1. Introduction
India is an agriculture-based developing country with its major economic contribution from the agriculture sector. Around 70% of the farming area is dependent on irrigation in rural areas. This is because monsoon-based cultivation cannot cater the huge demand. According to the All India Crop Estimation Survey Report 2013-14, above 85% of the farming land is irrigated by the ground water irrigation system, and the rest is dependent on surface-water irrigation system. Generally, sources of electric power and diesel engines are used for irrigation to drive motor pumps, but these sources of energy are still not sufficient to fulfill the demand. With unlimited usage of motor drives, the energy demand is increasing worldwide leading to a burden on conventional sources of energy. However, the depletion of conventional sources of energy has attracted power generation from solar and wind [
1,
2,
3]. Of these, solar energy is considered to be more effective as harnessing of solar is much easier than wind power. With limited access to electricity in rural areas, solar-powered irrigation systems may serve as an alternative for irrigation in off-grid areas. Additionally, the Ministry of New and Renewable Energy (MNRE), Government of India supports installation of solar systems in India with attractive incentives, so that PV modules are now affordable with the relevant subsidies.
However, the low output voltage of PV systems is a matter of concern for motor-pump applications. To cater for this difficulty, a PV input source is fed through configurations of DC-DC converter to step up the low voltage of the PV output. Various configurations of PV-fed dc-dc converters were discussed in [
4]. This paper [
4] presented a comparative analysis of cascaded converter topologies for PV systems. The outputs of these converters are fed through inverters to ac motor drives utilized in pumping applications. Nevertheless, these converters are not sufficient to cater to the higher voltage output requirement of motor drive applications. Moreover, single-stage power conversion is not supported by the conventional converter-inverter topologies which is an essential aspect of economical design. This problems can be overcome by impedance-source inverters (abbreviated as Z-source inverter, ZSI) [
5,
6,
7,
8]. It provides extended output-voltage range, lower harmonic distortion, and high power factor. With the aforementioned advantages, the ZSI module is desirable for PV fed motor-drive systems for pumping applications. Studies in [
9,
10,
11] show the behavior analysis of impedance networks for PV systems. The Z-source inverter topology is suitable to achieve maximum power point tracking in applications utilizing photovolatics without affecting the gain of Z-source inverter operation. The suitability of the Z-source inverter is also explored in detail in [
12]. The proposed control in [
12] ensures the simultaneous operation of the given topology integrated with the three-Level Neutral Point Clamped(NPC) Inverter in buck-boost mode and induction motor control. Moreover, several topologies of Z-source inverter are proved to be suitable for high gain output requirements such as electric vehicles [
13] and induction motor drives [
14]. The converter possesses a good tracking of the reference voltage and disturbance-rejection characteristics.
However, the operation of these drives is prone to get affected by potentially high risks factors. Once such factor, as suggested by the results from industry statistics, is switch faults leading to permanent failures of power switching devices. The most common switch faults in inverter modules are open-circuit and short-circuit faults. The adverse effects of switch faults on motor drive systems were thoroughly discussed in [
15]. Thus, the reliability of operation for such drives is questionable under the absence of an efficient fault-tolerant scheme. The need of fault-tolerance becomes more prominent in the case of renewable-sources-fed electric-motor drives. Various modified topologies are suggested depending on the nature of the applications. Some of the fault-tolerant strategies are feasible for open-circuit or short-circuit faults, and the literature also discussed other topologies for multiple faults. In [
16,
17,
18] the fault-tolerant strategies towards these faults are discussed for conventional converter circuits. These topologies provide wider control for fault detection and diagnosis. A few more studies [
19,
20,
21,
22,
23,
24,
25,
26,
27,
28] suggested protection methods and fault diagnosis techniques for switch faults. However, the characteristics like complexity of control schemes, high cost of operation and longer detection time makes them unsuitable for irrigation application. A comprehensive review of fault-tolerant techniques was presented in [
29,
30,
31,
32,
33]. Among the suggested methods, addition of a redundant leg enables efficient control during fault-tolerant operation. The above literature review suggested that the motor-driven solar water pumping system should be fed through an high-gain economical power conversion arrangement to reduce cost of the system. In addition to it, the proposed system should be equipped with an effective fault-tolerant scheme which should compensate for switch failures occurred in the inverter module. This arrangement eliminates the risk of reduced volume of water during long-hours operation for irrigation in rural areas.
The major contributions of this paper are summarized as follows:
Design and implementation of a complete efficient irrigation system using a high gain single-stage power conversion, Z-source inverter (ZSI) and a PV system. With the proposed modulation strategy, the ZSI can use higher modulation index with lower voltage stress across the switching devices as compared to the existed noncoupled impedance networks.
Develop a fast fault-tolerant control algorithm and control measures to facilitate continuous operation during the event of a fault. The fault-diagnosis is achieved effectively within 20 ms while maintaining nearly rated power during post-fault operation.
Analyze the performance parameters of the proposed system to verify its compatibility for irrigation applications.
In light of the above, an efficient motor-drive system with fault-tolerant capability is proposed in this paper. With operation at high modulation index, the proposed system has improved power quality. Moreover, it proves to be an economical solution with less devices required. The economical feature makes this topology affordable to users in rural areas. The response of fault-tolerant control schemes under open-circuit and short-circuit faults is investigated for irrigation application. The fault diagnosis is performed very quickly. In addition to it, due to presence of PV source with battery storage systems, the pumping operation is independent of frequent power outage and variations in weather conditions.
The remainder of this paper is organized into the following sections. The design of the PV array, Z-source network and motor specifications for water-pump are described in
Section 2.
Section 3 describes the proposed fault-tolerant strategy for the system under the faulty modes. The methods of fault detection and flow of fault compensation control scheme are thoroughly explained in this section. The relevant simulation results under normal, faulty and post fault operation are analyzed in
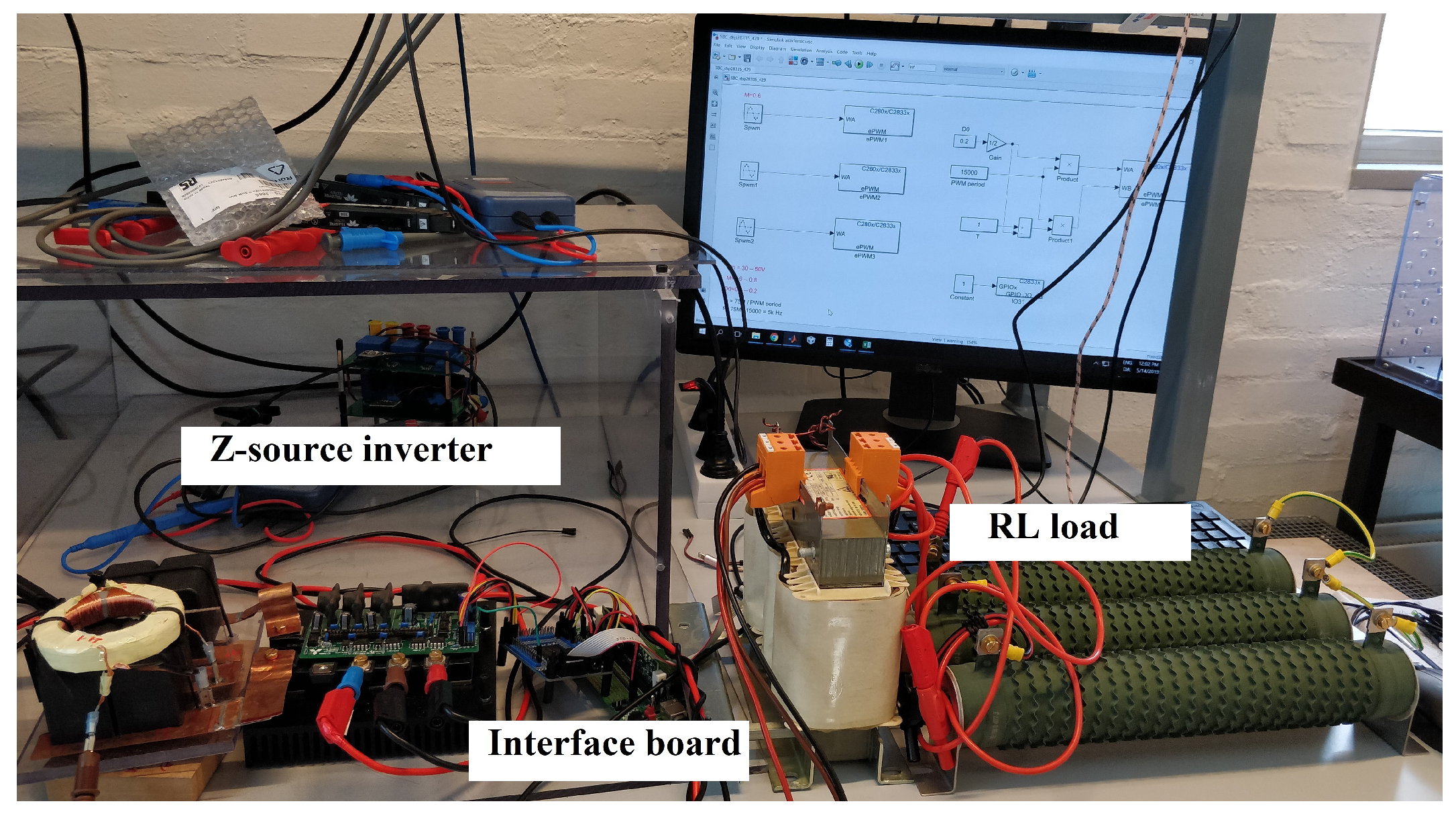
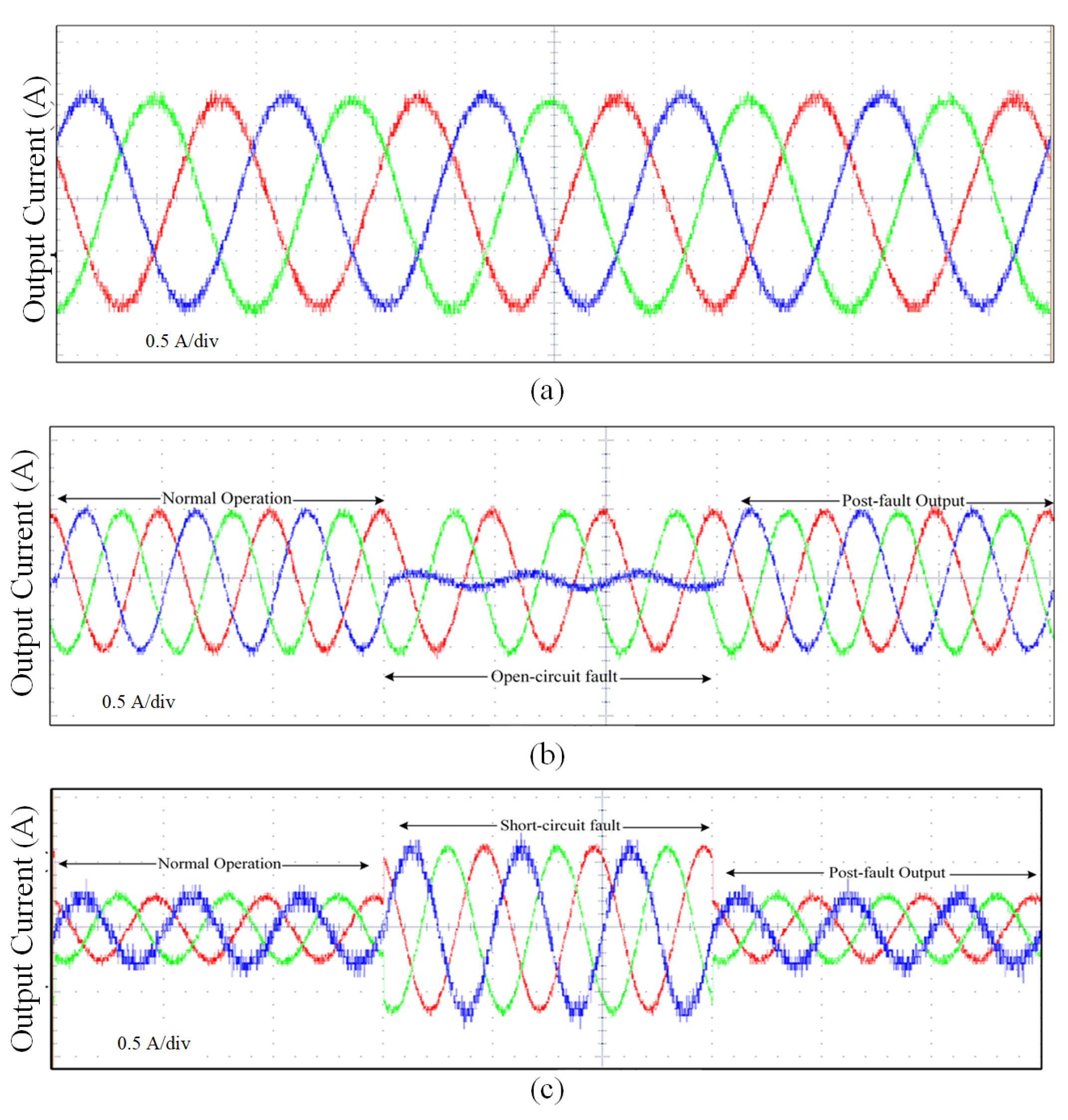
Section 4. Experimental results are presented in
Section 5 which were obtained for a test bench of 1-kW induction motor prototype interfaced through dSPACE. The suitability of the proposed system for the irrigation application is investigated in
Section 6. The obtained results shows the validity and effectiveness of the developed system with fault-tolerant capability for irrigation applications. Finally, a conclusion is presented in
Section 7.
2. System Design Specifications
In the conventional inverter-drive system, the induction-motor drive fed by a PV source operates with two stages of power conversion: The first stage involves conversion of the low DC output of the photovoltaic array to a constant DC by a high gain boost converter, and the second stage incorporates the conversion of a constant DC voltage to a variable voltage and variable frequency supply using VSIs.
In this paper, the two-stage power conversion is replaced by a single-stage conversion with the ZSI topology. It consists of two inductances and two capacitances connected in the X-shape to facilitate the power flow. The circuit diagram of the proposed system is shown in
Figure 1. It consists of the PV source, Z-source inverter for high output voltage gain, and motor-pump arrangement for irrigation application. The PV source acts as input supply for the inverter module. The ZSI network is responsible for supplying the ac power to the motor-pump arrangement. The switching modulation strategies of the inverter module, discussed in later part of the paper, are chosen such that the maximum output is obtained across the load.
2.1. Selection of PV Array Parameters
PV solar cells have nonlinear current-voltage (I-V) characteristics. The output voltage and power vary with the irradiance and temperature. The operating point is derived from the intersection of the load line with the PV voltage-current characteristic [
34,
35,
36,
37]. The PV source was modeled using the characteristic equation:
where
is the PV cell current,
is the cell voltage,
is the photo-current,
is quality factor,
is diode current,
k is Boltzmann constant,
q is the charge of an electron,
is the cell resistance, and
T is the operating temperature in Kelvin.
The detailed design parameters of the Solar PV array are given in
Table 1.
2.2. Z-Source Network
In the proposed modulation scheme, as shown in
Figure 2, the active state is kept intact. It is achieved by implementing a shoot-through state while operating the power semiconductor switch in zero-state. This results in high voltage gain due to independent control operation of the active and shoot-through states. The shoot-through state is applied across all the three arms of the inverter module to minimize the stress on the power switches. The ZSI proves to be suitable for a PV system using the implemented modulation technique. The proposed modulation strategy provides advantage of current sharing and thereby makes the circuit economical, with a requirement of low current rating devices.
In addition to efficient modulation scheme, the selection of inductances and capacitances is vital for single-stage conversion to obtain high voltage gain.
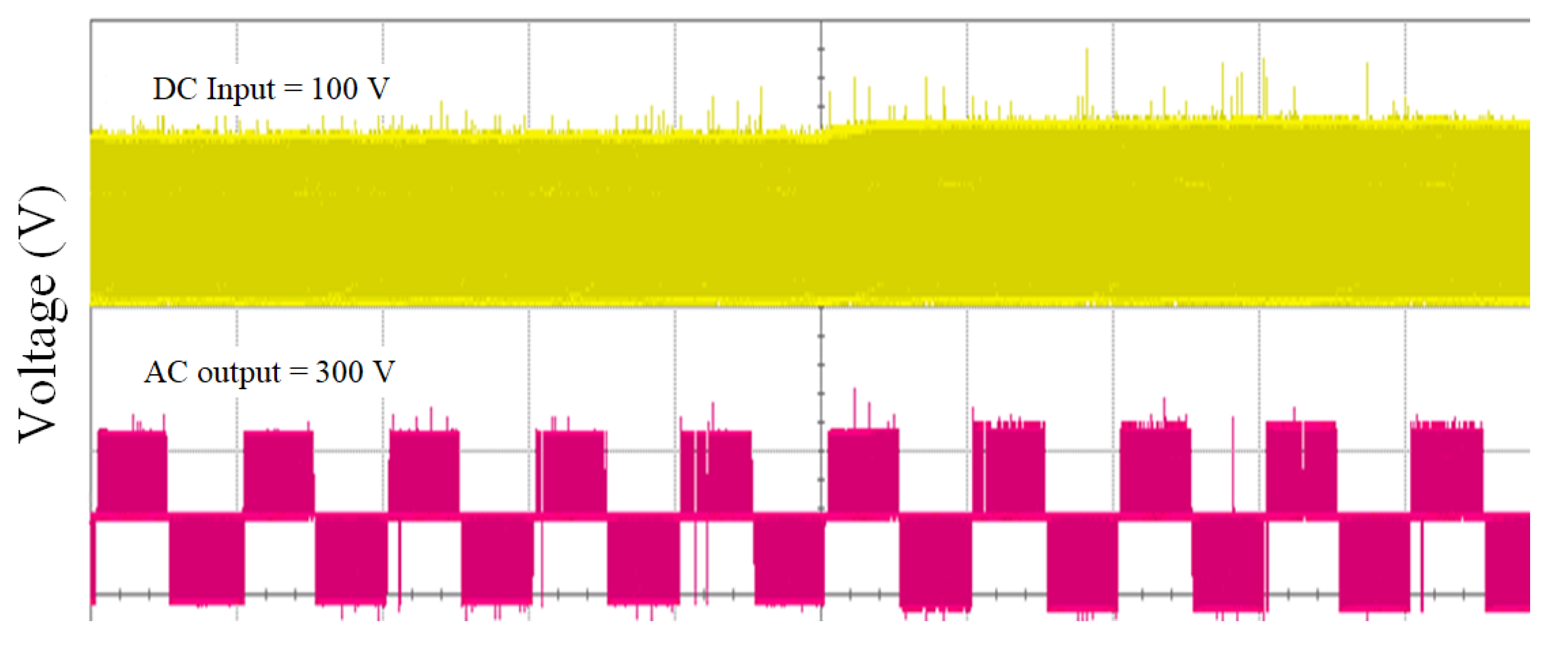
The PV DC voltage and output ac peak voltage are related as [
38]:
where
is the output peak voltage,
B is the boost factor,
M is the modulation index, and
is the
PV output voltage.
Modulation index is calculated as:
where,
is the amplitude of sinusoidal reference waveform and
is the amplitude of triangular waveform.
The boost factor (
B) is expressed as:
The inductor value of the Z-source network is calculated by
where
is the inductor-current ripple. For high gain operation, it should be
%.
The capacitor connected in the impedance source network can be calculated as:
where
is the measure of ripple coefficient of the voltage across capacitor,
is the dc link voltage,
is the peak value of the inductor current and
is the switching frequency.
From Equations (
2)–(
6), the calculated parameters of the Z-source network are given in
Table 2.
2.3. Specifications of Motor-Pump Arrangement
An appropriate design of the induction motor plays a important role in the proposed application of the water-pump arrangement. In order to have sufficient supply of water, the nonlinear relationship between load torque and motor speed is considered. It is given by
where
is load torque,
K is the constant of proportionality of the pump,
is the speed of the motor.
The specifications of the motor are listed in
Table 3.
3. Proposed Fault-Tolerant Strategy
In this paper, the term “fault-tolerant” depicts that the system will continue to operate in a normal satisfactory manner even after the occurrence of fault. The proposed architecture of the utilized fault-tolerant strategy is shown in
Figure 3.
The proposed fault-tolerant topology is suitable for switch failures due to open-circuit and short-circuit faults in the inverter module. The proposed fault-tolerant strategy includes:
- (a)
Fault detection and localization
- (b)
Fault-compensation for post-fault operation
It incorporates an additional redundant leg to facilitate the fault tolerant operation. With regard to the PV-source input, the redundant fault-tolerant topology is utilized using external thyristors to facilitate the transfer of power flow from the faulty leg to the redundant leg. Upon detection of open-circuit fault, the gate signals of the faulty legs are disconnected and the redundant leg is activated. In case of a short-circuit fault, the high-rated fuses safeguard the motor terminals and the the current falls to zero to prevent the motor from being damaged. The redundant leg is normally unused and comes to operation only during the occurrence of the fault.
3.1. Fault Detection and Localization
In order to activate the proposed fault-tolerant strategy, the nature of fault is required to be identified. The fault detection is performed by the measurement of variations in output-current value or the voltage amplitude. Several detection methods for open-circuit and short-circuit faults are suggested in literature [
39,
40,
41]. Upon detection, the location of the fault should be identified. The capability of a system to identify the location of a fault quickly adds to the speedy recovery of the system from the events of the fault.
3.1.1. Open-Circuit Fault Detection
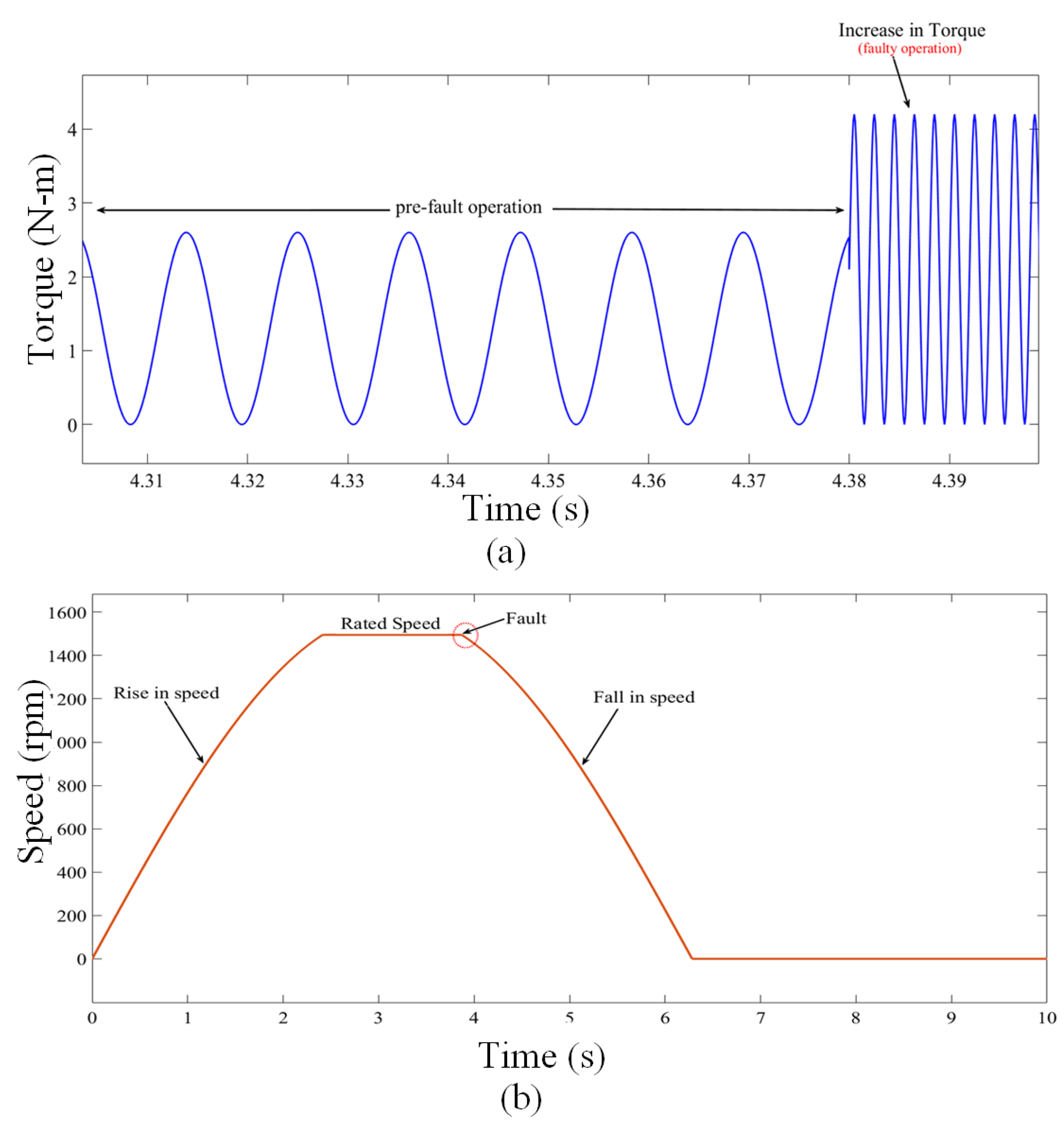
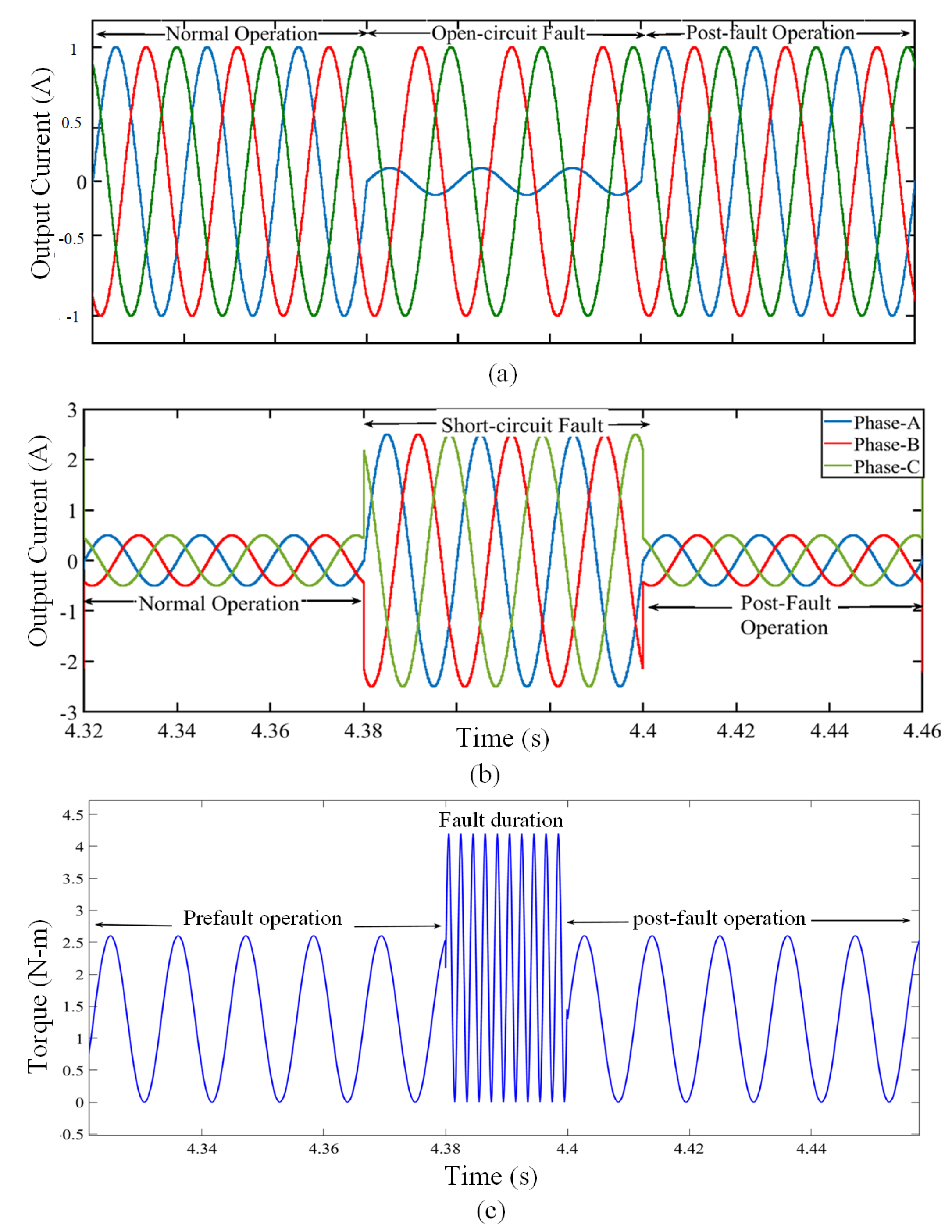
In the faulty mode, huge oscillations are introduced in the
q-axis current which induce high torque ripples in the motor drive. Various detection methods for open-circuit faults are suggested in the literature. Based on the ease of implementation on the experimental prototype, the method of slope measurement of the trajectory of space vector is utilized to detect the open-circuit fault. It involves calculation of slope for the trajectory of space vector during operation based on current measurement of
d-
q axis (
). The slope is defined as:
In this method, the faulty phase is identified using the measured slope from Equation (
8). In order to identify the faulty switch in the faulty phase, the polarity of the phase current is examined. A positive faulty phase current indicates the fault in the lower-switch and a negative faulty phase current indicates the fault in the upper-switch of the faulty leg. The above-mentioned faulty leg and switch detection method is shown in
Table 4.
3.1.2. Short-Circuit Fault Detection
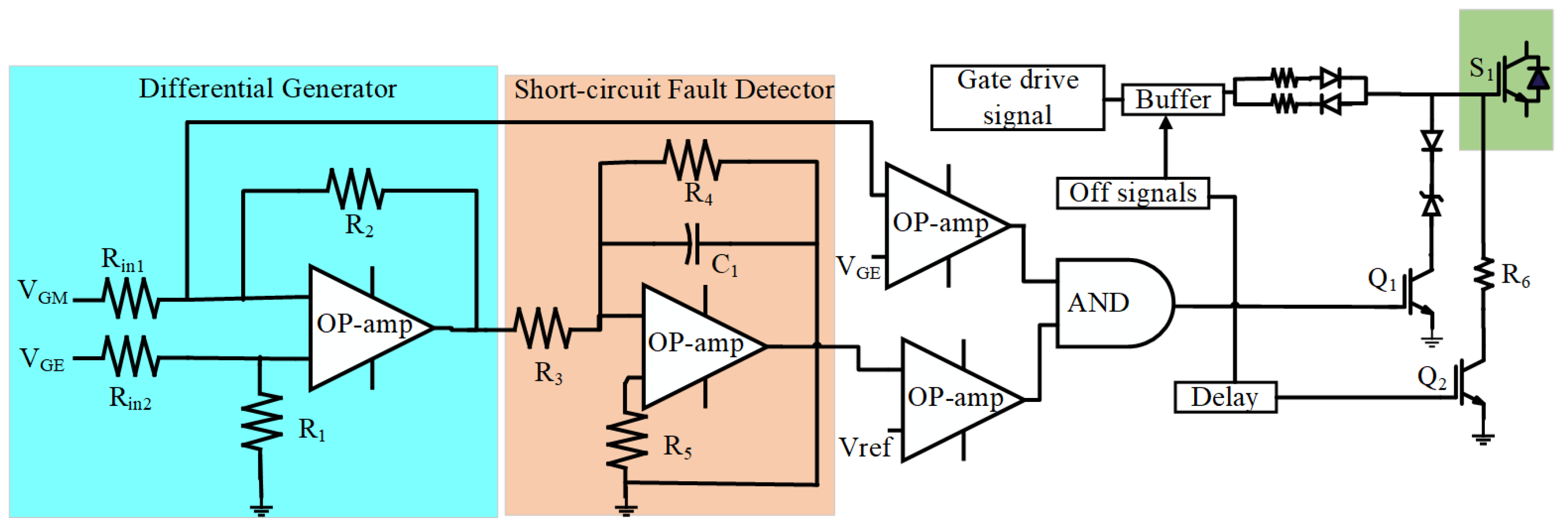
Due to the catastrophic consequences of short-circuit faults, the fault detection and isolation of the faulty leg must be quick. In this paper, the short-circuit fault is detected by gate-voltage compensation method. In this method, the gate voltage is compared with a reference voltage. The circuit diagram of the proposed method for short-circuit fault detection is shown in
Figure 4. The fault detection circuit consists of a differential generator in series with a short-circuit fault detector. It measures the difference between the gate voltage and the reference voltage. In case of a faulty condition, the fault current is reduced by increasing the voltage across the Zener diode. This method is very fast and can be easily integrated to a small IC, which results in lesser size and economical solution to build the experimental prototype.
3.2. Fault Compensation
Once the fault is detected, the fault compensation control scheme should come into the action. The fault compensation signifies that the diagnosis algorithm should be designed in such a way that it brings the system back to the normal operation instead of no-operation in event of fault. In case of the open-circuit faults, the control circuit sends the command and the faulted leg is transferred to the redundant leg (
and
) with corresponding external thyristors (
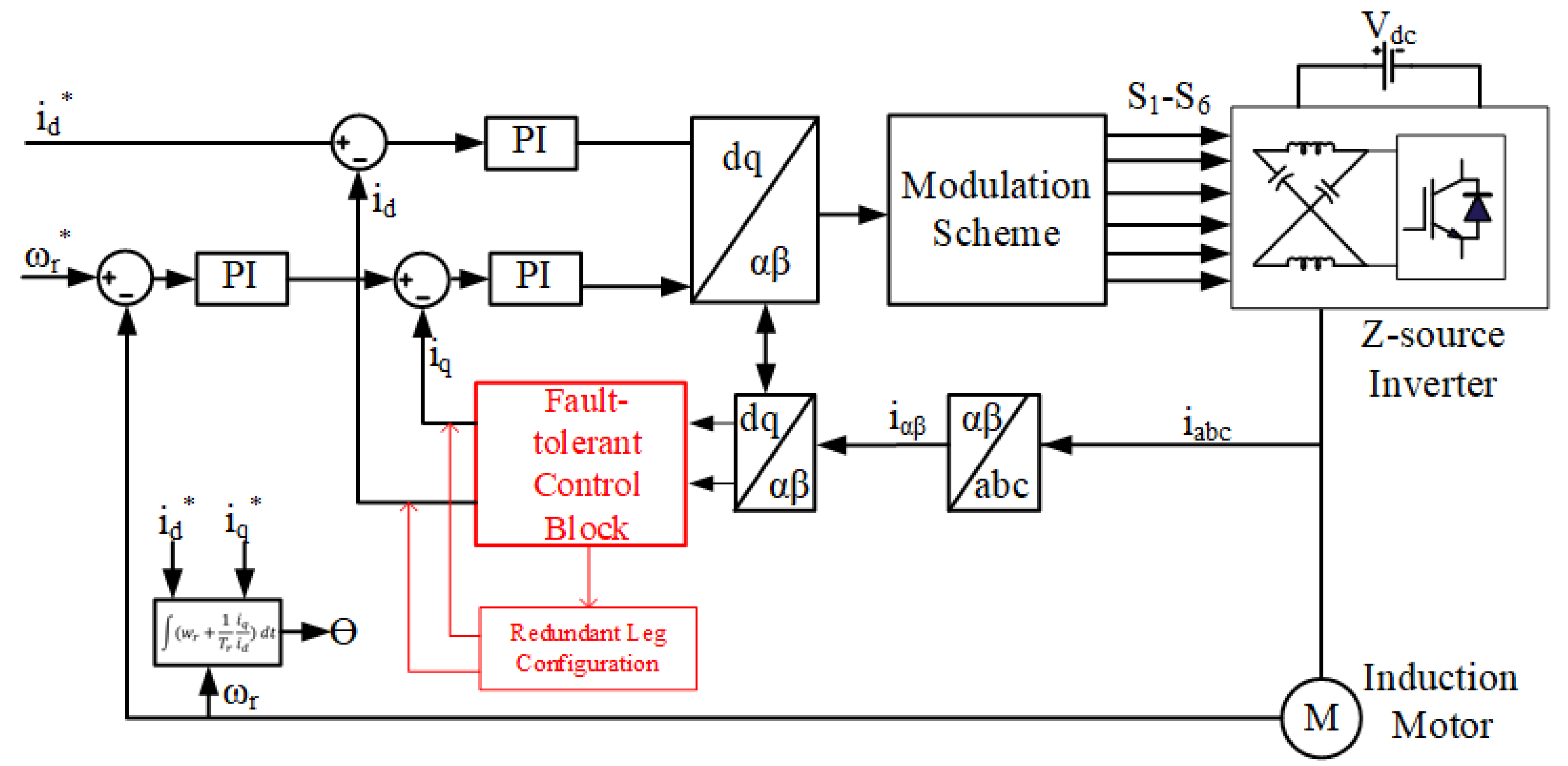
). The fault detection is fast and the motor receives normal current. Similarly, once the short-circuit fault is detected, the hardware protection circuit stops the gate signal to all semiconductor switches and protective high-rating fuses are inserted in the system. The gate signals are transferred to the new leg and motor continues to run the same as in case of prefault conditions. The control scheme to implement the above-mentioned fault-tolerant strategy is shown in
Figure 5.
The proposed fault-tolerant strategy consists of an modulation scheme arrangement, inner-ring current controller, outer-ring speed controller, phase current measurement module of inverter, fault-detection and compensation circuit, and the redundant leg. The
d-q-axis current of the three-phase winding of the motor under normal operation is expressed as follows:
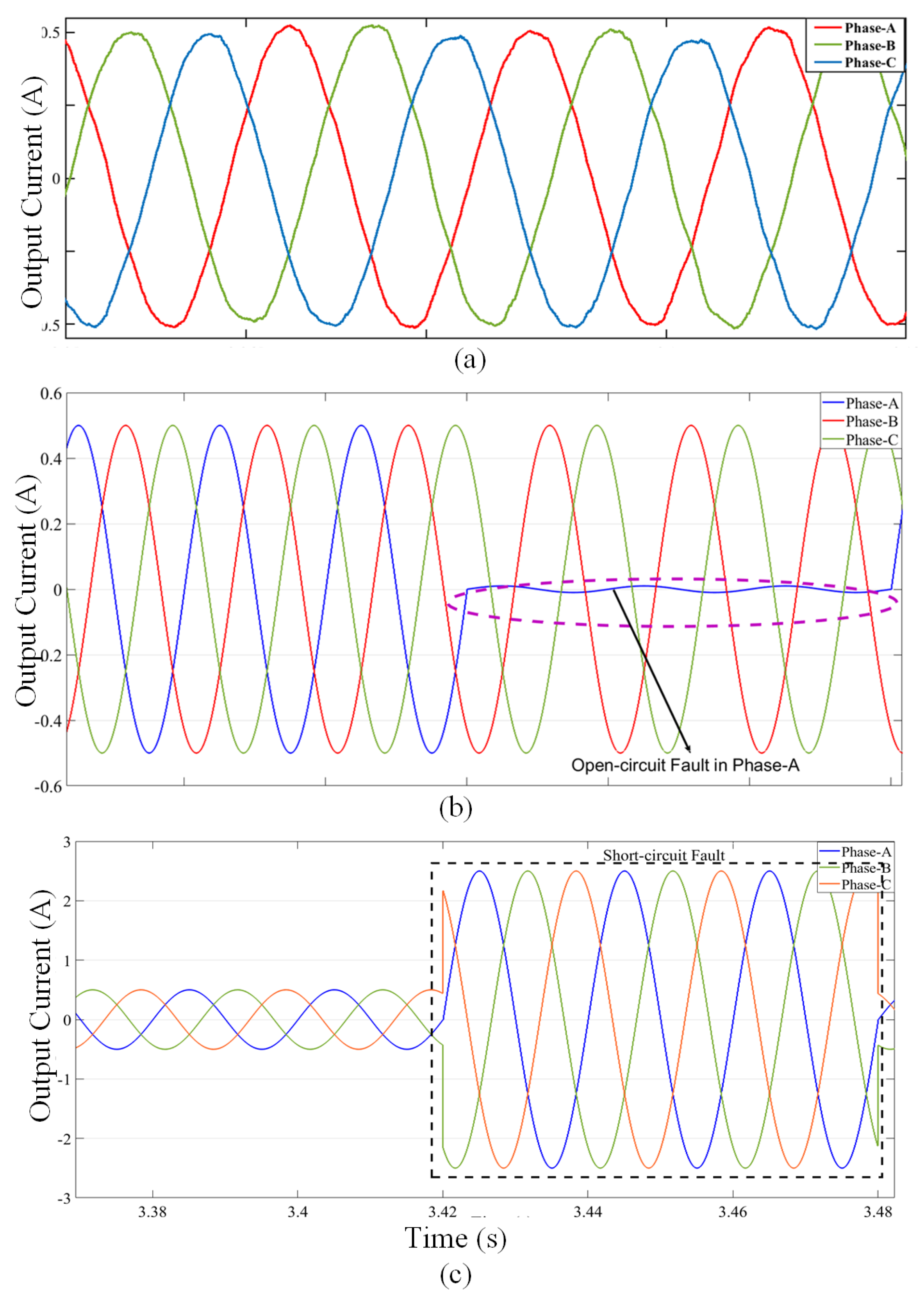
When the phase winding suffers from an open-circuit fault, the current of the respective phase is reduced to zero. In case of fault in phase-A of the winding, the
d-q-axis current changes and is given as:
In the event of open-circuit fault, the motor works in an asymmetric state and the magnetic field will no longer be round rotating magnetic field. It results in drop in the output voltage. In case of motor-drive applications, the fault-tolerant strategy is labelled efficient if it is capable of maintaining the air-gap magnetic field to be round rotating magnetic field. The fault-tolerant control should ensure that voltage vectors are kept constant during the normal and post-fault operation. If a short circuit fault occurs in the switches of phase leg-A, the high rating fuses must blow to prevent the propagation of fault in the system. The fuses are selected based on integral current square rating of the devices. It should be lower than the rated value of power semiconductor switch. Upon detection of fault, the gating signals must be transferred to the redundant arm. For desired operation of motor-pump arrangement, the dip is speed is also considered. The motor speed measurement is performed and the controllers are tuned in such a way that sufficient current is supplied to the faulty-phase in event of the fault. The switch over to the redundant circuit must be quick.
A flowchart depicting the structure of the proposed fault-tolerant control scheme is shown in
Figure 6. The fault detection is relatively fast and ensures immunity from the false alarms.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}