A Powerful Build-Up Rate (BUR) Prediction Method for the Static Push-the-Bit Rotary Steerable System (RSS)

 ,
, 

Abstract
:
1. Introduction
2. Modified RSBHA Mechanical Model
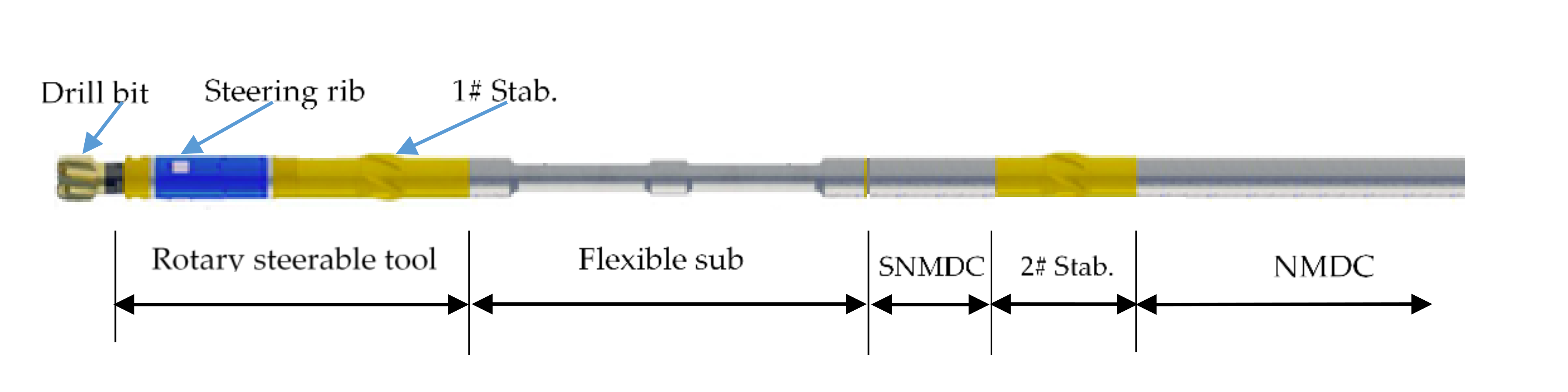
2.1. A Typical Static Push-the-Bit RSBHA
2.2. Basic Assumptions to RSBHA
- (1)
- The total RSBHA is a small elastic deformation system.
- (2)
- The center of a drill bit is located on the wellbore center line.
- (3)
- The weight-on-bit (WOB) is a constant value and along the tangential direction of the wellbore.
- (4)
- Due to the effect of the drill string gravity, the drill string above the upper tangential point lies on the lower side of wellbore.
- (5)
- The wellbore wall is a rigid body and the wellbore size does not change over time.
- (6)
- The contact between the stabilizer and wellbore wall is a point contact.
- (7)
- The effect of rotation and vibration of a drill string is not taken into account.
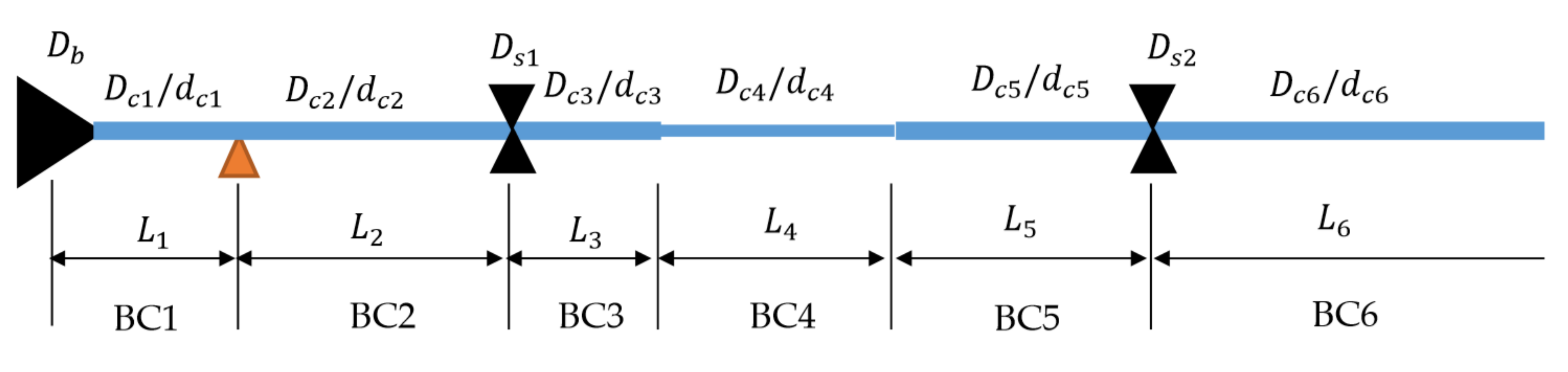
2.3. Equivalent Treatments of the RSBHA
2.4. RSBHA Mechanical Model
2.4.1. Basic Three-Moment Equations to the RSBHA
2.4.2. Supplementary Condition and Equation of the Steering Rib
2.4.3. Supplementary Condition and Equation of the Flexible Sub
2.4.4. Simple Discussion of the 3D RSBHA Mechanical Model
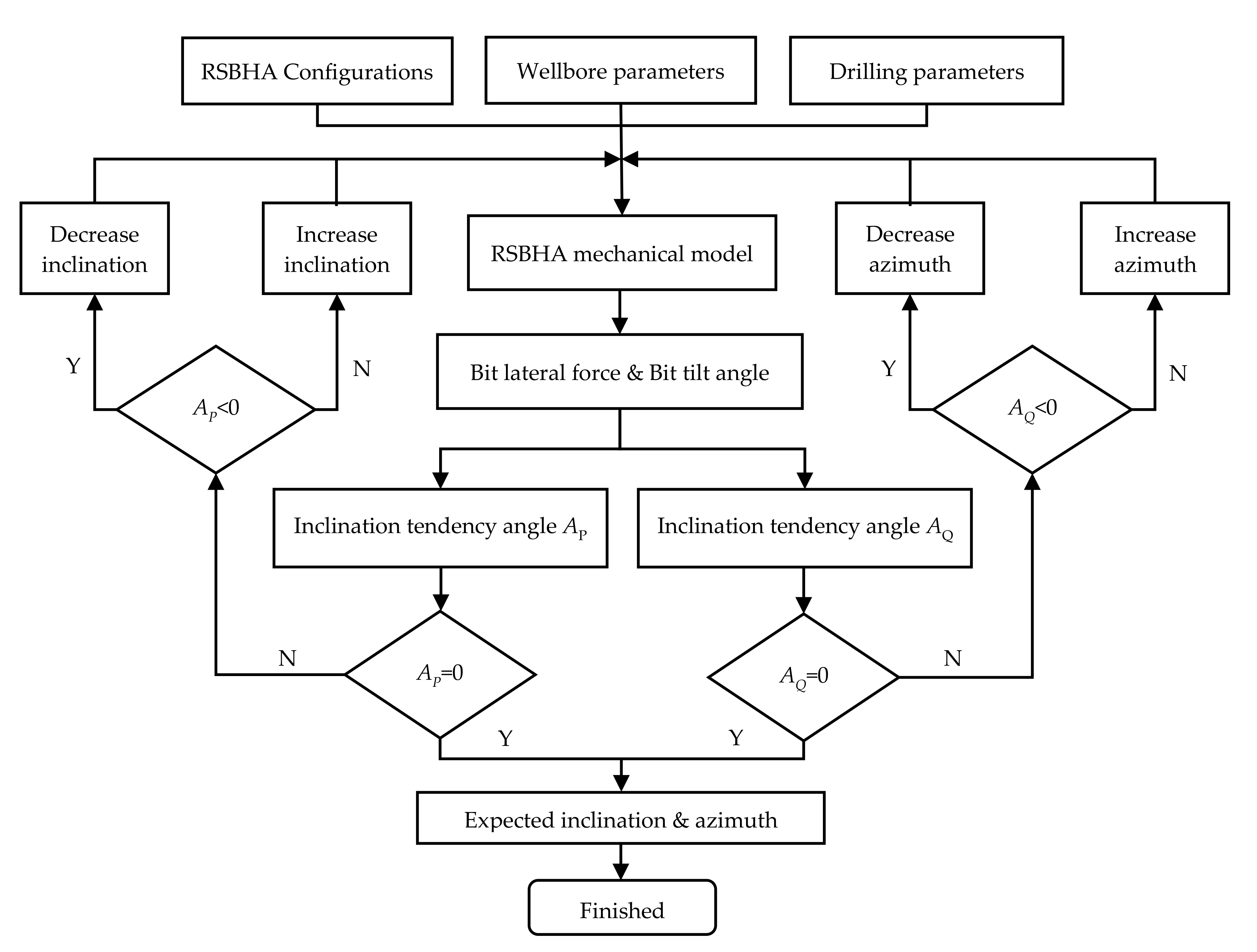
3. Modified BUR Prediction Method
3.1. Principle of the ETM and Its Modifications
3.2. Solution Procedure for the ETM
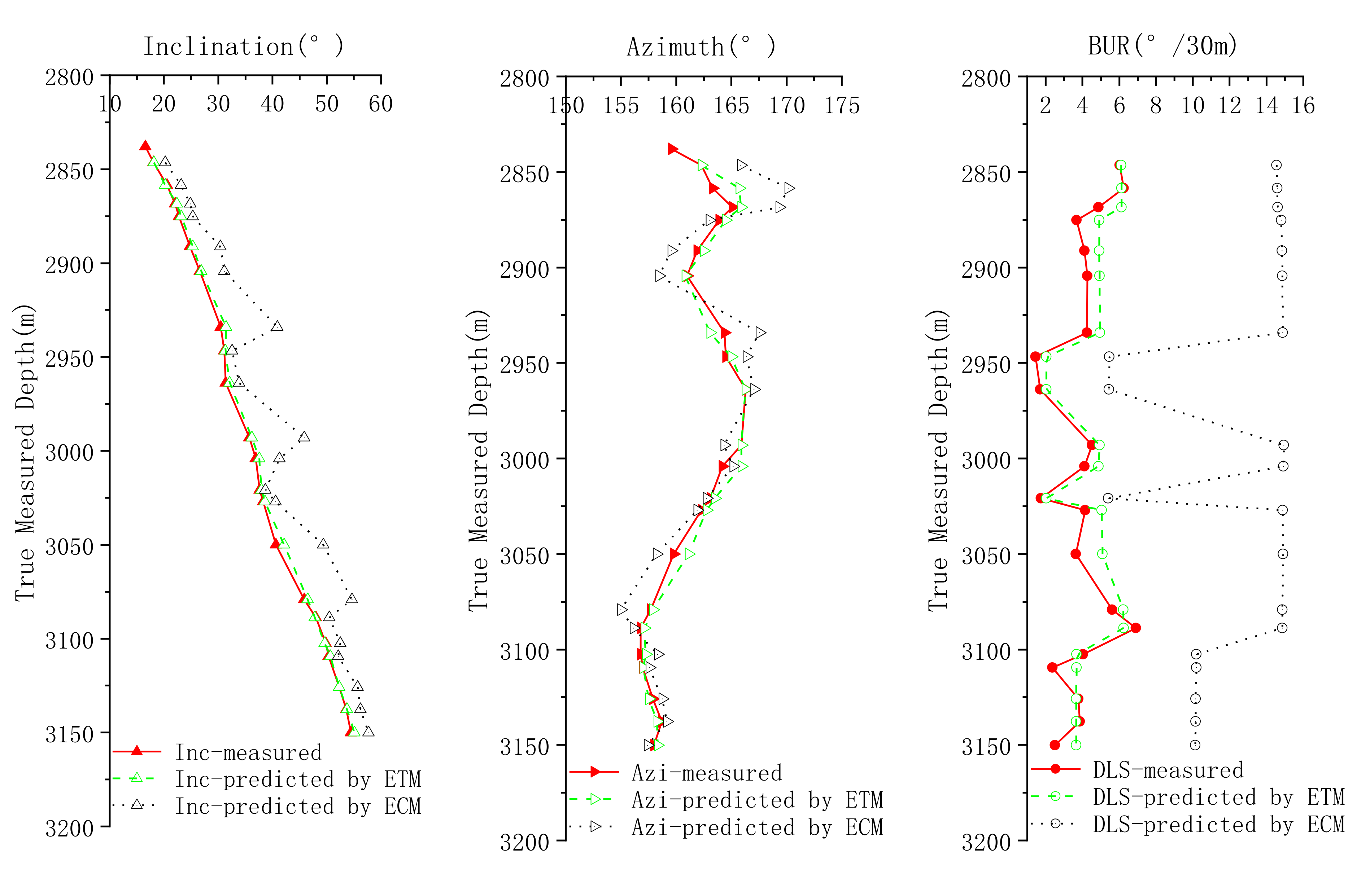
4. Case Calculation and Analysis
5. Conclusions
- (1)
- When establishing the RSBHA mechanical model by using the beam column method, the steering rib should be considered as an eccentric stabilizer.
- (2)
- For the beam column between two stabilizers, it should be rearranged into three beam columns, and the two steps of the flexible sub should be considered as virtual supports.
- (3)
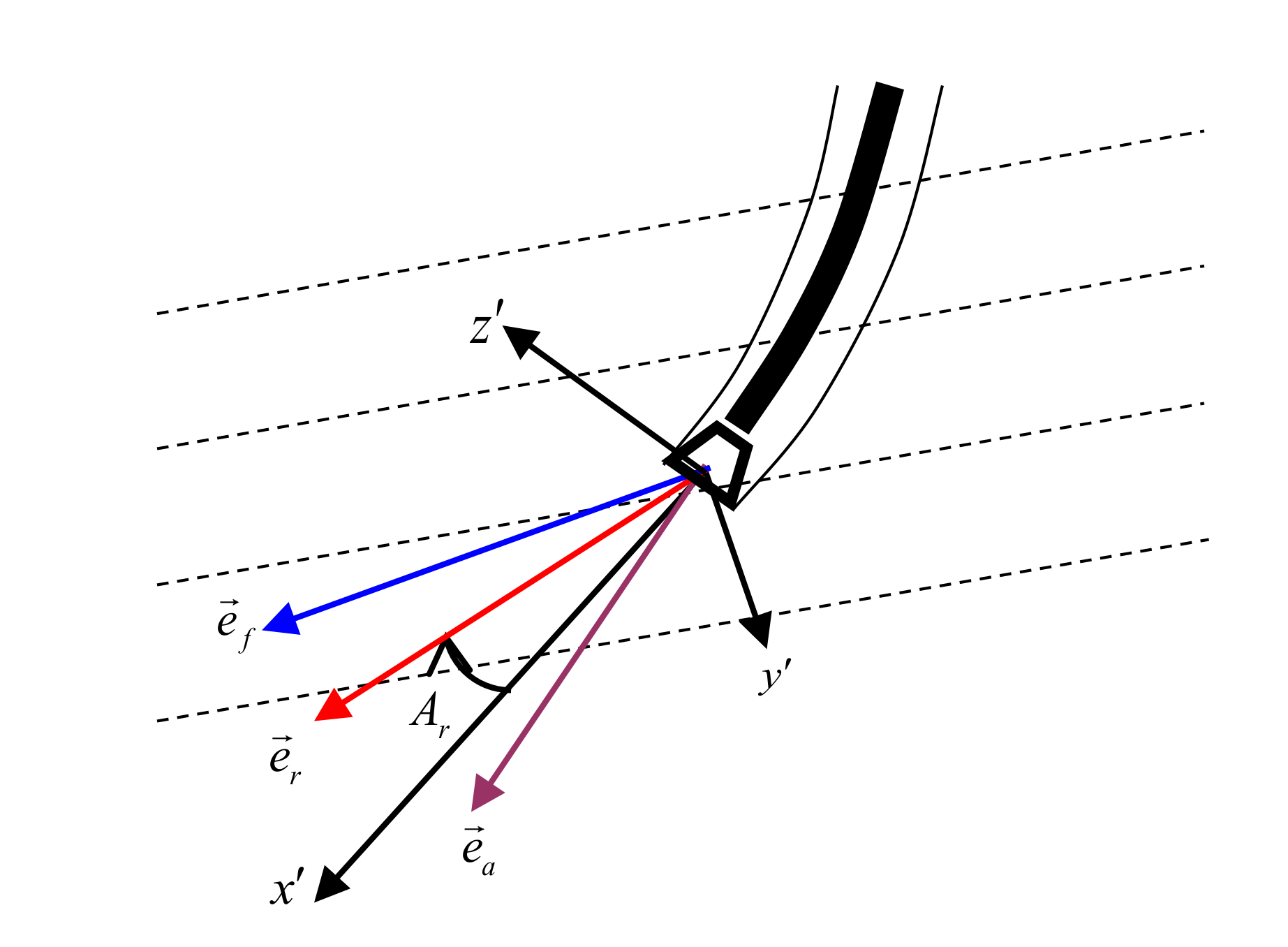
- Under 3D conditions, the total drilling tendency angle should be denoted by inclination tendency angle and azimuth tendency angle to enhance the solution efficiency.
- (4)
- The ETM to predict the BUR can enhance the wellpath prediction accuracy than those of traditional methods. Its average forecast error of BUR is less than 1°/30 m.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| RSS | rotary steerable system |
| BUR | build-up rate |
| BHA | bottom-hole assembly |
| RSBHA | rotary steerable bottom-hole assembly |
| TPCM | three-point circular method |
| ECM | equilibrium curvature method |
| ETM | equilibrium tendency method |
| TMD | true measured depth of a survey station |
References
- Kenupp, R.; Lourenço, A.; Soltvedt, S.; Thomson, I.; Simoes, G.; Morosov, D.; Andrade, R. The Longest Horizontal Section ever Drilled in an Extended-Reach Well in Brazil. In Proceedings of the Offshore Technology Conference Brazil, Rio de Janeiro, Brazil, 24–26 October 2017. [Google Scholar]
- Al Dabyah, A.A.; Zubairi, B.A.; Al Umairin, I.S.; Chima, J.I.; Kunhiveetil, D.; Otaif, H.W. Proper planning supported by latest technology leads to drilling the longest 8.5 in section in an extended-reach well: Case study. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dubai, UAE, 26–28 September 2016. [Google Scholar]
- Jerez, H.; Tilley, J. Advancements in powered rotary steerable technologies result in record-breaking runs. In Proceedings of the SPE Latin American and Caribbean Petroleum Engineering Conference, Maracaibo, Venezuela, 21–23 May 2014. [Google Scholar]
- Warren, T. Steerable motors hold their own against rotary steerable systems. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 24–27 September 2006. [Google Scholar]
- Moody, M.; Boonen, P. Borehole quality analysis comparing rotary steerable tools to conventional directional drilling assemblies. In Proceedings of the AADE 2005 National Technical Conference and Exhibition, Houston, TX, USA, 5–7 April 2005. [Google Scholar]
- Zhang, Y.; Samuel, R. Analytical model to estimate the directional tendency of point and push-the-bit BHAs. In Proceedings of the SPE Annual Technical Conference and Exhibition, Houston, TX, USA, 28–30 September 2015. [Google Scholar]
- Al Dabyah, A.; Biscaro, E.; Mayer, H. New generation of rotary steerable system enables higher BUR and performance. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dubai, UAE, 26–28 September 2016. [Google Scholar]
- Johnstone, J.A.; Allan, D. Realizing true value from rotary steerable drilling systems. In Proceedings of the 1999 Offshore Europe Conference, Aberdeen, UK, 7–9 September 1999. [Google Scholar]
- Karisson, H.; Brassfield, T. Performance drilling optimization. In Proceedings of the SPE/IADC Drilling Conference, New Orleans, LA, USA, 5–8 March 1985. [Google Scholar]
- Karisson, H.; Cobbley, R.; Jaques, G.E. New developments in short, medium, and long-radius lateral drilling. In Proceedings of the SPE/IADC Drilling Conference, New Orleans, LA, USA, 28 February–3 March 1989. [Google Scholar]
- Liu, X.S.; He, S.S.; Zou, Y. Study on the geometric build angle rate of steerable motor. Acta Pet. Sin. 2004, 25, 83–87. [Google Scholar]
- Sugiura, J. Optimal BHA design for steerability and stability with configurable rotary-steerable system. In Proceedings of the SPE Asia Pacific Oil & Gas Conference and Exhibition, Perth, Australia, 20–22 October 2008. [Google Scholar]
- Stroud, D.; Peach, S.; Johnston, I. Optimization of rotary steerable system bottom hole assemblies minimizes wellbore tortuosity and increases directional drilling efficiency. In Proceedings of the SPE Annual Technical Conference and Exhibition, Houston, TX, USA, 26–29 September 2004. [Google Scholar]
- Birades, M.; Fenoul, R. A Microcomputer program for prediction of bottom hole assembly trajectory. SPE Drill. Eng. 1988, 3, 167–172. [Google Scholar] [CrossRef]
- Su, Y.N. A method of limiting curvature and its application. Acta Pet. Sin. 1997, 18, 110–114. [Google Scholar]
- Shi, Y.C.; Guan, Z.C.; Zhao, H.S.; Huang, G.L. A new method for build-up rate prediction of bottom-hole assembly in well drilling. J. China. Univ. Pet. Nat. Sci. Ed. 2017, 1, 85–89. [Google Scholar]
- Panayirci, H.M.; Brands, S.; Houette, O. Selection of optimum bottom hole assembly configuration using steering prediction modeling. J. Nat. Gas Sci. Eng. 2015, 27, 757–762. [Google Scholar] [CrossRef]
- Wang, H.; Guan, Z.C.; Shi, Y.C.; Liu, Y.W.; Liang, D.Y. Drilling trajectory prediction model for push-the-bit rotary steerable bottom hole assembly. Int. J. Eng. 2017, 11, 1800–1806. [Google Scholar]
- Wang, H.; Guan, Z.C.; Shi, Y.C.; Liang, D.Y. Study on build-up rate of push-the-bit rotary steerable bottom hole assembly. J. Appl. Sci. Eng. 2017, 3, 401–408. [Google Scholar]
- Shi, Y.C.; Teng, Z.X.; Bai, J.; Guan, Z.C.; Liu, Q.C.; Wang, H.; Fan, Z.B. Improved mechanical model of the static push-the-bit rotary steerable bottom-hole assembly. J. China. Univ. Pet. Nat. Sci. Ed. 2018, 5, 75–80. [Google Scholar]
- Li, Z.F.; Zhao, J.H.; Li, J.Y. Mathematical models for 3D analysis of rotary steering bottom hole assembly with small deflection. Acta Pet. Sin. 2004, 25, 84–88. [Google Scholar]
- Hong, D.F.; Tang, X.P.; Su, Y.N.; Sheng, L.M.; Dou, X.R. Generalized beam-column method for non-continuous rotary steering drilling of bottom-hole assembly. Acta Pet. Sin. 2014, 35, 543–550. [Google Scholar]
- Tang, X.P.; Su, Y.N.; Ge, Y.H.; Sheng, L.M.; Li, T.J. BHA mechanical analysis for rotary steering drilling system. Mech. Eng. 2013, 1, 55–59. [Google Scholar]
- Bai, J.Z.; Su, Y.N. Deviation Control in Direction Drilling; China Petroleum Industry Press: Beijing, China, 1990. [Google Scholar]
- Ajibose, O.K.; Wiercigroch, M.; Akisanya, A.R. Experimental studies of the resultant contact forces in drill bit-rock interaction. Int. J. Mech. Sci. 2015, 91, 3–11. [Google Scholar]
- Tang, X.P. Non-uniform stiffness beam-column theory and its application. Mech. Eng. 2011, 5, 12–15. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| /mm | 190.0 | /mm | 55.0 | /m | 0.6 | /mm | 215.9 |
| /mm | 190.0 | /mm | 55.0 | /m | 2.4 | /mm | 213.0 |
| /mm | 178.0 | /mm | 57.2 | /m | 0.7 | /mm | 213.0 |
| /mm | 127.0 | /mm | 57.2 | /m | 1.2 | 0.035 | |
| /mm | 178.0 | /mm | 57.2 | /m | 4.5 | ||
| /mm | 178.0 | /mm | 57.2 | /m | 15.0 |
| TMD (m) | dL (m) | Measured Values | Wellpath Control Instructions | Predicted Values by ETM | Predicted Values by ECM | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| INC (°) | AZI (°) | BUR (°/30 m) | INC (°) | AZI (°) | BUR (°/30 m) | INC (°) | AZI (°) | BUR (°/30 m) | |||
| 2838.04 | / | 16.61 | 159.59 | / | 60 kN, 100%, 30° | / | / | / | / | / | / |
| 2846.51 | 8.47 | 18.11 | 162.29 | 6.03 | 18.14 | 162.29 | 6.11 | 20.21 | 165.84 | 14.55 | |
| 2858.42 | 11.91 | 20.57 | 163.29 | 6.25 | 20.26 | 165.72 | 6.12 | 23.20 | 170.14 | 14.59 | |
| 2868.44 | 10.02 | 22.06 | 165.09 | 4.87 | 22.39 | 165.88 | 6.13 | 24.86 | 169.32 | 14.61 | |
| 2875.27 | 6.83 | 22.76 | 163.89 | 3.67 | 80 kN, 100%, 345° | 23.15 | 164.46 | 4.91 | 25.33 | 163.01 | 14.81 |
| 2891.21 | 15.94 | 24.79 | 161.89 | 4.11 | 25.31 | 162.49 | 4.92 | 30.41 | 159.54 | 14.85 | |
| 2904.45 | 13.24 | 26.63 | 160.99 | 4.26 | 26.91 | 160.82 | 4.93 | 31.14 | 158.44 | 14.86 | |
| 2934.09 | 29.64 | 30.5 | 164.39 | 4.25 | 80 kN, 100%, 15° | 31.42 | 163.08 | 4.96 | 40.89 | 167.53 | 14.89 |
| 2946.77 | 12.68 | 31.11 | 164.49 | 1.45 | 80 kN, 33%, 30° | 31.30 | 165.00 | 2.04 | 32.57 | 166.35 | 5.45 |
| 2963.79 | 17.02 | 31.38 | 166.29 | 1.71 | 32.12 | 166.26 | 2.04 | 33.88 | 167.04 | 5.44 | |
| 2992.96 | 29.17 | 35.77 | 165.89 | 4.52 | 80 kN, 100%, 355° | 36.18 | 165.92 | 4.94 | 45.85 | 164.35 | 14.94 |
| 3004.08 | 11.12 | 36.91 | 164.19 | 4.10 | 37.58 | 165.92 | 4.88 | 41.28 | 165.15 | 14.93 | |
| 3020.87 | 16.79 | 37.62 | 163.09 | 1.74 | 80 kN, 33%, 330° | 37.96 | 163.49 | 2.03 | 38.71 | 162.74 | 5.41 |
| 3027.07 | 6.20 | 38.32 | 162.29 | 4.14 | 80 kN, 100%, 345° | 38.64 | 162.76 | 5.04 | 40.60 | 161.89 | 14.89 |
| 3050.04 | 22.97 | 40.61 | 159.79 | 3.64 | 42.14 | 161.11 | 5.08 | 49.38 | 158.22 | 14.90 | |
| 3079.22 | 29.18 | 45.88 | 157.69 | 5.62 | 60 kN, 100%, 345° | 46.53 | 157.90 | 6.23 | 54.63 | 154.99 | 14.87 |
| 3088.83 | 9.61 | 47.99 | 156.79 | 6.90 | 47.83 | 157.10 | 6.24 | 50.50 | 156.13 | 14.86 | |
| 3102.53 | 13.70 | 49.83 | 156.79 | 4.03 | 80 kN, 66%, 15° | 49.63 | 157.25 | 3.67 | 52.50 | 158.31 | 10.20 |
| 3109.50 | 6.97 | 50.36 | 156.99 | 2.37 | 50.66 | 157.02 | 3.67 | 52.12 | 157.56 | 10.20 | |
| 3125.79 | 16.29 | 52.29 | 157.89 | 3.78 | 52.31 | 157.52 | 3.66 | 55.70 | 158.73 | 10.16 | |
| 3137.74 | 11.95 | 53.61 | 158.69 | 3.85 | 53.72 | 158.27 | 3.66 | 56.20 | 159.15 | 10.15 | |
| 3150.22 | 12.48 | 54.49 | 157.99 | 2.50 | 80 kN, 66%, 345° | 55.10 | 158.30 | 3.66 | 57.69 | 157.40 | 10.14 |
| Average absolute error/ Maximum absolute error | 0.43/1.53 | 0.59/2.43 | 0.67/1.44 | 4.10/10.39 | 1.82/6.85 | 8.38/11.26 | |||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Teng, Z.; Guan, Z.; Bai, J.; Lv, W.; Liao, H.; Xu, Y.; Liu, Y. A Powerful Build-Up Rate (BUR) Prediction Method for the Static Push-the-Bit Rotary Steerable System (RSS). Energies 2020, 13, 4847. https://doi.org/10.3390/en13184847
Shi Y, Teng Z, Guan Z, Bai J, Lv W, Liao H, Xu Y, Liu Y. A Powerful Build-Up Rate (BUR) Prediction Method for the Static Push-the-Bit Rotary Steerable System (RSS). Energies. 2020; 13(18):4847. https://doi.org/10.3390/en13184847
Chicago/Turabian StyleShi, Yucai, Zhixiang Teng, Zhichuan Guan, Jing Bai, Wei Lv, Hualin Liao, Yuqiang Xu, and Yongwang Liu. 2020. "A Powerful Build-Up Rate (BUR) Prediction Method for the Static Push-the-Bit Rotary Steerable System (RSS)" Energies 13, no. 18: 4847. https://doi.org/10.3390/en13184847
APA StyleShi, Y., Teng, Z., Guan, Z., Bai, J., Lv, W., Liao, H., Xu, Y., & Liu, Y. (2020). A Powerful Build-Up Rate (BUR) Prediction Method for the Static Push-the-Bit Rotary Steerable System (RSS). Energies, 13(18), 4847. https://doi.org/10.3390/en13184847