1. Introduction
In recent years, due to the needs of renewable energy and smart grid construction, power storage technology, as a new regulatory means, has been highly valued because of its flexible control and convenient use [
1,
2]. At this stage, with the continuous installation of large-capacity equipment into the network, the stable grid connection of energy storage systems is also critical [
3,
4]. In energy storage systems, energy transmission, power balance, and stability of the DC bus voltage are the key links of the system grid connection [
5]. As the DC link voltage is an intermediate link for energy transmission and conversion of the energy storage grid-connected system, its stability directly affects whether the system-side converter and the grid-side converter can achieve independent control, but also directly affects whether the system can operate safely and stably. Therefore, the design of grid-connected inverter control system is the core of the whole grid-connected system. Grid-connected inverter is a power electronic converter to realize DC-AC conversion, and it is the core device to connect the system and power grid [
6]. In many energy storage equipment, the super-capacitor has become the leader of energy storage system, whether in the field of power suppression or low-voltage ride-through, it has demonstrated its unique advantages [
7].
For the grid-connected energy storage system, the traditional control method is usually the voltage and current double loop control of proportional integral (PI) regulator, which has the advantages of a simple control structure and being easy to realize. However, in the case of strong coupling, strong nonlinearity, severe unknown disturbance and system parameters changing, the traditional PI control also makes it difficult to achieve the ideal control effect. For this reason, Reference [
8] proposed an active disturbance control technology, only the rough model of the controlled object and the input and output signals of the system, which can design Extended State Observer (ESO) to observe the total disturbance and unmodeled error of the system [
9], and make feed-forward compensation in the control quantity, so it has good engineering adaptability and robustness. There are successful application examples in many fields, such as wind power generation system, permanent magnet synchronous motor torque control system [
10].
ESO is the key link that affects the performance of Active Disturbance Rejection Control (ADRC). In Reference [
11], the convergence and boundedness of the observation error of LESO are systematically analyzed when the dynamic model of the system is known or unknown. In Reference [
12], the tracking and estimation ability of high-order ESO for sinusoidal signals is analyzed. Reference [
13] simplified the structure of nonlinear ADRC and proposed a LADRC method. The parameters of ADRC are simplified into controller bandwidth and observer bandwidth by pole assignment method. The anti-interference and stability of ADRC are studied in frequency domain. Reference [
14] analyzes the dynamic tracking estimation capability and filtering characteristics of LESO from the frequency domain characteristics. Based on this, the closed-loop transfer function and frequency band characteristic curve of LADRC are obtained, and then the stability of the controller is analyzed systematically, the ability to suppress external disturbances and the uncertainty of control input gain are discussed, and the relationship between the above dynamic characteristics and parameter configuration is discussed. However, with the development of industry, traditional LADRC also shows some shortcomings. In Reference [
15], the observation of disturbance by LESO is greatly affected by noise with the increase of frequency, which affects the performance of the controller. Therefore, it is necessary to improve the traditional control method to ensure the stable control of the DC-side bus voltage of the energy storage system.
In this paper, the control of DC-side bus voltage of grid-connected inverter with super-capacitor energy storage is studied. Firstly, the modeling process of grid-connected inverter with energy storage is introduced. Based on the analysis of traditional LADRC control method, an improved second-order LADRC controller based on proportional differential is designed. Then, the dynamic process and anti-interference performance of grid-connected inverter with energy storage under the control of improved LADRC and traditional LADRC are compared and analyzed by theoretical proof. Finally, the controller designed in this paper is verified by Matlab/Simulink simulation.
2. Mathematical Modeling of Grid-Side Inverter of Energy Storage System
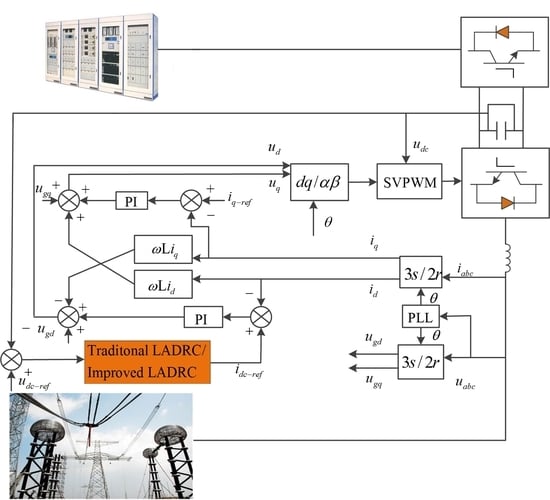
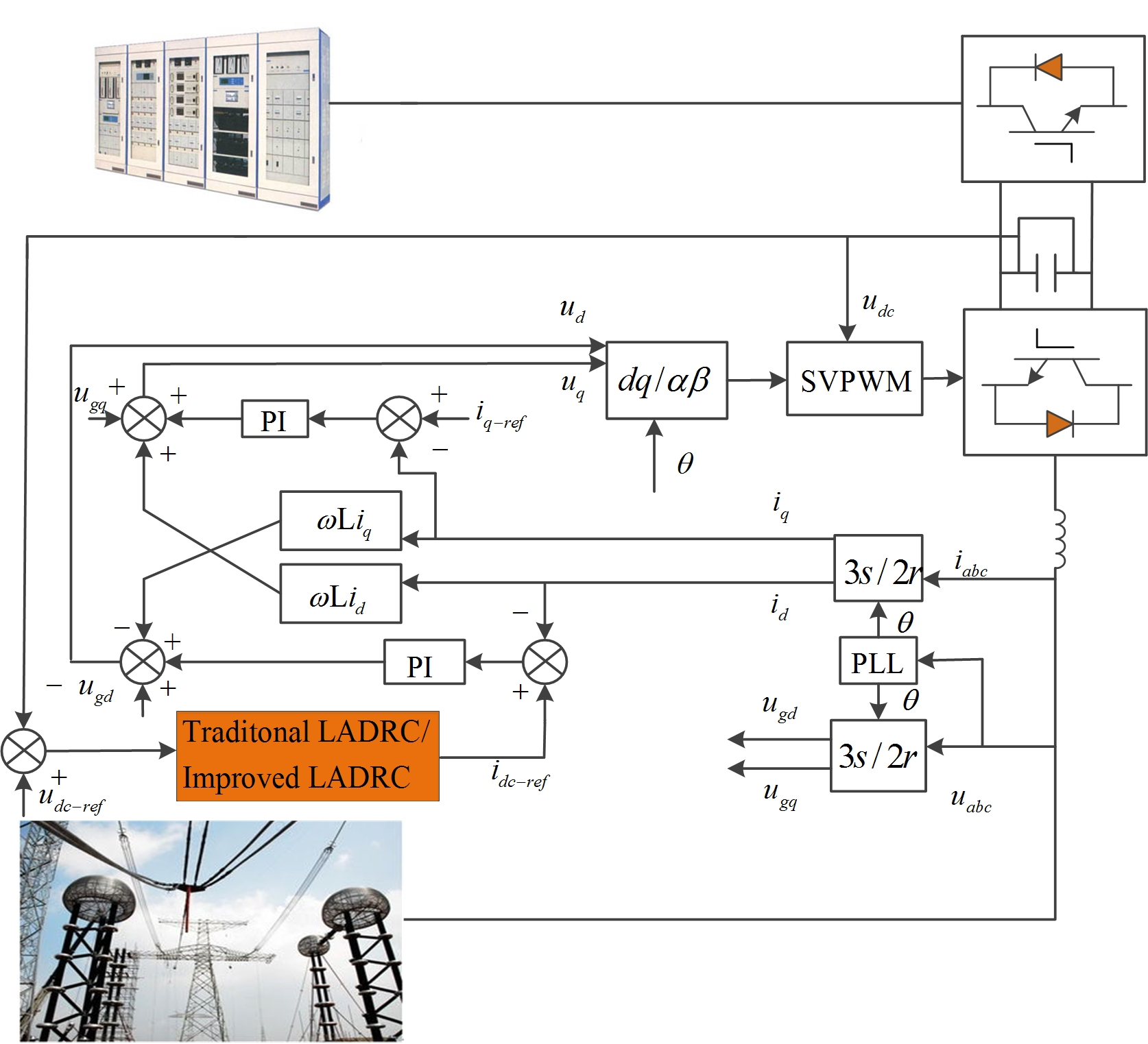
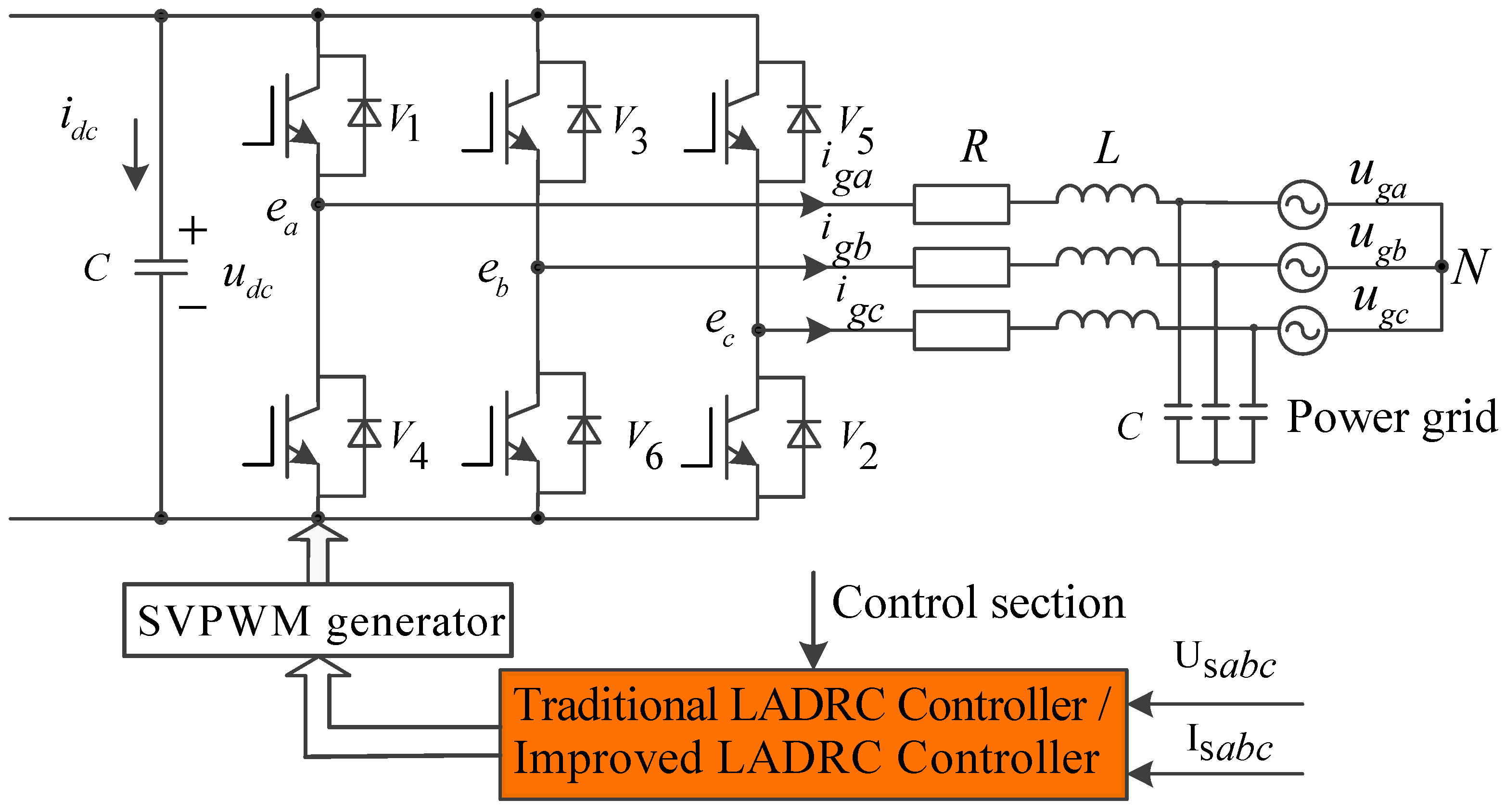
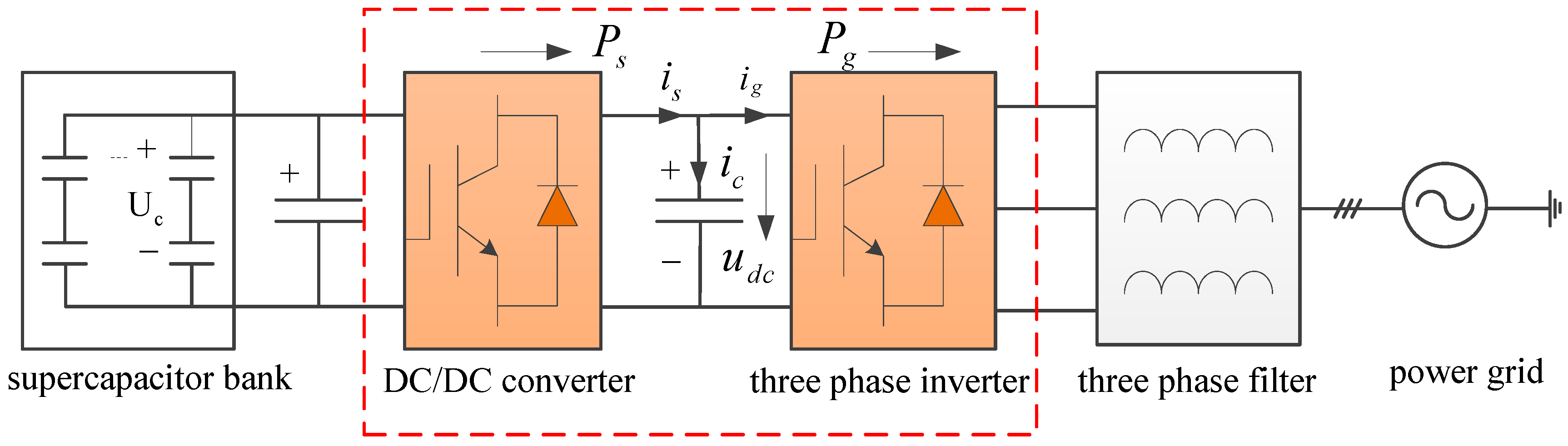
The overall control structure of the grid-side inverter of the energy storage system [
16] is shown in
Figure 1, where
is representative of the voltage of the DC side bus and
is the current through the DC bus capacitor;
is the internal resistance of the filter inductance,
is the filter inductance and
is the filter capacitance;
,
and
are representative of the three-phase grid voltage;
,
and
are the output current of the inverter, respectively;
are wholly controlled switching devices Insulated Gate Bipolar Transistors (IGBTs) on the six bridge arms of the inverter.
,
, and
are AC output voltages of the converter;
depict three-phase voltage at the inverter side and output side, and
is the three-phase current output. The control structure of grid-connected inverter has two parts: the Space Vector Pulse Width Modulation (SVPWM) hardware layer, and the control layer, which control methods are traditional Linear Active Disturbance Rejection Control (LADRC) and improved LADRC.
The reference direction is set as the incoming current direction. According to the main circuit equivalent model, the voltage equation of grid-connected inverter is as follows [
17,
18]:
It can be seen from Equation (1) that the design of the control system is complicated because the three-phase current is coupled with each other and is time variable in the time domain. Therefore, the coordinate transformation method is used to transform the mathematical model of converter in three-phase static coordinate system into two-phase synchronous rotation coordinate system. The transformation matrix is as follows:
In Equation (2), is the phase angle of transformation, that is, the angle between the axis in the static three-phase coordinate system and the axis in the rotating coordinate system, where is the initial phase angle.
After
transforming Equation (1), the grid-side grid-connected inverter voltage equation in the synchronous rotating coordinate system is obtained:
In Equation (3), where
and
represent the components of grid voltage on the
-axis respectively;
and
represent the components of the grid current on the
-axis;
and
represent the components of the inverter output voltage on the
-axis. If the phasor is three-phase symmetrical, the projection on axis
is
, and the projection on axis
is 0, then the output voltage
,
,
of grid-side grid-connected inverter is the amplitude of phase voltage, and Equation (3) can be simplified as follows:
If the reference voltage and power are selected, and the system parameter adopts the unit value, the instantaneous output power of grid-connected inverter [
19] can be obtained:
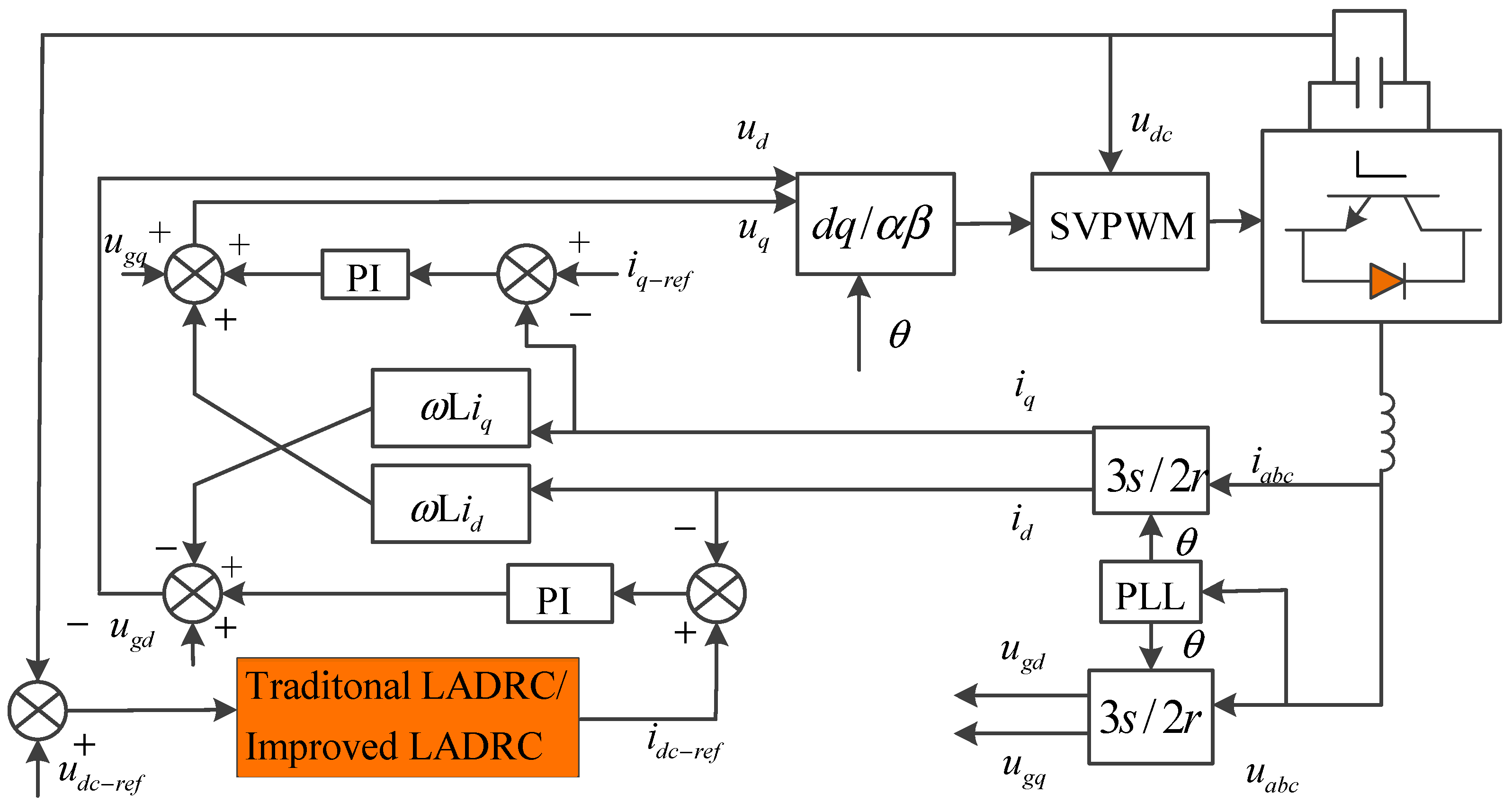
If the grid voltage is stable, the decoupling control of active power and reactive power can be realized by changing the
and
axis components of grid current. In the
coordinate system, the calculated reference current is compared with the actual current output from the grid, and the deviation value of the current is obtained. After PI regulator, the command voltage is obtained, and then it is transformed from the rotating coordinate system to the static coordinate system. Finally, the on–off of the switching tube is controlled by SVPWM to control the DC-side bus voltage. The control structure of grid-side grid-connected inverter is shown in
Figure 2.
In the actual project, the grid connection of the system will be realized through a grid connection switch to realize the grid connection and off grid operation of the energy storage system [
20]. When the grid voltage drops, the voltage of the grid-connected inverter also decreases. If the original input power is maintained, it will exceed the upper limit of the current regulation, which will inevitably lead to the increase of the grid-connected output current, and components will be destroyed by over-current at this time. If the control current is below the upper limit, it will lead to the imbalance of the input and output power, resulting in the sharp rise of the DC-side voltage. Therefore, the impact of grid voltage sags on the transient characteristics of grid-connected energy storage systems will be analyzed from the perspective of energy. The schematic is shown in
Figure 3.
The active power
of the super-capacitor energy storage system is input into the intermediate DC bus after passing through the DC/DC converter, ignoring the loss of the DC/DC converter, and the output power
of the energy storage system is equal to the grid-connected input power, which can be expressed by the following equation:
In Equation (6), where is the DC current output by DC/DC converter.
The current
flowing through the DC-side capacitor is:
If the losses of the grid-connected inverter and the AC-side reactor are not considered, then the power input by the inverter from the DC-side to the grid can be expressed by Equation (8):
In Equation (8), and represent the and axis components of grid-side current, stands for grid-side input current.
When the grid voltage remains stable, the power of both sides of the grid-connected inverter keeps balance. From Equations (6), (7) and Equation (8) will be obtained:
The power stored in the DC-side bus capacitance
is:
From the analysis of Equation (9), it can be seen that under the normal condition of power grid, if the voltage at the DC-side remains unchanged, then the value is zero.
When the grid voltage drops suddenly, the output current of grid-connected inverter is generally required to be no more than 1.1 times of the rated value. In order to limit the damage of components of grid-connected inverter due to over-current, it is necessary to keep the output current of grid-connected inverter within the upper limit of control. Its and remain unchanged, the output power of grid connection will inevitably decrease, while the input power of energy storage system will not change in a short time, which will lead to power imbalance at both ends of grid-connected inverter, and it is likely that the DC-side capacitance will be continuously increased due to the injected power. If the capacitance voltage rises too high, the DC-side capacitance will be broken down, which will eventually lead to the collapse of the whole system. Therefore, it is very important to design a controller with excellent performance to ensure the stability of DC-side bus voltage for the safety of the whole system.
3. Principle Analysis of Traditional LADRC
Traditional LADRC takes LESO as the control core, and the advantage of LESO is low model degree [
13]. In addition to providing the observation values of all order state variables of the system, it can also estimate and compensate the total disturbance of the system in real time. When the estimation ability of LESO disturbance is enough, the system can be compensated into integral series type. Then, the expected performance index can be obtained through simple control rate.
3.1. Design of Traditional Third-Order LESO
Generally, the differential equation of the second-order system is taken as an example for analysis:
In Equation (11), where
is the input and
is output of the system,
represent external disturbance,
and
are the parameters of the system,
is the input control gain, and
is the gain estimate. Let
,
, define
as the system disturbance, and let
,
, the equation of the system can be obtained:
From Equation (12) we can get the following equation:
In Equation (13), where , and are the coefficients of the observer, respectively.
Take the control law of the system as:
The Linear State Error Feedback (LSEF) can be designed as [
13]:
In Equation (15), where and represent the proportional and differential control gains, respectively, and the system can be stabilized by selecting the appropriate proportional differential gain coefficient.
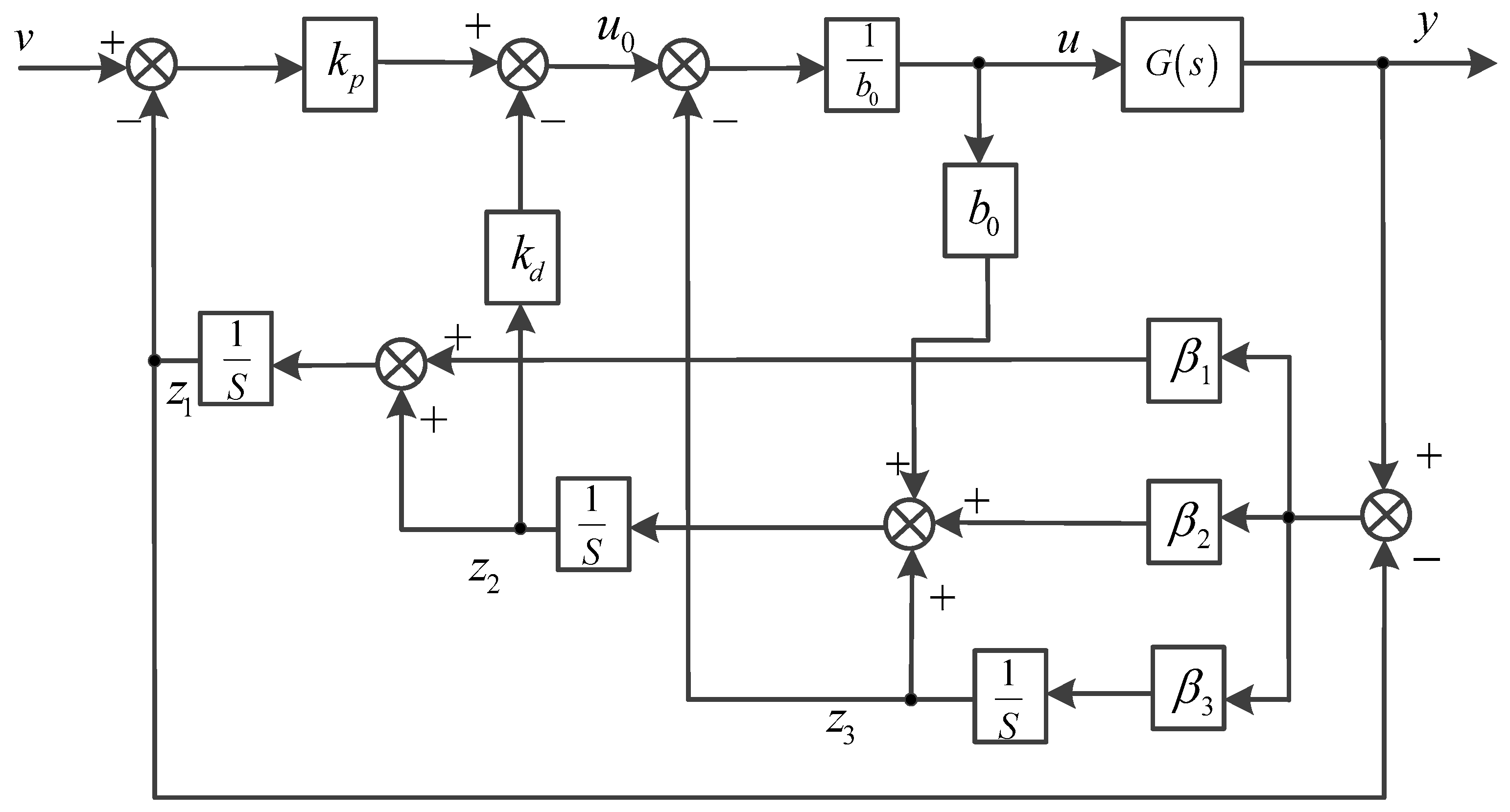
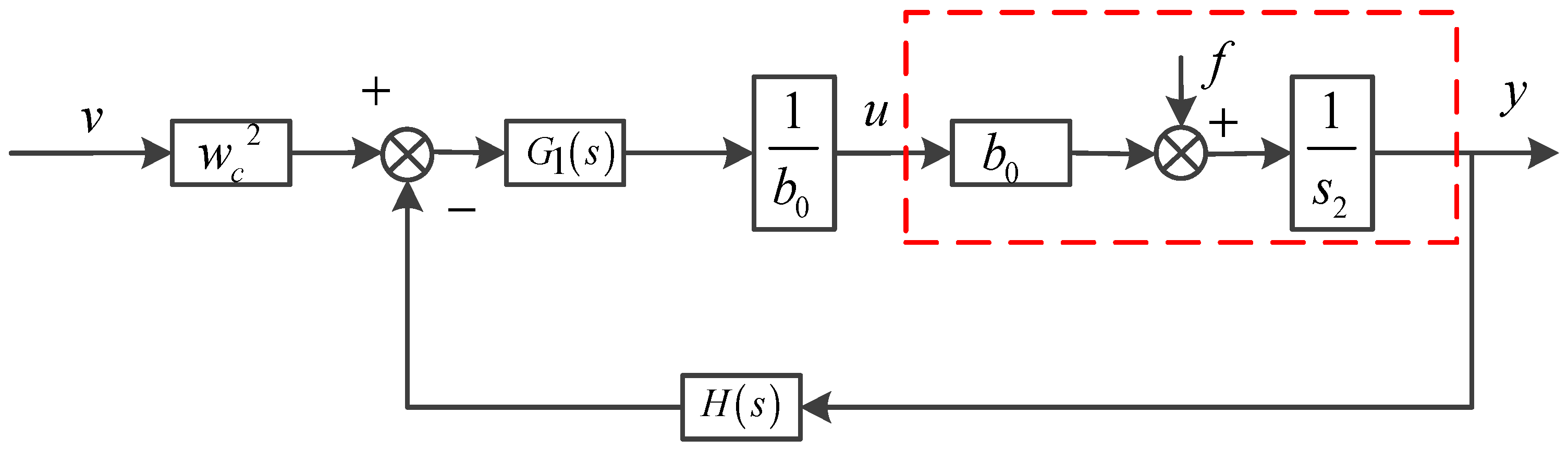
Equations (13), (14) and (15) constitute the structural block diagram of LADRC of system Equation (11), as shown in
Figure 4:
3.2. Parameter Tuning of Traditional Second-Order LADRC
In traditional LADRC, the parameters of LESO and Linear State Error Feedback (LSEF) rate are mainly adjusted [
13]. The parameters that need to be designed for the two are: observer gain coefficients
,
and
of LESO, and controller parameters
and
of LSEF. According to the separation principle [
21], parameter design can be performed for each part separately.
3.2.1. Parameter Design of Third-Order LESO
According to the pole configuration, the pole of Equation (13) is arranged on the bandwidth of the observer:
In Equation (17),
belongs to the observer bandwidth. Therefore, it is obvious from observation formula (17) that for LESO, only the parameter
needs to be designed. The larger
, the larger the observation bandwidth of LESO, and the better the tracking effect [
22]. However, during the parameter adjustment process, it will be found that too large
will also reduce the system’s immunity. Therefore, in actual engineering, the design of the observer bandwidth
should not be too large.
3.2.2. Parameter Design of LSEF
According to Reference [
14], a controller with linear Proportional Differential (PD) control is adopted, and the controller corresponding to the
order LESO can take the characteristic polynomial of the closed-loop system through parameterization:
In Equation (18), where
,
…,
represent the gain of the controller to be designed, respectively,
is the bandwidth of the controller. Through the above relationship, the proportional and differential gain of the controller can be obtained by determining the size of
. According to Equation (18), the gain of PD controller corresponding to third-order LESO can be obtained:
Therefore, after parameterization, the controller bandwidth is the only parameter that needs to be designed in the PD controller. A larger value of can make the output response of the system faster and the dynamic process time becomes shorter. However, in the process of adjusting the parameters, it will be found that too large a value of will increase the load of the PD controller, which will increase the sensitivity of the system to noise, and in severe cases will cause system instability. Therefore, in the application of actual engineering, it is necessary to design the system parameters reasonably in combination with the fastness and stability of the system.
For the controller used in this paper, in the process of adjusting parameters, the general principle is to keep unchanged, and then gradually increase , until the value of makes the effect of noise meet the system requirements. Then gradually increase , reduce when the influence of noise is unbearable, and then increase to achieve the desired control effect. Finally, through the experience of adjusting the aforementioned parameters, we can determine that the LADRC parameters of the voltage outer loop are = 3500 and = 500.
3.3. Performance Analysis of Traditional Third-Order LESO
According to Equations (13) and (17), the transfer functions of
,
, and
can be obtained:
Make the tracking errors
,
will be obtained:
Make
, according to Equation (12) will be configured as follows:
Considering the analysis typicality,
and
take the step signal
,
whose amplitude is
, then the steady-state error can be obtained as:
The above equation shows that LESO has good convergence and estimation ability.
The following further analyzes the dynamic tracking process. When
, the response of
in Equation (20) to step signal
will be:
By inverse Laplace transformation:
Make
get the extreme point as:
According to Equation (27), although does not affect the overshoot, it will affect the tracking speed of LESO. The larger is, the faster the system response is. Therefore, in order to improve the tracking speed, it is more likely to improve the . However, in the actual system, the size of is limited by the observation noise, and the increase of will also make the observation noise amplified, which will affect the control performance of the whole controller. Therefore, it is necessary to improve the traditional LADRC so that when increases, the effect of the observation noise on the system is relatively small.
4. Structural Design and Performance Analysis of Improved LADRC
4.1. Design Principle of Improved LESO
According to Equations (20) and (22), the third-order LESO disturbance observation transfer function can be obtained:
is a third-order system. Because the theoretical analysis of the third-order system is too complex, on the other hand, because its frequency characteristics are similar to the standard second-order system in the middle and low frequency range, the third-order system can be approximately equivalent to the second-order system for analysis:
is a second-order system, it can be proved that there is a contradiction between response speed and overshoot in time domain. In frequency domain, has the characteristics of phase lag and amplitude attenuation with the increase of frequency, which shows that the disturbance observation performance of traditional LESO is defective.
According to the comparison between Equation (29) and the standard second-order system, it can be seen that:
In Equation (30), where is the undamped natural oscillation angular frequency of the system while is the damping ratio of the system.
In the standard second-order system, the time response and frequency response mainly depend on and . From Equation (30), it can be seen that the changes of and affect the changes of , and gains, and the changes of gain can affect and at the same time. In short, among the three parameters, has the greatest impact on the system performance.
Through the above derivation and simple analysis, it can be seen that the traditional observation structure of LESO is similar to the standard second-order system, and there are some deficiencies in the structure, resulting in the increase of disturbance frequency, the observation ability of disturbance will be lower and lower. Therefore, an improved linear extended state observer is proposed by improving the observation gain coefficient
of traditional LESO in this paper, which can effectively reduce the decrease of disturbance observation amplitude and phase lag, and then improve the disturbance rejection ability of LADRC. The improved equation is as follows:
In Equation (31), where
and
are proportional differential coefficients, respectively, and the improved
includes the proportional differential link. At this time, the transfer function of disturbance observation can be expressed as:
Compared with Equation (32) and Equation (28), the most obvious change is the addition of a zero point. In the control theory, it can be understood as follows: in the time domain, the function of zero point is to reduce the peak time, speed up the response speed of the system, and the closer the zero point is to the virtual axis, the more obvious the effect is; in the frequency domain, a leading network is connected in series, which reduces the slope of amplitude decline and the degree of phase lag, and improves the stability of the system.
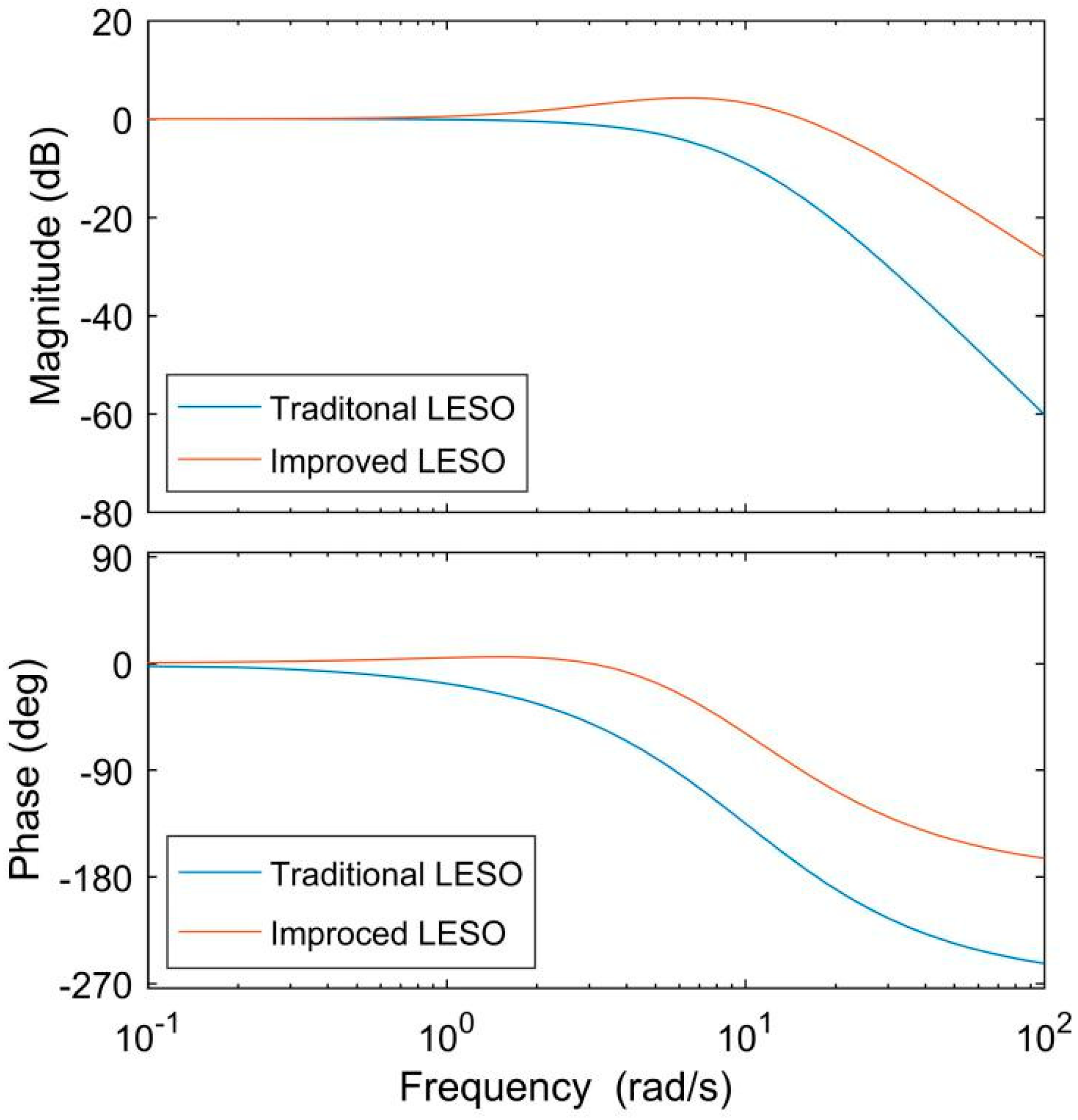
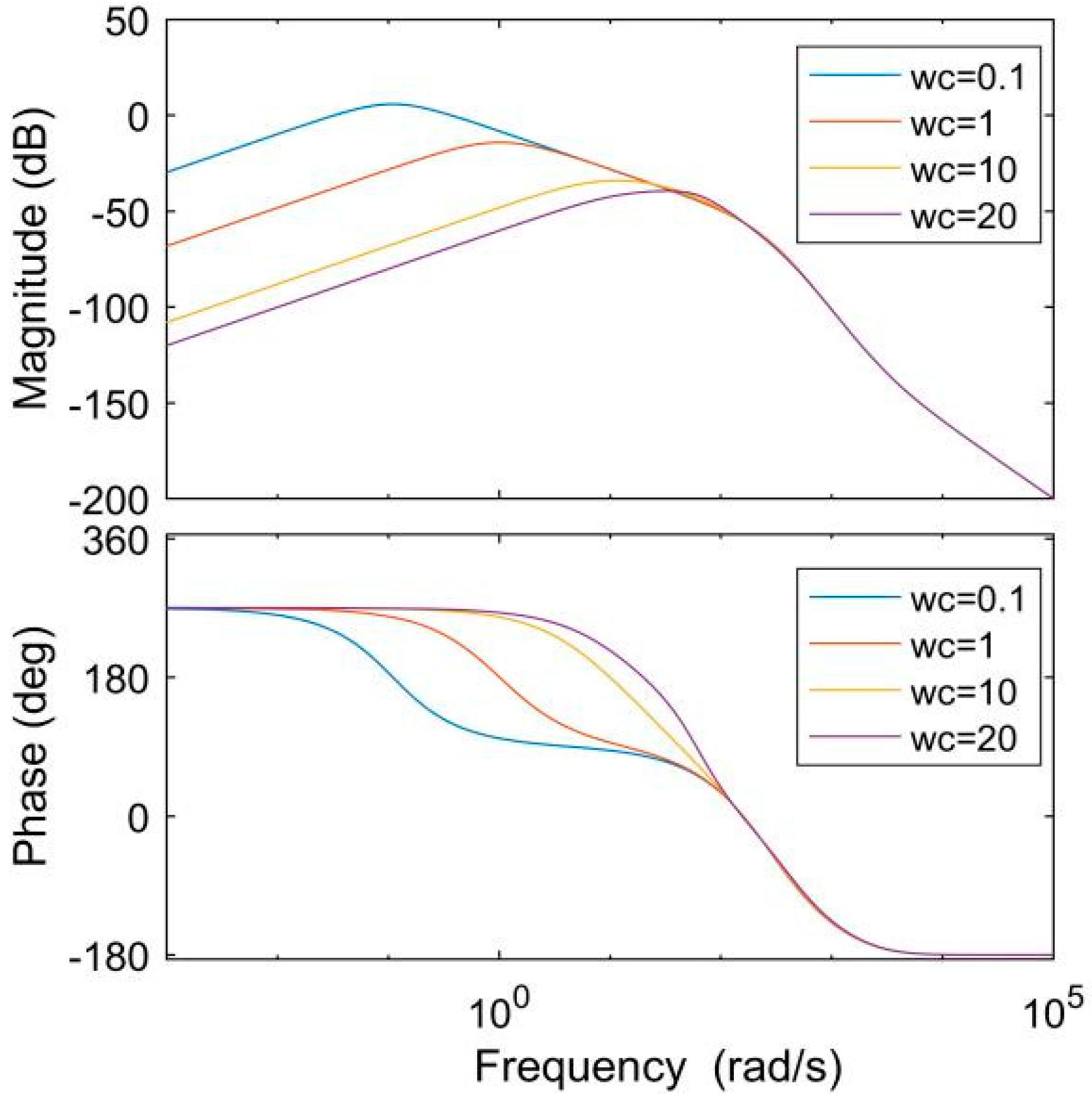
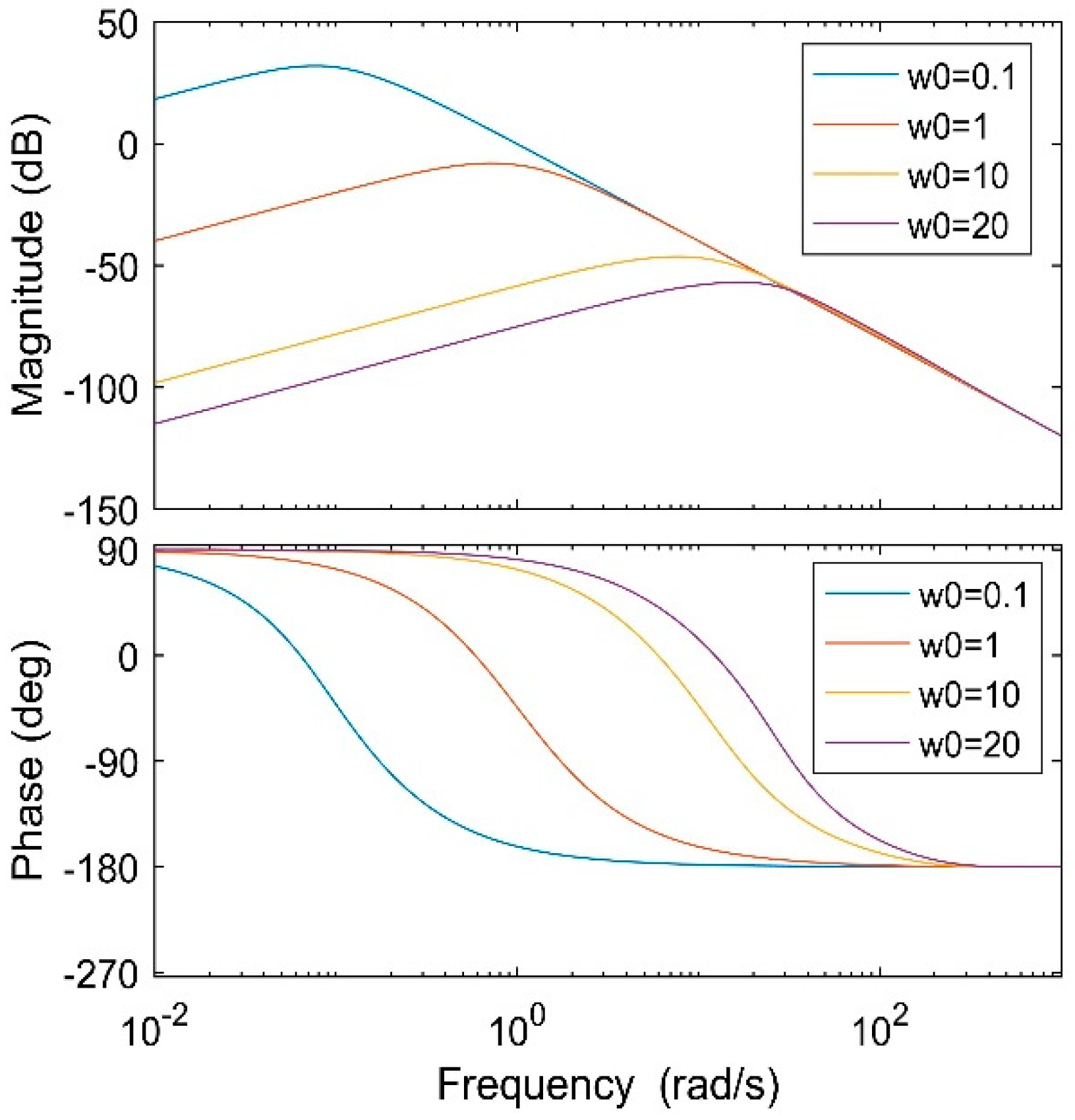
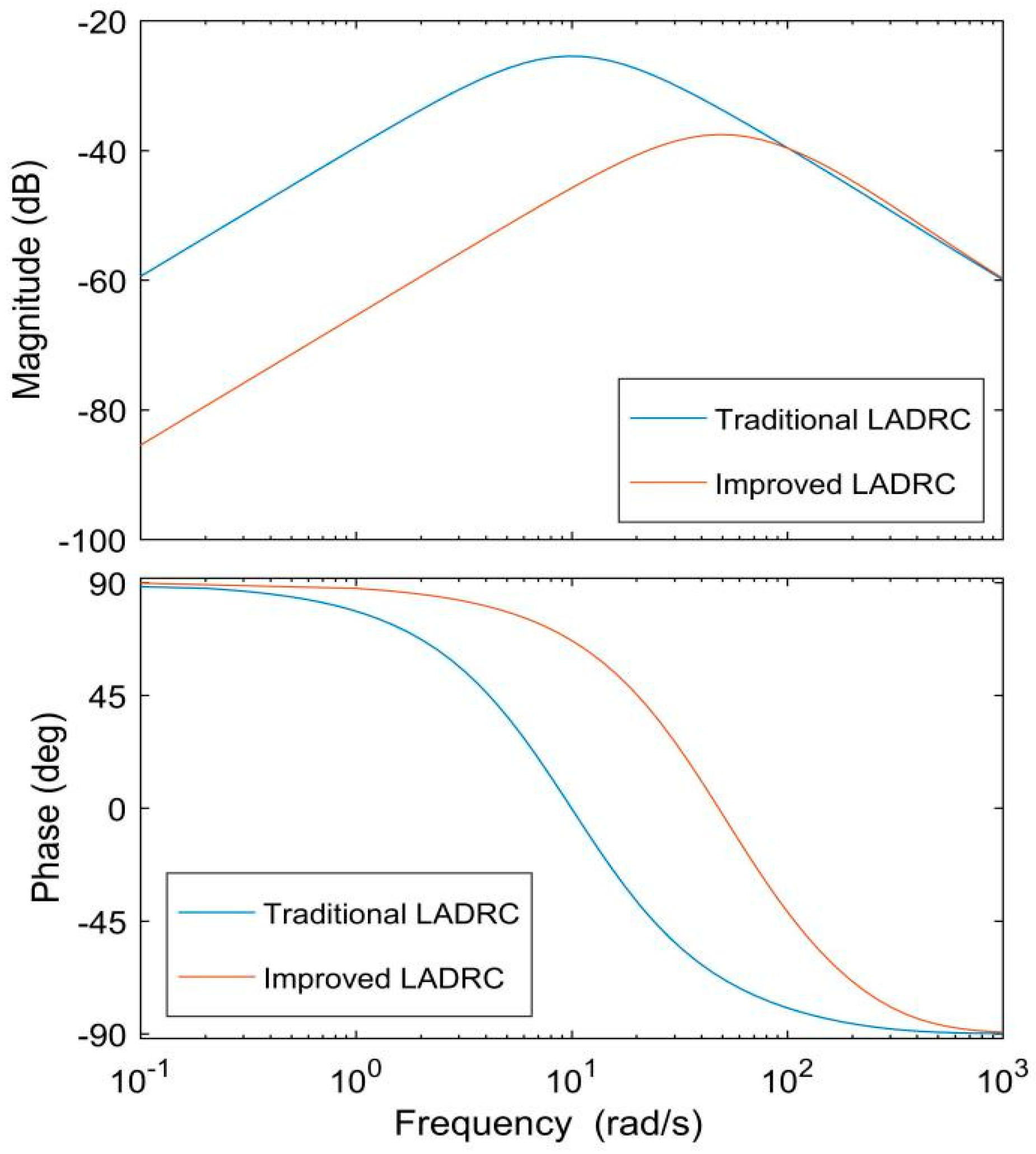
Figure 5 shows the amplitude frequency and phase frequency characteristic curve of the disturbance transfer function of traditional LESO and improved LESO. The bandwidth and phase characteristics in the middle and low frequency range do not change significantly with the increase of frequency, and the index attenuation capacity at the high frequency is obviously slowed down. Compared with traditional LESO, the observation ability of improved LESO to disturbance is improved, the slope of amplitude decrease and the degree of phase lag are reduced, and the stability of the system is improved. The feasibility and effectiveness of improved LESO are proved.
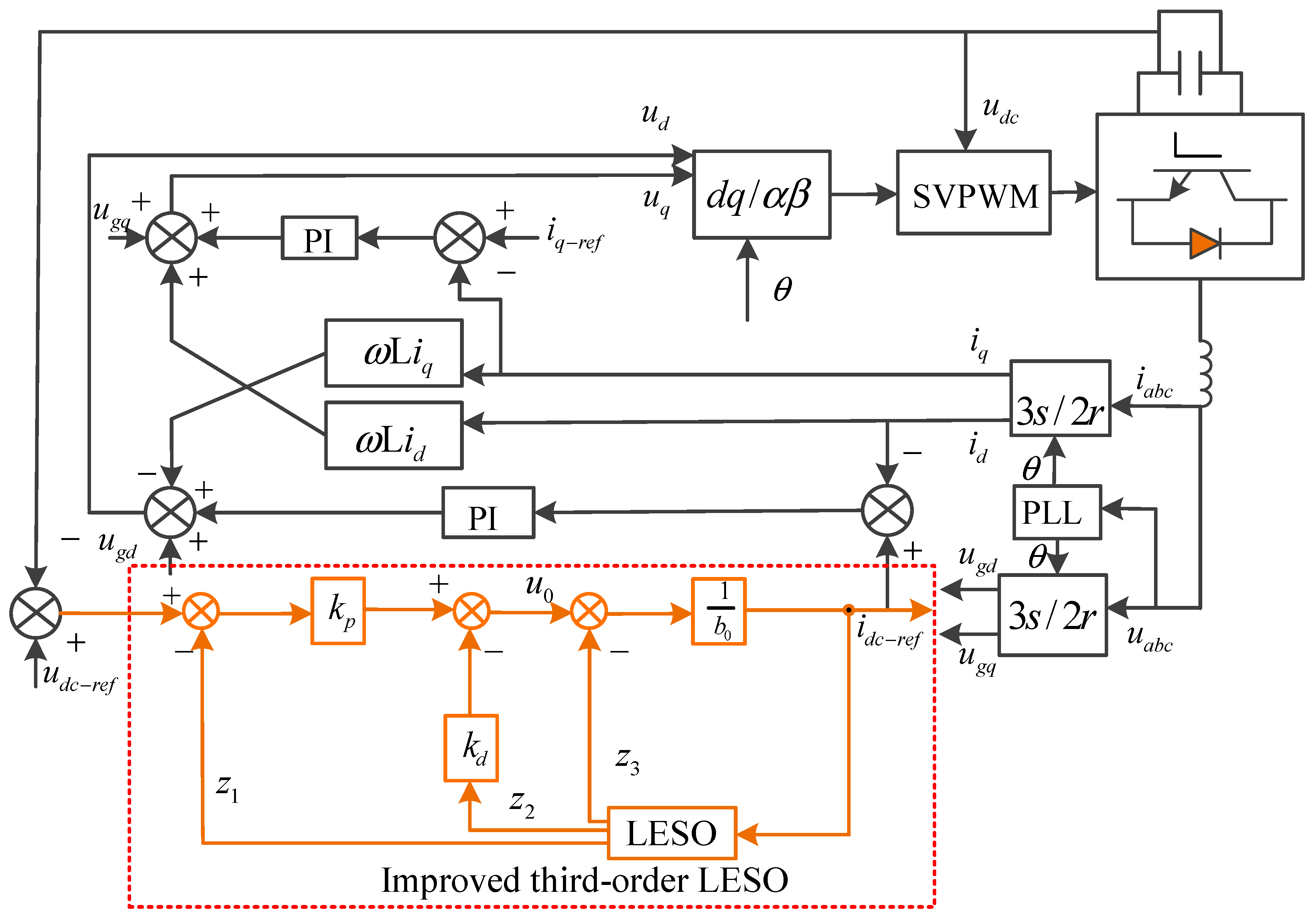
4.2. Structural Design of Improved LADRC
According to Equation (20) and Equation (31), the transfer functions of improved
,
and
can be obtained as follows:
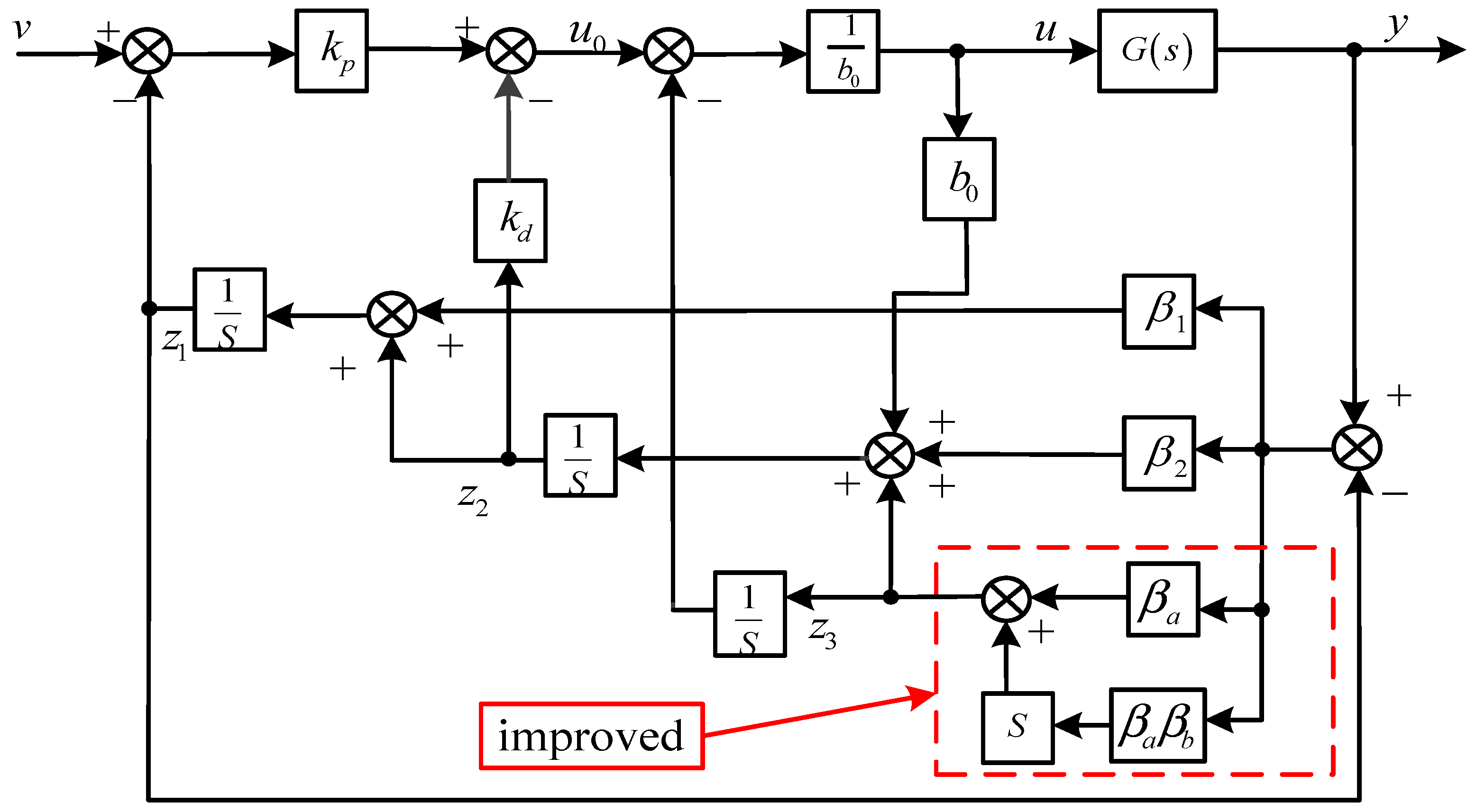
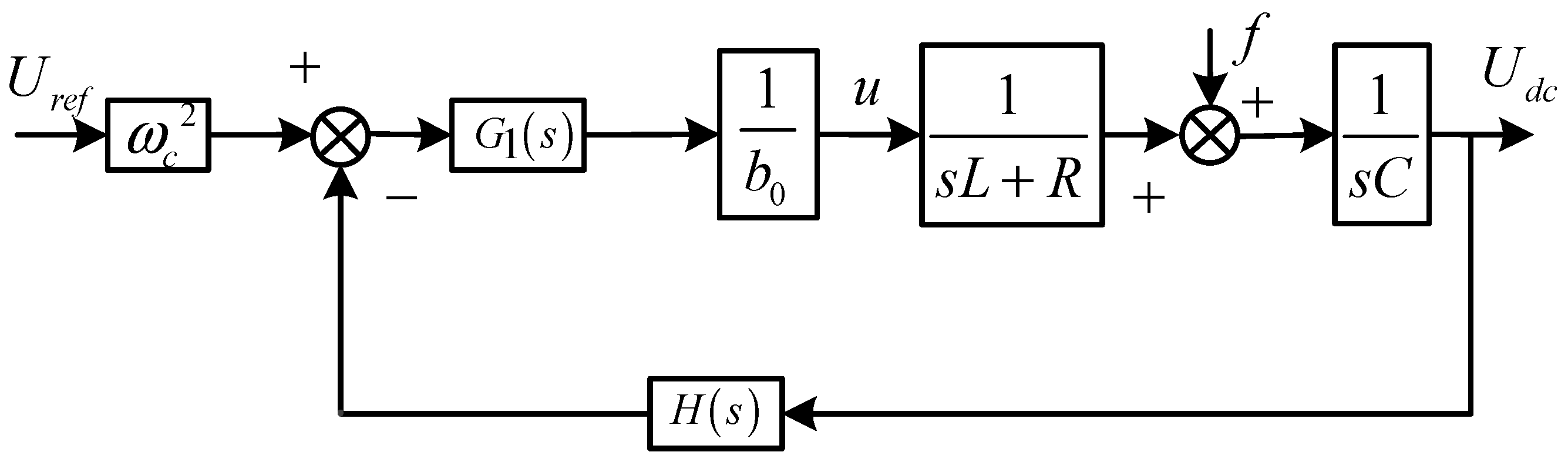
In conclusion, according to Equation (14) and Equation (32), the structure of improved LADRC control system is as follows
Figure 6:
Combining Equations (14), (15), and (19) can be expressed as the following equation:
Substituting Equation (33) into Equation (34) can be obtained as follows:
According to Equation (12), the controlled object can be recorded as:
Simultaneous Equation (35) and Equation (36) can simplify the improved LADRC control system to be:
According to
Figure 7, the closed-loop transfer function of the system can be obtained by using the superposition theorem as follows:
It can be known from Equation (37) that the output of the system is composed of a tracking term and a disturbance term. When the disturbance term is ignored, the system can achieve fast and no overshoot tracking of the reference input by adjusting the controller bandwidth and the observer bandwidth .
7. Conclusions
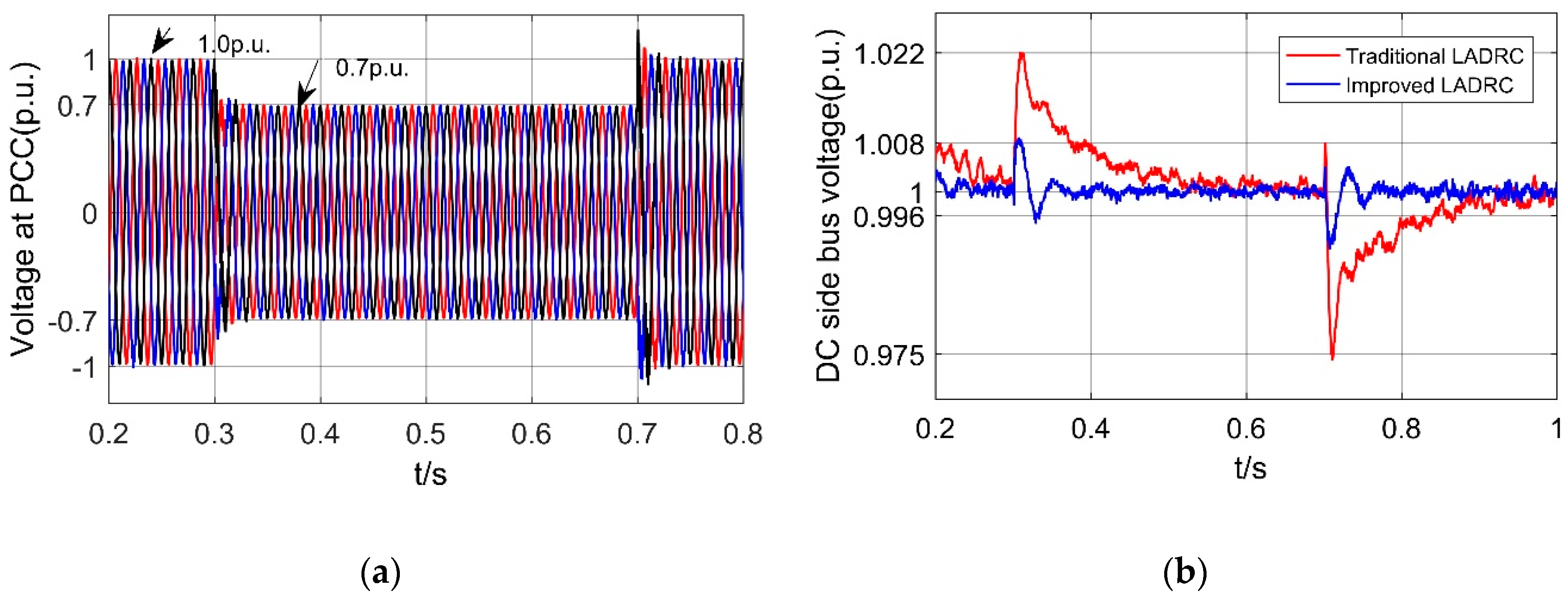
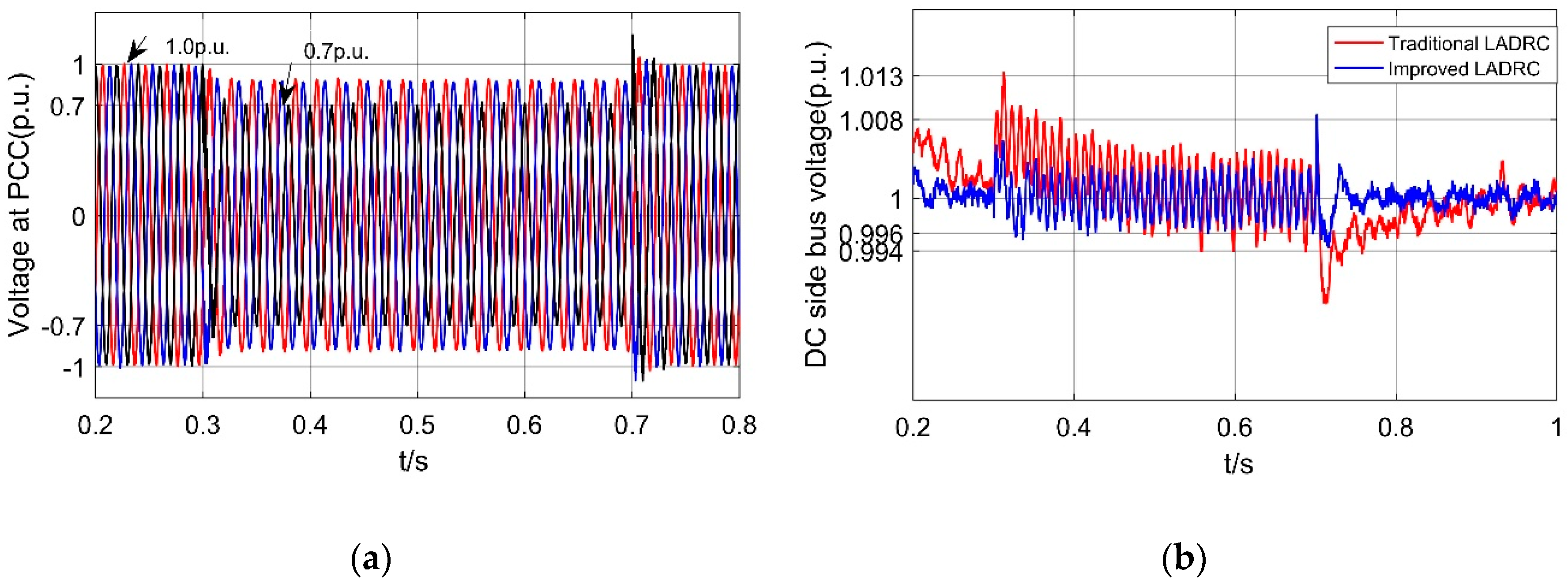
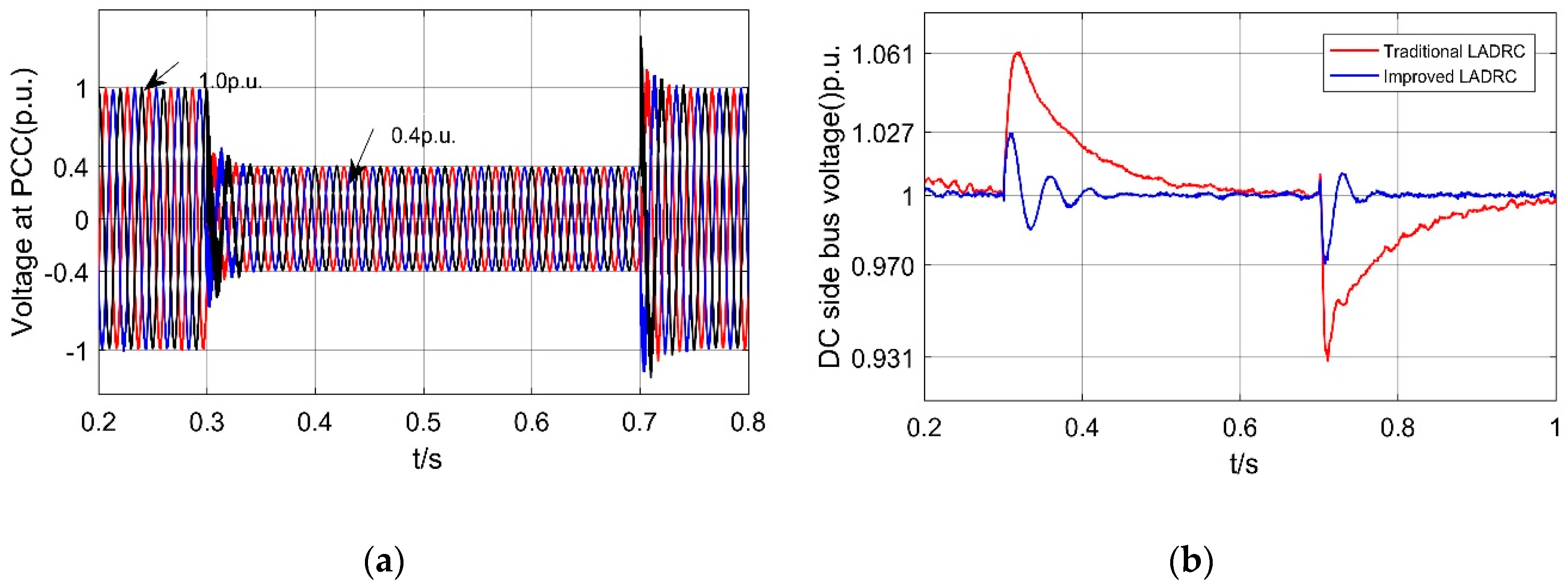
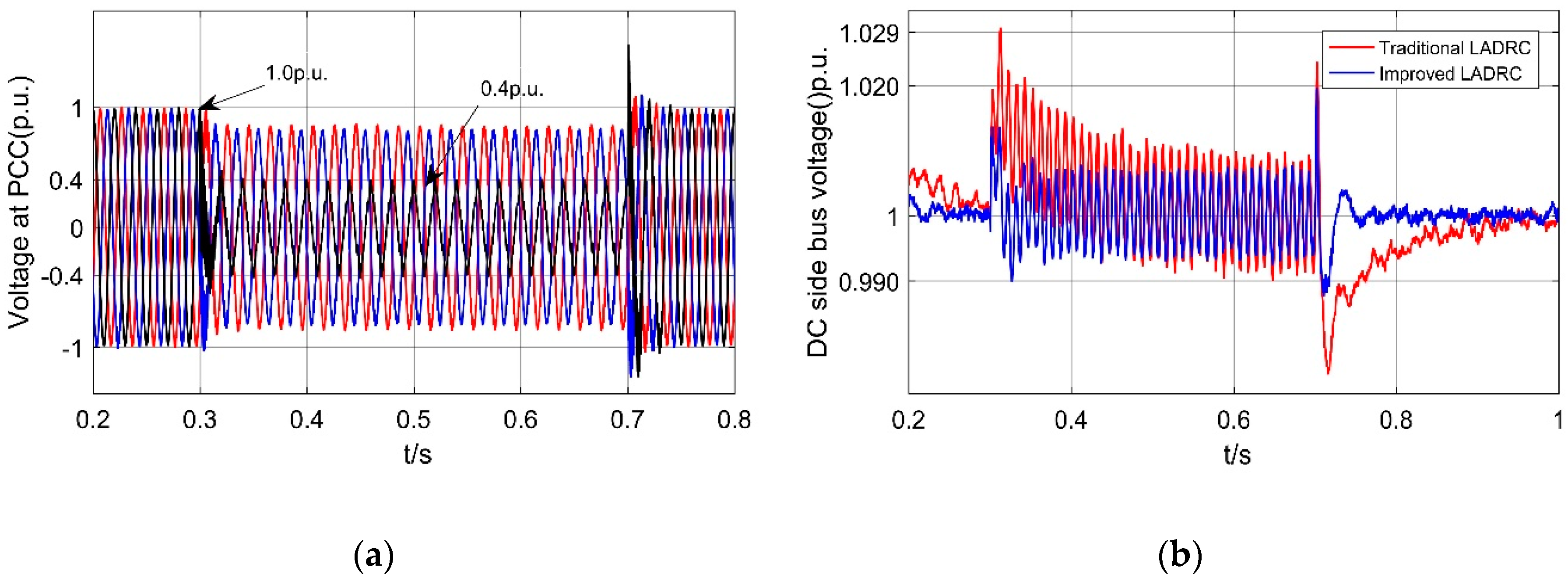
The DC-side bus voltage control of grid-connected inverter with energy storage is an important problem in the realization of stable grid-connected energy storage system. The quality of control performance directly determines the quality of grid-connected energy storage and the stability of DC-side bus voltage. In this paper, the energy storage grid-connected inverter is taken as the control object, and the DC-side bus voltage is taken as the research purpose. Aiming at the influence of low-voltage ride-through on the DC-side bus voltage, a method of improving the LADRC DC-side bus voltage based on proportional differential is proposed. The innovation of this paper is that on the basis of traditional LESO structure, the observation gain coefficient of total disturbance is improved to a proportional differential link. With the increase of frequency, the decrease of disturbance observation amplitude and phase lag are reduced effectively, the observation band width of LESO is increased, the effect of fast tracking compensation for total disturbance is achieved, at the same time, the disturbance rejection ability of the controller is improved. In this paper, the simulation analysis of symmetrical and asymmetric faults is carried out by setting 30% and 60% low-voltage ride-through at the grid-side, it is proved that the controller designed in this paper has better control performance of stabilizing DC-side bus voltage than the traditional controller.
In this paper, by improving the traditional LADRC, the control performance of the controller is obviously improved, but at the same time, the noise is amplified in the high frequency band, so that the system cannot be controlled. Therefore, the next research goal of this paper is to correct the improved LADRC link, so that the LESO is not affected by noise even in the high frequency range, so as to achieve better control effect of the controller. At the same time, we clearly realize that the biggest deficiency of this paper is the lack of physical experiments, which makes the theoretical results unable to be further verified. Therefore, in the next research, on the basis of the inadequate design of the controller in this paper, we should improve the theoretical results and carry out physical experiments, so that the theoretical results are more practical.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















