Optimization of Energy Management Strategy for the EPS with Hybrid Power Supply Based on PSO Algorithm


Abstract
:
1. Introduction
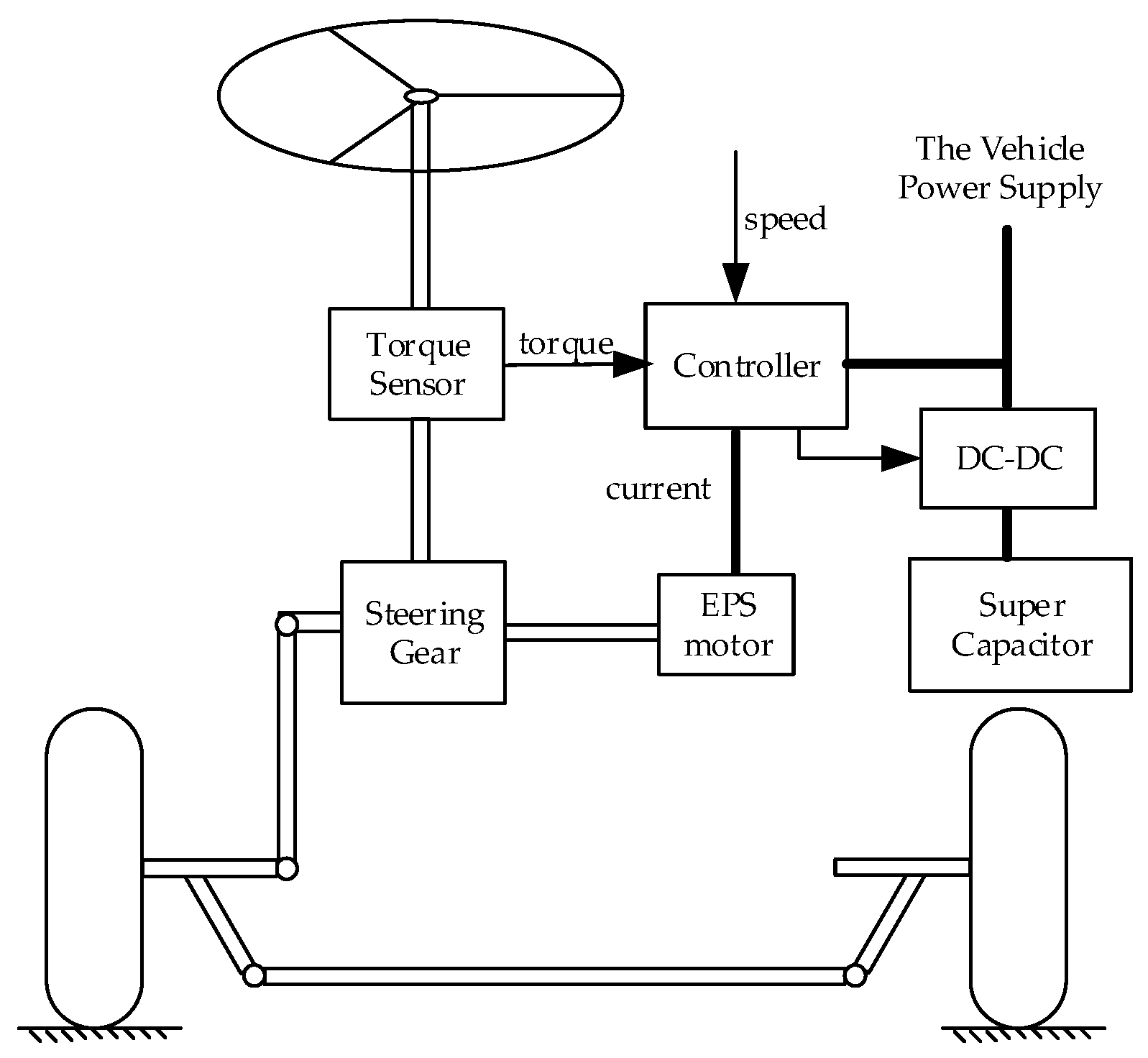
2. The Structure and Principle of HP-EPS
3. The Mathematical Model of HP-EPS
4. The Energy Management Strategy of HP-EPS
5. Optimization of Parameters in the Rule-Based Energy Management Strategy
5.1. Optimization Model of Energy Management Strategy
5.2. Fitness Model
5.3. Process and Results of the Optimization
6. The Verification of Energy Management Strategy
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dannöhl, C.; Müller, S.; Ulbrich, H. H∞-control of a rack-assisted electric power steering system. Veh. Syst. Dyn. 2012, 50, 527–544. [Google Scholar] [CrossRef]
- Shi, G.; Lin, Y.; Zhang, X. Power Steering Technology and Development. Trans. Chin. Soc. Agric. Mach. 2006, 10, 173–176. [Google Scholar]
- Nakayama, T.; Suda, E. The present and future of electric power steering. Int. J. Veh. Des. 1994, 15, 243–254. [Google Scholar]
- Zhao, W.; Luan, Z.; Wang, C. Parametric optimization of novel electric—Hydraulic hybrid steering system based on a shuffled particle swarm optimization algorithm. J. Clean. Prod. 2018, 186, 865–876. [Google Scholar]
- Zhao, W.; Luan, Z.; Wang, C. Parameter optimization design of vehicle E-HHPS system based on an improved MOPSO algorithm. Adv. Eng. Softw. 2018, 123, 51–61. [Google Scholar] [CrossRef]
- Cao, D.; Tang, B.; Jiang, H.; Yin, C.; Zhang, D.; Huang, Y. Study on Low-Speed Steering Resistance Torque of Vehicles Considering Friction between Tire and Pavement. Appl. Sci. 2019, 9, 1015. [Google Scholar] [CrossRef] [Green Version]
- Mustafa, F.; Osama, M.A. Event-Based Protection Scheme for a Multiterminal Hybrid DC Power System. IEEE Trans. Smart Grid 2015, 6, 1658–1669. [Google Scholar]
- Teymourfar, R.; Asaei, B.; Iman-Eini, H. Stationary super-capacitor energy storage system to save regenerative braking energy in a metro line. Energy Convers. Manag. 2012, 56, 206–214. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, Y.; Lin, Z.; Zhao, K.; Ye, J. Energy Management Strategy Optimization of Hybrid Storage System Based on Radau Pseudo-Spectral Method. Automot. Eng. 2019, 41, 625–633. [Google Scholar]
- Trovão, J.P.; Antunes, C.H. A comparative analysis of meta-heuristic methods for power management of a dual energy storage system for electric vehicles. Energy Convers. Manag. 2015, 95, 281–296. [Google Scholar]
- Pan, C.; Chen, L.; Chen, L.; Huang, C.; Xie, M. Research on energy management of dual energy storage system based on the simulation of urban driving schedules. Int. J. Electr. Power Energy Syst. 2013, 44, 37–42. [Google Scholar] [CrossRef]
- Battistelli, L.; Fantauzzi, M.; Iannuzzi, D.; Lauria, D. Energy management of electrified mass transit systems with energy storage devices. In Proceedings of the International Symposium on Power Electronics Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012; pp. 1172–1177. [Google Scholar]
- Zhang, L.; Hu, X.; Wang, Z.; Sun, F.; Deng, J.; Dorrell, D.G. Multi objective optimal sizing of hybrid energy storage system for electric vehicles. IEEE Trans. Veh. Technol. 2017, 67, 1027–1035. [Google Scholar] [CrossRef]
- Song, Z.; Li, J.; Han, X.; Xu, L.; Lu, L.; Ouyang, M.; Hofmann, H. Multi-objective optimization of a semi-active battery/super capacitor energy storage system for electric vehicles. Appl. Energy 2014, 135, 212–224. [Google Scholar] [CrossRef]
- Song, C.; Zhou, F.; Xiao, F. Parameter Matching of On-board Hybrid Energy Storage System Based on Convex Optimization Method. Mech. Eng. 2017, 53, 44–51. [Google Scholar] [CrossRef]
- Zhu, X.; Han, H.; Gao, S.; Shi, Q.; Cui, H.; Zu, G. A multi-stage optimization approach for active distribution network scheduling considering coordinated electrical vehicle charging strategy. IEEE Access 2018, 6, 50117–50130. [Google Scholar] [CrossRef]
- Santucci, A.; Sorniotti, A.; Lekakou, C. Power split strategies for hybrid energy storage systems for vehicular applications. J. Power Sources 2014, 258, 395–407. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Xiao, F.; Chang, C.; Shao, Y.; Song, C. Adaptive model predictive control-based energy management for semi-active hybrid energy storage systems on electric vehicles. Energies 2017, 10, 1063. [Google Scholar] [CrossRef] [Green Version]
- Song, Z.; Hofmann, H.; Li, J.; Han, X.; Ouyang, M. Optimization for a hybrid energy storage system in electric vehicles using dynamic programing approach. Appl. Energy 2015, 139, 151–162. [Google Scholar] [CrossRef]
- Song, C.; Zhou, F.; Xiao, F. Energy management optimization of hybrid energy storage system(HESS)based on dynamic programming. Jilin Univ. (Eng. Technol. Ed.) 2017, 47, 8–14. [Google Scholar]
- Zhang, S.; Xiong, R.; Cao, J. Battery durability and longevity based power management for plug-in hybrid electric vehicle with hybrid energy storage system. Appl. Energy 2016, 179, 316–328. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhao, K.; Liu, Z. Energy management strategy research on a hybrid power system by hardware-in-loop experiments. Appl. Energy 2013, 112, 1311–1317. [Google Scholar] [CrossRef]
- Hou, Y.; Hu, Y.; Hu, D.; Li, C. Synthesis of Muti-Axle Steering System of Heavy Duty Vehicle Based on Probability of Steering Angle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2000. [Google Scholar] [CrossRef]
- Yang, H. Estimation of supercapacitor charge capacity bounds considering charge redistribution. Ieee Trans. Power Electron. 2017, 33, 6980–6993. [Google Scholar] [CrossRef] [PubMed]
- Bonyadi, M.R.; Michalewicz, Z. Particle Swarm Optimization for Single Objective Continuous Space Problems: A Review. Evol. Comput. 2017, 25, 1–54. [Google Scholar] [CrossRef] [PubMed]
- Ning, C. Study on Control Strategy of Electric Power Steering System of Large-Size Electric Bus. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2012. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Required Currentof EPS | SOC of SC | Current Distribution ofthe VPS and the SC |
|---|---|---|
| Apparatus | Application | Type | Manufacturer |
|---|---|---|---|
| MSW DTI sensor universal measurement steering wheel | Universal measurement steering wheel for measurement of the steering torque, steering angle, and steering speed; for vehicle driving dynamics tests like ISO 4138, steady-state circular course drive Angle resolution: 0.5° Torque resolution: 0.1 N·m | 5612A | KISTLER |
| Correvit S-Motion DTI Non-contact optical sensor | High-precision, slip-free measurement of:
| 2055A | KISTLER |
| Vehicle Speed (km/h) | Steering Resistance Torque (N·m) | Drivers’ Preferred Steering Torque (N·m) | Required Current of EPS (A) |
|---|---|---|---|
| 0 | 230.8 | 6 | 135.6 |
| 10 | 133.8 | 6.2 | 76.9 |
| 20 | 109.4 | 6.8 | 61.7 |
| 40 | 68.1 | 7.5 | 36.8 |
| 60 | 47.0 | 8.1 | 23.8 |
| 80 | 41.5 | 8.5 | 20.2 |
| 100 | 38.8 | 9 | 18.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, B.; Zhang, D.; Jiang, H.; Huang, Y. Optimization of Energy Management Strategy for the EPS with Hybrid Power Supply Based on PSO Algorithm. Energies 2020, 13, 428. https://doi.org/10.3390/en13020428
Tang B, Zhang D, Jiang H, Huang Y. Optimization of Energy Management Strategy for the EPS with Hybrid Power Supply Based on PSO Algorithm. Energies. 2020; 13(2):428. https://doi.org/10.3390/en13020428
Chicago/Turabian StyleTang, Bin, Di Zhang, Haobin Jiang, and Yinqiu Huang. 2020. "Optimization of Energy Management Strategy for the EPS with Hybrid Power Supply Based on PSO Algorithm" Energies 13, no. 2: 428. https://doi.org/10.3390/en13020428