1. Introduction
The increasing demand for fossil fuels in different fields since the Industrial Revolution has led to increasing global CO
2 emission and worsening global warming. Among all CO
2 emission, the emission of means of transportation is only second to the industry. Now, the passenger vehicles all develop toward alternative energy, whereas the medium and heavy vehicles for goods transportation are still using gasoline or diesel engines as the main power source. With global warming and increasing stringent laws and regulations, they will definitely develop toward the same clean energy as the passenger vehicles. According to Navigant Research, the market survey company, hydraulic hybrid vehicles seldom known and underestimated in significance will gain a position in the heavy-duty truck market, and even can be expected to apply to the next generation of vehicles. Therefore, hydraulic electric hybrid vehicles (HEHV) will be the first choice for medium vehicles, heavy vehicles, and common carriers. With the DSHplus software simulation, Sokar [
1] compared the fuel economy of the hydraulic transmission vehicles and hydraulic hybrid vehicles in urban and highway driving cycles. Chen [
2] compared the energy consumption of different hydraulic hybrid configurations, and it showed the HEHV could have better energy efficiency over the pure EV system. The energy optimization can be divided to hardware optimization and control strategy optimization. As for hardware optimization, Ramakrishnan et al. [
3] proposed the study on influence of system parameters in hydraulic system on the overall system power and established the series hydraulic hybrid power vehicle with LMS AMESim software. Change of size of accumulator and hydraulic motor/pump and internal pressure greatly improves the output power of the whole system, which also reduces the fuel consumption and pollution of the hydraulic hybrid vehicles. The energy control strategy can be divided into two categories [
4]: (1) rule-based strategy and (2) optimization-based strategy. For optimization strategy, Lu et al. [
5] introduced the weighted-sum method and no-preference method to solve the multi-objective optimization problem of plug-in electric vehicles, and it was validated with ADVISOR software. Zeng et al. [
6] proposed a different strategy, Equivalent Consumption Minimum Strategy (ECMS), to solve the optimization problem of PHEV, and the Simplified-ECMS strategy could effectively shorten the calculation time. Wang et al. [
7] applied the Dynamic Programming for PHEV and received an approximately 20% improvement in fuel economy.
The rule-based control, featuring a smaller amount of calculation, is adopted by many studies, to design the energy management strategy. Yu et al. [
8] developed a simulation model and rule-based control strategy for extended-range electric vehicle (E-REV) and showed that a small engine can be used to reduce the weight of vehicle and batteries of E-REV. Gao et al. [
9] proposed two control strategies, thermostat and power follower. With dynamic programming, it showed that the thermostat control strategy optimized the operation of the internal combustion engine, and the power follower control strategy minimizes the battery-charging and -discharging operations. Konev et al. [
10] developed a control strategy for series hybrid vehicle. The control strategy was to ensure gradual operation of the motor along the steady-state Optimal Operating Points Line (OOP-Line) in the engine speed–torque map, which could improve the efficiency of series hybrid vehicle. Liu et al. [
11] developed a control strategy for a series hybrid vehicle which included two parts, constant
SOC control, and driving-range optimization. Comparing to thermostat control strategy, the constant
SOC control could have a longer driving range. Li et al. [
12] proposed a fuzzy logic energy-management system, using the battery working state, which ensured that the engine would operate in the vicinity of its maximum fuel-efficiency region. The rule-based design is fast and easy and can be readily applied to real vehicle-control strategy. However, the rule-based control strategy is simple, so it cannot provide optimal power management to HEV in real time. Therefore, an optimization algorithm is required for rule-based control to improve the energy efficiency. Ho and Klong [
13] introduced an optimization algorithm for series plug-in hybrid electric vehicles by utilizing the genetic algorithm (GA), which could determine the optimal driving patterns offline. Xu et al. [
14] developed a fuzzy control strategy for parallel hybrid electric vehicle. The control strategy was adjusted with GA. It was verified that GA could effectively improve the efficiency of the engine and fuel consumption. Kaur et al. [
15] proposed a control strategy to control the speed of a hybrid electric vehicle. The controller, which was using GA, could improve fuel economy and reduce pollution. Hu and Zhao [
16] applied an adaptive based hybrid genetic algorithm to optimize the energy efficiency of parallel hybrid electric vehicles and presented the effectiveness of the hybrid genetic algorithm.
Therefore, global optimization, together with rule-based control method, are selected in this paper for medium and heavy vehicles in fixed driving route, to adjust the rule-based control strategy and improve the electricity economic performance of vehicles. The optimization approach selected in this paper is genetic algorithm (GA). With global optimization ability and probability optimization approach, GA can automatically obtain and instruct the optimized search space and adaptively adjust the search direction without the need of clear rules.
3. Optimization Control Strategy
In this study, genetic algorithm (GA) was applied as the optimization function. The rule-based control was taken as the energy management strategy of HEHV first, and the simulation result was compared with the pure-electric-vehicle model. Then, the selected optimization approach was implemented for global optimization. From those results, together with a rule-based control approach, the optimal electricity economic performance was obtained.
The global optimization calculation was made by genetic algorithm. The objective of GA optimization was to minimize electricity consumption, and the objective function was set to be the reciprocal of the lithium ion battery’s state of charge, SOL Li, as shown in Equation (19). The setting of objective function in GA could correspond to the fitness function, as shown in Equation (20). Parameters of GA set in this study are shown in
Table 1.
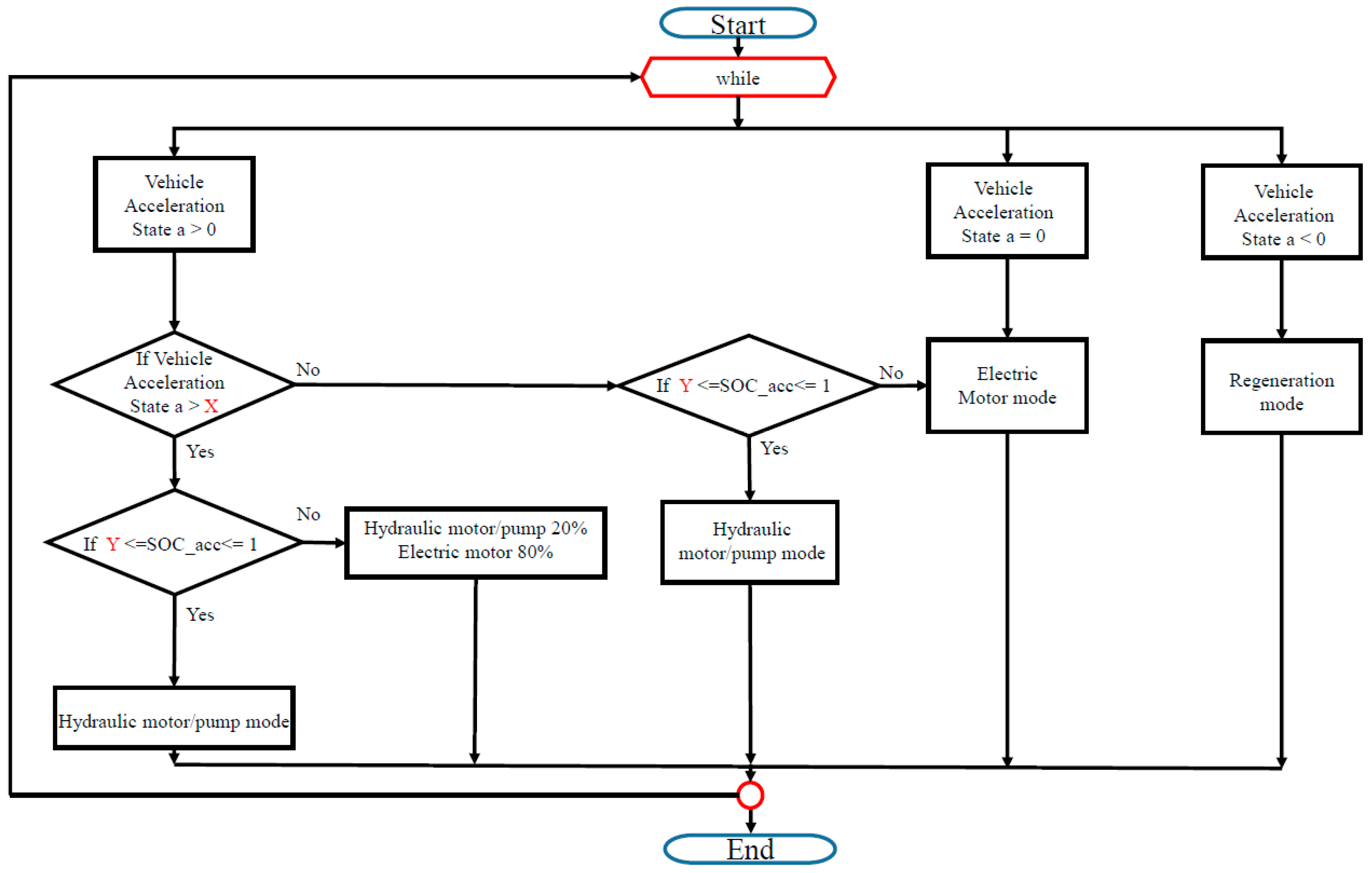
Two design variables (vehicle acceleration and accumulator
SOC) were applied to judge the time to use the hydraulic system in control strategy. The thresholds of vehicle acceleration and accumulator
SOC were set as selected variables
x and
y for optimization, respectively. If the vehicle acceleration was higher than the acceleration threshold and the accumulator
SOC was higher than the accumulator threshold, the hydraulic pump provided the required power for vehicle acceleration. If the vehicle acceleration was lower than the acceleration threshold and the accumulator
SOC was lower than the accumulator threshold, the electric motor provided the required acceleration power. If the vehicle acceleration was higher than the acceleration threshold and the accumulator
SOC was lower than the accumulator threshold, the electric motor provided the major portion of required acceleration power. Some other detailed judgements of applying hydraulic pump and the overall control flow are shown in
Figure 6. To prevent the calculation of variables
x and
y from exceeding the maximum component scope, the setting constraints of the variables are shown in the constraint Equations (21) and (22).
The fitness function was adapted to judge whether the solution of GA was suitable for the overall response of the hydraulic system. Values of acceleration threshold x and accumulator threshold y were recorded each time the GA was simulated. After the algorithm completed the iteration set of simulation, its fitness performance was looked up to ensure the value of fitness function was reasonable. The number of mutations and whether the optimization was convergence were checked during the operation of GA. In this study, the convergence of GA was judged by the difference of fitness values between the final four generations. If each difference was smaller than 1%, the optimization reached the convergence. From the solution of optimal fitness value, the recorded variables x and y were selected as the optimal set threshold. This set of variables could be implemented in rule-based control algorithm for real-time simulation and improve the energy consumption. With the implement of genetic algorithm, the rule-based control algorithm for real-time simulation could achieve the energy performance close to optimization.
The thresholds of vehicle acceleration and accumulator
SOC calculated from the genetic algorithm were 0.9 and 0.1, respectively. The diagram of control strategy was modified, as shown in
Figure 7.
4. Results
The vehicle parameters of the simulated vehicle are presented in
Table 2. The mass of vehicle includes the gross weight, which is 7200 kg, and 20 passengers, which is 1600 kg.
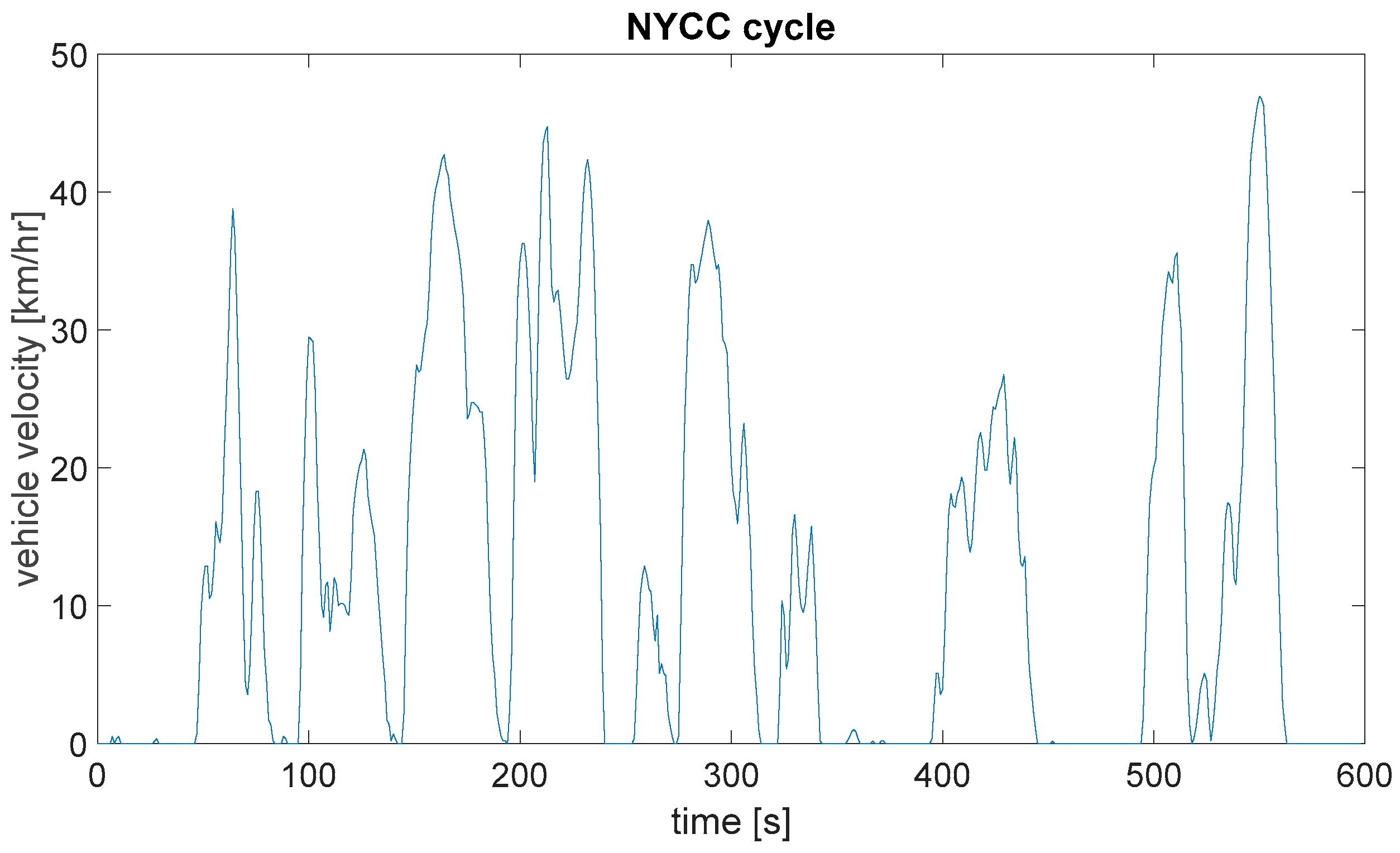
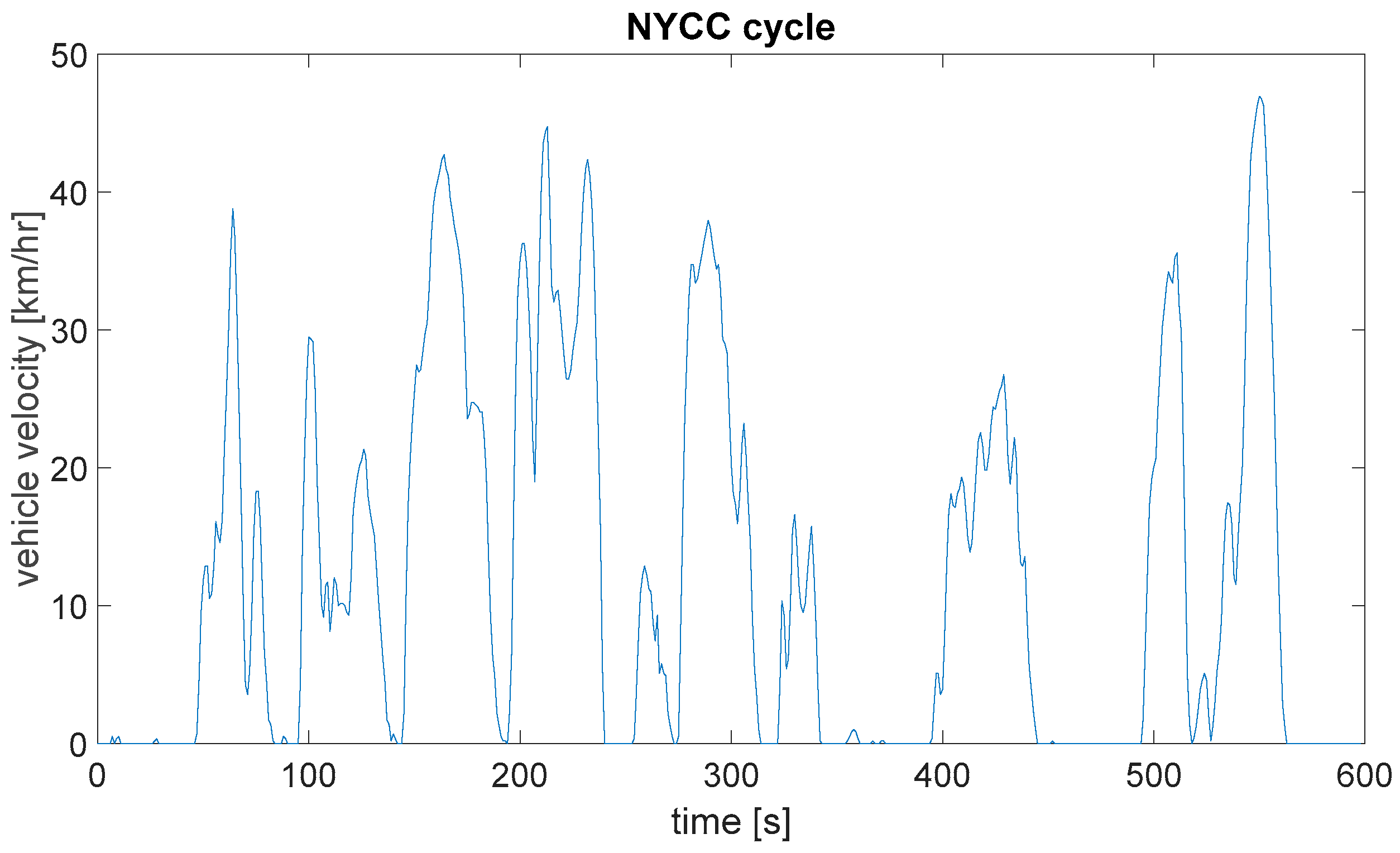
In this section, simulation results of the pure electric vehicle and HEHV are compared, and that of the HEHV with optimized energy management strategy is explored. With the energy consumption of the NYCC driving cycle as the analysis basis, the difference of component performance is discussed. Firstly, the pure electric vehicle was established based on the set subsystem model, and it was taken as the basic model. Then the HEHV model was established based on the hydraulic components (hydraulic motor/pump and accumulator), and the rule-based control strategy was applied for the energy management of the power system. Finally, the rule-based control strategy was improved based on the results from the genetic algorithm, to get the HEHV with optimization energy management strategy.
4.1. EV vs. HEHV (Rule-Based)
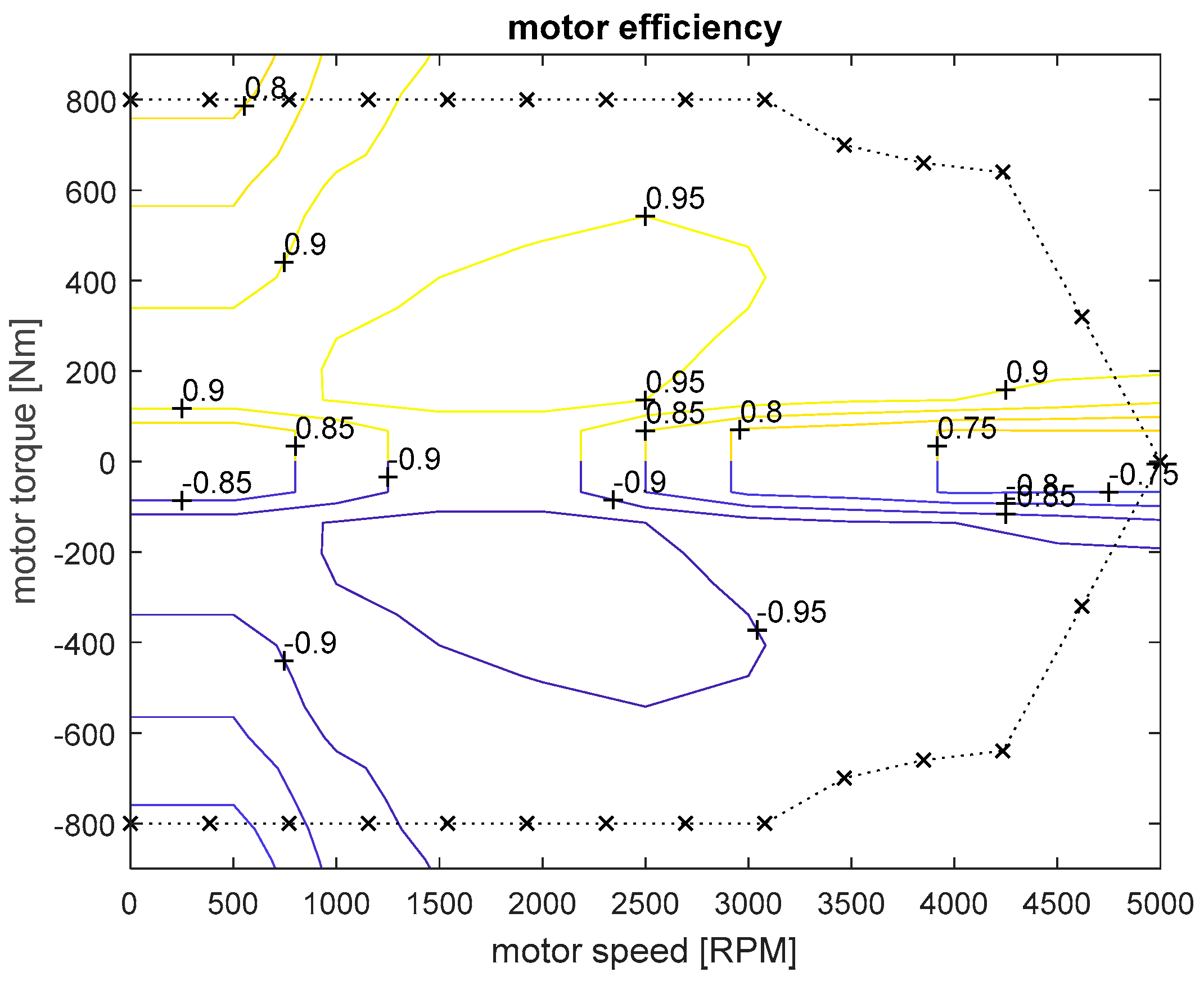
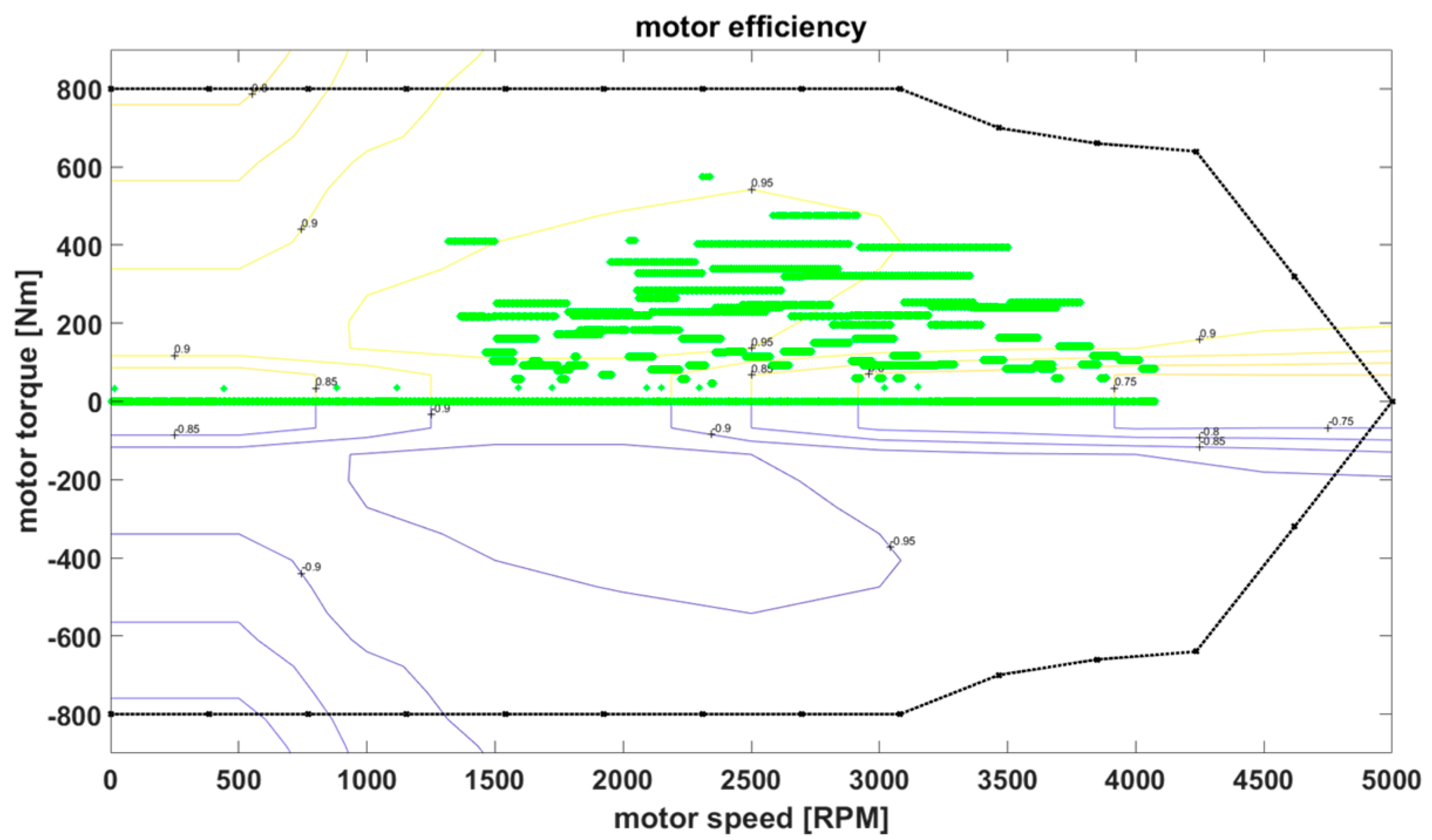
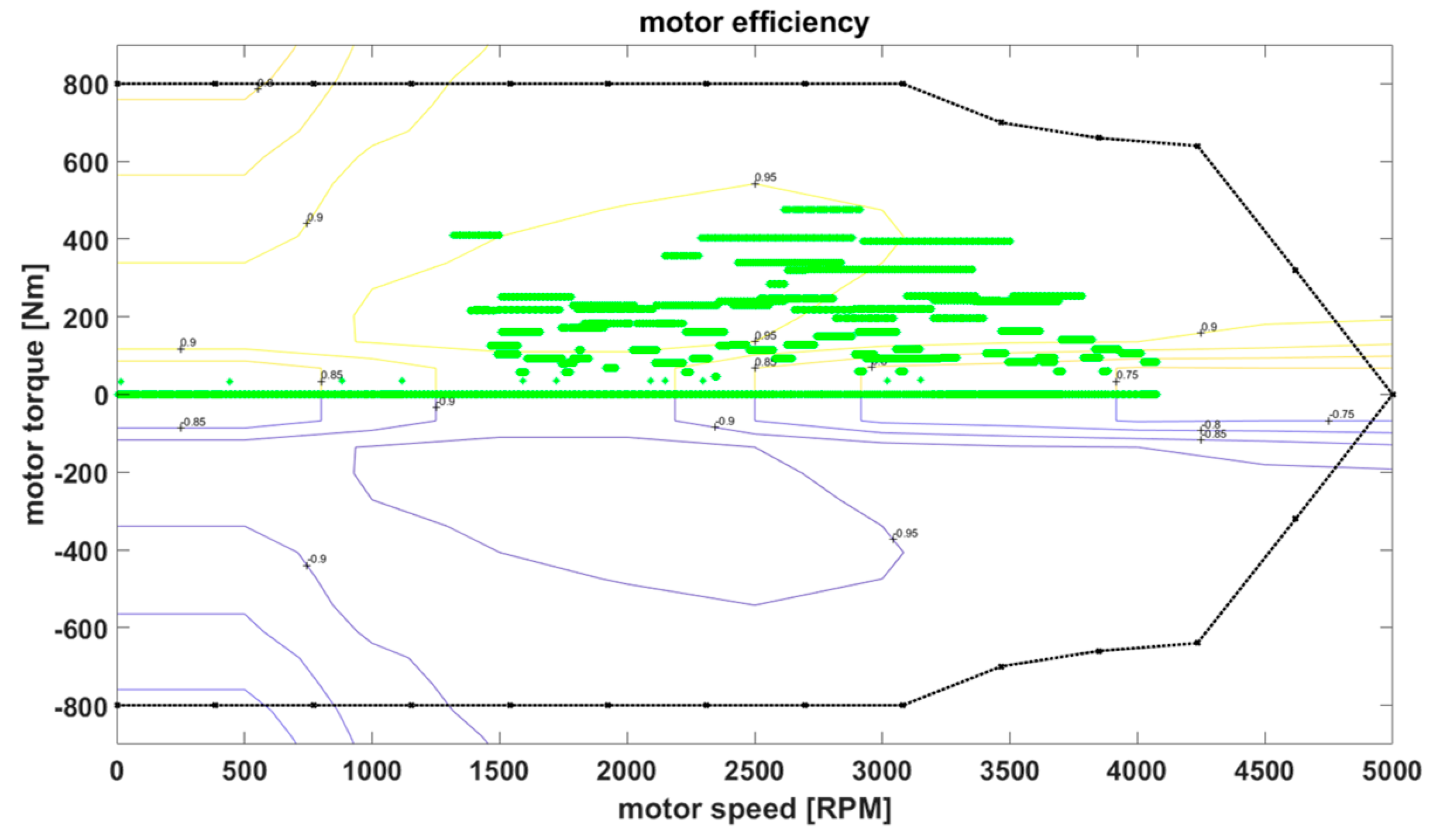
This section compares the difference between the EV and HEHV and presents the causes of the differences. The operating points of the EV electric motor are presented in
Figure 8, and those of HEHV electric motor are show in
Figure 9. It is obvious that the HEHV electric motor does not work at heavy load and low speed, so it was replaced with a hydraulic motor/pump. Therefore, the operating efficiency points concentrate on the high-efficiency region, and the HEHV features better electricity economic performance than the pure electric vehicle.
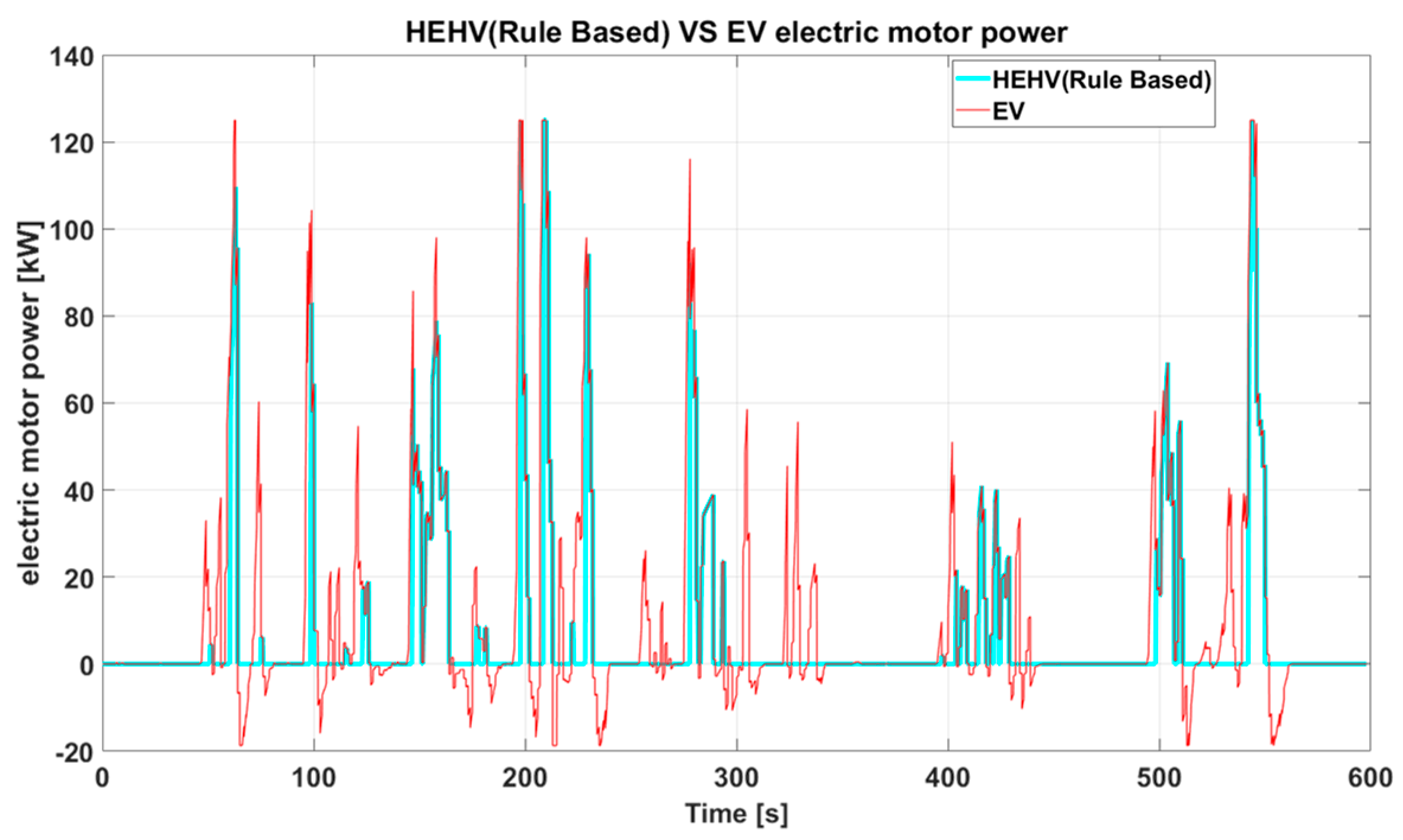
In order to better understand the reason that the HEHV has a better economic performance than the pure electric vehicle, the power of electric motors is compared. As shown in
Figure 10, the power of HEHV electric motor is smaller than that of pure electric vehicle.
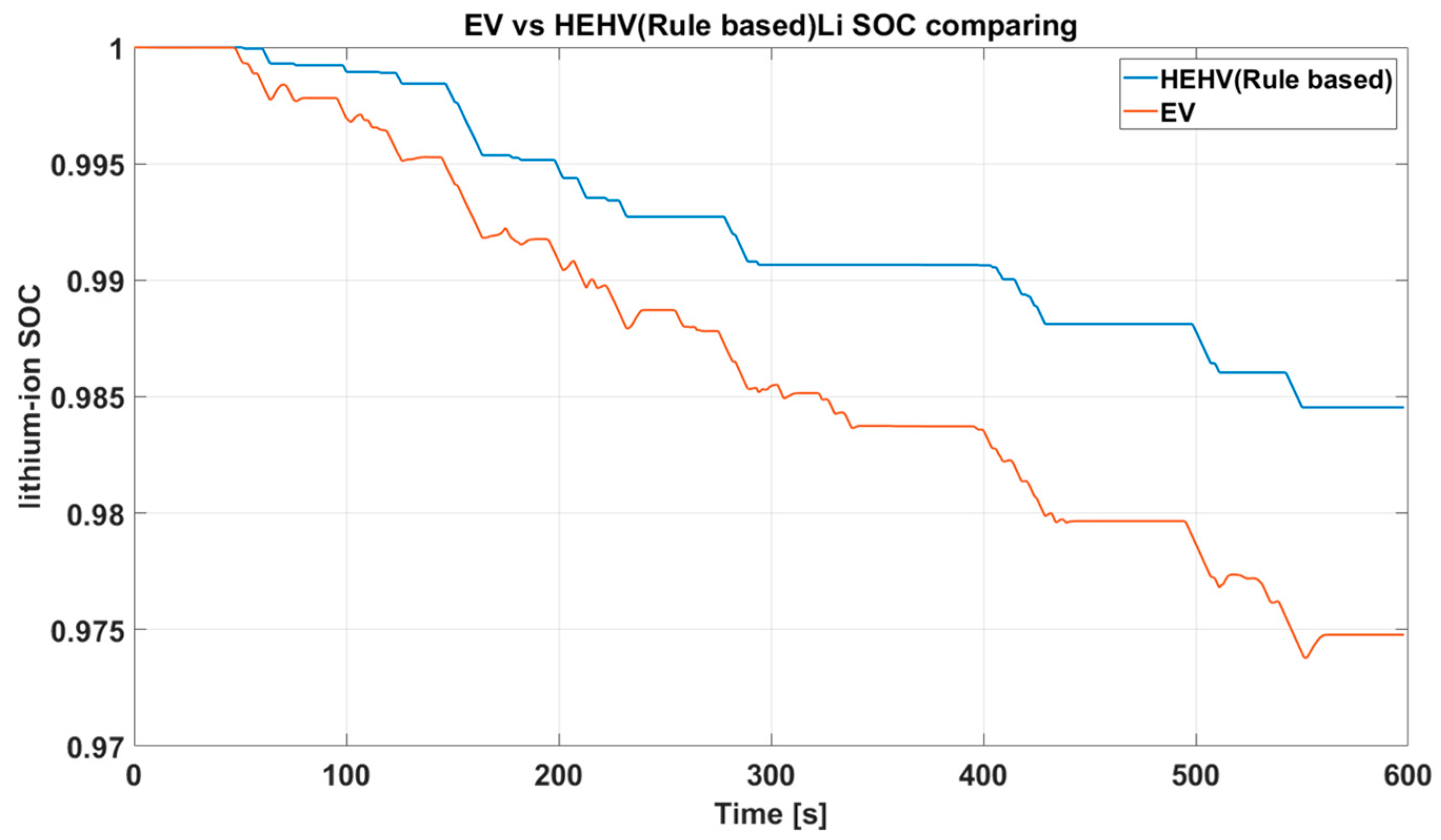
Figure 11 shows the comparison of battery
SOC, where the electricity economic performance of HEHV is greatly improved.
Table 3 shows the electricity economic performance of the EV and HEHV (rule-based). Since a hydraulic motor functions as the drive at the HEHV’s low speed, the use of an electric motor in the low-efficiency zone is reduced, and the electricity is optimized. The electricity economy of the HEHV has 36.5% improvement over that of EV.
4.2. HEHV (Rule-Based) vs. HEHV (GA)
This research had taken the genetic algorithm (GA), together with rule-based control, to perform global optimization, and it got the optimal electricity economic performance. In this section, the HEHV with original rule-based control is compared with the HEHV with modified rule-based control based on the genetic algorithm optimization. The distribution of operating points of the HEHV (rule-based) and HEHV (GA) electric motors is presented in
Figure 12 and
Figure 13, respectively. The distribution suggests that the operating points of the electric motor after being modified for optimization concentrate more on the high-efficiency region.
To understand the motor-use state, the power is compared in this paper, as shown in
Figure 14. The usage rate of the electric motor after optimization is less than the original rule-based control strategy, so that better electricity economic performance is reached.
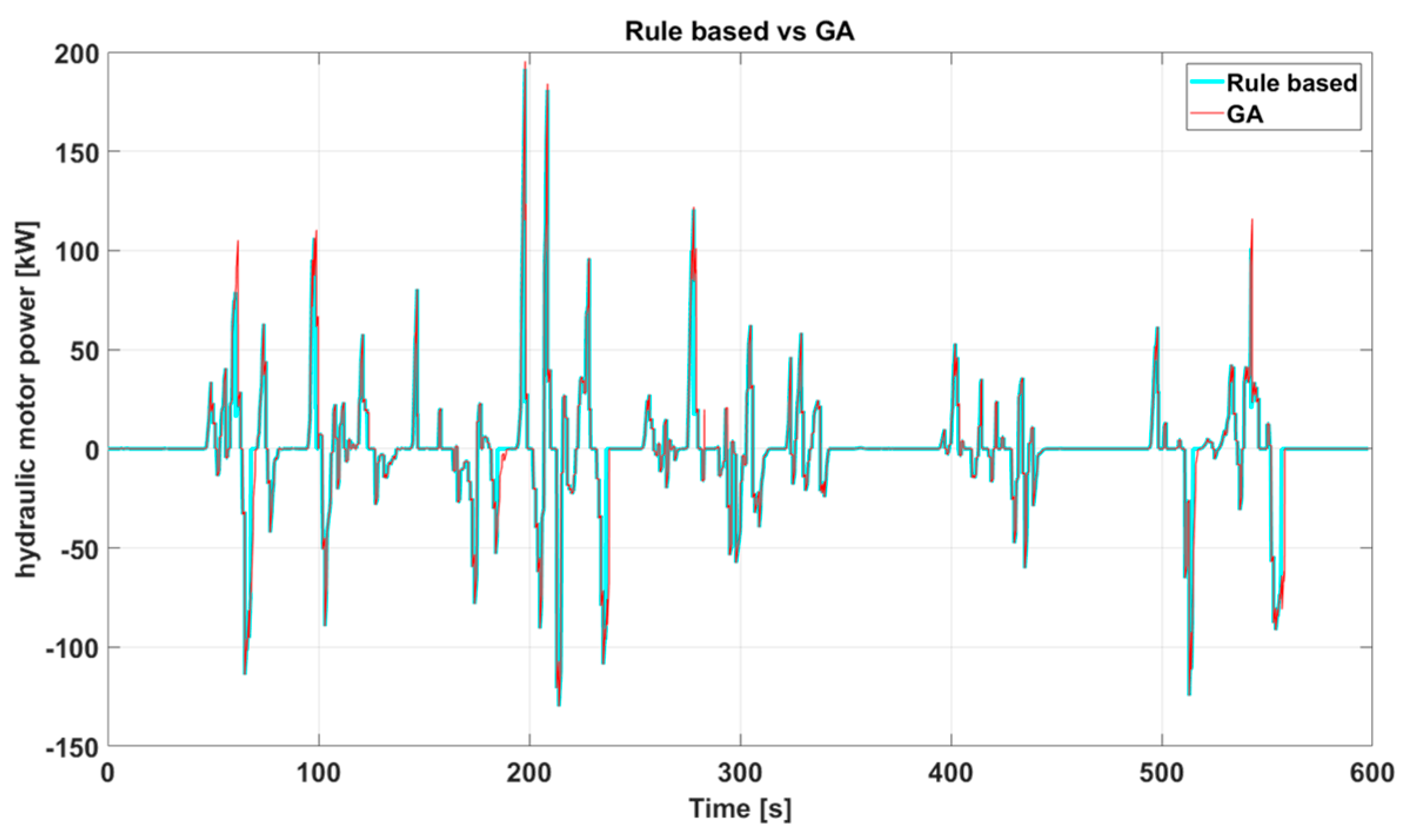
The reason why the electric-motor-usage rate after optimization is less can be explained with the help of a comparison of hydraulic motor power, as shown in
Figure 15. It is found that the HEHV after optimization uses more hydraulic energy than the original control strategy.
As suggested by the comparison of operating-point distribution of hydraulic motor/pump of two control strategies (
Figure 16) and state of accumulator use (
Figure 17), there are more operating points for the hydraulic motor/pump after optimization than for the original strategy, and they tend to be in the high-efficiency zone. The accumulator is applied more completely due to the wider range of applications for the hydraulic motor/pump.
The analysis above indicates that the electricity economic performance of the HEHV after optimization is more improved.
Figure 18 shows the battery
SOC comparison of the EV and HEHV (Rule based) and HEHV (GA). It is clear that the HEHV after optimization is more improved than the HEHV with original strategy.
The electricity economic performance of the HEHV (rule-based) and HEHV (GA) is drawn in
Table 4.
Table 5 shows the percentage improvement of electricity in this study. The HEHV with original rule-based control shows 36.5% improvement over the EV, and the HEHV with modified rule-based control has 43.7% improvement.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}