Figure 1.
Components of WCS.
Figure 1.
Components of WCS.
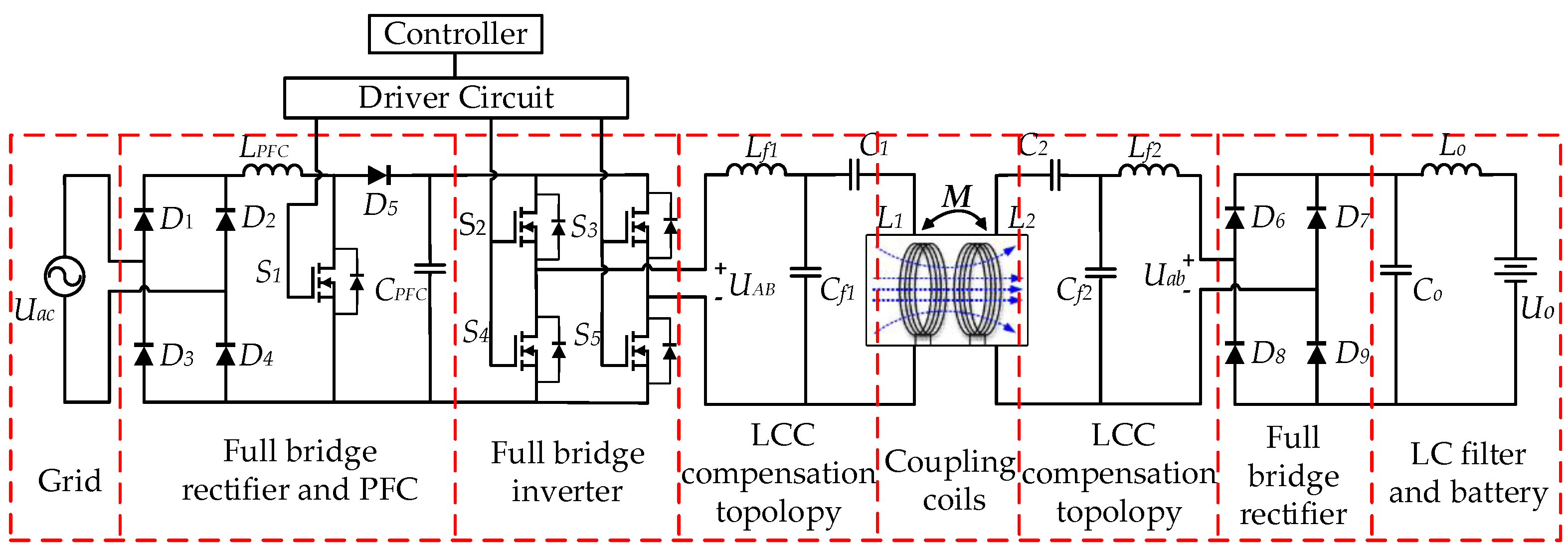
Figure 2.
Circuit structure of WCS.
Figure 2.
Circuit structure of WCS.
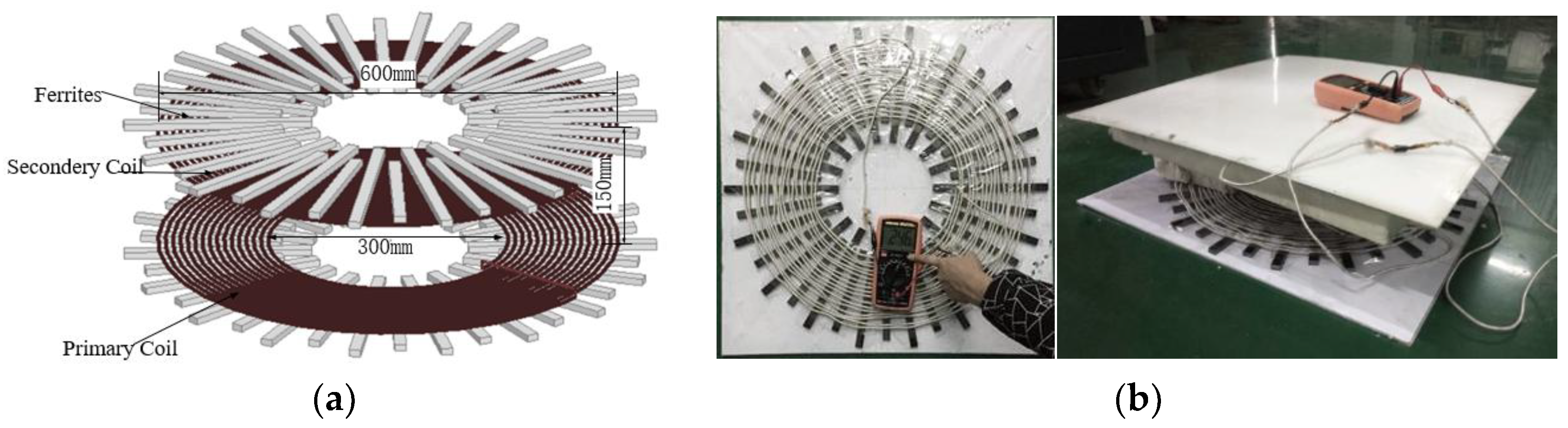
Figure 3.
The coupling coils: (a) 3D model of coupling coils; (b) parameter measurement of coils.
Figure 3.
The coupling coils: (a) 3D model of coupling coils; (b) parameter measurement of coils.
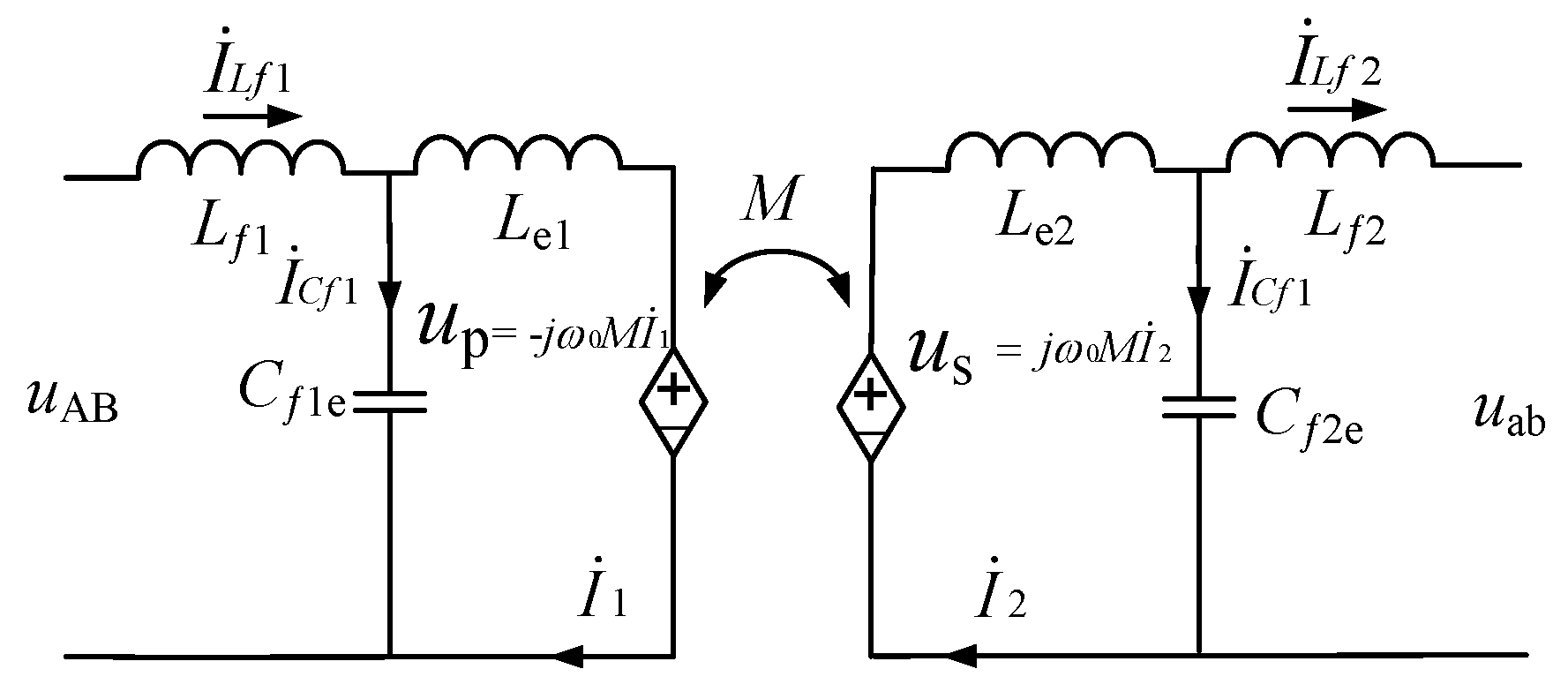
Figure 4.
Equivalent circuit of LCC compensation topology network.
Figure 4.
Equivalent circuit of LCC compensation topology network.
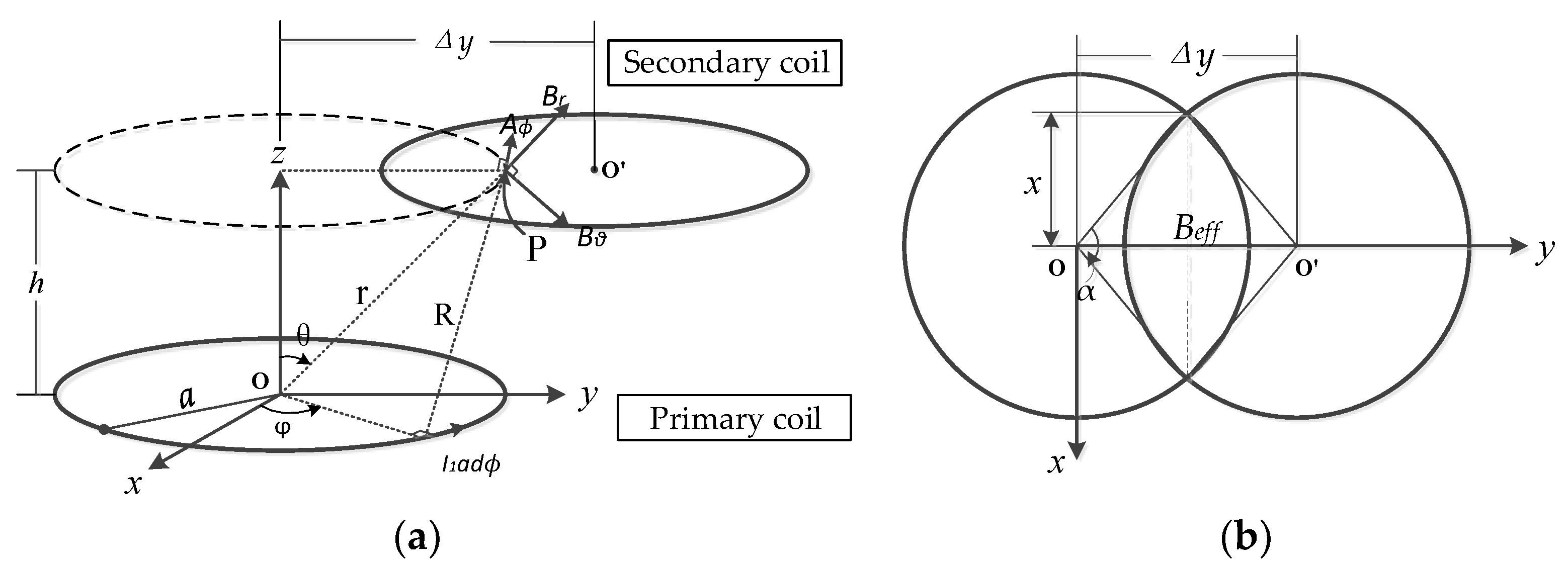
Figure 5.
Offset diagram: (a) coordinate view; (b) top view.
Figure 5.
Offset diagram: (a) coordinate view; (b) top view.
Figure 6.
Relative position of coils: (a) alignment; (b) 10% offset—60 mm; (c) 20% offset—120 mm; (d) 30% offset—180 mm; (e) 40% offset—240 mm; (f) 10% offset—300 mm.
Figure 6.
Relative position of coils: (a) alignment; (b) 10% offset—60 mm; (c) 20% offset—120 mm; (d) 30% offset—180 mm; (e) 40% offset—240 mm; (f) 10% offset—300 mm.
Figure 7.
Comparison of simulation and measurement: (a) mutual inductance; (b) coupling coefficients.
Figure 7.
Comparison of simulation and measurement: (a) mutual inductance; (b) coupling coefficients.
Figure 8.
Circuit of the WCS.
Figure 8.
Circuit of the WCS.
Figure 9.
Charging parameters: (a) Current; (b) Voltage.
Figure 9.
Charging parameters: (a) Current; (b) Voltage.
Figure 10.
3D model of the vehicle body: (a) Side view; (b) Top view.
Figure 10.
3D model of the vehicle body: (a) Side view; (b) Top view.
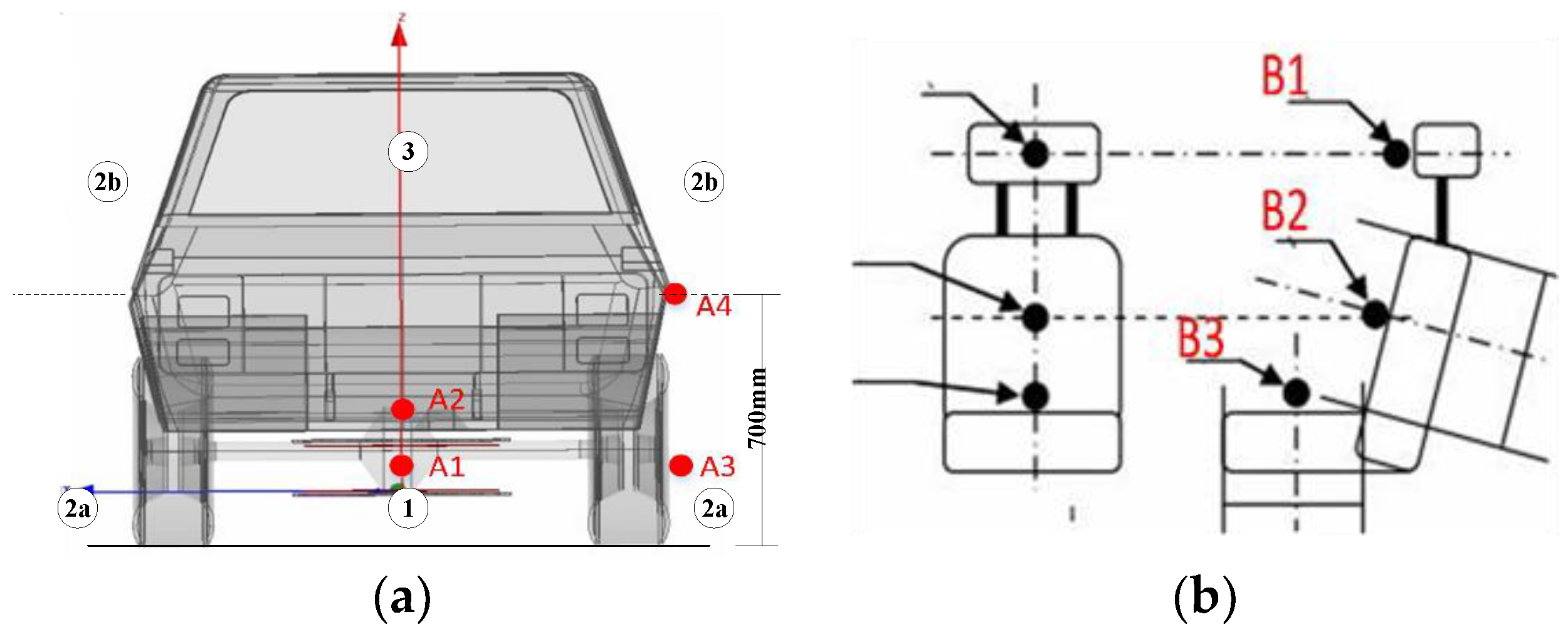
Figure 11.
Position of test points; (a) position of A1, A2, A3, A4; (b) position of B1, B2, B3.
Figure 11.
Position of test points; (a) position of A1, A2, A3, A4; (b) position of B1, B2, B3.
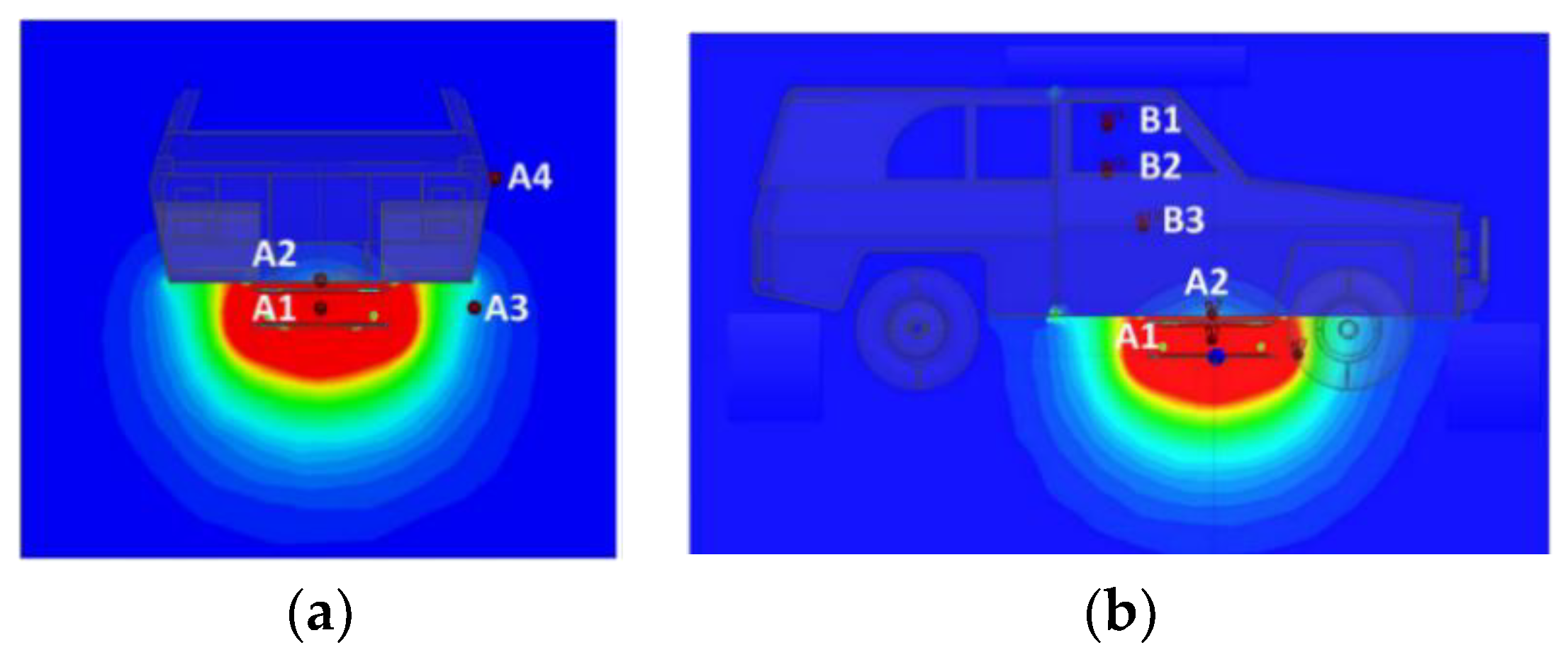
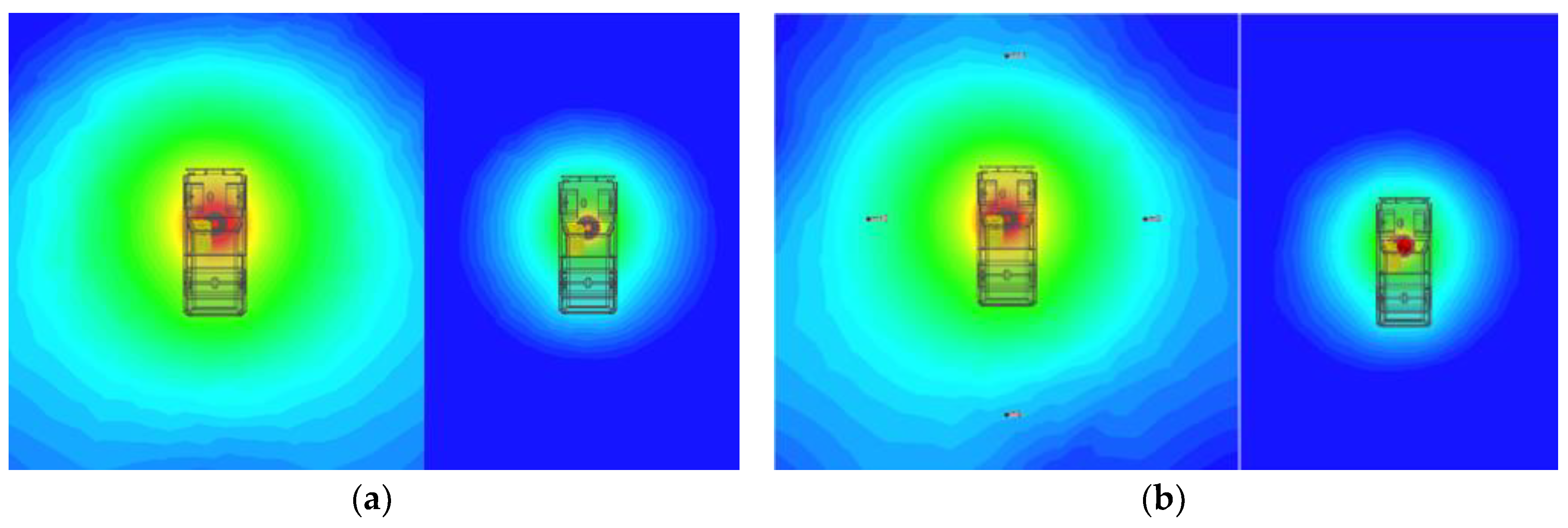
Figure 12.
Magnetic field of aligned coils: (a) front view; (b) right view.
Figure 12.
Magnetic field of aligned coils: (a) front view; (b) right view.
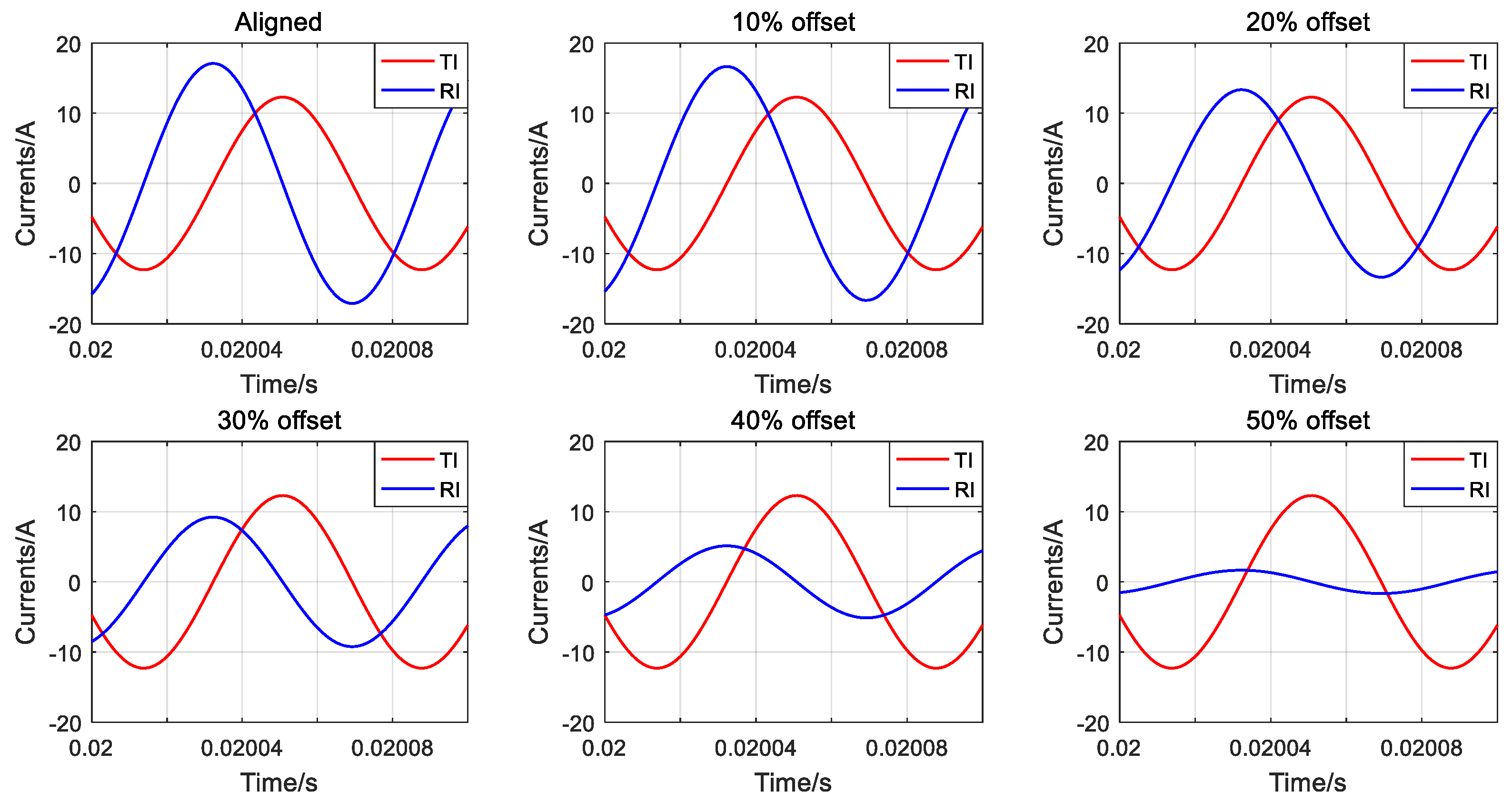
Figure 13.
Currents of primary and secondary coils.
Figure 13.
Currents of primary and secondary coils.
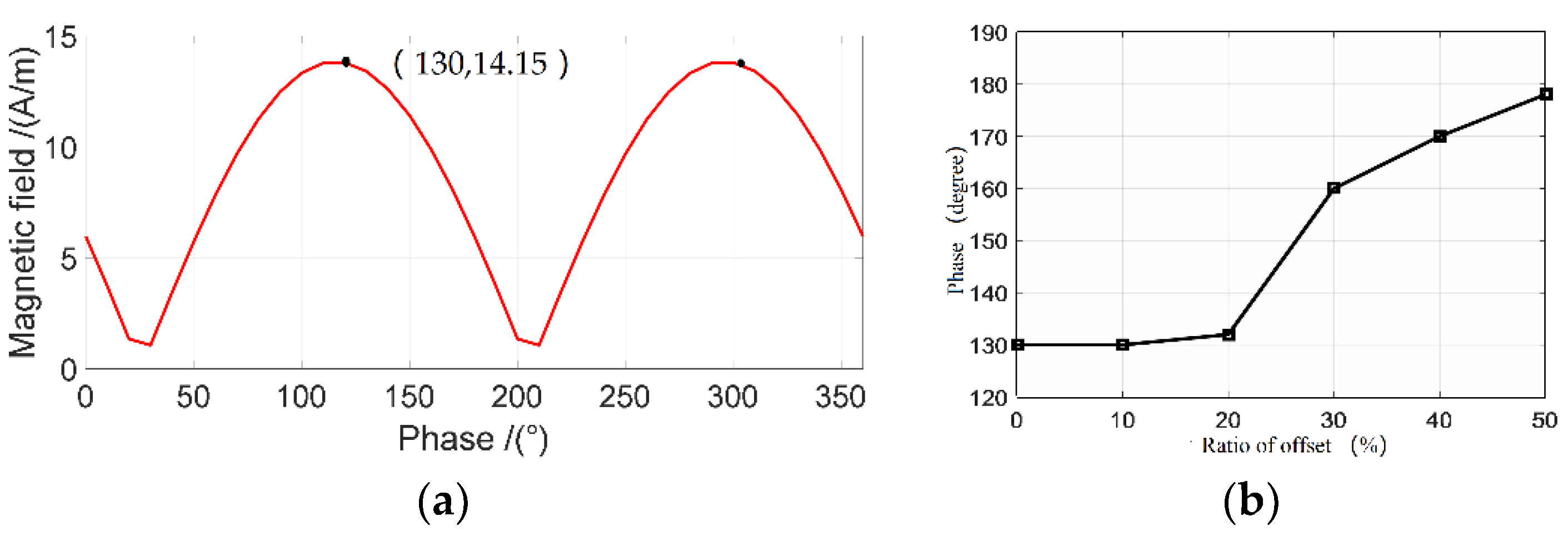
Figure 14.
Phase of the primary current: (a) phase of the primary current at test point A3; (b) relationship between the offset and the phase of the maximum magnetic field.
Figure 14.
Phase of the primary current: (a) phase of the primary current at test point A3; (b) relationship between the offset and the phase of the maximum magnetic field.
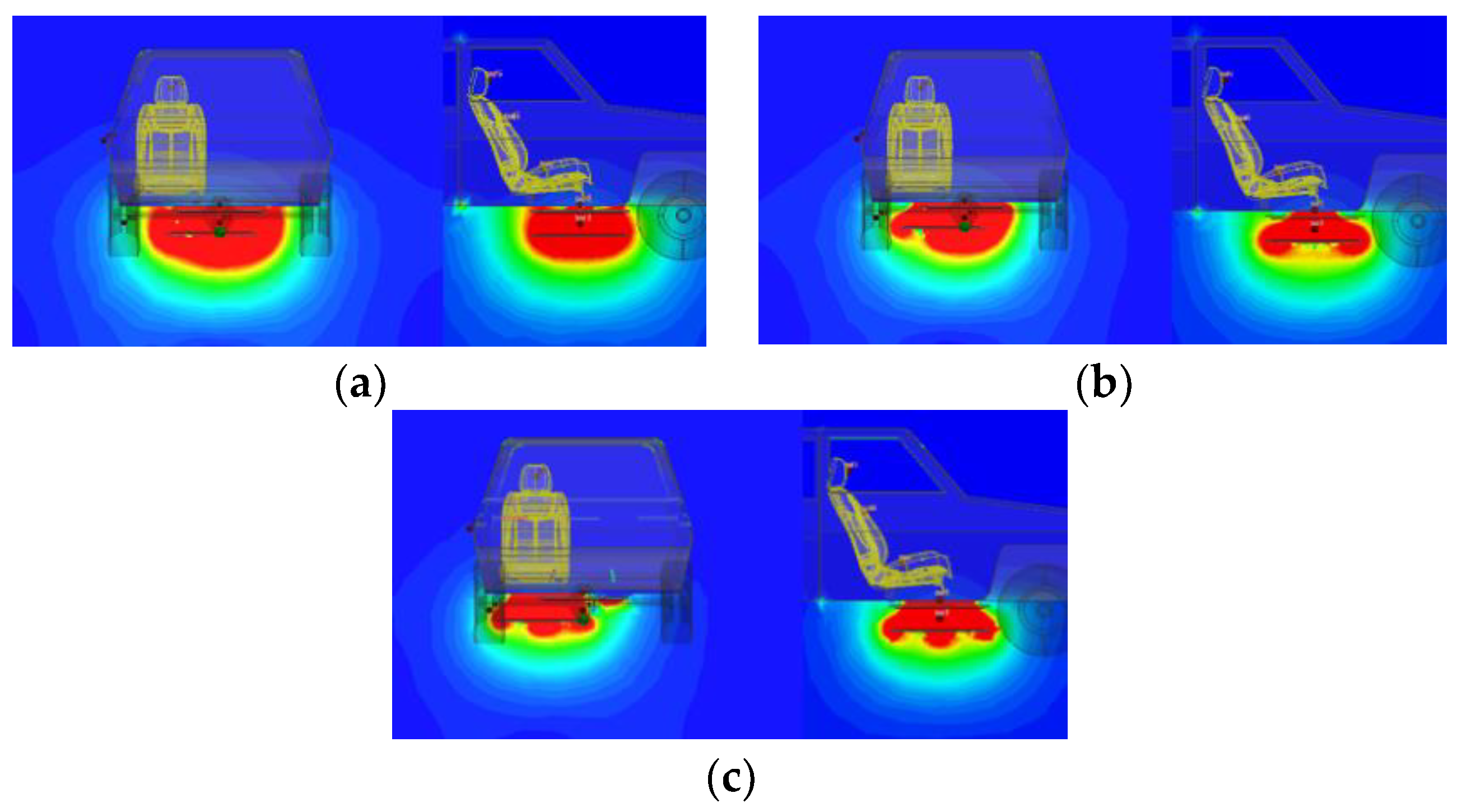
Figure 15.
Magnetic field distribution: (a) 10% offset—60 mm; (b) 30% offset—180 mm; (c) 50% offset—300 mm.
Figure 15.
Magnetic field distribution: (a) 10% offset—60 mm; (b) 30% offset—180 mm; (c) 50% offset—300 mm.
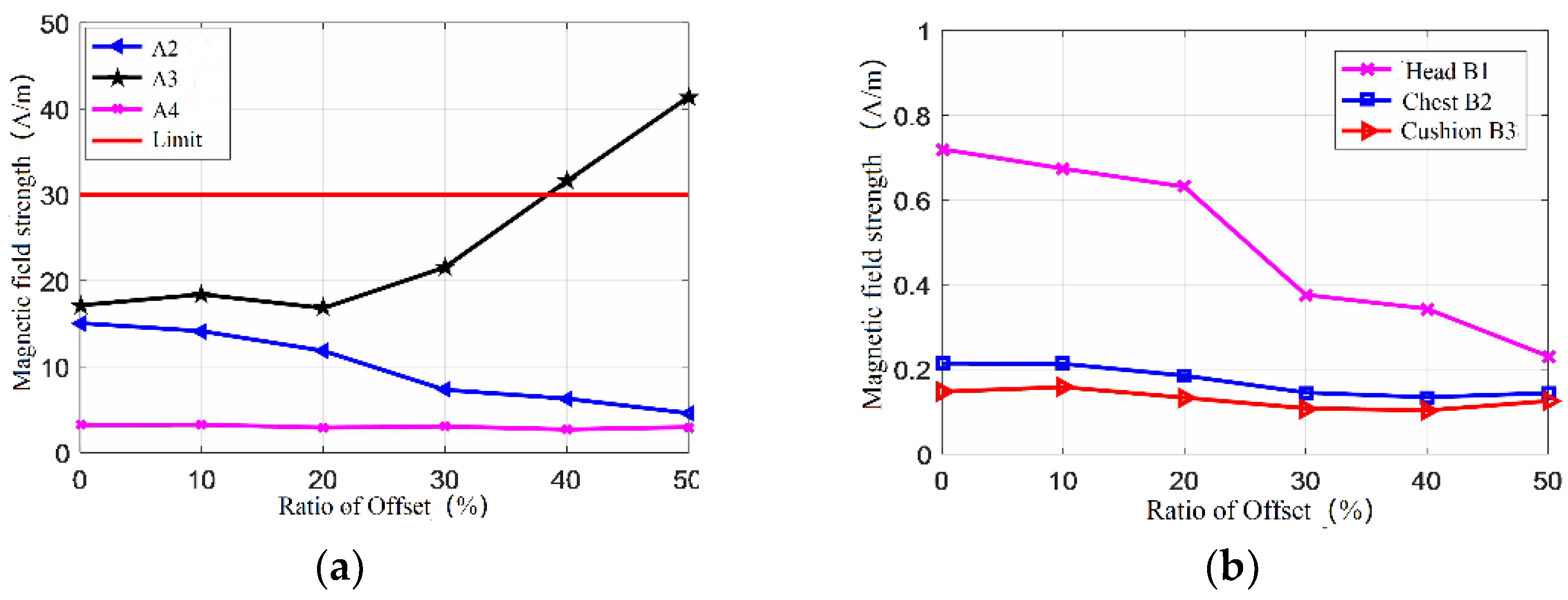
Figure 16.
Magnetic field strength: (a) test points of A2, A3, A4; (b) test points of B1, B2, B3.
Figure 16.
Magnetic field strength: (a) test points of A2, A3, A4; (b) test points of B1, B2, B3.
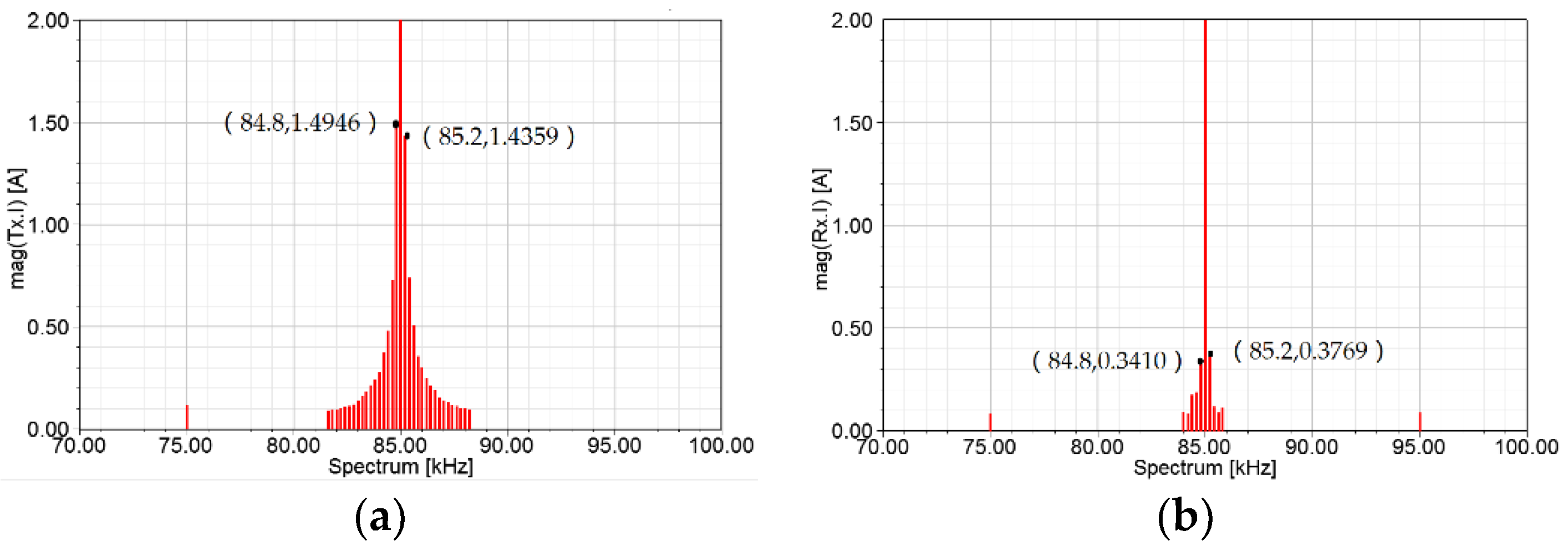
Figure 17.
Current spectrum of coupling coils: (a) current spectrum of primary coil; (b) current spectrum of secondary coil.
Figure 17.
Current spectrum of coupling coils: (a) current spectrum of primary coil; (b) current spectrum of secondary coil.
Figure 18.
Magnetic field distribution of harmonic current: (a) harmonic current at 84.8 kHz; (b) harmonic current at 85.2 kHz.
Figure 18.
Magnetic field distribution of harmonic current: (a) harmonic current at 84.8 kHz; (b) harmonic current at 85.2 kHz.
Figure 19.
Comparison of different magnetic field: (a) alignment; (b) 30% offset.
Figure 19.
Comparison of different magnetic field: (a) alignment; (b) 30% offset.
Figure 20.
PWM signal of mosfet.
Figure 20.
PWM signal of mosfet.
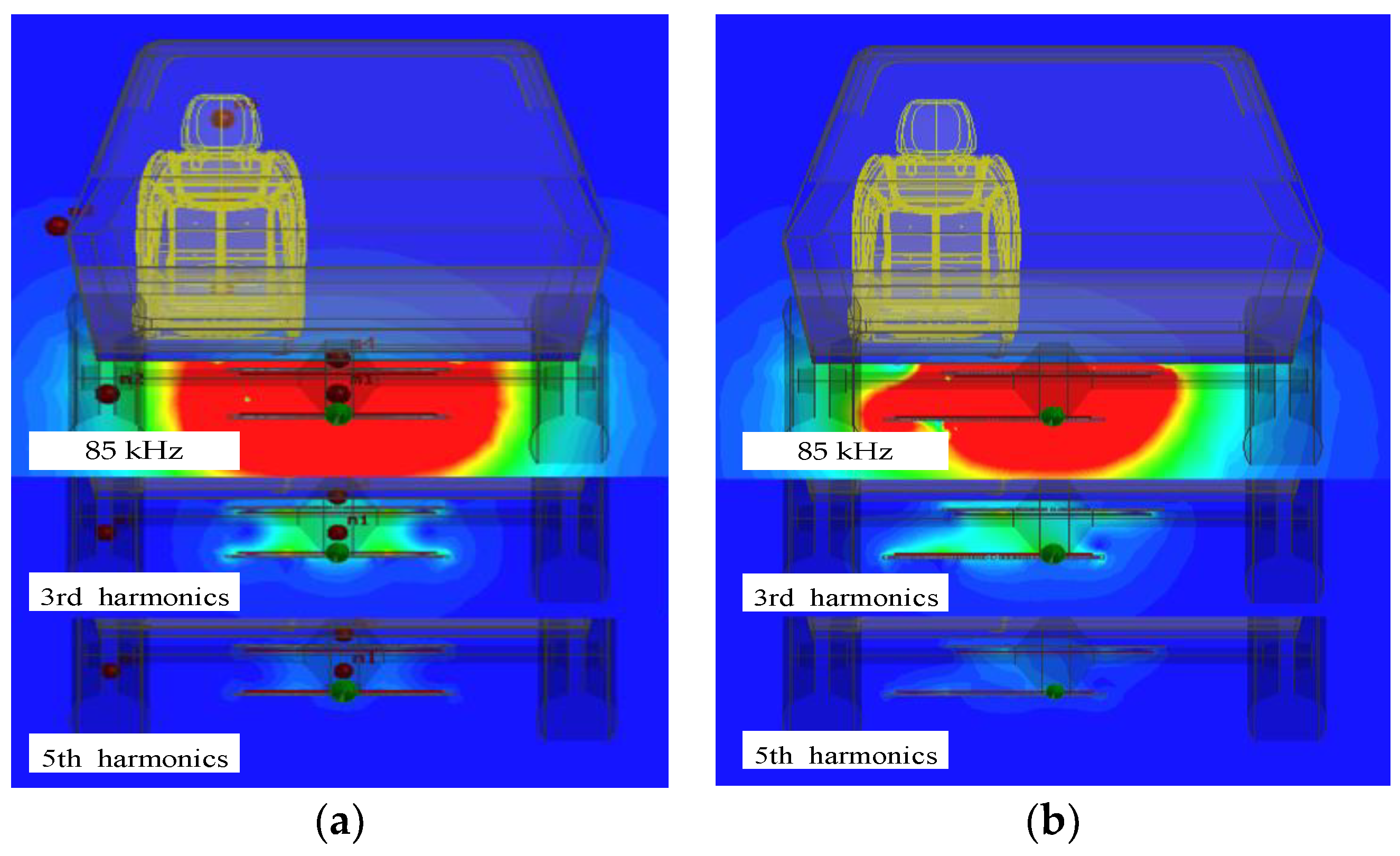
Figure 21.
Far-field magnetic field distribution on fundamental current and third-order harmonic current: (a) alignment; (b) 30% offset.
Figure 21.
Far-field magnetic field distribution on fundamental current and third-order harmonic current: (a) alignment; (b) 30% offset.
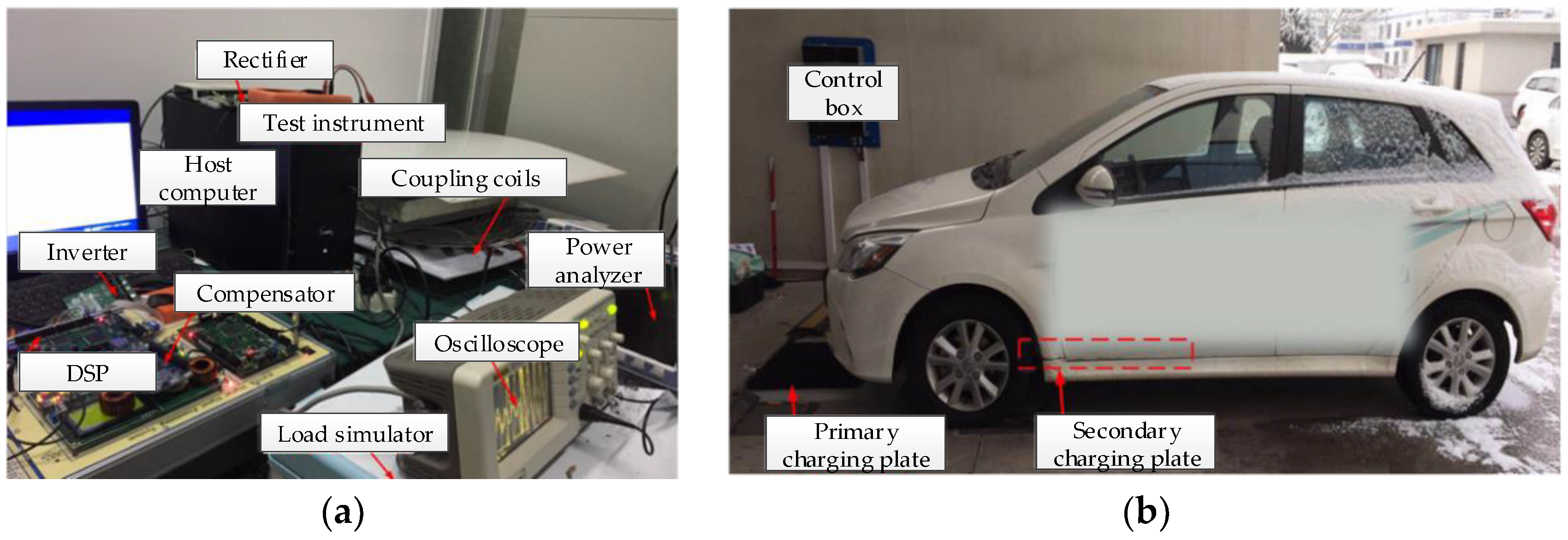
Figure 22.
Experiment condition: (a) wireless charging test bench; (b) experiment vehicle.
Figure 22.
Experiment condition: (a) wireless charging test bench; (b) experiment vehicle.
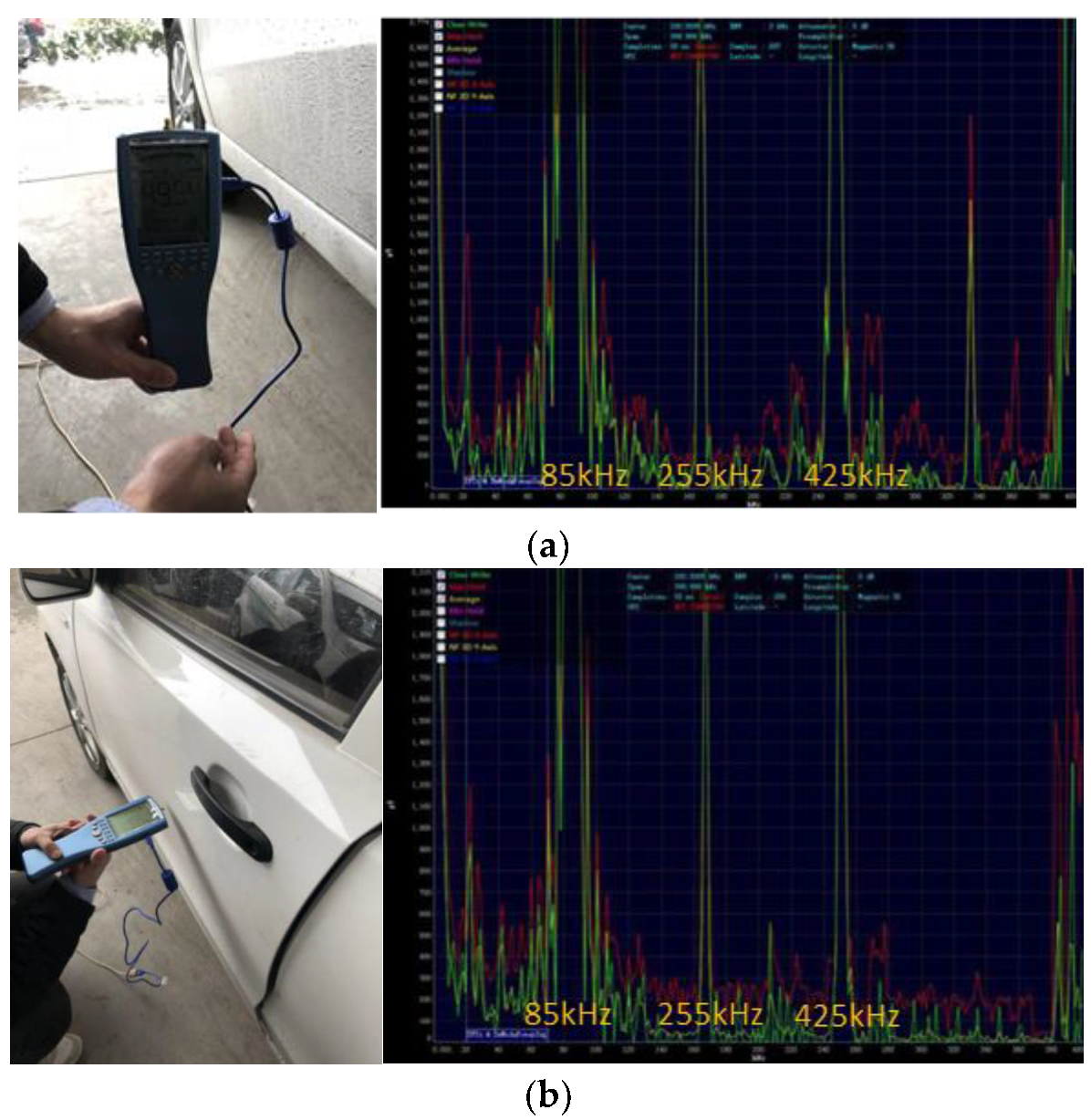
Figure 23.
Testing at different points: (a) the antenna; (b) 7.5 cm point from the ground; (c) the seat.
Figure 23.
Testing at different points: (a) the antenna; (b) 7.5 cm point from the ground; (c) the seat.
Figure 24.
Magnetic induction intensity (pT) measurement of A3: (a) y-axis; (b) z-axis.
Figure 24.
Magnetic induction intensity (pT) measurement of A3: (a) y-axis; (b) z-axis.
Table 1.
Main components of the input and output modules.
Table 1.
Main components of the input and output modules.
| Parts | Structure | Parameters |
|---|
| PFC | Boost PFC | LPFC, CPFC |
| Filter | LC filter | Lo, Co |
Table 2.
Parameters of coils and ferrites.
Table 2.
Parameters of coils and ferrites.
| Coil Attribute Name | Value/Type | Ferrites Attribute Name | Value/Type |
|---|
| Coil geometry | Planar spiral | Ferrite material | Ferroxcube 3C94 |
| Outer diameter | 600 mm | Long ferrite size | 240 mm × 15 mm × 9 mm |
| Inner diameter | 300 mm | Short ferrite size | 180 mm × 15 mm × 9 mm |
| Number of turns | 16 | Long ferrite quantity | 18 |
| Conductor diameter | 3.9 mm | Short ferrite quantity | 18 |
| Litz conductor | II(16AWG4×5X24/36) | Adjacent ferrite angle | 10° |
Table 3.
Simulated and measured parameters of coils.
Table 3.
Simulated and measured parameters of coils.
| Parameters | Symbol | Simulated | Measured | Error (Percentage) |
|---|
| Self-inductance (µH) | L1L2 | 248.24 | 266 | 17.76 (6.7%) |
| Mutual inductance (µH) | M | 95.74 | 100 | 4.26 (4.3%) |
| Coupling coefficient | k | 0.3902 | 0.36 | 0.0302 (8.3%) |
Table 4.
Parameters of compensation circuit.
Table 4.
Parameters of compensation circuit.
| Parameters | Symbol | Value |
|---|
| Compensation inductance | Lf1Lf2 | 42.4 µH |
| Compensation capacitance 1 | Cf1Cf2 | 82.7 nF |
| Compensation capacitance 2 | C1C2 | 19.1 nF |
Table 5.
General public basic restriction of magnetic field.
Table 5.
General public basic restriction of magnetic field.
| Limits | Area | Root-Mean-Square Limit | Peak Limit |
|---|
| EMF Standard | 2a, 2b, 3 | 27 uT or 21.4 A/m | 38.2 uT or 30.4 A/m |
| Pacemaker/IMD Limit | 3, 2b | 15 uT or 11.9 A/m | 21.2 uT or 16.9 A/m |
| Pacemaker/IMD Limit | 2a | 29.4 uT or 23.4 A/m | 41.6 uT or 33.1 A/m |
Table 6.
Position and magnetic field strength of test points.
Table 6.
Position and magnetic field strength of test points.
| Test Point | Coordinates (mm) | Magnetic Field Strength (A/m) |
|---|
| A1 | (0,0,75) | 1223 |
| A2 | (0,0,210) | 13.07 |
| A3 | (0,740,75) | 14.15 |
| A4 | (0,840,700) | 3.22 |
| B1 | (550,0,1200) | 0.21 |
| B2 | (550,0,950) | 0.15 |
| B3 | (360,0,670) | 0.72 |
Table 7.
Magnetic field strength at test points (A/m).
Table 7.
Magnetic field strength at test points (A/m).
| Frequency | A2 | A3 | A4 | B1 | B2 | B3 |
|---|
| 84.8 kHz | 0.86 | 1.75 | 0.22 | 0.02 | 0.03 | 0.13 |
| 85.2 kHz | 0.83 | 1.76 | 0.22 | 0.02 | 0.03 | 0.13 |
Table 8.
Harmonic currents with the offset (A/m).
Table 8.
Harmonic currents with the offset (A/m).
| Offset | Primary 3rd Harmonic | Secondary 3rd Harmonic | Primary 5th Harmonic | Secondary 5th Harmonic |
|---|
| 0 | 0.5399 | 0.3724 | 0.1034 | 0.1034 |
| 10% | 0.5291 | 0.3661 | 0.1020 | 0.1060 |
| 20% | 0.5140 | 0.3611 | 0.1103 | 0.1056 |
| 30% | 0.5776 | 0.3681 | 0.1286 | 0.1191 |
| 40% | 0.7801 | 0.3211 | 0.954 | 0.1152 |
| 50% | 0.9573 | 0.1659 | 0.736 | 0.0625 |
Table 9.
Magnetic field strength at three meters around the vehicle.
Table 9.
Magnetic field strength at three meters around the vehicle.
| Frequency | Front | Rear | Left | Right | Limit |
|---|
| 85 kHz | 88.79 | 87.45 | 97.63 | 98.29 | 28.5 |
| 255 kHz | 76.23 | 60.37 | 69.89 | 70.24 | 18.95 |
| 85 kHz (30% offset) | 86.12 | 84.24 | 91.23 | 92.11 | 28.5 |
| 255 kHz (30% offset) | 76.07 | 60.19 | 69.47 | 69.67 | 18.95 |
Table 10.
Experimental results are compared with simulation results (A/m).
Table 10.
Experimental results are compared with simulation results (A/m).
| Test Point | Experimental Results | Simulation Results | Difference |
|---|
| A2 | 14.55 | 13.07 | 0.52 |
| A3 | 17.73 | 14.15 | 3.58 |
| A4 | 1.85 | 3.22 | 1.37 |
| B1 | 0.40 | 0.21 | 0.19 |
| B2 | 0.38 | 0.15 | 0.23 |
| B3 | 0.84 | 0.72 | 0.12 |
Table 11.
Magnetic field strength at different offsets (A/m).
Table 11.
Magnetic field strength at different offsets (A/m).
| Offset | Experimental Results | Simulation Results |
|---|
| A2 | A3 | A4 | A2 | A3 | A4 |
|---|
| 60 mm | 15.1 | 17.9 | 3.1 | 15.4 | 18.2 | 3.4 |
| 120 mm | 11.9 | 17.2 | 3.2 | 12.3 | 17.8 | 3.3 |
| 180 mm | 7.5 | 20.5 | 3.3 | 7.8 | 20.8 | 3.4 |
| 240 mm | 6.3 | 30.7 | 3.0 | 6.5 | 31.2 | 3.3 |
| 300 mm | 4.5 | 41.2 | 3.2 | 4.7 | 41.6 | 3.4 |
| Error | A2 | 1.4 (3.1%) | A3 | 2.1 (1.6%) | A4 | 1 (6%) |
Table 12.
Magnetic field strength in the xy direction of sideband and harmonic currents with 30% offset (A/m).
Table 12.
Magnetic field strength in the xy direction of sideband and harmonic currents with 30% offset (A/m).
| Offset | Experimental Results | Simulation Results |
|---|
| 0 mm | 180 mm | Error | 0 mm | 180 mm | Error |
|---|
| 84.8 kHz | 1.82 | 2.13 | 0.31 | 1.75 | 2.05 | 0.3 |
| 85.2 kHz | 1.81 | 2.02 | 0.21 | 1.76 | 1.95 | 0.19 |
| 255 kHz | 0.54 | 0.58 | 0.04 | 0.54 | 0.58 | 0.04 |
| 435 kHz | 0.11 | 0.13 | 0.02 | 0.10 | 0.13 | 0.03 |



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}