Time-Aware Monitoring of Overhead Transmission Line Sag and Temperature with LoRa Communication


Abstract
:1. Introduction
1.1. Related Work
1.2. Motivation and Contribution
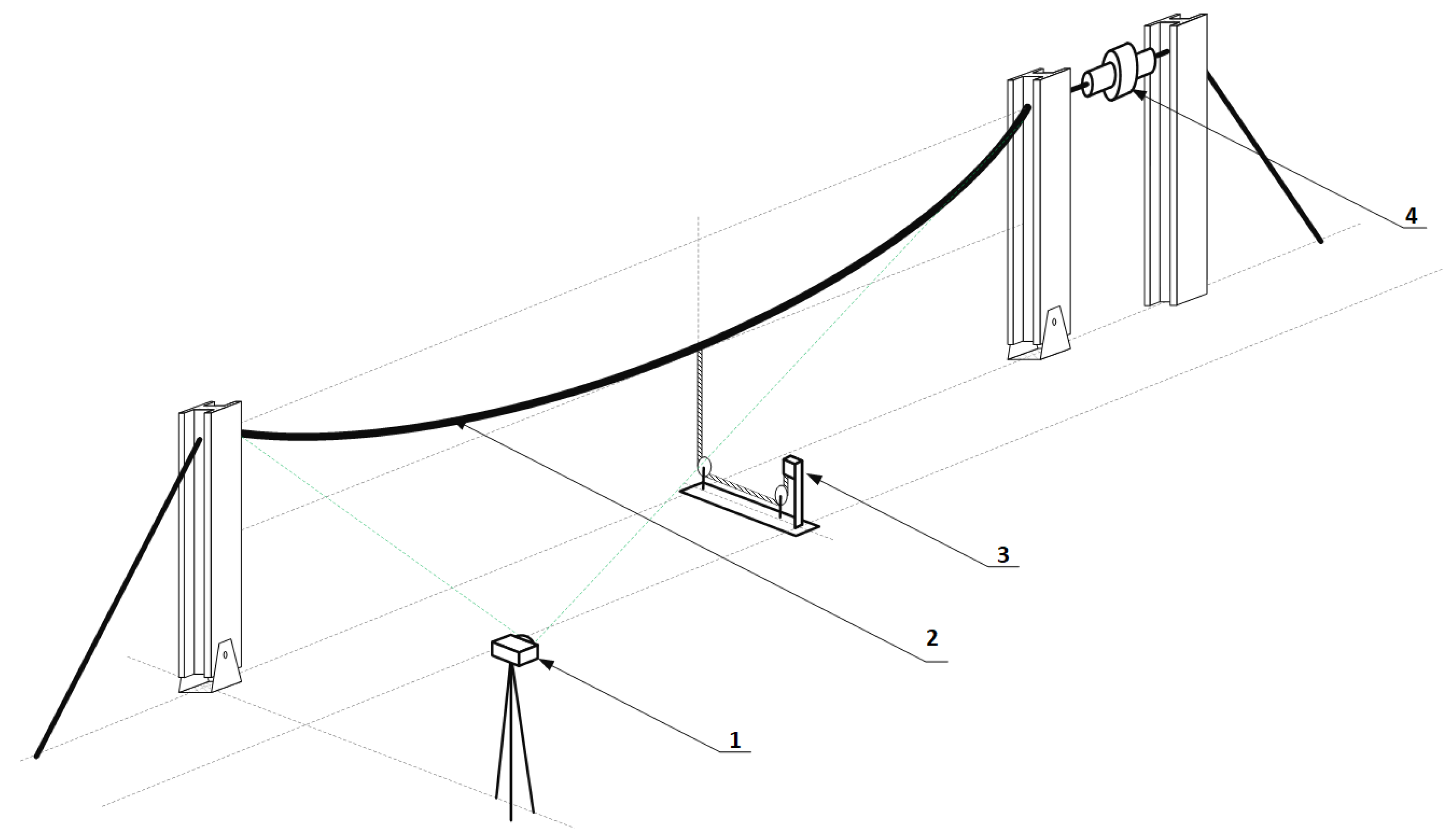
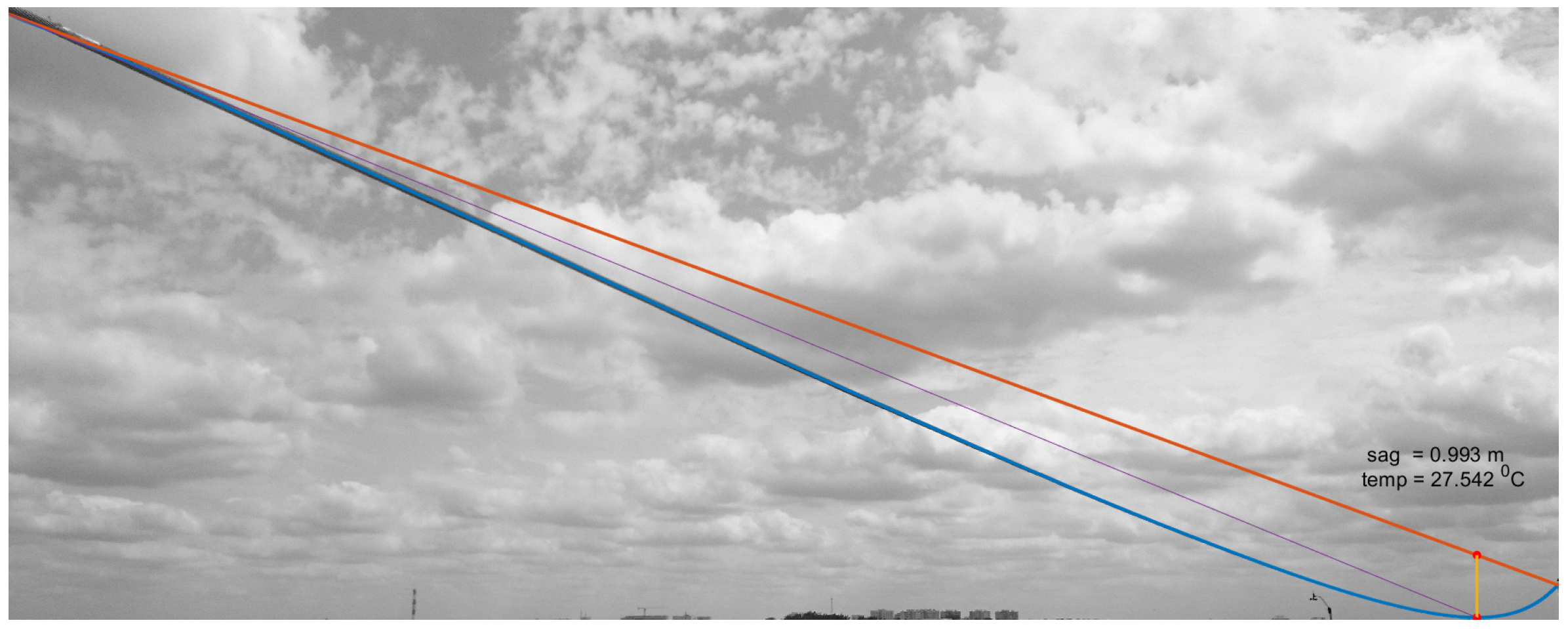
- The concept of a vision system for spans’ contactless sag–temperature monitoring is presented;
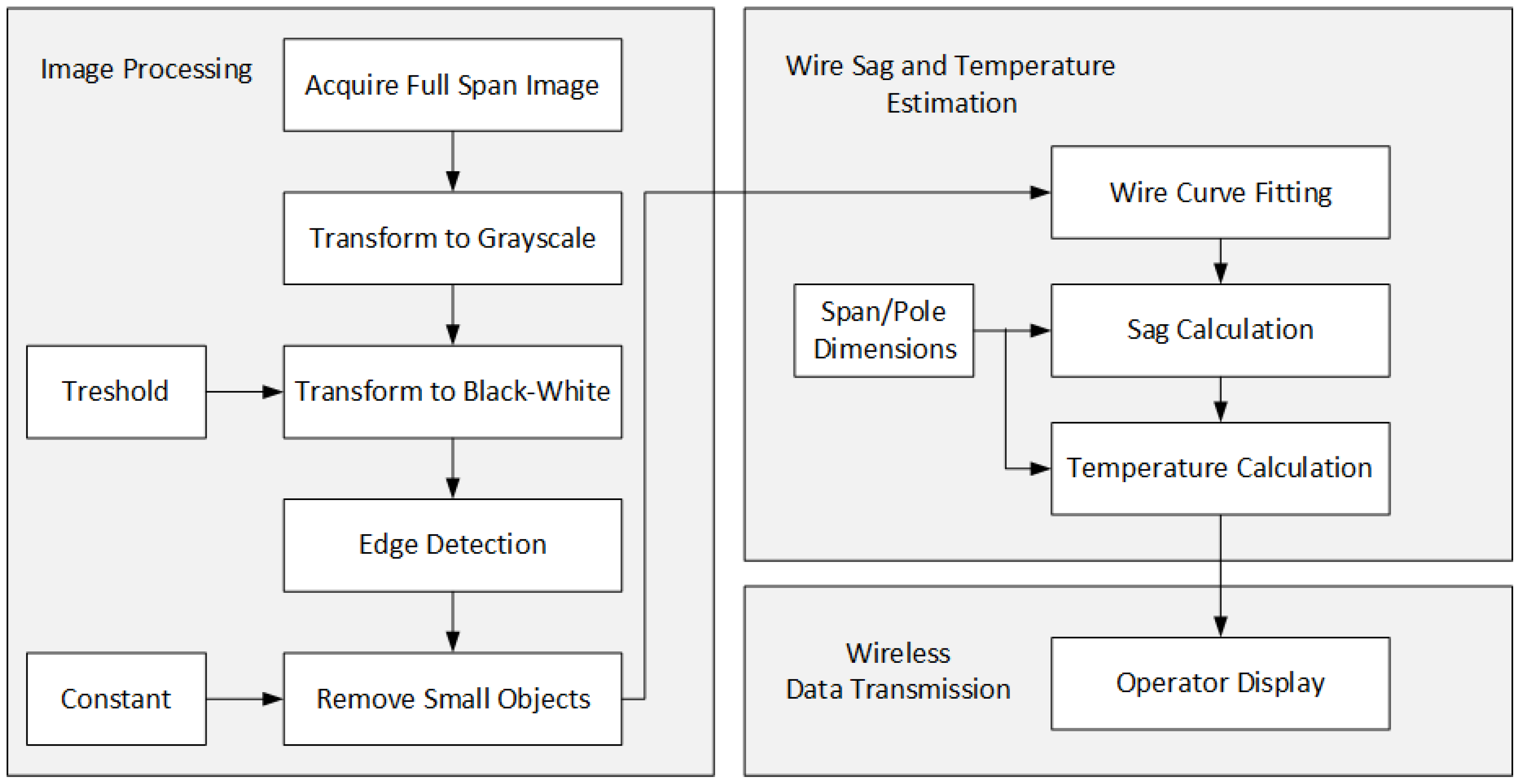
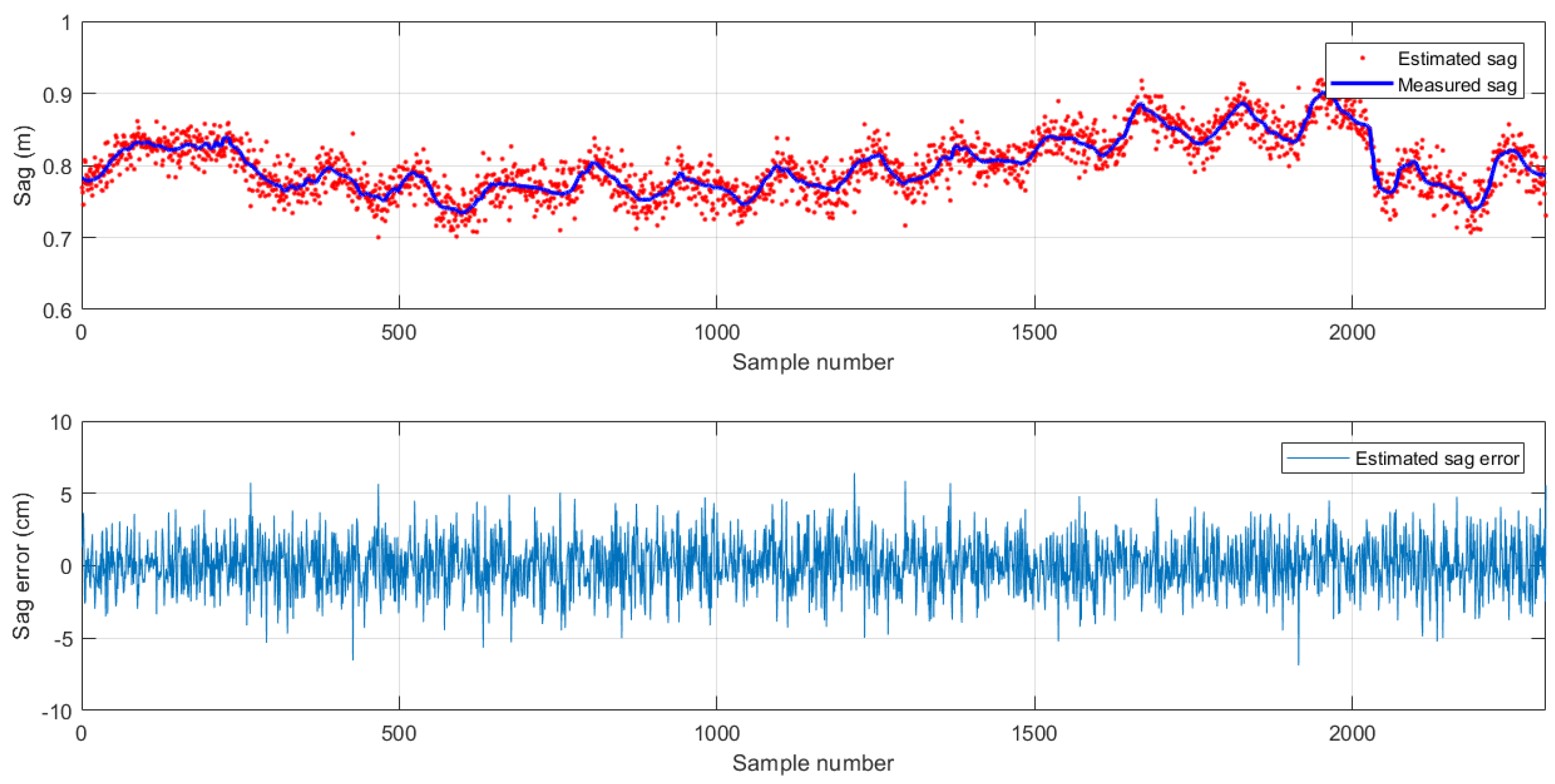
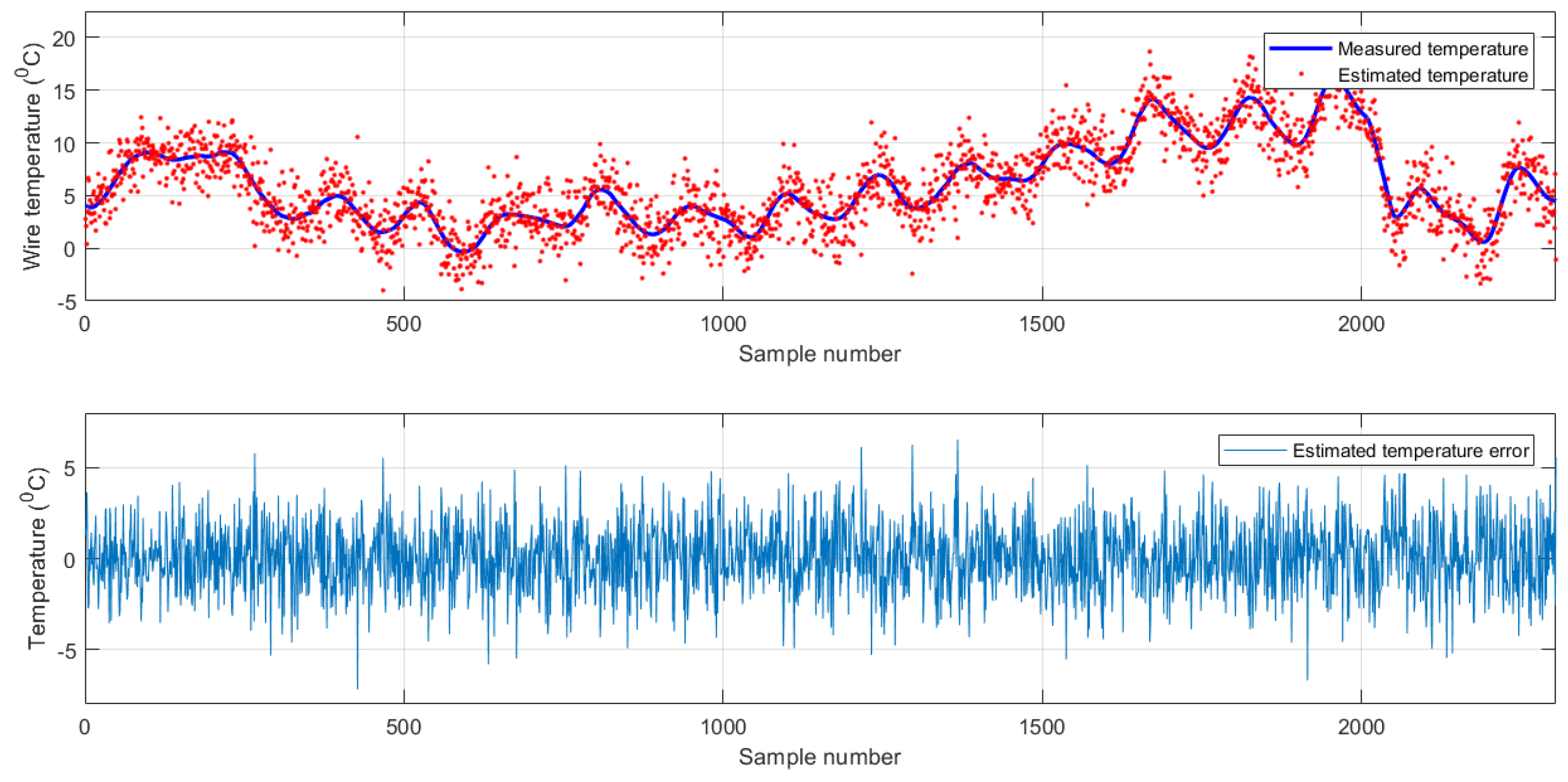
- The algorithm of image processing for wire sag–temperature estimation is implemented and its operational performance is practically measured;
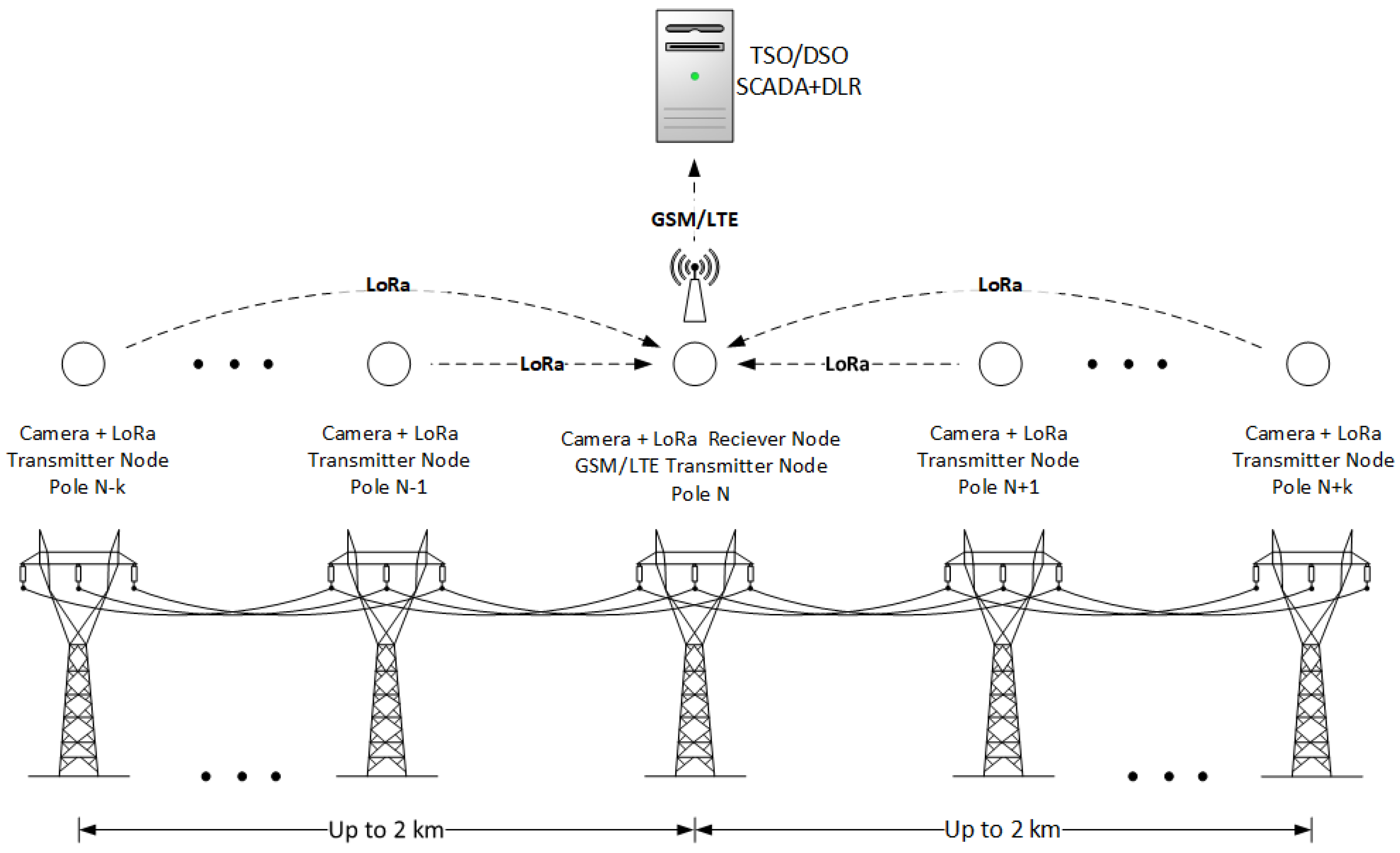
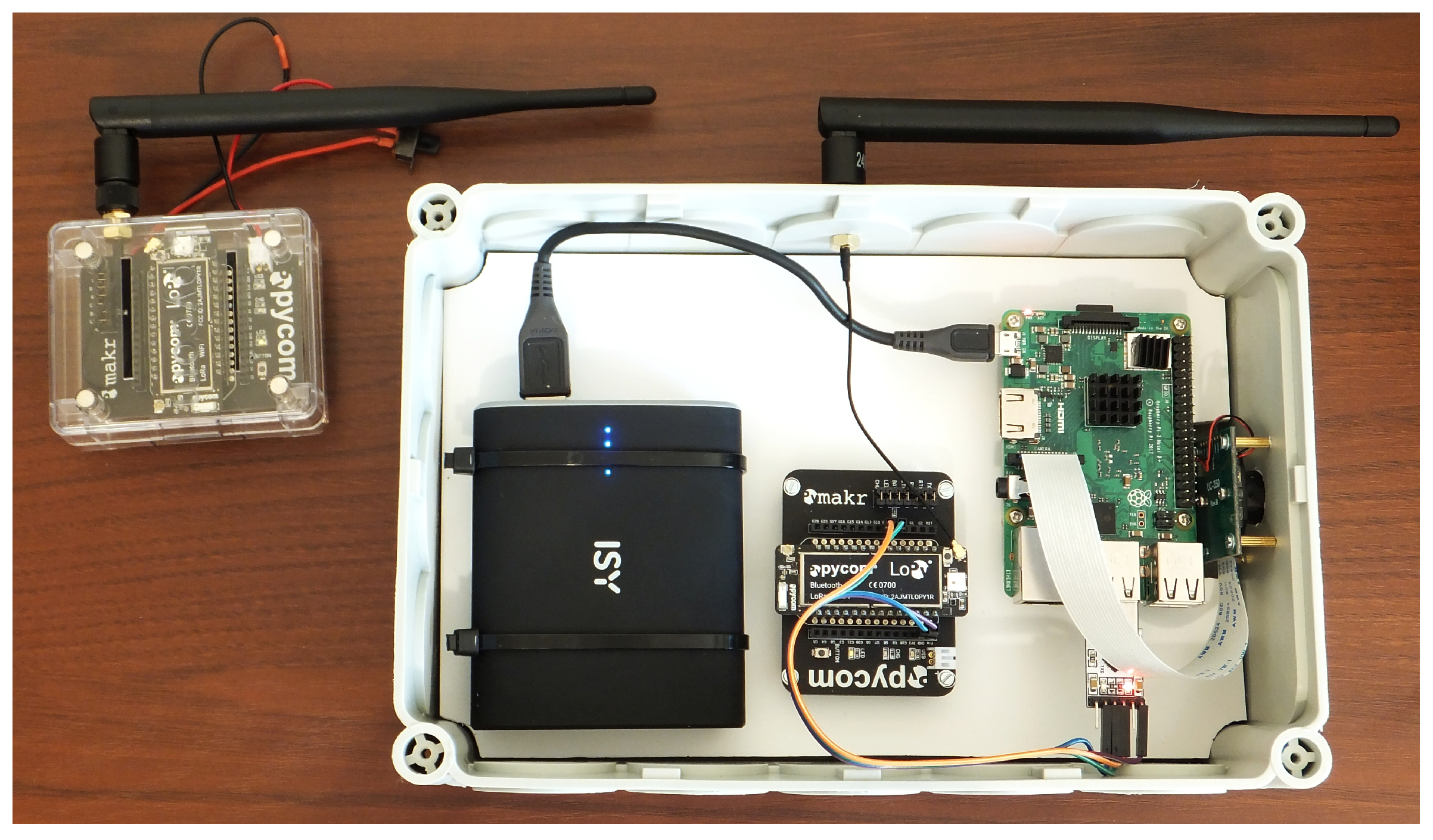
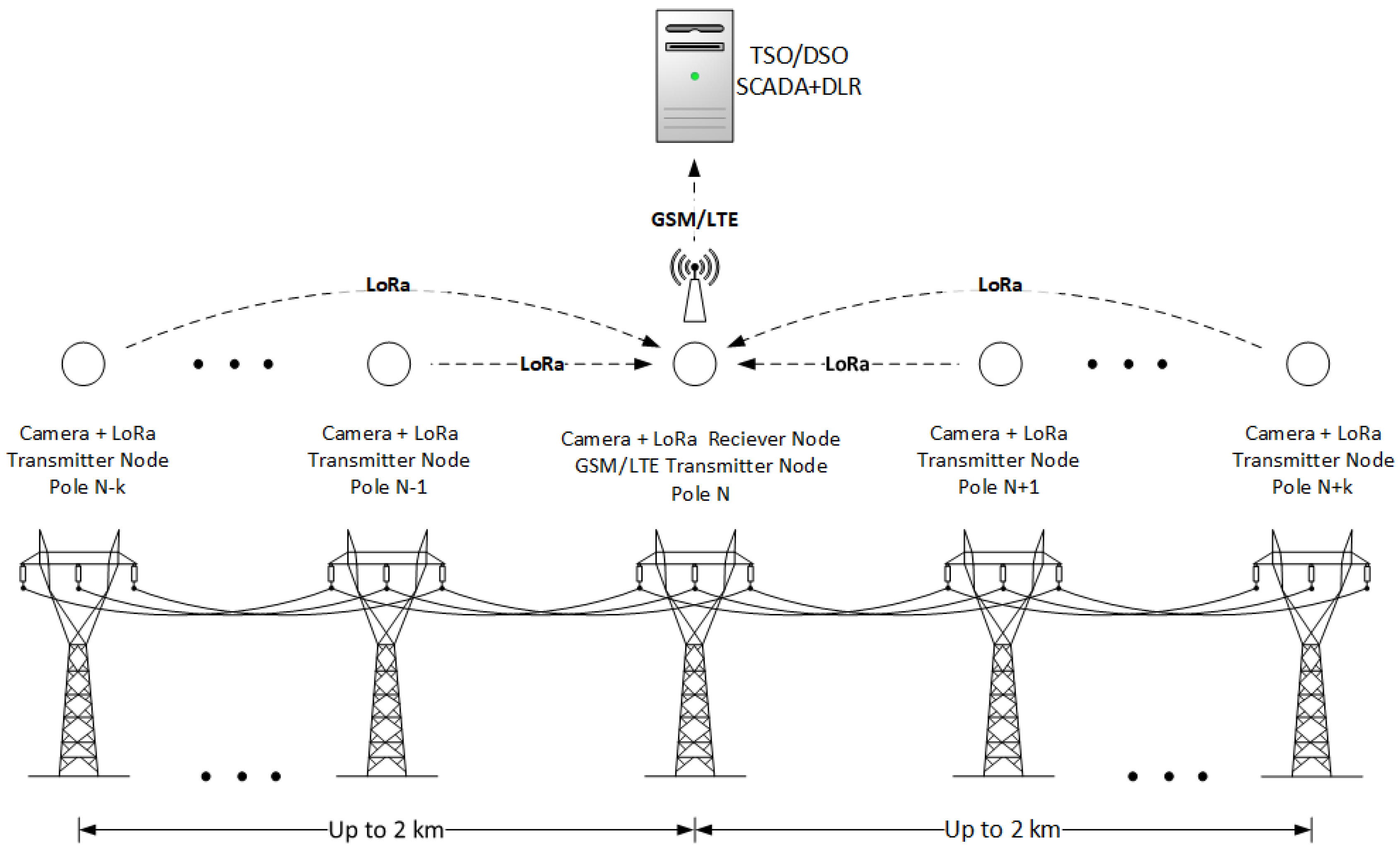
- The communication architecture based on LoRa is proposed, and in-situ data transmission performance under 110 kV power line is investigated;
- The proposed system for monitoring real OTL consisting of 80 poles is modeled in Automated Quality of Protection Analysis (AQoPA) and examined for overall performance.
2. The Vision System for Transmission Line Sag and Temperature Monitoring with LoRa Communication
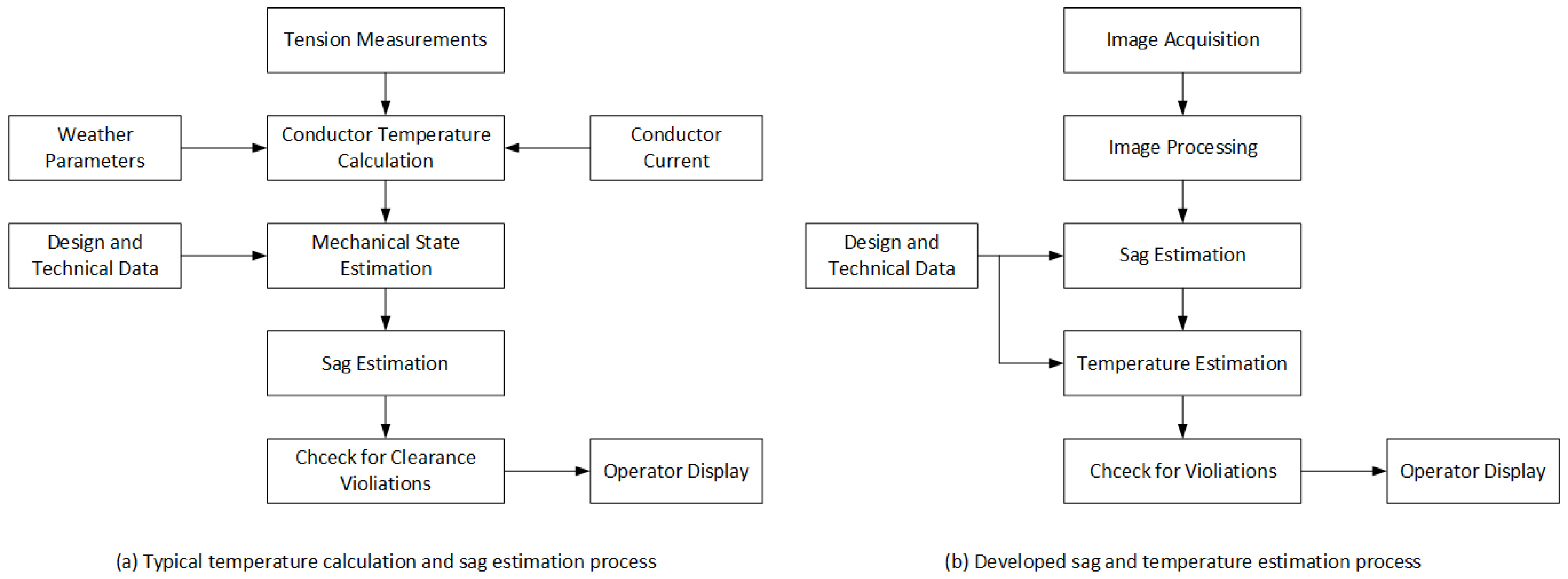
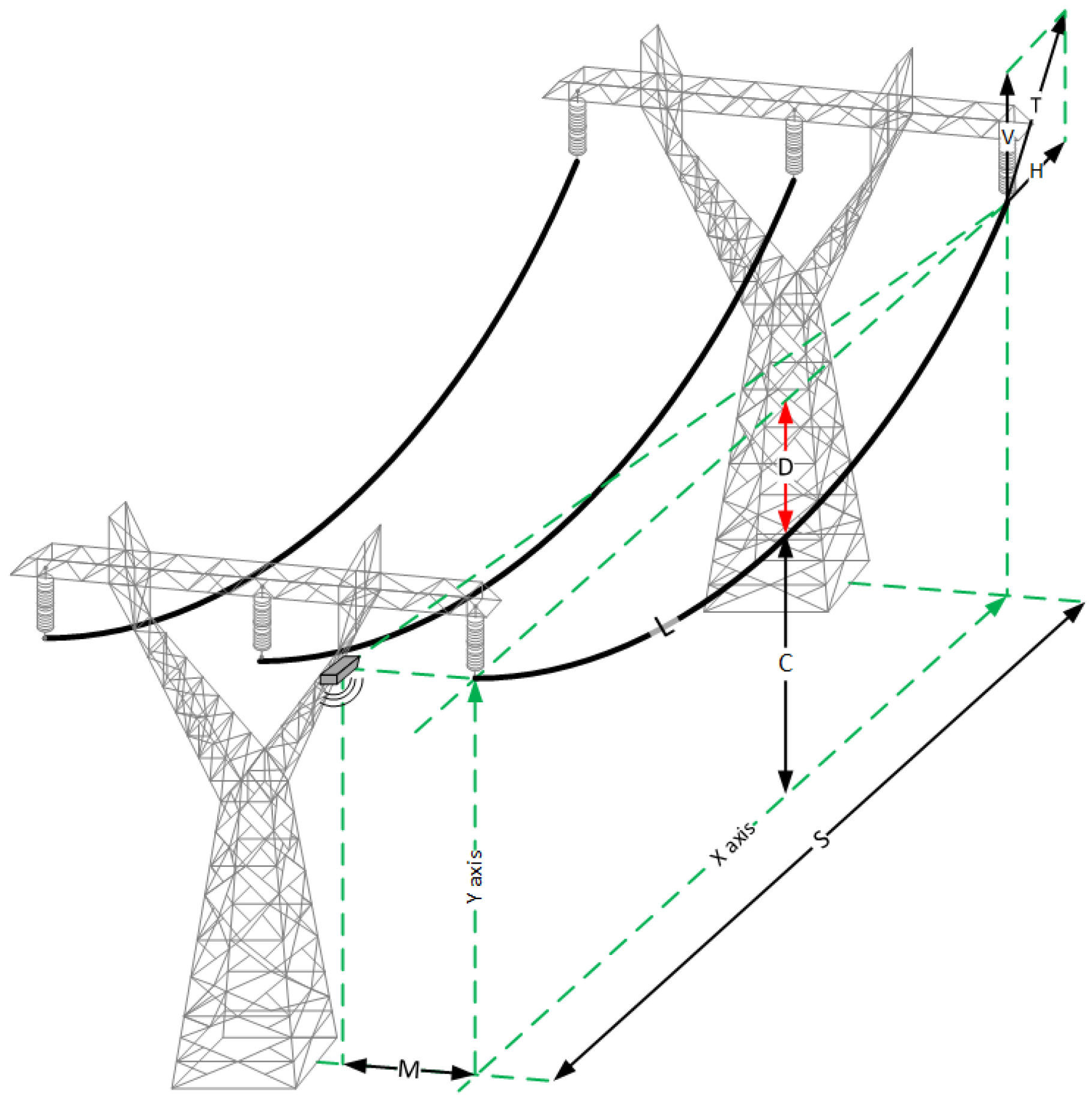
2.1. Sag–Tension Calculations of the Transmission Line Span
2.2. Communication Architecture of the Transmission Line Sag and Temperature Monitoring System
2.3. LoRa Communication Configuration
3. Results
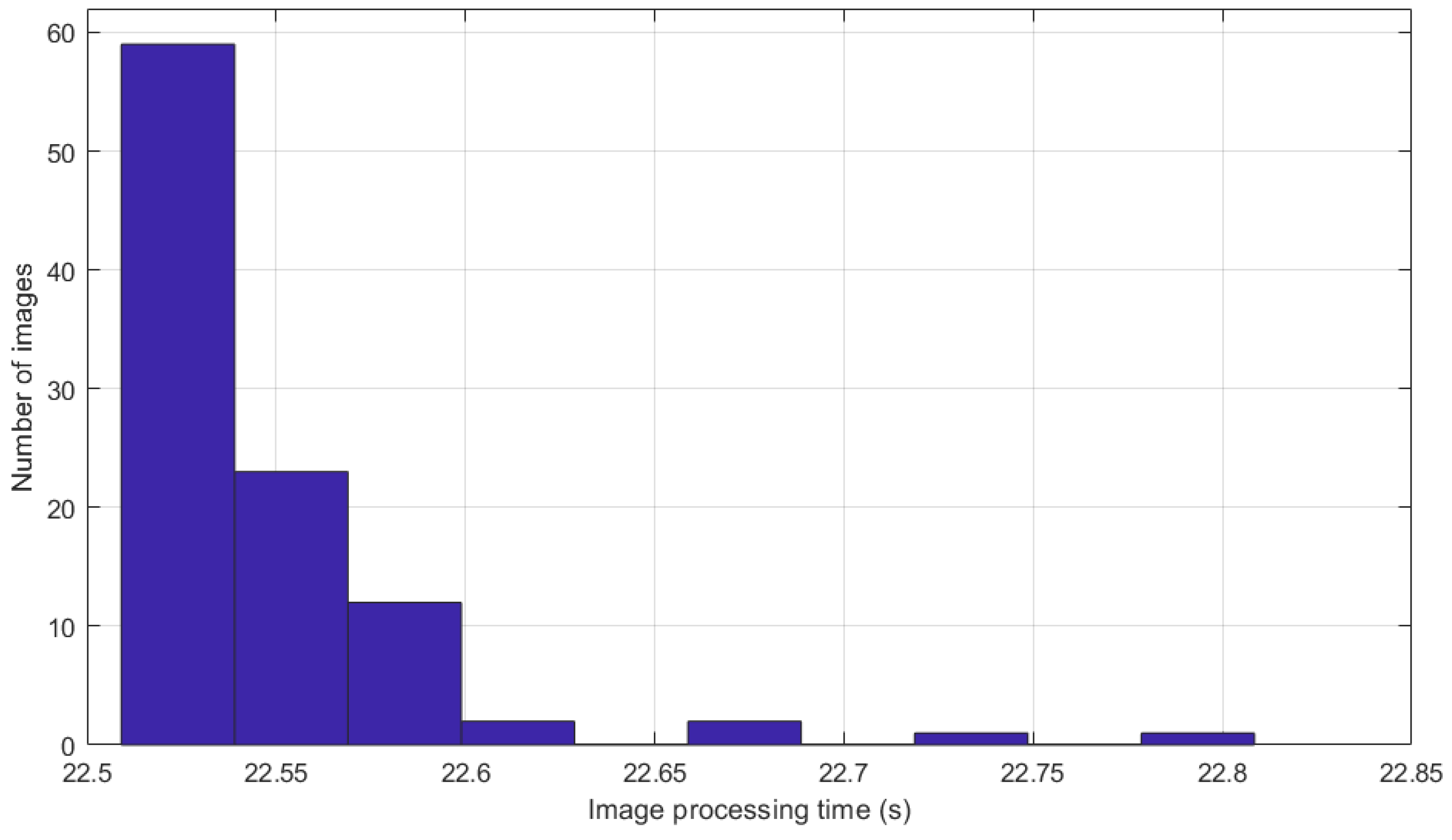
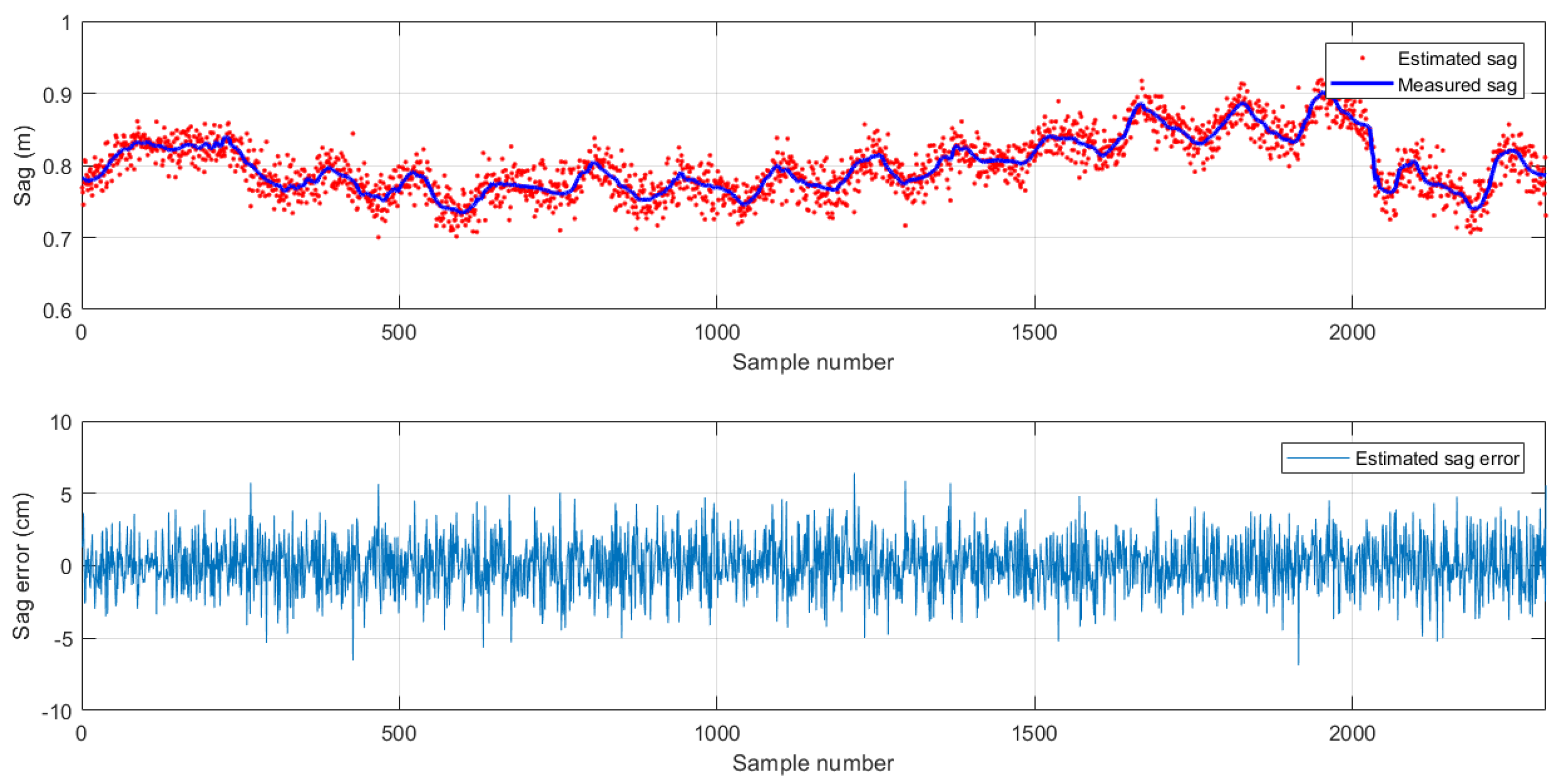
3.1. The Image Processing Algorithm for Wire Sag and Temperature Estimation
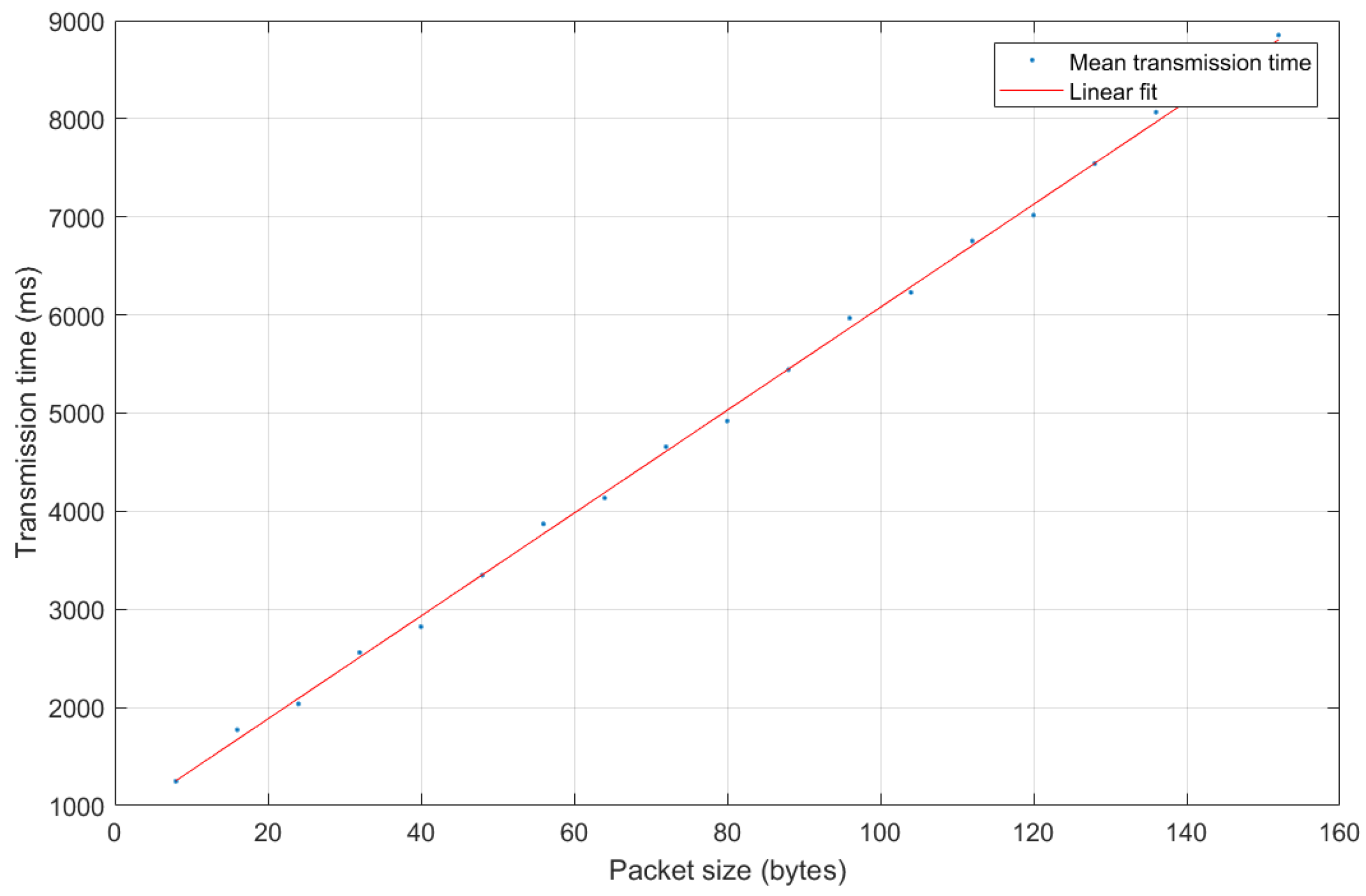
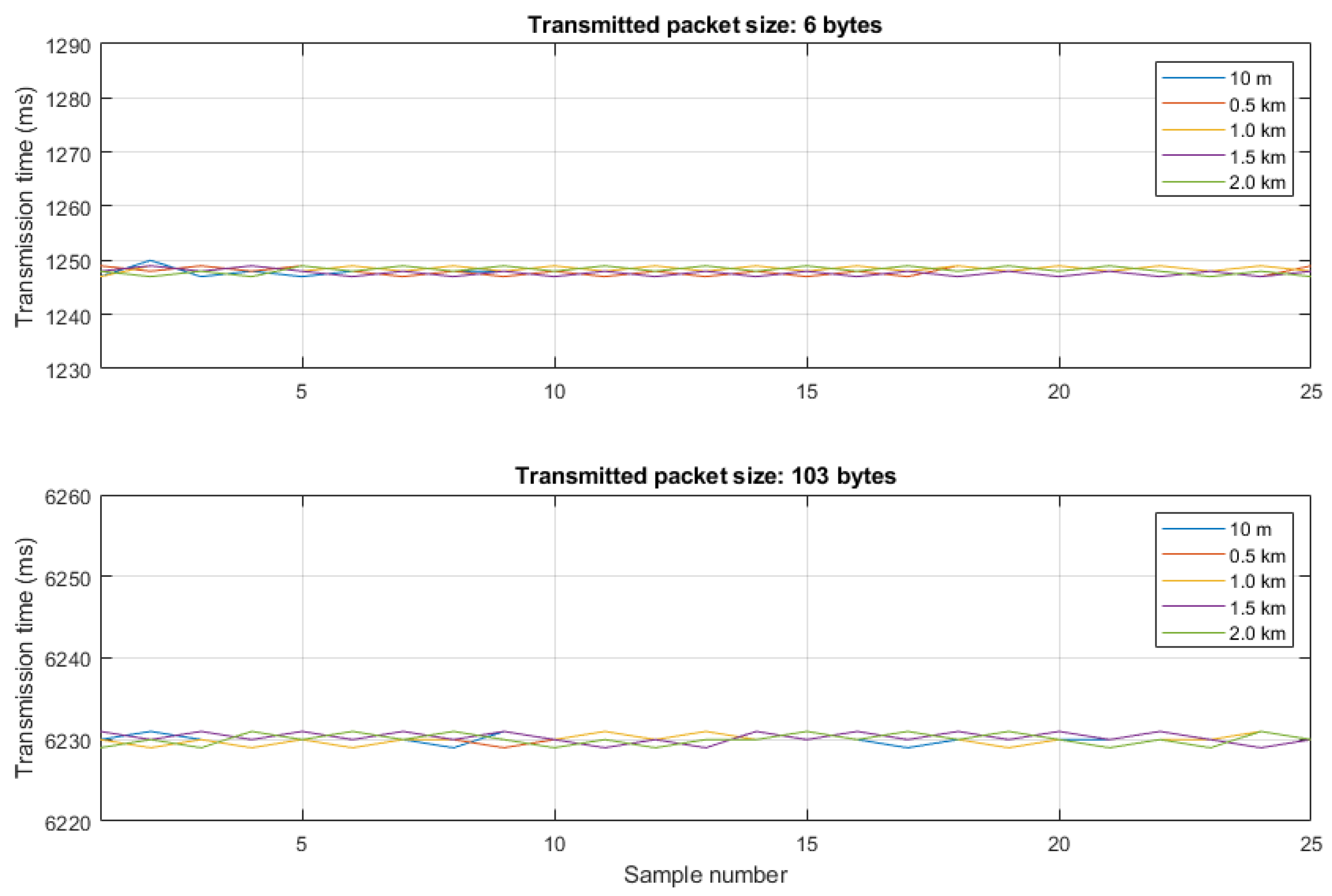
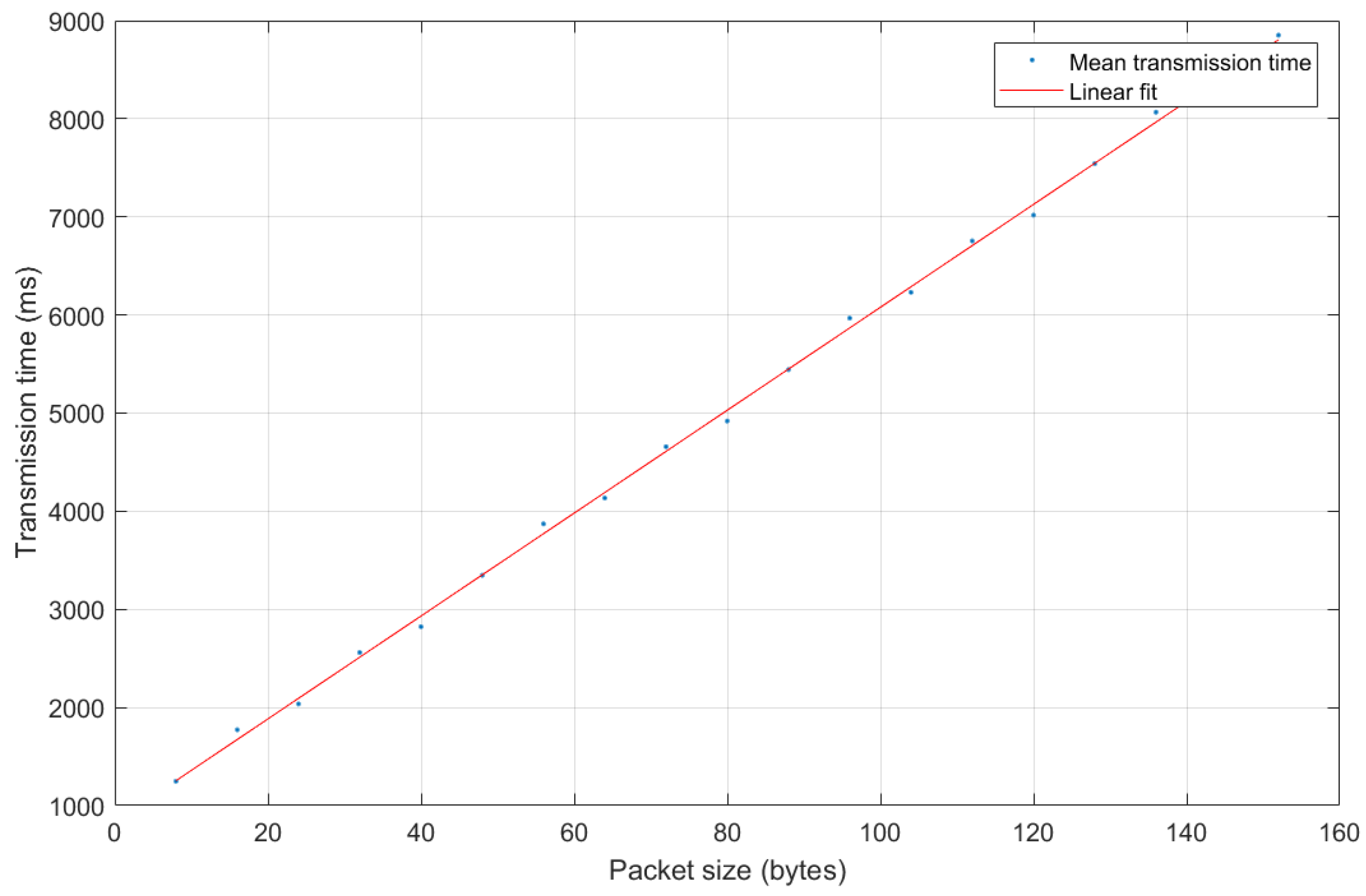
3.2. LoRa Experiment and Results
4. Modeling and Performance Analysis of the Vision System with LoRa Communication
4.1. The Model
4.2. Scenarios
Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| WSN | Wireless Sensor Network |
| DLR | Dynamic Line Rating |
| ICTs | Information and Communication Technologies |
| CPU | Central Processing Unit |
| PS | Power System |
| SE | State Estimation |
| OTL | Overhead Transmission Line |
| QoP-ML | Quality of Protection Modeling Language |
| AQoPA | Automated Quality of Protection Analysis |
| SCADA | Supervisory Control And Data Acquisition |
| RES | Renewable Energy Sources |
| LoRa | Long Range |
| CNN | Convolutional Neural Network |
| IED | Intelligent Electronic Device |
Appendix A
Appendix A.1. Single Span Image Processing and Sag Estimation


Appendix A.2. QoP-ML Listings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| hosts | 1 |
| { | 2 |
| host BaseStation(rr)(*) { ... } | 3 |
| host Sensor(rr)(*) { ... } | 4 |
| host Sink(rr)(*) { ... } | 5 |
| host Manager(fifo)(*) { ... } | 6 |
| } | 7 |
| host BaseStation(rr)(*) | 1 |
| { | 2 |
| process Main(*) | 3 |
| { | 4 |
| while(true) | 5 |
| { | 6 |
| in(ch_WSN: DATA_MSG: |*, id(), sink_data_msg()|); | 7 |
| bsDATA = DATA_MSG[3]; | 8 |
| save_collected_data(bsDATA)[UPDATED]; | 9 |
| } | 10 |
| } | 11 |
| } | 12 |
| host Sensor(rr)(*) | 1 |
| { | 2 |
| # img = process_image(); | 3 |
| 4 | |
| process Main(*) | 5 |
| { | 6 |
| in(ch_WSN: PARAMS_MSG: |*, id(), params_msg()|); | 7 |
| PARAMS = PARAMS_MSG[3]; | 8 |
| SINK_ID = PARAMS_MSG[0]; | 9 |
| 10 | |
| GATHERED_DATA = collected_data()[UPDATED]; | 11 |
| save_collected_data(GATHERED_DATA)[UPDATED]; | 12 |
| 13 | |
| COLLECTED_NOTIFICATION_MSG = (id(), broadcast(), data_collected_msg()); | 14 |
| out(ch_MGNT: COLLECTED_NOTIFICATION_MSG); | 15 |
| 16 | |
| DATA_MSG = (id(), SINK_ID, data_msg(), GATHERED_DATA); | 17 |
| out(ch_WSN: DATA_MSG); | 18 |
| } | 19 |
| } | 20 |
| host Sink(rr)(*) | 1 |
| { | 2 |
| # COLLECTED_DATA = empty_list(); | 3 |
| 4 | |
| process Main(*) | 5 |
| { | 6 |
| in(ch_MGNT: NODES_MSG: |*, id(), nodes_msg()|); | 7 |
| NODES_LIST = NODES_MSG[3]; | 8 |
| 9 | |
| TMP_NODES_LIST = NODES_LIST; | 10 |
| 11 | |
| while (is_list_empty(TMP_NODES_LIST) != true) { | 12 |
| 13 | |
| PARAMS = generate_params(); | 14 |
| 15 | |
| NODE_ID = get_from_list(TMP_NODES_LIST); | 16 |
| TMP_NODES_LIST = pop_list(TMP_NODES_LIST); | 17 |
| 18 | |
| PARAMS_MSG = (id(), NODE_ID, params_msg(), PARAMS); | 19 |
| out(ch_WSN: PARAMS_MSG); | 20 |
| } | 21 |
| } | 22 |
| 23 | |
| process WaitForData(*) { | 24 |
| 25 | |
| in(ch_MGNT: NODES_MSG2: |*, id(), nodes_msg()|); | 26 |
| TMP_NODES_LIST2 = NODES_MSG2[3]; | 27 |
| 28 | |
| while (is_list_empty(TMP_NODES_LIST2) != true) { | 29 |
| 30 | |
| in(ch_WSN: DATA_MSG_FROM_SENSORS: |*, id(), data_msg()|); | 31 |
| DATA_FROM_SENSORS = DATA_MSG_FROM_SENSORS[3]; | 32 |
| 33 | |
| save_collected_data(DATA_FROM_SENSORS)[UPDATED]; | 34 |
| COLLECTED_DATA = add_to_list(COLLECTED_DATA, DATA_FROM_SENSORS); | 35 |
| 36 | |
| TMP_NODES_LIST2 = pop_list(TMP_NODES_LIST2); | 37 |
| } | 38 |
| } | 39 |
| 40 | |
| process HopByHopComm(*) | 41 |
| { | 42 |
| in(ch_WSN: SINK_DATA_MSG: |*, id(), sink_data_msg()|); | 43 |
| DATA_FROM_SINK = SINK_DATA_MSG[3]; | 44 |
| COLLECTED_DATA2 = add_to_list(COLLECTED_DATA, DATA_FROM_SINK); | 45 |
| 46 | |
| NEXT_HOP_ID = routing_next(wsn, id(BaseStation.0)); | 47 |
| DATA_MSG = (id(), NEXT_HOP_ID, sink_data_msg(), COLLECTED_DATA2); | 48 |
| out(ch_WSN: DATA_MSG); | 49 |
| } | 50 |
| 51 | |
| } | 52 |
| functions | 1 |
| { | 2 |
| fun empty_list(); | 3 |
| fun add_to_list(list, element); | 4 |
| fun get_from_list(list); | 5 |
| fun pop_list(list); | 6 |
| fun is_list_empty(list); | 7 |
| 8 | |
| fun nodes_msg(); | 9 |
| fun sinks_msg(); | 10 |
| fun params_msg(); | 11 |
| fun start_sensing_msg(); | 12 |
| fun start_collecting_msg(); | 13 |
| fun data_collected_msg(); | 14 |
| fun data_req_msg(); | 15 |
| fun data_msg(); | 16 |
| fun empty(); | 17 |
| 18 | |
| fun process_image(); | 19 |
| fun generate_params(node_id); | 20 |
| fun collected_data(); | 21 |
| fun save_collected_data(data); | 22 |
| } | 23 |
| channels | 1 |
| { | 2 |
| channel ch_WSN(*)[wsn]; | 3 |
| channel ch_MGNT(*)[mgnt]; | 4 |
| channel ch_TIMER(*)[timer]; | 5 |
| } | 6 |
| versions | 1 |
| { | 2 |
| version TransmissionLine | 3 |
| { | 4 |
| set host Sink(MicaZ); | 5 |
| set host Sensor(TelosB); | 6 |
| set host BaseStation(TelosB); | 7 |
| set host Manager(TelosB); | 8 |
| 9 | |
| run host Sink(*){10} { | 10 |
| run Main() | 11 |
| run WaitForData() | 12 |
| run Communication() | 13 |
| } | 14 |
| 15 | |
| run host Sensor(*){80} { | 16 |
| run Main() | 17 |
| } | 18 |
| 19 | |
| run host Manager(*) { | 20 |
| run PrepareMessages(*) | 21 |
| run Main() | 22 |
| } | 23 |
| 24 | |
| run host BaseStation(*) { | 25 |
| run Main() | 26 |
| } | 27 |
| 28 | |
| communication { | 29 |
| medium[wsn] { | 30 |
| default_q = 1; | 31 |
| default_time = wsn_time [ms]; | 32 |
| default_listening_current = 1.14 mA; | 33 |
| default_sending_current = 22.8 mA; | 34 |
| default_receiving_current = 22.8 mA; | 35 |
| topology { | 36 |
| 37 | |
| Manager -> Sink[0:9] : time = 0 ms; | 38 |
| 39 | |
| Sink[0] <-> Sensor[0:7] : time = 1149.428ms; | 40 |
| Sink[1] <-> Sensor[8:15] : time = 1149.428ms; | 41 |
| Sink[2] <-> Sensor[16:23] : time = 1149.428ms; | 42 |
| Sink[3] <-> Sensor[24:31] : time = 1149.428ms; | 43 |
| Sink[4] <-> Sensor[32:39] : time = 1149.428ms; | 44 |
| Sink[5] <-> Sensor[40:47] : time = 1149.428ms; | 45 |
| Sink[6] <-> Sensor[48:55] : time = 1149.428ms; | 46 |
| Sink[7] <-> Sensor[56:63] : time = 1149.428ms; | 47 |
| Sink[8] <-> Sensor[64:71] : time = 1149.428ms; | 48 |
| Sink[9] <-> Sensor[72:79] : time = 1149.428ms; | 49 |
| 50 | |
| Sink[0] -> BaseStation[0]; | 51 |
| Sink[1] -> BaseStation[0]; | 52 |
| Sink[2] -> BaseStation[0]; | 53 |
| Sink[3] -> BaseStation[0]; | 54 |
| Sink[4] -> BaseStation[0]; | 55 |
| Sink[5] -> BaseStation[0]; | 56 |
| Sink[6] -> BaseStation[0]; | 57 |
| Sink[7] -> BaseStation[0]; | 58 |
| Sink[8] -> BaseStation[0]; | 59 |
| Sink[9] -> BaseStation[0]; | 60 |
| } | 61 |
| } % | 62 |
| 63 | |
| medium[mgnt] { | 64 |
| default_q = 1; | 65 |
| default_time = 0ms; | 66 |
| default_listening_current = 0mA; | 67 |
| default_sending_current = 0 mA; | 68 |
| default_receiving_current = 0 mA; | 69 |
| 70 | |
| topology { | 71 |
| Manager -> Sink[0:9]: time = 0 ms; | 72 |
| Manager <-> Sensor[0:79]; | 73 |
| Sink[0] <-> Sensor[0:7]; | 74 |
| Sink[1] <-> Sensor[8:15]; | 75 |
| Sink[2] <-> Sensor[16:23]; | 76 |
| Sink[3] <-> Sensor[24:31]; | 77 |
| Sink[4] <-> Sensor[32:39]; | 78 |
| Sink[5] <-> Sensor[40:47]; | 79 |
| Sink[6] <-> Sensor[48:55]; | 80 |
| Sink[7] <-> Sensor[56:63]; | 81 |
| Sink[8] <-> Sensor[64:71]; | 82 |
| Sink[9] <-> Sensor[72:79]; | 83 |
| } | 84 |
| } | 85 |
| } | 86 |
| } | 87 |
| } | 88 |
References
- Murphy, S.; Niebur, D. Real-time monitoring of transmission line thermal parameters: A literature review. In Proceedings of the 2018 IEEE Power Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 19–22 February 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Akpolat, A.N.; Nese, S.V.; Dursun, E. Towards to smart grid: Dynamic line rating. In Proceedings of the 2018 6th International Istanbul Smart Grids and Cities Congress and Fair (ICSG), Istanbul, Turkey, 25–26 April 2018; pp. 96–100. [Google Scholar] [CrossRef]
- Douglass, D.; Chisholm, W.; Davidson, G.; Grant, I.; Lindsey, K.; Lancaster, M.; Lawry, D.; McCarthy, T.; Nascimento, C.; Pasha, M.; et al. Real-Time Overhead Transmission-Line Monitoring for Dynamic Rating. IEEE Trans. Power Deliv. 2016, 31, 921–927. [Google Scholar] [CrossRef]
- Moldoveanu, C.; Rusu, A.; Florea, M.; Vaju, M.; Hategan, I.; Iacobici, L.; Balta, N.; Zaharescu, S.; Avramescu, M.; Curiac, P.; et al. OHLM: Integrated solution for real-time monitoring of overhead transmission lines. In Proceedings of the 2016 IEEE PES 13th International Conference on Transmission Distribution Construction, Operation Live-Line Maintenance (ESMO), Columbus, OH, USA, 12–15 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Aznarte, J.L.; Siebert, N. Dynamic Line Rating Using Numerical Weather Predictions and Machine Learning: A Case Study. IEEE Trans. Power Deliv. 2017, 32, 335–343. [Google Scholar] [CrossRef]
- Bhattarai, B.P.; Gentle, J.P.; McJunkin, T.; Hill, P.J.; Myers, K.; Abboud, A.; Renwick, R.; Hengst, D. Improvement of Transmission Line Ampacity Utilization by Weather-Based Dynamic Line Ratings. IEEE Trans. Power Deliv. 2018, 33, 1853–1863. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, F.; Zhong, L. Intelligent on-line monitoring system based on elastic wave for overhead transmission lines. In Proceedings of the 2013 IEEE International Conference on Information and Automation (ICIA), Yinchuan, China, 26–28 August 2013; pp. 115–118. [Google Scholar] [CrossRef]
- Wydra, M.; Kacejko, P. Power system state estimation using wire temperature measurements for model accuracy enhancement. In Proceedings of the 2016 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Ljubljana, Slovenia, 9–12 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Wydra, M.; Kacejko, P. Power System State Estimation Accuracy Enhancement Using Temperature Measurements of Overhead Line Conductors. Metrol. Meas. Syst. 2016, 23, 183–192. [Google Scholar] [CrossRef]
- Wydra, M.; Kacejko, P.; Gastolek, P. The Impact of the Power Line Conductors Temperature on the Optimal Solution of Generation Distribution in the Power System. In Proceedings of the 2018 15th International Conference on the European Energy Market (EEM), Lodz, Poland, 27–29 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Kacejko, P.; Wydra, M.; Nowak, W.; Szpyra, W. Advantages, Benefits, and Effectiveness Resulting from the Application of the Dynamic Management of Transmission Line Capacities. In Proceedings of the 2018 15th International Conference on the European Energy Market (EEM), Lodz, Poland, 27–29 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Esfahani, M.M.; Yousefi, G.R. Real Time Congestion Management in Power Systems Considering Quasi-Dynamic Thermal Rating and Congestion Clearing Time. IEEE Trans. Ind. Inform. 2016, 12, 745–754. [Google Scholar] [CrossRef]
- Lovrenčić, V.; Gabrovšek, M.; Kovač, M.; Gubeljak, N.; Šojat, Z.; Klobas, Z. The Contribution of Conductor Temperature and Sag Monitoring to Increased Ampacities of Overhead Lines (OHLs). Period. Polytech. Electr. Eng. Comput. Sci. 2015, 59, 70–77. [Google Scholar] [CrossRef]
- de Nazare, F.V.B.; Werneck, M.M. Hybrid Optoelectronic Sensor for Current and Temperature Monitoring in Overhead Transmission Lines. IEEE Sens. J. 2012, 12, 1193–1194. [Google Scholar] [CrossRef]
- Wydra, M.; Kisala, P.; Harasim, D.; Kacejko, P. Overhead Transmission Line Sag Estimation Using a Simple Optomechanical System with Chirped Fiber Bragg Gratings. Part 1: Preliminary Measurements. Sensors 2018, 18, 309. [Google Scholar] [CrossRef]
- Ma, G.M.; Li, C.R.; Quan, J.T.; Jiang, J.; Cheng, Y.C. A Fiber Bragg Grating Tension and Tilt Sensor Applied to Icing Monitoring on Overhead Transmission Lines. IEEE Trans. Power Deliv. 2011, 26, 2163–2170. [Google Scholar] [CrossRef]
- Gubeljak, N.; Banić, B.; Lovrenčić, V.; Kovač, M.; Nikolovski, S. Preventing Transmission Line damage caused by ice with smart on-line conductor Monitoring. In Proceedings of the 2016 International Conference on Smart Systems and Technologies (SST), Osijek, Croatia, 12–14 October 2016; pp. 155–163. [Google Scholar] [CrossRef]
- Mazur, K.; Wydra, M.; Ksiezopolski, B. Secure and Time-Aware Communication of Wireless Sensors Monitoring Overhead Transmission Lines. Sensors 2017, 17, 1610. [Google Scholar] [CrossRef]
- Hung, K.S.; Lee, W.K.; Li, V.O.K.; Lui, K.S.; Pong, P.W.T.; Wong, K.K.Y.; Yang, G.H.; Zhong, J. On Wireless Sensors Communication for Overhead Transmission Line Monitoring in Power Delivery Systems. In Proceedings of the 2010 First IEEE International Conference on Smart Grid Communications, Gaithersburg, MD, USA, 4–6 October 2010; pp. 309–314. [Google Scholar] [CrossRef]
- Khawaja, A.H.; Huang, Q.; Khan, Z.H. Monitoring of Overhead Transmission Lines: A Review from the Perspective of Contactless Technologies. Sens. Imaging 2017, 18, 24. [Google Scholar] [CrossRef]
- Sun, X.; Huang, Q.; Hou, Y.; Jiang, L.; Pong, P.W.T. Noncontact Operation-State Monitoring Technology Based on Magnetic-Field Sensing for Overhead High-Voltage Transmission Lines. IEEE Trans. Power Deliv. 2013, 28, 2145–2153. [Google Scholar] [CrossRef]
- Nie, S.; Qu, G.; Ye, H.; Jiang, X. On-line monitoring system for icing state of overhead transmission line. In Proceedings of the 2012 Power Engineering and Automation Conference, Wuhan, China, 18–20 September 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Phillips, A. Evaluation of Instrumentation and Dynamic Thermal Ratings for Overhead Lines; USDOE/EPRI/NYPA Technical Report; New York Power Authority: White Plains, NY, USA, 2013; Volume 1. [Google Scholar] [CrossRef]
- Cho, C.J.; Ko, H. Video-Based Dynamic Stagger Measurement of Railway Overhead Power Lines Using Rotation-Invariant Feature Matching. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1294–1304. [Google Scholar] [CrossRef]
- Wu, Y.C.; Cheung, L.F.; Lui, K.S.; Pong, P.W.T. Efficient Communication of Sensors Monitoring Overhead Transmission Lines. IEEE Trans. Smart Grid 2012, 3, 1130–1136. [Google Scholar] [CrossRef]
- Fateh, B.; Govindarasu, M.; Ajjarapu, V. Wireless Network Design for Transmission Line Monitoring in Smart Grid. IEEE Trans. Smart Grid 2013, 4, 1076–1086. [Google Scholar] [CrossRef]
- Li, M.; Chi, X.B.; Jia, X.C.; Zhang, J.L. WSN-based efficient monitoring for overhead transmission line in smart grid. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 8485–8489. [Google Scholar] [CrossRef]
- Choi, C.; Jeong, J.; Lee, I.; Park, W. LoRa based renewable energy monitoring system with open IoT platform. In Proceedings of the 2018 International Conference on Electronics, Information, and Communication (ICEIC), Honolulu, HI, USA, 24–27 January 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Mateev, V.; Marinova, I. Distributed Internet of Things System for Wireless Monitoring of Electrical Grids. In Proceedings of the 2018 20th International Symposium on Electrical Apparatus and Technologies (SIELA), Bourgas, Bulgaria, 3–6 June 2018; pp. 1–3. [Google Scholar] [CrossRef]
- Chen, G.; Zhang, X.; Wang, Q.; Dai, F.; Gong, Y.; Zhu, K. Symmetrical Dense-Shortcut Deep Fully Convolutional Networks for Semantic Segmentation of Very-High-Resolution Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1633–1644. [Google Scholar] [CrossRef]
- Sun, W.; Wang, R. Fully Convolutional Networks for Semantic Segmentation of Very High Resolution Remotely Sensed Images Combined With DSM. IEEE Geosci. Remote Sens. Lett. 2018, 15, 474–478. [Google Scholar] [CrossRef]
- Mou, L.; Zhu, X.X. Vehicle Instance Segmentation From Aerial Image and Video Using a Multitask Learning Residual Fully Convolutional Network. IEEE Trans. Geosci. Remote Sens. 2018, 1–13. [Google Scholar] [CrossRef]
- Grigsby, L. The Electric Power Engineering Handbook: Power Systems, 3rd ed.; Five Volume Set; CRC Press: Boca Raton, FL, USA, 2013; pp. 5–25. [Google Scholar]
- Ramachandran, P.; Vittal, V.; Heydt, G.T. Mechanical State Estimation for Overhead Transmission Lines with Level Spans. IEEE Trans. Power Syst. 2008, 23, 908–915. [Google Scholar] [CrossRef]
- Conductor Working Group P738. IEEE 738-2012 Standard for Calculating the Current-Temperature Relationship of Bare Overhead Conductors—Corrigendum 1; IEEE Standards Association: Piscataway, NJ, USA, 2013; pp. 1–10. [Google Scholar]
- CIGRE Working Group 22.12. Thermal Behaviour of Overhead Conductors; CIGRE- International Council on Large Electric Systems, 21 RUE D’ARTOIS: Paris, France, 2002. [Google Scholar]
- MATLAB. MATLAB Version: 9.4.0.813654 (R2018a); The MathWorks Inc.: Natick, MA, USA, 2018. [Google Scholar]
- MATLAB. Image Processing Toolbox, Version 10.2 (R2018a); The MathWorks Inc.: Natick, MA, USA, 2018. [Google Scholar]
- Zanabria, C.; Andrén, F.; Leimgruber, F.; Bründlinger, R.; Strasser, T. A low cost open source-based IEC 61850/61499 automation platform for distributed energy resources. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- MATLAB. Matlab/Simulik Hardware Support Package for Raspberry Pi. 2018. Available online: https://www.mathworks.com/hardware-support/raspberry-pi-simulink.html (accessed on 19 July 2018).
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T.; The Scikit-Image Contributors. The scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Terashmila, L.K.A.; Iqbal, T.; Mann, G. A comparison of low cost wireless communication methods for remote control of grid-tied converters. In Proceedings of the 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Kim, D.H.; Park, J.B.; Shin, J.H.; Kim, J.D. Design and implementation of object tracking system based on LoRa. In Proceedings of the 2017 International Conference on Information Networking (ICOIN), Da Nang, Vietnam, 11–13 January 2017; pp. 463–467. [Google Scholar] [CrossRef]
- Li, Y.; Yan, X.; Zeng, L.; Wu, H. Research on water meter reading system based on LoRa communication. In Proceedings of the 2017 IEEE International Conference on Smart Grid and Smart Cities (ICSGSC), Singapore, 23–26 July 2017; pp. 248–251. [Google Scholar] [CrossRef]
- Jovalekic, N.; Drndarevic, V.; Darby, I.; Zennaro, M.; Pietrosemoli, E.; Ricciato, F. LoRa Transceiver with Improved Characteristics. IEEE Wirel. Commun. Lett. 2018, 7, 1058–1061. [Google Scholar] [CrossRef]
- Lavric, A.; Popa, V. Internet of Things and LoRa™ low-power wide-area networks challenges. In Proceedings of the 2017 9th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Targoviste, Romania, 29 June–1 July 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Lee, H.; Ke, K. Monitoring of Large-Area IoT Sensors Using a LoRa Wireless Mesh Network System: Design and Evaluation. IEEE Trans. Instrum. Meas. 2018, 67, 2177–2187. [Google Scholar] [CrossRef]
- Aras, E.; Ramachandran, G.S.; Lawrence, P.; Hughes, D. Exploring the Security Vulnerabilities of LoRa. In Proceedings of the 2017 3rd IEEE International Conference on Cybernetics (CYBCONF), Exeter, UK, 21–23 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Cheng, Y.; Saputra, H.; Goh, L.M.; Wu, Y. Secure smart metering based on LoRa technology. In Proceedings of the 2018 IEEE 4th International Conference on Identity, Security, and Behavior Analysis (ISBA), Singapore, 11–12 January 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Lavric, A.; Popa, V. Internet of Things and LoRa™ Low-Power Wide-Area Networks: A survey. In Proceedings of the 2017 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 13–14 July 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Pycom. The Official Pycom Documentation. 2018. Available online: https://docs.pycom.io/ (accessed on 6 November 2018).
- Ksiezopolski, B. QoP-ML: Quality of protection modelling language for cryptographic protocols. Comput. Secur. 2012, 31, 569–596. [Google Scholar] [CrossRef]
- Mazur, K.; Ksiezopolski, B. Comparison and Assessment of Security Modeling Approaches in Terms of the QoP-ML. In Cryptography and Security Systems; Kotulski, Z., Księżopolski, B., Mazur, K., Eds.; Springer: Berlin/Heidelberg, UK, 2014; pp. 178–192. [Google Scholar]
- Rusinek, D.; Ksiezopolski, B.; Wierzbicki, A. AQoPA: Automated Quality of Protection Analysis Framework for Complex Systems. In Computer Information Systems and Industrial Management; Saeed, K., Homenda, W., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 475–486. [Google Scholar]
- QoP-ML. The Official Web Page of the QoP-ML Project. 2018. Available online: http://www.qopml.org/wp-content/uploads/AQoPA/Models/transmission_line_monitoring.zip (accessed on 18 January 2019).











| Region | TX | SF | BW | CR |
|---|---|---|---|---|
| dBm | - | kHz | - | |
| EU868 | 14 | 12 | 125 | 4/8 |
| State | Tension | Strain | Sag | Temperature |
|---|---|---|---|---|
| H (kN) | (MPa) | (m) | C | |
| 1 | 3.650 | 13.215 | 0.8152 | 7.51 |
| 2 | 2.996 | 10.848 | 0.9932 | 27.54 |
| Min | Max | Mean | Median | Mode | Std | Std. % |
|---|---|---|---|---|---|---|
| 22.5091 | 22.8085 | 22.5480 | 22.5342 | 22.5091 | 0.0433 | 0.1920 |
| Min | Max | Mean | Median | Mode | Std |
|---|---|---|---|---|---|
| −6.878 | 6.406 | 0.06157 | 0.0298 | −6.878 | 1.803 |
| Min | Max | Mean | Median | Mode | Std |
|---|---|---|---|---|---|
| −7.191 | 6.532 | 0.04932 | 0.02974 | −7.191 | 1.891 |
| Communication | Time (s) | Communication | Time (s) | Communicationf | Time (s) | Communication | Time (s) |
|---|---|---|---|---|---|---|---|
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink | ||||
| node -> Sink | node -> Sink | node -> Sink | node -> Sink |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wydra, M.; Kubaczynski, P.; Mazur, K.; Ksiezopolski, B. Time-Aware Monitoring of Overhead Transmission Line Sag and Temperature with LoRa Communication. Energies 2019, 12, 505. https://doi.org/10.3390/en12030505
Wydra M, Kubaczynski P, Mazur K, Ksiezopolski B. Time-Aware Monitoring of Overhead Transmission Line Sag and Temperature with LoRa Communication. Energies. 2019; 12(3):505. https://doi.org/10.3390/en12030505
Chicago/Turabian StyleWydra, Michal, Pawel Kubaczynski, Katarzyna Mazur, and Bogdan Ksiezopolski. 2019. "Time-Aware Monitoring of Overhead Transmission Line Sag and Temperature with LoRa Communication" Energies 12, no. 3: 505. https://doi.org/10.3390/en12030505
APA StyleWydra, M., Kubaczynski, P., Mazur, K., & Ksiezopolski, B. (2019). Time-Aware Monitoring of Overhead Transmission Line Sag and Temperature with LoRa Communication. Energies, 12(3), 505. https://doi.org/10.3390/en12030505