Synthesis of Optimal Battery State-of-Charge Trajectory for Blended Regime of Plug-in Hybrid Electric Vehicles in the Presence of Low-Emission Zones and Varying Road Grades



Abstract
:
1. Introduction
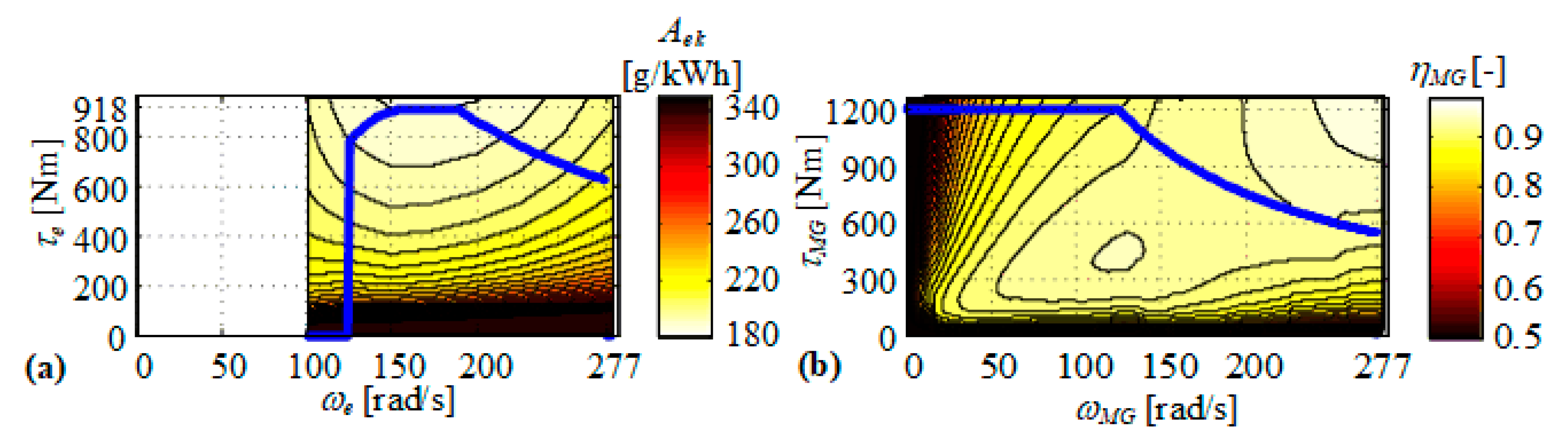
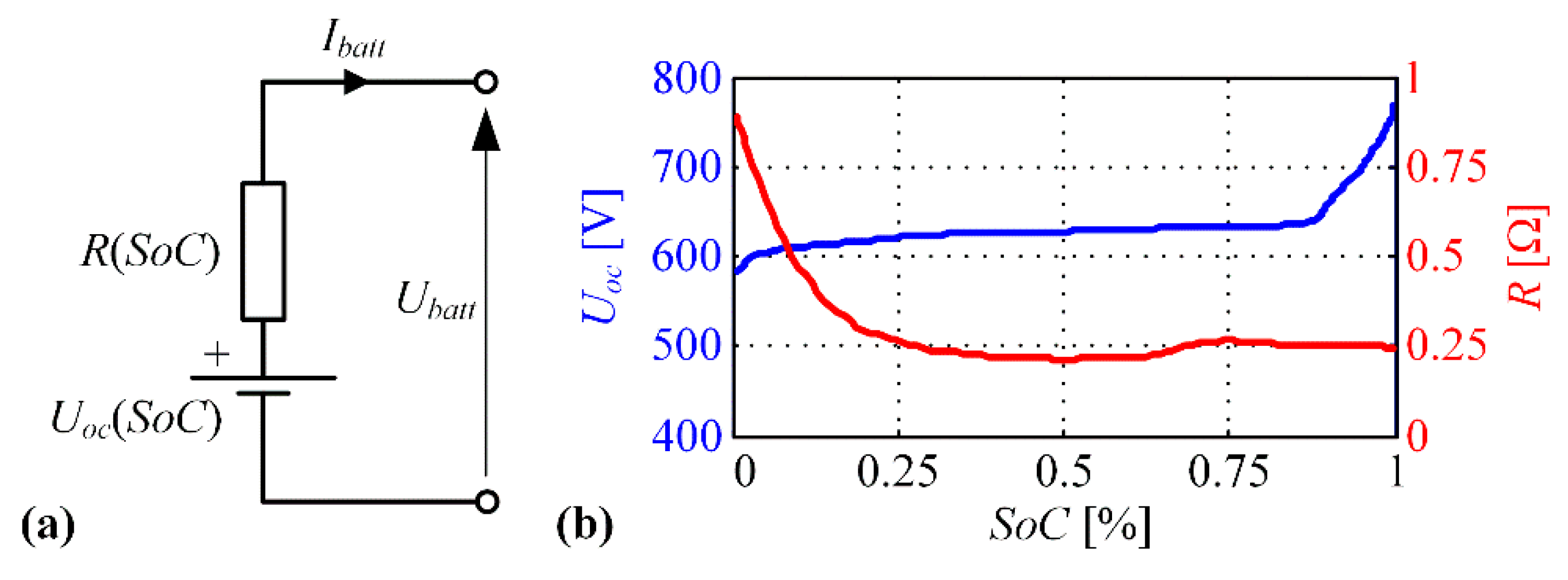
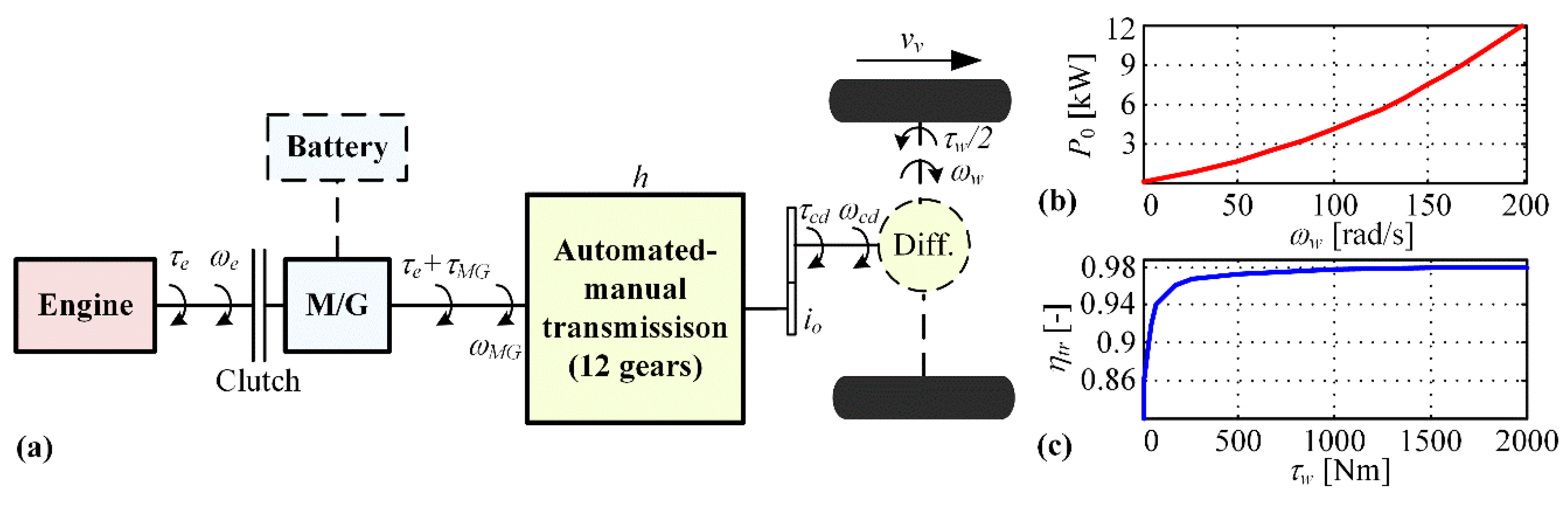
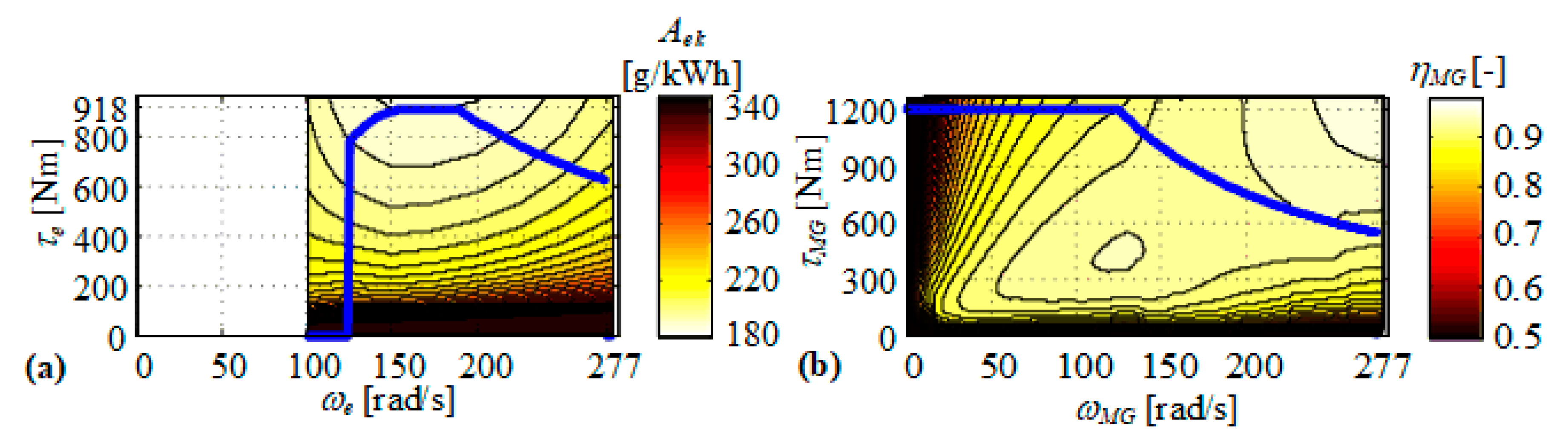
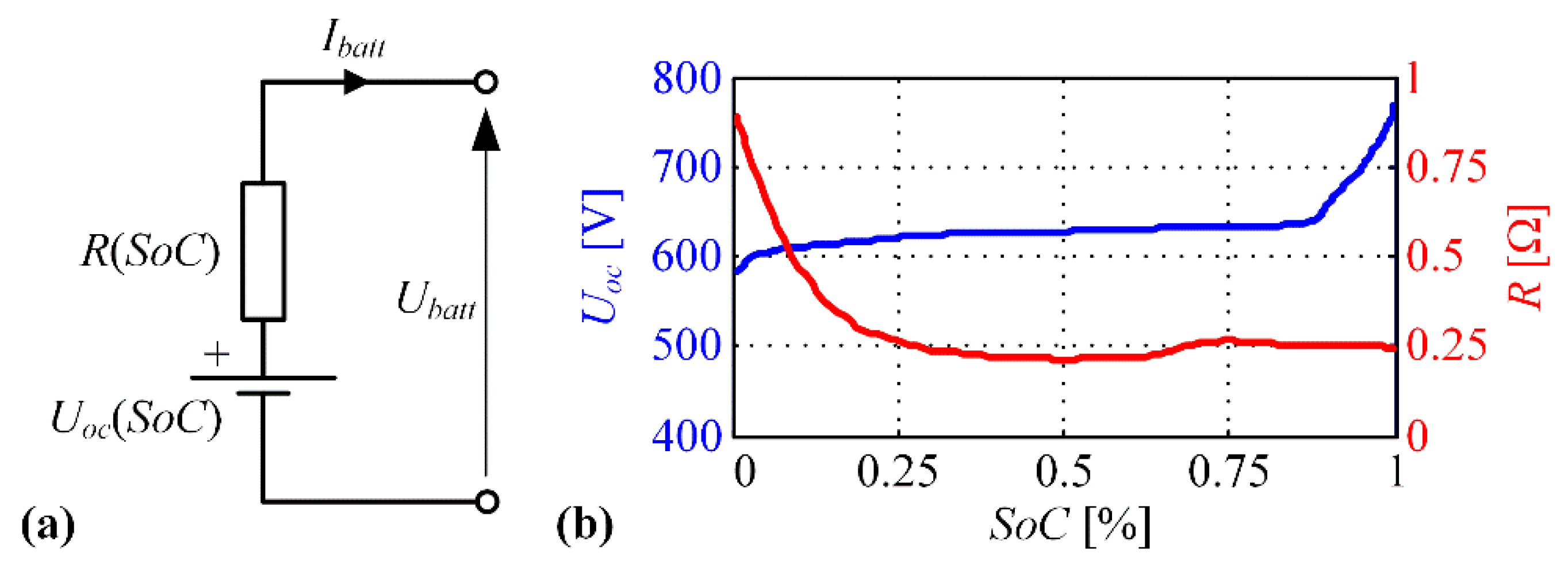
2. Mathematical Model of PHEV Powertrain
3. Optimization of PHEV Control Variables
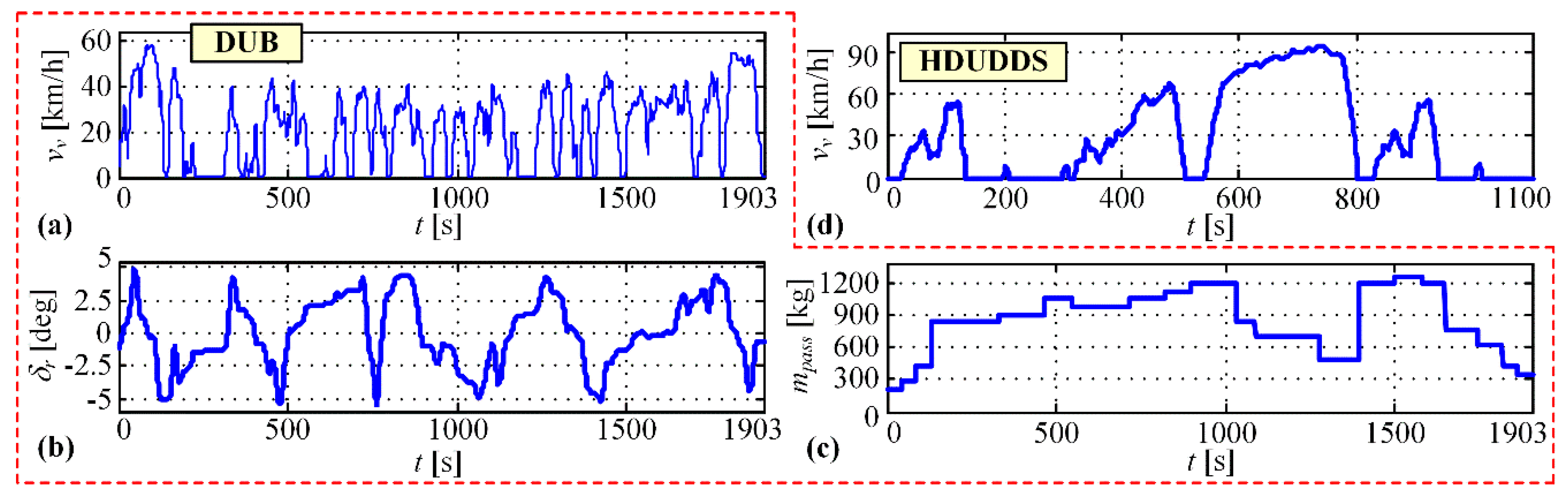
3.1. Considered Driving Cycles and Scenarios
3.2. Optimal Problem Formulation
3.3. Optimization Results
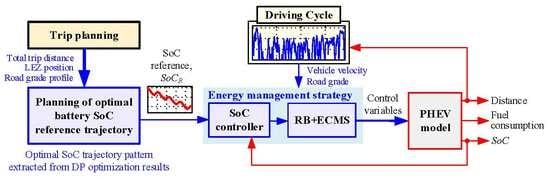
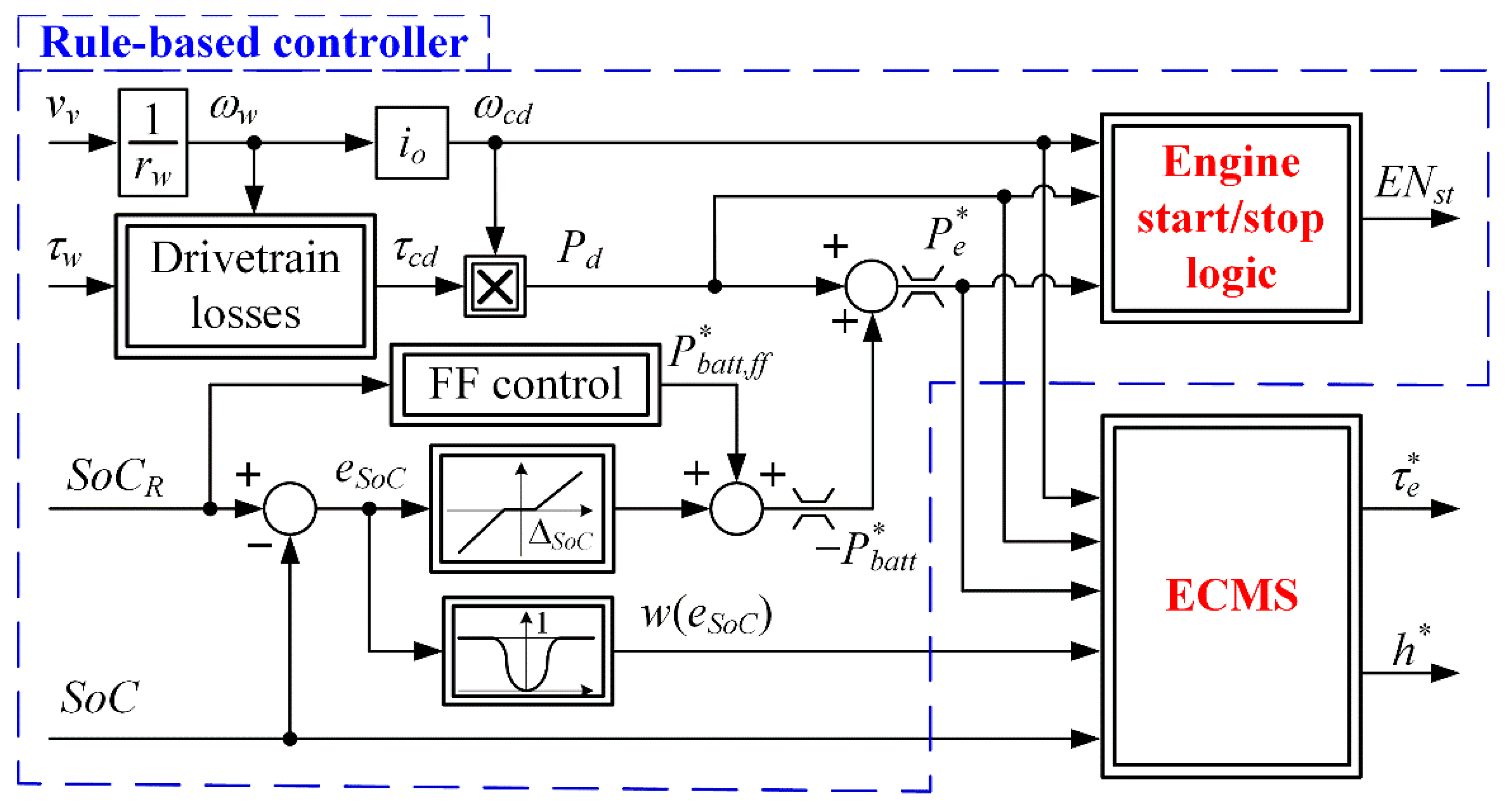
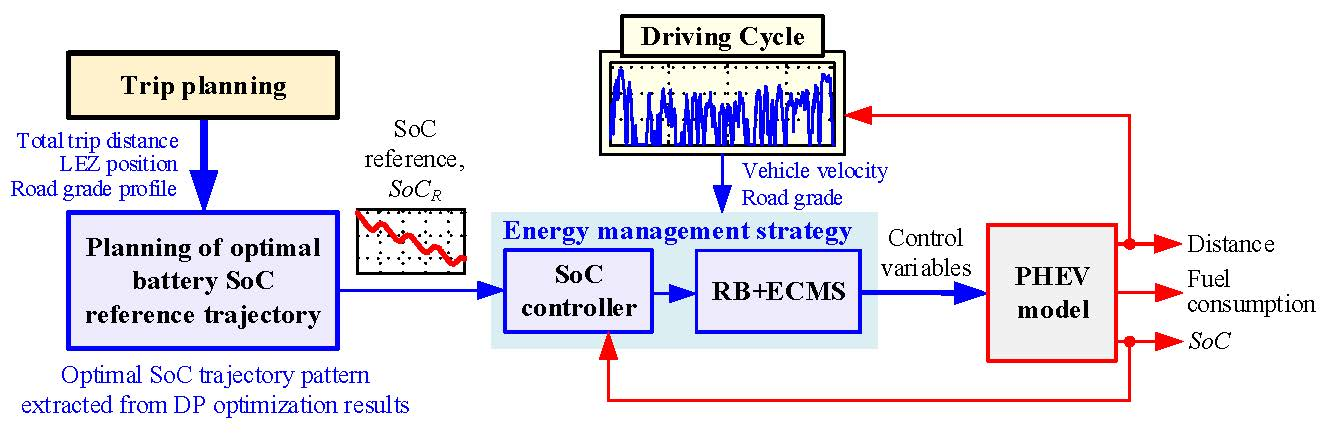
4. PHEV Powertrain Control Strategy
4.1. Basic Control Strategy
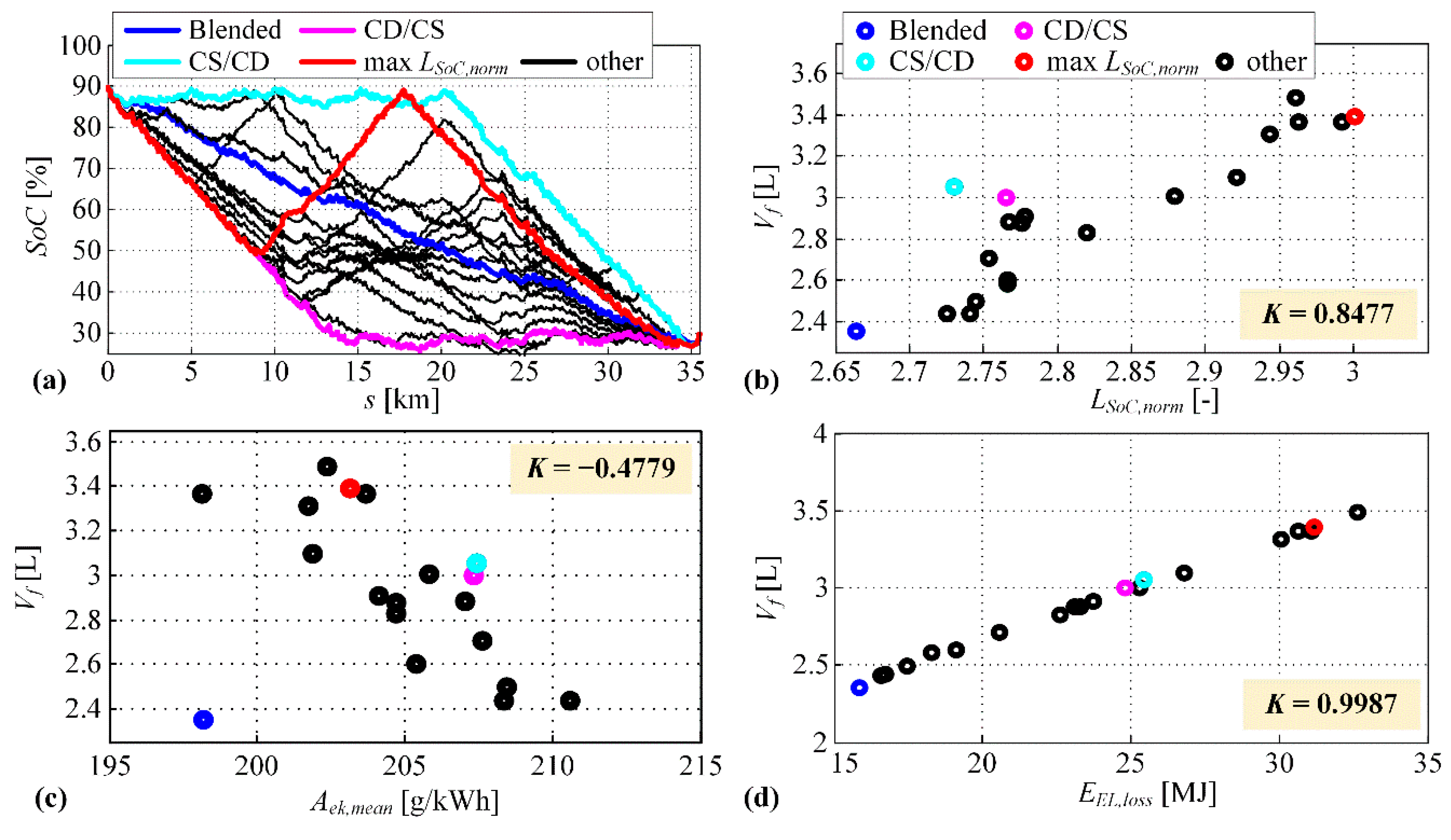
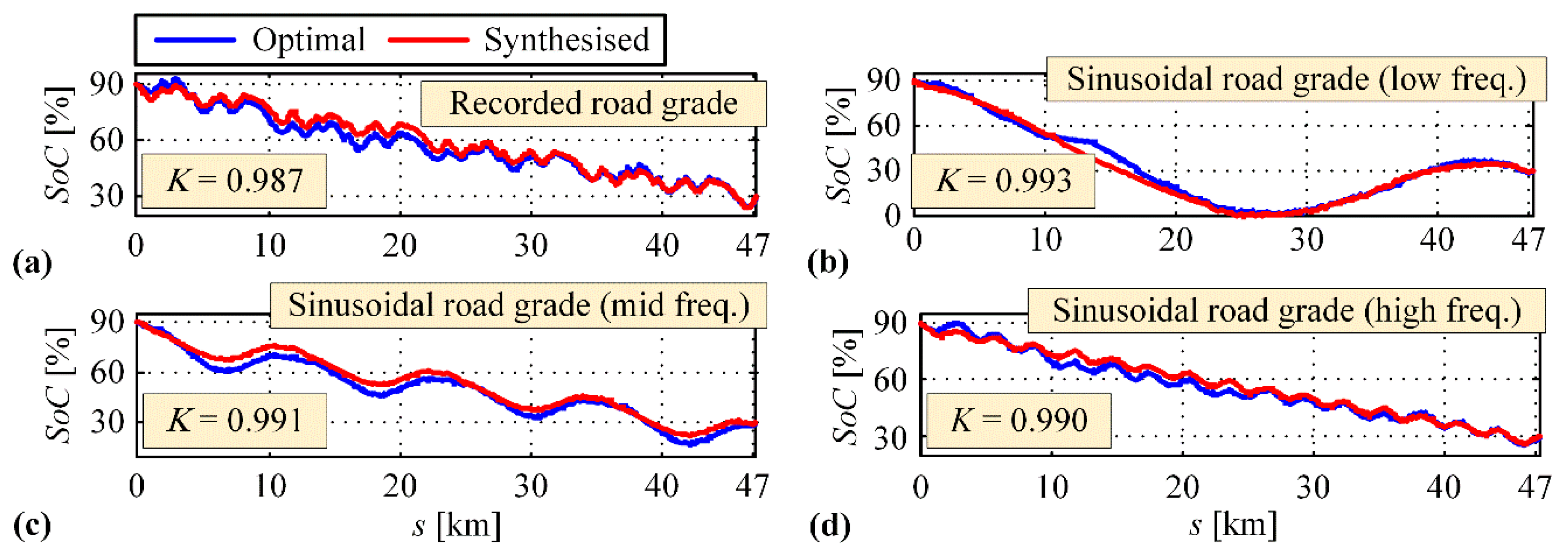
4.2. Synthesis of Optimal SoC Reference Trajectory
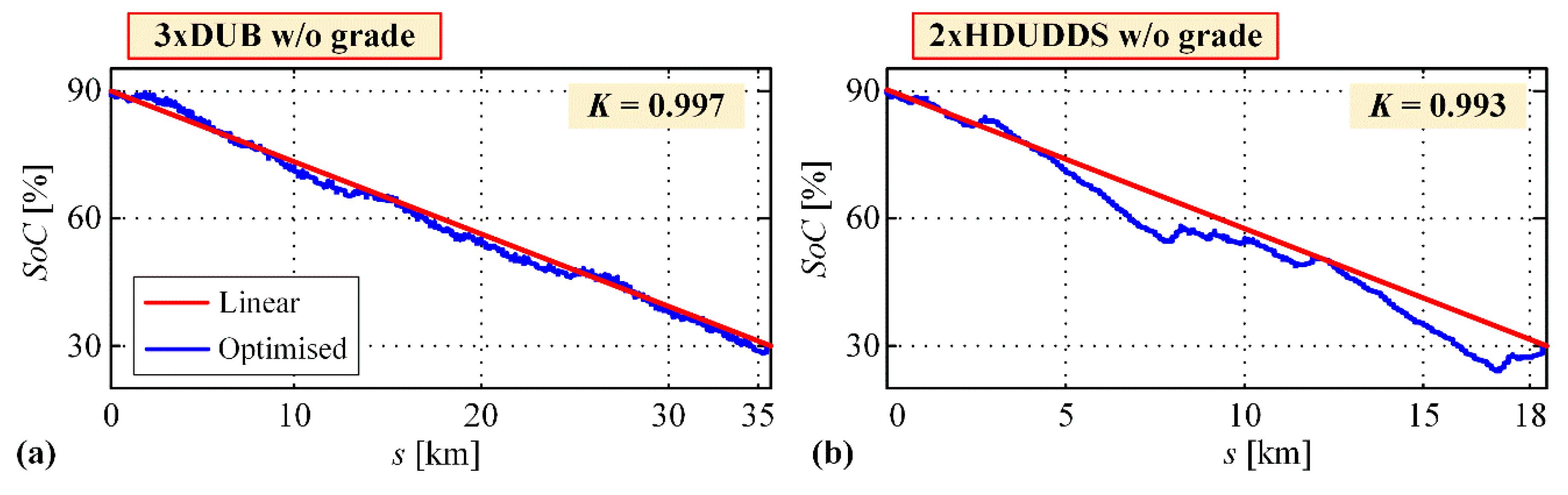
4.2.1. Scenario 1: Zero Road Grade and no LEZ Presence
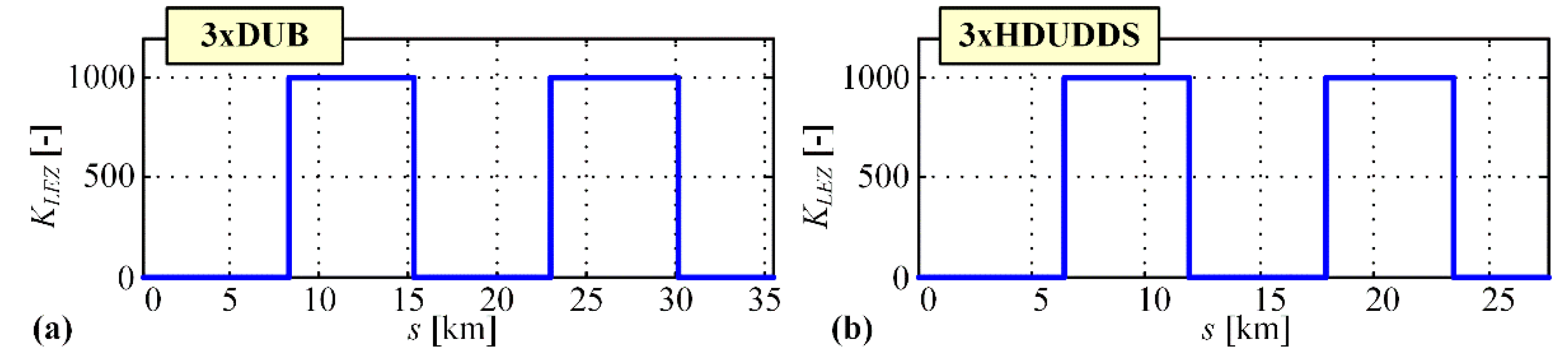
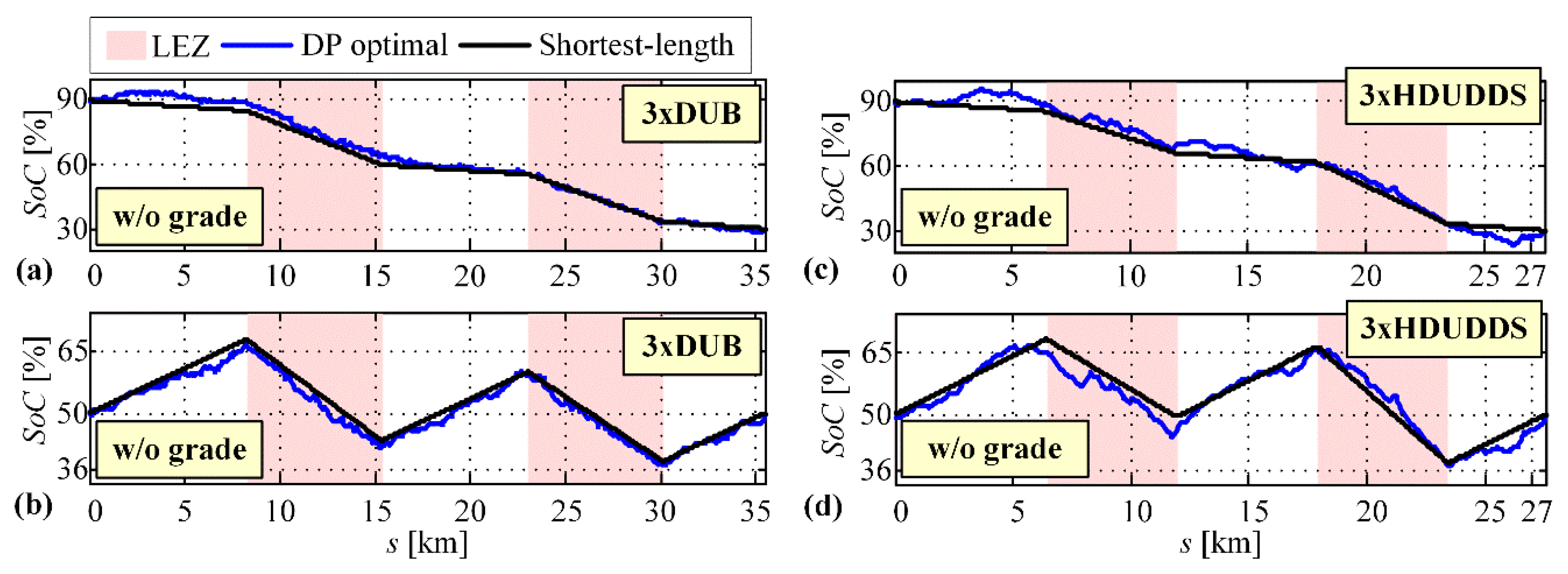
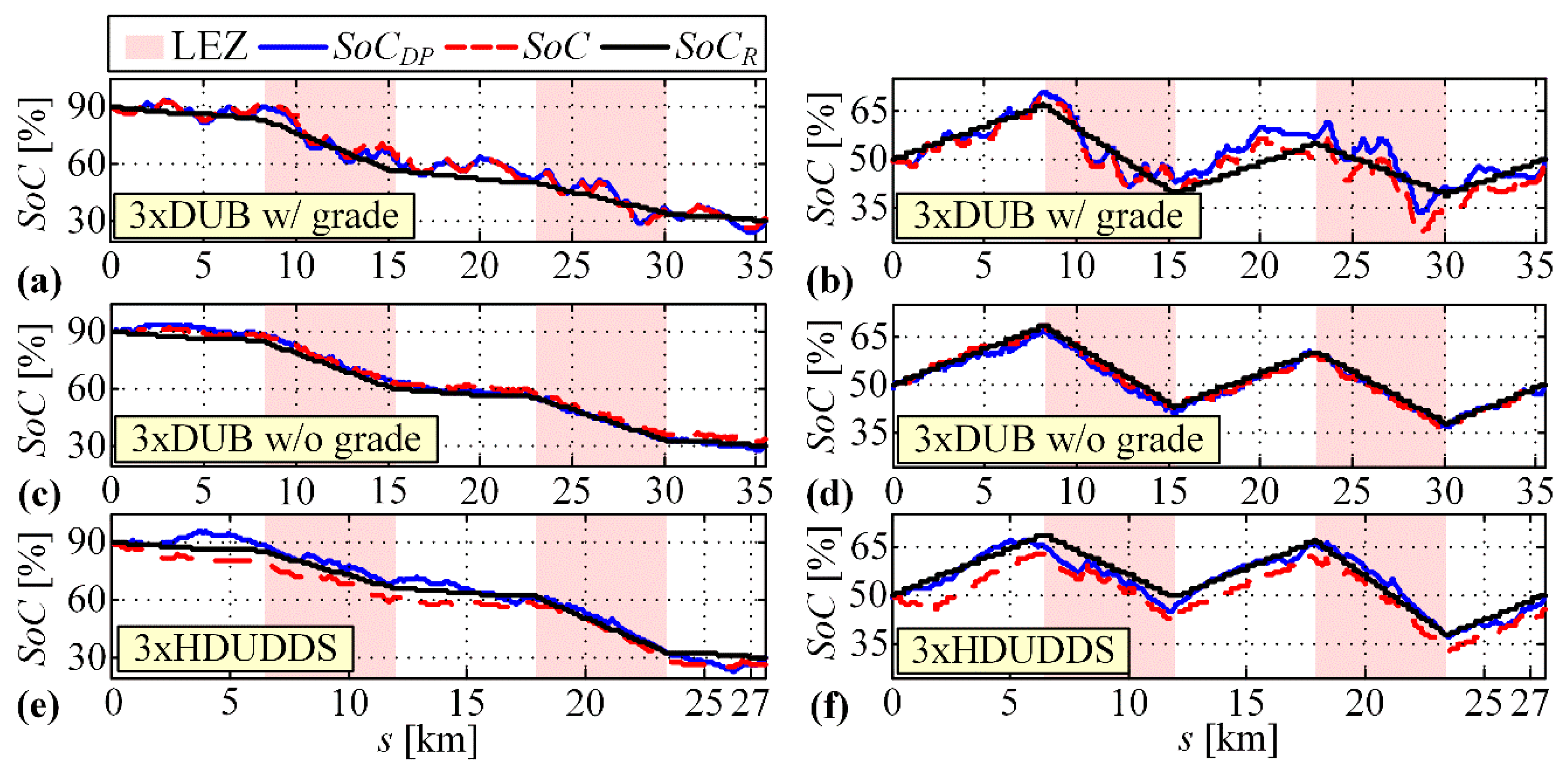
4.2.2. Scenario 2: Zero Road Grade and LEZ Presence
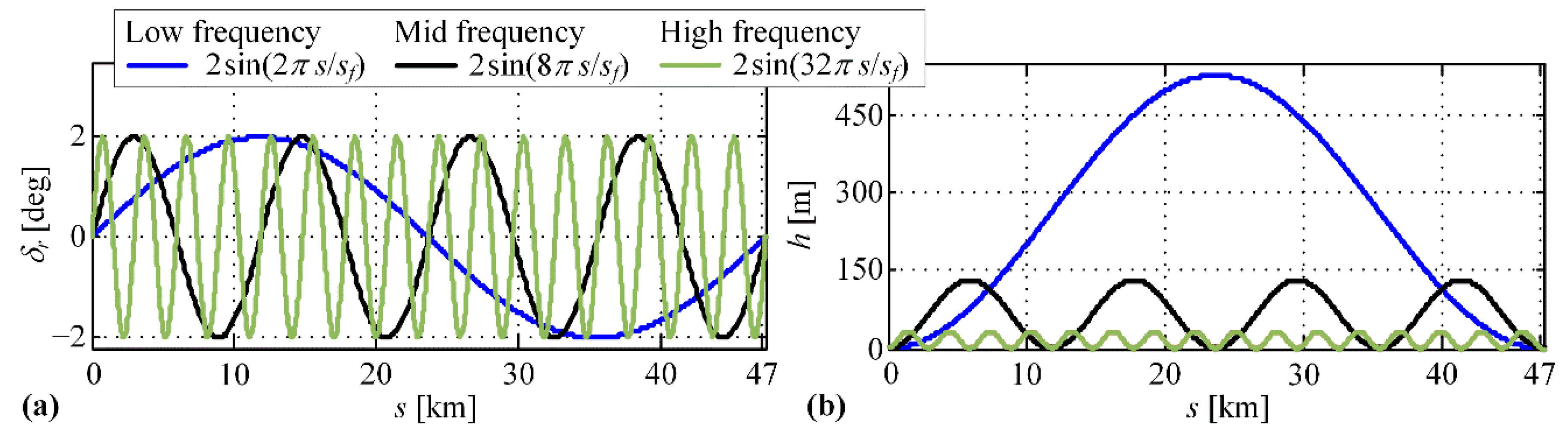
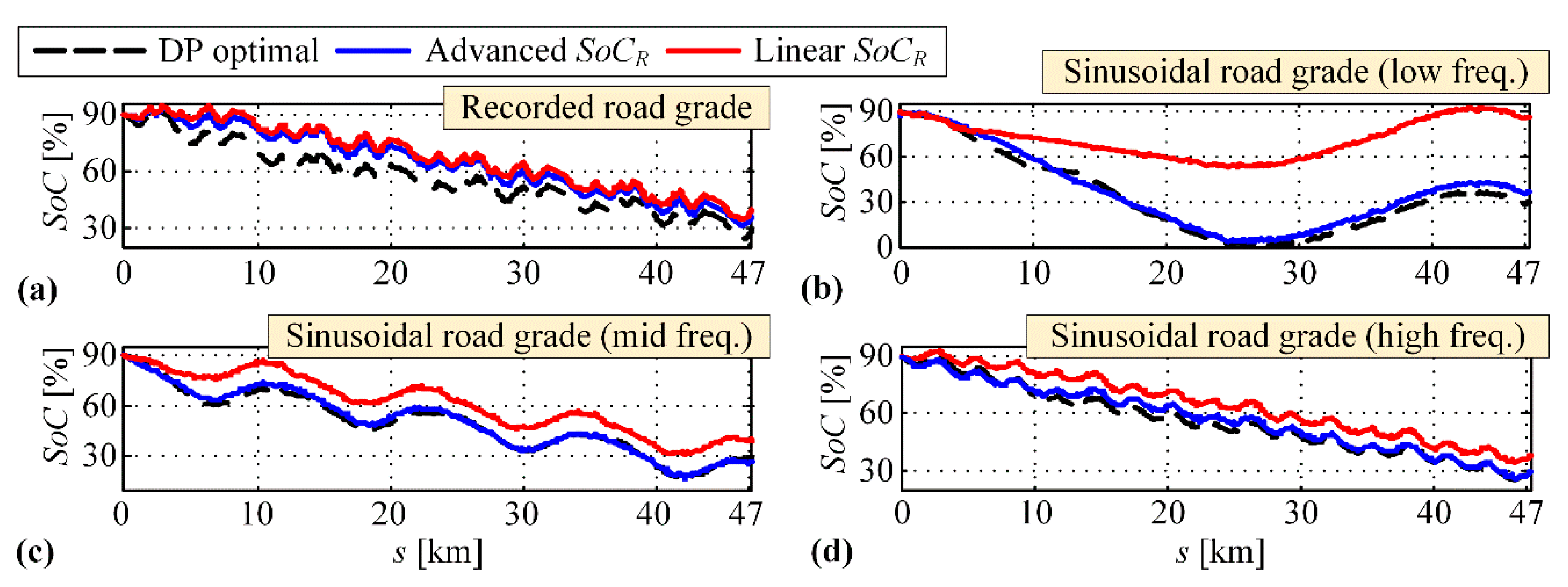
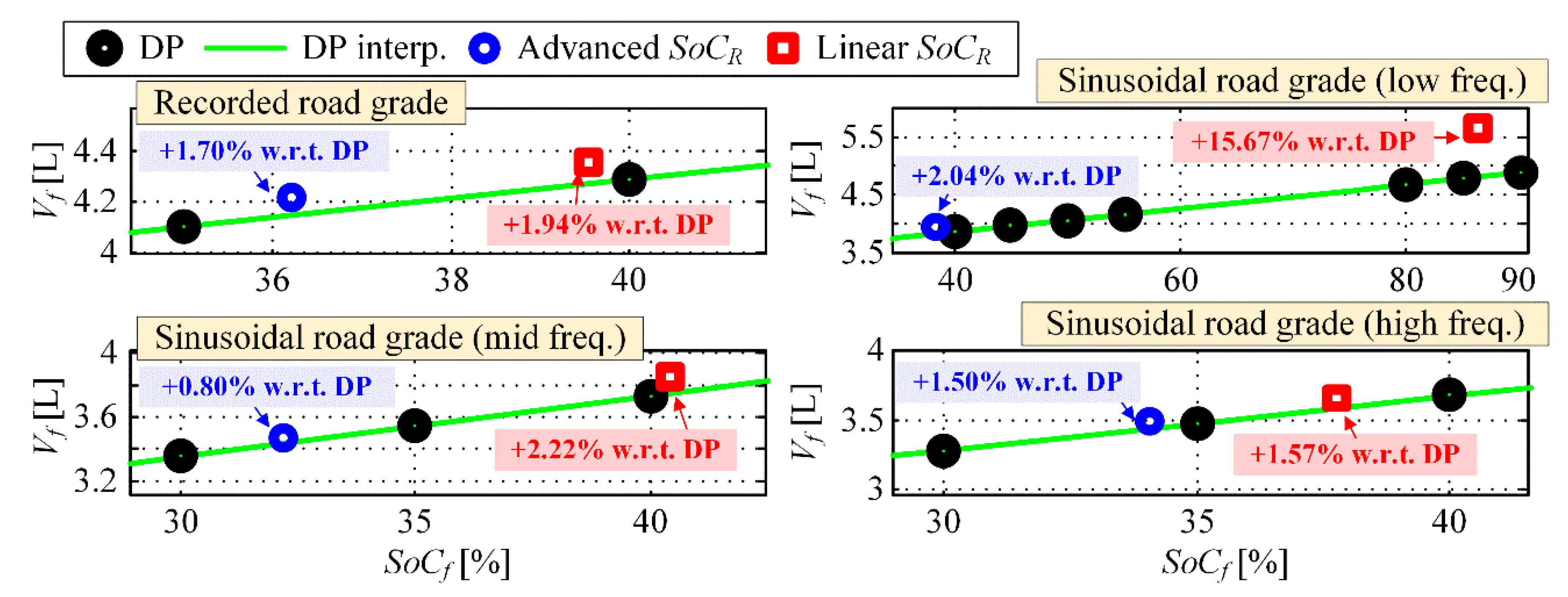
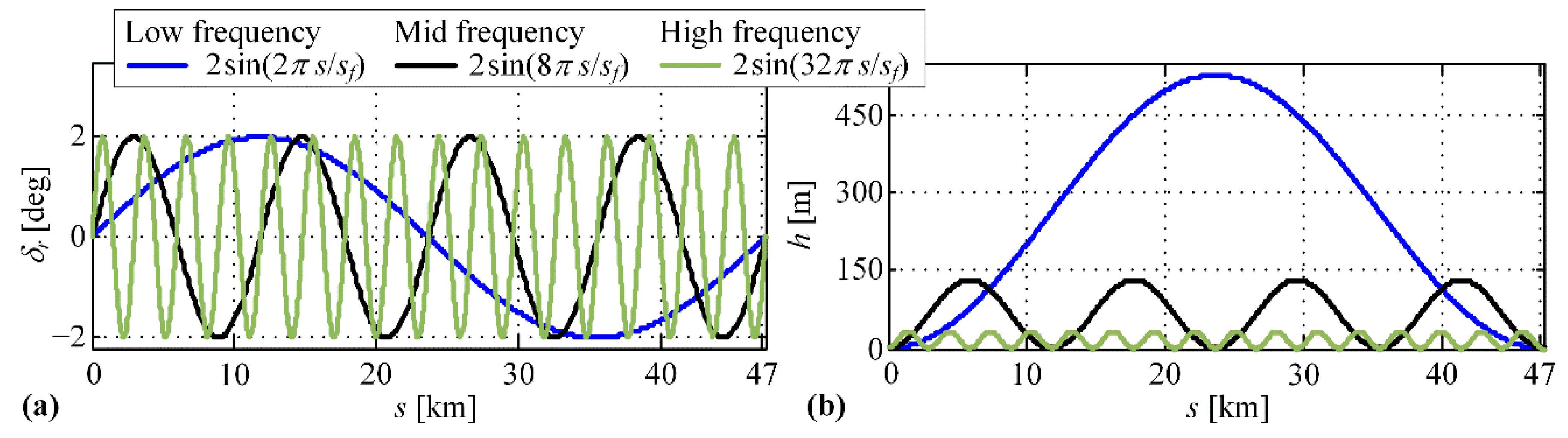
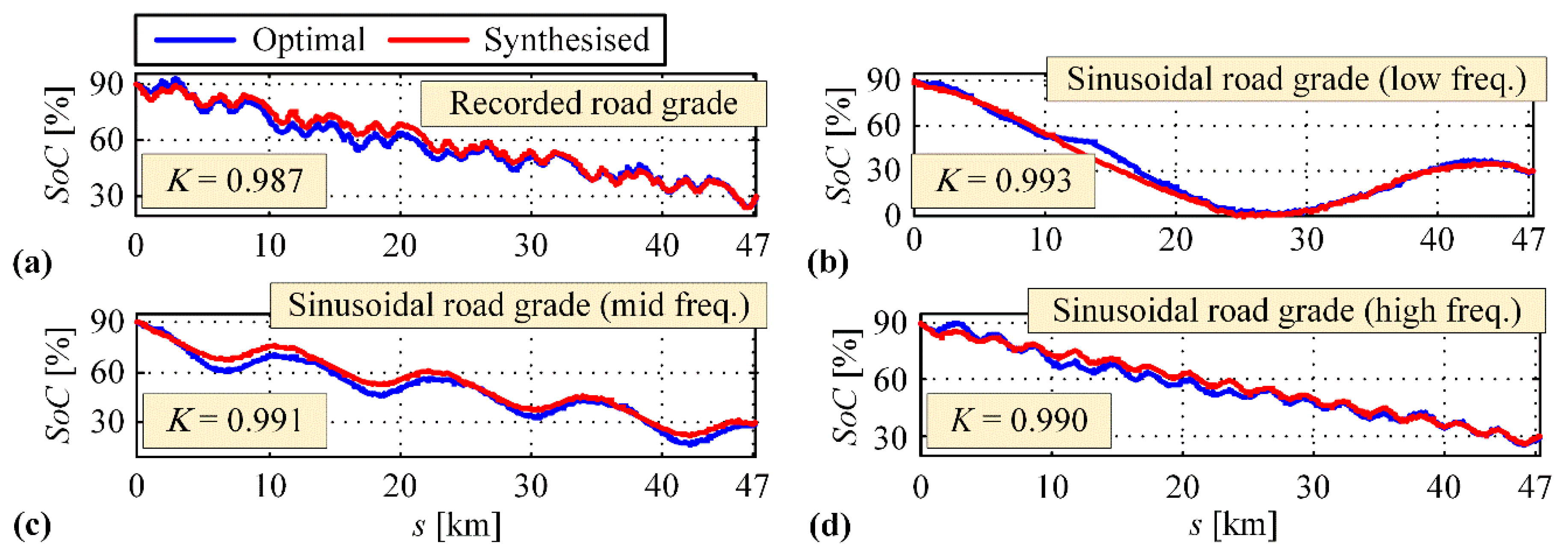
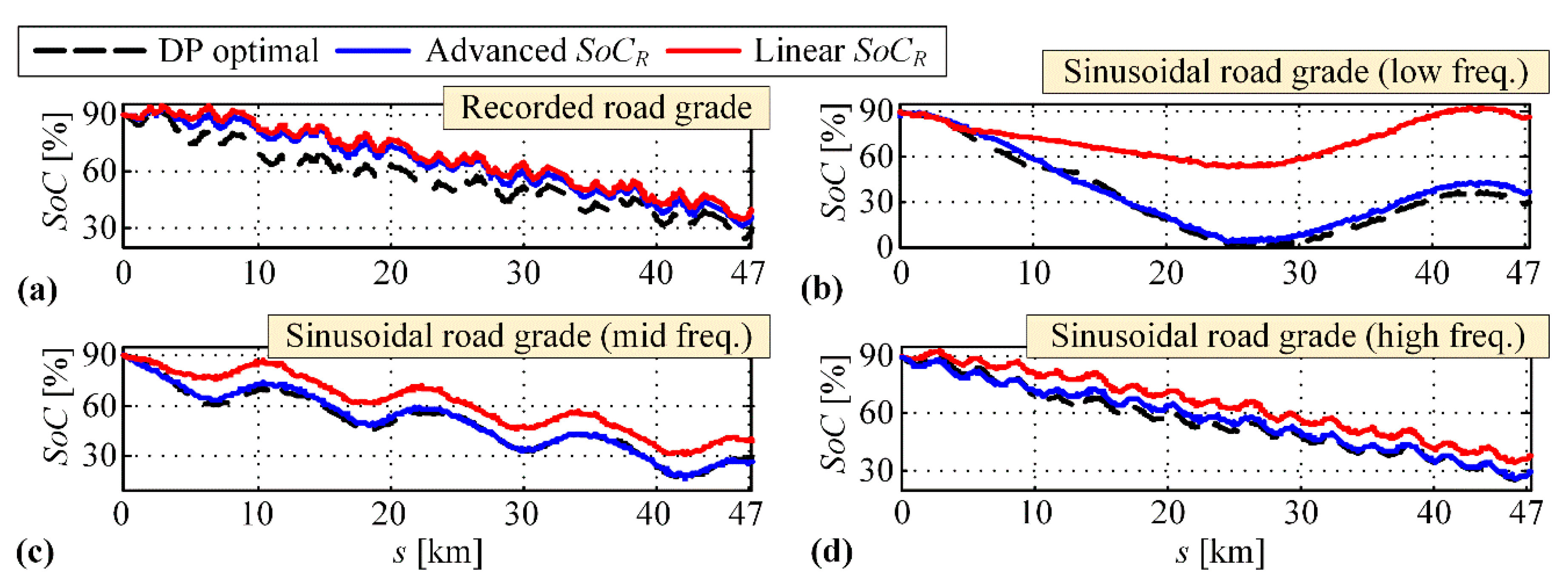
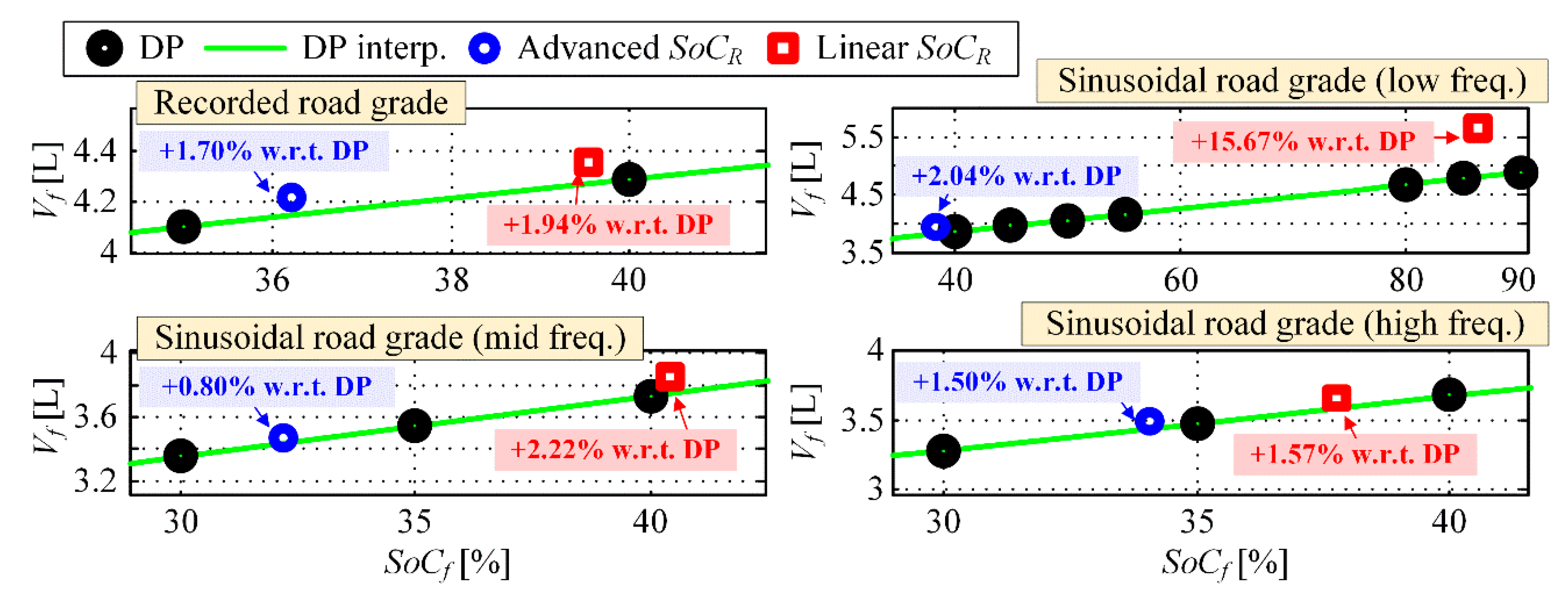
4.2.3. Scenario 3: Variable Road Grade and no LEZ Presence
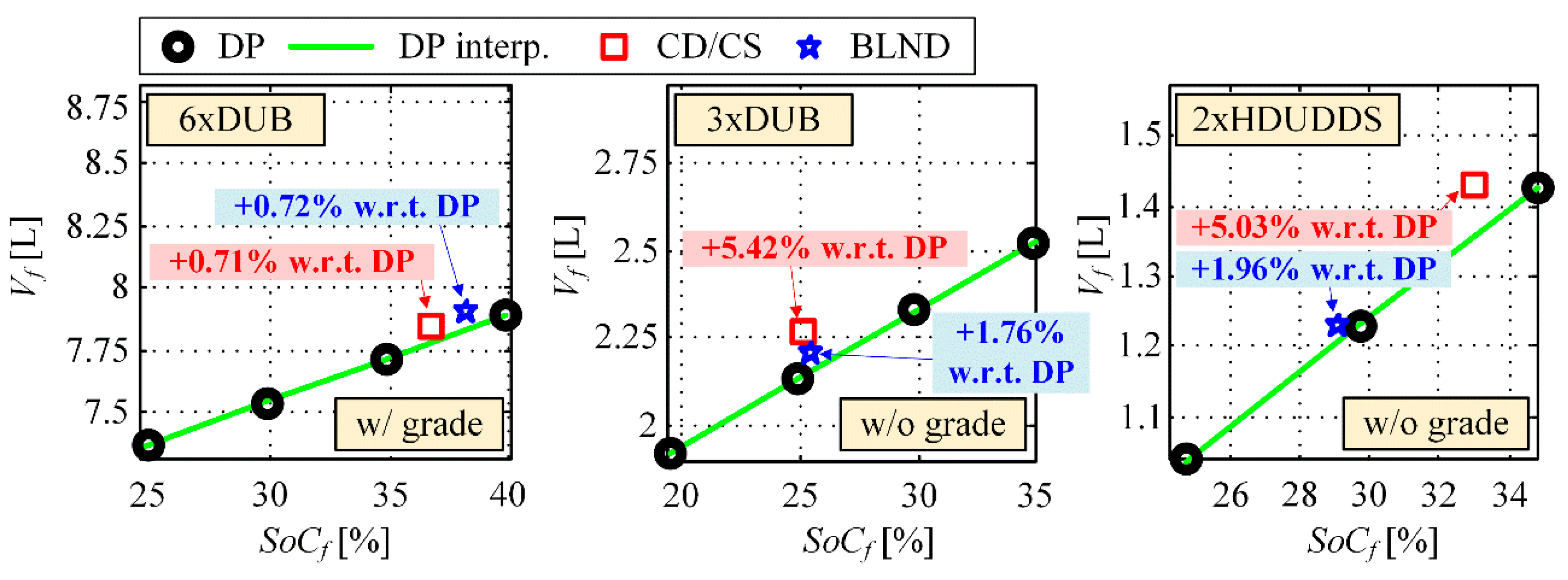
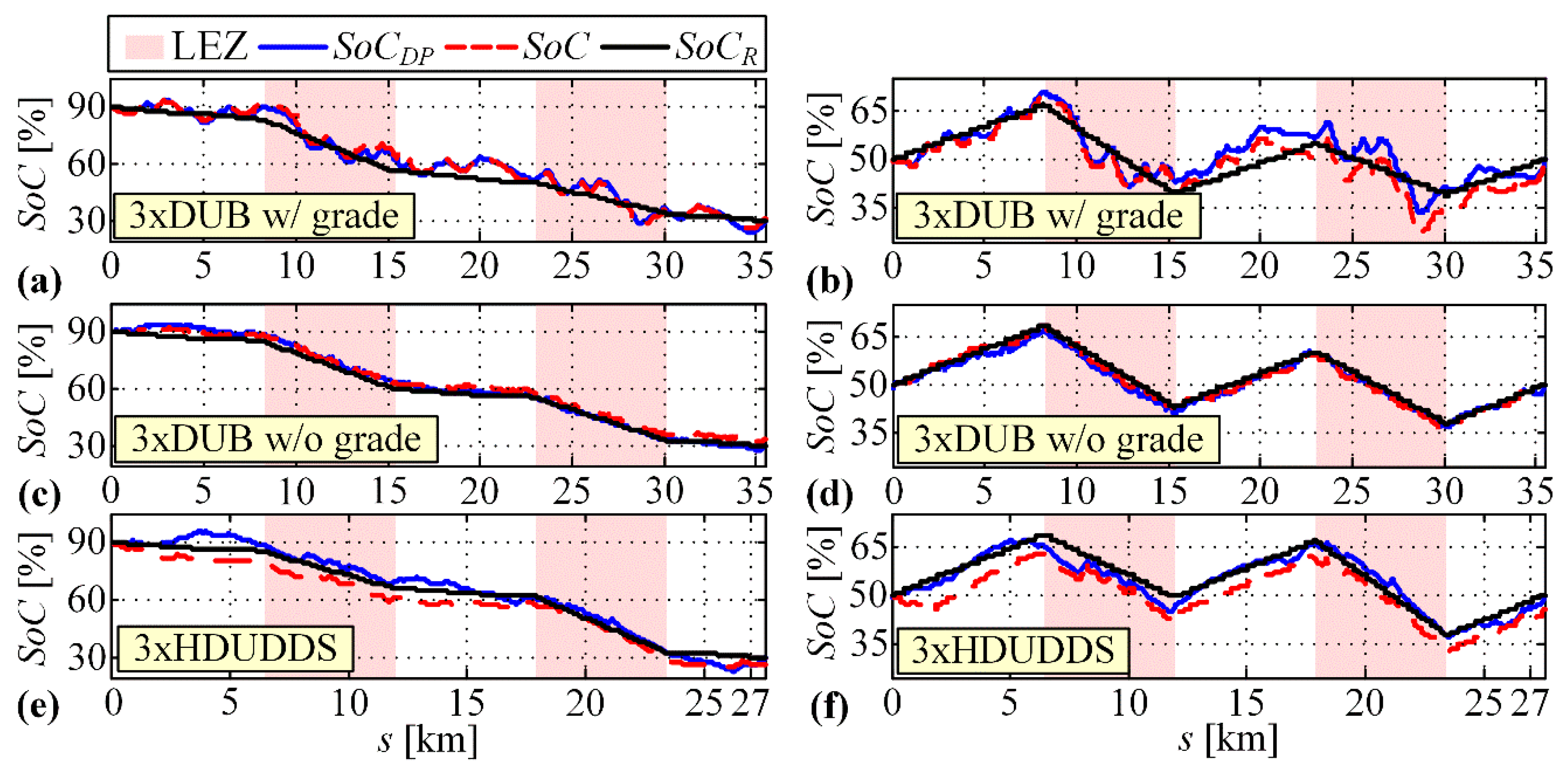
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. PHEV City Bus Parameters
A.1. Model Parameters
| Gear no. | 1. | 2. | 3. | 4. | 5. | 6. | 7. | 8. | 9. | 10. | 11. | 12. |
| Gear ratio | 14.94 | 11.73 | 9.04 | 7.09 | 5.54 | 4.35 | 3.44 | 2.70 | 2.08 | 1.63 | 1.27 | 1.00 |
A.2. DP Optimization Parameters
A.3. Control Strategy Parameters
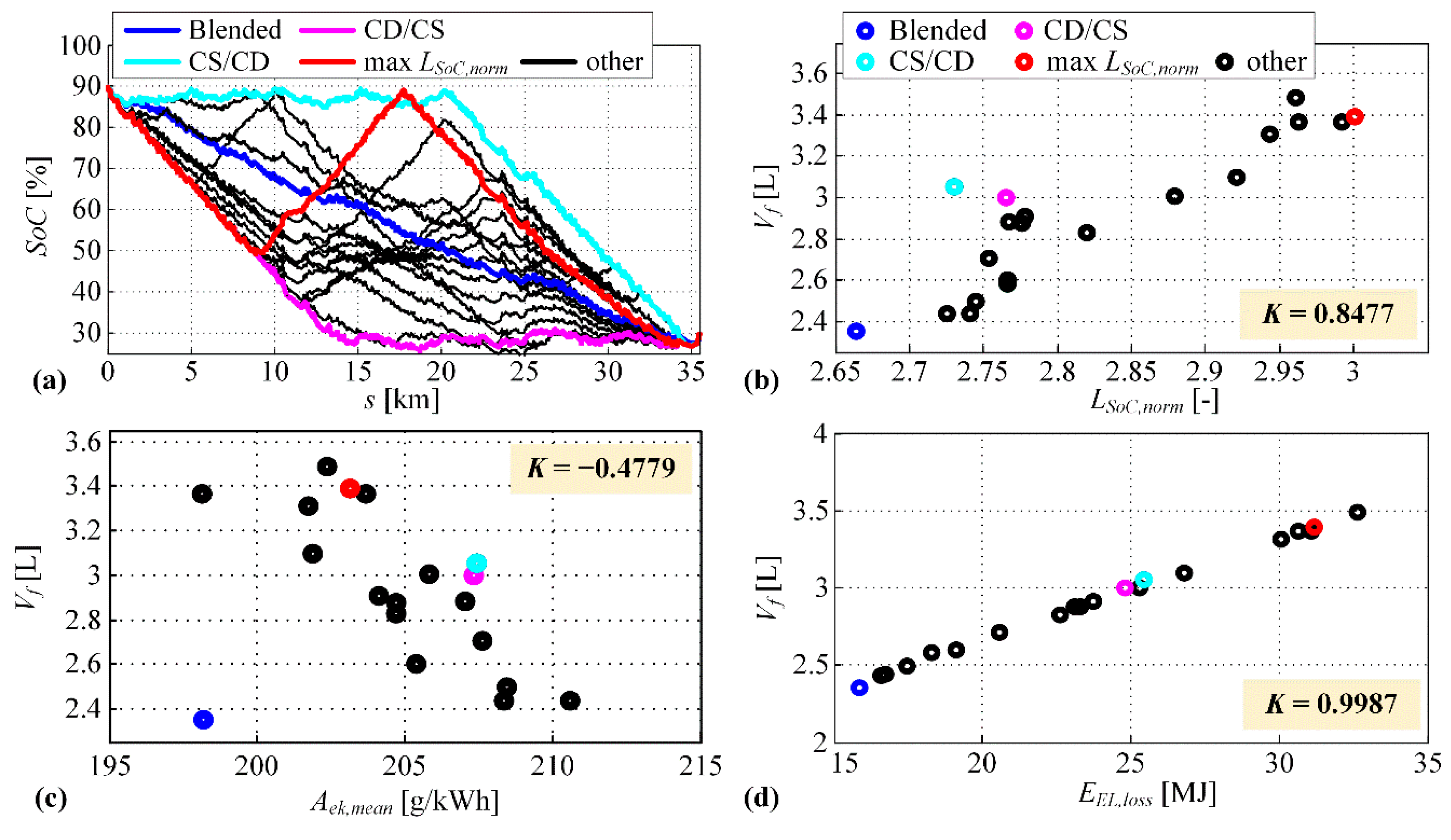
Appendix B. Analysis of Optimal SoC Trajectory Pattern
References
- Guzzella, L.; Sciaretta, A. Vehicle Propulsion Systems, 2nd ed.; Springer: Berlin, Germany, 2007. [Google Scholar]
- Škugor, B.; Cipek, M.; Deur, J. Control variables optimization and feedback control strategy design for the blended operating regime of an extended range electric vehicle. SAE Int. J. Altern. Powertrains 2014, 3, 152–162. [Google Scholar] [CrossRef]
- Trinko, D.A.; Wendt, E.A.; Asher, Z.D.; Peyfuss, M.; Volckens, J.; Quinn, J.C.; Bradley, T.H. An Adaptive Green Zone Strategy for Hybrid Electric Vehicle Control. In Proceedings of the ITEC 2018 IEEE Transportation Electrification Conference and Expo, Long Beach, CA, USA, 13–15 June 2018; pp. 385–388. [Google Scholar]
- Soldo, J.; Skugor, B.; Deur, J. Optimal Energy Management Control of a Parallel Plug-In Hybrid Electric Vehicle in the Presence of Low-Emission Zones. SAE Technical Paper 2019-01-1215. 2019. Available online: https://www.sae.org/publications/technical-papers/content/2019-01-1215/ (accessed on 6 October 2019). [CrossRef]
- Onori, S.; Tribioli, L. Adaptive Pontryagin’s Minimum Principle supervisory controller design for the plug-in hybrid GM Chevrolet Volt. Appl. Energy 2015, 147, 224–234. [Google Scholar] [CrossRef]
- Martinez, C.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy Management in Plug-in Hybrid Electric Vehicles: Recent Progress and a Connected Vehicles Perspective. IEEE Trans. Veh. Technol. 2017, 66, 4534–4549. [Google Scholar] [CrossRef]
- Yu, H.; Kuang, M.; McGee, R. Trip-oriented energy management control strategy for plug-in hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2014, 22, 1323–1336. [Google Scholar]
- Ambuhl, D.; Guzzella, L. Predictive reference signal generator for hybrid electric vehicles. IEEE Trans. Veh. Technol. 2009, 58, 4730–4740. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Qin, D.; Lei, Z. Energy management of plug-in hybrid electric vehicles using road grade preview. In Proceedings of the IET International Conference on Intelligent and Connected Vehicles (ICV 2016), Chongqing, China, 22–23 September 2016. [Google Scholar]
- Gaikwad, T.; Asher, Z.; Liu, K.; Huang, M.; Kolmanovsky, I. Vehicle Velocity Prediction and Energy Management Strategy Part 2: Integration of Machine Learning Vehicle Velocity Prediction with Optimal Energy Management to Improve Fuel Economy. Available online: https://www.sae.org/publications/technical-papers/content/2019-01-1212/ (accessed on 6 October 2019).
- Xie, S.; Li, H.; Xin, Z.; Liu, T.; Wei, L. A pontryagin minimum principle-based adaptive equivalent consumption minimum strategy for a plug-in hybrid electric bus on a fixed route. Energies 2017, 10, 1379. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Xin, Z.; Brighton, J. Pontryagin’s Minimum Principle based model predictive control of energy management for a plug-in hybrid electric bus. Appl. Energy 2019, 236, 893–905. [Google Scholar] [CrossRef]
- Bouwman, K.R.; Pham, T.H.; Wilkins, S.; Hofman, T. Predictive Energy Management Strategy Including Traffic Flow Data for Hybrid Electric Vehicles. IFAC-PapersOnLine 2017, 50, 10046–10051. [Google Scholar] [CrossRef]
- Sun, C.; Moura, S.J.; Hu, X.; Hedrick, J.K.; Sun, F. Dynamic Traffic Feedback Data Enabled Energy Management in Plug-in Hybrid Electric Vehicles. IEEE Trans. Control Syst. Technol. 2015, 23, 1075–1086. [Google Scholar]
- Soldo, J.; Škugor, B.; Deur, J. Optimal Energy Management and Shift Scheduling Control of a Parallel Plug-in Hybrid Electric Vehicle. In Proceedings of the Powertrain Modelling and Control Conference (PMC 2018), Loughborough, UK, 10–11 September 2018. [Google Scholar]
- VOLVO 7900 ELECTRIC HYBRID SPECIFICATIONS. Available online: https://www.volvobuses.co.uk/en-gb/our-offering/buses/volvo-7900-electric-hybrid/specifications.html (accessed on 6 October 2019).
- Cipek, M.; Pavković, D.; Petrić, J.Š. A control-oriented simulation model of a power-split hybrid electric vehicle. Appl. Energy 2013, 101, 121–133. [Google Scholar] [CrossRef]
- Staunton, R.H.; Ayers, C.W.; Marlino, L.D.; Chiasson, J.N.; Burress, B.A. Evaluation of 2004 Toyota Prius Hybrid Electric Drive System; Oak Ridge National Laboratory (ORNL): Oak Ridge, TN, USA, 2005. [Google Scholar]
- Yuan, Z.; Hou, S.-H.; Li, D.; Wei, G.; Hu, X. Optimal Energy Control Strategy Design for a Hybrid Electric Vehicle. Discret. Dyn. Nat. Soc. 2013, 132064. [Google Scholar]
- EVO ELECTRIC LTD CATALOGUE, AF-230 Motor/Generator. Available online: http://www.fordmax.in.ua/wp-content/uploads/2014/12/AF-230-Spec-Sheet-V1.pdf (accessed on 6 October 2019).
- Cipek, M.; Petrić, J.; Pavković, D.; Kučinić, D. A Hydraulic Component Scalability Tool based on Willans Line Method towards the Optimal Design of Hybrid Hydraulic Vehicles. In Proceedings of the 12th Conference on Sustainable Development of Energy, Water and Environment Systems (SDEWES 2017), Dubrovnik, Croatia, 4–8 October 2017. [Google Scholar]
- Andre, D.; Meiler, M.; Steiner, K.; Wimmer, C.; Soczka-Guth, T.; Sauer, D.U. Characterization of high-power lithium-ion batteries by electrochemical impedance spectroscopy. I. Experimental investigation. J. Power Sources 2011, 196, 5334–5341. [Google Scholar] [CrossRef]
- Bin, Y.; Li, Y.; Feng, N. Nonlinear dynamic battery model with boundary and scanning hysteresis. In Proceedings of the ASME 2009 Dynamic Systems and Control Conference, Hollywood, CA, USA, 12–14 October 2009; pp. 245–252. [Google Scholar]
- Škugor, B.; Deur, J.; Cipek, M.; Pavković, D. Design of a power-split hybrid electric vehicle control system utilizing a rule-based controller and an equivalent consumption minimization strategy. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 631–648. [Google Scholar] [CrossRef]
- Škugor, B.; Hrgetić, M.; Deur, J. GPS measurement-based road grade reconstruction with application to electric vehicle simulation and analysis. In Proceedings of the 11th Conference on Sustainable Development of Energy, Water and Environment Systems (SDEWES 2015), Dubrovnik, Croatia, 27 September–2 October 2015. [Google Scholar]
- Bellman, R.E.; Dreyfus, S.E. Applied Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1962. [Google Scholar]
- Cipek, M.; Škugor, B.; Čorić, M.; Kasać, J.; Deur, J. Control variable optimisation for an extended range electric vehicle. Int. J. Powertrains 2016, 5, 30. [Google Scholar] [CrossRef]
- Škugor, B.; Soldo, J.; Deur, J. Analysis of Optimal Battery State-of-Charge Trajectory for Blended Regime of Plug-in Hybrid Electric Vehicle. In Proceedings of the International Electric Vehicle Symposium & Exhibition (EVS32), Lyon, France, 19–22 May 2019. [Google Scholar]
- Paganelli, G.; Delprat, S.; Guerra, T.M.; Rimaux, J.; Santin, J.J. Equivalent consumption minimization strategy for parallel hybrid powertrains. Proc. IEEE Veh. Technol. Conf. 2002, 4, 2076–2081. [Google Scholar]
- Liu, K.; Asher, Z.; Gong, X.; Huang, M.; Kolmanovsky, I. Vehicle Velocity Prediction and Energy Management Strategy Part 1: Deterministic and Stochastic Vehicle Velocity Prediction Using Machine Learning. Available online: https://www.sae.org/publications/technical-papers/content/2019-01-1051/ (accessed on 6 October 2019).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SoCi = 90%, Target SoCf = 30% | RB+ECMS vs. DP Fuel Consumption [L] | ||
| Exact ΔSoCLEZ,Σ | Average ΔSoCLEZ,Σ | Doubled ΔSoCLEZ,Σ | |
| 3xDUB w/ grade | 2.83 vs. 2.80 (+0.9%) | 2.97 vs. 2.94 (+1.0%) | 3.01 vs. 2.98 (+1.1%) |
| 3xDUB w/o grade | 2.59 vs. 2.56 (+1.1%) | 2.60 vs. 2.57 (+1.2%) | 2.63 vs. 2.56 (+2.6%) |
| 3xHDUDDS | 3.15 vs. 3.08 (+2.2%) | 3.10 vs. 3.02 (+2.5%) | 3.11 vs. 3.02 (+3.0%) |
| SoCi = 50%, Target SoCf = 50% | RB+ECMS vs. DP Fuel Consumption [L] | ||
| Exact ΔSoCZ,Σ | Average ΔSoCLEZ,Σ | Doubled ΔSoCLEZ,Σ | |
| 3xDUB w/ grade | 5.02 vs. 4.99 (+0.6%) | 5.01 vs. 4.98 (+0.5%) | 5.16 vs. 5.08 (+1.5%) |
| 3xDUB w/o grade | 5.01 vs. 4.95 (+1.2%) | 5.10 vs. 5.04 (+1.3%) | 5.16 vs. 5.02 (+2.8%) |
| 3xHDUDDS | 5.72 vs. 5.66 (+1.1%) | 5.68 vs. 5.61 (+1.3%) | 5.72 vs. 5.65 (+1.2%) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soldo, J.; Škugor, B.; Deur, J. Synthesis of Optimal Battery State-of-Charge Trajectory for Blended Regime of Plug-in Hybrid Electric Vehicles in the Presence of Low-Emission Zones and Varying Road Grades. Energies 2019, 12, 4296. https://doi.org/10.3390/en12224296
Soldo J, Škugor B, Deur J. Synthesis of Optimal Battery State-of-Charge Trajectory for Blended Regime of Plug-in Hybrid Electric Vehicles in the Presence of Low-Emission Zones and Varying Road Grades. Energies. 2019; 12(22):4296. https://doi.org/10.3390/en12224296
Chicago/Turabian StyleSoldo, Jure, Branimir Škugor, and Joško Deur. 2019. "Synthesis of Optimal Battery State-of-Charge Trajectory for Blended Regime of Plug-in Hybrid Electric Vehicles in the Presence of Low-Emission Zones and Varying Road Grades" Energies 12, no. 22: 4296. https://doi.org/10.3390/en12224296
APA StyleSoldo, J., Škugor, B., & Deur, J. (2019). Synthesis of Optimal Battery State-of-Charge Trajectory for Blended Regime of Plug-in Hybrid Electric Vehicles in the Presence of Low-Emission Zones and Varying Road Grades. Energies, 12(22), 4296. https://doi.org/10.3390/en12224296