
Research on the Evolution and Damage Mechanism of Normal Fault Based on Physical Simulation Experiments and Particle Image Velocimetry Technique



Abstract
:1. Introduction
2. Experimental Section
2.1. Materials
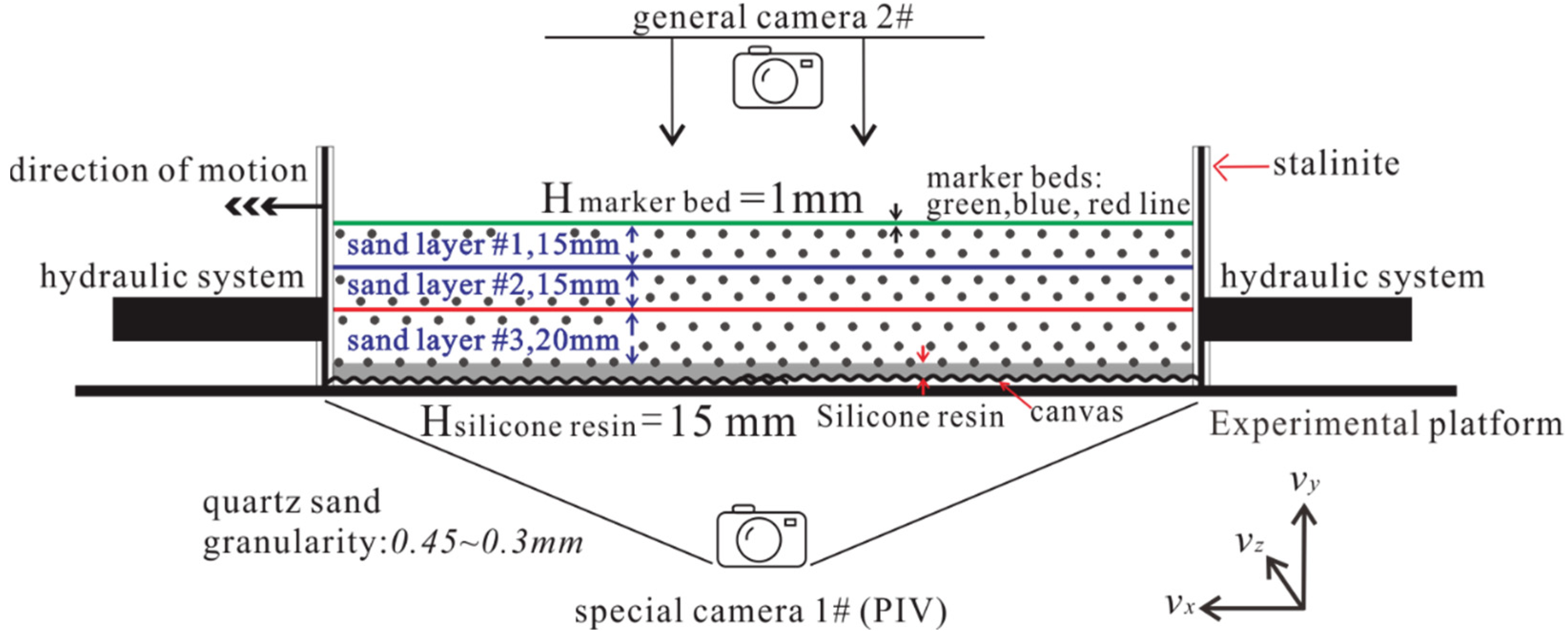
2.2. Experimental Setup
2.3. Experiment Procedure
2.4. Data Analysis
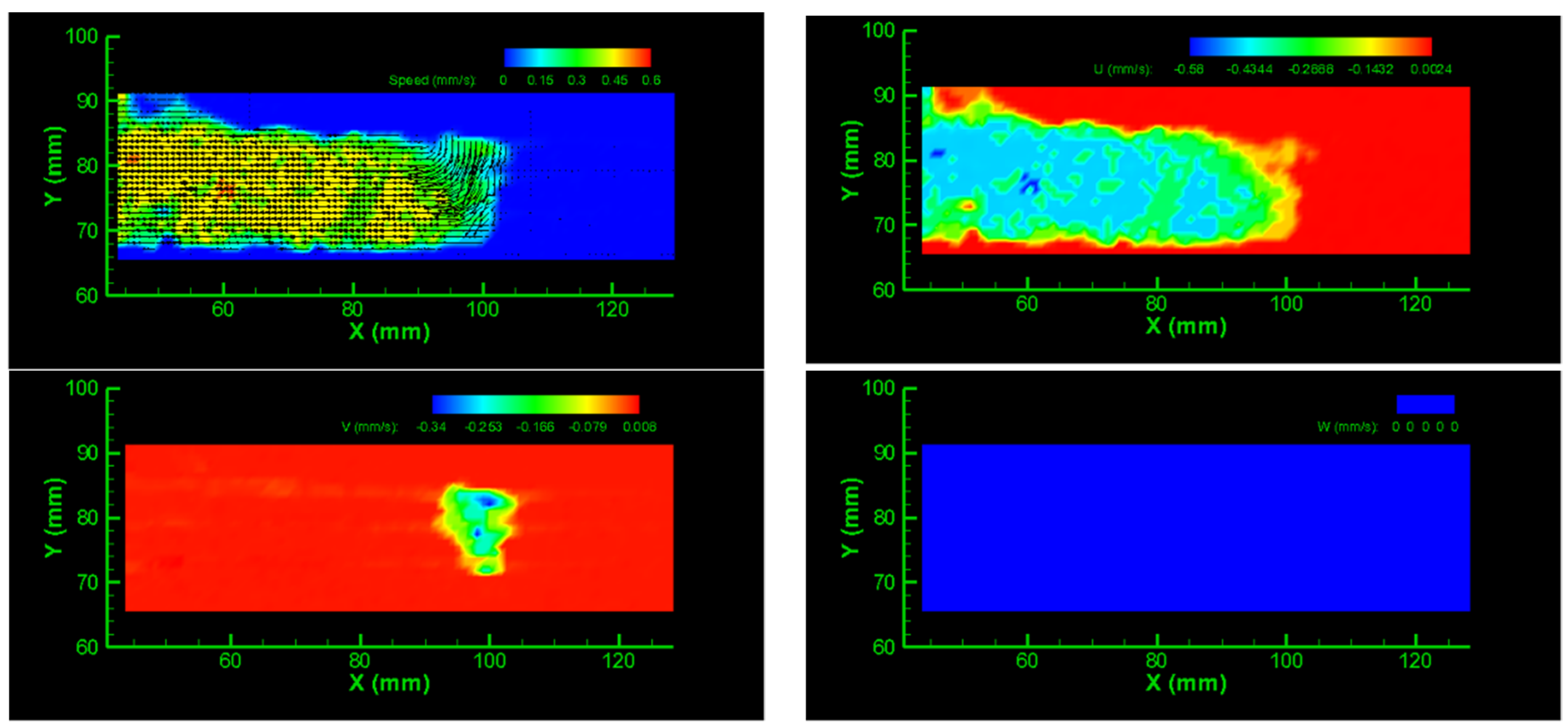
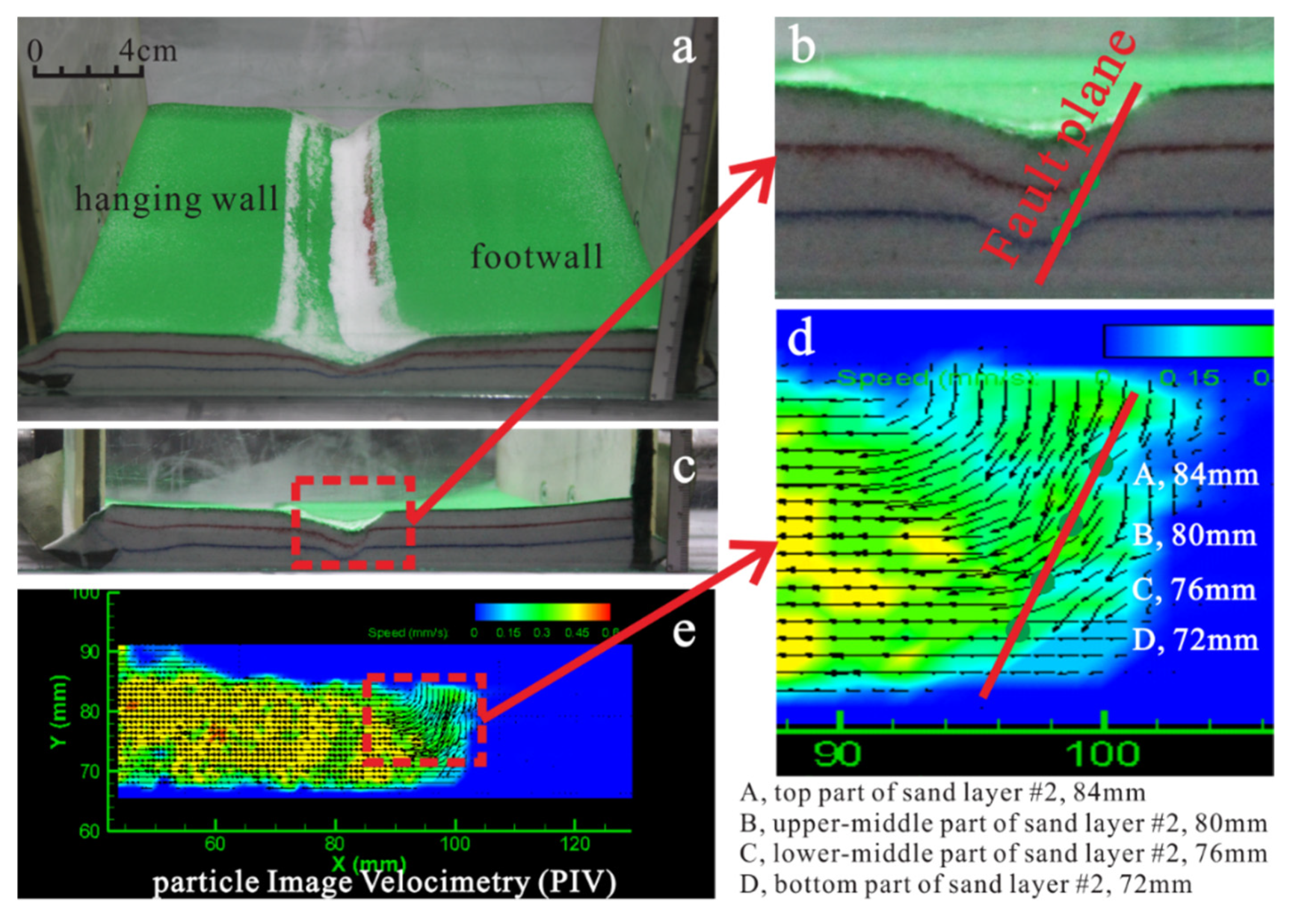
2.4.1. Data Collection by PIV Technique
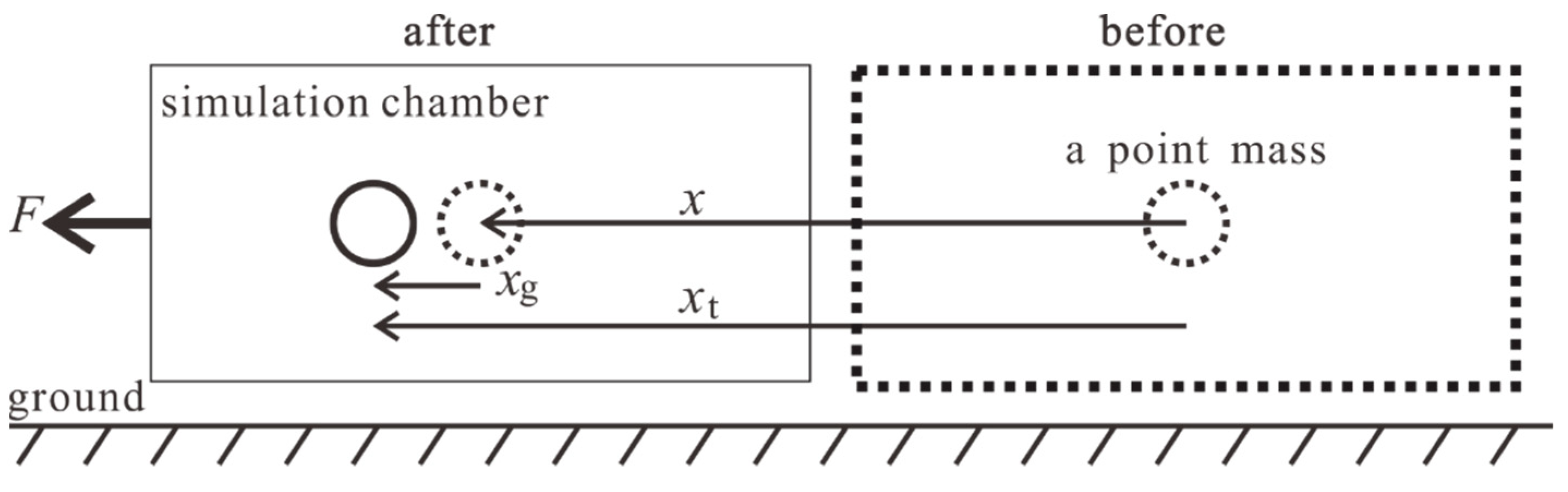
2.4.2. Dip Angle and Fault Displacement
2.4.3. Strain Energy and Strain Energy Density
3. Results and Discussion
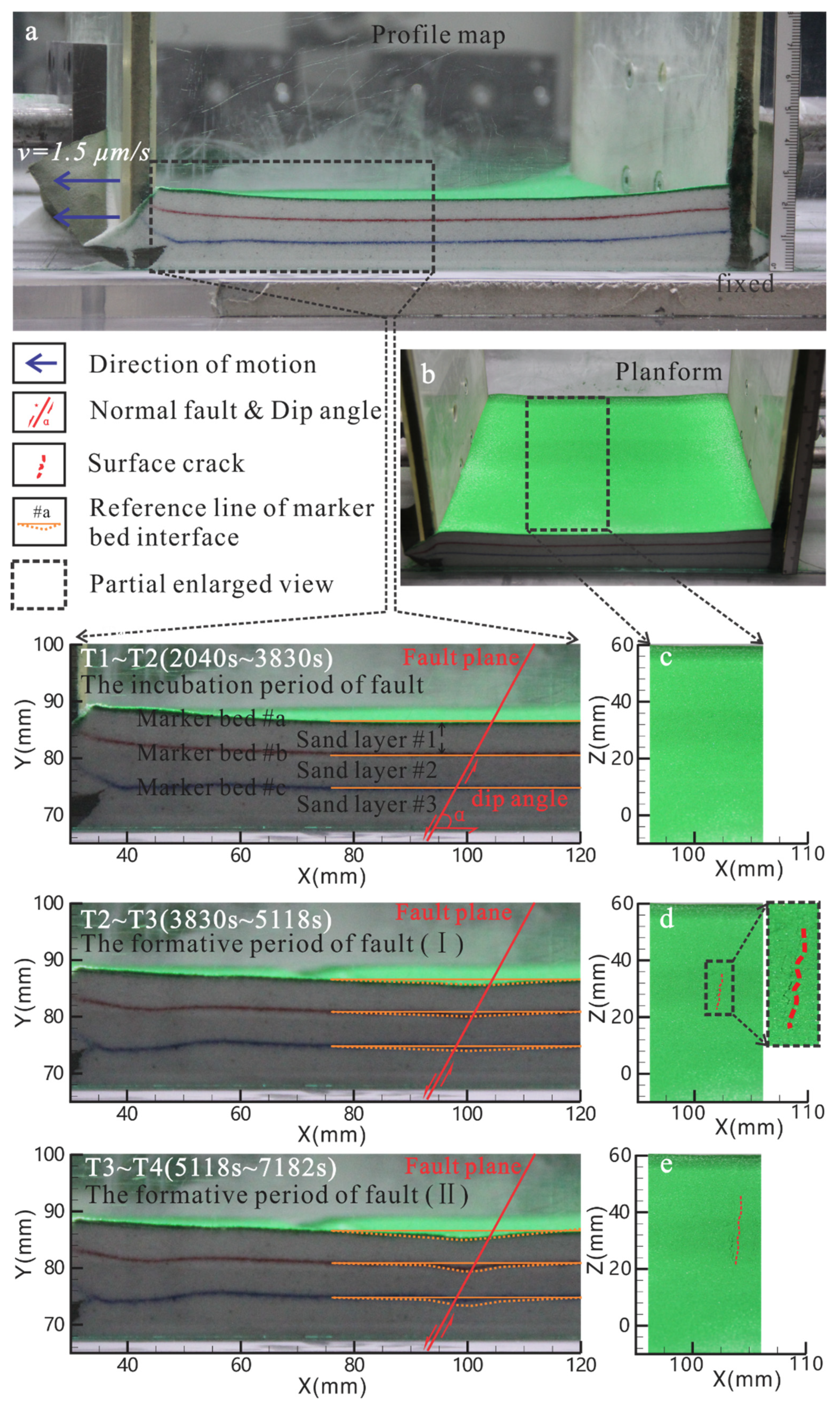
3.1. Identifying the Formation and Evolution of Normal Fault
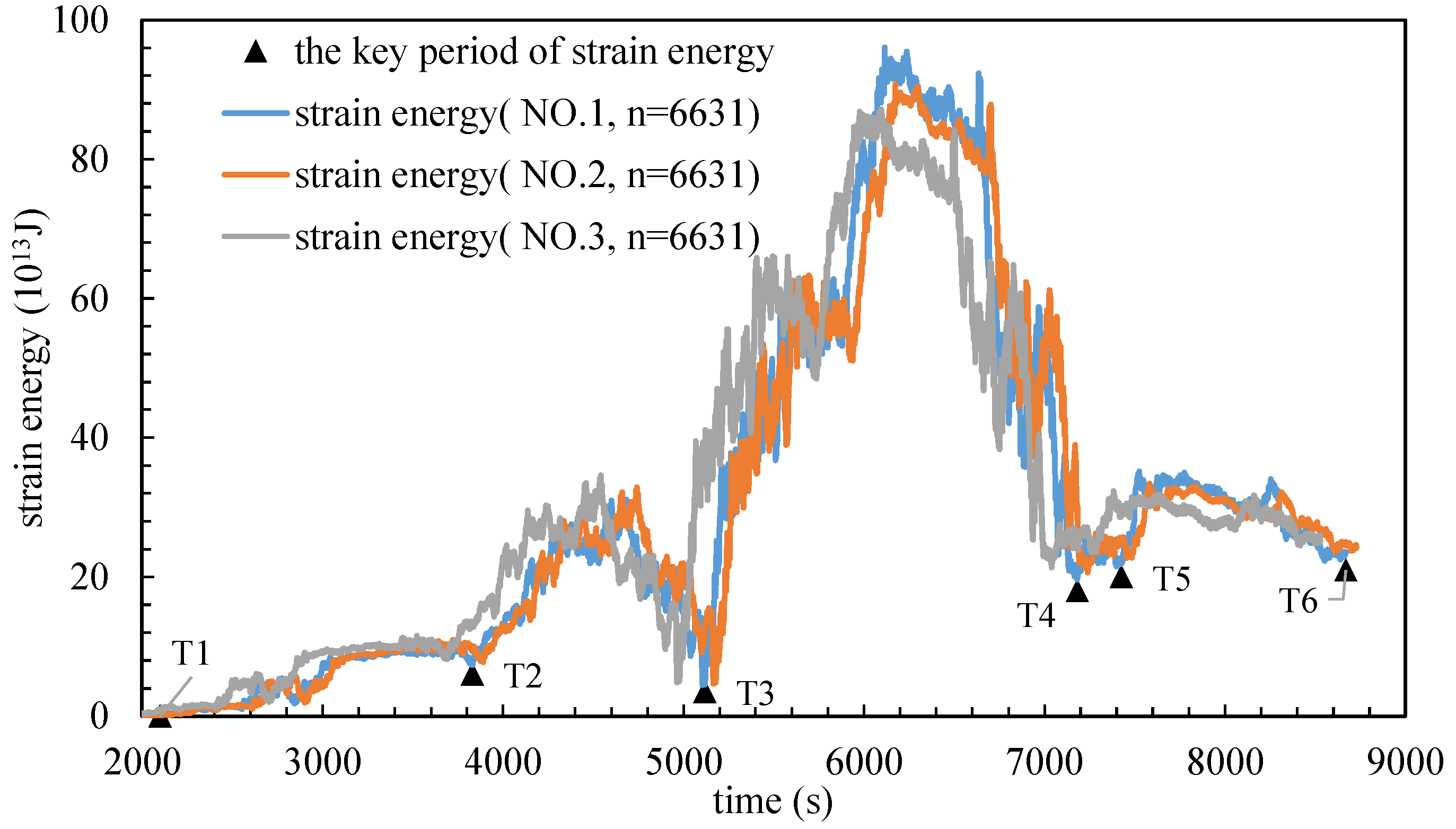
3.2. Strain Energy Density Variation during the Formation and Evolution of Normal Fault
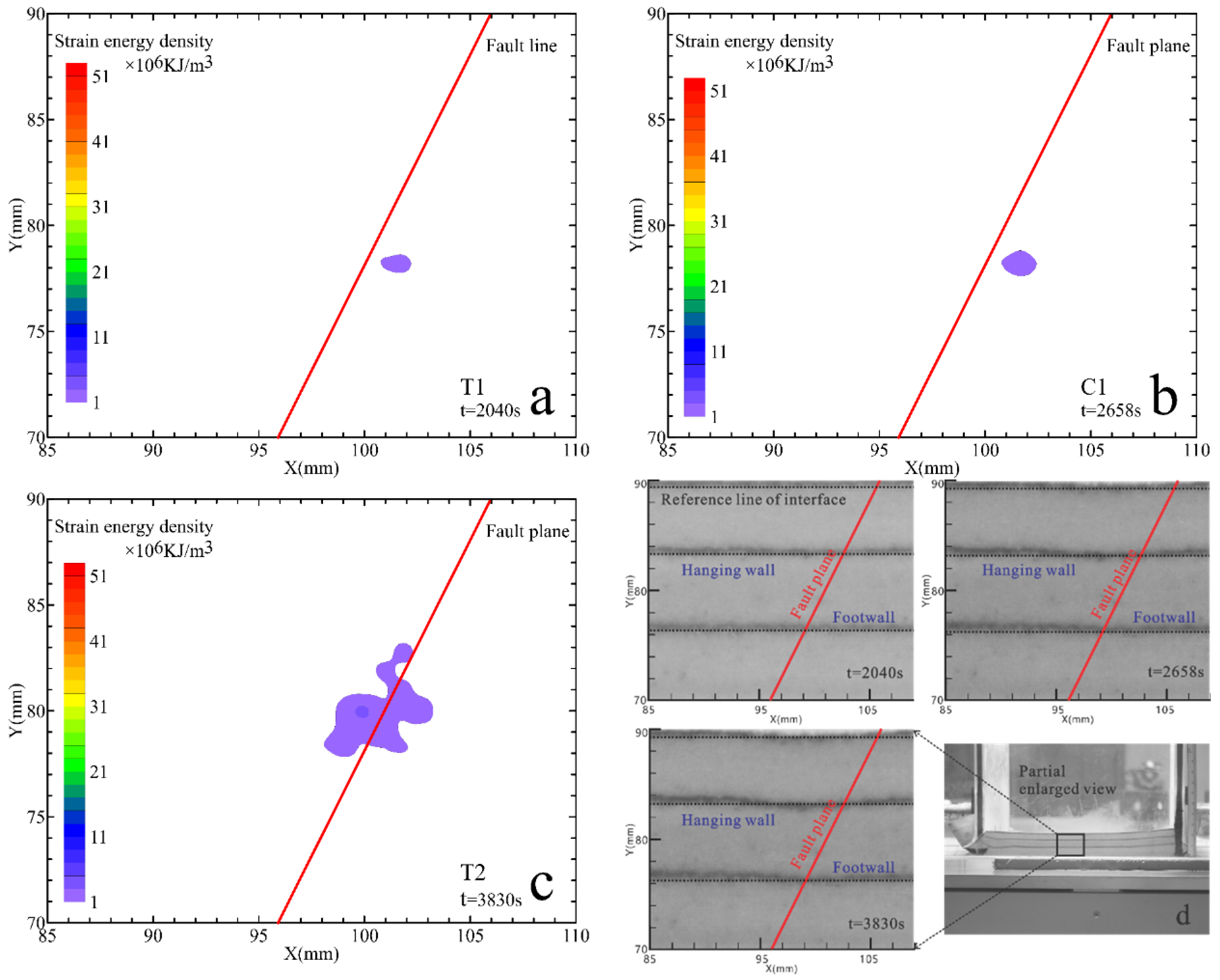
3.2.1. The Incubation Period (T1~T2)
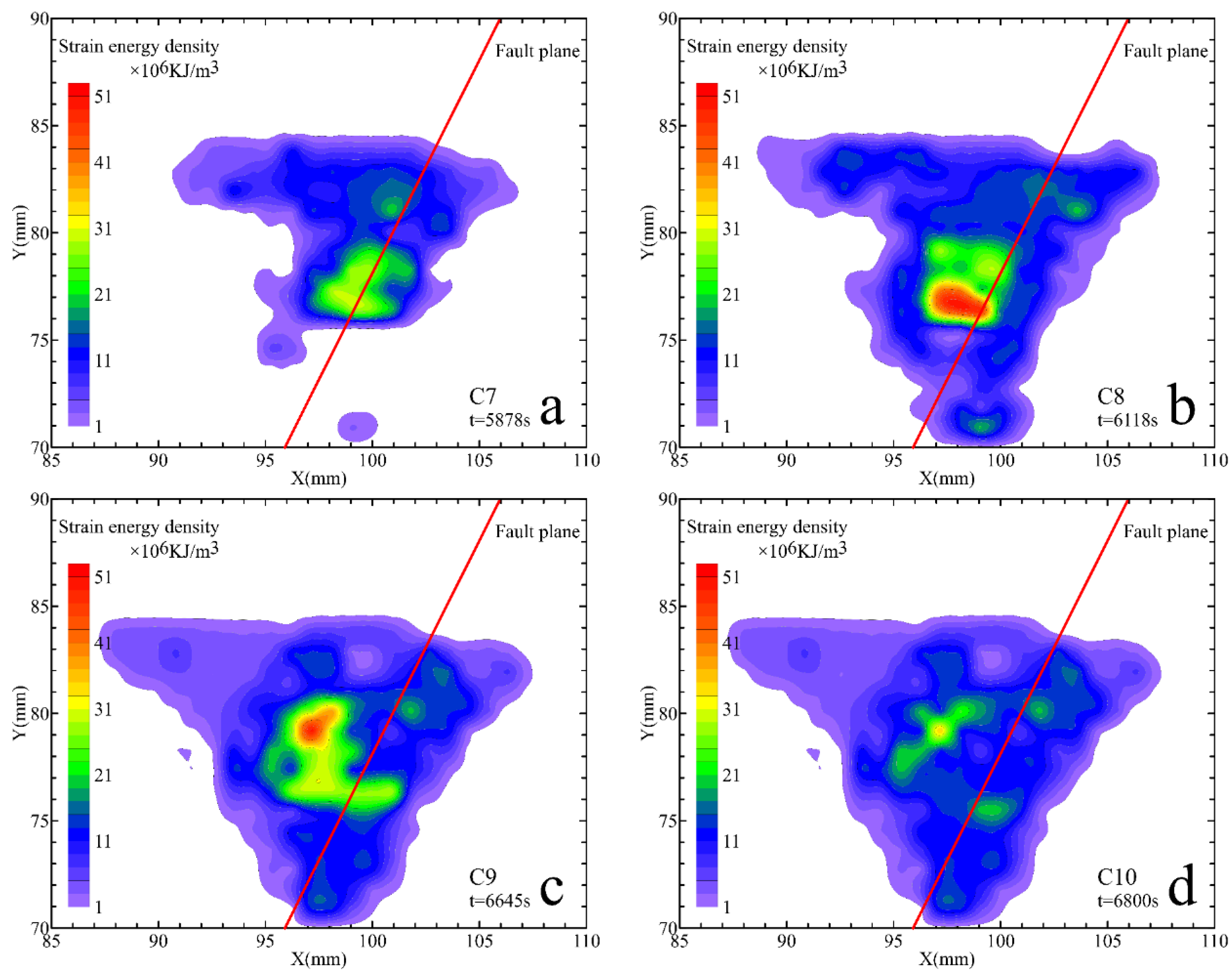
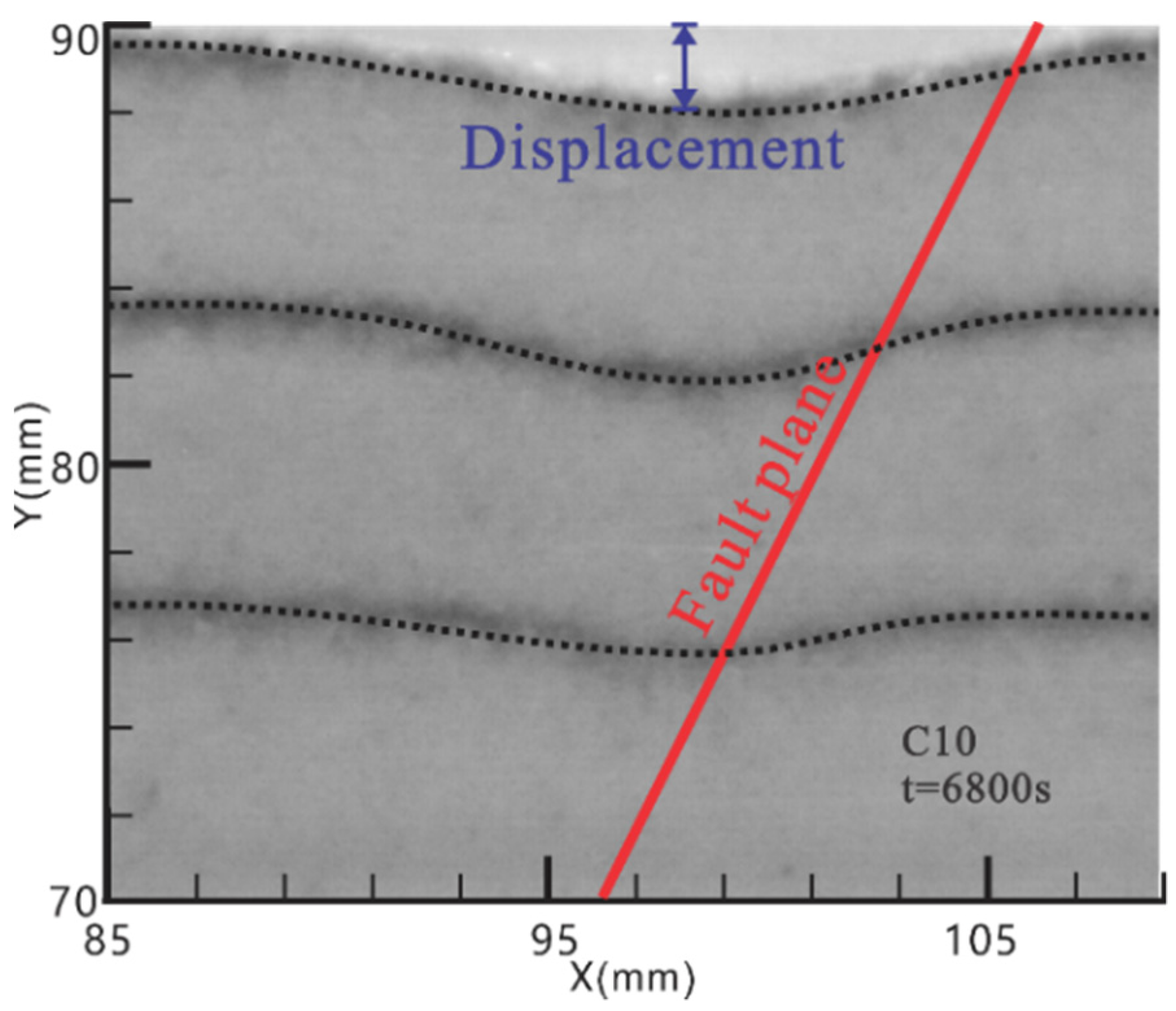
3.2.2. The Formative Period (T2~T5)
- The elementary stage (T2~T3)
- 2.
- The unstable stage (T3~T4)
- 3.
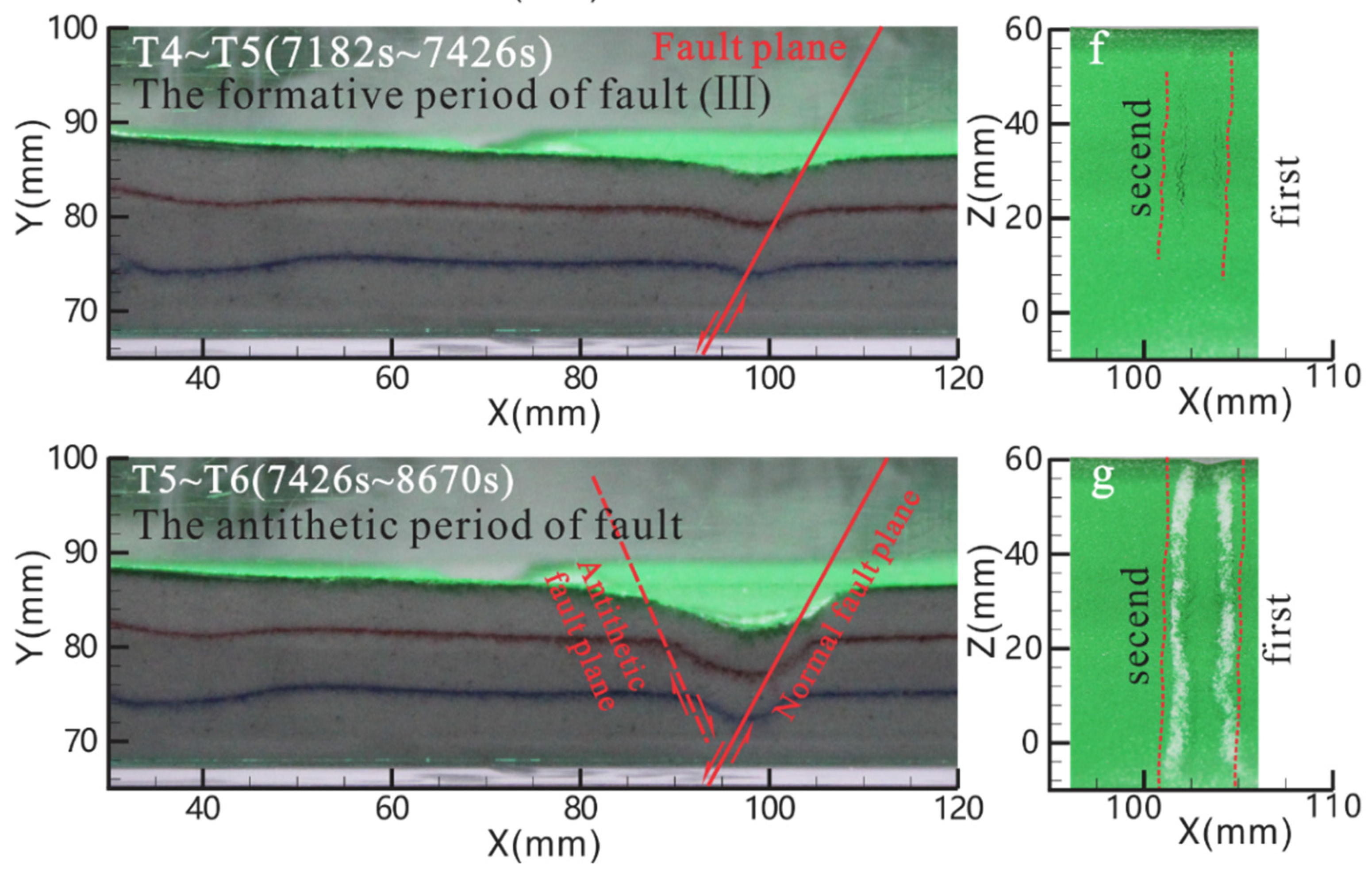
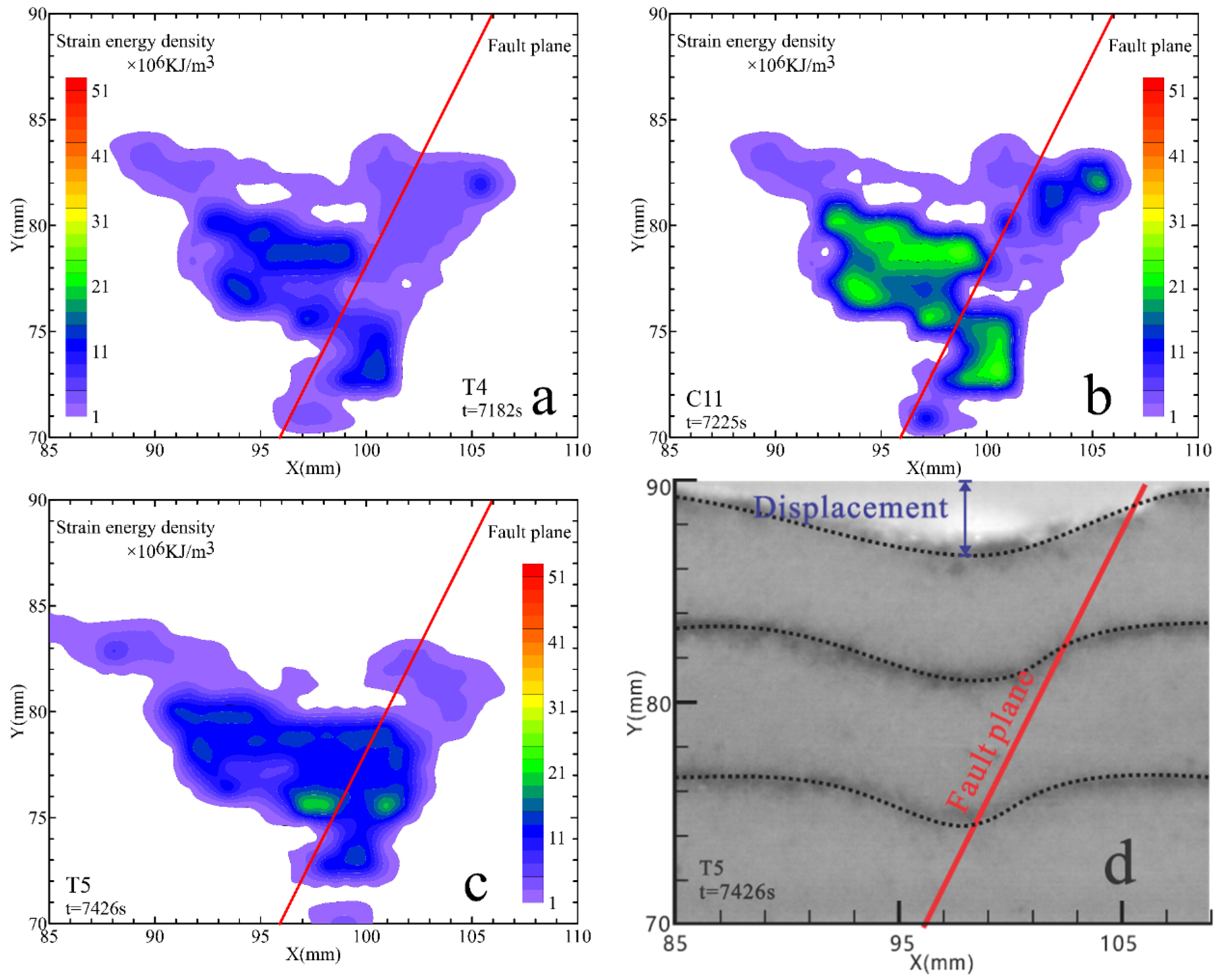
- The stable stage (T4~T5)
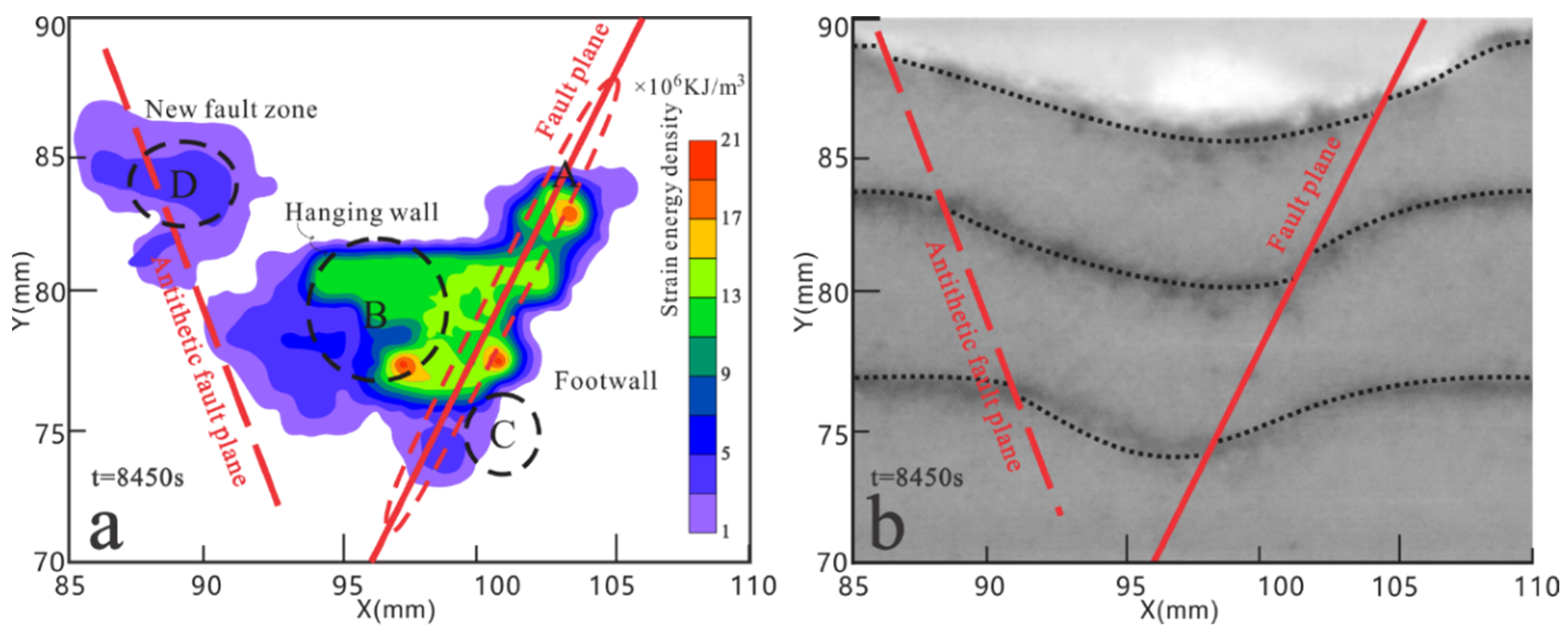
3.2.3. The Antithetic Fault Period (T5~T6)
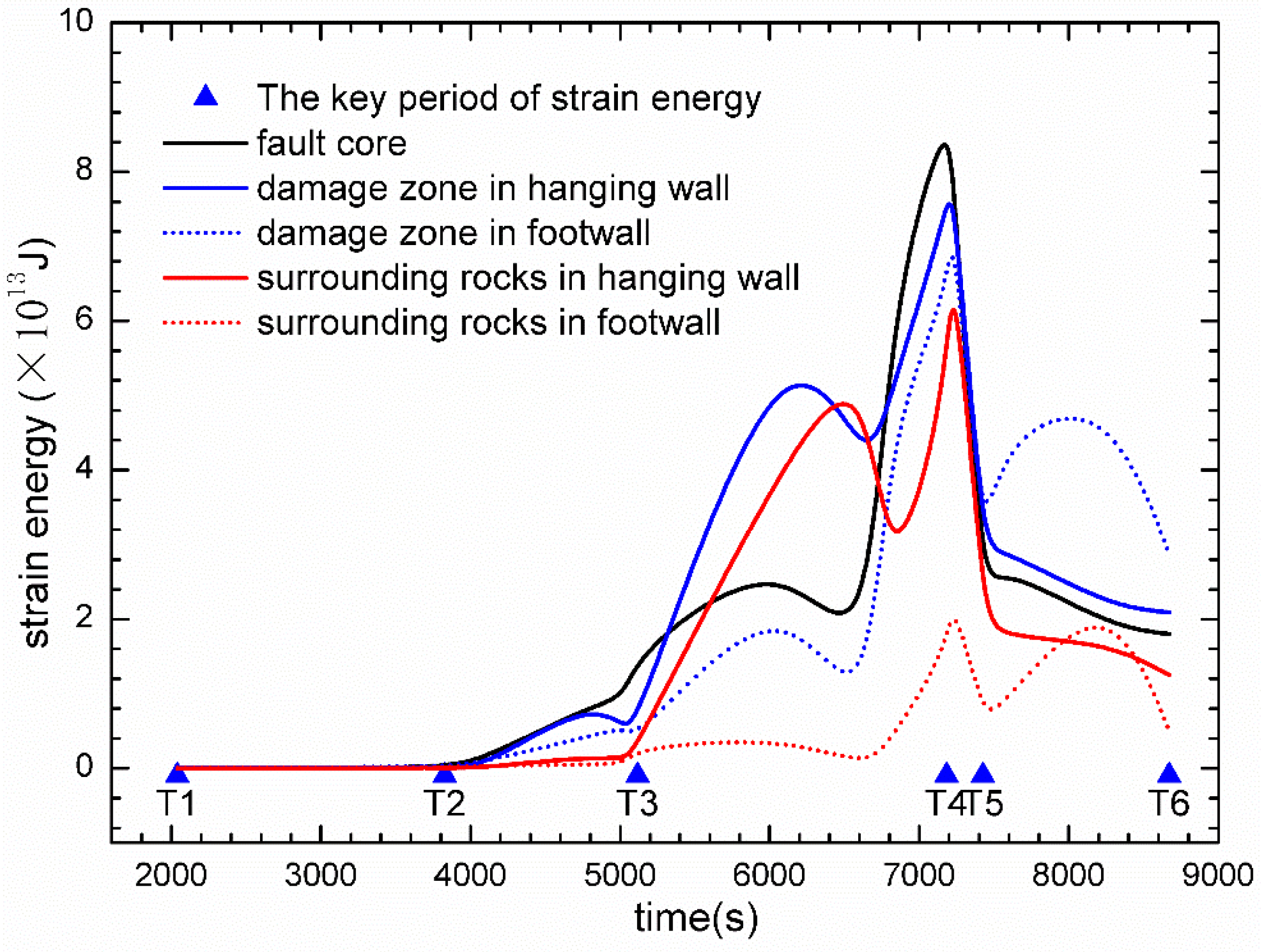
3.2.4. The Strain Energy of Each Period
3.3. Strain Energy Characteristics of Normal Fault
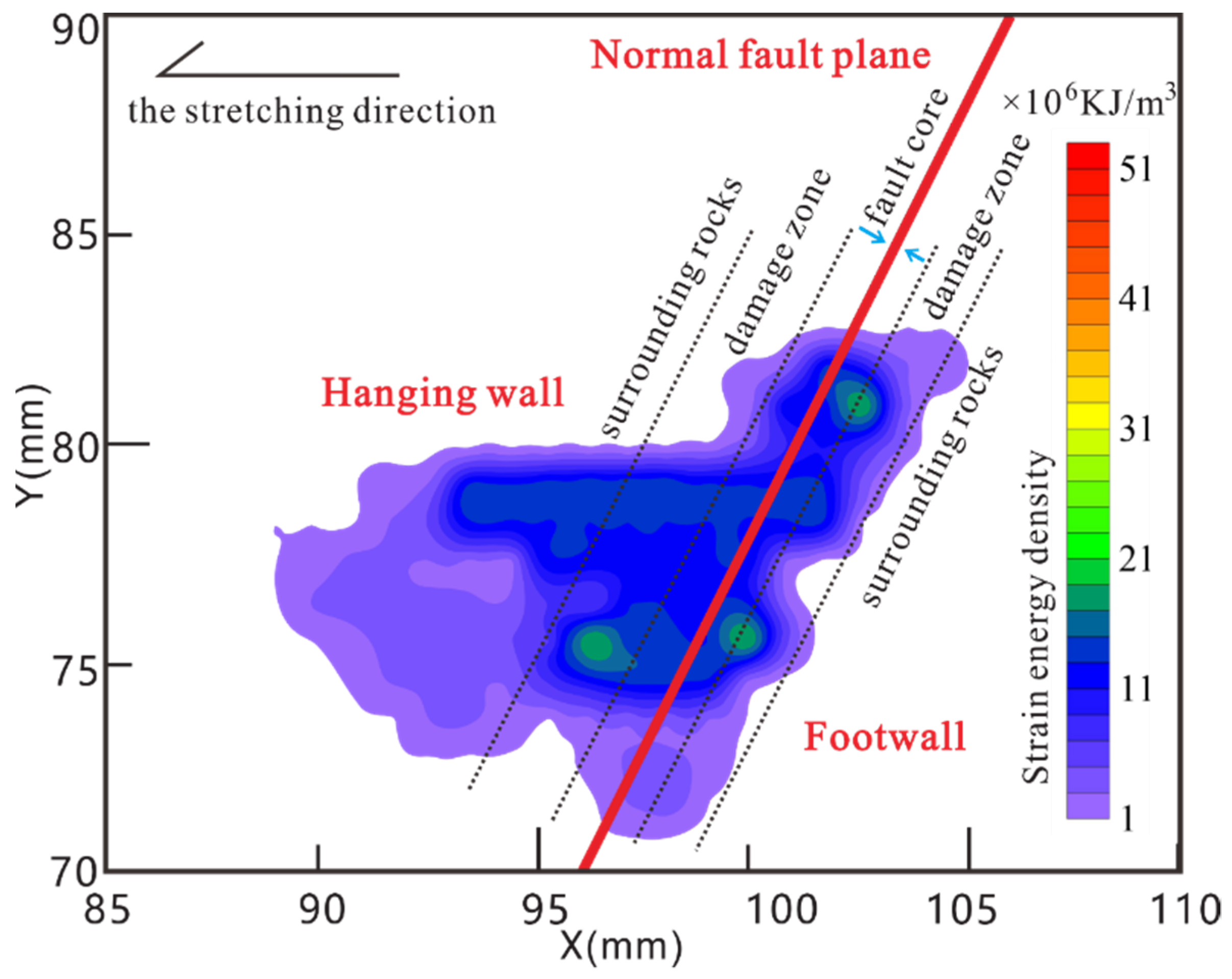
3.3.1. Distribution of Strain Energy Density
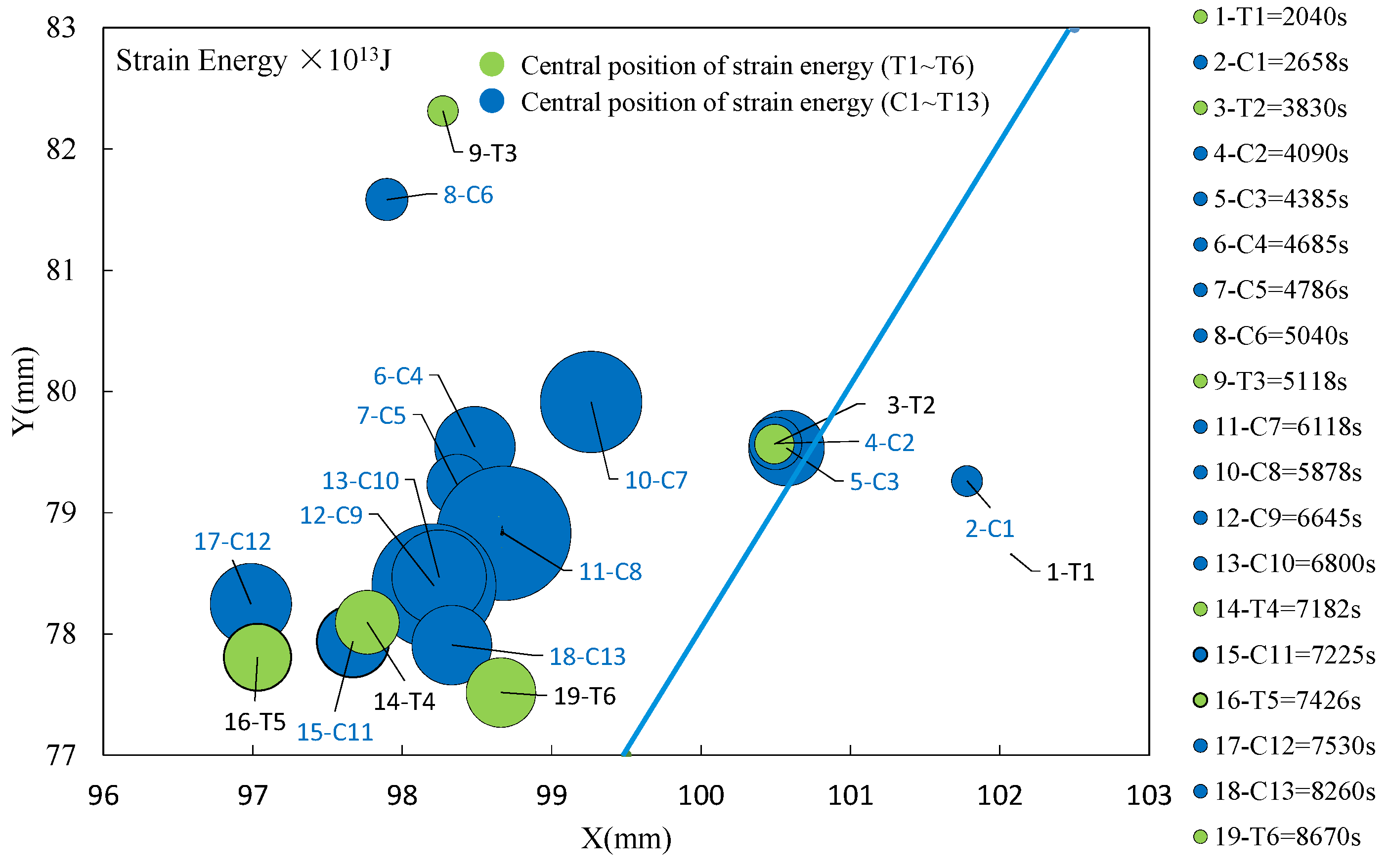
3.3.2. The Central Position of Strain Energy
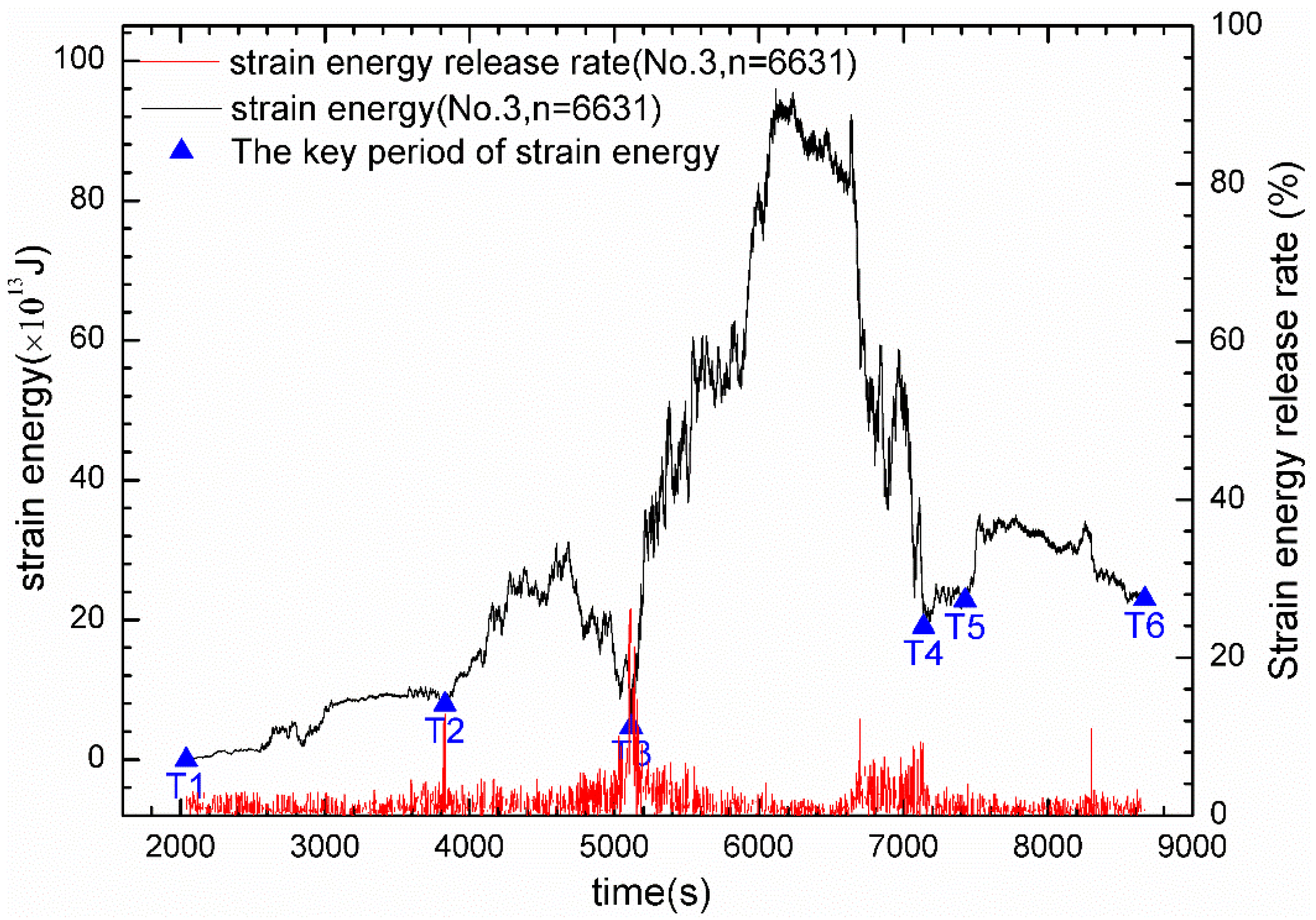
3.3.3. Strain Energy Release Rate
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Derivation of the Central Position of Strain Energy (CPSE)
References
- Wernicke, B.; Axen, G.J. On the role of isostasy in the evolution of normal fault systems. Geology 1988, 16, 848–851. [Google Scholar] [CrossRef]
- Martinsen, O.J.; Pulham, A.J.; Haughton, P.D.; Sullivan, M.D. Outcrops Revitalized: Tools, Techniques and Applications; SEPM Tulsa: Tulsa, OK, USA, 2011. [Google Scholar]
- Sibson, R. Fault rocks and fault mechanisms. J. Geol. Soc. 1977, 133, 191–213. [Google Scholar] [CrossRef]
- Bernabé, Y.; Revil, A. Pore-scale heterogeneity, energy dissipation and the transport properties of rocks. Geophys. Res. Lett. 1995, 22, 1529–1532. [Google Scholar] [CrossRef]
- Sujatha, V.; Kishen, J.C. Energy release rate due to friction at bimaterial interface in dams. J. Eng. Mech. 2003, 129, 793–800. [Google Scholar] [CrossRef]
- Zhao, Z. Research on Rock Deformation and Failure Based on Energy Dissipation and Energy Release; Sichuan University: Chengdu, China, 2007. [Google Scholar]
- Zhao, Z.; Lu, R.; Zhang, G. Analysis on Energy Transformation for Rock in the Whole Process of Deformation and Fracture. Min. Res. Dev. 2006, 26, 8–11. [Google Scholar]
- Faulkner, D.; Jackson, C.; Lunn, R.; Schlische, R.; Shipton, Z.; Wibberley, C.; Withjack, M. A review of recent developments concerning the structure, mechanics and fluid flow properties of fault zones. J. Struct. Geol. 2010, 32, 1557–1575. [Google Scholar] [CrossRef]
- Fajfar, P.; Vidic, T.; Fischinger, M. Seismic demand in medium and long period structures. Earthq. Eng. Struct. Dyn. 1989, 18, 1133–1144. [Google Scholar] [CrossRef]
- Sucuoglu, H. Effect of connection rigidity on seismic response of precast concrete frames. PCI J. 1995, 40, 94–103. [Google Scholar] [CrossRef]
- Teran-Gilmore, A. Performance-Based Earthquake-Resistant Design of Framed Buildings Using Energy Concepts; University of California: Berkeley, CA, USA, 1996. [Google Scholar]
- Uang, C.M.; Bertero, V.V. Evaluation of seismic energy in structures. Earthq. Eng. Struct. Dyn. 1990, 19, 77–90. [Google Scholar] [CrossRef]
- Akiyama, H. Earthquake Resistant Limit State Design for Buildings; University of Tokyo Press: Tokyo, Japan, 1985. [Google Scholar]
- Holt, W.; Chamot Rooke, N.; Le Pichon, X.; Haines, A.; Shen Tu, B.; Ren, J. Velocity field in Asia inferred from Quaternary fault slip rates and Global Positioning System observations. J. Geophys. Res. Solid Earth 2000, 105, 19185–19209. [Google Scholar] [CrossRef]
- Iinuma, T.; Ohzono, M.; Ohta, Y.; Miura, S. Coseismic slip distribution of the 2011 off the Pacific coast of Tohoku Earthquake (M 9.0) estimated based on GPS data—Was the asperity in Miyagi-oki ruptured? EarthPlanets Space 2011, 63, 24. [Google Scholar] [CrossRef] [Green Version]
- Jing, Y.; Li, H.; Xiong, Y.Z.; Fan, L.L.; Zhang, S.Z.; Sun, Q.-W.; Dong, J.Y.; Liu, F.-Q.; Wang, H.-Z. Use Seismic Moment Tensor and GPS Data to Analyse the Recent CrustalM ovement Energy Distribution Characteristics of China Continent. Geol. J. China Univ. 2009, 1, 011. [Google Scholar]
- He, M.; Miao, J.; Feng, J. Rock burst process of limestone and its acoustic emission characteristics under true-triaxial unloading conditions. Int. J. Rock Mech. Min. Sci. 2010, 47, 286–298. [Google Scholar] [CrossRef]
- Sih, G.C. Strain energy density factor applied to mixed mode crack problems. Int. J. Fract. 1974, 10, 305–321. [Google Scholar] [CrossRef]
- Young, W.C.; Budnyas, R.G. Roark’s Formulas for Stress and Strain; McGraw-Hill: New York, NY, USA, 2017. [Google Scholar]
- Gutscher, M.A.; Klaeschen, D.; Flueh, E.; Malavieille, J. Non-Coulomb wedges, wrong-way thrusting, and natural hazards in Cascadia. Geology 2001, 29, 379–382. [Google Scholar] [CrossRef]
- Lohrmann, J.; Kukowski, N.; Adam, J.; Oncken, O. The impact of analogue material properties on the geometry, kinematics, and dynamics of convergent sand wedges. J. Struct. Geol. 2003, 25, 1691–1711. [Google Scholar] [CrossRef]
- Waltham, D. Folding and faulting in coulomb materials. Basin Res. 2002, 14, 319–328. [Google Scholar] [CrossRef]
- Cloos, E. Experimental analysis of Gulf Coast fracture patterns. AAPG Bull. 1968, 52, 420–444. [Google Scholar]
- McClay, K. Extensional fault systems in sedimentary basins: A review of analogue model studies. Mar. Pet. Geol. 1990, 7, 206–233. [Google Scholar] [CrossRef]
- De Pater, C.; Cleary, M.; Quinn, T.; Barr, D.; Johnson, D.; Weijers, L. Experimental verification of dimensional analysis for hydraulic fracturing. SPE Prod. Facil. 1994, 9, 230–238. [Google Scholar] [CrossRef]
- Bonini, M.; Corti, G.; Ventisette, C.D.; Manetti, P.; Mulugeta, G.; Sokoutis, D. Modelling the lithospheric rheology control on the Cretaceous rifting in West Antarctica. Terra Nova 2007, 19, 360–366. [Google Scholar] [CrossRef]
- Costa, E.; Vendeville, B. Experimental insights on the geometry and kinematics of fold-and-thrust belts above weak, viscous evaporitic décollement. J. Struct. Geol. 2002, 24, 1729–1739. [Google Scholar] [CrossRef]
- Hubbert, M.K. Theory of scale models as applied to the study of geologic structures. Bull. Geol. Soc. Am. 1937, 48, 1459–1520. [Google Scholar] [CrossRef]
- Bonini, M. Deformation patterns and structural vergence in brittle–ductile thrust wedges: An additional analogue modelling perspective. J. Struct. Geol. 2007, 29, 141–158. [Google Scholar] [CrossRef]
- Cotton, J.T.; Koyi, H.A. Modeling of thrust fronts above ductile and frictional detachments: Application to structures in the Salt Range and Potwar Plateau, Pakistan. Geol. Soc. Am. Bull. 2000, 112, 351–363. [Google Scholar] [CrossRef]
- Xu, S.; Fukuyama, E.; Yamashita, F.; Mizoguchi, K.; Takizawa, S.; Kawakata, H. Strain rate effect on fault slip and rupture evolution: Insight from meter-scale rock friction experiments. Tectonophysics 2018, 733, 209–231. [Google Scholar] [CrossRef]
- Couzens-Schultz, B.A.; Vendeville, B.C.; Wiltschko, D.V. Duplex style and triangle zone formation: Insights from physical modeling. J. Struct. Geol. 2003, 25, 1623–1644. [Google Scholar] [CrossRef]
- Leturmy, P.; Mugnier, J.; Vinour, P.; Baby, P.; Colletta, B.; Chabron, E. Piggyback basin development above a thin-skinned thrust belt with two detachment levels as a function of interactions between tectonic and superficial mass transfer: The case of the Subandean Zone (Bolivia). Tectonophysics 2000, 320, 45–67. [Google Scholar] [CrossRef]
- Adam, J.; Urai, J.; Wieneke, B.; Oncken, O.; Pfeiffer, K.; Kukowski, N.; Lohrmann, J.; Hoth, S.; Van Der Zee, W.; Schmatz, J. Shear localisation and strain distribution during tectonic faulting—New insights from granular-flow experiments and high-resolution optical image correlation techniques. J. Struct. Geol. 2005, 27, 283–301. [Google Scholar] [CrossRef]
- White, D.; Take, W.; Bolton, M. Soil deformation measurement using particle image velocimetry (PIV) and photogrammetry. Geotechnique 2003, 53, 619–631. [Google Scholar] [CrossRef]
- White, D.J.; Take, W.; Bolton, M. Measuring soil deformation in geotechnical models using digital images and PIV analysis. In Proceedings of the International Conference on Computer Methods and Advances in Geomechanics, Tucson, AZ, USA, 7–12 January 2001; pp. 997–1002. [Google Scholar]
- Guide to the Expression of Uncertainty in Measurement, Joint Committee for Guides in Metrology (JCGM) 100:2008. Available online: https://www.bipm.org/documents/20126/2071204/JCGM_100_2008_E.pdf/cb0ef43f-baa5-11cf-3f85-4dcd86f77bd6 (accessed on 5 September 2008).
- Golijanek-Jędrzejczyk, A.; Mrowiec, A.; Hanus, R.; Zych, M.; Świsulski, D. Uncertainty of mass flow measurement using centric and eccentric orifice for Reynolds number in the range 10,000 ≤ Re ≤ 20,000. Measurement 2020, 160, 107851. [Google Scholar] [CrossRef]
- Golijanek-Jędrzejczyk, A.; Mrowiec, A.; Hanus, R.; Zych, M.; Świsulski, D. Determination of the uncertainty of mass flow measurement using the orifice for different values of the Reynolds number. Eur. Phys. J. Conf. 2019, 213, 02022. [Google Scholar] [CrossRef]
- Lahee, F.H. Field Geology; McGraw-Hill Book Company, Incorporated: New York, NY, USA, 1923. [Google Scholar]
- Newmark, N.M.; Hall, W.J. Pipeline design to resist large fault displacement. In Proceedings of the US National Conference on Earthquake Engineering, Ann Arbor, MI, USA, 18–20 June 1975; pp. 416–425. [Google Scholar]
- Solecki, R.; Conant, R.J. Advanced Mechanics of Materials; Oxford University Press: New York, NY, USA, 2003; Volume 198. [Google Scholar]
- Ding, Y.; Zhu, X. Probe into Input Energy for the Characterization of Earthquake Ground Motions. J. Beijing Jiaotong Univ. 2007, 31, 49–51. [Google Scholar]
- Hussain, M.; Pu, S.; Underwood, J. Strain energy release rate for a crack under combined mode I and mode II. In Fracture Analysis: Proceedings of the 1973 National Symposium on Fracture Mechanics; Part II; ASTM International: West Conshohocken, PA, USA, 1974. [Google Scholar]
- Ye, Q.; Yuan, M. Explanations of Common Terms in Oil and Gas Field Development; Petroleum Industry Press: Conshohocken, PA, USA, 1996. [Google Scholar]
- Reid, H.F. The mechanics of the earthquake. In The California Earthquake of April 18, 1906, Report of the State Earthquake Investigation Commission; The Caknegie Institution of Washington: Washington, DC, USA, 1910. [Google Scholar]
- Caine, J.S.; Evans, J.P.; Forster, C.B. Fault zone architecture and permeability structure. Geology 1996, 24, 1025–1028. [Google Scholar] [CrossRef]
- Doughty, P.T. Clay smear seals and fault sealing potential of an exhumed growth fault, Rio Grande rift, New Mexico. AAPG Bull. 2003, 87, 427–444. [Google Scholar] [CrossRef]
- Zhang, L.; Lv, Y.; Peng, Y.; Xie, Z. Analysis of Seismological Energy Density of Minor-moderate Earthquakes. Earthq. Res. China 2008, 24, 407–414. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units | Model | Prototype | Similarity Ratio |
|---|---|---|---|---|
| geometric similarity (L*) | cm | 40 (length) | 20.0 × 105 | 2 × 10−5 |
| 35 (width) | 17.5 × 105 | 2 × 10−5 | ||
| Density (ρ*) | kg/m3 | 1.35 × 10 3 | 2.7 × 103 | 0.5 |
| acceleration of gravity (g*) | m/s 2 | 9.8 | 9.8 | 1 |
| dynamic similarity (σ*) | σ* = ρ* × g* × L* = 0.5 × 1 × 2 × 10−5 | 1 × 10−5 | ||
| coefficient of viscosity (η*) | Pa·s | 1 × 104 (★) | 1 × 1019 (★) | 1 × 10−15 |
| Kinematic similarity (v*) | v* = σ*/η* × L* = (1 × 10−5)/(1 × 10−15) × (2 × 10−5) | 2 × 105 | ||
| Velocity [mm/s] | Mean | Standard Deviation | SE of Mean | Lower 95% CI of Mean | Upper 95% CI of Mean | Mean Absolute Deviation |
|---|---|---|---|---|---|---|
| total | 0.439 | 0.03927 | 0.00674 | 0.42611 | 0.45341 | 0.03211 |
| U | 0.413 | 0.03171 | 0.00544 | 0.40247 | 0.42459 | 0.02685 |
| V | 0.145 | 0.03671 | 0.00629 | 0.13249 | 0.15811 | 0.03035 |
| Timepoint | Time, s | Strain Energy, ×1013 J |
|---|---|---|
| T1 | 2040 | 0.0161 |
| T2 | 3830 | 7.9011 |
| T3 | 5118 | 4.7146 |
| T4 | 7182 | 19.2356 |
| T5 | 7426 | 22.7641 |
| T6 | 8670 | 23.2352 |
| Items | Incubation Period | Formative Period | Antithetic Faults Period | ||
|---|---|---|---|---|---|
| Elementary Stage | Unstable Stage | Stable Stage | |||
| time point (s) | T1~T2 (2040~3830) | T2~T3 (3830~5118) | T3~T4 (5118~7182) | T4~T5 (7182~7426) | T5~T6 (7426~8670) |
| dip angle (α, °) | almost 0 | 0~3 | close to 70 | decline | stable |
| fault displacement (L, m) | 0 | 0 | increase rapidly | stable | increase rapidly |
| Normal Fault Zones | Range in the Prototype, m | Range in the Model, mm |
|---|---|---|
| Fault core | (0, 50] | (0, 1] |
| damage zone in the hanging wall | (50, 140] | (1, 2.8] |
| damage zone in the footwall | (50, 125] | (1, 2.5] |
| Surrounding rocks in the hanging wall | (140, ∞) | (2.8, ∞) |
| Surrounding rocks in the footwall | (125, ∞) | (2.5, ∞) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, X.; Deng, H.; He, J.; Chen, H.; Zhang, Y. Research on the Evolution and Damage Mechanism of Normal Fault Based on Physical Simulation Experiments and Particle Image Velocimetry Technique. Energies 2021, 14, 2825. https://doi.org/10.3390/en14102825
Peng X, Deng H, He J, Chen H, Zhang Y. Research on the Evolution and Damage Mechanism of Normal Fault Based on Physical Simulation Experiments and Particle Image Velocimetry Technique. Energies. 2021; 14(10):2825. https://doi.org/10.3390/en14102825
Chicago/Turabian StylePeng, Xianfeng, Hucheng Deng, Jianhua He, Hongde Chen, and Yeyu Zhang. 2021. "Research on the Evolution and Damage Mechanism of Normal Fault Based on Physical Simulation Experiments and Particle Image Velocimetry Technique" Energies 14, no. 10: 2825. https://doi.org/10.3390/en14102825
APA StylePeng, X., Deng, H., He, J., Chen, H., & Zhang, Y. (2021). Research on the Evolution and Damage Mechanism of Normal Fault Based on Physical Simulation Experiments and Particle Image Velocimetry Technique. Energies, 14(10), 2825. https://doi.org/10.3390/en14102825