1. Introduction
With the ongoing decarbonisation of the energy sector, electric distribution grids will need to accommodate a more and more massive share of Distributed Generation (DG), mainly based on Renewable Energy Sources (RES). The high penetration of DG can pose severe challenges in terms of network management, not only because of the transition from passive to active grids, but also due to the possible occurrences of overvoltage and overloading events. DG integration can be challenging in particular for Low Voltage (LV) grids, where most of the small-scale photovoltaic (PV) systems are installed [
1] and where the generation capacity can be even several times larger than the peak load [
2,
3]. The possible solutions to increase the so-called hosting capacity of the LV grid, while preventing the technical issues associated to overvoltages and overloads, can be classified in two main categories: (i) reinforcing the grid through specific reinforcement measures; (ii) employing smart control tools to ensure the management of the DG during critical conditions [
4,
5]. Even if investing in the physical assets (e.g., replacing substation transformers or laying additional cables) is often the preferred solution of Distribution System Operators (DSOs), studies prove that adopting smart management solutions is not only more environmentally friendly and less invasive, but also economically convenient [
6,
7]. Moreover, in Europe, the European Commision recently issued the so-called Clean Energy Package, which recommends measures and incentives to foster software-based solutions [
8]. This could play a key role to encourage DSOs to invest more in digitalization and smartness rather than in physical assets.
Focusing on the problem of voltage rise mitigation through smart control, a number of different voltage control solutions has been recently proposed in the scientific literature. The proposed control strategies can be distinguished depending on their communication and architectural requirements. The simplest solutions rely on local control approaches, which depend only on the power generation or on the measurements collected at the point of common coupling of the DG [
9,
10]. The main benefit of such approaches is their simplicity, since they do not require any information exchange with other resources or components in the grid, thus avoiding the need for a dedicated Information and Communication Technology (ICT) infrastructure. At the same time, however, such solutions usually do not allow an optimal management of the DG resources and could lead to unnecessary curtailments of active power, when local energy management systems are not installed [
11]. Moreover, local solutions do not exploit the available distributed components, which could lead to a globally non-optimal solution [
12]. For this reason, alternative control strategies based on centralized or decentralized architectures have also been proposed in the literature [
13,
14,
15,
16]. Centralized architectures generally permit designing optimal DG management policies, but they also require the communication of all the field data to a control center and subsequently to send the control commands back to the DG in the grid [
17]. On the other hand, decentralized approaches can provide sub-optimal results (or converge towards the optimum only after a certain number of iterations), but they have the advantage of requiring only limited communication among the available resources, with no need for a centralized supervisor and instead with the possibility to directly implement the control logic at the DG.
In general, regardless of the control architecture, all the DG management approaches allow for the regulation of the voltage profile by acting on the reactive power injection/absorption and via the control of the generated active power (sometimes also referred to as feed-in management) [
1]. As a matter of fact, in presence of excessive generation, all the control solutions eventually lead to a curtailment of the generated active power. In this regard, a possible way to avoid the renewable energy curtailment, while keeping the grid voltage within the allowed boundaries, is to involve other flexible Distributed Energy Resources (DERs) available in the grid in a more complex management schema. In the smart grid scenario, for example, final customers could play an active role by supporting the operation of the grid through a flexible reshaping of their power demand via so-called demand side management scheme [
18]. Another option, which is more and more commonly available in combination with PV systems, is the use of Energy Storage Systems (ESSs) [
19,
20,
21]. With the availability of distributed ESSs, the exceeding power generated from the DG can be temporarily stored to avoid any voltage violations and then be re-injected into the system when the operating conditions of the grid are farther from the operational boundaries. Such a strategy clearly requires a coordinated management of DG and ESSs in order to optimize the use of the available DERs.
With reference to this scenario, this paper presents a coordinated control solution for the management of both DG and ESSs in LV distribution grids, in order to solve possible overvoltage issues. The theory behind the control algorithm is derived from Reference [
16] and it is here adapted to consider the simultaneous management of reactive power through the DG and of active power through the ESSs. The same control philosophy is then used to manage also the curtailment of DG active power, which can be needed if the other countermeasures are not sufficient to resolve the voltage violations. The algorithm allows weighting the participation of DG and ESSs in the voltage regulation process and to flexibly decide how much each DG and ESS component contributes to the mitigation of overvoltage or undervoltage events. The resulting control can be implemented in a decentralized way, hence requiring only limited communication and information exchange among the different DG and ESSs in the grid. The overall control scheme has been tested using realistic distribution grid scenarios, taking into account the highly dynamic power fluctuations that can be typically found in distribution systems. Overall, the contributions of this paper are thus: (i) combine the control of reactive power in the DG with the management of the active power in the ESSs thus extending the logic presented in Reference [
16]; (ii) to propose a decentralized algorithm that can flexibly adjust the participation of different DG and ESSs in the voltage regulation process; (iii) to test and validate the proposed algorithm in realistic conditions that are likely to occur in the distribution system.
The remainder of this paper is structured as follows.
Section 2 gives an overview of the technical aspects behind the occurrence of overvoltages due to the DG integration and of the mitigation possibilities through the regulation of the active/reactive power of DG or storage systems.
Section 3 presents the details of the coordinated control of DG and ESSs proposed for solving the voltage rise issues. The designed coordinated control has been then validated and assessed via ad hoc tests:
Section 4 describes the used simulation set-up, while
Section 5 presents and discusses the obtained results. Finally,
Section 6 gives the final remarks and concludes the paper.
3. Coordinated Voltage Control
The objective of the proposed control algorithm is to minimize the contributions of active and reactive power injection, coming from the DG and ESSs, that are needed to keep the voltage within the allowed limits. To this purpose, the active and reactive power contributions are weighted with
and
, respectively, according to the impact (shown in Equations (9) and (12)) that they bring on the voltage magnitude reduction. At the same time, the contribution of the active and reactive powers is expressed in squared terms, so that a quadratic formulation can be obtained. Overall, the voltage control logic is thus expressed as a minimization problem having the following objective function, where the terms related to active power curtailment and active power injections of the ESSs are added to the function defined in Reference [
11]:
Looking at the particular structure of the vectors
,
and
(these are
N-size vectors whose elements will be equal to zero for all the nodes where there is no ESS or DG, respectively), it is possible to find that (14) can be further modified in the following form:
where:
is the real part of the submatrix obtained when considering only the rows and columns of Z associated to the nodes h where the ESSs are connected.
is the real part of the submatrix obtained when considering only the rows and columns of Z associated to the nodes h where DGs are connected.
is the imaginary part of the submatrix obtained when considering only the rows and columns of Z associated to the nodes h where DGs are connected.
, and are the subvectors of , and associated to the only nodes where ESSs and DG are present, respectively.
From (15), the optimization problem as a function of
,
and
is expressed as:
Given that the ESSs and the DG do not have any explicit interaction, the solution of the minimization problem can be decoupled into three separate problems, thus resulting into:
minimization
minimization
minimization
where
represents the voltage at node
or
.
In the proposed formulation, the full optimization problem in (16) is split into three smaller sub-problems given by (17)–(19). In each one of the sub-problems, only the active or the reactive power appears; moreover, each sub-problem only concerns a particular type of resource (ESS or DG) and this allows reducing the complexity of the overall minimization process. At the same time, since all the three sub-problems share the same constraint on the allowed voltage boundaries, the obtained control actions indirectly cooperate to resolve the possible voltage rise issues.
Compared to other formulations based on dual decomposition methods [
11,
17,
25], the proposed solution includes the regulation of both the active and reactive power in the grid for the optimization of the voltage profile. This is done taking into account that, in the distribution system, both the active and reactive power at the nodes have an impact on the resulting grid voltage, due to the similar order of magnitude of resistances and reactances of the lines.
3.1. Energy Storage Active Power Control
The process to obtain the feedback control output for the ESSs is based on the well-known duality theory [
26] and takes inspiration from the optimization method presented in Reference [
16] for the control of the DG reactive power.
The Lagrangian of the problem (17) can be written as:
where
are the vectors of Lagrangian multipliers associated to the voltage and power constraints, respectively, and
is the set of nodes where an ESS is available.
From the theory of duality, the algorithm is based on the iterative execution of the following steps:
- (1)
dual-ascent steps on the dual variables ;
- (2)
dual-ascent steps on the dual variables ;
- (3)
unconstrained minimization on the primal variable .
Defining with
k the iteration of the algorithm, the dual ascent-step 1) is defined as:
where
is a positive constant and the notation
indicates the projection on the positive orthant.
The calculation of
is based on Proof of preposition 3 and 4 of Reference [
27], resulting in:
where
is the spectral radius,
is defined as
and
.
For each iteration
k, the steps 2) and 3) of the algorithm are calculated with a number of internal iterations
K that allows the convergence of 2) and 3) towards the solution of the optimization problem [
11].
where
is a positive constant.
Following the findings in Reference [
11], the upper bound for
to reach a feasible solution is defined as:
where
is the spectral radius. To comply with (24), in the implemented algorithm, the value of
has been chosen to be
.
The minimization of step 3) with respect to the primal variable is defined as:
Since the Lagrangian multipliers are updated via the previously described dual-ascent procedure, in (25), only
is considered as an active variable; the unconstrained minimization can be thus expressed as
, which results in:
From (10), it is possible to find that
. Therefore, from (26), the updated active power charging for the ESSs (at the iteration
k,K+1) becomes:
Through this process, eventually, the active power associated to the charging of the ESS is projected into its feasible set. By applying the dual ascent method, the optimization problem defined in (17) has thus turned into an algebraic iterative algorithm that can be easily implemented in any programmable language.
As described in Reference [
27], it is worth noting that the updates of the Lagrangian multipliers and the calculation of the control output can be performed in a distributed way, given that the resulting
matrix has a particular sparse structure that, for each considered node
h, brings dependencies only from its neighbouring ESS nodes. The formulation, however, also highlights a possible drawback associated to the multiplication
, since the updated values of the multipliers should be exchanged at each iteration
K with the neighbors. This can represent a significant burden for the communication, especially when the number
K is high. To overcome this problem, the algorithm has been modified to get updated multipliers from the neighbours only at each iteration
k, keeping them constant throughout the internal iterations of steps (2) and (3). In this way, the number of times that the multipliers are exchanged can be considerably reduced.
3.2. DG Active Power Control
The control for the curtailment of the active power generated by the DG follows exactly the same procedure described in
Section 3.1, but obviously it is applied to the minimization problem (18). As a consequence, the calculation of
and
are based in this case on the matrix
, while the Lagrangian multipliers are defined as in
Section 3.1 but they refer to a different subset (
) of nodes of the grid. Finally, the positive constants for the dual-ascent algorithm are
and
.
3.3. DG Reactive Power Control
The calculation of the reactive power feedback control for the DG follows the same approach as in
Section 3.1 and to what was presented in Reference [
11], which can be summarized as follows. The Lagrangian of the problem (19) can be written as:
where
are the vectors of Lagrangian multipliers associated to the voltage and power constraints, respectively, and
is the set of nodes with a connected generation source.
Similarly to what was presented in
Section 3.1, the optimization relies on the iterative execution of two dual-ascent steps and an unconstrained minimization of the primal variable. The first dual-ascent step involves the update of the Lagrangian multipliers associated to the voltage constraints, according to the following:
where
is a positive constant that has to comply with:
where
is the spectral radius,
is defined as
and
.
The update of the Lagrangian multipliers
and
during the second dual ascent step is performed with internal iterations
K as described in
Section 3.1:
where
is a positive constant. Based on the considerations in Reference [
11], the upper bound for
to reach a feasible solution is defined as:
where
is the spectral radius. To comply with (32), the value of
has been thus chosen to be
.
By applying the same approach as in
Section 3.1 for the unconstrained minimization of the primal variable, the updated reactive power injections
of the DG (at the iteration
k+1) result as:
Equation (33) gives a simple algebraic relationship through which it is possible to calculate the updated values of reactive power absorption to be considered for the DG. Similarly to what has been described in
Section 3.1, the matrix
has a particular sparse structure that, for each node
h, brings dependencies only from the neighbouring DG nodes, thus allowing for a distributed implementation of the algorithm. Moreover, to reduce the communication burden of the algorithm, the Lagrangian multipliers can be communicated only at the
k-th iteration, thus keeping the same values for the multipliers of the neighbouring nodes during the internal
K iterations of the second and third step of the procedure.
3.4. DG and ESS Coordination
As seen in the previous subsections, one of the strengths of the described control algorithm is that the sparse structure of the matrices appearing in the minimization of the primal variable (for all the three sub-problems) leads to dependencies, for each node
h, only from the neighbouring nodes, thus allowing for a distributed implementation of the control logic. The described control also allows a simple insertion or removal of actors participating in the control (by acting on the matrices
,
or
) and, being a feedback control based on simple algebraic relationships, it requires minimal computational effort [
11].
In the proposed approach, a key role for the coordination of the actions performed by the DG and the ESSs is played by the parameters used for the first step of the dual ascent. The parameters and are defined as vectors where each element, which is is associated to an ESS or DG in the grid, can be dynamically modified. Based on the values of these parameters, the role played by each resource in supporting the voltage rise mitigation can be flexibly changed. The variation of and modifies the influence that has on the update of the Lagrangian multipliers. In fact, assigning different values of to the generic node h results in a different update of the Lagrangian multipliers and , which in turn modifies the impact of the overvoltage on the calculation of the active/reactive power set-points.
This feature can be used to prioritize the ESSs charging over the DG reactive power injection in case of overvoltage conditions, or vice versa. For example, the elements of the vector
corresponding to the DG nodes can be set to
as long as the multiplier of the associated battery
is equal to zero, meaning that the maximum value of the charging power has not been reached by the ESS yet. With the above logic, the reactive power support is activated only when the ESS charging is not sufficient to limit the overvoltage. The same approach can be applied to the DG active power control described in
Section 3.2. In this case, the elements of the vector
can be kept equal to zero till when the reactive power absorption or the charging power of that node and of the neighbours have not reached the maximum, meaning that the associated multipliers are still equal to zero.
An additional logic can be used to remove one or more ESSs from the list of resources available for the control of the grid by defining . Such a logic can be useful, for example, when a battery is fully charged (or it is charged beyond a certain threshold value) and it is preferable not to exploit it any longer for the voltage mitigation purposes.
3.5. Addition of Virtual Nodes
As described in
Section 3.1 and
Section 3.3, the distributed control algorithm is based on the communication of Lagrangian multipliers between the neighbouring ESS or DG nodes, which comes from the sparsity of the matrices
and
(or
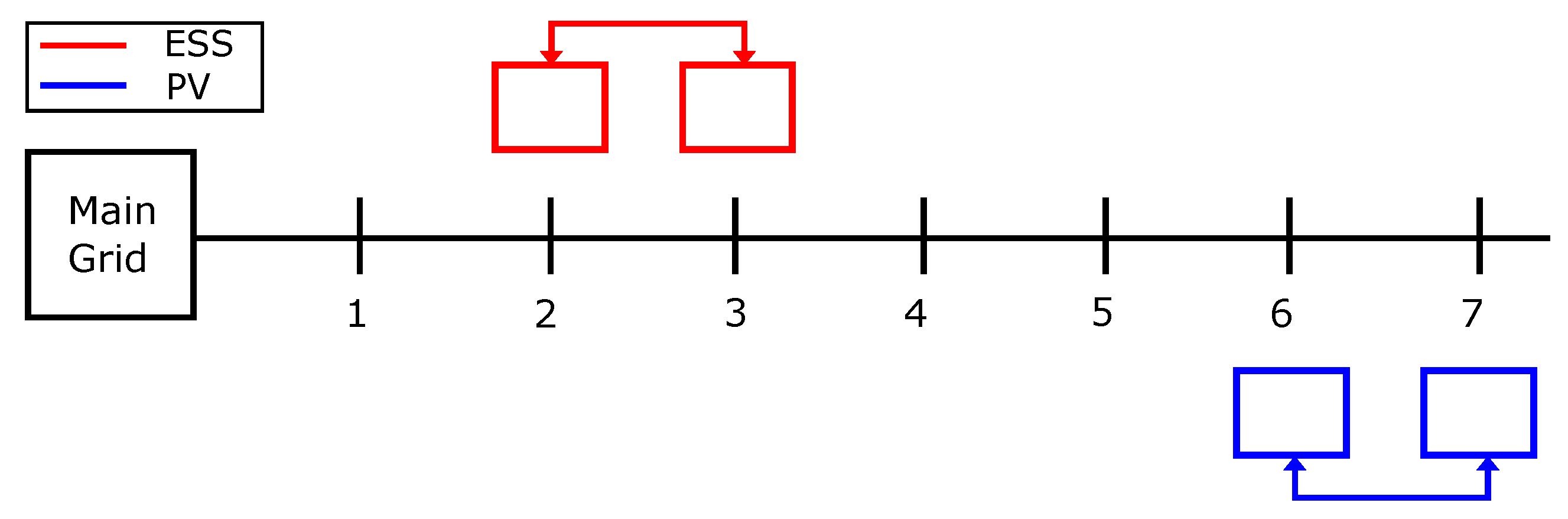
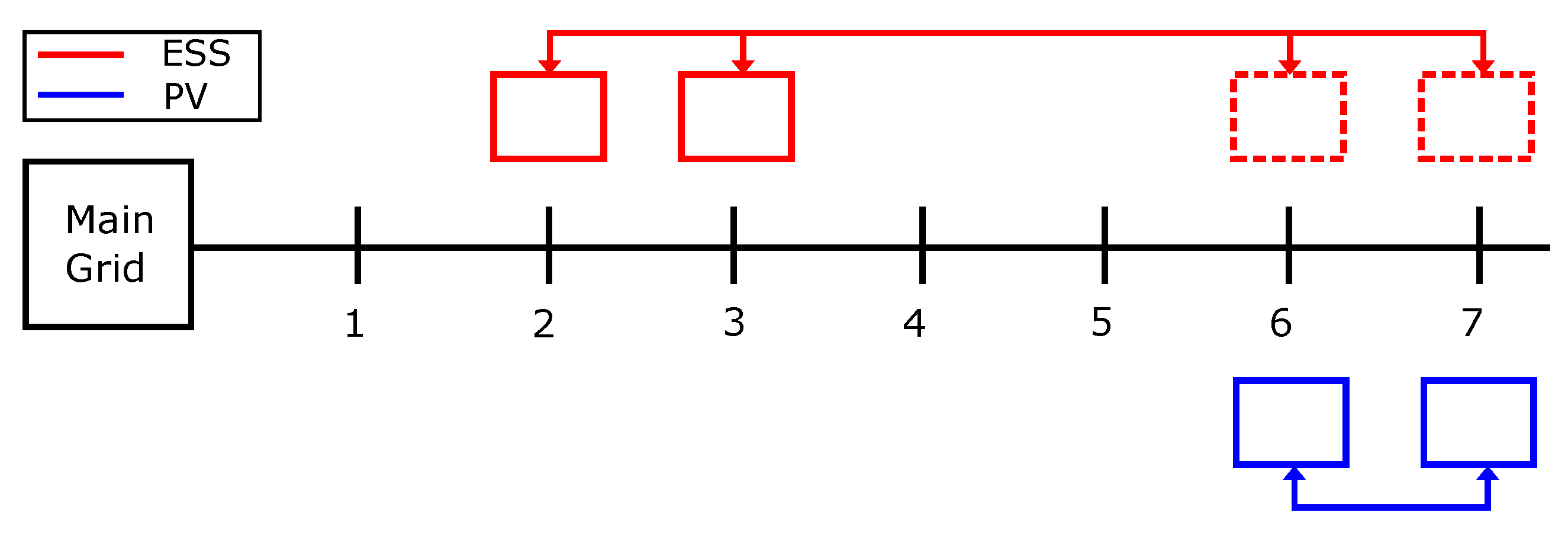
), respectively. Moreover, the control of ESSs and DG is decoupled, which allows reducing the complexity of the control strategy. While this has clear benefits from a computational burden perspective, it can also lead to an ineffective control in specific scenarios. In particular, this can happen when the controllable resources are located only in nodes where the overvoltages do not appear (typically at the beginning of the feeder), thus leading to a situation where no issue is detected and consequently the resources are not activated to contribute to the overvoltage mitigation. This type of scenario is described through a simple example in
Figure 2. In the example, ESSs are assumed to be installed only at nodes 2 and 3, while DG is present at buses 6 and 7. According to the logic described in the previous subsections, both ESSs and DG act independently and communicate only with the neighbouring nodes equipped with the same type of resource. As a result, with this configuration, if an overvoltage occurs at the end of the feeder, the ESSs will not be able to detect the problem and to react for resolving the overvoltage.
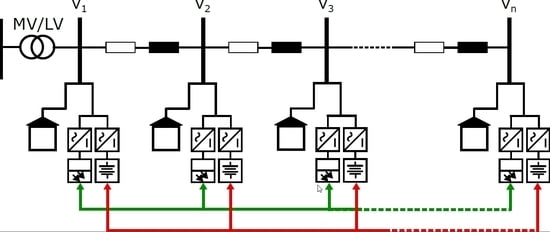
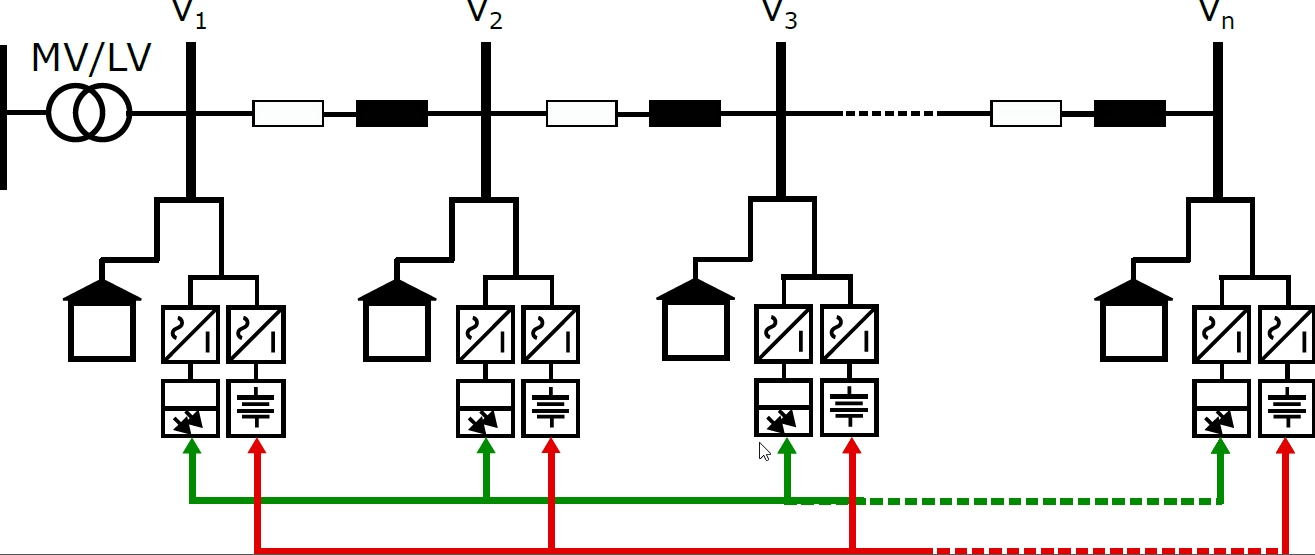
To overcome this issue, in the designed algorithm, the concept of virtual nodes is introduced, which refers to the addition of control nodes that do not actively contribute to the voltage regulation but that participate in the overall control strategy by sharing their multipliers with the rest of the resources (the ESSs in the example at hand). The idea is to add virtual nodes in all the nodes where the DG is present but no ESSs are installed (as shown in
Figure 3), since these are the nodes where the maximum overvoltages can be found. These virtual nodes can be seen as additional controllers that have limits on their minimum and maximum power set to zero (namely,
). These virtual nodes do not apply any control output but they exchange Lagrangian multipliers with the other controllers associated to existing ESSs, allowing in this way to involve the ESSs in the control process when an overvoltage is present in the grid.
5. Simulation Results
The optimization algorithm presented in
Section 3 has been implemented in Python and it has been tested in loop with a power flow simulation of the grid [
29]. Simulations have been performed to validate the proposed coordinated control of ESSs and DG in different scenarios and to compare this control strategy with a solution where only DG is involved. The code used for the simulations is available online and freely downloadable [
30].
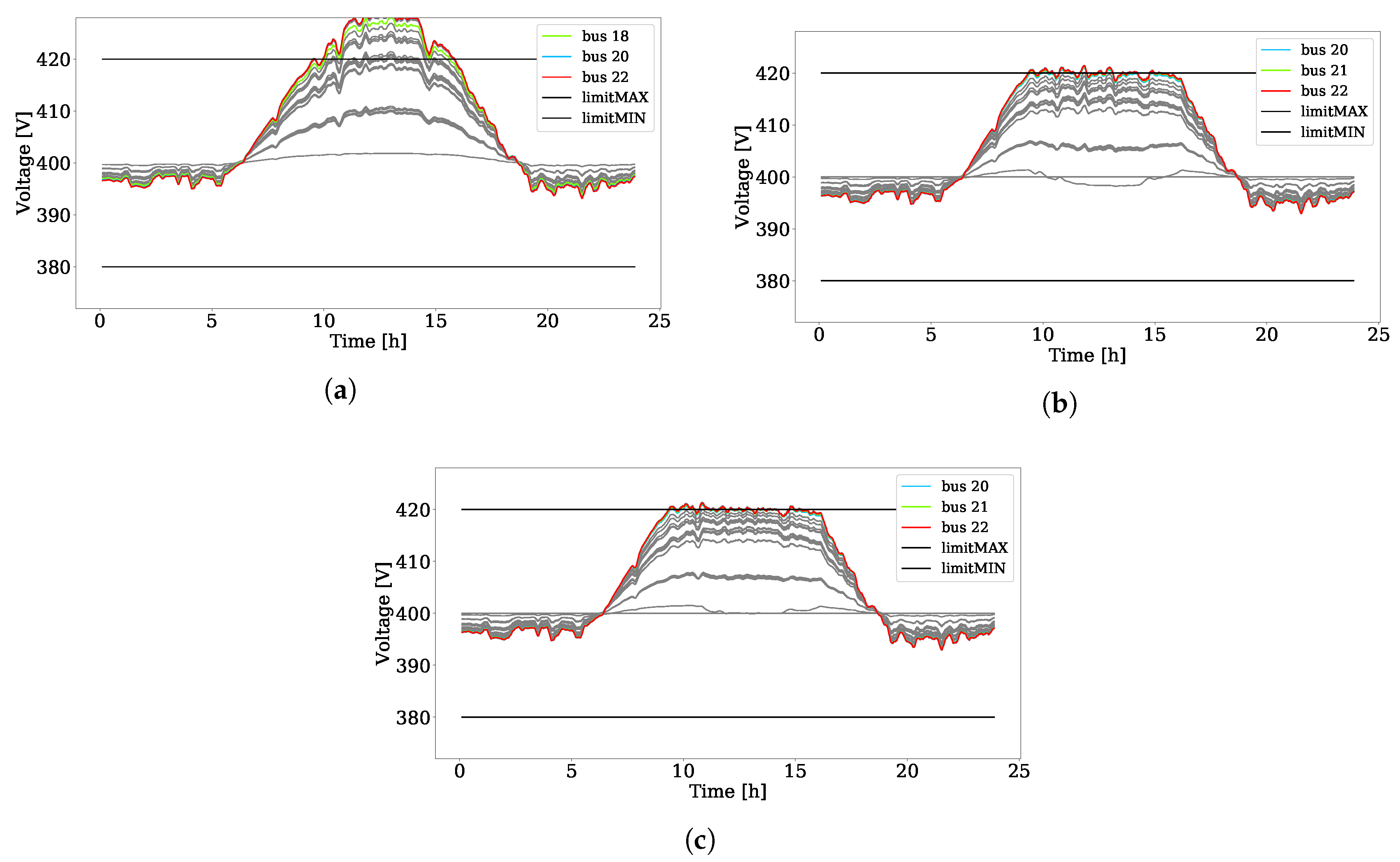
A first test has been performed considering a worst case scenario with high PV generation obtained in presence of clear sky conditions.
Figure 7a shows the effect of the high penetration of the renewable generation in a totally uncontrolled scenario, which leads to an overvoltage condition for a considerable number of grid nodes (in grey color the grid nodes not in the legend) and for a significant interval of time during the central part of the day. On the contrary,
Figure 7b,c (which refer to the case of control performed only with DG or involving both DG and ESSs, respectively) clearly highlight the beneficial effect brought by the implementation of the designed voltage control: in fact, in both the scenarios the voltage profiles remain within the allowed limits.
While the effects of the control applied only to the DG or to both DG and ESSs are similar in terms of obtained voltage profile, some important differences can be observed when looking at the resulting power profiles of the PV.
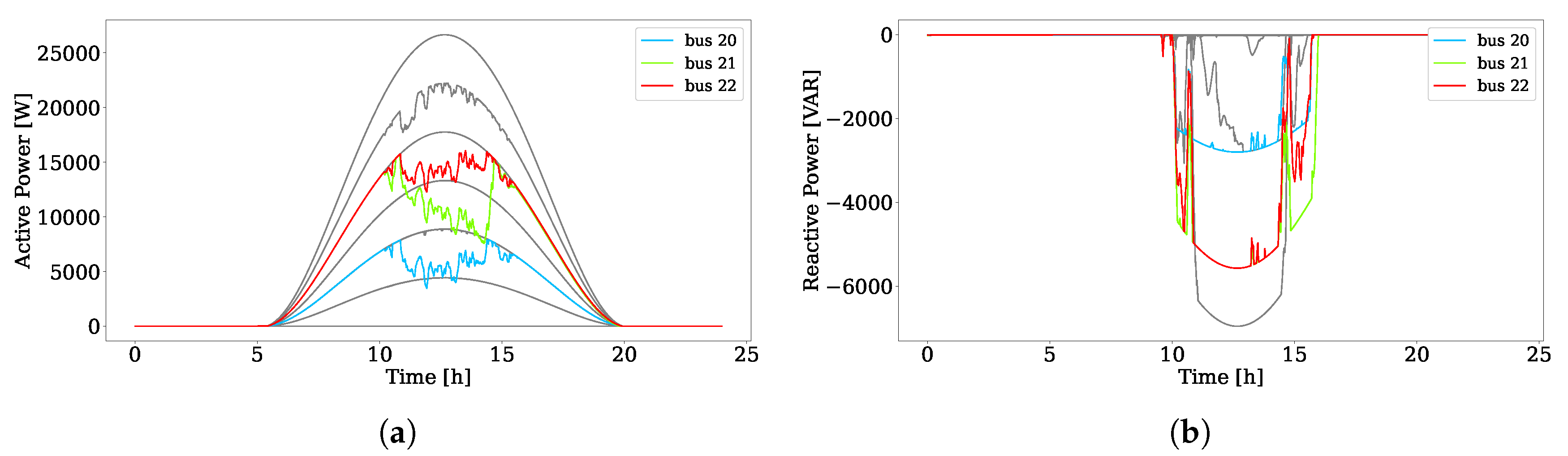
Figure 8 shows the active power injected and the reactive power absorbed by the PVs in the case where only the DG is considered for the voltage control. These figures highlight that in the considered scenario, the PV active power control is activated in some nodes because the reactive power absorption has reached its limit, meaning that the corresponding Lagrangian multipliers became different from zero and therefore the logic managing the PV active power control reacted to modify the values of the parameter
in order to enable the active power curtailment. As visible in
Figure 8a, the active power injected by the PVs is consequently reduced in some of the nodes (e.g., nodes 20, 21 and 22) during the central hours of the day, since the reactive power absorption was not sufficient in that moment of the day to compensate for the overvoltage. Obviously, this automatically translates into the waste of potentially available clean energy as well as in additional system costs if the DSO is called to pay for compensating the customers affected by the loss of generated power.
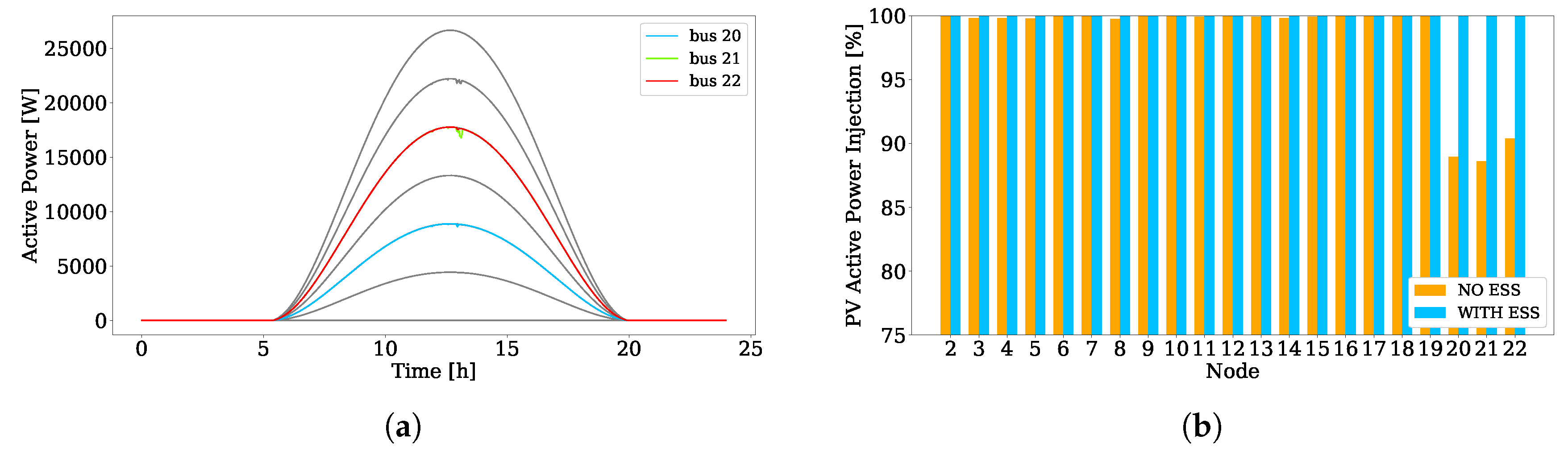
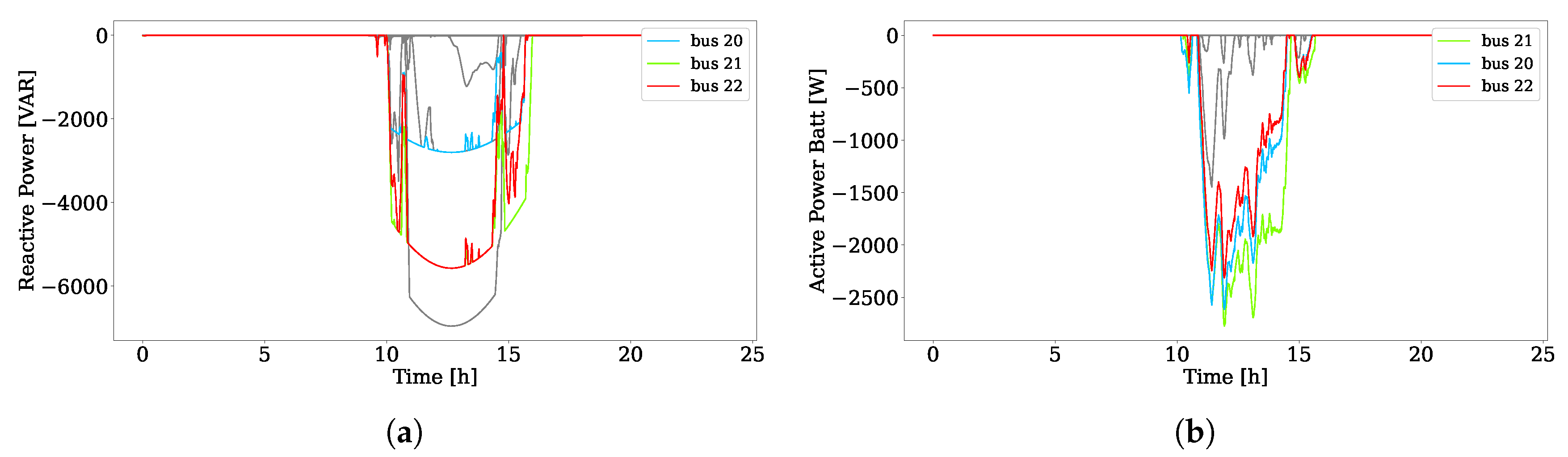
Figure 9 describes instead the case where the control of the ESSs is also additionally applied. As discussed in
Section 3.4, an important feature of the proposed coordinated voltage control algorithm is the possibility to flexibly decide the contribution of the different resources to the voltage rise mitigation. In particular, this can be done by tuning the parameters
used within the control algorithm. While this paper does not aim at establishing optimal rules for the definition of the values of these parameters, tests have been performed to assess the possible impact of a different selection of such setting. In this regard,
Figure 10 shows the results deriving from the application of the logic presented in
Section 3.4, where the charging of active power in the ESSs is prioritized with respect to the absorption of reactive power from the DG. As a result of this prioritization logic, it is possible to observe that the values of active power values provided to the ESSs reach the available limits for some of the nodes, meaning that the associated ESSs charge at their maximum power. In this case, it is possible to observe that the number of PVs reaching the limit of reactive power consumption is smaller, and this consequently reduces also the amount of curtailed active power (as visible from the comparison between
Figure 8a and
Figure 9a). The corresponding active power absorbed by the ESSs (operation in charging mode) is given in
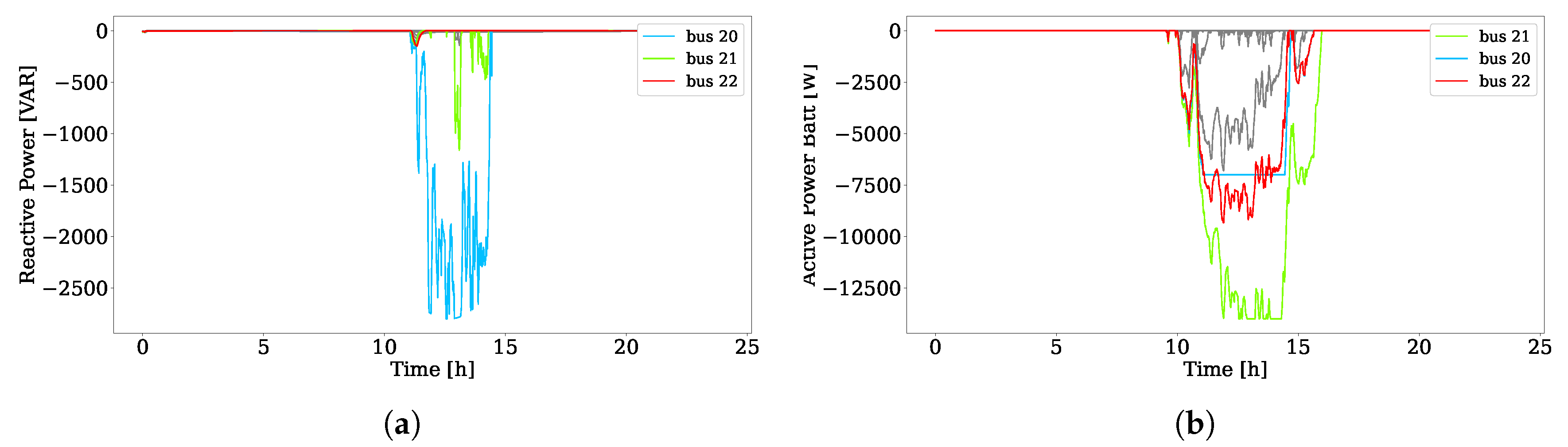
Figure 10b. It shows that, like for the reactive power control, the control algorithm provides control set-points to absorb active power as soon as the node voltages reach the upper limit. As described in
Section 3.4, DGs reactive power control could also be prioritized with respect to the active power control of the ESSs. The result of this prioritization strategy is described in
Figure 11, where it is clear that the amount of reactive power increased and the active power of the ESSs decreased compared to the above scenario. Since the active power curtailment is activated only when reactive power of PVs and active power of ESSs of a set of neighbors reach the limit, a change in the prioritization scheme does not modify the curtailment of the active power.
The results of the three different simulation tests are summarized in
Table 2, where reactive power injections and active power injections for each customers are averaged over the number of data points collected. The Table demonstrates the positive impact of the coordinated control on reducing the active power curtailment in both ESS and PV prioritization.
As described in
Section 2.3, a goal of this work is to assess the impact of coordinating the ESSs charging and the DG reactive power provision for mitigating the overvoltage events occurring in the distribution grid. Therefore, the active power charging behaviour of the batteries does not follow any customer-based profile and it is set to zero when no overvoltages are present. This approach, although not combined with independent charging/discharging profiles, helps understanding the sole contribution of the ESSs to limit the voltage rise. The advantage of integrating the ESSs in the voltage control strategy is shown in
Figure 10b, where the curtailment of active power injected by the PVs is presented for the two cases of control with and without the ESSs. More specifically,
Figure 10b provides the percentage of PV energy provided by each node over the day in the two control options previously described. The comparison of the results, while strictly related to the specific scenario under test, clearly demonstrates the potential advantage achievable, when using the ESSs, in terms of reduction of the active power curtailment. This is emphasized especially for the nodes at the end of the feeders of the grid, where the effects of the voltage rise are more evident.
Additional tests have been conducted considering the PV profiles described in
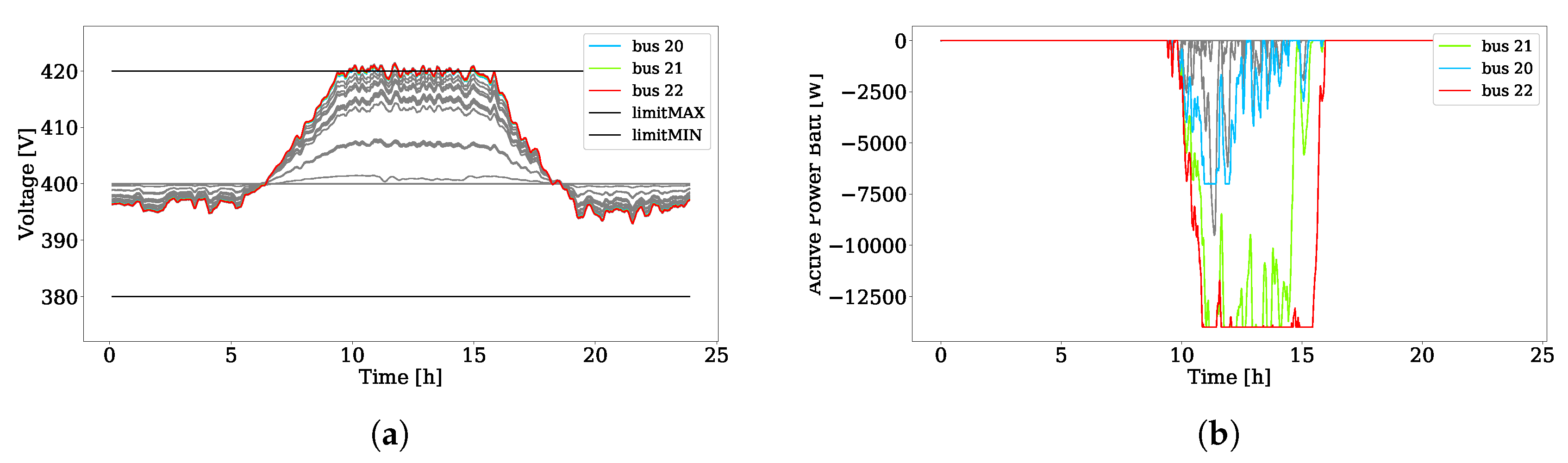
Section 4.3 emulating a day with cloudy conditions. While this case is not the worst one in terms of resulting overvoltage, it is important to assess the behaviour of the optimization algorithm in this scenario, since the highly dynamic and fluctuating conditions of the voltage and power profiles could affect the expected operation of the control.
Figure 12a highlights that, also in this scenario, the capabilities of the coordinated control to maintain the voltage within the allowed boundaries are not affected by the stochastic behaviour of the DG. At the same time, however,
Figure 12b also shows that the desired voltage output is achieved at the expenses of a very highly fluctuating profile of the ESS charging. This could highlight the need to take adequate countermeasures in the control strategy in the case in which constraints exist for the maximum variations that can be applied to the charging/discharging power profile of the ESS.
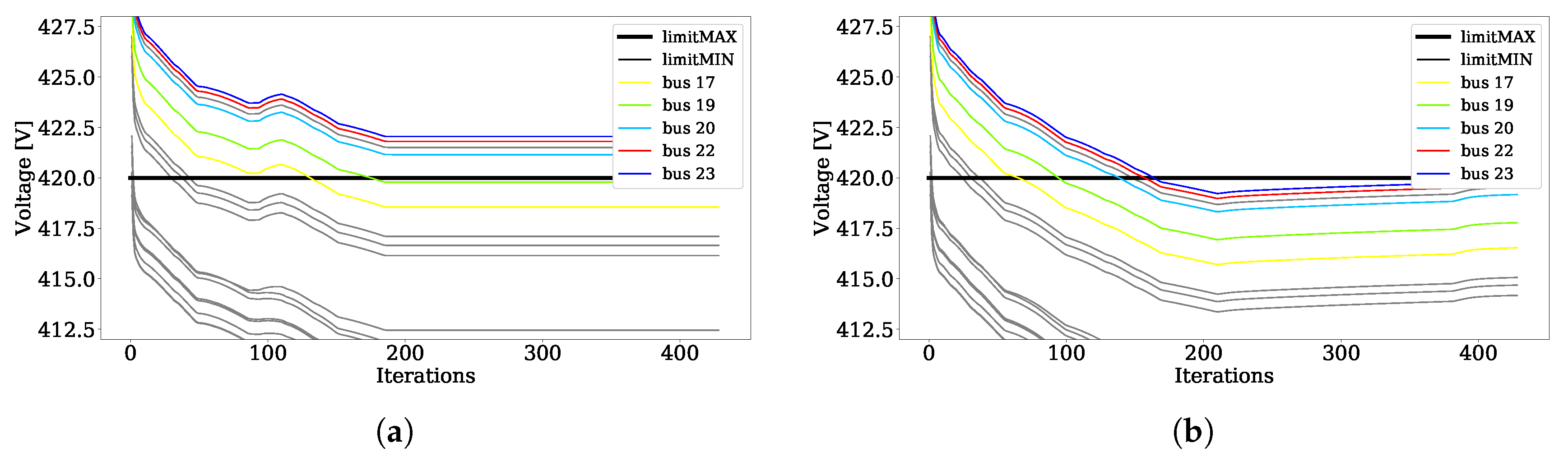
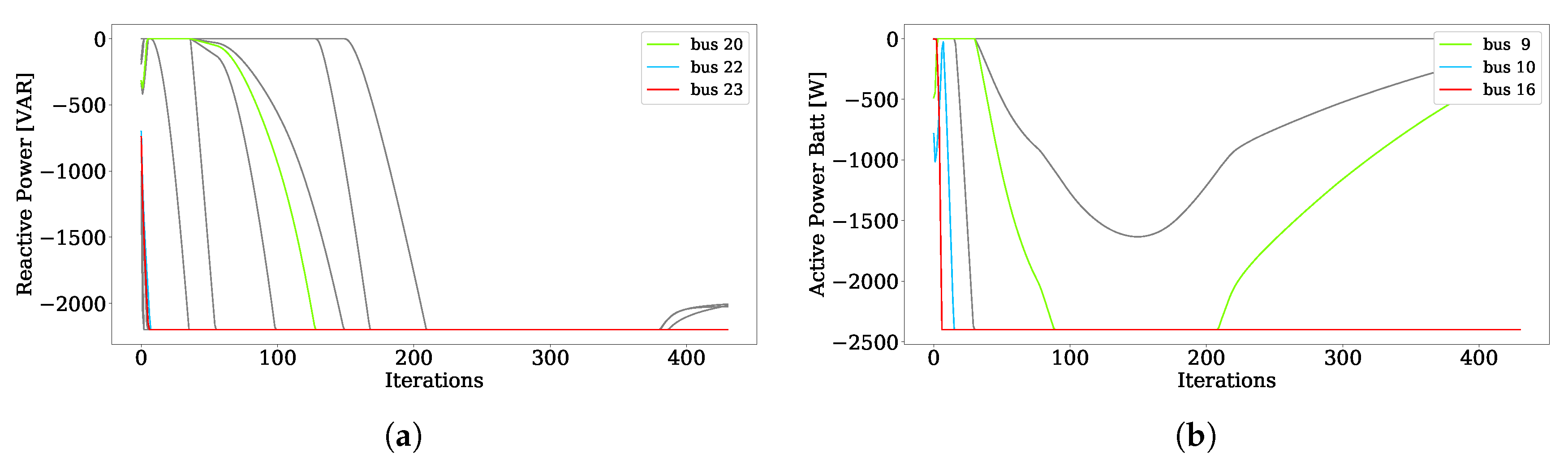
Another set of simulations has been performed to prove the key role played by the introduction of the virtual nodes for the effective coordination of the DG and ESS control. The test here presented consists of a scenario where each load has a constant active power consumption of
and the installed PVs have active power generation of
. The PV generators are placed in nodes
whereas the ESSs have been arbitrarily placed in
, to emulate a generic scenario where PVs and ESSs are not placed in the same locations. In this configuration, overvoltages arise at the last nodes of the grid and consequently the reactive power control activates to decrease the voltage levels. If virtual nodes are not used, since the voltage values from node 1 to 19 are below the limit, the active power control of the ESSs is not activated. As shown in
Figure 13a, this can lead to cases where the overvoltage is not solved if the DG active power curtailment is not activated (in this set of simulations the DG active power control has been disabled to allow an easier comparison of the results for the cases with or without virtual nodes). On the other hand, the same overvoltage situation can be solved, without using any renewable generation curtailment, exploiting instead the available ESSs resources, if virtual nodes are introduced. To this purpose, virtual nodes have been added to nodes
, namely in those nodes where PVs without ESSs are installed. As visible in
Figure 13b, with this set-up, the proposed control algorithm is able to handle the overvoltage and to bring the voltage magnitude within the allowed thresholds for all the nodes of the grid. As explained in
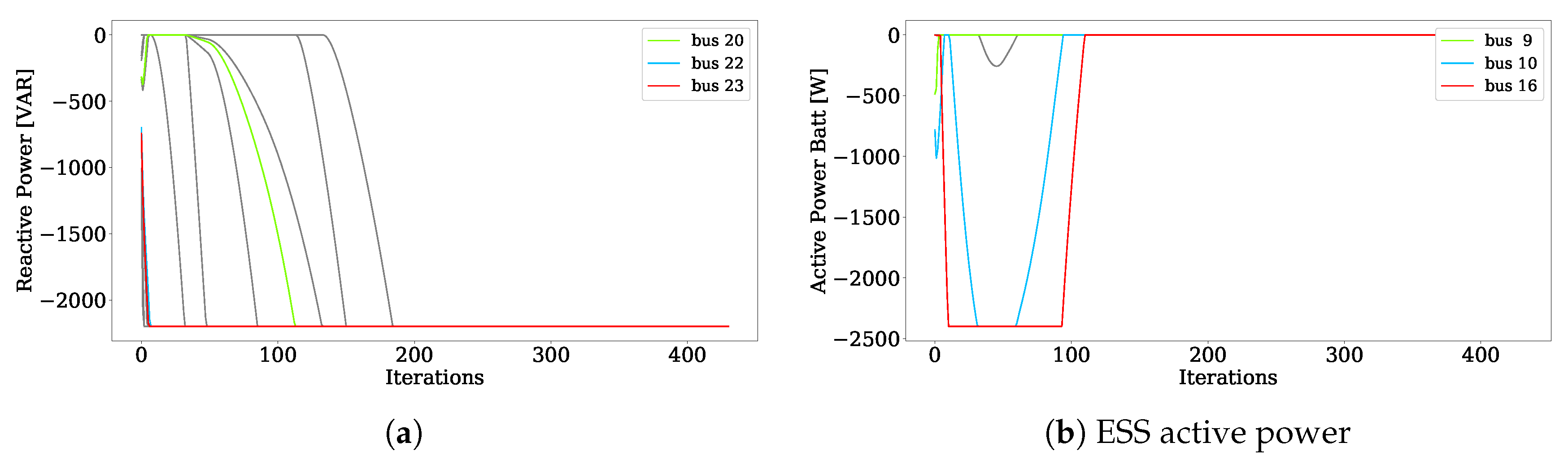
Section 3.5, the virtual nodes do not actively contribute to the reduction of the voltage values but they make the ESSs aware of the overvoltage by sharing their Lagrangian multipliers. This allows activating the absorption of active power by the ESSs also in the nodes where the overvoltage is not present (see the comparison between the power profiles in
Figure 14 and
Figure 15), leading to a proper reduction of the voltage also in the last nodes of the grid.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}