A Hybrid Methodology for Analyzing the Performance of Induction Motors with Efficiency Improvement by Specific Commercial Measures

 ,
,  ,
, 
Abstract
:1. Introduction
2. Hybrid Methodology
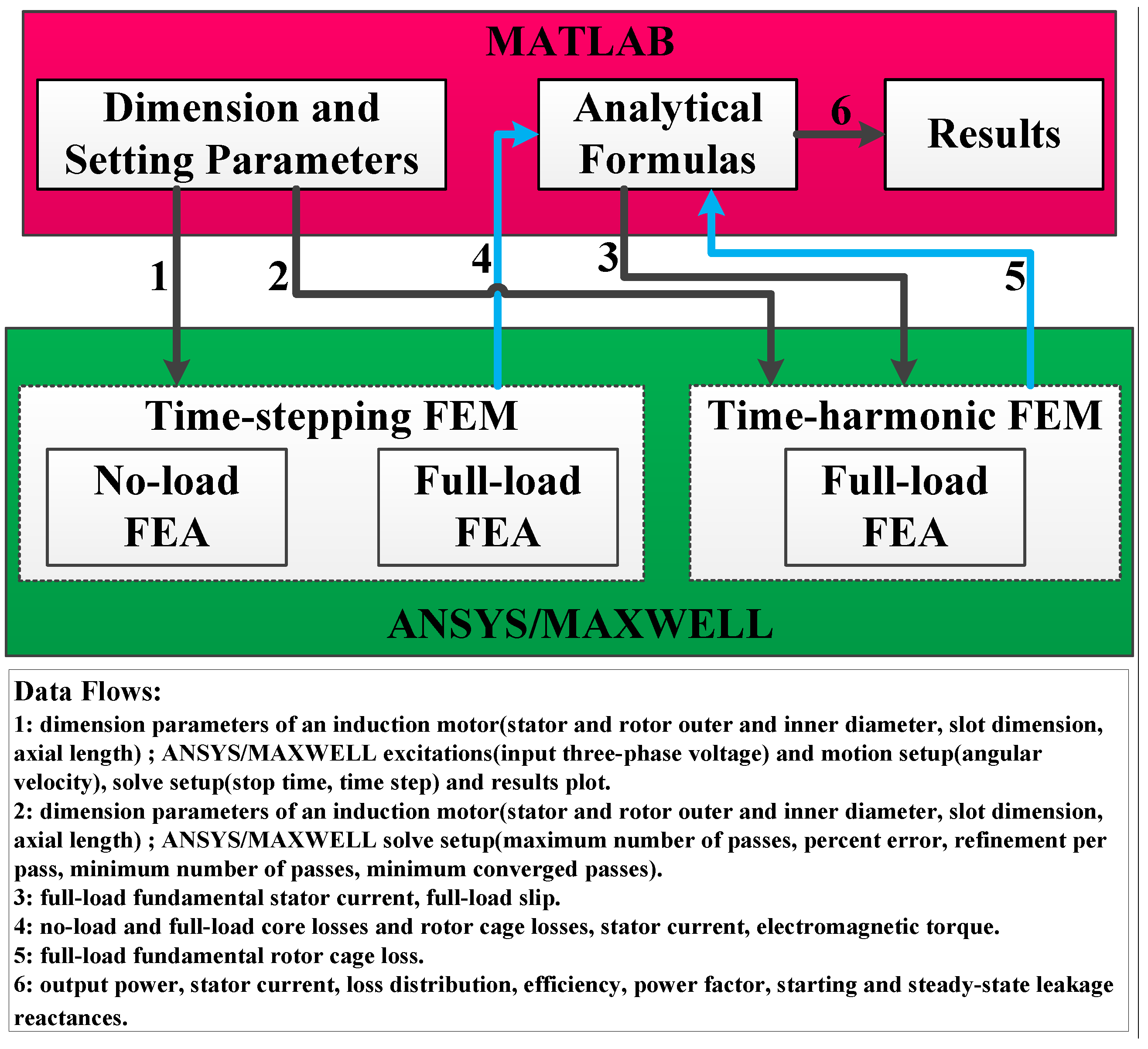
2.1. Program Structure
2.2. Full-Load Performance Calculation
- (1)
- Assuming rotating speeds n1 and n2 (n1 ≠ n2, unit: rpm) that are a little less than the synchronous speed as the input speeds, calculate their output torques T1 and T2 by the time-stepping FEM and the empirical equation [21], respectively. Note that output torque Tj is calculated by:In Equation (5), p denotes the number of pole pairs, D1out denotes the stator outer diameter and its unit is m, Tem denotes the electromagnetic torque computed by the time-stepping FEM. If:then the speed fulfilling Equation (6) is the full-load speed and the algorithm goes to Step 4; otherwise, subscript i = 3 and the algorithm goes to Step 2. In Equation (6), Tn denotes the full-load torque 70.8 Nm corresponding to 11 kW output power and ε denotes the allowable error.
- (2)
- Calculate the speed ni by:then calculate the output torque Ti (i = 3, 4, 5, …) by the time-stepping FEM and (5).
- (3)
- If:then ni is the full-load speed and the algorithm proceeds to Step 4; otherwise i = i + 1 and the algorithm goes to Step 2.
- (4)
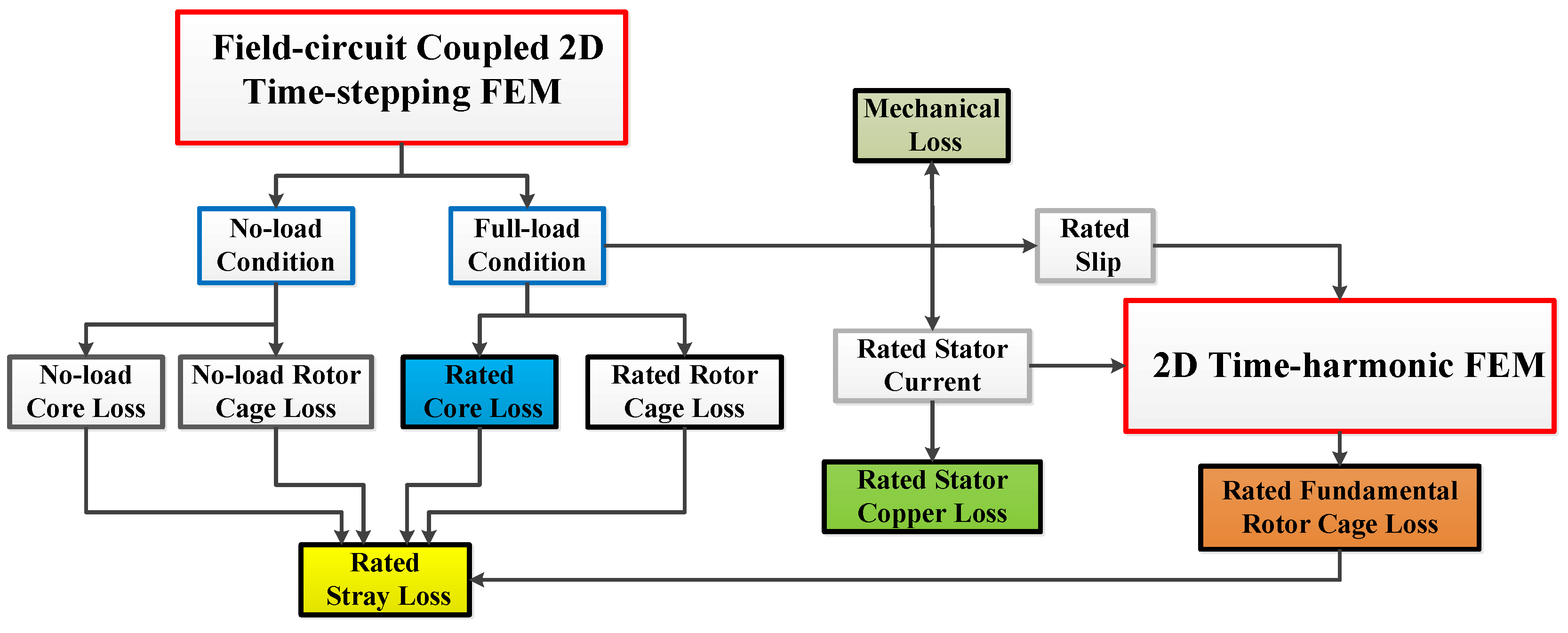
- Using the full-load speed calculate the full-load results. By solving the electromagnetic equations coupled to the primary voltage equation, they are obtained that the stator current I1m at each phase m (m = A, B, C.), and the current density of the rotor bar Jr. Then the copper loss of stator windings and the total eddy current loss of the rotor squirrel cage on full-load condition can be calculated. The full-load core loss and no-load core loss are computed based on the magnetic flux.
2.3. Overload and Starting Performance Calculation
3. Specific Commercial Measures for Efficiency Improvement
- (1)
- Current density of inner-Δ winding must be equal to the outer-Y.
- (2)
- Number of turns in series of inner-Δ winding equal to square root of three times as outer-Y windings.
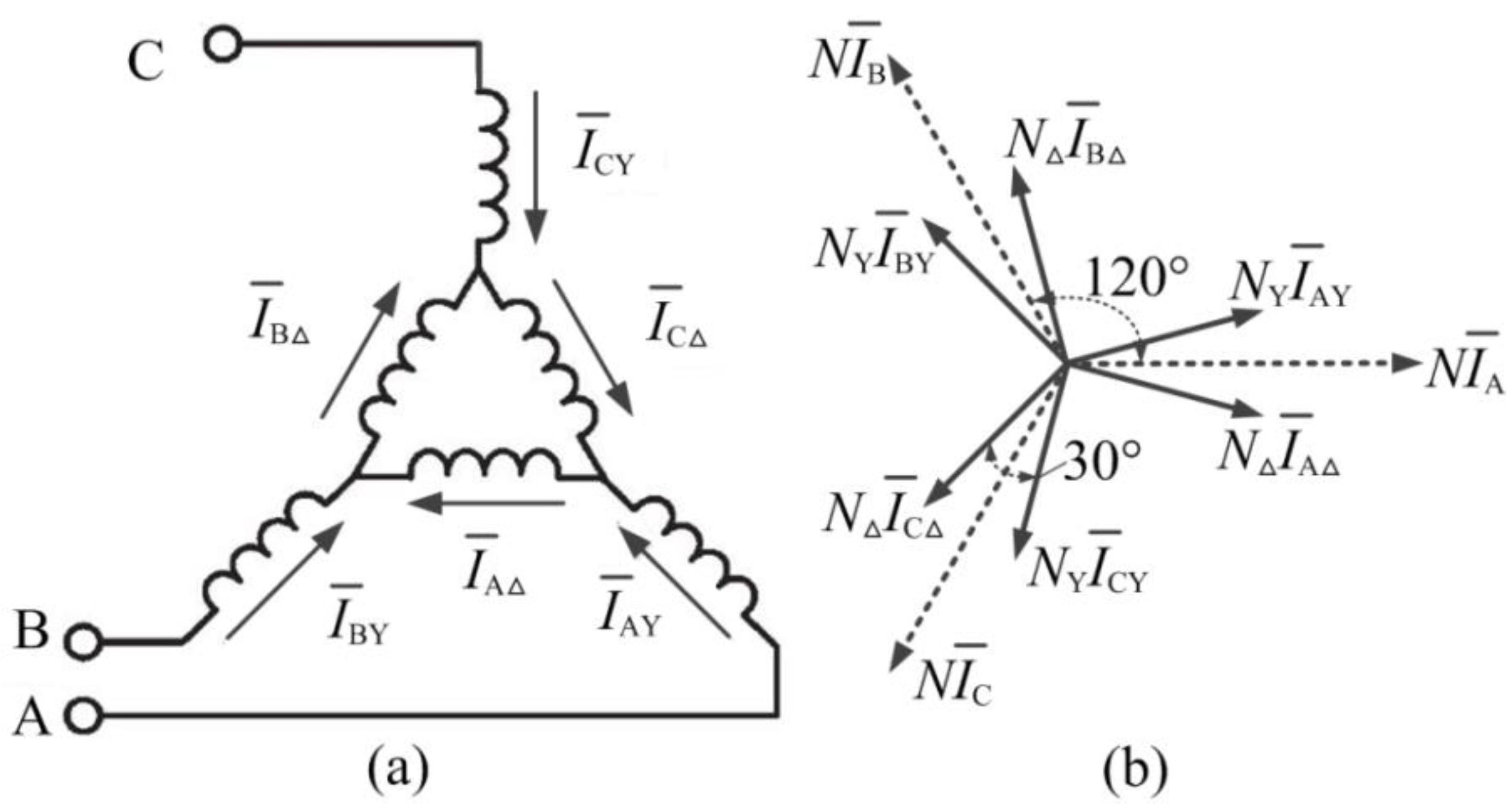
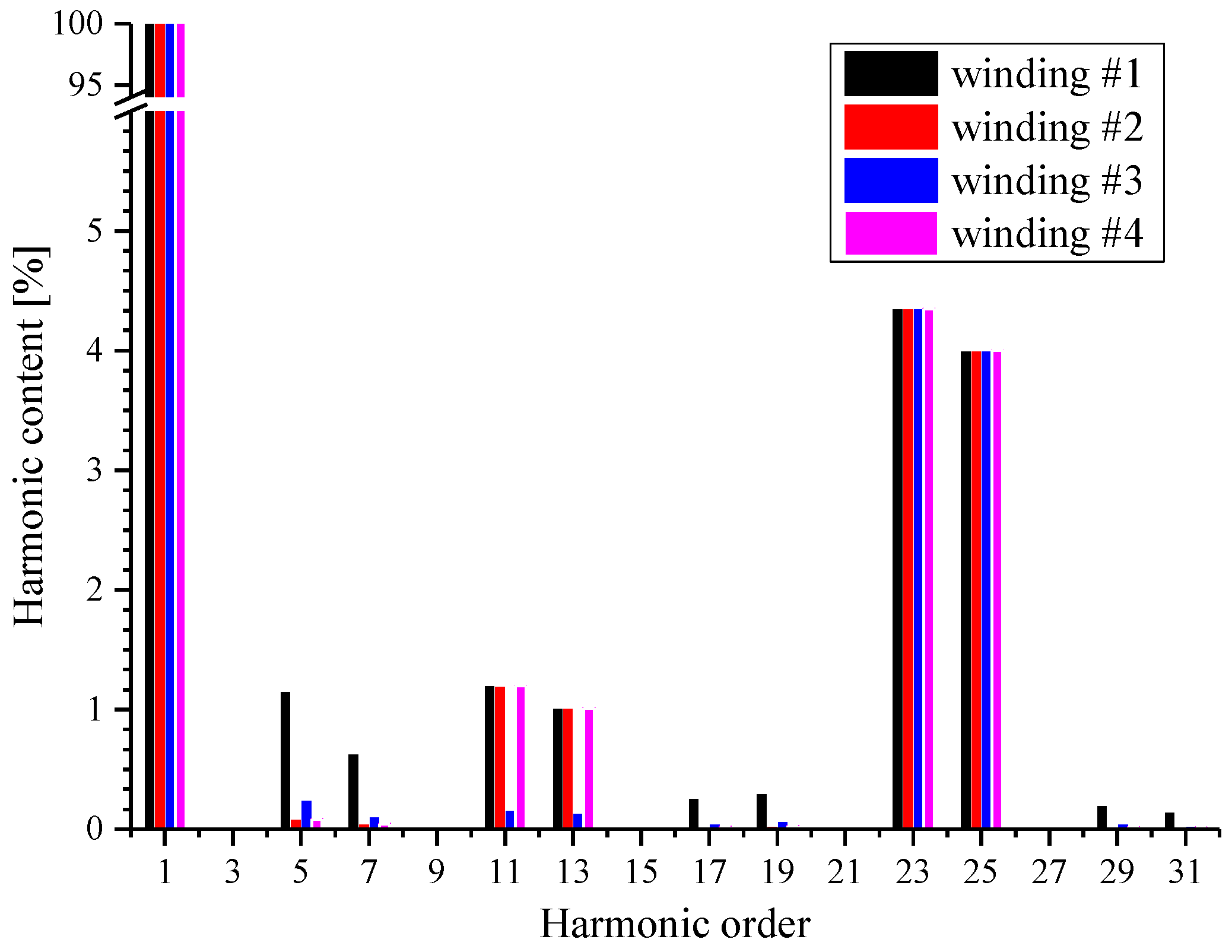
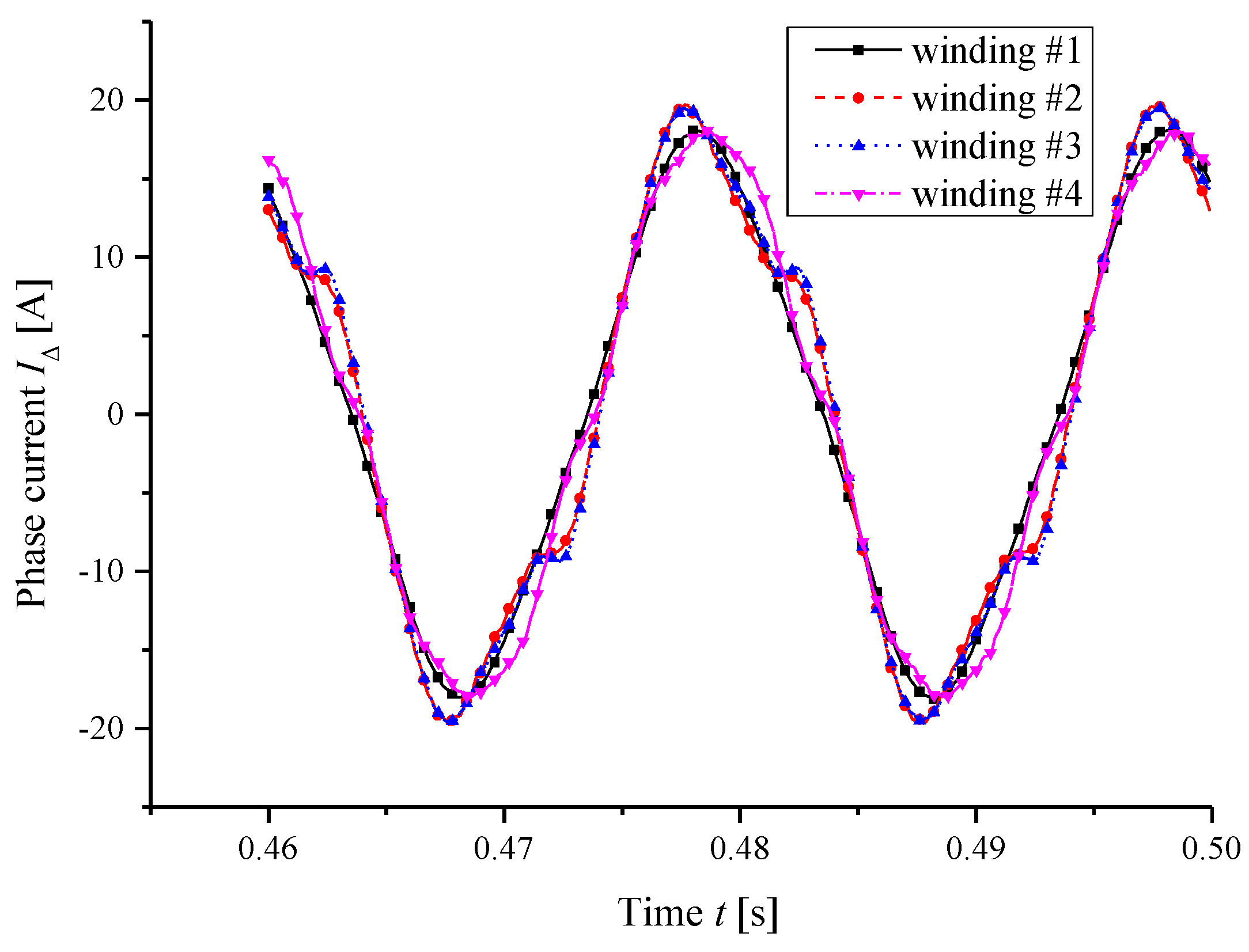
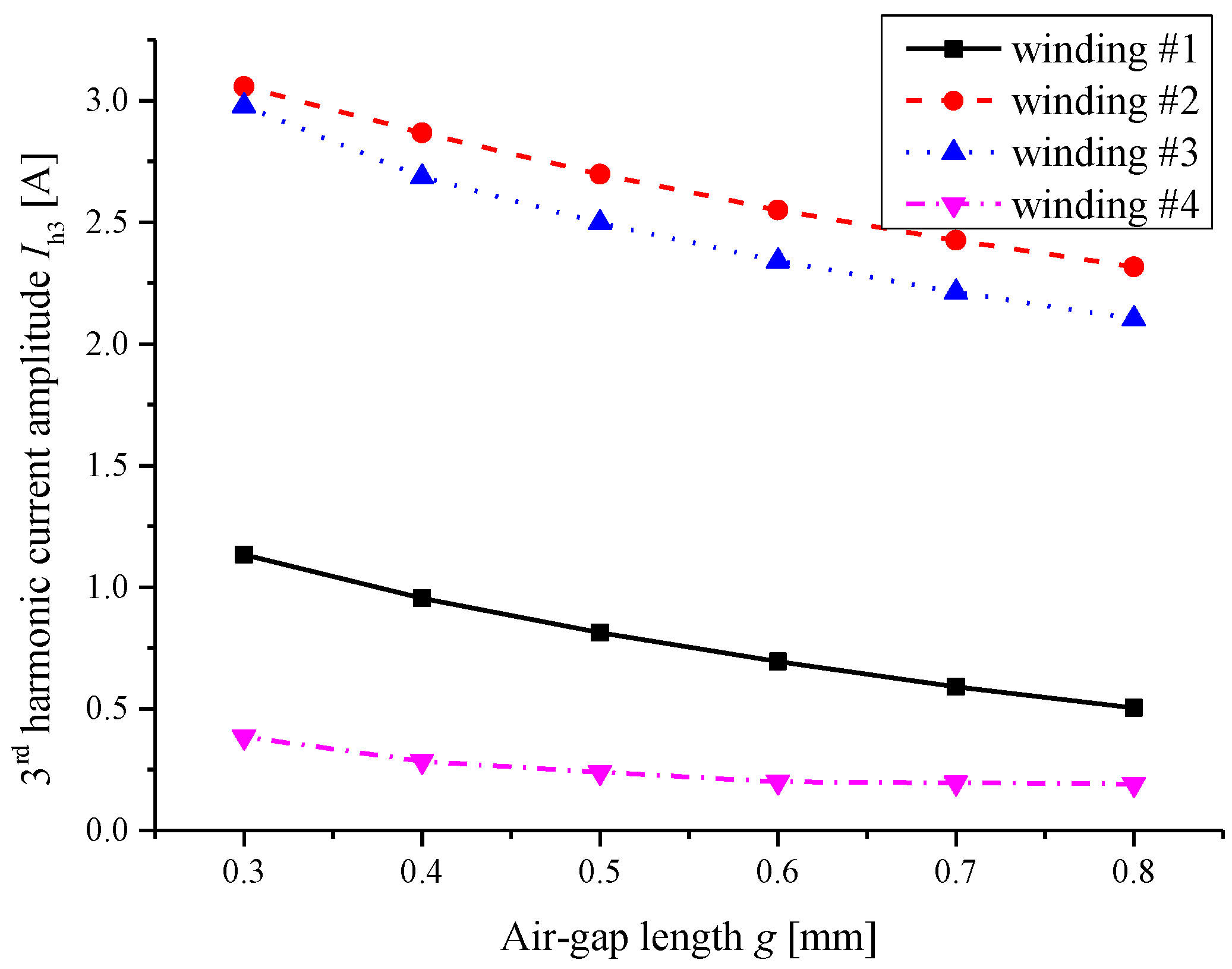
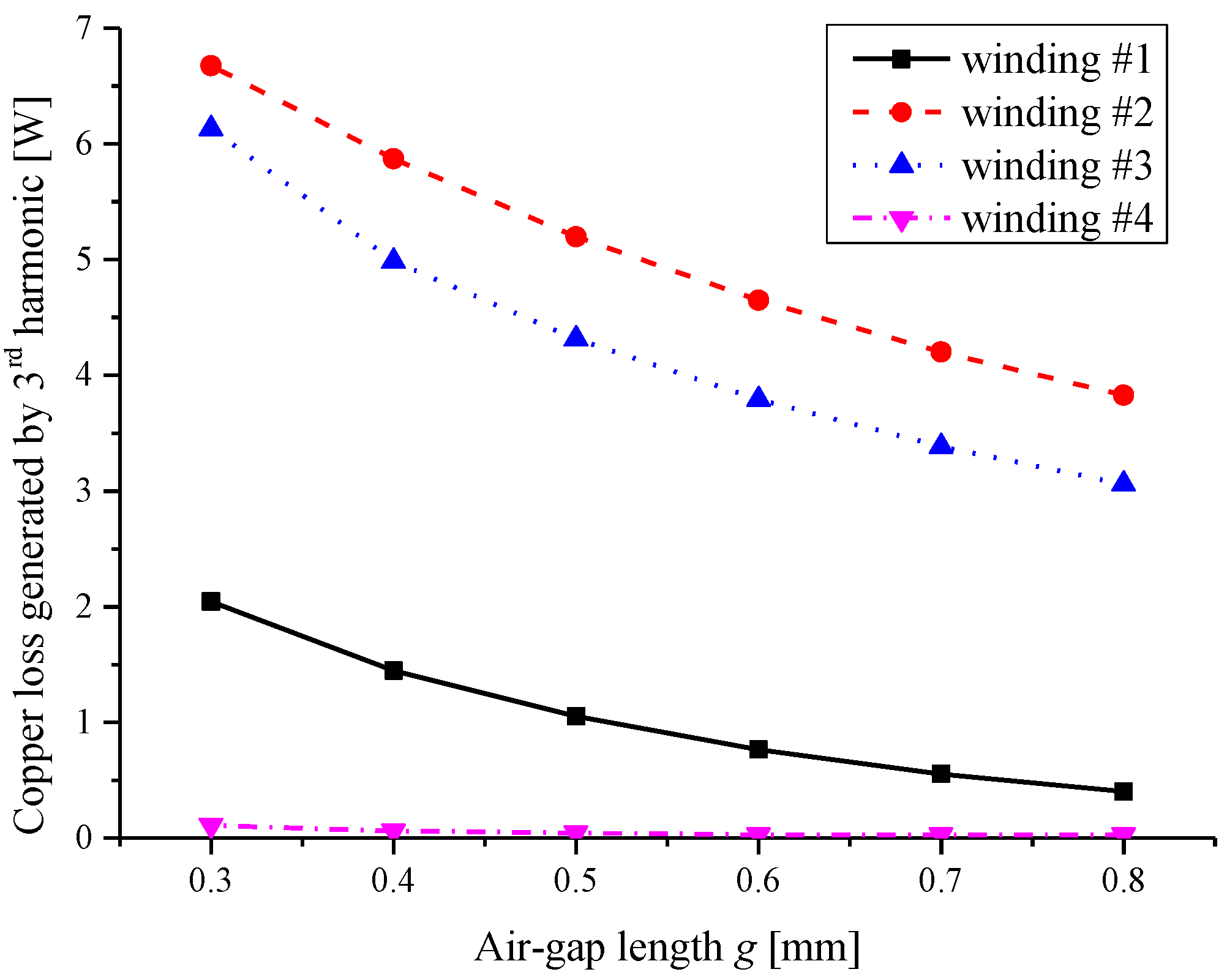
3.1. Harmonic Analysis of Stator Windings
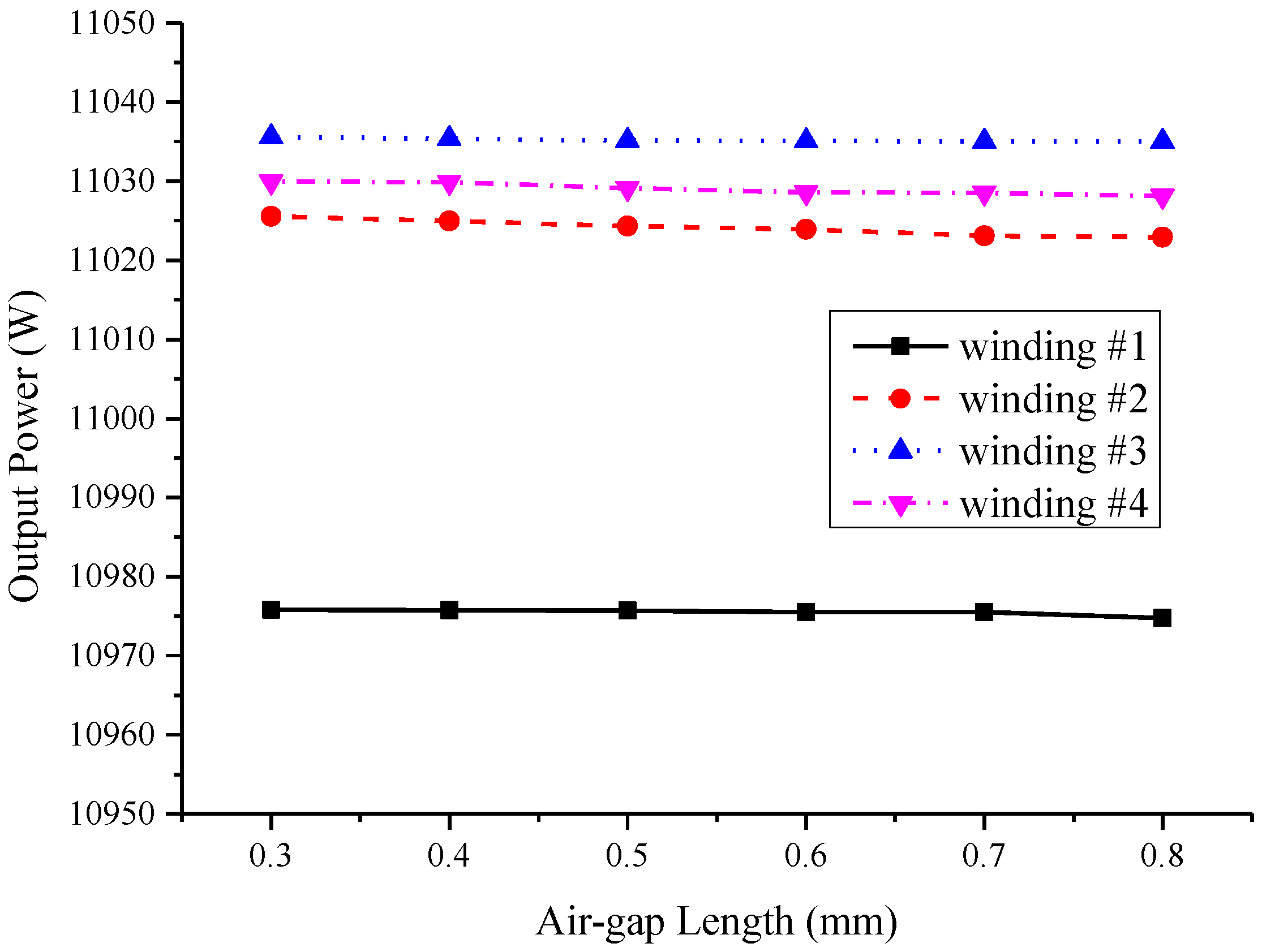
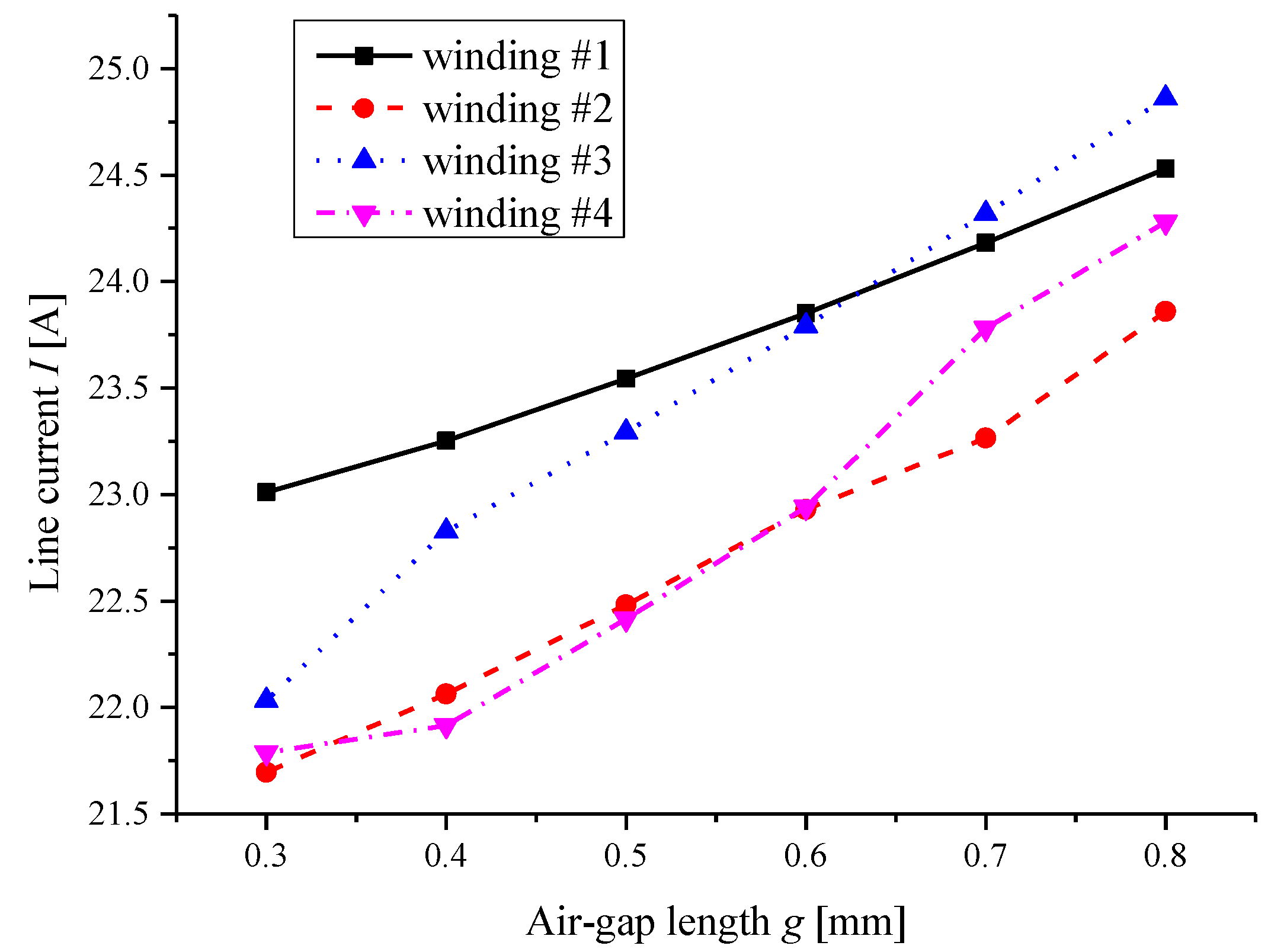
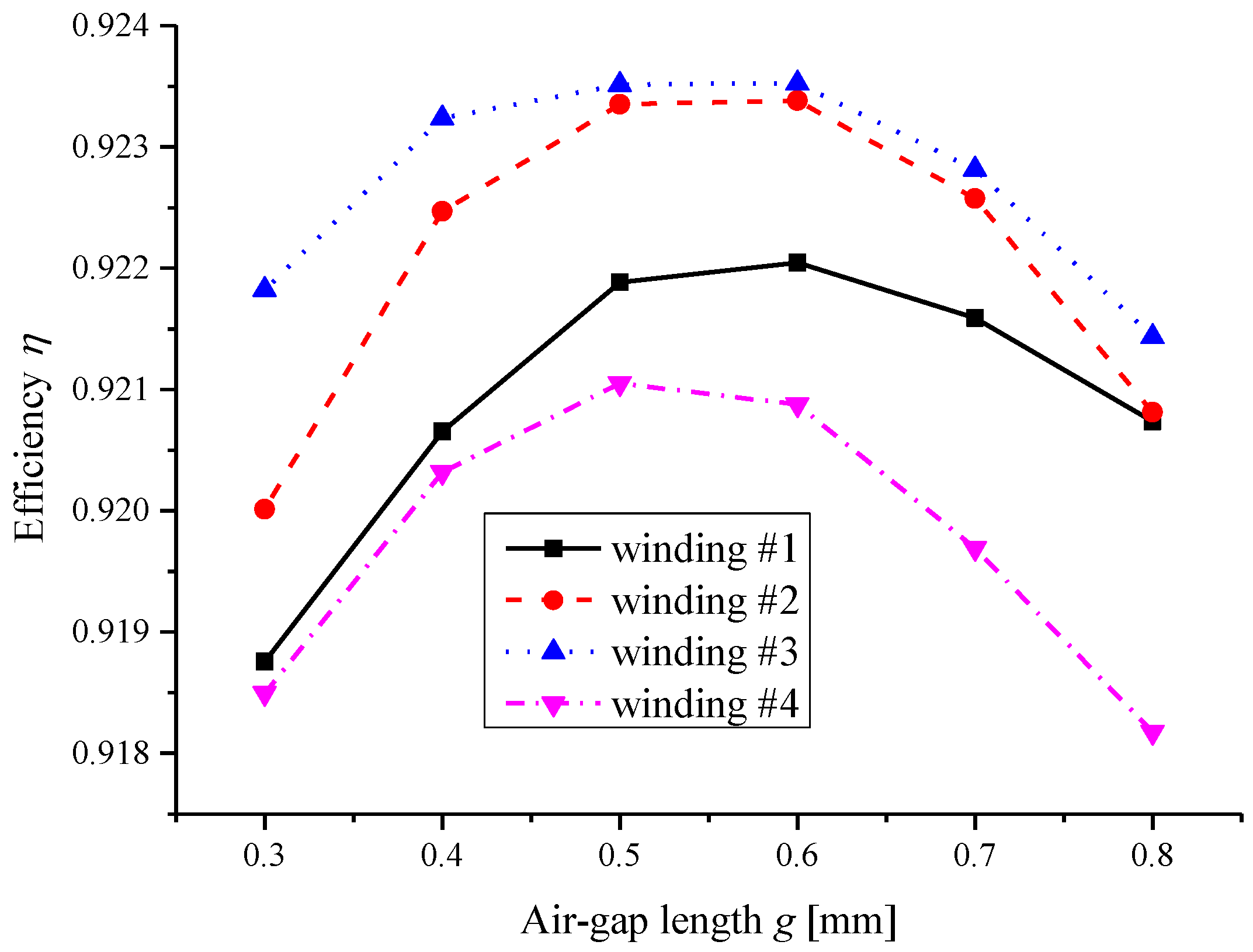
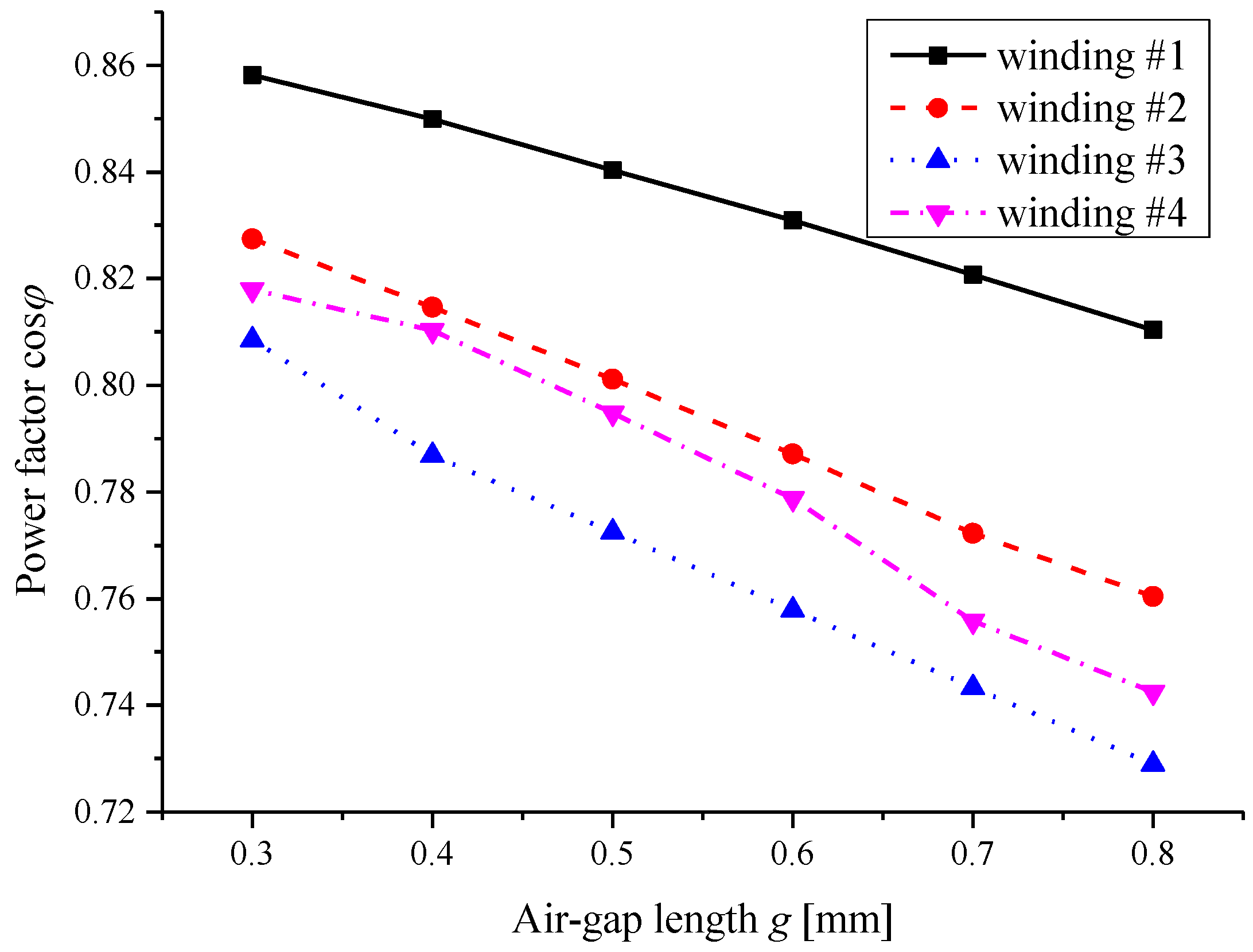
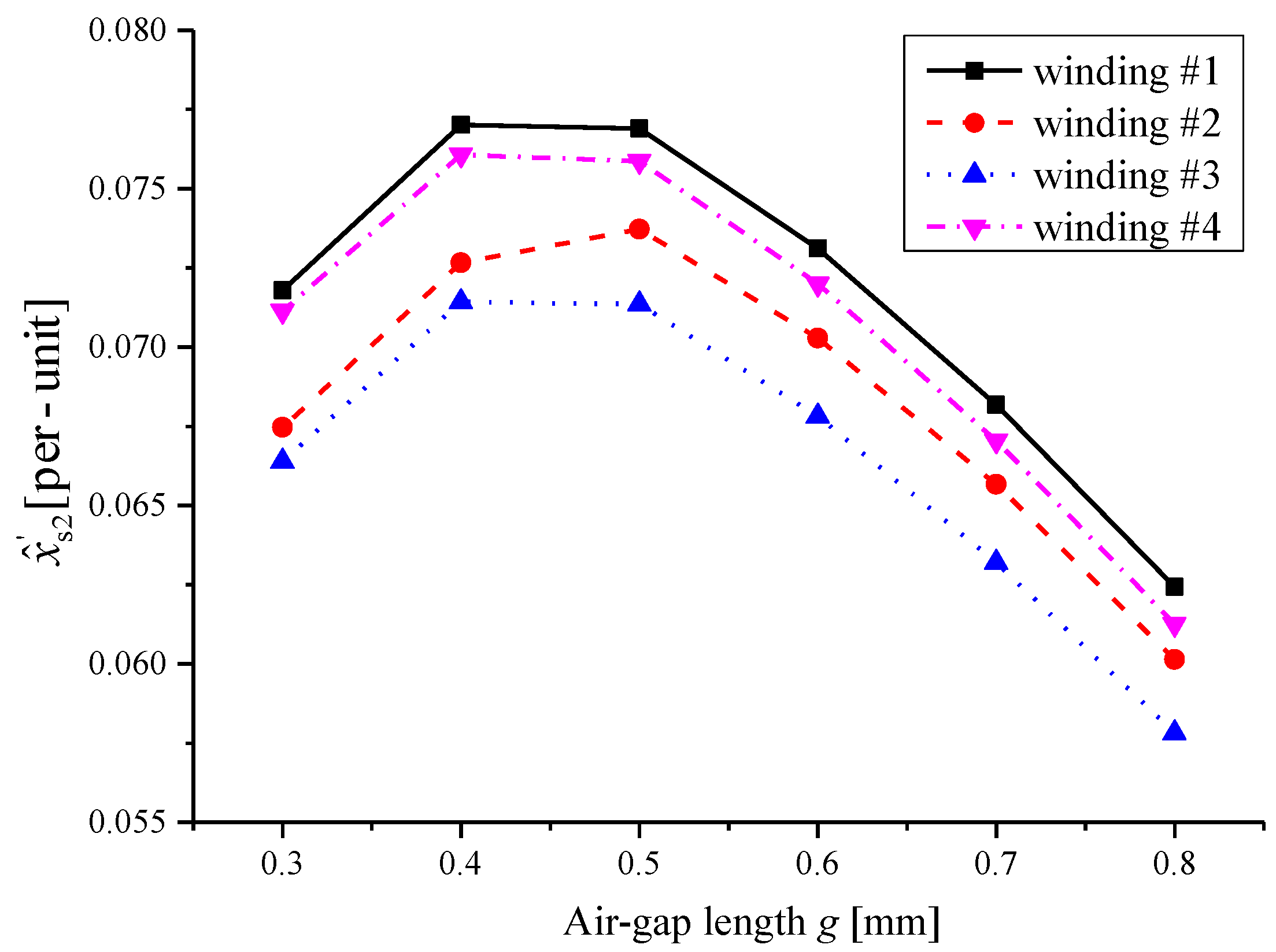
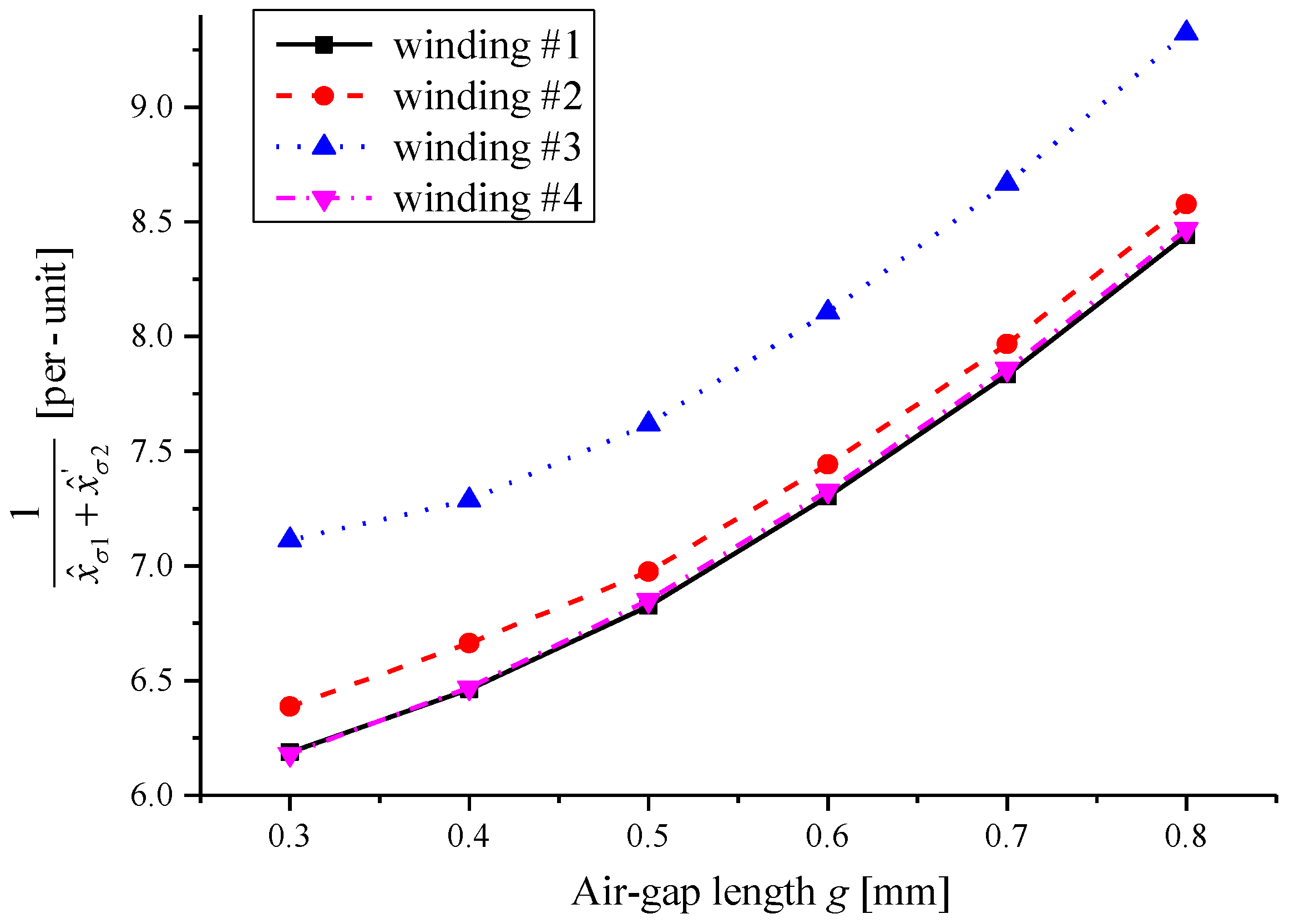
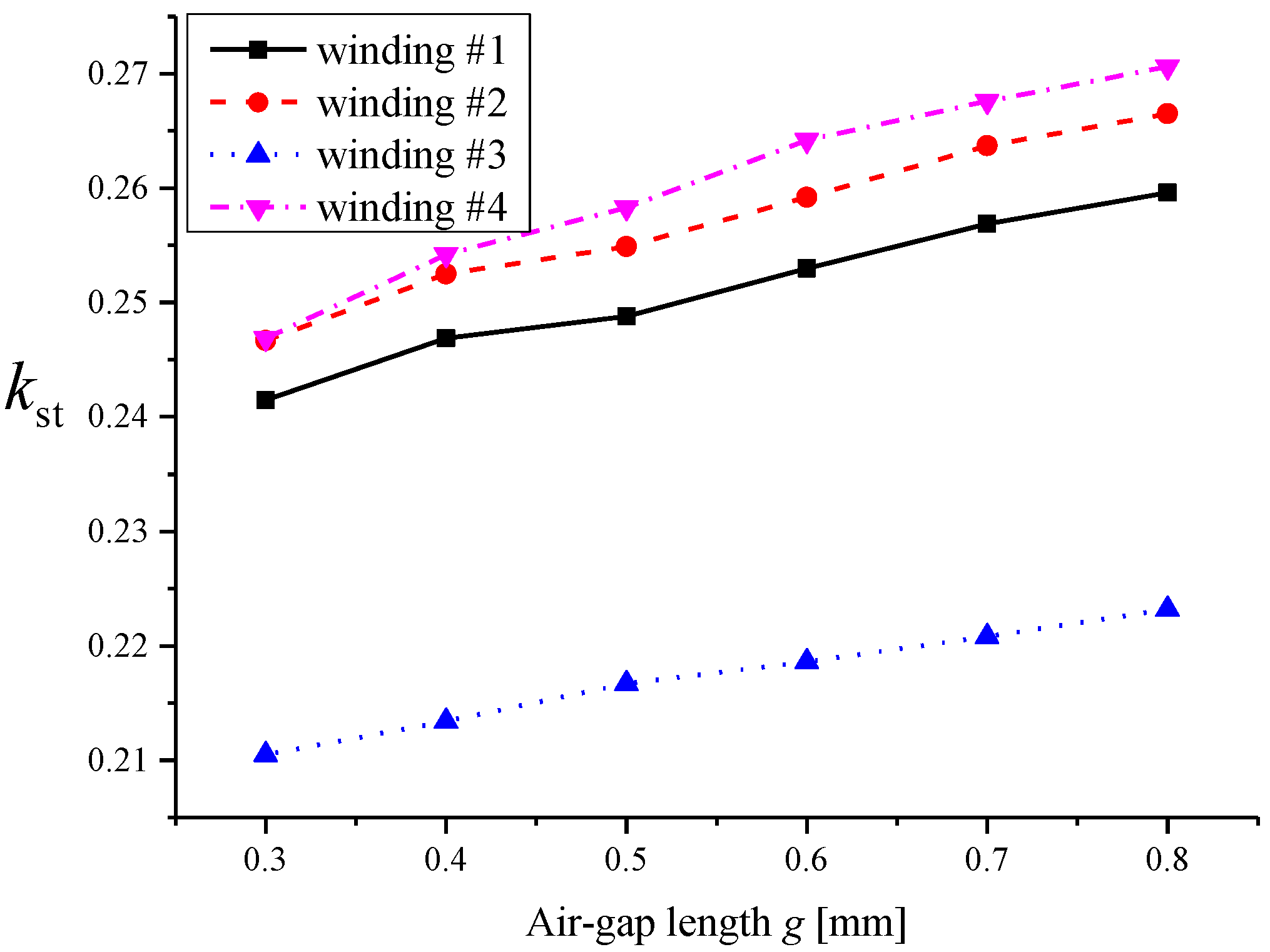
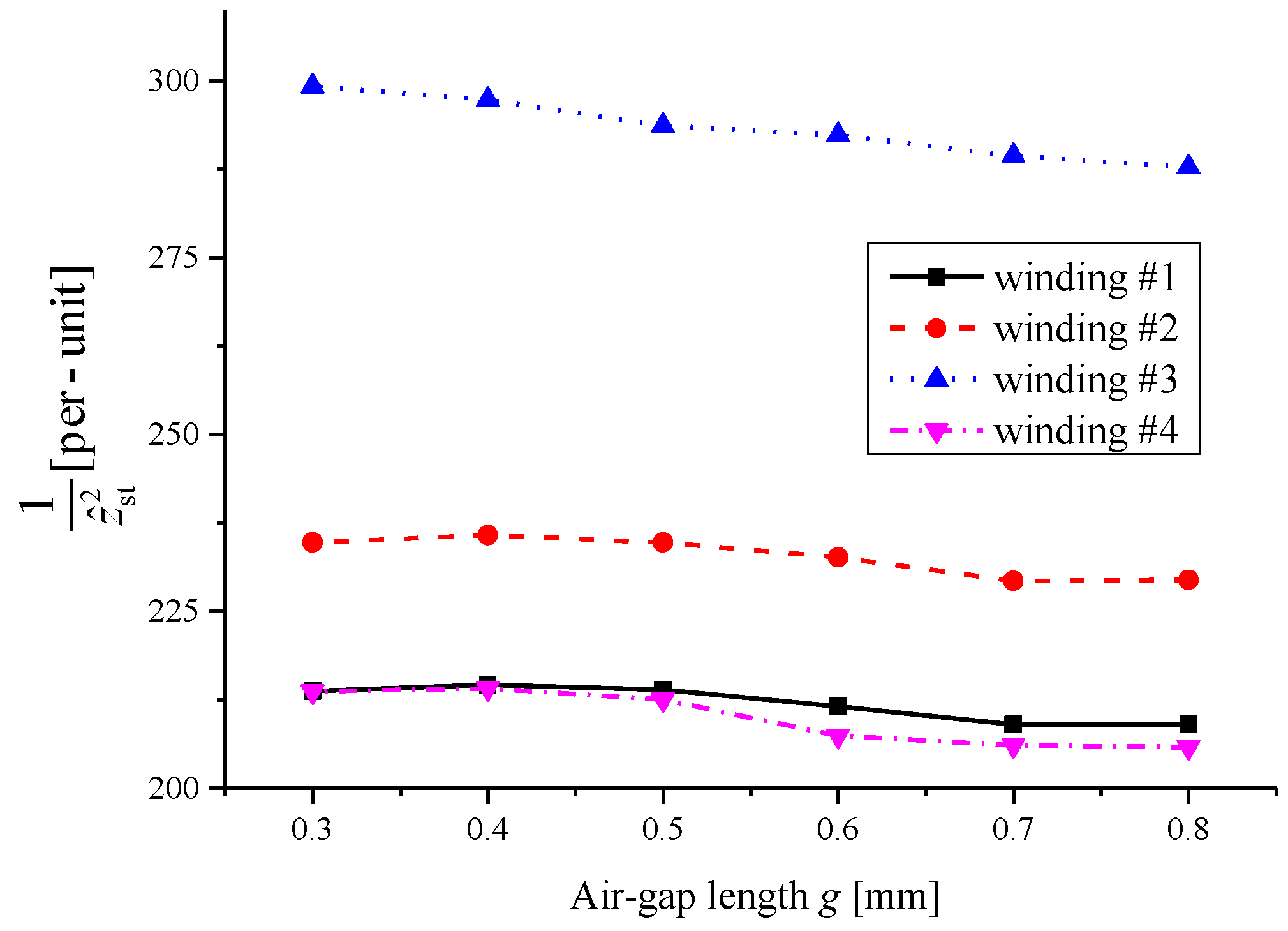
3.2. Air Gap Length
4. Calculation Results and Evaluation
4.1. Full-Load Performance
4.2. Overload Performance
4.3. Starting Performance
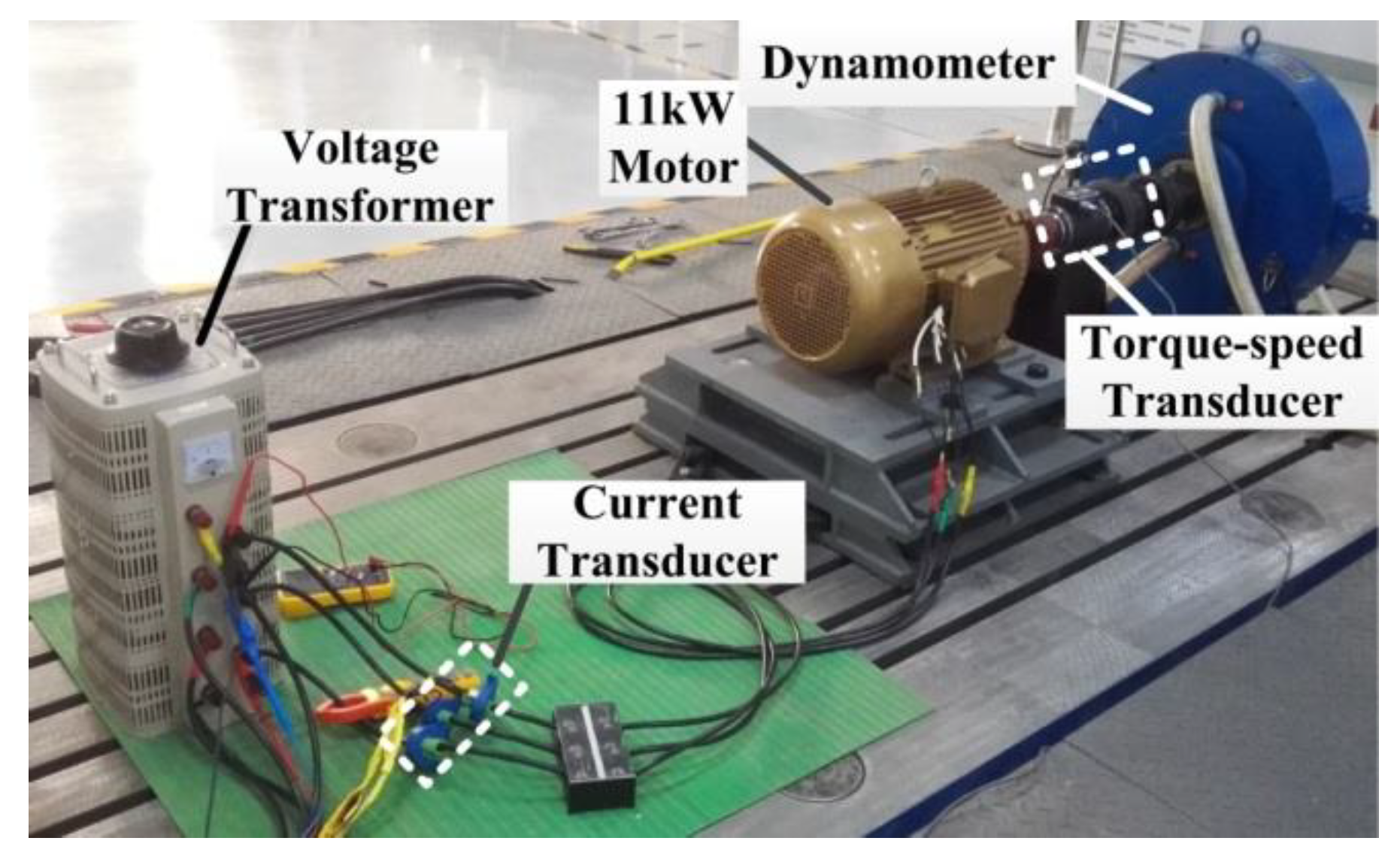
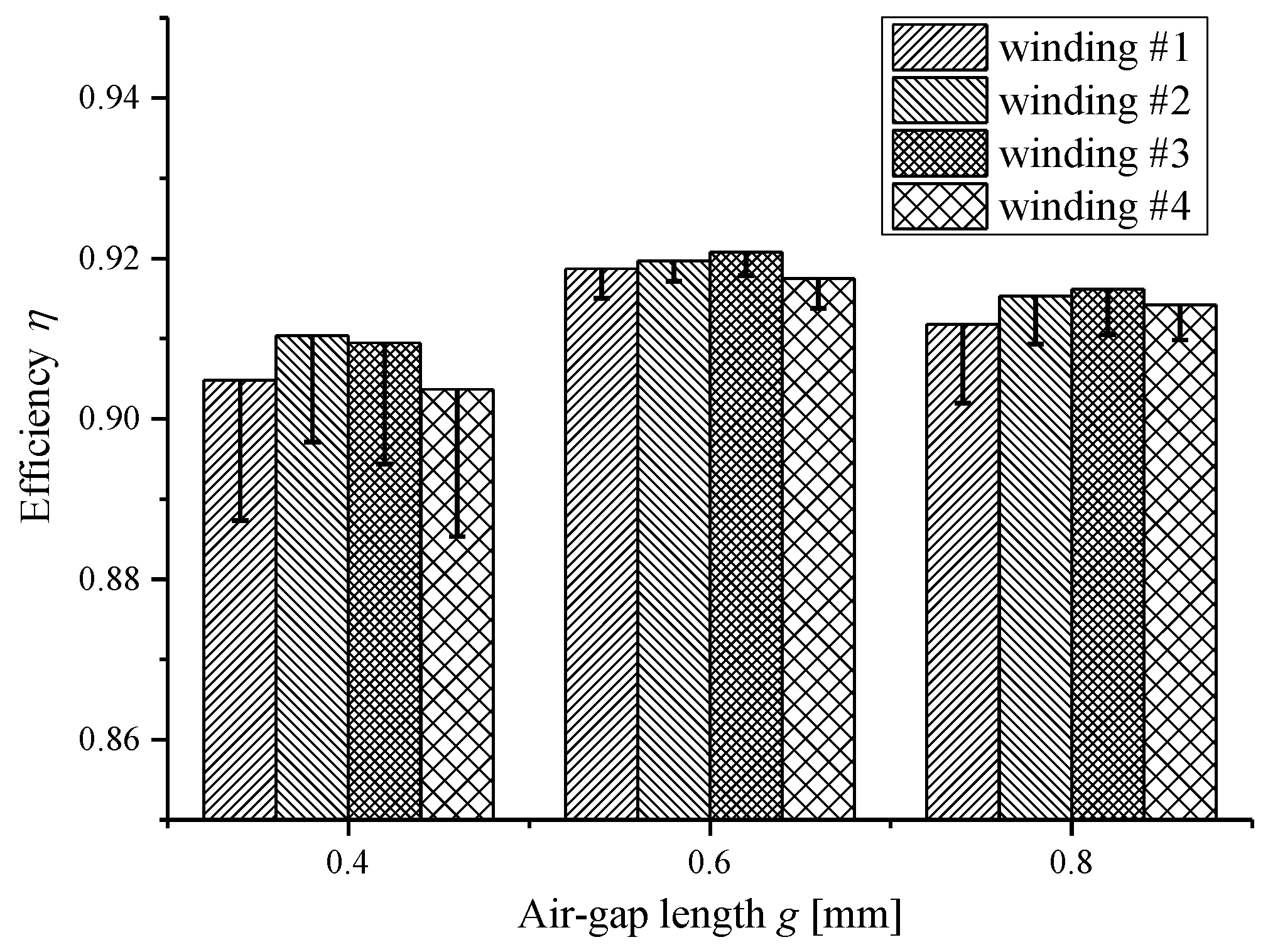
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Al-Badri, M.; Pillay, P.; Angers, P. A novel algorithm for estimating refurbished three-phase induction motors efficiency using only no-load tests. IEEE Trans. Energy Convers. 2015, 30, 615–625. [Google Scholar] [CrossRef]
- Boldea, I.; Nasar, S.A. The Induction Machines Design Handbook; CRC Press: Boca Raton, FL, USA, 2002; pp. 413–431. [Google Scholar]
- Melfi, M.J.; Evon, S.; McElveen, R. Induction versus permanent magnet motors. IEEE Ind. Appl. Mag. 2009, 15, 28–35. [Google Scholar] [CrossRef]
- Gieras, J.F.; Saari, J. Performance Calculation for a High-Speed Solid-Rotor Induction Motor. IEEE Trans. Ind. Electron. 2012, 59, 2689–2700. [Google Scholar] [CrossRef]
- Kirtley, J.; Cowie, J.; Brush, E.; Peters, D.; Kimmich, R. Improving induction motor efficiency with die-cast copper rotor cages. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Agamloh, E.B.; Cavagnino, A. High efficiency design of induction machines for industrial applications. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 33–46. [Google Scholar] [CrossRef]
- Malinowski, J.; McCormick, J.; Dunn, K. Advances in construction techniques of AC induction motors: Preparation for super-premium efficiency levels. IEEE Trans. Ind. Appl. 2004, 40, 1665–1670. [Google Scholar] [CrossRef]
- Parasiliti, F.; Villani, M.; Paris, C.; Walti, O.; Songini, G.; Novello, A.; Rossi, T. Three-phase induction motor efficiency improvements with die-cast copper rotor cage and premium steel. In Proceedings of the SPEEDAM’04 Symposium, Capri, Italy, 16–18 June 2004; pp. 338–343. [Google Scholar]
- Yoon, M.; Jeon, C.; Kauh, S.K. Efficiency increase of an induction motor by improving cooling performance. IEEE Trans. Energy Convers. 2002, 17, 1–6. [Google Scholar] [CrossRef]
- Li, W.; Wang, P.; Li, D.; Zhang, X.; Cao, J.; Li, J. Multiphysical Field Collaborative Optimization of Premium Induction Motor Based on GA. IEEE Trans. Ind. Electron. 2018, 65, 1704–1710. [Google Scholar] [CrossRef]
- Mallik, S.; Mallik, K.; Barman, A.; Maiti, D.; Biswas, S.K.; Deb, N.K.; Basu, S. Efficiency and Cost Optimized Design of an Induction Motor Using Genetic Algorithm. IEEE Trans. Ind. Electron. 2017, 64, 9854–9863. [Google Scholar] [CrossRef]
- Bhuvaneswari, R.; Subramanian, S. Optimization of three-phase induction motor design using simulated annealing algorithm. Electr. Power Compon. Syst. 2005, 33, 947–956. [Google Scholar] [CrossRef]
- Chun, Y.D.; Han, P.W.; Choi, J.H.; Koo, D.H. Multiobjective optimization of three-phase induction motor design based on genetic algorithm. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Çunkaş, M.; Akkaya, R. Design optimization of induction motor by genetic algorithm and comparison with existing motor. Math. Comput. Appl. 2006, 11, 193–203. [Google Scholar] [CrossRef]
- Park, J.T.; Lee, C.G.; Kim, M.K.; Jung, H.K. Application of fuzzy decision to optimization of induction motor design. IEEE Trans. Magn. 1997, 33, 1939–1942. [Google Scholar] [CrossRef]
- Williamson, S.; McClay, C.I. Optimization of the geometry of closed rotor slots for cage induction motors. IEEE Trans Ind. Appl. 1996, 32, 560–568. [Google Scholar] [CrossRef]
- Lie, S.; di Pietro, C. Copper die-cast rotor efficiency improvement and economic consideration. IEEE Trans. Energy Convers. 1995, 10, 419–424. [Google Scholar] [CrossRef]
- Chen, J.; Chen, C. Investigation of a new AC electrical machine winding. IEE Proc. Electr. Power Appl. 1998, 145, 125–132. [Google Scholar] [CrossRef]
- Lei, Y.; Zhao, Z.; Wang, S.; Dorrell, D.G.; Xu, W. Design and analysis of star–delta hybrid windings for high-voltage induction motors. IEEE Trans. Ind. Electron. 2010, 58, 3758–3767. [Google Scholar] [CrossRef]
- Raziee, S.M.; Misir, O.; Ponick, B. Combined Star-Delta Winding Analysis. IEEE Trans. Energy Convers. 2018, 33, 383–394. [Google Scholar] [CrossRef]
- Shikun, C. Motor Design, 2nd ed.; Machine Press: Beijing, China, 1990. [Google Scholar]
- Aguiar, V.P.B.; Pontes, R.S.T.; Ferreira, F.J.T.E. Technical and Economic Evaluation of Efficiency Improvement after Rewinding in Low-Power Induction Motors: A Brazilian Case. Energies 2018, 11, 1701. [Google Scholar] [CrossRef]
- Ho, S.L.; Fu, W.N.; Wong, H.C. Estimation of stray losses of skewed rotor induction motors using coupled 2-D and 3-D time stepping finite element methods. IEEE Trans. Magn. 1998, 34, 3102–3105. [Google Scholar] [CrossRef]
- Hernandez-Aramburo, C.A.; Green, T.C.; Smith, A.C. Estimating rotational iron losses in an induction machine. IEEE Trans. Magn. 2003, 39, 3527–3533. [Google Scholar] [CrossRef]
- Komeza, K.; Dems, M. Finite-Element and Analytical Calculations of No-Load Core Losses in Energy-Saving Induction Motors. IEEE Trans. Ind. Electron. 2012, 59, 2934–2946. [Google Scholar] [CrossRef]
- Yamazaki, K.; Suzuki, A.; Ohto, M.; Takakura, T.; Nakagawa, S. Equivalent Circuit Modeling of Induction Motors Considering Stray Load Loss and Harmonic Torques Using Finite Element Method. IEEE Trans. Magn. 2011, 47, 986–989. [Google Scholar] [CrossRef]
- Boglietti, A.; Cavagnino, A.; Ferraris, L.; Lazzari, M. Induction Motor Equivalent Circuit Including the Stray Load Losses in the Machine Power Balance. IEEE Trans. Energy Convers. 2008, 23, 796–803. [Google Scholar] [CrossRef]
- Al-Jufout, S.; Al-Rousan, W.; Wang, C. Optimization of Induction Motor Equivalent Circuit Parameter Estimation Based on Manufacturer’s Data. Energies 2018, 11, 1792. [Google Scholar] [CrossRef]
- Maxwell ANSYS. Maxwell 2d Technical Notes. In Maxwell Online Help; ANSYS, Inc.: Canonsburg, PA, USA, 2017. [Google Scholar]
- Wucherer, A.; Touré, H. Standard Test Procedure for Polyphase Induction Motors and Generators; Institute of Electrical and Electronics Engineers: New York, NY, USA, 2004. [Google Scholar]
- Hsu, J.S.; Kueck, J.D.; Olszewski, M.; Casada, D.A.; Otaduy, P.J.; Tolbert, L.M. Comparison of induction motor field efficiency evaluation methods. In Proceedings of the IAS’96 Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; pp. 703–712. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of phases, m | 3 |
| Electrical output power, Pout (kW) | 11 |
| Rated line voltage, UN (V) | 380 |
| Frequency, f (Hz) | 50 |
| Synchronous speed, n (rpm) | 1500 |
| Number of pole pairs, p | 2 |
| Number of stator slots, Ns | 48 |
| Stator outer diameter, D1out (mm) | 260 |
| Stator inner diameter, D1in (mm) | 180 |
| Axial length, L (mm) | 170 |
| Service | S1 |
| Parameter | 5/6 | Single-Layer Y-Δ | 11/12 | 2/3 |
|---|---|---|---|---|
| S.D.L. Δ | Y-Δ | Y-Δ | ||
| No. | #1 | #2 | #3 | #4 |
| y/τ | 5/6 | 1 | 11/12 | 2/3 |
| p | 2 | 2 | 2 | 2 |
| q | qsd = 4 | qY1 = qΔ1 = 2 | qY2 = qΔ2 = 2 | qY3 = qΔ3 = 2 |
| α | 15° | 15° | 15° | 15° |
| N | Nsd = 176 | NY1 = 48 | NY2 = 48 | NY3 = 56 |
| NΔ1 = 84 | NΔ2 = 80 | NΔ3 = 96 | ||
| nstr | nstr-sd = 5 | nstr-Y1 = 10 | nstr-Y2 = 10 | nstr-Y3 = 5 |
| nstr-Δ1 = 6 | nstr-Δ2 = 6 | nstr-Δ3 = 5 | ||
| dw (mm) | dw-sd = 0.8 | dw-Y1 = 0.77 | dw-Y2 = 0.77 | dw-Y3 = 1.12 |
| dw-Δ1 = 0.77 | dw-Δ2 = 0.77 | dw-Δ3 = 0.77 | ||
| R1sm(at 77 °C, Ω) | R1Δ = 1.059 | R2Δ = 0.476 | R3Δ = 0.461 | R4Δ = 0.498 |
| R2Y = 0.164 | R3Y = 0.166 | R4Y = 0.173 |
| Winding No. | #1 | #2 | #3 | #4 | |
|---|---|---|---|---|---|
| Parameter (p.u.) | |||||
| 0.0103 | 0.0100 | 0.0098 | 0.0099 | ||
| 0.0082 | 0.0087 | 0.0078 | 0.0087 | ||
| 0.0046 | 0.0044 | 0.0041 | 0.0044 | ||
| No. | Name | Model | Error | Quantity |
|---|---|---|---|---|
| 1 | Eddy-Current Dynamometer | DW160 | --- | 1 |
| 2 | Three-Phase Transformer | TSGC2 | --- | 1 |
| 3 | Digital Torque-Speed Transducer | 500A | ±0.2% | 1 |
| 4 | Power Analyzer | NORMA 5000/PP64 | ±0.03% | 1 |
| 5 | Current Transducer | LT 58-S7 | ±0.5% | 3 |
| 6 | Two-Arm Bridge | QJ57P-1 | ±0.05% | 1 |
| Winding No. | #1 | #2 | #3 | #4 | |
|---|---|---|---|---|---|
| Parameter | |||||
| R1sm (@ 3 °C, Ω) | R1Δ = 0.853 | R2Δ = 0.402 | R3Δ = 0.366 | R4Δ = 0.474 | |
| R2Y = 0.138 | R3Y = 0.132 | R4Y = 0.131 | |||
| R1sm (after full-load, Ω) | R1Δ = 0.963 | R2Δ = 0.428 | R3Δ = 0.409 | R4Δ = 0.527 | |
| R2Y = 0.147 | R3Y = 0.147 | R4Y = 0.146 | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ai, C.; Lee, C.H.T.; Kirtley, J.L.; Huang, Y.; Wang, H.; Zhang, Z. A Hybrid Methodology for Analyzing the Performance of Induction Motors with Efficiency Improvement by Specific Commercial Measures. Energies 2019, 12, 4497. https://doi.org/10.3390/en12234497
Ai C, Lee CHT, Kirtley JL, Huang Y, Wang H, Zhang Z. A Hybrid Methodology for Analyzing the Performance of Induction Motors with Efficiency Improvement by Specific Commercial Measures. Energies. 2019; 12(23):4497. https://doi.org/10.3390/en12234497
Chicago/Turabian StyleAi, Chengliu, Christopher H.T. Lee, James L. Kirtley, Yuanfeng Huang, Haifeng Wang, and Zhiwei Zhang. 2019. "A Hybrid Methodology for Analyzing the Performance of Induction Motors with Efficiency Improvement by Specific Commercial Measures" Energies 12, no. 23: 4497. https://doi.org/10.3390/en12234497
APA StyleAi, C., Lee, C. H. T., Kirtley, J. L., Huang, Y., Wang, H., & Zhang, Z. (2019). A Hybrid Methodology for Analyzing the Performance of Induction Motors with Efficiency Improvement by Specific Commercial Measures. Energies, 12(23), 4497. https://doi.org/10.3390/en12234497