Assessment of Maximum Penetration Capacity of Photovoltaic Generator Considering Frequency Stability in Practical Stand-Alone Microgrid




Abstract
:1. Introduction
- The maximum penetration capacity of PV is evaluated to satisfy the frequency stability of a stand-alone microgrid;
- A new dynamic droop equation is derived by considering both the droop coefficient and reserve power of each generator instead of the droop coefficient for entire system;
- Case studies are carried out by using the practical data of stand-alone microgrid in South Korea.
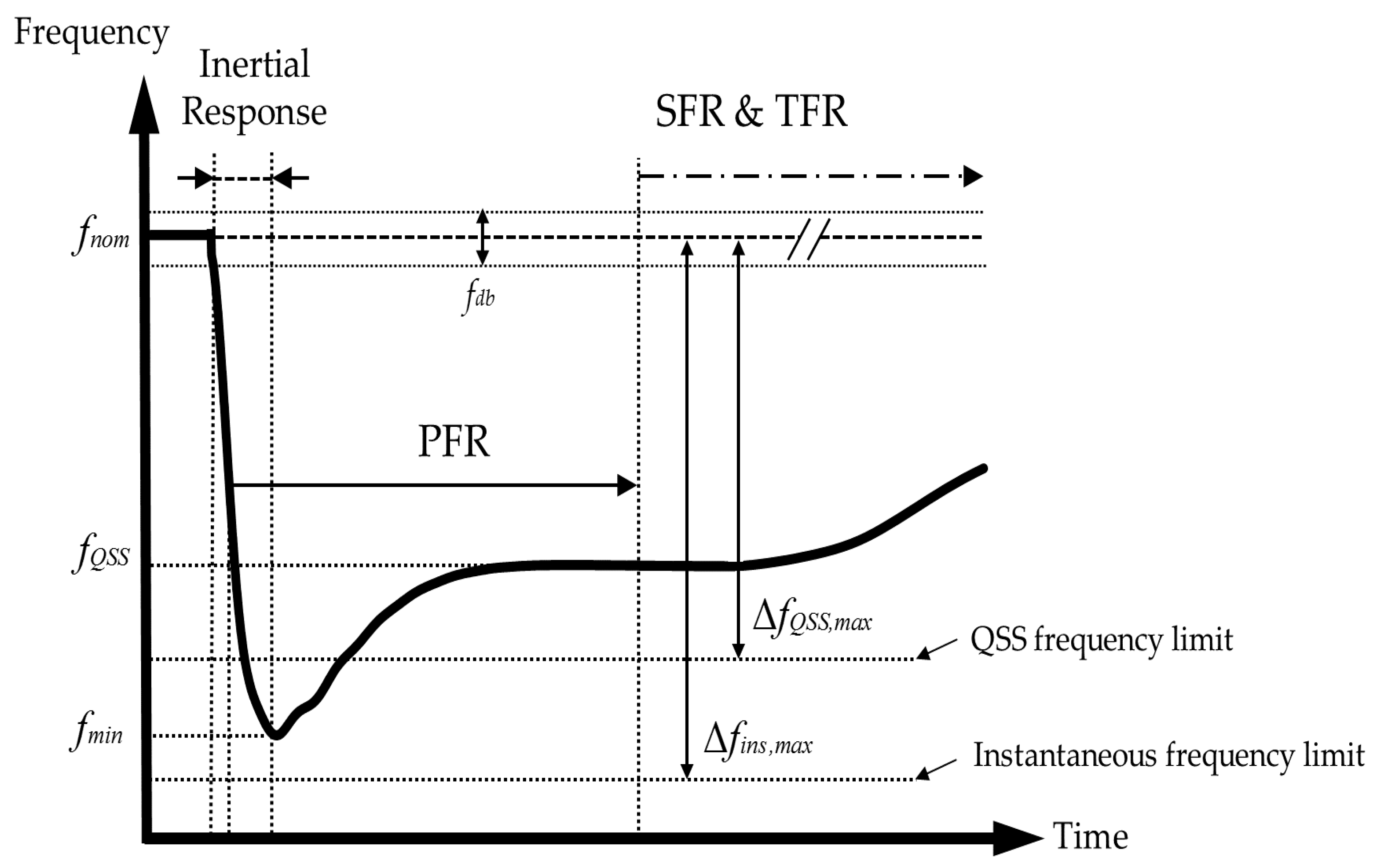
2. Frequency Response of Microgrid with High Renewable Penetration
2.1. Quasi-Steady-State Frequency
2.2. Instantaneous Frequency
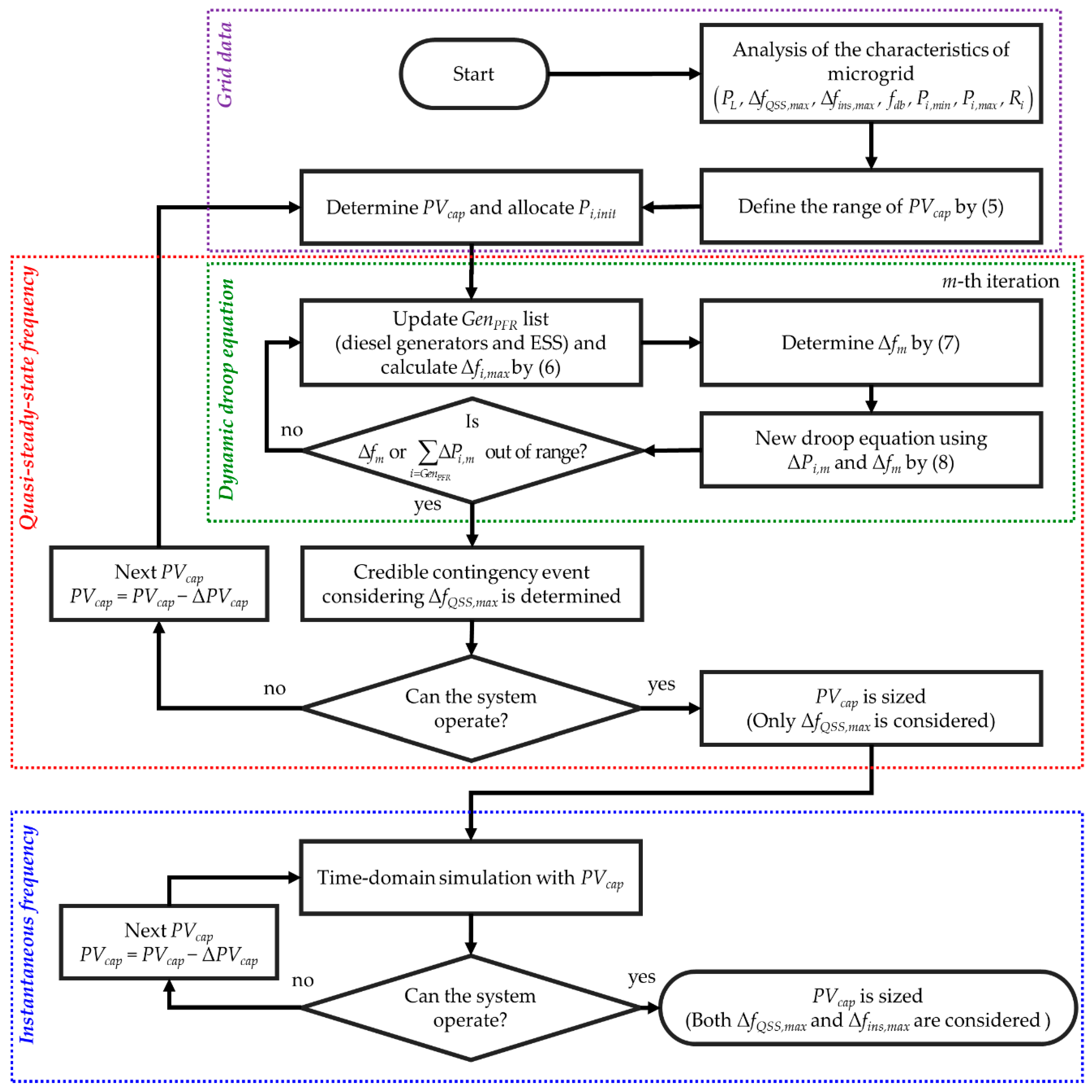
3. Evaluating Maximum Penetration Capacity of PV
3.1. Methodology
3.1.1. Analysis of Characteristics of Microgrid
3.1.2. Droop Equation Considering the Power Output Limit
3.1.3. Quasi-Steady-State Frequency Viewpoint
3.1.4. Instantaneous Frequency Viewpoint
4. System Model of Microgrid
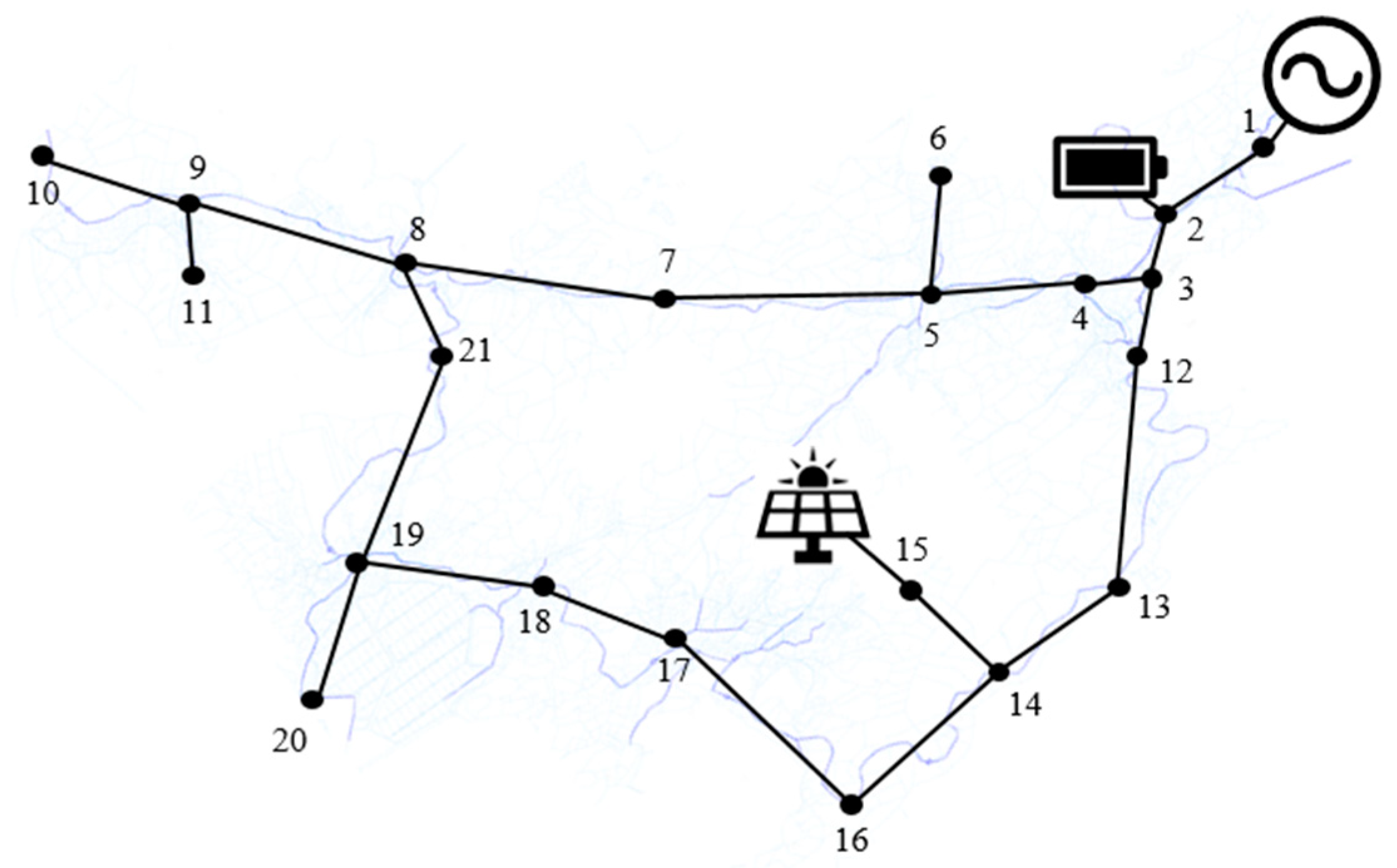
4.1. Practical Microgrid System in South Korea
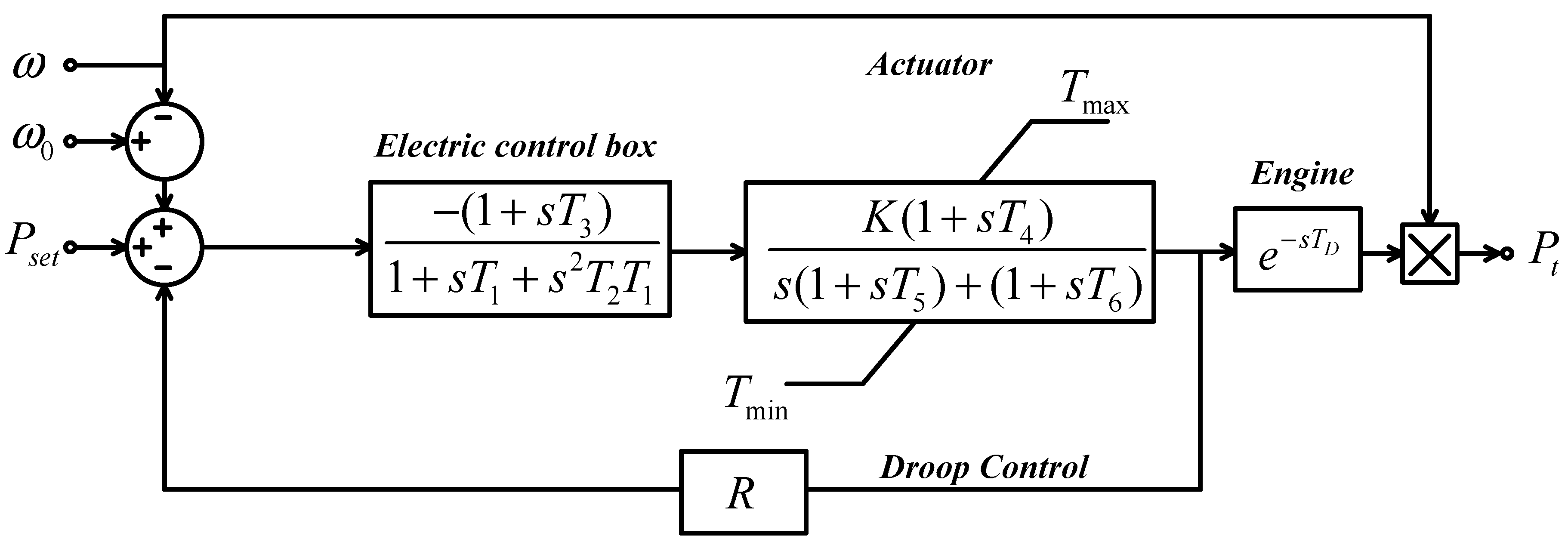
4.1.1. Diesel Generator
4.1.2. Photovoltaic Generator
- The PV used the maximum power point tracking (MPPT) control method to maximize its efficiency and power generation.
- For the microgrid with a high penetration level of PV generator, the worst contingency event will be a sudden change in solar irradiation, which causes the power output from the PV generator to reduce to zero. Such an event might occur frequently because the PV generators in this microgrid are concentrated within a small area.
4.1.3. Energy Storage System
- The ESS supplied the active power to the grid when the required power generation decreased below the load demand. In contrast, the ESS was charged when the power generation exceeded the load demand or when the state of charge (SOC) was substantially insufficient. Therefore, the ESS was in a standby state with the output of zero under normal conditions.
- The ESS increased the reserve power of system, which was used for the credible contingency event with a greater magnitude.
- The droop coefficient of ESS was set to be lower than that of the diesel generators. That is, the value was set to 1%.
5. Simulations and Results
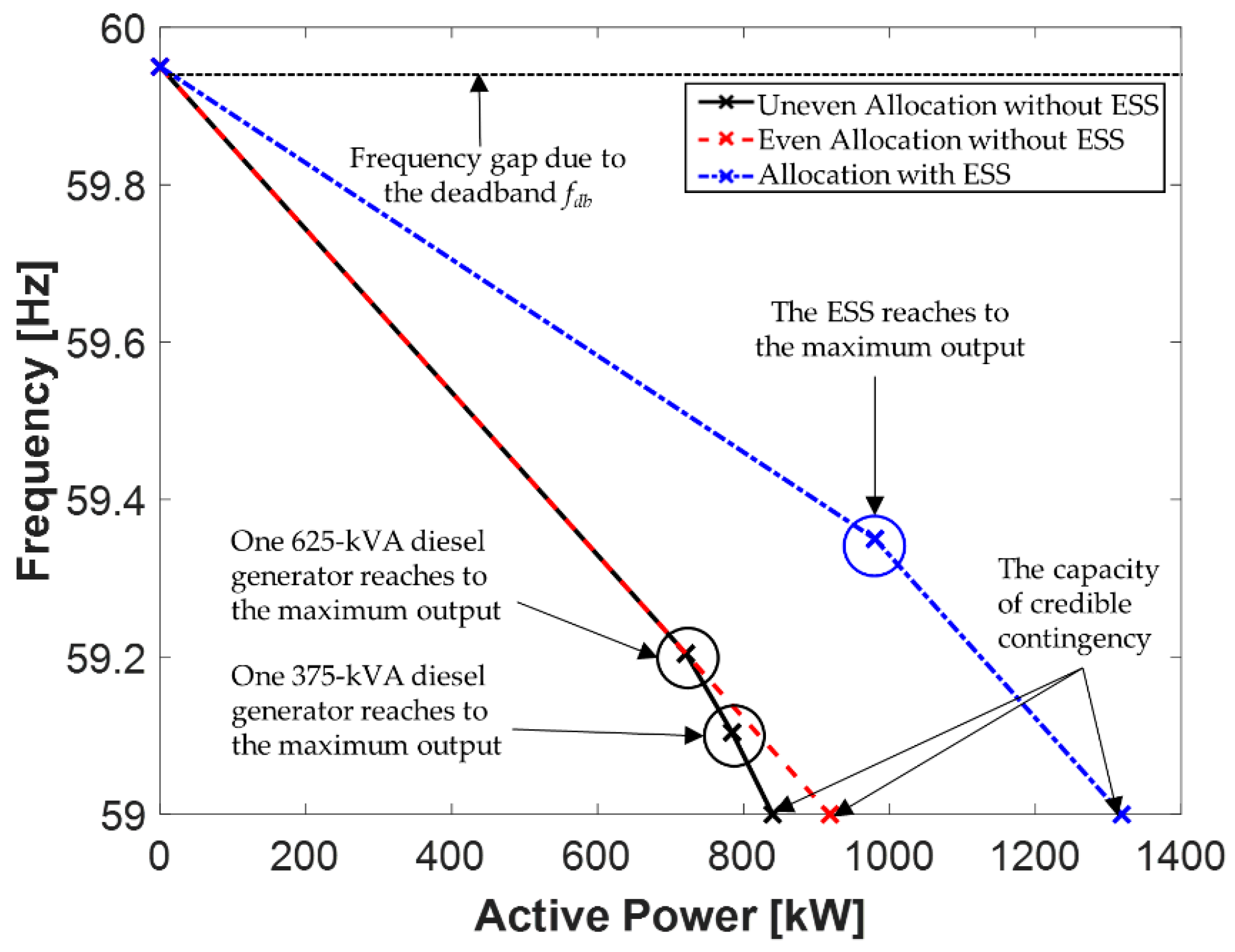
5.1. Analytical Results
5.2. Dynamical Simulation Results
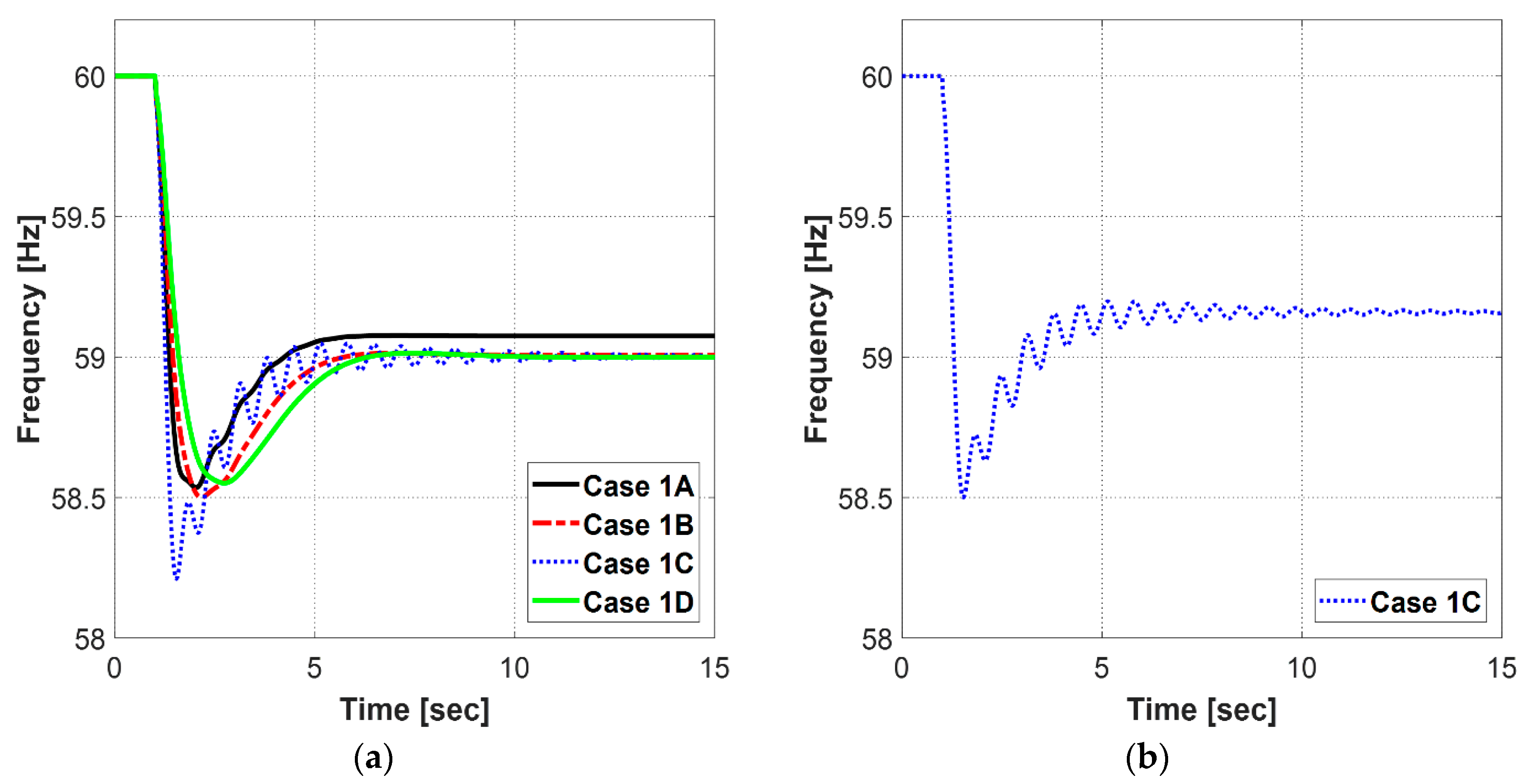
5.2.1. Frequency Responses without ESS
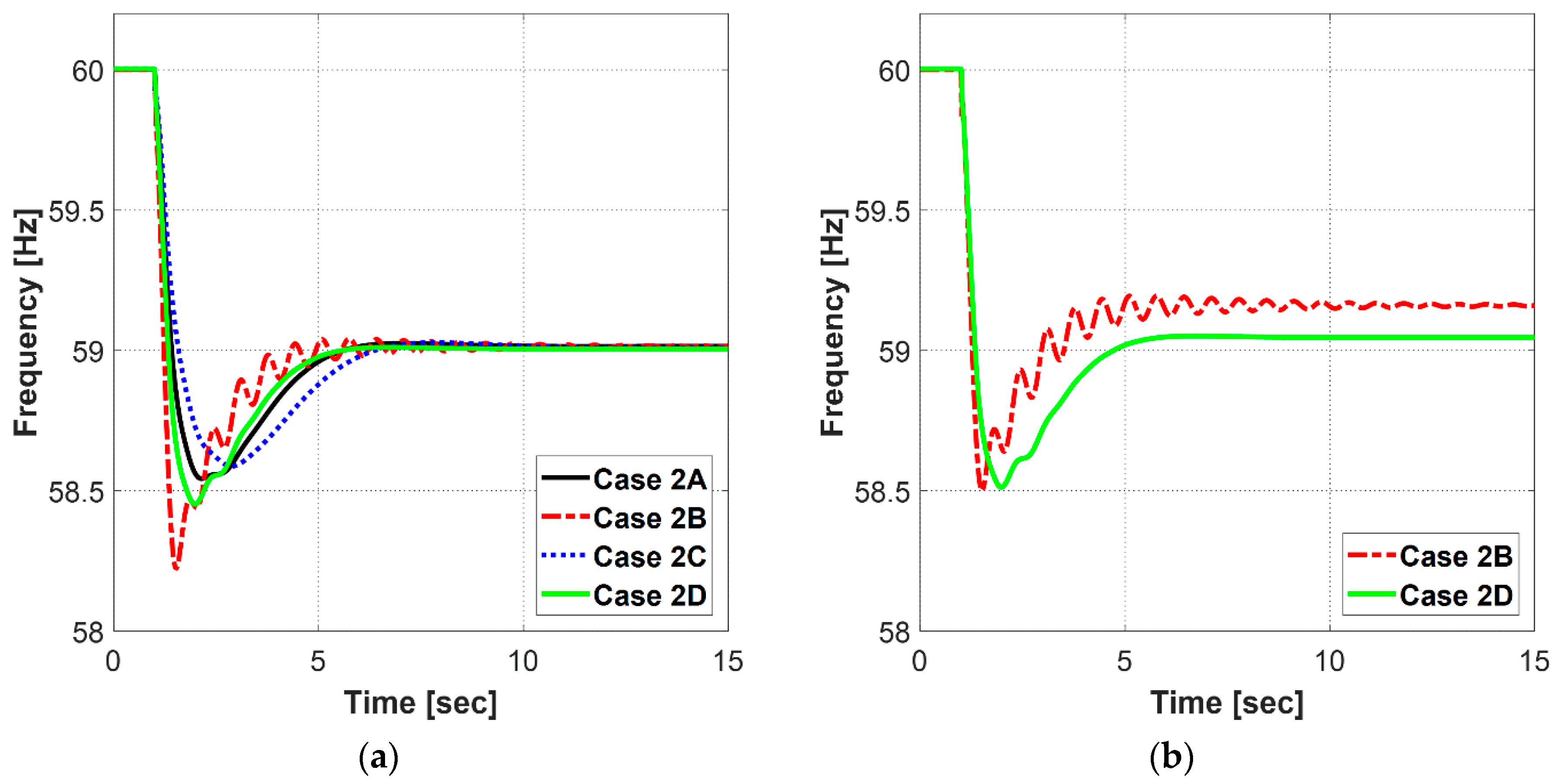
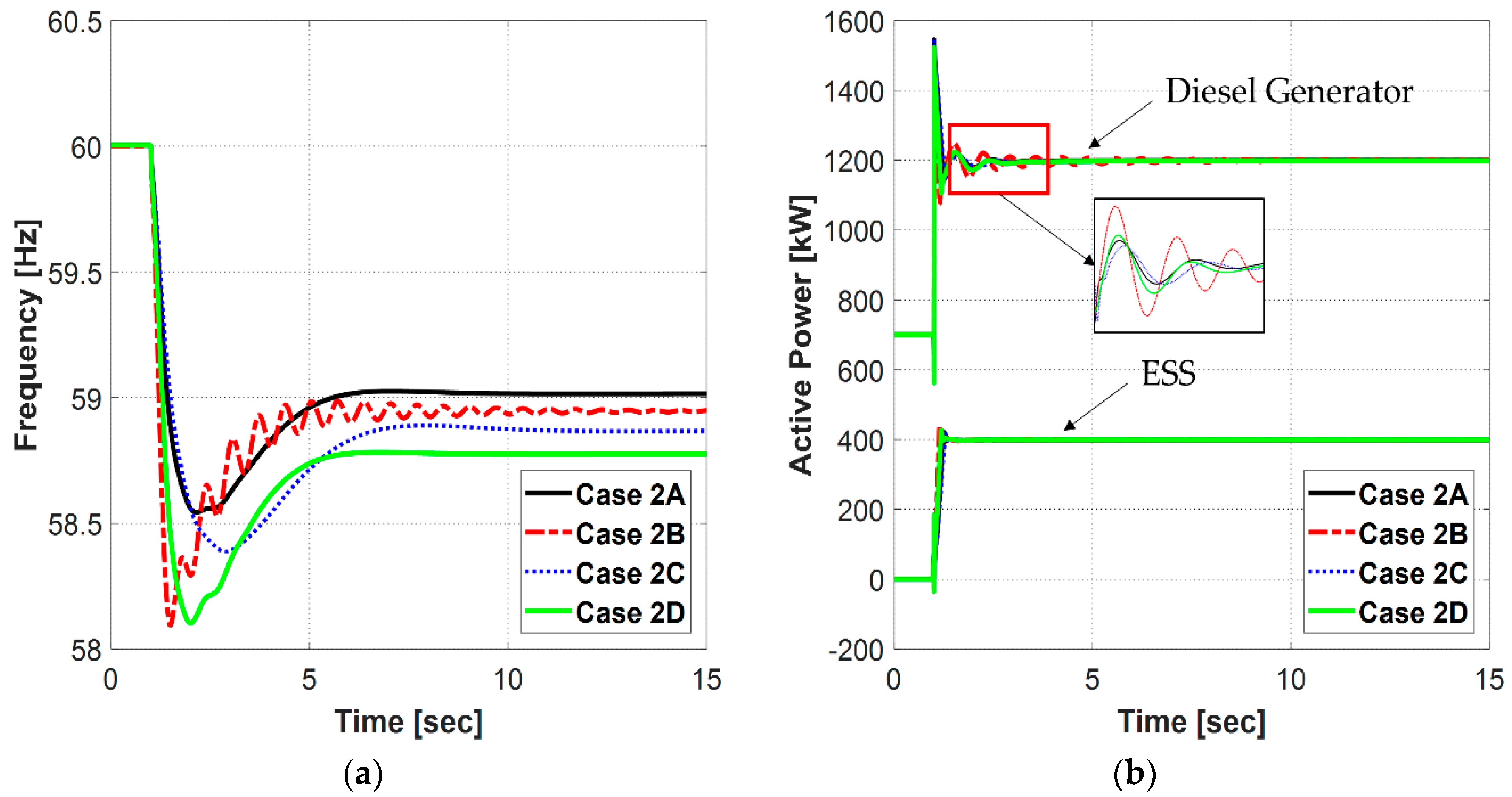
5.2.2. Frequency Responses with ESS
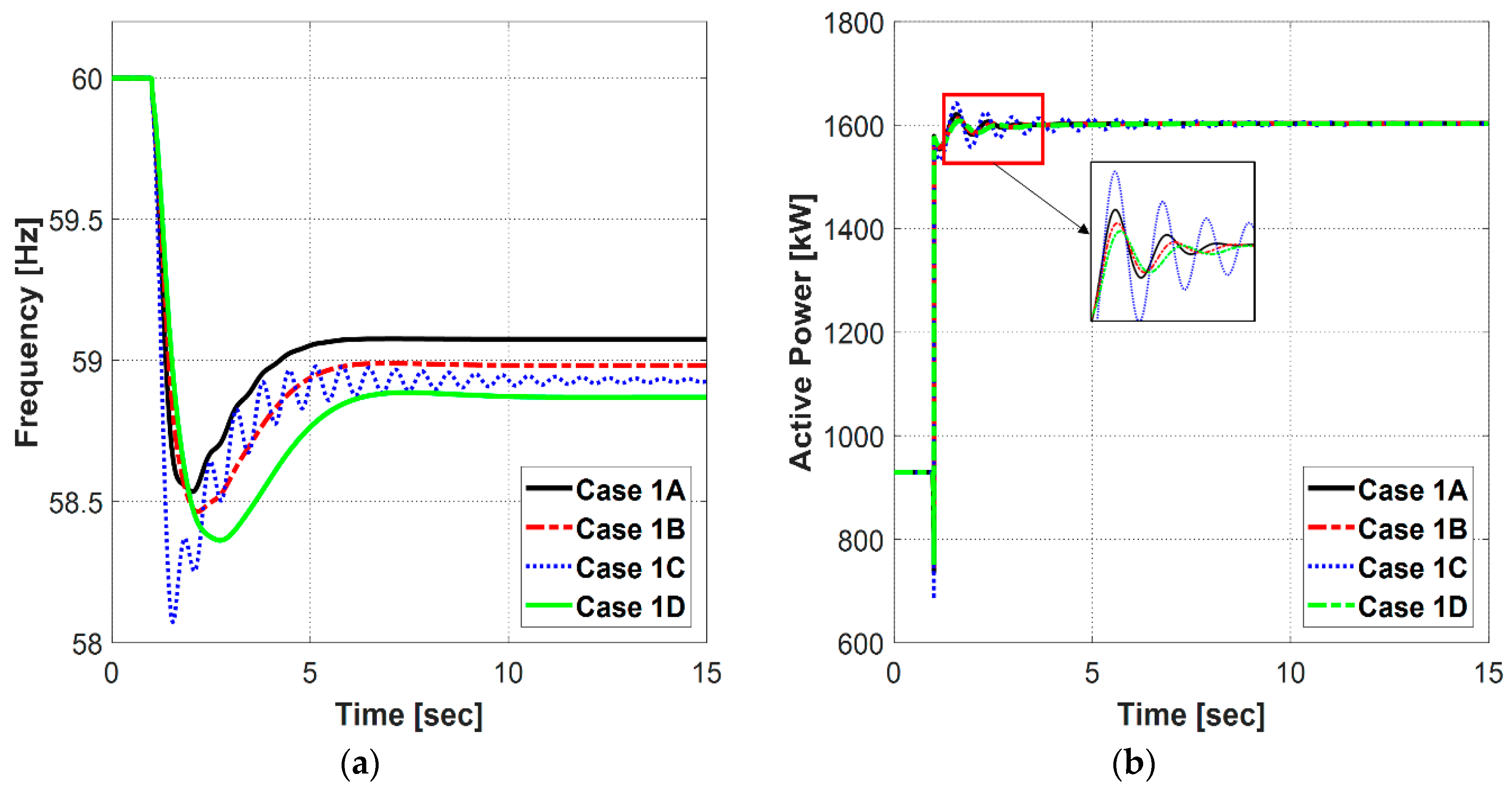
5.2.3. Maximum Capacity of PV for Entire Cases
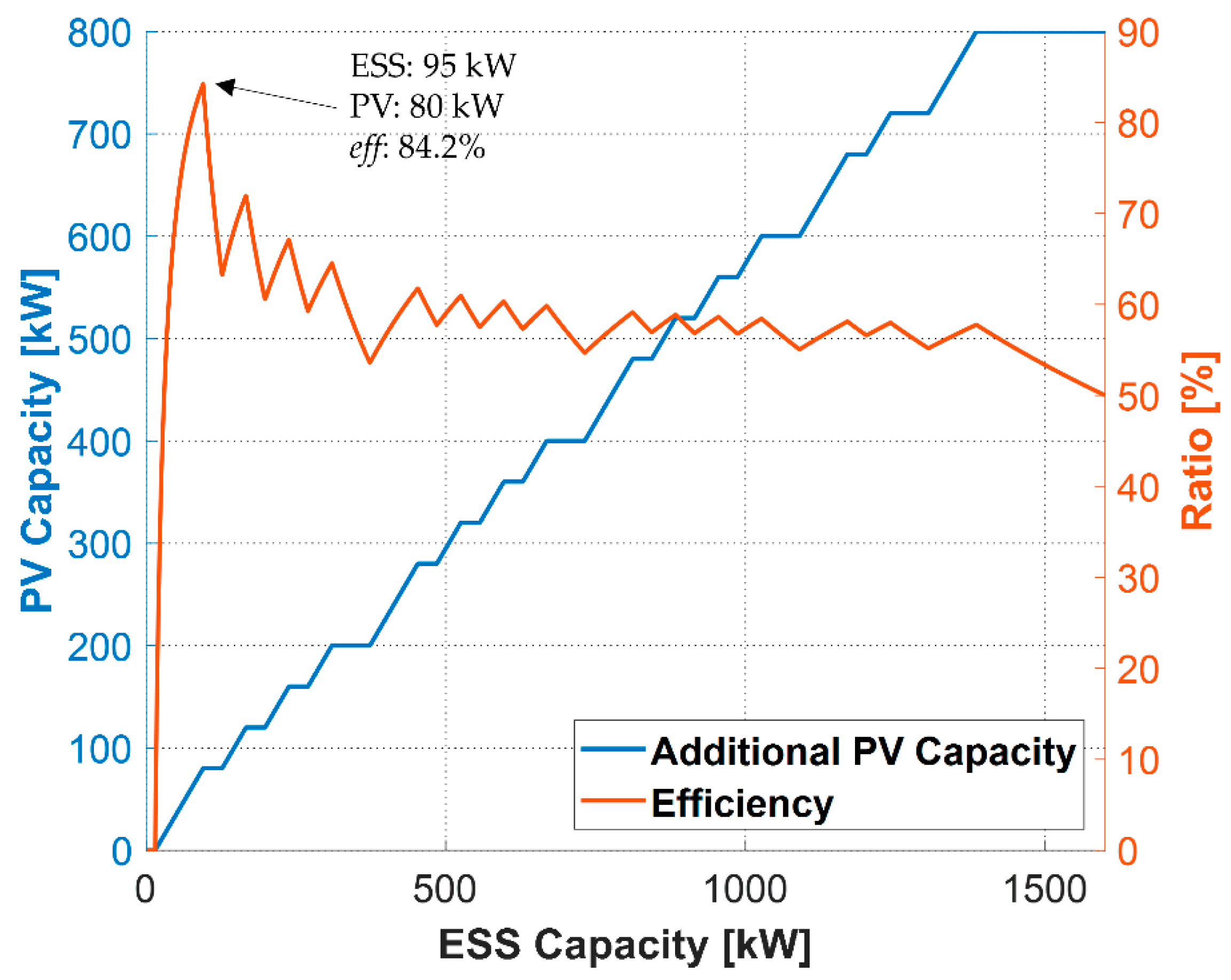
5.3. Relationship between PV and ESS
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, T.; O’Neill, D.; Kamath, H. Dynamic Control and Optimization of Distributed Energy Resources in a Microgrid. IEEE Trans. Smart Grid 2015, 6, 2884–2894. [Google Scholar] [CrossRef]
- Wu, D.; Tang, F.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. A Control Architecture to Coordinate Renewable Energy Sources and Energy Storage Systems in Islanded Microgrids. IEEE Trans. Smart Grid 2015, 6, 1156–1166. [Google Scholar] [CrossRef]
- Roposki, B.; Sen, P.K.; Malmedal, K. Optimum Sizing and Placement of Distributed and Renewable Energy Sources in Electric Power Distribution Systems. IEEE Trans. Ind. Appl. 2013, 49, 2741–2752. [Google Scholar] [CrossRef]
- Van de Vyver, J.; De Kooning, J.D.; Meersman, B.; Vandevelde, L.; Vandoorn, T.L. Droop Control as an Alternative Inertial Response Strategy for the Synthetic Inertia on Wind Turbines. IEEE Trans. Power Syst. 2016, 31, 1129–1138. [Google Scholar] [CrossRef]
- Zheng, L.; Hu, W.; Lu, Q.; Min, Y. Optimal Energy Storage System Allocation and Operation for Improving Wind Power Penetration. IET Gener. Transm. Distrib. 2015, 9, 2672–2678. [Google Scholar] [CrossRef]
- Kim, J.; Lee, S.H.; Park, J. Inertia-Free Stand-Alone Microgrid—Part II: Inertia Control for Stabilizing DC-Link Capacitor Voltage of PMSG Wind Turbine System. IEEE Trans. Ind. Appl. 2018, 54, 4060–4068. [Google Scholar] [CrossRef]
- Miao, L.; Wen, J.; Xie, H.; Yue, C.; Lee, W. Coordinated Control Strategy of Wind Turbine Generator and Energy Storage Equipment for Frequency Support. IEEE Trans. Ind. Appl. 2015, 51, 2732–2742. [Google Scholar] [CrossRef]
- Teng, J.-H.; Luan, S.-W.; Lee, D.-J.; Huang, Y.-Q. Optimal Charging/Discharging Scheduling of Battery Storage Systems for Distribution Systems Interconnected with Sizeable PV Generation Systems. IEEE Trans. Power Syst. 2013, 28, 1425–1433. [Google Scholar] [CrossRef]
- Venkataraman, S.; Ziesler, C.; Johnson, P.; Kempen, S.V. Integrated Wind, Solar, and Energy Storage: Designing Plants with a Better Generation Profile and Lower Overall Cost. IEEE Power Energy Mag. 2018, 16, 74–83. [Google Scholar] [CrossRef]
- Knap, V.; Chaudhary, S.K.; Stroe, D.; Swierczynski, M.; Craciun, B.; Teodorescu, R. Sizing of an Energy Storage System for Grid Inertial Response and Primary Frequency Reserve. IEEE Trans. Power Syst. 2016, 31, 3447–3456. [Google Scholar] [CrossRef]
- Majumder, R.; Chaudhuri, B.; Ghosh, A.; Majumder, R.; Ledwich, G.; Zare, F. Improvement of Stability and Load Sharing in an Autonomous Microgrid Using Supplementary Droop Control Loop. IEEE Trans. Power Syst. 2010, 25, 796–808. [Google Scholar] [CrossRef]
- Zhang, F.; Meng, K.; Xu, Z.; Dong, Z.; Zhang, L.; Wan, C.; Liang, J. Battery ESS Planning for Wind Smoothing via Variable-Interval Reference Modulation and Self-Adaptive SOC Control Strategy. IEEE Trans. Sustain. Energy 2017, 8, 695–707. [Google Scholar] [CrossRef]
- Liu, Y.; Du, W.; Xiao, L.; Wang, H.; Cao, J. A Method for Sizing Energy Storage System to Increase Wind Penetration as Limited by Grid Frequency Deviations. IEEE Trans. Power Syst. 2016, 31, 729–737. [Google Scholar] [CrossRef]
- Wang, X.; Yue, M.; Muljadi, E.; Gao, W. Probabilistic Approach for Power Capacity Specification of Wind Energy Storage Systems. IEEE Trans. Ind. Appl. 2014, 50, 1215–1224. [Google Scholar] [CrossRef]
- Sun, C.; Liu, D.; Wang, Y.; You, Y. Assessment of Credible Capacity for Intermittent Distributed Energy Resources in Active Distribution Network. Energies 2017, 10, 1104. [Google Scholar] [CrossRef]
- NERC Reliability Guideline—Primary Frequency Control. 2015. Available online: https://www.nerc.com/comm/OC/Reliability Guideline DL/Primary_Frequency_Control_final.pdf (accessed on 28 January 2019).
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; Vicuna, L.G.d.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Turbine-Governor Models Standard Dynamic Turbine-Governor Systems in NEPLAN Power System Analysis Tool. 2015. Available online: https://www.neplan.ch/wp-content/uploads/2015/08/Nep_TURBINES_GOV.pdf (accessed on 22 March 2019).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | |
|---|---|
| Diesel generators | 375-kVA × 3, 625-kVA × 4 |
| Line impedance | 0.8991 + j0.4558 Ω/km |
| Nominal voltage | 6.9 kV |
| Nominal frequency | 60 Hz |
| Total load demands | 1600 kW |
| Bus No. | Load | Bus No. | Load | Bus No. | Load | |||
|---|---|---|---|---|---|---|---|---|
| P (kW) | Q (kVAR) | P (kW) | Q (kVAR) | P (kW) | Q (kVAR) | |||
| 1 | 0 | 0 | 8 | 8.65 | 0.87 | 15 | 0 | 0 |
| 2 | 0 | 0 | 9 | 141.24 | 14.12 | 16 | 37.47 | 3.75 |
| 3 | 111.83 | 11.183 | 10 | 291.12 | 29.11 | 17 | 144.12 | 14.41 |
| 4 | 145.56 | 14.56 | 11 | 193.12 | 19.31 | 18 | 75.81 | 7.58 |
| 5 | 41.16 | 4.12 | 12 | 136.91 | 13.69 | 19 | 11.53 | 1.15 |
| 6 | 7.84 | 0.78 | 13 | 25.94 | 2.59 | 20 | 25.94 | 2.59 |
| 7 | 34.59 | 3.46 | 14 | 37.47 | 3.75 | 21 | 129.70 | 12.97 |
| Parameters | 375-kVA Model | 625-kVA Model |
|---|---|---|
| Nominal voltage | 6.6 kV | 6.6 kV |
| Power factor | 0.8 | 0.8 |
| Inertia constant H | 6.0 s | 1.3007 s |
| Maximum active power Pmax | 300 kW | 500 kW |
| Minimum active power Pmin | 120 kW | 200 kW |
| K | T1 | T2 | T3 | T4 | T5 | T6 | Te | Td | R | Tmin | Tmax |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 15 | 0.2 | 0.1 | 0.5 | 1 | 0.1 | 0.2 | 0.1 | 0.01 | 0.05 | 0 | 1.1 |
| Numbers of Operating Diesel Generators | PVcap Range (kW) | Credible Contingency Event (kW) | Maximum PVcap (kW) | Case Study | |
|---|---|---|---|---|---|
| 375-kVA | 625-kVA | ||||
| 3 | 4 | PVcap ≤ 440 | 918.3 | 440 | |
| 3 | 3 | PVcap ≤ 640 | 760 | 640 | |
| 3 | 2 | PVcap ≤ 840 | 601.6 | 601 | 1D |
| 3 | 1 | 200 < PVcap ≤ 1040 | 433.3 | 433 | |
| 3 | 0 | 700 < PVcap ≤ 1240 | 285 | Unable | |
| 2 | 4 | PVcap ≤ 560 | 823.3 | 560 | |
| 2 | 3 | PVcap ≤ 760 | 665 | 665 | 1B |
| 2 | 2 | PVcap ≤ 960 | 506.6 | 506 | |
| 2 | 1 | 500 < PVcap ≤ 1160 | 348.3 | Unable | |
| 2 | 0 | 1000 < PVcap ≤ 1360 | 190 | Unable | |
| 1 | 4 | PVcap ≤ 680 | 728.3 | 680 | 1A |
| 1 | 3 | PVcap ≤ 880 | 570 | 570 | |
| 1 | 2 | 300 < PVcap ≤ 1080 | 411.6 | 411 | |
| 1 | 1 | 800 < PVcap ≤ 1280 | 253.3 | Unable | |
| 1 | 0 | 1300 < PVcap ≤ 1480 | 95 | Unable | |
| 0 | 4 | PVcap ≤ 800 | 633.3 | 633 | 1C |
| 0 | 3 | 100 < PVcap ≤ 1000 | 474 | 474 | |
| 0 | 2 | 600 < PVcap ≤ 1200 | 316.6 | Unable | |
| 0 | 1 | 1100 < PVcap ≤ 1400 | 158.3 | Unable | |
| Numbers of Operating Diesel Generators | PVcap Range (kW) | Credible Contingency Event (kW) | Maximum PVcap (kW) | Case Study | |
|---|---|---|---|---|---|
| 375-kVA | 625-kVA | ||||
| 3 | 4 | PVcap ≤ 440 | 1318.3 | 440 | |
| 3 | 3 | PVcap ≤ 640 | 1160 | 640 | |
| 3 | 2 | PVcap ≤ 840 | 1001.6 | 840 | |
| 3 | 1 | 200 < PVcap ≤ 1040 | 843.3 | 843 | 2C |
| 3 | 0 | 700 < PVcap ≤ 1240 | 685 | Unable | |
| 2 | 4 | PVcap ≤ 560 | 1223.3 | 560 | |
| 2 | 3 | PVcap ≤ 760 | 1065 | 760 | |
| 2 | 2 | PVcap ≤ 960 | 906.6 | 906 | 2A |
| 2 | 1 | 500 < PVcap ≤ 1160 | 748.3 | 748 | |
| 2 | 0 | 1000 < PVcap ≤ 1360 | 590 | Unable | |
| 1 | 4 | PVcap ≤ 680 | 1128.3 | 680 | |
| 1 | 3 | PVcap ≤ 880 | 970 | 880 | |
| 1 | 2 | 300 < PVcap ≤ 1080 | 811.6 | 811 | 2D |
| 1 | 1 | 800 < PVcap ≤ 1280 | 653.3 | Unable | |
| 1 | 0 | 1300 < PVcap ≤ 1480 | 495 | Unable | |
| 0 | 4 | PVcap ≤ 800 | 1033.3 | 800 | |
| 0 | 3 | 100 < PVcap ≤ 1000 | 874 | 874 | 2B |
| 0 | 2 | 600 < PVcap ≤ 1200 | 716.6 | 716 | |
| 0 | 1 | 1100 < PVcap ≤ 1400 | 558.3 | Unable | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Joung, K.W.; Lee, H.-J.; Park, J.-W. Assessment of Maximum Penetration Capacity of Photovoltaic Generator Considering Frequency Stability in Practical Stand-Alone Microgrid. Energies 2019, 12, 1445. https://doi.org/10.3390/en12081445
Joung KW, Lee H-J, Park J-W. Assessment of Maximum Penetration Capacity of Photovoltaic Generator Considering Frequency Stability in Practical Stand-Alone Microgrid. Energies. 2019; 12(8):1445. https://doi.org/10.3390/en12081445
Chicago/Turabian StyleJoung, Kwang Woo, Hee-Jin Lee, and Jung-Wook Park. 2019. "Assessment of Maximum Penetration Capacity of Photovoltaic Generator Considering Frequency Stability in Practical Stand-Alone Microgrid" Energies 12, no. 8: 1445. https://doi.org/10.3390/en12081445
APA StyleJoung, K. W., Lee, H.-J., & Park, J.-W. (2019). Assessment of Maximum Penetration Capacity of Photovoltaic Generator Considering Frequency Stability in Practical Stand-Alone Microgrid. Energies, 12(8), 1445. https://doi.org/10.3390/en12081445