Solving the Optimal Reactive Power Dispatch Using Marine Predators Algorithm Considering the Uncertainties in Load and Wind-Solar Generation Systems




Abstract
:1. Introduction
- Evolutionary-based algorithms such as differential evolution [15], specialized genetic algorithm (SGA) [16], evolutionary programming [17], modified differential evolution [18], pareto evolutionary algorithm [19], comprehensive learning particle swarm optimization [20], and enhanced grey wolf optimizer (EGWO) [21];
- Hybrid-based algorithms such as hybridization of the particle swarm optimization method and the tabu-search technique [30].
- Solving the ORPD problem by utilizing one of the newest algorithms, called the marine predators algorithm (MPA);
- The validity of the proposed algorithm for minimizing the power loss and the total voltage deviations is investigated and compared with the state-of-the-art techniques;
- The ORPD problem is solved by incorporating the renewable energy resources, including wind turbine and solar PV systems;
- The ORPD problem is solved to minimize the expected power loss with considering the uncertainties of the load demand and the output powers of wind and solar generation systems;
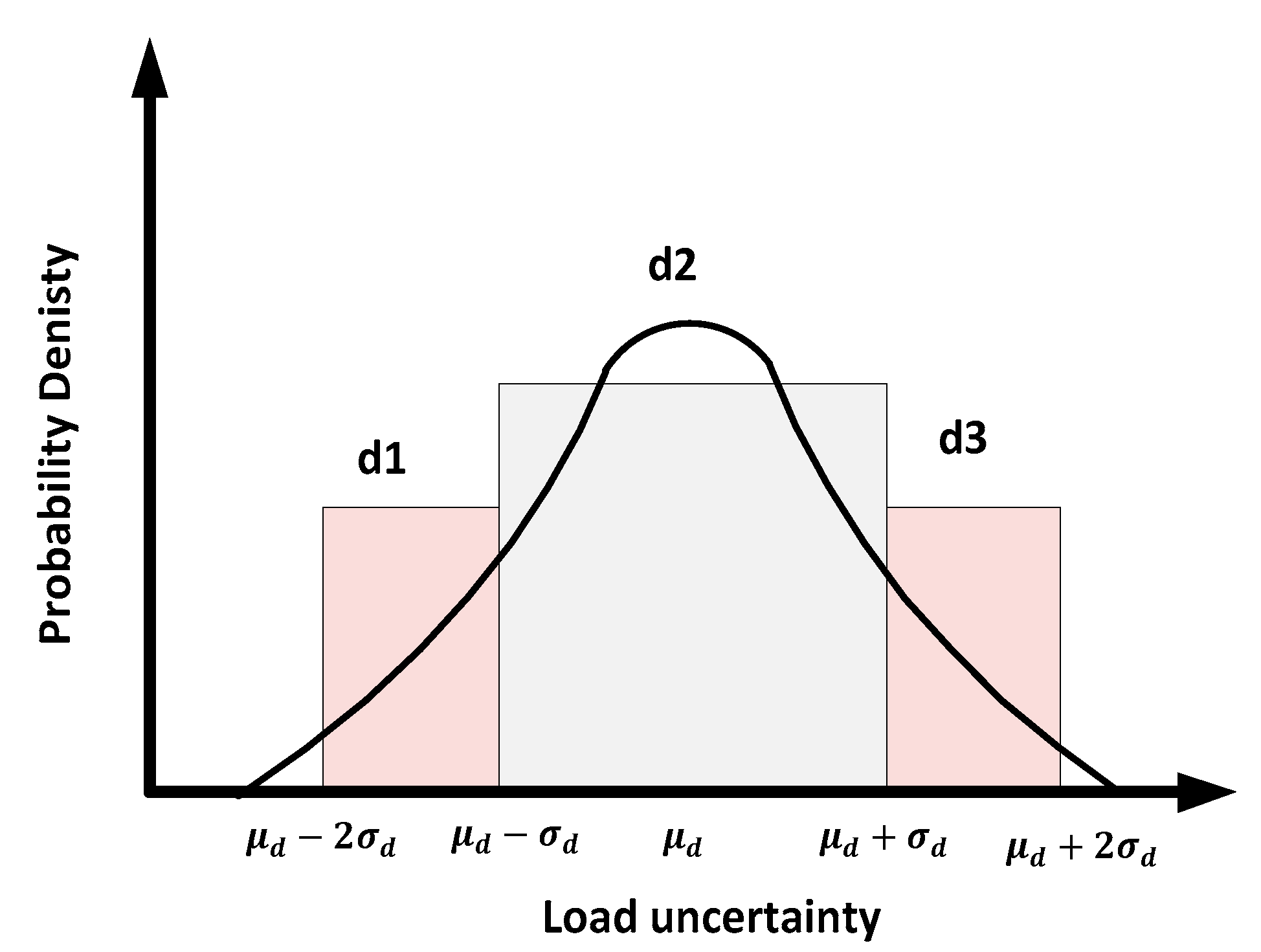
- Weibull PDF, Beta PDF and normal PDF are utilized for modeling the uncertainties of wind speed, the solar irradiance and the load demand, respectively. In addition, the scenario-based method is used to model the combination of load-generation uncertainty.
2. Problem Formulation
2.1. Objective Function
2.2. Constraints
3. Uncertainty Modeling
3.1. Modeling of Load Demand
3.2. Modeling of Wind Speed
3.3. Modeling of Solar Irradiance
3.4. The Combined Load-Generation Model
4. Optimization Algorithm
5. Simulation Results
5.1. Case 1: ORPD Solution without Considering the Uncertainty
5.2. Case 2: Solution of ORPD Problem Considering the Uncertainty
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ALO | Ant Lion Optimizer |
| BBO | biogeography-based optimization |
| CSA | Cuckoo search algorithm |
| CLPSO | comprehensive learning PSO |
| FA | firefly algorithm |
| GSA | gravitational search algorithm |
| GSA-CSS | gravitational search algorithm conditional selection strategies |
| HAS | harmony search algorithm |
| HPSO–TS | Hybrid PSO with the Tabu search |
| HSSSA | Hybrid salp swarm algorithm and simulated annealing |
| IPG-PSO | Improved pseudo-gradient PSO |
| ISSO | improved social spider optimization |
| JA | Jaya Algorithm |
| IDE | Improved Differential Evolution |
| IGSA-CSS | Improved GSA-CSS |
| IAL | Improved Antlion Optimization |
| MSSA | Modified salp swarm algorithm |
| PSO | particle swarm optimization |
| PSO-TVAC | PSO with time varying acceleration coefficients |
| PSO-TVIW | PSO with time varying inertia weight |
| PG-PSO | PSO with pseudo gradient search |
| PSO-CF | PSO with constriction factor |
| SPSO-TVAC | PSO with time varying acceleration coefficients |
| PSO-TVAC | PSO with time varying acceleration coefficients |
| QOTLBO | Teaching Learning based Optimization |
| SGA | Specialized Genetic Algorithm |
| SSO | social spider optimization |
| SSA | Salp swarm algorithm |
| STGA | Standard Genetic Algorithm |
| TLBO | Quasi-oppositional Teaching Learning based Optimization |
| TS | Tabu Search |
| WOA | Whale optimization algorithm |
Nomenclature
| P, Q, S | Active, Reactive, Apparent powers |
| B, G | Substance, Conductance |
| The injected kVAR of compensator | |
| The voltage of the generator | |
| The voltage of the load bus | |
| Tap of the transformer | |
| Apparent power flow in TL | |
| The control variables vector | |
| The State variables vector | |
| Summation of voltage deviations | |
| Total power loss | |
| The generated active | |
| The generated reactive | |
| No. of compensators | |
| No. of load buses | |
| No. of generation buses | |
| No. of transmission lines | |
| No. of scenarios | |
| Maximum No. of iterations | |
| Current iteration | |
| Penalty factors | |
| Superscript of maximum and minimum limit | |
| Superscript of limit boundary | |
| Probability density function of load | |
| Weibull probability density function | |
| Beta probability density function of solar irradiance | |
| , | The standard and mean deviation values of the load demand |
| The expected power loss | |
| The total expected power losses |
References
- Wu, Q.; Cao, Y.; Wen, J. Optimal reactive power dispatch using an adaptive genetic algorithm. Int. J. Electr. Power Energy Syst. 1998, 20, 563–569. [Google Scholar] [CrossRef]
- Devaraj, D.; Roselyn, J.P. Genetic algorithm based reactive power dispatch for voltage stability improvement. Int. J. Electr. Power Energy Syst. 2010, 32, 1151–1156. [Google Scholar] [CrossRef]
- Saddique, M.S.; Bhatti, A.R.; Haroon, S.S.; Sattar, M.K.; Amin, S.; Sajjad, I.A.; Ul Haq, S.S.; Awan, A.B.; Rasheed, N. Solution to optimal reactive power dispatch in transmission system using meta-heuristic techniques―Status and technological review. Electr. Power Syst. Res. 2020, 178, 106031. [Google Scholar] [CrossRef]
- Quintana, V.; Santos-Nieto, M. Reactive-power dispatch by successive quadratic programming. IEEE Trans. Energy Convers. 1989, 4, 425–435. [Google Scholar] [CrossRef]
- Terra, L.; Short, M. Security-constrained reactive power dispatch. IEEE Trans. Power Syst. 1991, 6, 109–117. [Google Scholar] [CrossRef]
- Lee, K.; Park, Y.; Ortiz, J. A united approach to optimal real and reactive power dispatch. IEEE Trans. Power Appar. Syst. 1985, 1147–1153. [Google Scholar] [CrossRef]
- Granville, S. Optimal reactive dispatch through interior point methods. IEEE Trans. Power Syst. 1994, 9, 136–146. [Google Scholar] [CrossRef]
- Ebeed, M.; Kamel, S.; Jurado, F. Optimal power flow using recent optimization techniques. In Classical and Recent Aspects of Power System Optimization; Academic Press: Cambridge, MA, USA, 2018; pp. 157–183. [Google Scholar]
- Zhao, B.; Guo, C.; Cao, Y. A multiagent-based particle swarm optimization approach for optimal reactive power dispatch. IEEE Trans. Power Syst. 2005, 20, 1070–1078. [Google Scholar] [CrossRef]
- Mouassa, S.; Bouktir, T.; Salhi, A. Ant lion optimizer for solving optimal reactive power dispatch problem in power systems. Eng. Sci. Technol. Int. J. 2017, 20, 885–895. [Google Scholar] [CrossRef]
- Ben oualid Medani, K.; Sayah, S.; Bekrar, A. Whale optimization algorithm based optimal reactive power dispatch: A case study of the Algerian power system. Electr. Power Syst. Res. 2018, 163, 696–705. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Vo, D.N. Improved social spider optimization algorithm for optimal reactive power dispatch problem with different objectives. Neural Comput. Appl. 2020, 32, 5919–5950. [Google Scholar] [CrossRef]
- Li, Z.; Cao, Y.; Dai, L.V.; Yang, X.; Nguyen, T.T. Finding solutions for optimal reactive power dispatch problem by a novel improved antlion optimization algorithm. Energies 2019, 12, 2968. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Fatah, S.; Ebeed, M.; Kamel, S.; Nasrat, L. Moth Swarm Algorithm for Reactive Power Dispatch Considering Stochastic Nature of Renewable Energy Generation and Load. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 594–599. [Google Scholar]
- Abou El Ela, A.; Abido, M.; Spea, S. Differential evolution algorithm for optimal reactive power dispatch. Electr. Power Syst. Res. 2011, 81, 458–464. [Google Scholar] [CrossRef]
- Villa-Acevedo, W.M.; López-Lezama, J.M.; Valencia-Velásquez, J.A. A novel constraint handling approach for the optimal reactive power dispatch problem. Energies 2018, 11, 2352. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.H.; Ma, J. Power system optimal reactive power dispatch using evolutionary programming. IEEE Trans. Power Syst. 1995, 10, 1243–1249. [Google Scholar] [CrossRef]
- Prasad, D.; Banerjee, A.; Singh, R.P. Optimal Reactive Power Dispatch Using Modified Differential Evolution Algorithm. In Advances in Computer, Communication and Control; Springer: Berlin/Heidelberg, Germany, 2019; pp. 275–283. [Google Scholar]
- Abido, M.A. Multiobjective optimal VAR dispatch using strength pareto evolutionary algorithm. In Proceedings of the 2006 IEEE International Conference on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006; pp. 730–736. [Google Scholar]
- Mahadevan, K.; Kannan, P. Comprehensive learning particle swarm optimization for reactive power dispatch. Appl. Soft Comput. 2010, 10, 641–652. [Google Scholar] [CrossRef]
- Kamel, S.; Abdel-Fatah, S.; Ebeed, M.; Yu, J.; Xie, K.; Zhao, C. Solving optimal reactive power dispatch problem considering load uncertainty. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 1335–1340. [Google Scholar]
- Khazali, A.; Kalantar, M. Optimal reactive power dispatch based on harmony search algorithm. Int. J. Electr. Power Energy Syst. 2011, 33, 684–692. [Google Scholar] [CrossRef]
- Mandal, B.; Roy, P.K. Optimal reactive power dispatch using quasi-oppositional teaching learning based optimization. Int. J. Electr. Power Energy Syst. 2013, 53, 123–134. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhyay, P.K. Solution of optimal reactive power flow using biogeography-based optimization. Int. J. Electr. Electron. Eng. 2010, 4, 568–576. [Google Scholar]
- Duman, S.; Sönmez, Y.; Güvenç, U.; Yörükeren, N. Optimal reactive power dispatch using a gravitational search algorithm. IET Gener. Transm. Distrib. 2012, 6, 563–576. [Google Scholar] [CrossRef]
- Chen, G.; Liu, L.; Zhang, Z.; Huang, S. Optimal reactive power dispatch by improved GSA-based algorithm with the novel strategies to handle constraints. Appl. Soft Comput. 2017, 50, 58–70. [Google Scholar] [CrossRef]
- Abdel-Fatah, S.; Ebeed, M.; Kamel, S.; Yu, J. Reactive Power Dispatch Solution with Optimal Installation of Renewable Energy Resources Considering Uncertainties. In Proceedings of the 2019 IEEE Conference on Power Electronics and Renewable Energy (CPERE), Aswan City, Egypt, 23–25 October 2019; pp. 118–123. [Google Scholar]
- Abdel-Fatah, S.; Ebeed, M.; Kamel, S. Optimal reactive power dispatch using modified sine cosine algorithm. In Proceedings of the 2019 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 2–4 February 2019; pp. 510–514. [Google Scholar]
- Heidari, A.A.; Abbaspour, R.A.; Jordehi, A.R. Gaussian bare-bones water cycle algorithm for optimal reactive power dispatch in electrical power systems. Appl. Soft Comput. 2017, 57, 657–671. [Google Scholar] [CrossRef]
- Sahli, Z.; Hamouda, A.; Bekrar, A.; Trentesaux, D. Reactive Power Dispatch Optimization with Voltage Profile Improvement Using an Efficient Hybrid Algorithm. Energies 2018, 11, 2134. [Google Scholar] [CrossRef] [Green Version]
- Shargh, S.; Mohammadi-Ivatloo, B.; Seyedi, H.; Abapour, M. Probabilistic multi-objective optimal power flow considering correlated wind power and load uncertainties. Renew. Energy 2016, 94, 10–21. [Google Scholar] [CrossRef]
- Atwa, Y.; El-Saadany, E.; Salama, M.; Seethapathy, R. Optimal renewable resources mix for distribution system energy loss minimization. IEEE Trans. Power Syst. 2009, 25, 360–370. [Google Scholar] [CrossRef]
- Soroudi, A.; Amraee, T. Decision making under uncertainty in energy systems: State of the art. Renew. Sustain. Energy Rev. 2013, 28, 376–384. [Google Scholar] [CrossRef]
- Karuppiah, R.; Martin, M.; Grossmann, I.E. A simple heuristic for reducing the number of scenarios in two-stage stochastic programming. Comput. Chem. Eng. 2010, 34, 1246–1255. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L.A. Fuzzy sets. Inf. Control. 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Aien, M.; Rashidinejad, M.; Fotuhi-Firuzabad, M. On possibilistic and probabilistic uncertainty assessment of power flow problem: A review and a new approach. Renew. Sustain. Energy Reviews 2014, 37, 883–895. [Google Scholar] [CrossRef]
- Ben-Haim, Y. Info-Gap Decision Theory: Decisions under Severe Uncertainty; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Nazari-Heris, M.; Mohammadi-Ivatloo, B. Application of robust optimization method to power system problems. In Classical and Recent Aspects of Power System Optimization; Elsevier: Amsterdam, The Netherlands, 2018; pp. 19–32. [Google Scholar]
- Moore, R.E.; Kearfott, R.B.; Cloud, M.J. Introduction to Interval Analysis; SIAM: Philadelphia, PA, USA, 2009. [Google Scholar]
- Sharma, N. Stochastic techniques used for optimization in solar systems: A review. Renew. Sustain. Energy Rev. 2012, 16, 1399–1411. [Google Scholar] [CrossRef]
- Bui, V.-H.; Hussain, A.; Kim, H.-M. Double Deep $ Q $-Learning-Based Distributed Operation of Battery Energy Storage System Considering Uncertainties. IEEE Trans. Smart Grid 2019, 11, 457–469. [Google Scholar] [CrossRef]
- Martinez-Mares, A.; Fuerte-Esquivel, C.R. A robust optimization approach for the interdependency analysis of integrated energy systems considering wind power uncertainty. IEEE Trans. Power Syst. 2013, 28, 3964–3976. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine predators algorithm: A nature-inspired Metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Al-Qaness, M.A.; Ewees, A.A.; Fan, H.; Abualigah, L.; Abd Elaziz, M. Marine Predators Algorithm for Forecasting Confirmed Cases of COVID-19 in Italy, USA, Iran and Korea. Int. J. Environ. Res. Public Health 2020, 17, 3520. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Elhoseny, M.; Chakrabortty, R.K.; Ryan, M. A Hybrid COVID-19 Detection Model Using an Improved Marine Predators Algorithm and a Ranking-Based Diversity Reduction Strategy. IEEE Access 2020, 8, 79521–79540. [Google Scholar] [CrossRef]
- Soroudi, A.; Aien, M.; Ehsan, M. A probabilistic modeling of photo voltaic modules and wind power generation impact on distribution networks. IEEE Syst. J. 2011, 6, 254–259. [Google Scholar] [CrossRef] [Green Version]
- Mohseni-Bonab, S.M.; Rabiee, A. Optimal reactive power dispatch: A review, and a new stochastic voltage stability constrained multi-objective model at the presence of uncertain wind power generation. IET Gener. Transm. Distrib. 2017, 11, 815–829. [Google Scholar] [CrossRef]
- Boyle, G. Renewable Energy, no. Sirsi I9780199261789; Open University: Milton Keynes, UK, 2004. [Google Scholar]
- Hetzer, J.; David, C.Y.; Bhattarai, K. An economic dispatch model incorporating wind power. IEEE Trans. Energy Convers. 2008, 23, 603–611. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.N.; Mallipeddi, R.; Amaratunga, G.A.J. Optimal reactive power dispatch with uncertainties in load demand and renewable energy sources adopting scenario-based approach. Appl. Soft Comput. 2019, 75, 616–632. [Google Scholar] [CrossRef]
- Salameh, Z.M.; Borowy, B.S.; Amin, A.R. Photovoltaic module-site matching based on the capacity factors. IEEE Trans. Energy Convers. 1995, 10, 326–332. [Google Scholar] [CrossRef]
- Liang, R.-H.; Liao, J.-H. A fuzzy-optimization approach for generation scheduling with wind and solar energy systems. IEEE Trans. Power Syst. 2007, 22, 1665–1674. [Google Scholar] [CrossRef]
- Reddy, S.S.; Bijwe, P.; Abhyankar, A.R. Real-time economic dispatch considering renewable power generation variability and uncertainty over scheduling period. IEEE Syst. J. 2014, 9, 1440–1451. [Google Scholar] [CrossRef]
- Humphries, N.E.; Queiroz, N.; Dyer, J.R.; Pade, N.G.; Musyl, M.K.; Schaefer, K.M.; Fuller, D.W.; Brunnschweiler, J.M.; Doyle, T.K.; Houghton, J.D. Environmental context explains Lévy and Brownian movement patterns of marine predators. Nature 2010, 465, 1066–1069. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dutta, S.; Roy, P.K.; Nandi, D. Optimal location of STATCOM using chemical reaction optimization for reactive power dispatch problem. Ain Shams Eng. J. 2016, 7, 233–247. [Google Scholar] [CrossRef] [Green Version]
- Mandal, S.; Mandal, K.; Kumar, S. A new optimization technique for optimal reactive power scheduling using Jaya algorithm. In Proceedings of the 2017 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 21–22 April 2017; pp. 1–5. [Google Scholar]
- Rajan, A.; Malakar, T.; Systems, E. Optimal reactive power dispatch using hybrid Nelder–Mead simplex based firefly algorithm. Int. J. Electr. Power 2015, 66, 9–24. [Google Scholar] [CrossRef]
- Polprasert, J.; Ongsakul, W.; Dieu, V.N. Optimal reactive power dispatch using improved pseudo-gradient search particle swarm optimization. Electr. Power Compon. 2016, 44, 518–532. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Scenario | Loading % | |
| 1 | 0.1587 | 96.9482 |
| 2 | 0.6826 | 100 |
| 3 | 0.1587 | 103.0518 |
| Wind Scenario | Wind Speed % | |
| 1 | 0.3 | 0 |
| 2 | 0.6 | 50 |
| 3 | 0.1 | 100 |
| Irradiance Scenario | Solar Irradiance % | |
| 1 | 0.4 | 0 |
| 2 | 0.50 | 50 |
| 3 | 0.1 | 100 |
| Control Variables | Min. | Max. | ||
|---|---|---|---|---|
| Generator Voltage | ||||
| V1 (p.u) | 1.1 | 0.9 | 1.1000 | 0.9971 |
| V2 (p.u) | 1.1 | 0.9 | 1.0949 | 0.9959 |
| V5 (p.u) | 1.1 | 0.9 | 1.0761 | 1.0164 |
| V8 (p.u) | 1.1 | 0.9 | 1.0780 | 0.9971 |
| V11 (p.u) | 1.1 | 0.9 | 1.0873 | 1.0387 |
| V13 (p.u) | 1.1 | 0.9 | 1.1000 | 1.0251 |
| Transformer Tap Ratio | ||||
| T11 | 1.1 | 0.9 | 0.9807 | 1.0556 |
| T12 | 1.1 | 0.9 | 1.0222 | 1.0180 |
| T15 | 1.1 | 0.9 | 0.9765 | 1.0230 |
| T36 | 1.1 | 0.9 | 0.9707 | 0.9676 |
| Capacitor Banks | ||||
| Q10 (p.u) | 0.05 | 0 | 0.0179 | 0.0450 |
| Q12 (p.u) | 0.05 | 0 | 0.0483 | 0.0497 |
| Q15 (p.u) | 0.05 | 0 | 0.0397 | 0.0499 |
| Q17 (p.u) | 0.05 | 0 | 0.0499 | 0.0240 |
| Q20 (p.u) | 0.05 | 0 | 0.0422 | 0.0463 |
| Q21 (p.u) | 0.05 | 0 | 0.0461 | 0.0499 |
| Q23 (p.u) | 0.05 | 0 | 0.0469 | 0.0426 |
| Q24 (p.u) | 0.05 | 0 | 0.0412 | 0.0499 |
| Q29 (p.u) | 0.05 | 0 | 0.0329 | 0.0193 |
| Objective Function | ||||
| 4.5335 | 6.11680 | |||
| 2.06573 | 0.08514 | |||
| Algorithm | Best | Worst | Mean |
|---|---|---|---|
| MPA | 4.5335 | 4.6006 | 4.55389 |
| JA [56] | 4.625 | NA | NA |
| ALO [10] | 4.5900 | NA | NA |
| HSA [22] | 4.9059 | 4.9653 | 4.924 |
| PSO [22] | 4.9239 | 5.0576 | 4.972 |
| STGA [22] | 4.9408 | 5.1651 | 5.0378 |
| TLBO [23] | 4.5629 | 4.57480 | 4.56950 |
| QOTLBO [23] | 4.5594 | 4.56170 | 4.56010 |
| DE [15] | 4.5550 | NA | NA |
| SGA [16] | 4.5692 | NA | NA |
| FA [57] | 4.5691 | 4.59 | 4.578 |
| HPSO-TS [30] | 4.5213 | NA | NA |
| TS [30] | 4.9203 | NA | NA |
| PSO [30] | 4.6862 | NA | NA |
| WOA [11] | 4.5943 | NA | NA |
| PSO-TVAC [11] | 4.6469 | NA | NA |
| IDE [18] | 4.5521 | NA | NA |
| BBO [24] | 4.5511 | NA | NA |
| CLPSO [20] | 4.6282 | NA | NA |
| PSO [20] | 4.5615 | NA | NA |
| GSA [26] | 5.00954 | NA | NA |
| PSO [26] | 4.91578 | NA | NA |
| GSA-CSS [26] | 4.79301 | NA | NA |
| IGSA-CSS [26] | 4.76601 | NA | NA |
| Algorithm | Best | Worst | Mean |
|---|---|---|---|
| MPA | 0.08513 | 0.09900 | 0.09454 |
| QOTLBO [23] | 0.0856 | 0.0907 | 0.0872 |
| TLBO [23] | 0.0913 | 0.0988 | 0.0934 |
| PSO-TVIW [58] | 0.1038 | 0.5791 | 0.1597 |
| PSO-TVA [58] | 0.2064 | 0.5796 | 0.2376 |
| SPSO-TVAC [58] | 0.1354 | 0.1833 | 0.1558 |
| PSO-CF [58] | 0.1287 | 0.4041 | 0.1557 |
| PG-PSO [58] | 0.1202 | 0.2593 | 0.1440 |
| SWT-PSO [58] | 0.1614 | 0.2296 | 0.1814 |
| IPG-PSO [58] | 0.0892 | 0.2518 | 0.1078 |
| DE [15] | 0.0911 | NA | NA |
| ISSO [12] | 0.08847 | 0.14938 | 0.11603 |
| SSO [12] | 0.19304 | 0.42681 | 0.2863 |
| HSSSA [12] | 0.174701 | 0.576439 | 0.308337 |
| MSSA [12] | 0.230087 | 1.860037 | 0.690254 |
| SSA [12] | 0.188411 | 0.941759 | 0.374529 |
| CSA [12] | 0.12692 | 0.2076 | 0.16432 |
| IALO [13] | 0.0881 | NA | 0.1012 |
| ALO [13] | 0.1192 | NA | 0.1575 |
| GSA [26] | 0.17241 | NA | NA |
| PSO [26] | 0.10462 | NA | NA |
| GSA-CSS [26] | 0.12394 | NA | NA |
| IGSA-CSS [26] | 0.08968 | NA | NA |
| Scenario | Loading % | Solar Irradiance % | Wind Speed % | ||||
|---|---|---|---|---|---|---|---|
| 96.9482 | 0 | 0 | 0.1587 | 0.4 | 0.3 | 0.0190 | |
| 96.9482 | 0 | 50 | 0.1587 | 0.4 | 0.6 | 0.0381 | |
| 96.9482 | 0 | 100 | 0.1587 | 0.4 | 0.1 | 0.0063 | |
| 96.9482 | 50 | 0 | 0.1587 | 0.5 | 0.3 | 0.0238 | |
| 96.9482 | 50 | 50 | 0.1587 | 0.5 | 0.6 | 0.0476 | |
| 96.9482 | 50 | 100 | 0.1587 | 0.5 | 0.1 | 0.0079 | |
| 96.9482 | 100 | 0 | 0.1587 | 0.1 | 0.3 | 0.0048 | |
| 96.9482 | 100 | 50 | 0.1587 | 0.1 | 0.6 | 0.0095 | |
| 96.9482 | 100 | 100 | 0.1587 | 0.1 | 0.1 | 0.0016 | |
| 100 | 0 | 0 | 0.6826 | 0.4 | 0.3 | 0.0819 | |
| 100 | 0 | 50 | 0.6826 | 0.4 | 0.6 | 0.1638 | |
| 100 | 0 | 100 | 0.6826 | 0.4 | 0.1 | 0.0273 | |
| 100 | 50 | 0 | 0.6826 | 0.5 | 0.3 | 0.1024 | |
| 100 | 50 | 50 | 0.6826 | 0.5 | 0.6 | 0.2048 | |
| 100 | 50 | 100 | 0.6826 | 0.5 | 0.1 | 0.0341 | |
| 100 | 100 | 0 | 0.6826 | 0.1 | 0.3 | 0.0205 | |
| 100 | 100 | 50 | 0.6826 | 0.1 | 0.6 | 0.0410 | |
| 100 | 100 | 100 | 0.6826 | 0.1 | 0.1 | 0.0068 | |
| 103.0518 | 0 | 0 | 0.1587 | 0.4 | 0.3 | 0.0190 | |
| 103.0518 | 0 | 50 | 0.1587 | 0.4 | 0.6 | 0.0381 | |
| 103.0518 | 0 | 100 | 0.1587 | 0.4 | 0.1 | 0.0063 | |
| 103.0518 | 50 | 0 | 0.1587 | 0.5 | 0.3 | 0.0238 | |
| 103.0518 | 50 | 50 | 0.1587 | 0.5 | 0.6 | 0.0476 | |
| 103.0518 | 50 | 100 | 0.1587 | 0.5 | 0.1 | 0.0079 | |
| 103.0518 | 100 | 0 | 0.1587 | 0.1 | 0.3 | 0.0048 | |
| 103.0518 | 100 | 50 | 0.1587 | 0.1 | 0.6 | 0.0095 | |
| 103.0518 | 100 | 100 | 0.1587 | 0.1 | 0.1 | 0.0016 |
| Scenario | |||||
|---|---|---|---|---|---|
| 0 | 0 | 11.0584 | 0.0190 | 0.2101 | |
| 0 | 28.8462 | 7.4343 | 0.0381 | 0.2832 | |
| 0 | 75.0000 | 4.2777 | 0.0063 | 0.0269 | |
| 25 | 0 | 8.4741 | 0.0238 | 0.2017 | |
| 25 | 28.8462 | 5.4973 | 0.0476 | 0.2617 | |
| 25 | 75.0000 | 3.1696 | 0.0079 | 0.0250 | |
| 50 | 0 | 6.6682 | 0.0048 | 0.0320 | |
| 50 | 28.8462 | 4.4733 | 0.0095 | 0.0425 | |
| 50 | 75.0000 | 2.6388 | 0.0016 | 0.0042 | |
| 0 | 0 | 10.4350 | 0.0819 | 0.8546 | |
| 0 | 28.8462 | 7.4520 | 0.1638 | 1.2206 | |
| 0 | 75.0000 | 4.9558 | 0.0273 | 0.1353 | |
| 25 | 0 | 8.4523 | 0.1024 | 0.8655 | |
| 25 | 28.8462 | 5.8801 | 0.2048 | 1.2042 | |
| 25 | 75.0000 | 3.3202 | 0.0341 | 0.1132 | |
| 50 | 0 | 7.0750 | 0.0205 | 0.1450 | |
| 50 | 28.8462 | 4.7426 | 0.0410 | 0.1944 | |
| 50 | 75.0000 | 2.4981 | 0.0068 | 0.0170 | |
| 0 | 0 | 11.4607 | 0.0190 | 0.2178 | |
| 0 | 28.8462 | 9.0704 | 0.0381 | 0.3456 | |
| 0 | 75.0000 | 6.4350 | 0.0063 | 0.0405 | |
| 25 | 0 | 9.1914 | 0.0238 | 0.2188 | |
| 25 | 28.8462 | 6.9738 | 0.0476 | 0.3320 | |
| 25 | 75.0000 | 4.3080 | 0.0079 | 0.0340 | |
| 50 | 0 | 7.9091 | 0.0048 | 0.0380 | |
| 50 | 28.8462 | 5.5830 | 0.0095 | 0.0530 | |
| 50 | 75.0000 | 3.3066 | 0.0016 | 0.0053 | |
| TEPL = 7.1223 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ebeed, M.; Alhejji, A.; Kamel, S.; Jurado, F. Solving the Optimal Reactive Power Dispatch Using Marine Predators Algorithm Considering the Uncertainties in Load and Wind-Solar Generation Systems. Energies 2020, 13, 4316. https://doi.org/10.3390/en13174316
Ebeed M, Alhejji A, Kamel S, Jurado F. Solving the Optimal Reactive Power Dispatch Using Marine Predators Algorithm Considering the Uncertainties in Load and Wind-Solar Generation Systems. Energies. 2020; 13(17):4316. https://doi.org/10.3390/en13174316
Chicago/Turabian StyleEbeed, Mohamed, Ayman Alhejji, Salah Kamel, and Francisco Jurado. 2020. "Solving the Optimal Reactive Power Dispatch Using Marine Predators Algorithm Considering the Uncertainties in Load and Wind-Solar Generation Systems" Energies 13, no. 17: 4316. https://doi.org/10.3390/en13174316
APA StyleEbeed, M., Alhejji, A., Kamel, S., & Jurado, F. (2020). Solving the Optimal Reactive Power Dispatch Using Marine Predators Algorithm Considering the Uncertainties in Load and Wind-Solar Generation Systems. Energies, 13(17), 4316. https://doi.org/10.3390/en13174316