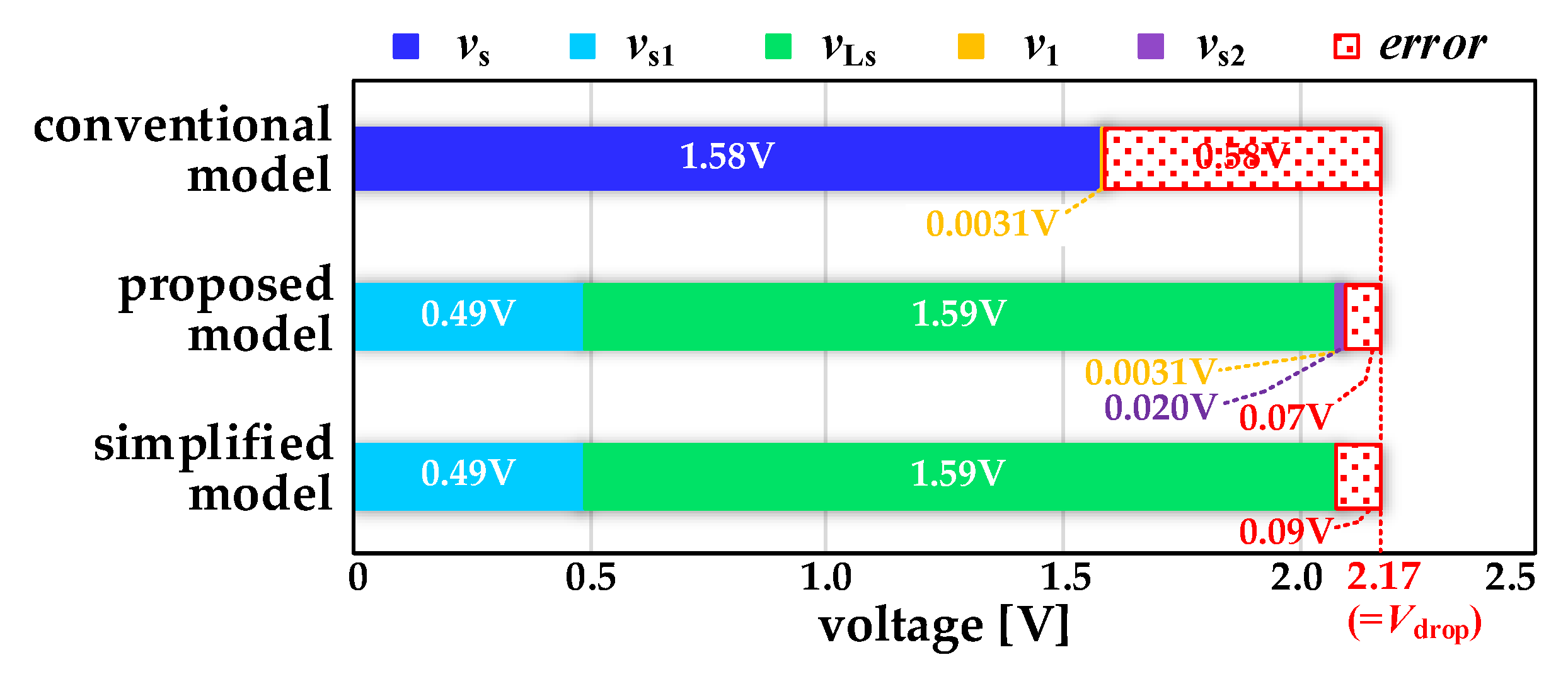
3.2. Vdrop Estimation Using ECM and Simplified Cranking Current Profile
3.3. Online Update through Analysis of Dynamic Characteristic of ECM Parameters
- (1)
- Record iterminal, ∆iterminal, and vterminal during two consecutive sampling sequences, tk−1 and tk.
- (2)
- Assume that OCV is given, and the changes in Rs1 and Ls for these sequences (∆ts) are negligible.
- (3)
- Calculate the sum of vs1 and vLs at tk−1 and tk usingand
- (4)
- Express Equations (16) and (17) through Rs1 and LS as follows:and
- (5)
- Calculate Rs1(tk) and Ls(tk) by solving a simultaneous equation between Equations (18) and (19).
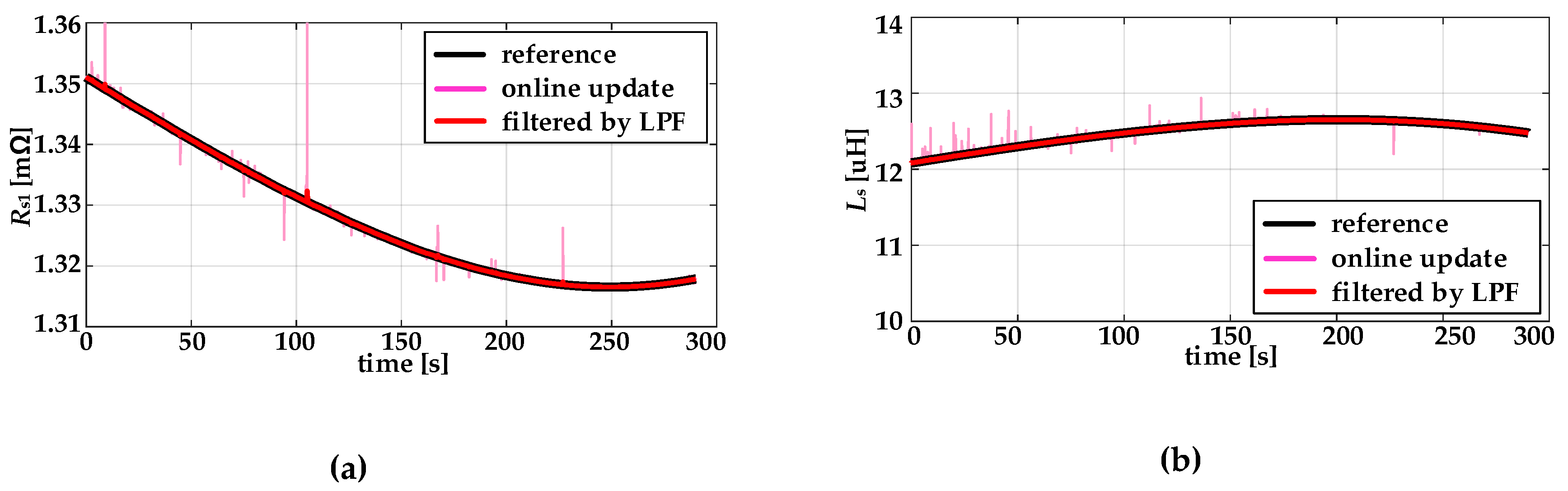
3.4. Verification of Online Update of ECM Parameters
4. Experimental Verification
4.1. Experimental Setup
4.2. Cranking Experiment Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Electric Motors: Working Behind the Scenes for Better Fuel Economy. Available online: http://www.global.tdk.com/techmag/topics/vol1.htm (accessed on 30 August 2019).
- Berecibar, M.; Garmendia, M.; Gandiaga, I.; Crego, J.; Villarreal, I. State of health estimation algorithm of LiFePO4 battery packs based on differential voltage curves for battery management system application. Energy 2016, 103, 784–796. [Google Scholar] [CrossRef]
- Chaoui, H.; Golbon, N.; Hmouz, I.; Souissi, R.; Tahar, S. High-performance battery-pack power estimation using a dynamic cell model. IEEE Trans. Ind. Electron. 2015, 62, 1610–1618. [Google Scholar] [CrossRef]
- Li, J.; Barillas, J.K.; Guenther, C.; Danzer, M.A. A comparative study of state of charge estimation algorithms for LiFePO4 batteries used in electric vehicles. J. Power Sources 2013, 230, 244–250. [Google Scholar] [CrossRef]
- Hu, X.; Jiang, J.; Cao, D.; Egardt, B. Battery health prognosis for electric vehicles using sample entropy and sparse Bayesian predictive modeling. IEEE Trans. Ind. Electron. 2016, 63, 2645–2656. [Google Scholar] [CrossRef]
- Dong, C.; Zeng, H.; Chen, M. Online Algorithms for Automotive Idling Reduction with Effective Statistics. IEEE Trans. Comput. Des. Integr. Circuits Syst. 2015, 34, 1742–1755. [Google Scholar] [CrossRef]
- Sawai, K.; Ohmae, T.; Suwaki, H.; Shiomi, M.; Osumi, S. Idling-stop vehicle road tests of advanced valve-regulated lead-acid (VRLA) battery. J. Power Sources 2007, 174, 54–60. [Google Scholar] [CrossRef]
- Motapon, S.N.; Dessaint, A.; Lu, L.A.; Fortin-Blanchette, H.; L-Haddad, K.A. A generic electro-thermal Li-Ion battery model for rapid evaluation of cell temperature temporal evolution. IEEE Trans. Ind. Electron. 2017, 64, 998–1008. [Google Scholar] [CrossRef]
- Wang, Q.; Kang, J.; Tan, Z.; Luo, M. An online method to simultaneously identify the parameters and estimate states for lithium ion batteries. Electrochim. Acta 2018, 289, 376–388. [Google Scholar] [CrossRef]
- Xiong, R.; Li, L.; Tian, J. Towards a smarter battery management system: A critical review on battery state of health monitoring methods. J. Power Sources 2018, 405, 18–29. [Google Scholar] [CrossRef]
- Jaguemont, J.; Boulon, L.; Dube, Y. Characterization and Modeling of a Hybrid-Electric-Vehicle Lithium-Ion Battery Pack at Low Temperatures. IEEE Trans. Veh. Technol. 2016, 65, 1–14. [Google Scholar] [CrossRef]
- Li, K.; Wei, F.; Tseng, K.J.; Soong, B.H. A practical Lithium-ion battery model for state of energy and voltage responses prediction incorporating temperature and ageing effects. IEEE Trans. Ind. Electron. 2016, 65, 6696–6708. [Google Scholar] [CrossRef]
- Lee, K.-T.; Dai, M.-J.; Chuang, C.-C. Temperature-Compensated Model for Lithium-Ion Polymer Batteries with Extended Kalman Filter State-of-Charge Estimation for an Implantable Charger. IEEE Trans. Ind. Electron. 2018, 65, 589–596. [Google Scholar] [CrossRef]
- Wang, K.; Gao, F.; Zhu, Y.; Liu, H.; Qi, C.; Yang, K.; Jiao, Q. Internal resistance and heat generation of soft package Li4Ti5O12 battery during charge and discharge. Energy 2018, 149, 364–374. [Google Scholar] [CrossRef]
- Yang, J.; Xia, B.; Shang, Y.; Huang, W.; Mi, C.C. Adaptive State-of-Charge Estimation Based on a Split Battery Model for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2017, 66, 10889–10898. [Google Scholar] [CrossRef]
- Tang, X.; Wang, Y.; Zou, C.; Yao, K.; Xia, Y.; Gao, F. A novel framework for Lithium-ion battery modeling considering uncertainties of temperature and aging. Energy Convers. Manag. 2019, 180, 162–170. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Guo, H.; Li, S. Comparison study on the battery models used for the energy management of batteries in electric vehicles. Energy Convers. Manag. 2012, 64, 113–121. [Google Scholar] [CrossRef]
- Farmann, A.; Sauer, D.U. Comparative study of reduced order equivalent circuit models for on-board state-of-available-power prediction of lithium-ion batteries in electric vehicles. Appl. Energy 2018, 225, 1102–1122. [Google Scholar] [CrossRef]
- Abdollahi, A.; Han, X.; Raghunathan, N.; Pattipati, B.; Balasingam, B.; Pattipati, K.; Bar-Shalom, Y.; Card, B. Optimal charging for general equivalent electrical battery model, and battery life management. J. Energy Storage 2017, 9, 47–58. [Google Scholar] [CrossRef]
- Abdollahi, A.; Han, X.; Raghunathan, N.; Pattipati, B.; Balasingam, B.; Pattipati, K.R.; Bar-Shalom, Y.; Card, B. Optimal charging for general equivalent electrical battery model, and battery life management. J. Energy Storage 2017, 9, 47–58. [Google Scholar]
- Seaman, A.; Dao, T.-S.; McPhee, J. A survey of mathematics-based equivalent-circuit and electrochemical battery models for hybrid and electric vehicle simulation. J. Power Sources 2014, 256, 410–423. [Google Scholar] [CrossRef] [Green Version]
- Gou, J.; Lee, A.; Pyko, J. Modeling of the cranking and charging processes of conventional valve regulated lead acid (VRLA) batteries in micro-hybrid applications. J. Power Sources 2014, 263, 186–194. [Google Scholar] [CrossRef]
- Zhang, X.; Grube, R.; Shin, K.-K.; Salman, M.; Conell, R.S. Parity-relation-based state-of-health monitoring of lead acid batteries for automotive applications. Control Eng. Pract. 2011, 19, 555–563. [Google Scholar] [CrossRef]
- Kerley, R.; Hyun, J.H.; Ha, D.S. Automotive lead-acid battery state-of-health monitoring system. In Proceedings of the IECON 2015–41st Annual Conference of the IEEE Industrial Society, Yokohama, Japan, 9–12 November 2015. [Google Scholar]
- Blanke, H.; Bohlen, O.; Buller, S.; De Doncker, R.W.; Fricke, B.; Hammouche, A.; Linzen, D.; Thele, M.; Sauer, D.U. Impedance measurements on lead–acid batteries for state-of-charge, state-of-health and cranking capability prognosis in electric and hybrid electric vehicles. J. Power Sources 2005, 144, 418–425. [Google Scholar] [CrossRef]
- Sabatier, J.; Cugnet, M.; Laruelle, S.; Grugeon, S.; Sahut, B.; Oustaloup, A.; Tarascon, J. A fractional order model for lead-acid battery crankability estimation. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 1308–1317. [Google Scholar] [CrossRef]
- Cugnet, M.; Sabatier, J.; Laruelle, S.; Grugeon, S.; Sahut, B.; Oustaloup, A.; Tarascon, J.-M. On Lead-Acid-Battery Resistance and Cranking-Capability Estimation. IEEE Trans. Ind. Electron. 2010, 57, 909–917. [Google Scholar] [CrossRef]
- Hou, Z.Y.; Lou, P.Y.; Wang, C.C. State of charge, state of health, and state of function monitoring for EV BMS. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics, Las Vegas, NV, USA, 8–10 January 2017. [Google Scholar]
- Shen, P.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The Co-estimation of State of Charge, State of Health, and State of Function for Lithium-Ion Batteries in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- FreedomCAR Battery Test Manual for Power—Assist Hybrid Electric Vehicles. Available online: https://avt.inl.gov/sites/default/files/pdf/battery/freedomcar_manual_04_15_03.pdf (accessed on 30 August 2019).
- Giordano, G.; Klass, V.; Behm, M.; Lindbergh, G.; Sjoberg, J. Model-Based Lithium-Ion Battery Resistance Estimation from Electric Vehicle Operating Data. IEEE Trans. Veh. Technol. 2018, 67, 3720–3728. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Z.; Sun, F.; Dorrell, D.G. Online Parameter Identification of Ultracapacitor Models Using the Extended Kalman Filter. Energies 2014, 7, 3204–3217. [Google Scholar] [CrossRef]
- Partovibakhsh, M.; Liu, G. An Adaptive Unscented Kalman Filtering Approach for Online Estimation of Model Parameters and State-of-Charge of Lithium-Ion Batteries for Autonomous Mobile Robots. IEEE Trans. Control Syst. Technol. 2015, 23, 357–363. [Google Scholar] [CrossRef]
- Capizzi, G.; Bonanno, F.; Tina, G.M. Recurrent Neural Network-Based Modeling and Simulation of Lead-Acid Batteries Charge–Discharge. IEEE Trans. Energy Convers. 2011, 26, 435–443. [Google Scholar] [CrossRef]
- Karami, H.; Karimi, M.A.; Mahdipour, M. ANN modeling of cold cranking test for sealed lead-acid batteries. J. Power Sources 2006, 158, 936–943. [Google Scholar] [CrossRef]
- Liu, H.; Wang, Z.; Cheng, J.; Maly, D. Improvement on the Cold Cranking Capacity of Commercial Vehicle by Using Supercapacitor and Lead-Acid Battery Hybrid. IEEE Trans. Veh. Technol. 2009, 58, 1097–1105. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Battery type | LiFePO4 (LFP) |
| Manufacturer | Top Battery |
| Current density | 50 [Ah] |
| Voltage range | 8.0–14.4 [V] |
| Nominal voltage | 12.0 [V] |
| Purpose | Experiment 1 | Experiment 2 | |
|---|---|---|---|
| SOC of SLI battery | 80% | 90% | |
| Temperature | 20 [°C] | −25 [°C] | |
| iterminal(tc)/∆tc | −703.32 [A]/4 [ms] | −907.29 [A]/5 [ms] | |
| Updated parameters | Rs1 | 1.09 [mΩ] | 2.02 [mΩ] |
| Ls | 13.55 [μH] | 16.70 [μH] | |
| Estimation error with look-up table | 1.34% | −17.99% | |
| Estimation error with online update | 0.87% | 1.40% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noh, T.-W.; Ahn, J.-H.; Lee, B.K. Cranking Capability Estimation Algorithm Based on Modeling and Online Update of Model Parameters for Li-Ion SLI Batteries. Energies 2019, 12, 3365. https://doi.org/10.3390/en12173365
Noh T-W, Ahn J-H, Lee BK. Cranking Capability Estimation Algorithm Based on Modeling and Online Update of Model Parameters for Li-Ion SLI Batteries. Energies. 2019; 12(17):3365. https://doi.org/10.3390/en12173365
Chicago/Turabian StyleNoh, Tae-Won, Jung-Hoon Ahn, and Byoung Kuk Lee. 2019. "Cranking Capability Estimation Algorithm Based on Modeling and Online Update of Model Parameters for Li-Ion SLI Batteries" Energies 12, no. 17: 3365. https://doi.org/10.3390/en12173365