The Catenary Method as an Alternative to the Horizontal Directional Drilling Trajectory Design in 2D Space


Abstract
:1. Introduction
- Pilot hole drilling
- Reaming
- Casing installation
- design of Horizontal Directional Drilling trajectory in two–dimensional space, with the following variations:
- ○
- trajectory being a combination of straight and curvilinear sections
- ○
- chain curve trajectory (catenary)
- ○
- an irregular curve trajectory
- design of Horizontal Directional Drilling trajectory in three–dimensional space
2. Mathematical Foundations of a Horizontal Trajectory Design in a Plane Perpendicular to the Terrain Surface
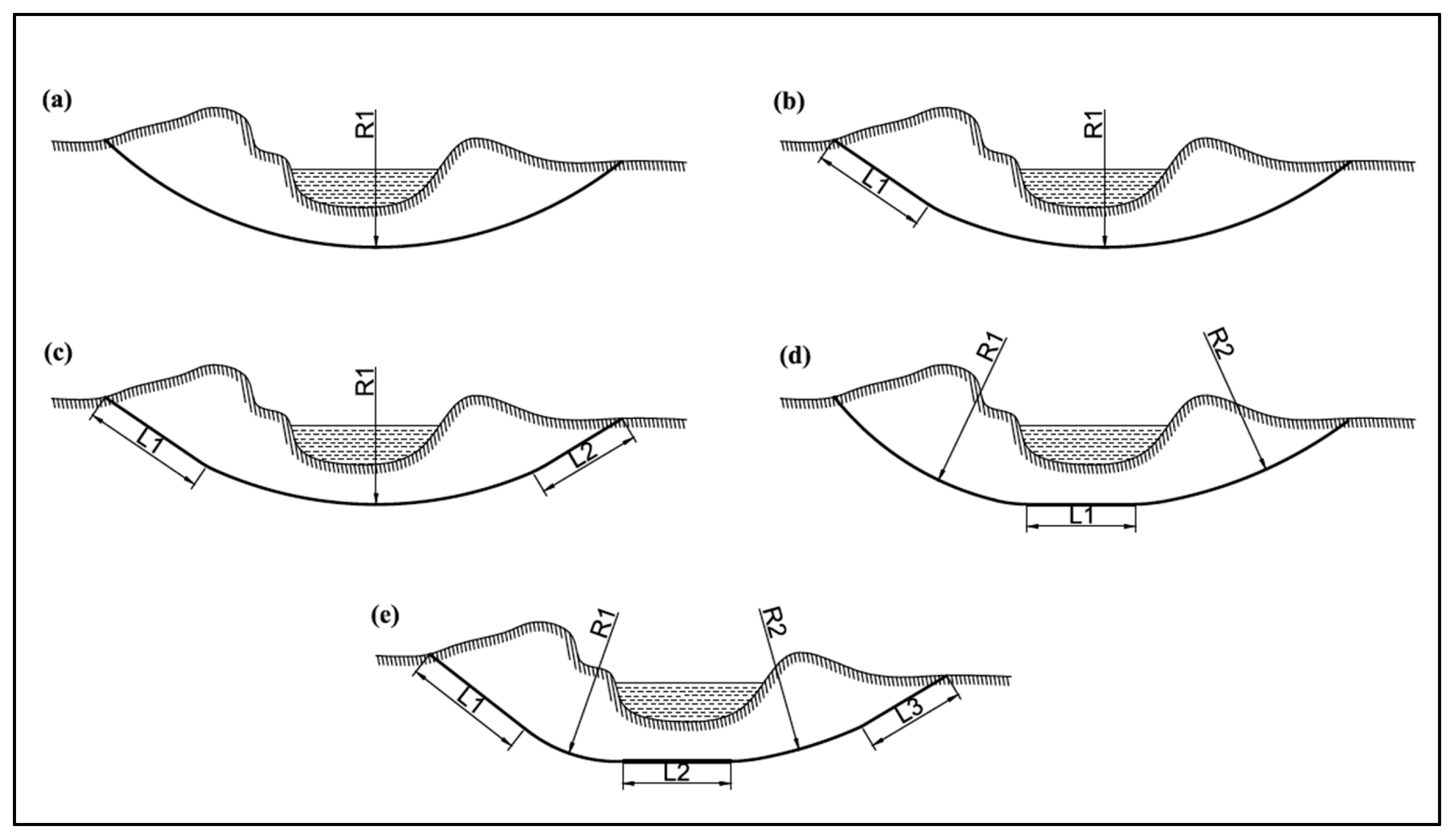
2.1. Trajectories Being a Combination of Straight and Curvilinear Sections
- vertical displacement of the end point relative to the start point:
- horizontal displacement of the end point relative to the start point:
- trajectory length:
- azimuth.
- radius of curvature:
- angle of curvature:
- projection of a trajectory section on a vertical plane:
- projection of a trajectory section on a horizontal plane:
- section length:
- projection of a trajectory section on a vertical plane:
- projection of a trajectory section on a horizontal plane:
- section length:
- global left–handed Cartesian coordinate system with the origin at the entry point of the wellbore. Axis orientation: OX—east geographical, OY—north geographical, OZ—vertical
- specified azimuth of the plane (β) constant for the whole trajectory (βL = β)
- rectilinear section εj = εj–1
- curvilinear section εj > εj–1
- rectilinear section εj = εj–1
- curvilinear section εj > εj–1
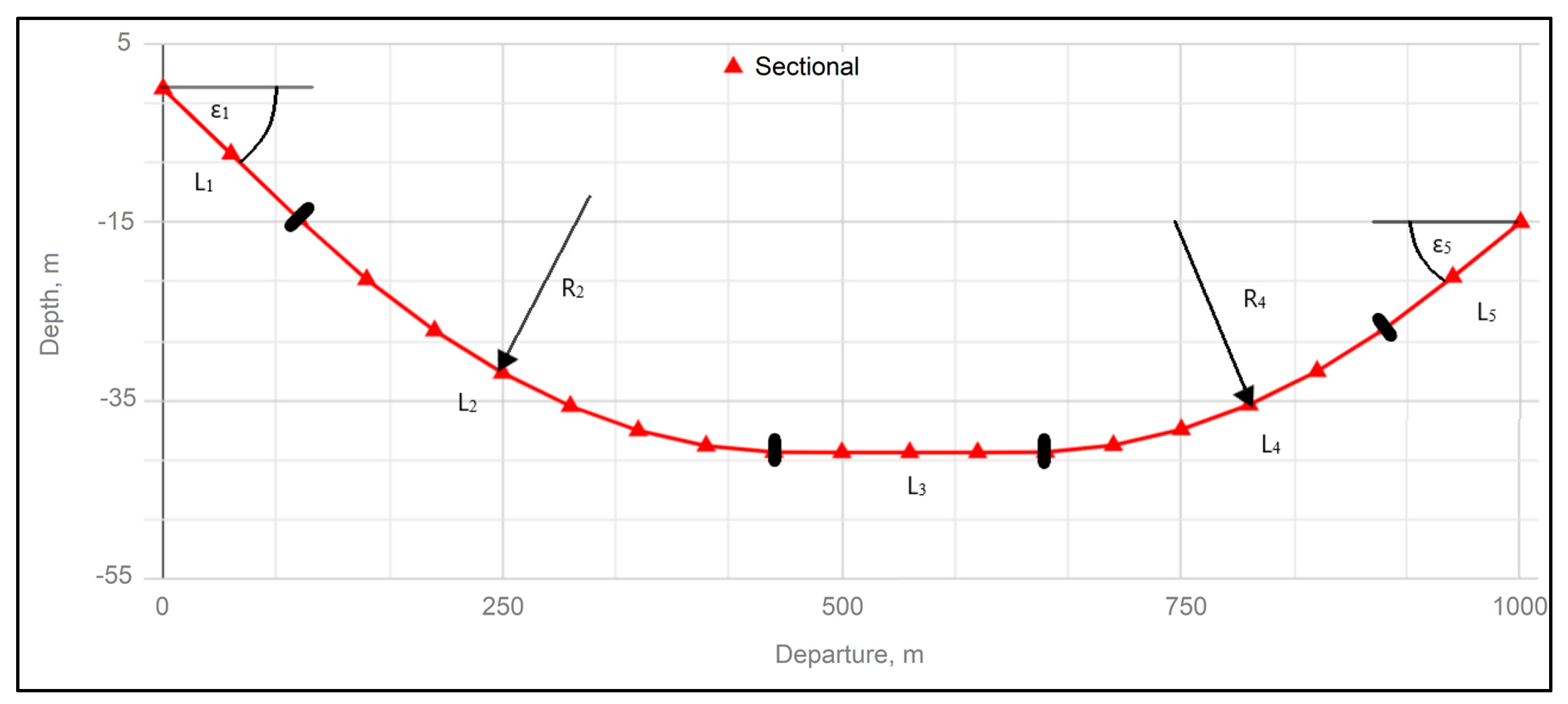
- Determination of input data (A, H, L1, R2, R4, ε1, ε3, ε5) and a calculation step.
- Calculation of the characteristic points according to the steps in Table 2.
- Transfer of calculation results from point 2 and definition of additional variables.
- Beginning of the iteration block associated with the hole section number.
- Calculation of the current abscissa value rounded down to an integer.
- Beginning of the nested iteration block. Check if variable X has not exceeded the range, if so, go to point 9.
- Calculation of spatial coordinates X, Y and the alpha angle depending on the type of section.
- Incrementation of loop variables and return to point 6.
- Add to Hsum and Asum values corresponding to a given section. Increment the section.
- Check if the section scope has not been exceeded, if not, return to step 4.
- End of algorithm.
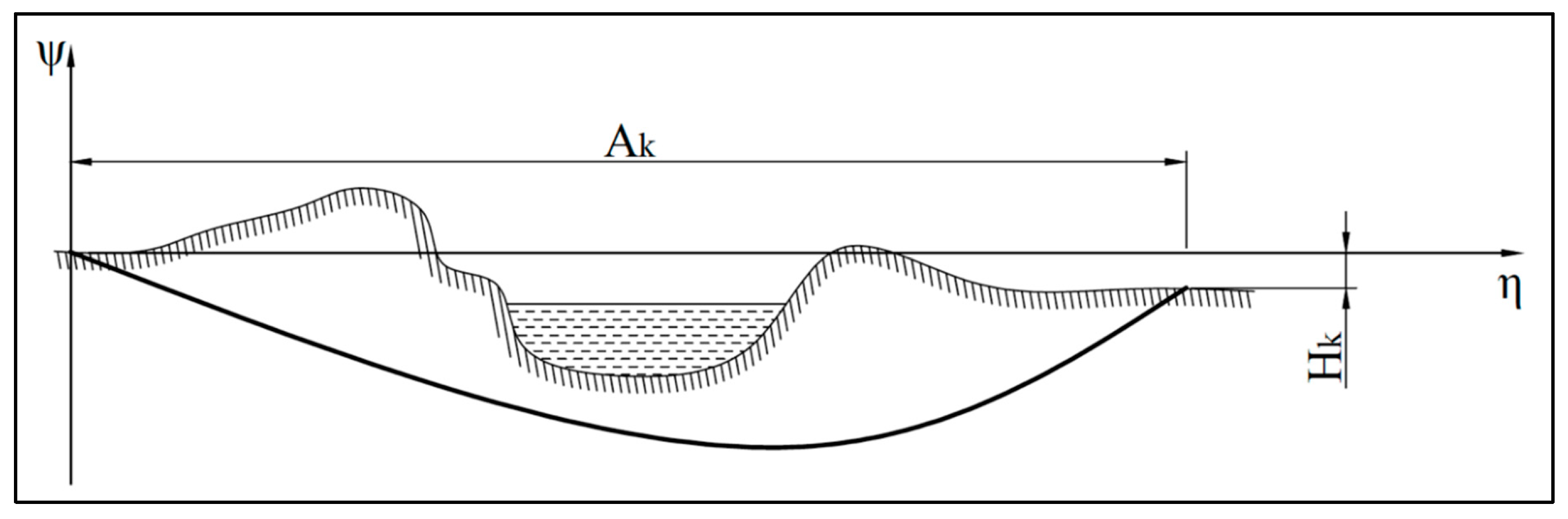
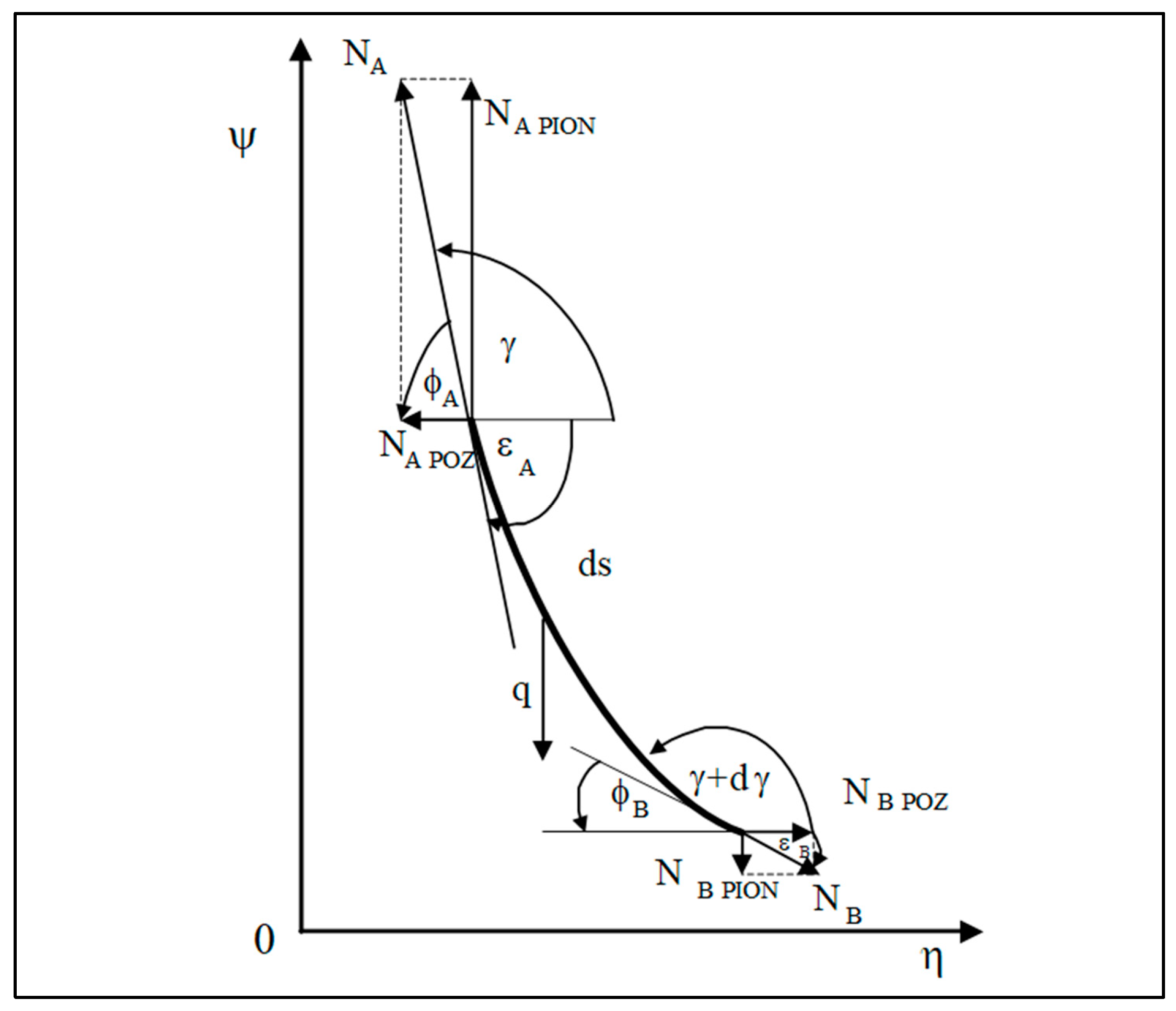
2.2. Chain Curve Trajectory (Catenary)
- global right–handed Cartesian coordinate system with the origin at the entry point of the wellbore. Axis orientation: OX—east geographical, OY—north geographical, OZ—vertical.
- specified azimuth of the plane (β) constant for the whole trajectory (βL = β)
3. Calculation Example
3.1. Assumptions:
3.1.1. Chain Curve Trajectory (Catenary):
3.1.2. Trajectory Being a Combination of Straight and Curvilinear Sections:
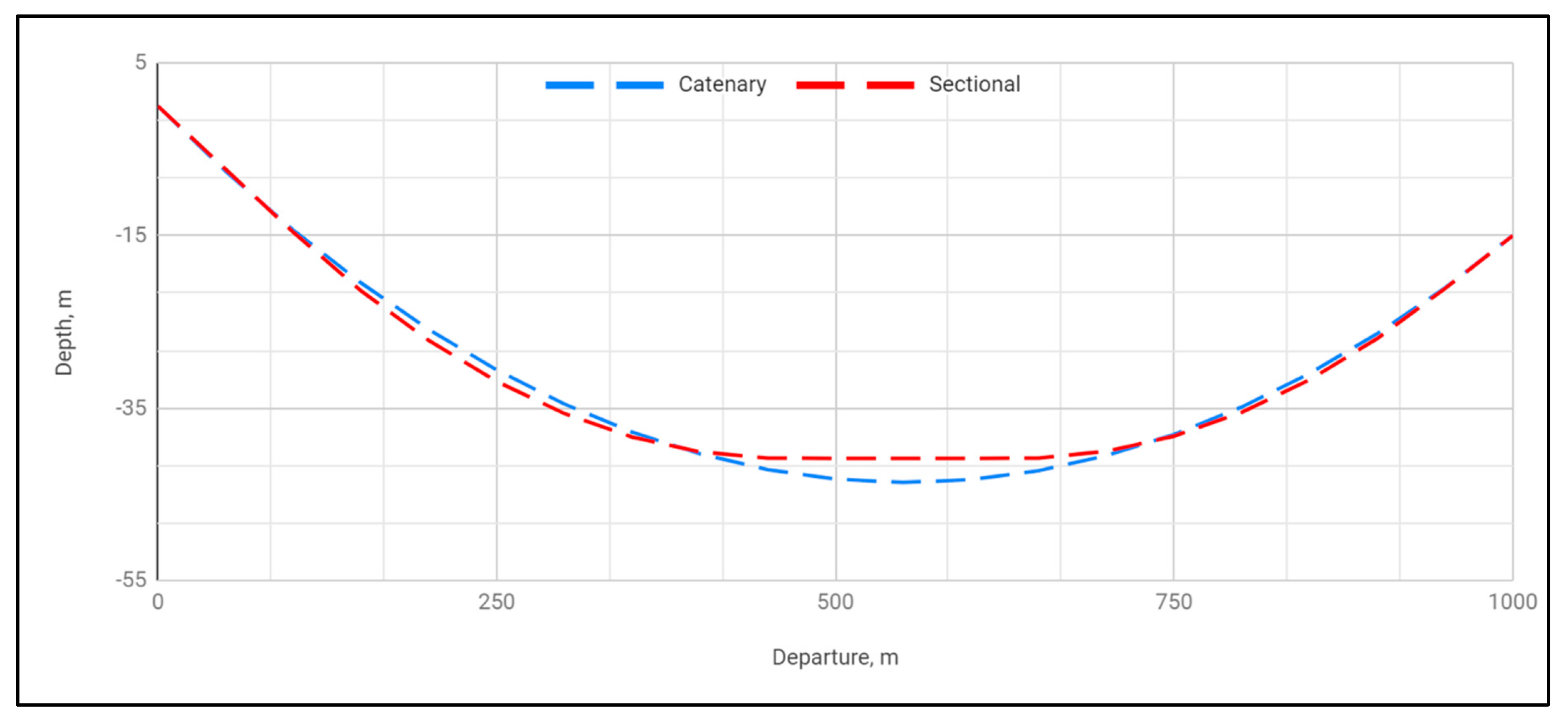
3.2. Results
4. Conclusions
- HDD is a dynamically developing technology for constructing underground pipelines This is due to the fact that this type of drilling can be performed in urban and hard–to–reach areas. Horizontal directional drilling is an alternative to microtunneling, direct pipe and jacking. At the same time, the HDD technology enables minimization of a negative impact on the environment compared to conventional methods.
- A very attractive alternative to standard design solutions is the concept of a chain curve trajectory (catenary), which enables easier insertion of the pipeline into a wellbore and ensures its longer life due to the natural stress distribution along the length.
- The algorithms developed by the authors of the article at the AGH University of Science and Technology at the Faculty of Drilling Oil and Gas should be used in practice, as they reduce costs, failures, and complications during well drilling using the HDD technology.
- Based on given equations and project methodologies, the authors see the potential for expanding the topic in the area of trajectories optimization that will result in a trajectory that combines advantages of both design conceptions.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Aj | projection of the jth section on a horizontal plane | [m] |
| β | azimuth | [º] |
| DLSj | dogleg severity | [º/m] |
| δj | angle of curvature at the jth point of the hole | [º] |
| εj | angle of deviation from horizontal plane at the jth characteristic point | [º] |
| Hj | projection of the jth section/segment on a vertical plane | [m] |
| Lj | length of jth section/segment | [m] |
| Npoz | drilling rig pulling force | [N] |
References
- Pgnig Termika. Blok Gazowo–Parowy na Żeraniu. (ang. Combined Cycle Gas Turbine in the Żerań CHP). Available online: https://termika.pgnig.pl/node/288 (accessed on 2 January 2020).
- Pgnig. 2018—Kolejny Rok Mniejszego Importu Gazu z Rosji i Większego Importu LNG—Portal Korporacyjny. (ang. 2018—Another Year of Smaller Gas Imports from Russia and Larger LNG Imports—Corporate Portal). Available online: http://pgnig.pl/aktualnosci/–/news–list/id/pgnig–2018–kolejny–rok–mniejszego–importu–gazu–z–rosji–i–wiekszego–importu–lng/newsGroupId/10184 (accessed on 2 January 2020).
- Baltic Pipe. Harmonogram Projektu. (ang. Project Schedule). Available online: https://www.baltic–pipe.eu/pl/o–baltic–pipe/harmonogram–projektu/ (accessed on 2 January 2020).
- Drilling Contractors Association. Available online: https://dca–europe.org/index.php/en/verband/hdd–technik (accessed on 2 January 2020).
- Farr, A. The Birth and Development of Horizontal Directional Drilling. Available online: https://trenchlesstechnology.com/brief–history–horizontal–directional–drilling/ (accessed on 2 January 2020).
- How the HDD Industry Began—By Martin Cherrington. Available online: http://www.trenchlessdataservice.com/library/dbhistory.htm (accessed on 2 January 2020).
- Zwierzchowska, A. Przewierty sterowane i przeciski pneumatyczne—Bezwykopowa budowa sieci podziemnych cz. 2. (ang. Guided boring and pneumatic jacking—Trenchless construction of underground networks part 2). Nowocz. Bud. Inż. 2006. Available online: http://yadda.icm.edu.pl/baztech/element/bwmeta1.element.baztech–cff9fb9e–4174–4a3c–889c–b56f60681dab (accessed on 2 January 2020).
- Lueke, J.S.; Ariaratnam, S.T. Numerical characterization of surface heave associated with horizontal directional drilling. Tunn. Undergr. Space Technol. 2006, 21, 106–117. [Google Scholar] [CrossRef]
- Stein, D.; Mölers, K.; Bielecki, R. Microtunelling; Vch Verlagsgesellschaft Mbh: Weinheim, Germany, 1989. [Google Scholar]
- Allouche, E.N.; Como, C. Horizontal directional drilling technology, techniques and applications. In Proceedings of the NASTT/Univ. of Alberta Technical Seminar on Trenchless Technology, Alberta, Canada, 5 December 1997; pp. 18–26. [Google Scholar]
- Australian Drilling Industry Training Committee Limited the Drilling Manual; CRC Press: Boca Raton, FL, USA, 2015; ISBN 978-0-429-15054-8.
- Peace River HDD Intersect Project. Available online: https://www.trenchlessinternational.com/2010/03/17/peace–river–hdd–intersect–project/ (accessed on 2 January 2020).
- Wiśniowski, R.; Druzgała, A.; Formela, M.; Toczek, P. Intersect Drilling Method; SGEM: Vienna, Austria, 2018; Volume 18. [Google Scholar]
- Jariwala, S.; Pitroda, J.; Bhavsar, J. Horizontal Directional Drilling: New Era for Underground Utilities. In Proceedings of the National Conference CRDCE13, SVIT, Vasad, India, 20–21 December 2013. [Google Scholar]
- Wiśniowski, R.; Ziaja, J. Projektowanie wielkogabarytowych horyzontalnych przewiertów sterowanych. (ang. Design of large–size Horizontal Directional Drilling). Wiert. Nafta Gaz 2007, 1, 609–618. [Google Scholar]
- Bielecki, R.; Schreyer, J. Guidelines for Selecting Construction Methods for Eart–Laid Lines under Environmentally Relevant and Economic Aspects. Gstt–Dokumentation. Trenchless Layning And Repairing Pipes In Germany; GSTT: Hamburg, Germany, 1997. [Google Scholar]
- Willoughby, D. Horizontal Directional Drilling: Utility and Pipeline Applications; McGraw–Hill: New York, NY, USA, 2005; ISBN 978-0-07-145473-5. [Google Scholar]
- Wiśniowski, R.; Stryczek, S. Projektowanie trajektorii horyzontalnego przewiertu sterowanego. (ang. Horizontal Directional Drilling trajectory design). Wiert. Nafta Gaz 2007, 2, 929–941. [Google Scholar]
- Wiśniowski, R.; Ziaja, J. Methods of determining admissible bending radius for HDD drill string. Acta Montan. Slov. 2004, 9, 340–343. [Google Scholar]
- Wiśniowski, R. Selected Aspects of Directional Wells Construction Design with the Use of Numeric Methods; AGH: Kraków, Poland, 2002. [Google Scholar]
- McClendon, R.T. Directional drilling using the catenary method. In Proceedings of the SPE/IADC Drilling Conference, New Orleans, Louisiana, 5–8 March 1985. [Google Scholar] [CrossRef]
- Liu, X.; Samuel, R. Catenary well profiles for ultra extended–reach wells. Proc. SPE Annu. Tech. Conf. Exhib. 2009, 3. [Google Scholar] [CrossRef]
- Aadnoy, B.S.; Toff, V.; Djurhuus, J. Construction of ultralong wells using a catenary well profile. In Proceedings of the IADC/SPE Drilling Conference, Miami, FL, USA, 21–23 February 2006. [Google Scholar] [CrossRef]
- Hui, L.; Yan, W.; Juan, W.; Zhongming, L.; Tao, X. Long horizontal section of horizontal well section optimization design research. Res. J. Appl. Sci. Eng. Technol. 2013, 6, 156–159. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Type of Equipment | Pulling Force [kN] | Torque [Nm] | Power [kW] | Maximum Mud Flow Rate [l/min] | Type of Horizontal Drilling |
|---|---|---|---|---|---|---|
| 1 | very small | <100 | <2500 | <75 | 100 | Small |
| 2 | small | 100–250 | <2500–15000 | 75–150 | 500 | Medium |
| 3 | medium | 250–500 | 15000–25000 | 150–300 | 1000 | |
| 4 | large | 500–1000 | 25000–50000 | 300–600 | 1500 | Large |
| 5 | extra large | >1000 | >50000 | >600 | >1500 |
| Variant I: A, H, L1, ε1, ε3, ε5, R2, R4 | |||
|---|---|---|---|
| Step | Value to be calculated | Step | Value to be calculated |
| 1 | H1 | 11 | DLS4 |
| 2 | A1 | 12 | L4 |
| 3 | H2 | 13 | L3 |
| 4 | A2 | 14 | H3 |
| 5 | δ2 | 15 | A3 |
| 6 | DLS2 | 16 | H5 |
| 7 | L2 | 17 | A5 |
| 8 | H4 | 18 | L5 |
| 9 | A4 | 19 | L |
| 10 | δ4 | – | – |
| [i] | X | Y | ε |
|---|---|---|---|
| 0 | 0 | 0 | −9 |
| 1 | 50 | −7.55 | −8.2 |
| 2 | 100 | −14.39 | −7.39 |
| 3 | 150 | −20.5 | −6.59 |
| 4 | 200 | −25.9 | −5.78 |
| 5 | 250 | −30.58 | −4.97 |
| 6 | 300 | −34.54 | −4.16 |
| 7 | 350 | −37.79 | −3.34 |
| 8 | 400 | −40.32 | −2.53 |
| 9 | 450 | −42.14 | −1.71 |
| 10 | 500 | −43.24 | −0.89 |
| 11 | 550 | −43.63 | −0.08 |
| 12 | 600 | −43.31 | 0.74 |
| 13 | 650 | −42.27 | 1.56 |
| 14 | 700 | −40.52 | 2.38 |
| 15 | 750 | −38.06 | 3.19 |
| 16 | 800 | −34.88 | 4.01 |
| 17 | 850 | −30.98 | 4.82 |
| 18 | 900 | −26.37 | 5.63 |
| 19 | 950 | −21.05 | 6.44 |
| 20 | 1000 | −15 | 7.24 |
| [i] | X | Y | ε |
|---|---|---|---|
| 0 | 0 | 0 | −8.33 |
| 1 | 50 | −7.32 | −8.33 |
| 2 | 100 | −14.64 | −8.3 |
| 3 | 150 | −21.42 | −7.15 |
| 4 | 200 | −27.17 | −5.99 |
| 5 | 250 | −31.91 | −4.84 |
| 6 | 300 | −35.64 | −3.69 |
| 7 | 350 | −38.37 | −2.54 |
| 8 | 400 | −40.09 | −1.4 |
| 9 | 450 | −40.81 | −0.25 |
| 10 | 500 | −40.83 | 0 |
| 11 | 550 | −40.83 | 0 |
| 12 | 600 | −40.83 | 0 |
| 13 | 650 | −40.8 | 0.3 |
| 14 | 700 | −40.03 | 1.45 |
| 15 | 750 | −38.26 | 2.6 |
| 16 | 800 | −35.49 | 3.75 |
| 17 | 850 | −31.72 | 4.89 |
| 18 | 900 | −26.93 | 6.05 |
| 19 | 950 | −21.14 | 7 |
| 20 | 1000 | −15 | 7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wiśniowski, R.; Skrzypaszek, K.; Łopata, P.; Orłowicz, G. The Catenary Method as an Alternative to the Horizontal Directional Drilling Trajectory Design in 2D Space. Energies 2020, 13, 1112. https://doi.org/10.3390/en13051112
Wiśniowski R, Skrzypaszek K, Łopata P, Orłowicz G. The Catenary Method as an Alternative to the Horizontal Directional Drilling Trajectory Design in 2D Space. Energies. 2020; 13(5):1112. https://doi.org/10.3390/en13051112
Chicago/Turabian StyleWiśniowski, Rafał, Krzysztof Skrzypaszek, Paweł Łopata, and Grzegorz Orłowicz. 2020. "The Catenary Method as an Alternative to the Horizontal Directional Drilling Trajectory Design in 2D Space" Energies 13, no. 5: 1112. https://doi.org/10.3390/en13051112
APA StyleWiśniowski, R., Skrzypaszek, K., Łopata, P., & Orłowicz, G. (2020). The Catenary Method as an Alternative to the Horizontal Directional Drilling Trajectory Design in 2D Space. Energies, 13(5), 1112. https://doi.org/10.3390/en13051112