1. Introduction
An aeroengine, with the requirements of long engine life, great operational flexibility, and control performance, is a complicated aerothermodynamic system [
1]. The engine model is formulated in a set of mathematical expressions for controller design and health monitoring [
2,
3]. In the modeling process, the goal is to obtain an accurate and real-time model with a simple structure. The nonlinear component level model (NCLM) is a common model established on the basis of mechanical and aerothermodynamic theories. Though the accuracy of the NCLM is very high, it can hardly deal with the trade-off between the accuracy and real-time performance [
4]. There are increasing demands needed to be considered due to the development of the modern aircraft, and therefore, the NCLM has become increasingly complex, which makes the trade-off much more difficult to deal with. Meanwhile, the balance equations in the NCLM need to be iteratively solved within limited time while the computational and memory resources of the electronic control unit (ECU) in aeroengines are limited. Because the real-time performance of NCLM on hardware of aeroengine is not satisfactory, the NCLM is not suitable for controller design or health monitoring. Hence, a real-time model with acceptable modeling accuracy and a few required parameters is necessary for practical applications, which is the motivation of this paper.
In order to obtain satisfactory real-time performance, it is a common way to simplify or neglect some nonsignificant processes. Since 1970s, attention has been paid on this problem. A simplified model of an F100-PW-100 turbofan engine is constructed to operate on a hybrid computer [
5]. Some simplification in the flow path of the NCLM is used for a highly compact model which is able to be operated on an engine mounted computer [
6]. Despite the sacrificed accuracy of the simplified model, the real-time performance is not significantly improved to meet the demands of ECU. Accelerating the convergence speed of the iteration process is an effective way to ease the computational burden to some extent [
7]. However, these models are still calculated in an iterative way and the iteration will be hard to converge if the current state is far from the steady state. Besides, the inputs are calculated by the controller contain noises inevitably, which always makes the model keep away from the steady state and will worsen the real-time performance of the NCLM. Data-driven methods provide a choice to construct a real-time model without iteration [
8,
9]. The model with low complexity is built to capture the behavior of the system [
10]. A data-based Takkgi–Sugeno fuzzy model is studied in Reference [
11] throughout the flight envelope. However, these approaches rely on plenty of flight data and the modeling process will become more complex if the division of flight envelope is carried out. Another way to avoid the iteration in NCLM is to transformed the balance equations into differential and algebraic equations, as shown in Reference [
12]. However, this transformation is complicated because it requires a lot of considerations on the accumulation effect of a cavity. Establishing linear models without iteration is an ideal way to deal with these problems.
The linear parameter varying (LPV) model, which consists of a series of linear time invariant (LTI) models, has developed rapidly due to its adaptability in the past 30 years [
13,
14,
15,
16]. The LTI models only guarantee the performance around given operating points, and the obtained linear model can only work near the given operating point. The LPV modeling techniques establish a systematic gain-scheduling structure and ensure the performance around off-design points. Convex combination of specific local linear models based on interpolation strategy is the basic idea of the LPV state space model. This process consists of two steps: firstly, classic modeling method is used to obtain LTI models at successive operating points. Then, these models and bias data are combined into the form of the LPV model [
17]. The practicability and effectiveness of the LPV models have been proved in turbofan engines. Balas et al. have performed researches on LPV modeling and control synthesis based on a P&W STF 952 turbofan engine model [
18]. Gilbert et al. designed relatively simple controllers based on the polynomial LPV models established by turbofan model [
19]. A velocity-based LPV model is established under the assumption of a correct transformation [
20]. The differentiation on the input and output of the model will take cumulative modeling errors. All of these models are control oriented, and therefore, some steady modeling errors are neglected because the close-loop control makes the impact of the steady errors on the quality of control quite small [
21]. However, the steady errors cannot be ignored if the model is established for health monitoring. Meanwhile, the discontinuity of the parameters of the LTI models are not discussed, which will affect the accuracy of the model. This factor is considered in Reference [
22]. In the paper, an analytical model is established based on linearization of components in NCLM and these linear models are still tied in a iterative framework. However, the verification of the real-time performance of the analytical model is not given. The LPV model is usually linearized in the sea-level condition and extended to the full envelope by using similarity rules [
23], but it has trouble dealing with some outputs that do not meet the similarity criteria, such as thrust.
In order to obtain a real-time model based on LPV model for both control and health monitoring, a novel integrated mechanism model is proposed. The iteration in NCLM is replaced by an LPV model to improve the real-time performance, and the flow-path calculation is reserved to prevent the loss of the aerothermodynamic characteristics, and therefore, the dynamic performance of the integrated model will be more similar to the NCLM than the traditional and straightforward LPV model does. The modeling process is as follows: Firstly, the small perturbation method is used to get local linear models at ground operating points. Secondly, the equilibrium points are combined into the coefficient matrices of the LPV model to simplify the structure. Thirdly, the polynomial regression method is used to fit parameters of the LPV models to reduce the required parameters. Then, the similarity rule and polytope theory are used througout full flight envelope operation. Finally, the LPV model is integrated with flow path calculation, which takes account of the characteristic of aerothermodynamics of the turbofan engine. The main contribution of this paper is to integrate the LPV model with flow path calculation to avoid iteration. The continuity of parameters in LTI models is discussed, and smooth coefficients of LTIs are obtained by using the spline interpolation method to improve the modeling accuracy. To verify the efficiency of this approach, the accuracy and real-time performance of the proposed model, the traditional LPV model, and the NCLM are compared in the simulation at the end of this paper.
This paper is structured as follows:
Section 2 provides the NCLM and LPV model for turbofan engine. The novel modeling method and its advantages are introduced in
Section 3. The accuracy improvement of the proposed model is discussed in
Section 4. The effectiveness of the proposed modeling method is demonstrated by simulations in
Section 5. In the end, the conclusion of the paper is given in
Section 6.
3. Novel Mechanism Model
Because NCLM is established based on test data, it is a very important model for control and health monitoring, but this model is not a real-time model for two reasons: (1) The calculation of
in Equation (
6) needs repeated flow path calculations and worsens the real-time performance of NCLM; (2) If the noises and disturbances of the inputs need to be considered, more flow path calculations will be required because the uncertainty continuously moves the states of the system away from equilibrium point, and therefore, the real-time performance of NCLM is not satisfactory. Therefore, the application of NCLM approach is usually limited due to its poor real-time performance.
Meanwhile, although the traditional LPV technique is suitable to obtain a real-time model, the straightforward linearization of the traditional LPV model will neglect some aerothermodynamic details and, therefore, affect the modeling accuracy. Moreover, if the LPV model is established using the similarity criteria, it is hard to deal with the outputs that do not meet the similarity criteria, such as thrust and power. In such cases, massive linerizations of the traditional LPV model or divisions of flight envelope are required throughout the large-scale flight envelope, which will restrict the application of LPV technique.
In order to overcome the disadvantages of NCLM approach and LPV technique, a novel mechanism modeling approach is proposed in this paper. In this approach, the mechanism flow path calculation of NCLM preserves the aerothermodynamic characteristics of NCLM. The solution of iteration in Equation (
6) is calculated by an LPV model and is provided for flow path calculations directly so that only one flow path calculation is required in one-step simulation. The LPV model here is established as follows based on the solutions of iteration in NCLM under the sea-level condition.
If the iteration of Equation (
6) becomes convergent, Equation (
5) will become the following:
where
is equivalent to
f in Equation (
7). An LPV model will be obtained if
is substituted for
g in Equation (
7), and then, the state
x and output
of this LPV model can be provided for the flow path calculation in NCLM. This LPV model and flow path calculation are combined into an integrated model.
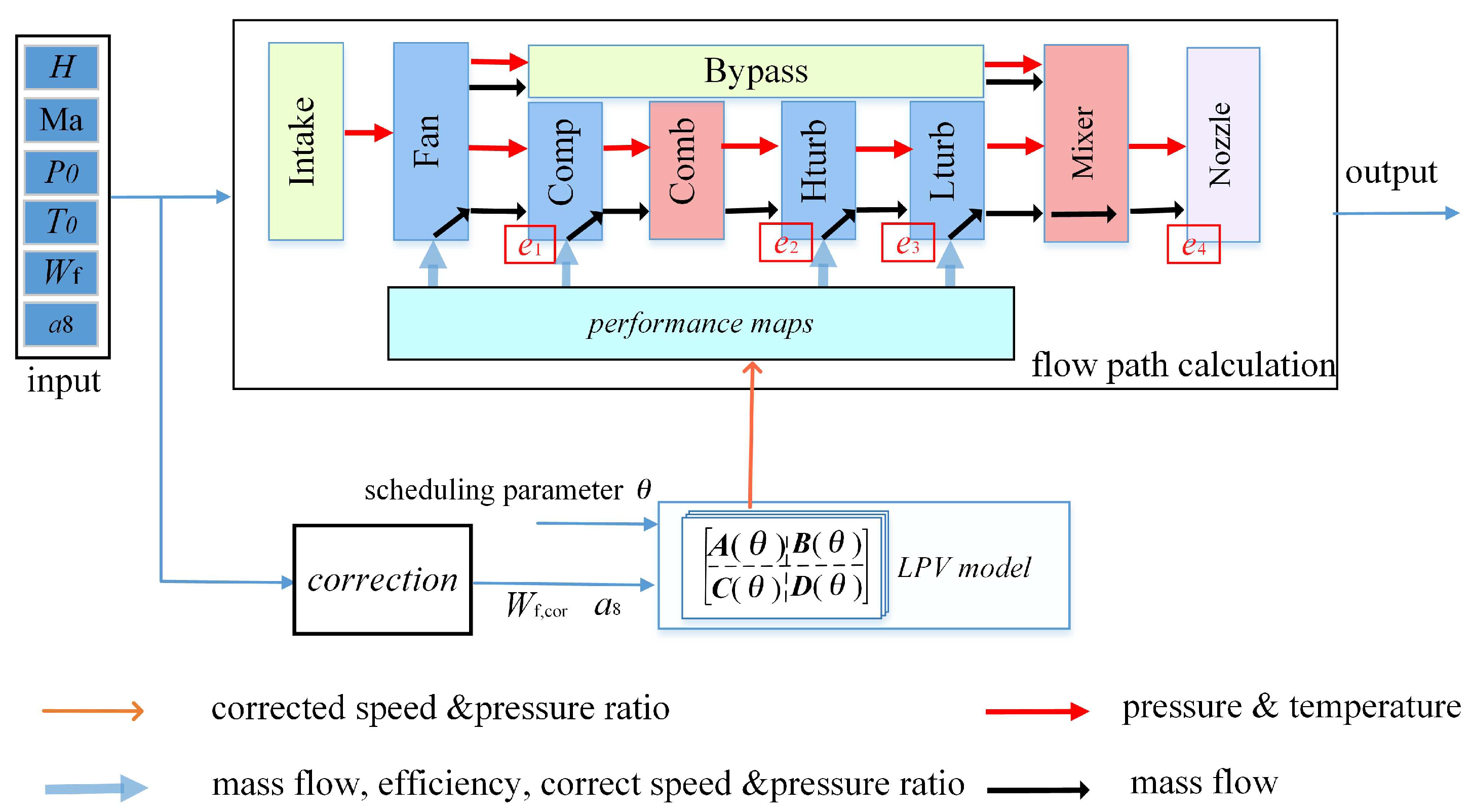
Figure 2 shows the computational flow diagram of this integrated model, where the input vector is the same as that of NCLM. The inputs are given to the flow path calculation and is corrected using similarity criteria according to Reference [
25]. The corrected inputs
and
, along with the scheduling parameter
measured from the turbofan engine, are furnished to the LPV model. Note that the scheduling parameters of both the LPV model in integrated model and the traditional LPV model are obtained from NCLM in this paper. The state and output of LPV model calculated according to Equation (
12) are provided for performance maps to obtain mass flow and efficiency of each rotor component.
As is shown in
Figure 2, iterations and balance equations are not involved in the computational flow diagram. The flow path calculation is executed once in one time step no matter how far the current state is away from the equilibrium point; in such case, the real-time performance of this model will be much better than that of NLCM and will be insensitive to the input noises and disturbances while that of NCLM not. In addition, the number of outputs of the integrated model is the same as that of NCLM because the two models share the same flow path calculation. Meanwhile, there are always two states and four outputs of the LPV model required by the integrated model, and therefore, less parameters will be required than the traditional LPV model if more than 4 outputs of the real-time model are required. Moreover, the LPV model in the integrated model is partly linearized from NCLM. The reserved flow path calculation compensates for aerothermodynamic characteristics neglected by the linearization of traditional LPV model and tends to result in more accurate outputs. Therefore, there would be three evident advantages of this integrated model: the real-time performance is (a) insensitive to the input noises and disturbances, (b) faster than NCLM, and (c) more accurate than the traditional LPV model.
It should be noticed that is ensured in NCLM. However, caused by the modeling errors of the integrated model is out of restriction in the integrated model. If these modeling errors are under control, the differences between the integrated model and NCLM will be quite small. Conversely, the problem arises that, if the LPV model is not accurate, the modeling errors will have side effects on almost all of the outputs of the model.
5. Simulation Results
In this section, the accuracy and computational complexity of the integrated model will be discussed. Comparisons among the integrated mechanism model, the NCLM, and the traditional LPV model are also carried out. The outputs of these models are , and F. All the simulation experiments are conducted on a personal computer with an Intel Core i7-6500U CPU and 8 GB Memory.
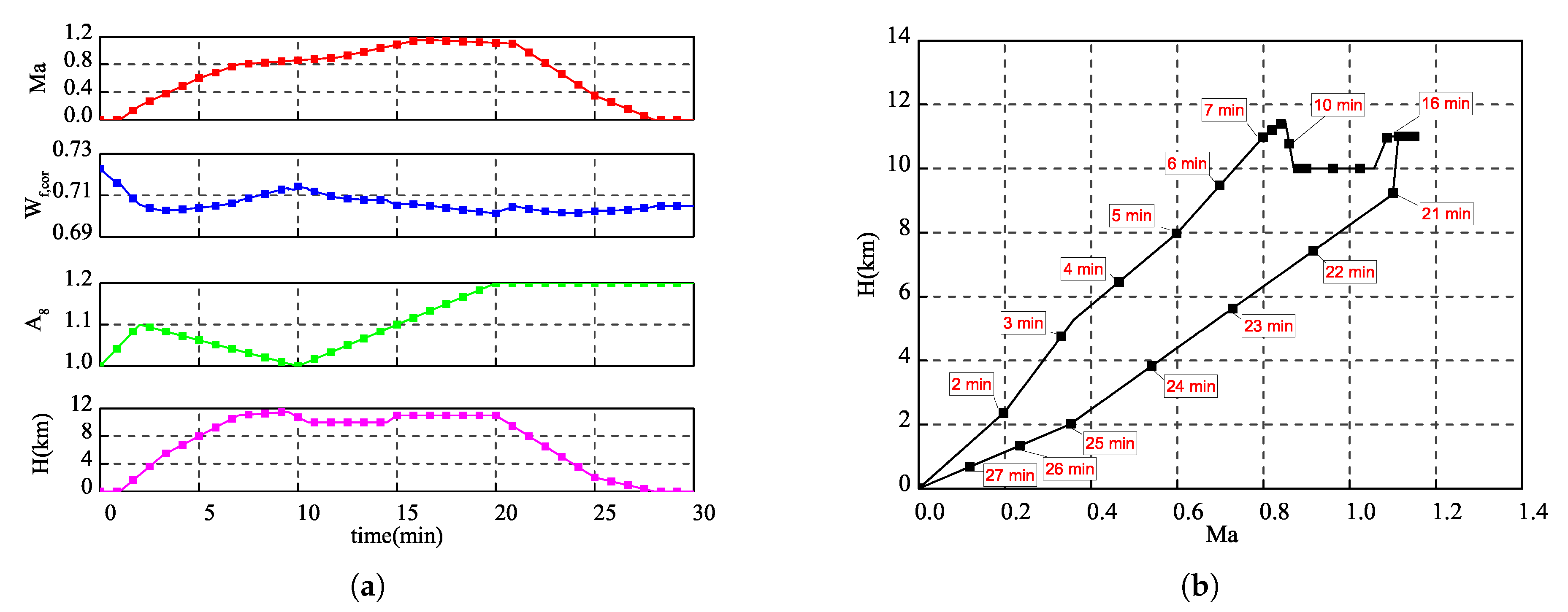
The inputs are given in
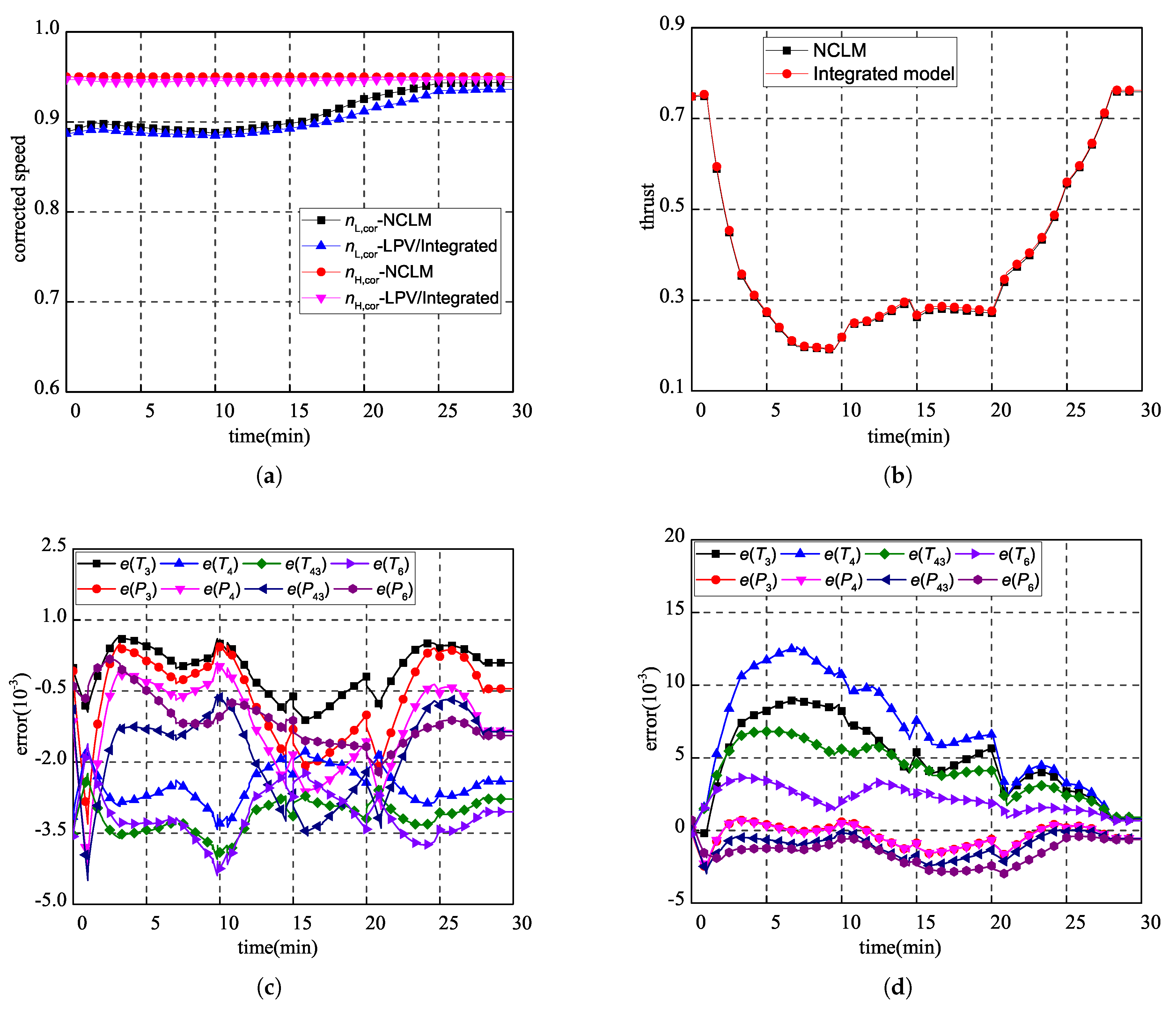
Figure 8a,b, and the states and outputs are shown in
Figure 9. The integrated model and the traditional LPV model share the same states and matrices
A and
B according to Equation (
17), and thus, the responses of the states are the same in
Figure 9a. Compared with the maximum absolute error (MAE) of the NCLM, the MAE of the states (
and
) is less than 1.32% and the root mean square error (RMSE) is 0.77% in
Table 1. The MAE of the outputs of the integrated model is 0.45%, which is less than that of the traditional model. In
Table 1, the bold data shows that the integrated model significantly improves the accuracy of
and, therefore, improves the average MAE and RMSE.
In fact, the inputs inevitably contain noises caused by sensors or disturbances, and therefore, perturbations on the inputs should be considered when verifying the accuracy and real-time performance of the considered models. A normally distributed pseudorandom noise
is added to the fuel flow in
Figure 8a while the other three inputs remain the same.
Table 2 shows the time consumption of each model over a thirty-minute simulation.
and
stand for the time consumption and the number of flow path calculations, respectively, with smooth inputs, while
and
stand for the time consumption and the number of flow path calculations taking account of input noises, respectively.
It can be concluded that the time consumption mainly depends on the number of flow path calculations. Therefore, when the input noise is considered, the time consumption and the number of flow path calculations of the NCLM increase evidently, while those of the integrated model and traditional LPV model are almost not affected. In
Table 3, the noise has a slight side effect on the accuracy of all the outputs of the two models. The bold data shows that, similar to
Table 2, the integrated model can also improve the accuracy of
, and
and the average MAE and RMSE when the noises are considered.
6. Conclusions
In order to obtain a mechanism model of turbofan engine with satisfactory real-time performance and accuracy, an integrated model is proposed. The iteration in NCLM is substituted by an LPV model to improve the real-time performance, and the flow-path calculation is integrated with the LPV model to preserve the nonlinearity and aerothermodynamics of the model. The influence of the residual and the continuity of the NCLM are discussed to improve the accuracy of the integrated model, and it can be concluded that lower residual and spline-fit interpolation of NCLM make the integrated model more accurate. Simplification and curve fitting are used to reduce the number of the restored parameters. In the simulation, only 8% parameters are required after the simplification.
From the simulation results, the following can be concluded: (a) Compared to NCLM, the proposed model saves over 75% of simulation time if the input noises are not considered and 89% in the presence of the input noises, which means that the real-time performance of the proposed model is insensitive to input noises. (b) When the input noise is neglected, although the integrated mechanism model works slower, it gives better MAE and RMSE values for , , and than the traditional LPV model. Meanwhile, the average MAE and RMSE of the proposed model decrease by 0.15% and 0.08%, respectively. (c) The real-time performance of the proposed model is insensitive to the input noises, and therefore, the simulation time is nearly the same as the simulation time when ignoring noises. Although the input noises will slightly deprave the accuracy of the two models, the average MAE and RMSE of the proposed model decrease by 0.15% and 0.12%, respectively.
Due to the positive effect of the verification, further researches are encouraged: (a) The proposed model could be applied to other aeroengines that require iteration of balance equation, such as turbojet engine and turboshaft engine, and (b) the accuracy and real-time performance could be verified on hardware in loop.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}