Potential for CO2 Reduction by Dynamic Wireless Power Transfer for Passenger Vehicles in Japan


Abstract
:1. Background
2. CO2 Emission by Electric Vehicle
2.1. CO2 Emission Procedure by Electric Vehicle
2.2. Analysis for Energy Consumption of Electric Vehicle
3. CO2 Reduction by DWPT System
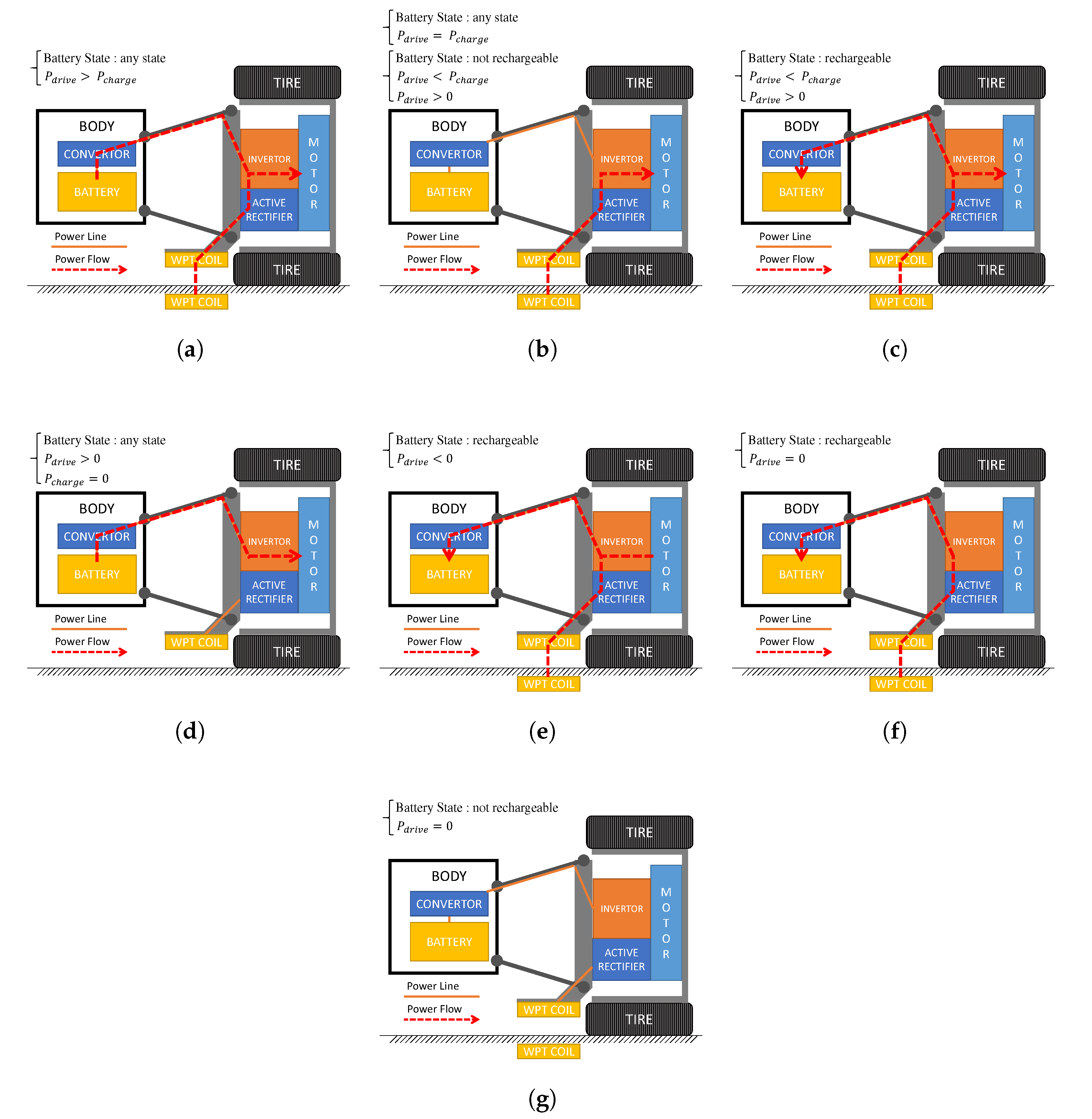
3.1. Wireless In-Wheel Motor
- (a)
- Driving with Energy of Battery and WPT
- (b)
- Driving with only Energy of WPT
- (c)
- Driving with only battery power
- (d)
- Driving and Charging using WPT energy
- (e)
- Charging with Energy of Regeneration and WPT
- (f)
- Charging with Energy of WPT
- (g)
- Not Driving or Charging
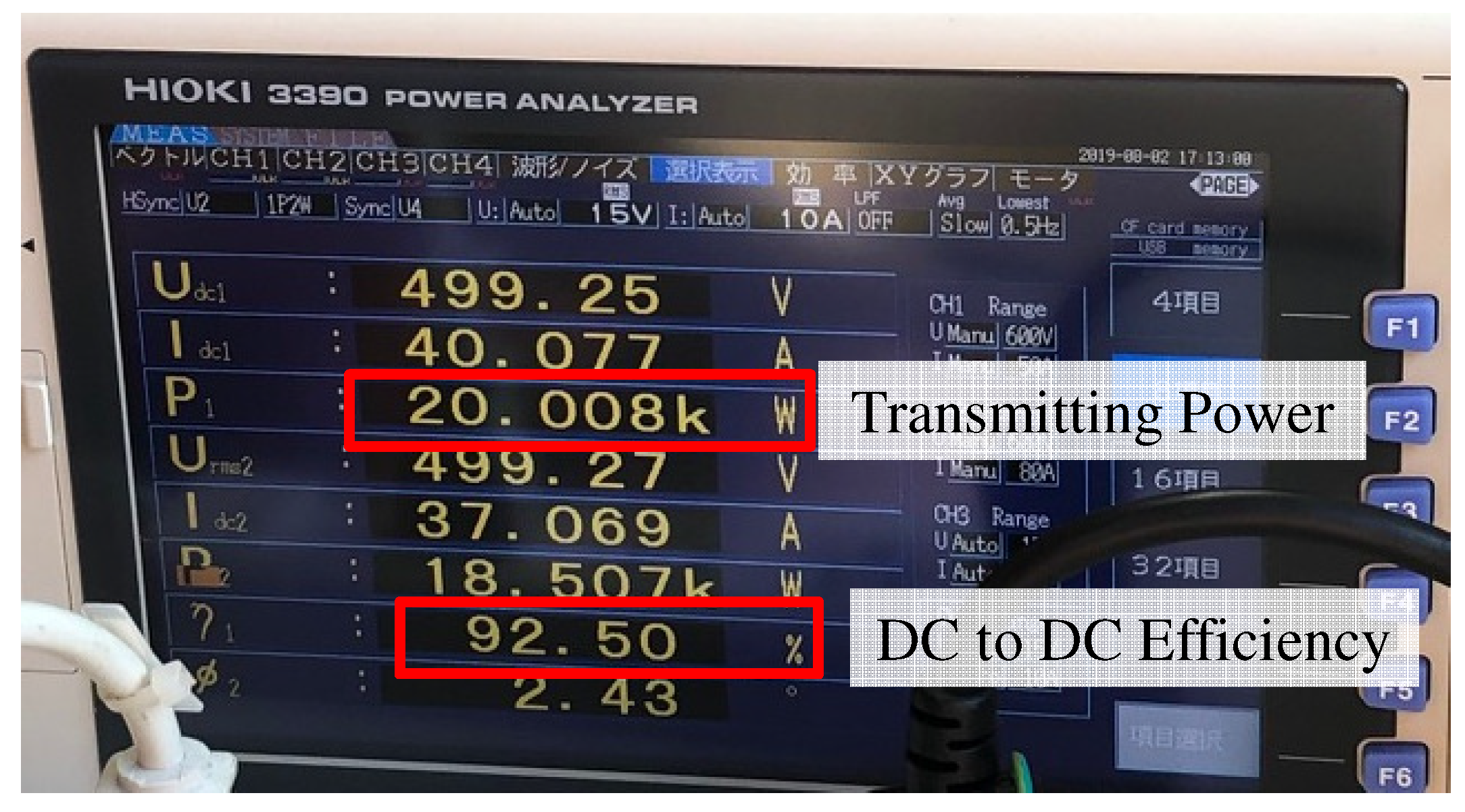
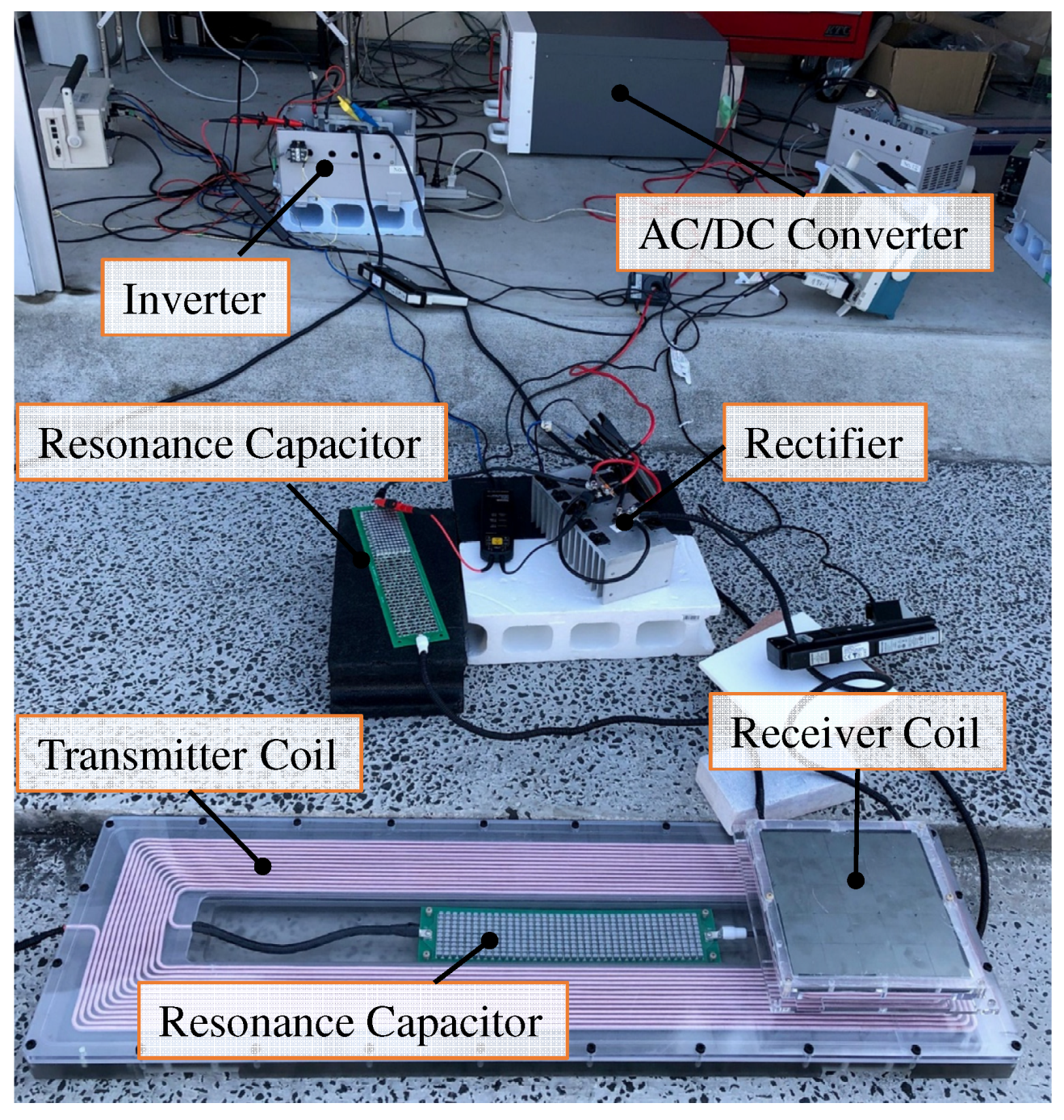
3.2. Efficiency of WPT
4. CO2 Reduction by DWPT System
4.1. Precondition of Comparison
4.2. Comparison of CO2 Emission
4.3. Sensitivity Analysis for Parameters
5. Discussion
- (1)
- Improve efficiency
- (2)
- Evaluation of durability and reliability
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Energy Agency Home Page. Available online: https://www.iea.org/data-and-statistics/data-tables?country=JAPAN&energy=Balances&year=2017 (accessed on 27 April 2019).
- Ministry of Land, Infrastructure, Transport and Tourism Japan Home Page. Available online: https://www.mlit.go.jp/sogoseisaku/environment/sosei_environment_tk_000007.html (accessed on 27 April 2019).
- National Greenhouse Gas Inventory Report of JAPAN. Available online: http://www-gio.nies.go.jp/aboutghg/nir/2020/NIR-JPN-2020-v3.0_GIOweb.pdf (accessed on 27 April 2019).
- Oliveira, L.; Messagie, M.; Rangarajum, S.; Sanfelix, J.; Hernandez, M.; Joeri, R.; Mierlo, V. Key issues of lithium-ion batteries—From resource depletion to environmental performance indicators. J. Clean. Prod. 2015, 108, 354–362. [Google Scholar] [CrossRef]
- Tajima, T.; Noguchi, W.; Aruga, T. Study of a Dynamic Charging System for Achievement of Unlimited Cruising Range in EV; SAE Technical Paper 2015-01-1686; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljacic, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fujita, T.; Yasuda, T.; Akagi, H. A Dynamic Wireless Power Transfer System Applicable to a Stationary System. IEEE Trans. Ind. Appl. 2017, 53, 3748–3757. [Google Scholar] [CrossRef]
- Zaheer, A.; Neath, M.; Beh, H.Z.Z.; Covic, G.A. A Dynamic EV Charging System for Slow Moving Traffic Applications. IEEE Trans. Transp. Electrif. 2017, 3, 354–369. [Google Scholar] [CrossRef]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless Power Transfer for Vehicular Applications: Overview and Challenges. IEEE Trans. Transp. Electrif. 2018, 4, 3–37. [Google Scholar] [CrossRef]
- Jiang, C.; Sun, Y.; Wang, Z.; Tang, C. Multi-Load Mode Analysis for Electric Vehicle Wireless Supply System. Energies 2018, 11, 1925. [Google Scholar] [CrossRef] [Green Version]
- Choi, S.Y.; Gu, W.B.; Jeong, S.Y.; Rim, C.T. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 18–36. [Google Scholar] [CrossRef]
- Mi, C.C.; Buja, G.; Choi, S.Y.; Rim, C.T. Modern Advances in Wireless Power Transfer Systems for Roadway Powered Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6533–6545. [Google Scholar] [CrossRef]
- Tan, L.; Zhao, W.; Ju, M.; Liu, H.; Huang, X. Research on an EV Dynamic Wireless Charging Control Method Adapting to Speed Change. Energies 2019, 12, 2214. [Google Scholar] [CrossRef] [Green Version]
- Tampubolon, M.; Pamungkas, L.; Chiu, H.-J.; Liu, Y.-C.; Hsieh, Y.-C. Dynamic Wireless Power Transfer for Logistic Robots. Energies 2018, 11, 527. [Google Scholar] [CrossRef] [Green Version]
- Pugi, L.; Reatti, A.; Corti, F. Application of Wireless Power Transfer to Railway Parking Functionality: Preliminary Design Considerations with Series-Series and LCC Topologies. J. Adv. Transp. 2018, 2018, 8103140. [Google Scholar] [CrossRef] [Green Version]
- Reatt, A.; Corti, F.; Pugi, L.; Berzi, L.; Barbieri, R.; Delogu, M.; Pierini, M. Application of induction power recharge to garbage collection service. In Proceedings of the 2017 IEEE 3rd International Forum on Research and Technologies for Society and Industry (RTSI), Modena, Italy, 11–13 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Hata, K.; Imura, T.; Hori, Y. Primary-side Efficiency Control of Wireless Power Transfer Systems Based on Secondary-side Power Control with Half Active Rectifier. IEE J. Trans. Ind. Appl. 2018, 138, 22–29. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Mi, C.C. Compensation Topologies of High-Power Wireless Power Transfer Systems. IEEE Trans. Veh. Technol. 2016, 65, 4768–4778. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Hofmann, H.; Mi, C. A Double-Sided LCLC-Compensated Capacitive Power Transfer System for Electric Vehicle Charging. IEEE Trans. Power Electron. 2015, 30, 6011–6014. [Google Scholar] [CrossRef]
- Yi, K. Capacitive Coupling Wireless Power Transfer with Quasi-LLC Resonant Converter Using Electric Vehicles Windows. Electronics 2020, 9, 676. [Google Scholar] [CrossRef] [Green Version]
- Nissan Home Page Specification Sheet. Available online: https://www3.nissan.co.jp/content/dam/Nissan/jp/vehicles/leaf/1912/pdf/leaf_1912_specsheet.pdf (accessed on 15 June 2020).
- Song, K.; Li, Z.; Jiang, J.; Zhu, C. Constant Current/Voltage Charging Operation for Series-Series and Series-Parallel Compensated Wireless Power Transfer Systems Employing Primary-Side Controller. IEEE Trans. Power Electron. 2018, 33, 8065–8080. [Google Scholar] [CrossRef]
- Rohm Home Page Specification Sheet of SiC Power Module. Available online: https://fscdn.rohm.com/en/products/databook/datasheet/discrete/sic/power_module/bsm120d12p2c005-e.pdf (accessed on 15 June 2020).
- Gunji, D.; Hata, K.; Shimizu, O.; Imura, T.; Fujimoto, H. Feasibility Study on In-motion Wireless Power Transfer System Before Traffic Lights Section. In Proceedings of the 2019 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), London, UK, 18–21 June 2019; pp. 302–307. [Google Scholar] [CrossRef]
- Report of the Analysis for GHG Emission and Total Efficiencyt. Available online: http://www.jari.or.jp/Portals/0/jhfc/data/report/2010/pdf/result.pdf (accessed on 15 June 2020).
- Ministerial Ordinance by Ministry of the Environment Japan. Available online: https://elaws.e-gov.go.jp/search/elawsSearch/elaws_search/lsg0500/detail?lawId=418M60001400003 (accessed on 15 June 2020).
- Emission Coefficient of Major Power Plant. Available online: https://ghg-santeikohyo.env.go.jp/files/calc/itiran2019.pdf (accessed on 15 June 2020).
- Hamagata, S.; Nagai, Y.; Inamura, T.; Asano, K.; Tagashira, N. Research Report “Quantitative Analysis of Economy, Demand and Supply of Energy for Achieving 80% Reduction of CO2 Emission”; Central Research Institute of Electric Power Industry: Tokyo, Japan, 2019. [Google Scholar]
- Kobayashi, D.; Imura, T.; Hori, Y. Real-time Maximum Efficiency Control in Dynamic Wireless Power Transfer System. IEEJ Trans. Ind. Appl. 2016, 136, 425–432. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, L.; Guo, Y.; Liao, C.; Li, F. Applying LCC Compensation Network to Dynamic Wireless EV Charging System. IEEE Trans. Ind. Electron. 2016, 63, 6557–6567. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Vehicle Mass (kg) | 1670 | |
| Maximum Vehicle Mass (kg) | 1945 | |
| Road Resistance Coefficient (N/kg) | 0.0094 | |
| Air Resistance Coefficient () | 0.495 | |
| Electric Consumption (Wh/km) | 161 | |
| Cruise Range (km) | 570 | |
| Battery Capacity (Wh) | 62,000 | |
| Passenger and Baggage Mass (kg) | 100 | |
| Additional Baggage Mass (kg) | 26.25 |
| Symbol | Parameter | Value |
|---|---|---|
| - | Transmitter Coil Size (mm) | L1086 × W318 × H45 |
| Resistance of Transmitter Coil (m) | 98.5 | |
| Self-inductance of Transmitter Coil (H) | 247 | |
| - | Receiver Coil Size (mm) | L230 × W230 × H26.5 |
| Resistance of Receiver Coil (m) | 28.1 | |
| Self-inductance of Receiver Coil (H) | 101 | |
| Mutual Inductance (H) | 23.5 | |
| Voltage of Transmitter (V) | 0–630 | |
| Voltage of Receiver (V) | − 658 | |
| - | Mass of Receiver Coil (kg) | 5 |
| - | Type of Litz Wire | AWG44 × 6250 |
| Parameter | Value |
|---|---|
| Drain-source Voltage (V) | 1200 |
| Drain Current (A) | 134 |
| Isolation Voltage (V) | 2500 |
| Gate Resistance(25 C) () | 1.8 |
| Junction-to-Case Thermal Resistance (C/W) | 0.16 |
| Case-to-heat sink Thermal resistance (C/W) | 0.035 |
| Symbol | Parameter | Value |
|---|---|---|
| Fuel Consumption (L/km) | 0.0685 | |
| - | Capacity of Fuel Tank (L) | 50 |
| - | Cruise Range (km) | 730 |
| Symbol | Parameter | Value | |
|---|---|---|---|
| DWPT | Long Range Drivable | ||
| - | Cruise Range (km) | Theoretically Infinity | 730 |
| Vehicle Mass (kg) | 1338 | 2252 | |
| - | Capacity of Battery (Wh) | 15,000 | 142,000 |
| Road Resistance Coefficient (N/kg) | 0.0094 | ||
| Air Resistance Coefficient () | 0.495 | ||
| Passenger and Baggage Mass (kg) | 100 | ||
| Additional Baggage Mass (kg) | 26.25 | ||
| Driving Efficiency (%) | 88.6 | ||
| Charging Efficiency (%) | 84 | ||
| DWPT Efficiency (%) | 92.5 | ||
| Symbol | Parameter | Value |
|---|---|---|
| Emission Factor of Well to Tank (g-CO/MJ) | 16.6 | |
| Calorific Value of Gasoline (MJ/L) | 33.7 | |
| Emission Factor to Combust Gasoline (g-CO/L) | 2322 | |
| Emission Factor of Electricity (g-CO/Wh) | 0.462 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shimizu, O.; Nagai, S.; Fujita, T.; Fujimoto, H. Potential for CO2 Reduction by Dynamic Wireless Power Transfer for Passenger Vehicles in Japan. Energies 2020, 13, 3342. https://doi.org/10.3390/en13133342
Shimizu O, Nagai S, Fujita T, Fujimoto H. Potential for CO2 Reduction by Dynamic Wireless Power Transfer for Passenger Vehicles in Japan. Energies. 2020; 13(13):3342. https://doi.org/10.3390/en13133342
Chicago/Turabian StyleShimizu, Osamu, Sakahisa Nagai, Toshiyuki Fujita, and Hiroshi Fujimoto. 2020. "Potential for CO2 Reduction by Dynamic Wireless Power Transfer for Passenger Vehicles in Japan" Energies 13, no. 13: 3342. https://doi.org/10.3390/en13133342
APA StyleShimizu, O., Nagai, S., Fujita, T., & Fujimoto, H. (2020). Potential for CO2 Reduction by Dynamic Wireless Power Transfer for Passenger Vehicles in Japan. Energies, 13(13), 3342. https://doi.org/10.3390/en13133342