Cogging Torque Reduction and Offset of Dual-Rotor Interior Permanent Magnet Motor in Electric Vehicle Traction Platforms

Abstract
:1. Introduction
2. Theory
2.1. Governing Equations
2.2. Cogging Torque and Characteristic Equation
3. Dual Rotor Modeling
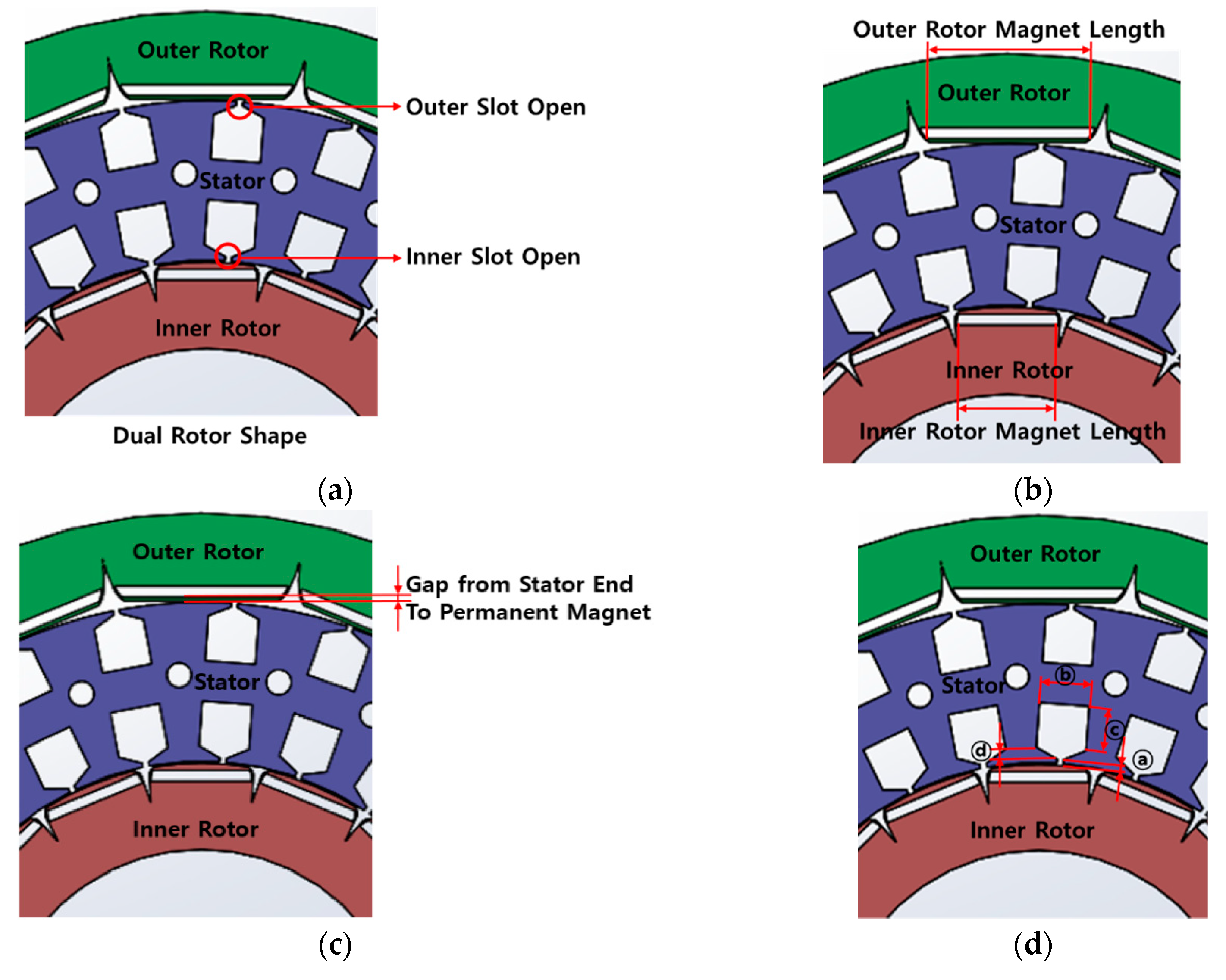
3.1. Machine Topology
3.2. Design Specifications of Dual Rotor IPM Motor
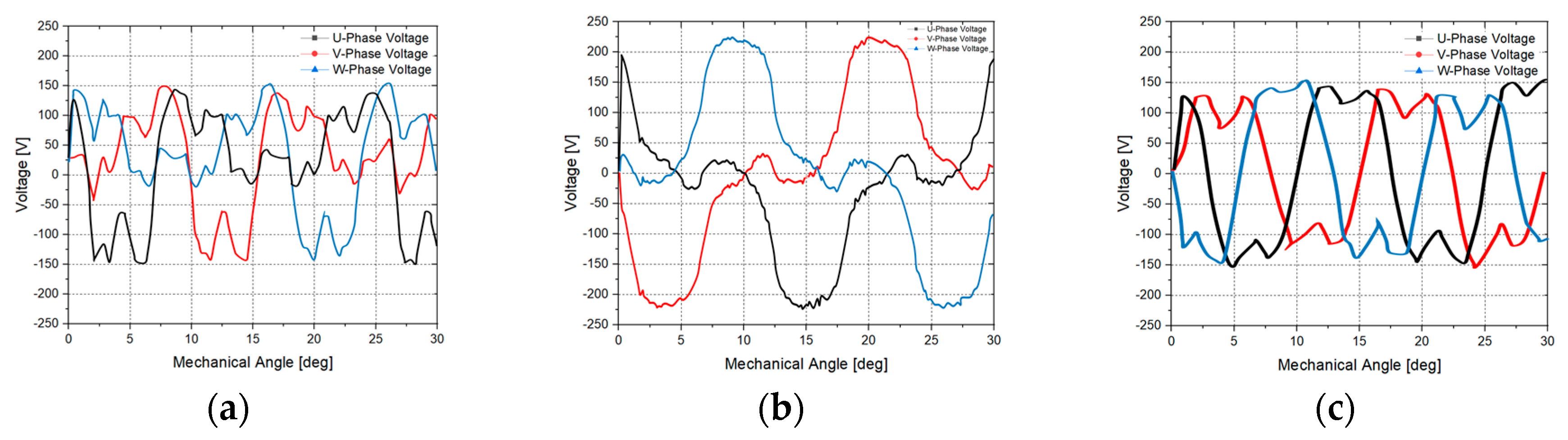
3.3. Experimental Methods for Cogging Torque Analysis
4. Comparison and Analysis Results
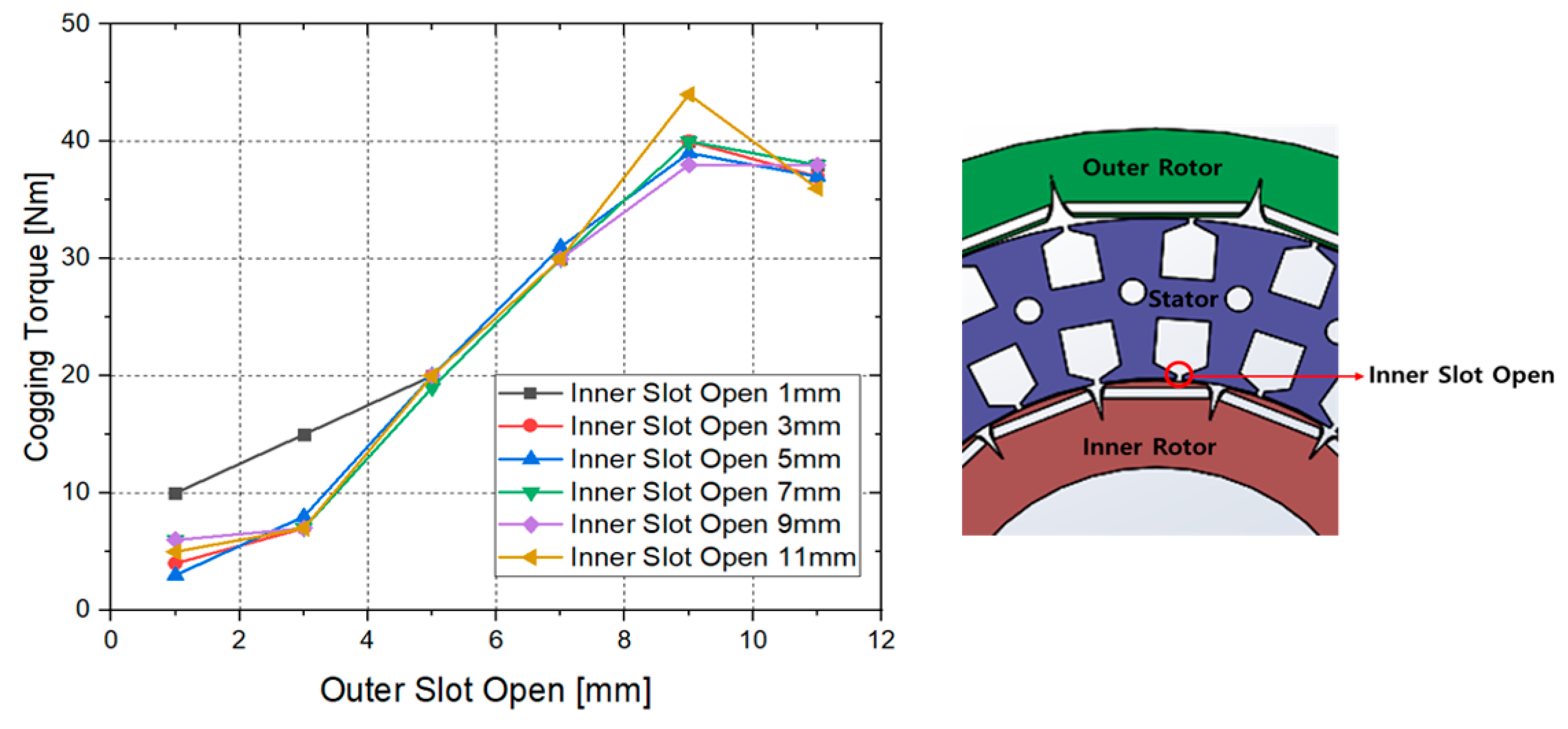
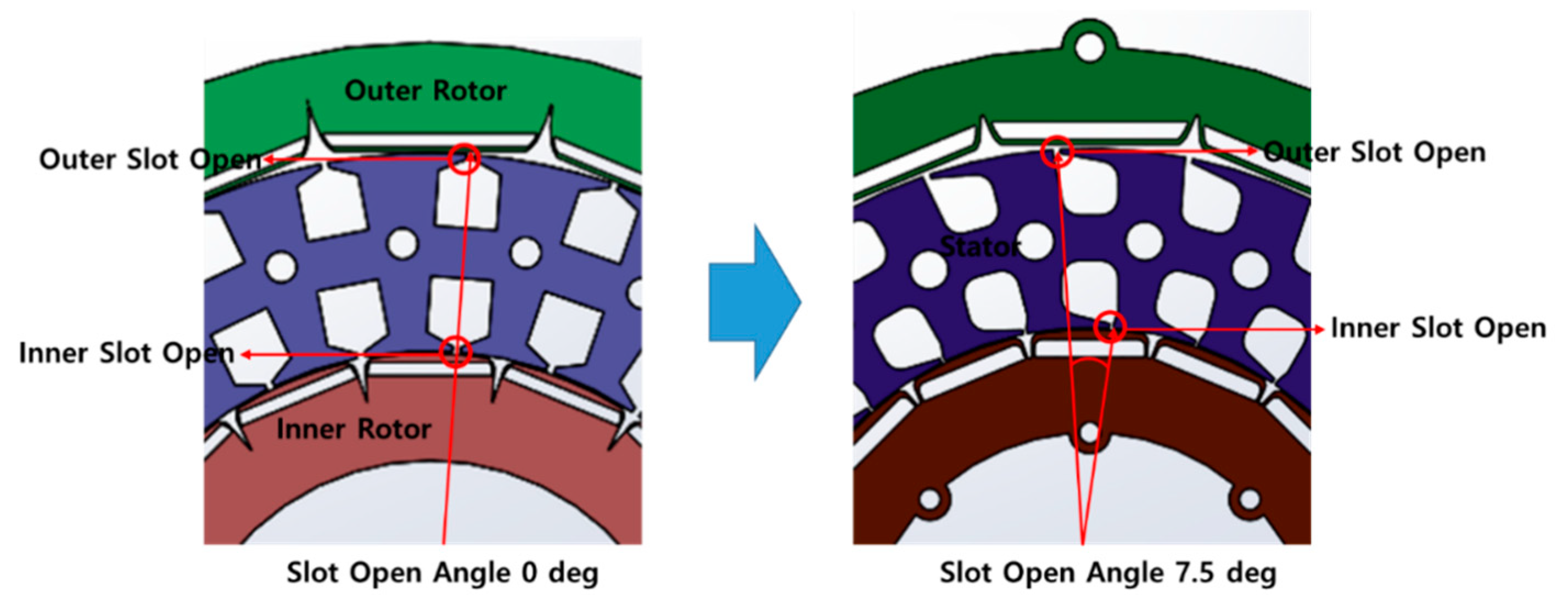
4.1. Cogging Torque Analysis of Dual Rotor Stator Slot Opening Length
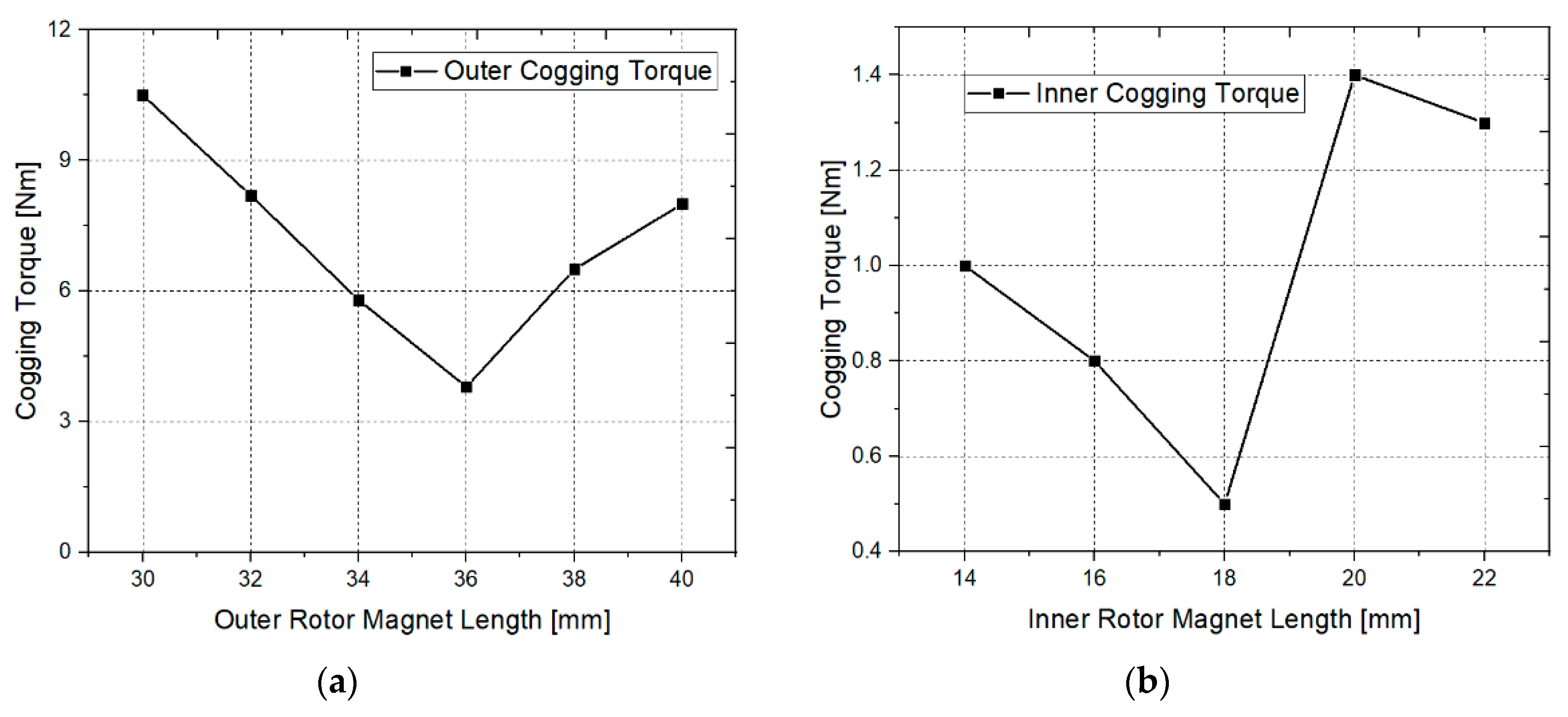
4.2. Analysis of Cogging Torque According to the Dual Rotor Magnet Length
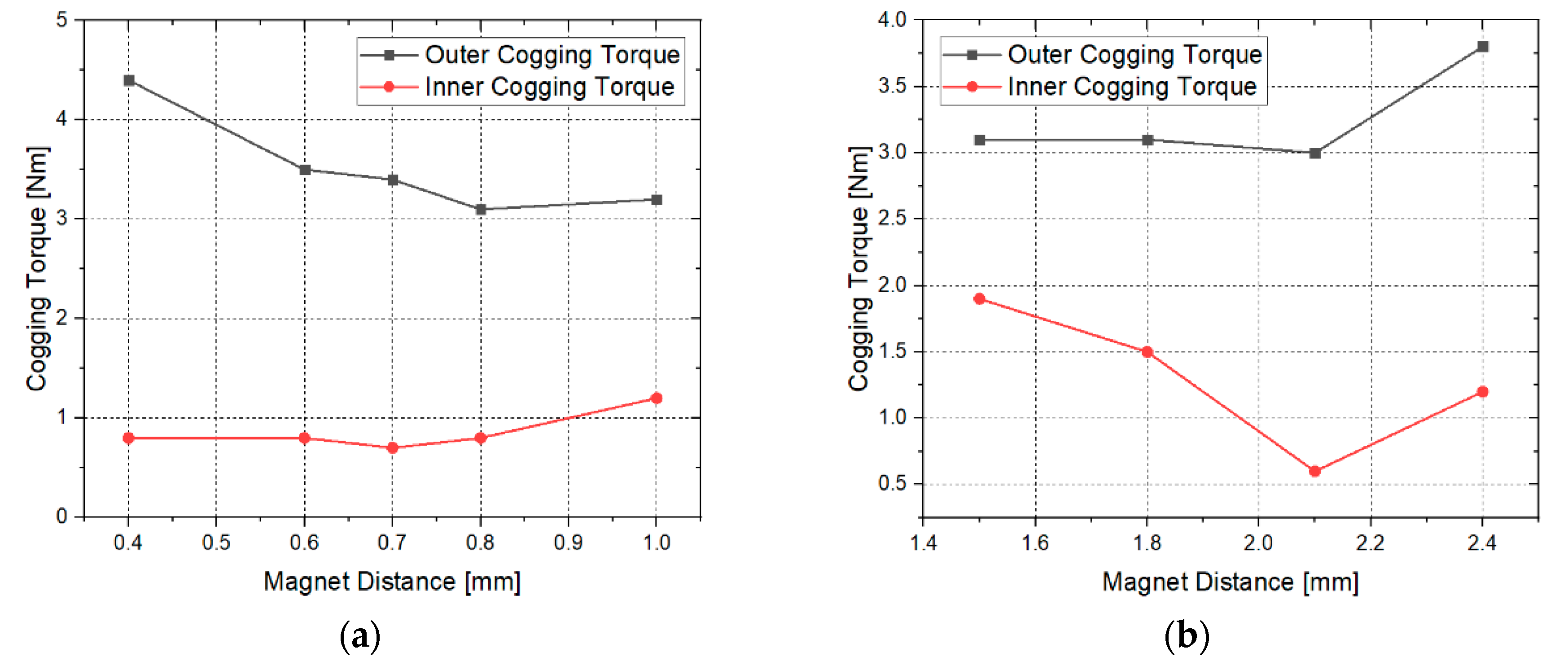
4.3. Analysis of Cogging Torque According to the Distance between Magnet and Rotor Tip
4.4. Analysis of Cogging Torque According to Stator Shape
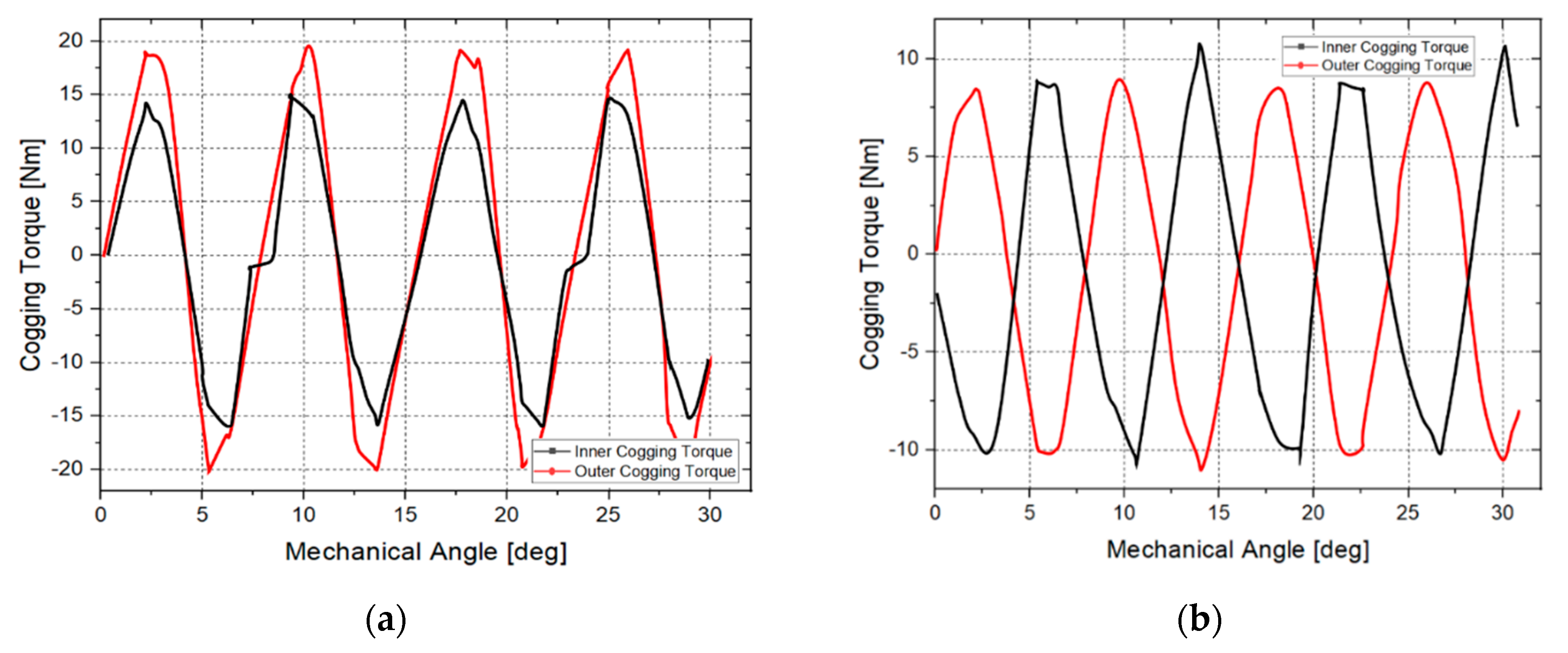
4.5. Analysis of Cogging Torque According to the Magnet Angles of Inner and Outer Rotors
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jahns, T.M.; Kliman, G.B.; Neumann, T.W. Interior permanent-magnet synchronous motors for adjustable-speed drives. IEEE Trans. Ind. Appl. 1986, 4, 738–747. [Google Scholar] [CrossRef]
- Kim, K.-C.; Lee, J.; Kim, H.J.; Koo, D.H. Multiobjective optimal design for interior permanent magnet synchronous motor. IEEE Trans. Magn. 2009, 45, 1780–1783. [Google Scholar]
- Stumberger, B.; Hamler, A.; Trlep, M.; Jesenik, M. Analysis of interior permanent magnet synchronous motor designed for flux weakening operation. IEEE Trans. Magn. 2001, 37, 3644–3647. [Google Scholar] [CrossRef]
- Aydin, M.; Husang, S.; Lipo, T.A. Optimum design and 3D finite element analysis of non-slotted and slotted internal rotor type axial flux PM disc machines. In Proceedings of the Power Engineering Society Summer Meeting, Vancouver, BC, Canada, 15–19 July 2001; pp. 1409–1416. [Google Scholar]
- Hill-Cottingham, R.J.; Coles, P.C.; Eastham, J.F.; Profumo, F.; Tenconi, A.; Gianolio, G. Multi-disc axial flux stratospheric propeller drive. In Proceedings of the IEEE IAS Annual Meeting Conference Record, Chicago, IL, USA, 30 September–4 October 2001; Volume 3, pp. 1634–1639. [Google Scholar]
- Sun, L.; Cheng, M.; Jia, H. Analysis of a novel magnetic-geared dual-rotor motor with complementary structure. IEEE Trans. Ind. Electron. 2015, 62, 6737–6747. [Google Scholar] [CrossRef]
- Varga, J.S. Dual Rotor Axial Air Gap Induction Motor. U.S. Patent 4,959,578, 25 September 1990. [Google Scholar]
- Hoare, G.; Ortmann, W. Dual Rotor Motor for a Hybrid Vehicle Transmission. U.S. Patent 7,240,751, 10 July 2007. [Google Scholar]
- Radev, V. Dual-Rotor Electric Traction Motor. U.S. Patent 7,466,053, 16 December 2008. [Google Scholar]
- Qu, R.; Lipo, T.A. Design and parameter effect analysis of dual-rotor, radial-flux, toroidally wound, permanent-magnet machines. IEEE Trans. Ind. Appl. 2004, 40, 771–779. [Google Scholar] [CrossRef]
- Kang, G.-H.; Song, Y.-D.; Kim, G.-T.; Hur, J. The Novel Cogging Torque Reduction Method for Interior Type Permanent Magnet Motor. IEEE Trans. Ind. Appl. 2009, 45, 161–167. [Google Scholar] [CrossRef]
- Kisoumarsi, A.; Moalle, M.; Fashimi, B. Midigation of Torque Ripple in Interior Permanent Magnet Motors by Optical Shape Design. IEEE Trans. Magn. 2005, 42, 3706–3711. [Google Scholar] [CrossRef]
- Lai, Y.-S.; Chen, J.-H. A new approach to direct torque control of induction motor drives for constant inverter switching frequency and torque ripple reduction. IEEE Trans. Energy Convers. 2001, 16, 220–227. [Google Scholar]
- Lee, D.H.; Kim, C.H.; Kwon, Y.A. Reduction of torque ripple of PMSM using iterative flux estimation. Trans. Korean Inst. Power Electron. 2001, 6, 346–350. [Google Scholar]
- Mi, C.; Filippa, M.; Liu, W.; Ma, R. Analytical method for prediction the air-gap flux of interior-type permanent magnet machine. IEEE Trans. Magn. 2004, 4, 50–58. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Kim, K.-T.; Hur, J. Finite-element analysis of the demagnetization of IPM-type BLDC motor with stator turn fault. IEEE Trans. Magn. 2014, 50, 889–892. [Google Scholar] [CrossRef]
- Choi, J.S.; Izui, K.; Nishiwaki, S.; Kawamoto, A.; Nomura, T. Rotor pole design of IPM motors for a sinusoidal air-gap flux density distribution. Struct. Multidiscip. Optim. 2012, 46, 445–455. [Google Scholar] [CrossRef]
- Kim, H.-K.; Hur, J. Dynamic characteristic analysis of irreversible demagnetization in SPM-and IPM-type BLDC motors. IEEE Trans. Ind. Appl. 2017, 53, 982–990. [Google Scholar] [CrossRef]
- Chen, S.; Song, A.; Sekiguchi, T. High Efficiency and Low Torque Ripple Control of Permanent Magnet Synchronous Motor Based on The Current Tracking Vector of Electromotive Force. In Proceedings of the Conference Record of the 2000 IEEE Industry Applications Conference. Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy (Cat. No.00CH37129), Rome, Italy, 8–12 October 2000. [Google Scholar]
- Yang, Y.; Castano, S.; Yang, R.; Kasprzak, M.; Bilgin, B.; Sathyan, A.; Dadkhah, H.; Emadi, A. Design and Comparison of Interior Permanent Magnet Motor Topologies for Traction Application. IEEE Trans. Transp. Electrif. 2017, 3, 86–97. [Google Scholar] [CrossRef]
- Kwak, J.; Min, S.; Hong, J.P. Optimal Stator Design of Interior Permanent Magnet Motor to Reduce Torque Ripple Using Level Set Method. IEEE Trans. Magn. 2010, 46, 2108–2111. [Google Scholar] [CrossRef]
- Lee, S.H.; Hong, J.P.; Hwang, S.M. Optimal Design for Noise Reduction in Interior Permanent-Magnet Motor. IEEE Trans. Ind. Appl. 2009, 45, 1945–1960. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Capacity (kW) | Phase (phase) | Number of Poles | Number of Slots | Rated Voltage (V) | Current Range (A) | Rated Velocity (rpm) |
|---|---|---|---|---|---|---|
| 20 | 3 | 16 | 24 | 310 | 72 A_rms | 2200 |
| (a) Permanent Magnet Length of Outer Rotor | (b) Permanent Magnet Length of Inner Rotor | ||
|---|---|---|---|
| Permanent Magnet Length (mm) | Outer Cogging Torque (Nm) | Permanent Magnet Length (mm) | Inner cogging Torque (Nm) |
| 30 | 10.5 | 14 | 1.0 |
| 32 | 8.2 | 16 | 0.8 |
| 34 | 5.8 | 18 | 0.5 |
| 36 | 3.8 | 20 | 1.4 |
| 38 | 6.5 | 22 | 1.3 |
| 40 | 8.0 | ||
| (a) Permanent Magnet Length of Outer Rotor | (b) Permanent Magnet Length of Inner Rotor | ||
|---|---|---|---|
| Permanent Magnet Length (mm) | Outer Cogging Torque (Nm) | Permanent Magnet Length (mm) | Inner cogging Torque (Nm) |
| 35 | 4.8 | 16.5 | 0.5 |
| 35.5 | 4.2 | 17 | 0.6 |
| 36 | 3.8 | 17.5 | 0.4 |
| 36.5 | 3.6 | 18 | 0.5 |
| 37 | 3.9 | 18.5 | 0.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, M.-H.; Lee, H.-S.; Yang, S.-H.; Lee, G.-S.; Han, J.-H.; Kim, D.-H.; Kim, H.-W.; Cha, H.-R. Cogging Torque Reduction and Offset of Dual-Rotor Interior Permanent Magnet Motor in Electric Vehicle Traction Platforms. Energies 2019, 12, 1761. https://doi.org/10.3390/en12091761
Hwang M-H, Lee H-S, Yang S-H, Lee G-S, Han J-H, Kim D-H, Kim H-W, Cha H-R. Cogging Torque Reduction and Offset of Dual-Rotor Interior Permanent Magnet Motor in Electric Vehicle Traction Platforms. Energies. 2019; 12(9):1761. https://doi.org/10.3390/en12091761
Chicago/Turabian StyleHwang, Myeong-Hwan, Hae-Sol Lee, Se-Hyeon Yang, Gye-Seong Lee, Jong-Ho Han, Dong-Hyun Kim, Hyeon-Woo Kim, and Hyun-Rok Cha. 2019. "Cogging Torque Reduction and Offset of Dual-Rotor Interior Permanent Magnet Motor in Electric Vehicle Traction Platforms" Energies 12, no. 9: 1761. https://doi.org/10.3390/en12091761