Hierarchical Control with Fast Primary Control for Multiple Single-Phase Electric Springs


Abstract
:
1. Introduction
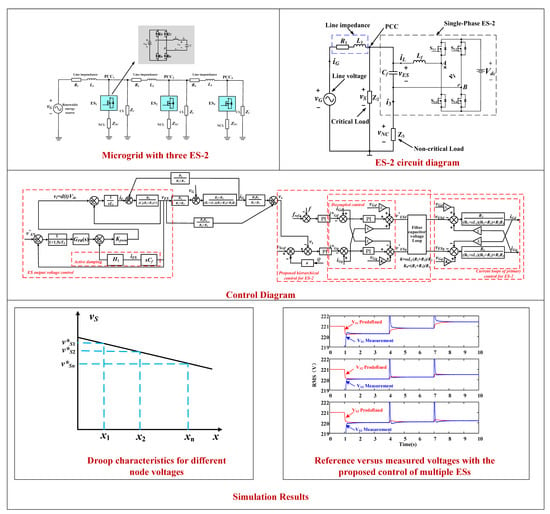
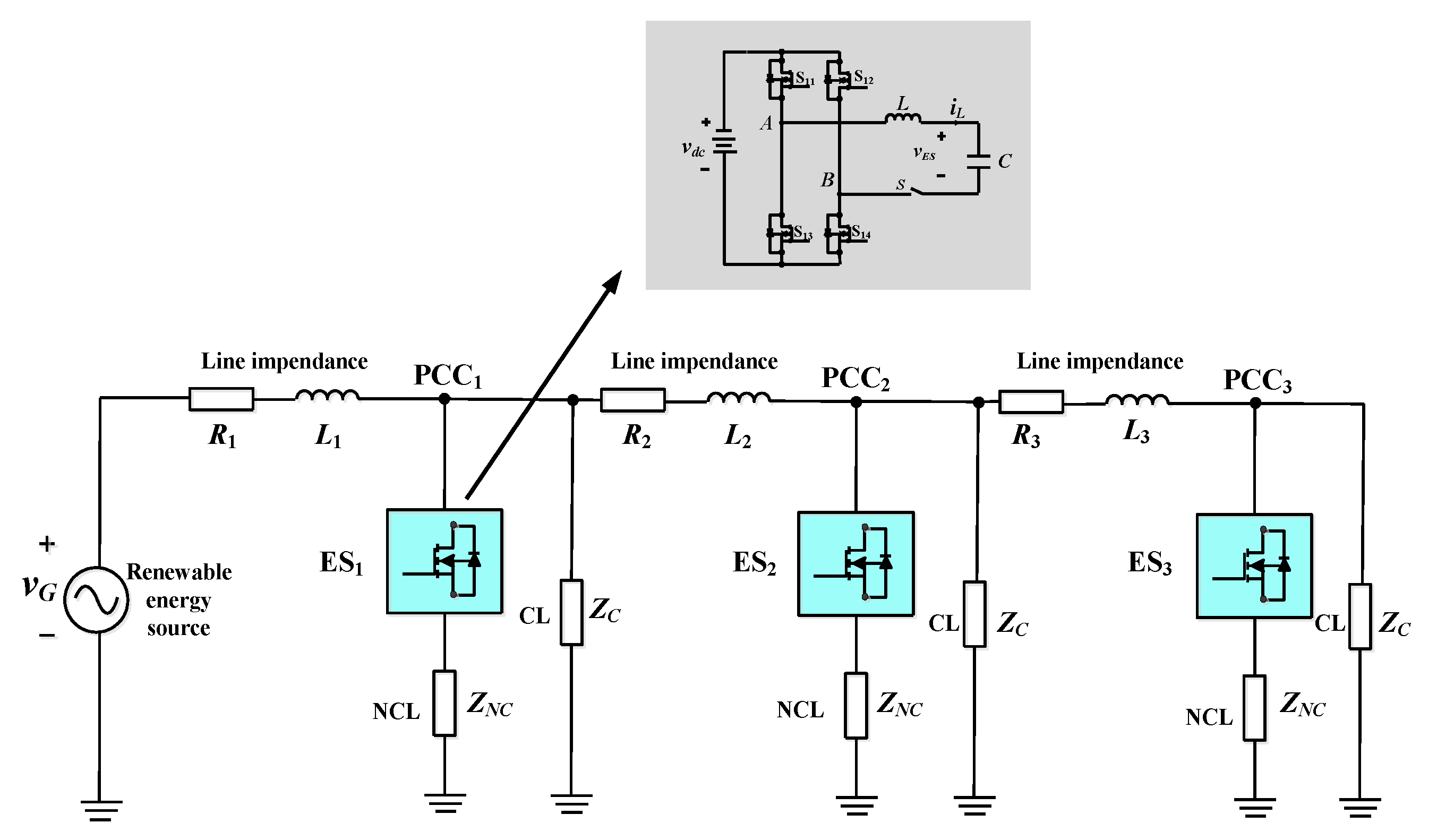
2. Electric Spring (ES-2) Operating Principles
2.1. ES-2 Topology
2.2. ES-2 Model
3. The Proposed Control
3.1. ES-2 Control Scheme
3.2. The Proposed Hierarchical Control for Multiple ES-2
4. Simulations and Discussions
4.1. Single ES Control
4.2. Hierarchical Control of Multiple ESs
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cheng, M.; Zhu, Y. The state of the art of wind energy conversion systems and technologies: A review. Energy Convers. Manag. 2014, 88, 332–347. [Google Scholar] [CrossRef]
- Hu, H.; Shao, Y.; Tang, L.; Ma, J.; He, Z.; Gao, S. Overview of harmonic and resonance in railway electrification systems. IEEE Trans. Ind. Appl. 2018, 54, 5227–5245. [Google Scholar] [CrossRef]
- Hui, S.Y.; Lee, C.K.; Wu, F.F. Electric springs—A new smart grid technology. IEEE Trans. Smart Grid 2012, 3, 1552–1561. [Google Scholar] [CrossRef]
- Lee, C.K.; Chaudhuri, B.; Hui, S.Y.R. Hardware and control implementation of electric springs for stabilizing future smart grid with intermittent renewable energy sources. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 18–27. [Google Scholar] [CrossRef]
- Wang, Q.; Zha, D.; Deng, F.; Cheng, M.; Buja, G. A topology of DC electric springs for DC household applications. IET Power Electron. 2019, 12, 1241–1248. [Google Scholar] [CrossRef]
- Tan, S.C.; Lee, C.K.; Hui, S.Y.R. General steady-state analysis and control principle of electric springs with active and reactive power compensations. IEEE Trans. Power Electron. 2013, 28, 3958–3969. [Google Scholar] [CrossRef]
- Soni, J.; Panda, S.K. Electric spring for voltage and power stability and power factor correction. IEEE Trans. Ind. Appl. 2017, 53, 3871–3879. [Google Scholar] [CrossRef]
- Chen, X.; Hou, Y.; Tan, S.C.; Lee, C.K.; Hui, S.Y.R. Mitigating voltage and frequency fluctuation in microgrids using electric springs. IEEE Trans. Smart Grid 2015, 6, 508–515. [Google Scholar] [CrossRef]
- Liang, L.; Hou, Y.; Hill, D.J.; Hui, S.Y.R. Enhancing resilience of microgrids with electric springs. IEEE Trans. Smart Grid 2018, 9, 2235–2247. [Google Scholar] [CrossRef]
- Wang, Q.; Cheng, M.; Chen, Z. Steady-state analysis of electric springs with a novel δ control. IEEE Trans. Power Electron. 2015, 30, 7159–7169. [Google Scholar] [CrossRef]
- Mok, K.T.; Tan, S.C.; Hui, S.Y.R. Decoupled power angle and voltage control of electric springs. IEEE Trans. Power Electron. 2016, 31, 1216–1229. [Google Scholar] [CrossRef]
- Wang, Q.; Cheng, M.; Jiang, Y.; Zuo, W.; Buja, G. A Simple Active and Reactive Power Control for Applications of Single-Phase Electric Springs. IEEE Trans. Ind. Electron. 2018, 65, 6291–6300. [Google Scholar] [CrossRef]
- Lee, C.K.; Chaudhuri, N.R.; Chaudhuri, B. Droop control of distributed electric springs for stabilizing future power grid. IEEE Trans. Smart Grid 2013, 4, 1558–1566. [Google Scholar] [CrossRef]
- Chen, X.; Hou, Y.; Hui, S.Y.R. Distributed control of multiple electric springs for voltage control in Microgrid. IEEE Trans. Smart Grid 2017, 8, 1350–1359. [Google Scholar] [CrossRef]
- Chen, J.; Yan, S.; Yang, T.; Tan, S.C.; Hui, S.Y.R. Practical evaluation of droop and consensus control of distributed electric springs for both voltage and frequency regulation in Microgrid. IEEE Trans. Power Electron. 2019, 34, 6947–6959. [Google Scholar] [CrossRef]
- Chaudhuri, N.R.; Lee, C.K.; Chaudhuri, B.; Hui, S.Y.R. Dynamic modeling of electric springs. IEEE Trans. Smart Grid 2014, 5, 2450–2458. [Google Scholar] [CrossRef]
- Yang, T.; Liu, T.; Chen, J.; Yan, S.; Hui, S.Y.R. Dynamic modular modeling of smart loads associated with electric springs and control. IEEE Trans. Power Electron. 2018, 33, 10071–10085. [Google Scholar] [CrossRef]
- Luo, X.; Akhtar, Z.; Lee, C.K.; Chaudhuri, B.; Tan, S.C.; Hui, S.Y.R. Distributed voltage control with electric springs: Comparison with STATCOM. IEEE Trans. Smart Grid 2015, 6, 209–219. [Google Scholar] [CrossRef]
- Yang, T.; Mok, K.T.; Tan, S.C.; Lee, C.K.; Hui, S.Y.R. Electric springs with coordinated battery management for reducing voltage and frequency fluctuations in microgrids. IEEE Trans. Smart Grid 2018, 9, 1943–1952. [Google Scholar] [CrossRef]
- Wang, M.; Yang, T.; Tan, S.C.; Hui, S.Y.R. Hybrid electric springs for grid-tied power control and storage reduction in AC microgrids. IEEE Trans. Power Electron. 2019, 34, 3214–3225. [Google Scholar] [CrossRef]
- Yang, Y.; Ho, S.S.; Tan, S.C.; Hui, S.Y.R. Small-signal model and stability of electric springs in power grids. IEEE Trans. Smart Grid 2018, 9, 857–865. [Google Scholar] [CrossRef]
- Bevrani, H.; Shokoohi, S. An intelligent droop control for simultaneous voltage and frequency regulation in islanded microgrids. IEEE Trans. Smart Grid 2013, 4, 1505–1513. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Reactive power sharing in islanded microgrids using adaptive voltage droop control. IEEE Trans. Smart Grid 2015, 6, 3052–3060. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Tinajero, G.A.; Aldana, N.L.D.; Luna, A.C.; Ramirez, J.S.; Cruz, N.V.; Guerrero, J.M.; Vasquez, J.C. Extended-optimal-power-flow-based hierarchical control for islanded AC microgrids. IEEE Trans. Power Electron. 2019, 34, 840–848. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Line 1resistance (R1) | 0.3 Ω |
| Line 1 inductance (L1) | 5 mH |
| Line 2resistance (R2) | 0.2 Ω |
| Line 2 inductance (L2) | 1.2 mH |
| Line 3resistance (R3) | 0.2 Ω |
| Line 3 inductance (L3) | 1.2 mH |
| Critical load 1(RC1) | 180 Ω |
| Non-critical load 1(RNC1) | 40 Ω |
| Critical load 2(RC2) | 100 Ω |
| Non-critical load 2(RNC2) | 60 Ω |
| Critical load 3(RC3) | 100 Ω |
| Non-critical load 3(RNC3) | 60 Ω |
| filter Inductance (L) | 2.3 mH |
| filter Capacitance (C) | 26 µF |
| PCC voltage (VS) | 220 V |
| DC bus voltage (Vdc) | 400 V |
| Switching frequency (f) | 20 kHz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Zuo, W.; Cheng, M.; Deng, F.; Buja, G. Hierarchical Control with Fast Primary Control for Multiple Single-Phase Electric Springs. Energies 2019, 12, 3511. https://doi.org/10.3390/en12183511
Wang Q, Zuo W, Cheng M, Deng F, Buja G. Hierarchical Control with Fast Primary Control for Multiple Single-Phase Electric Springs. Energies. 2019; 12(18):3511. https://doi.org/10.3390/en12183511
Chicago/Turabian StyleWang, Qingsong, Wujian Zuo, Ming Cheng, Fujin Deng, and Giuseppe Buja. 2019. "Hierarchical Control with Fast Primary Control for Multiple Single-Phase Electric Springs" Energies 12, no. 18: 3511. https://doi.org/10.3390/en12183511