
Deep Learning for High-Impedance Fault Detection: Convolutional Autoencoders



Abstract
1. Introduction
2. Unsupervised Learning with Autoencoders
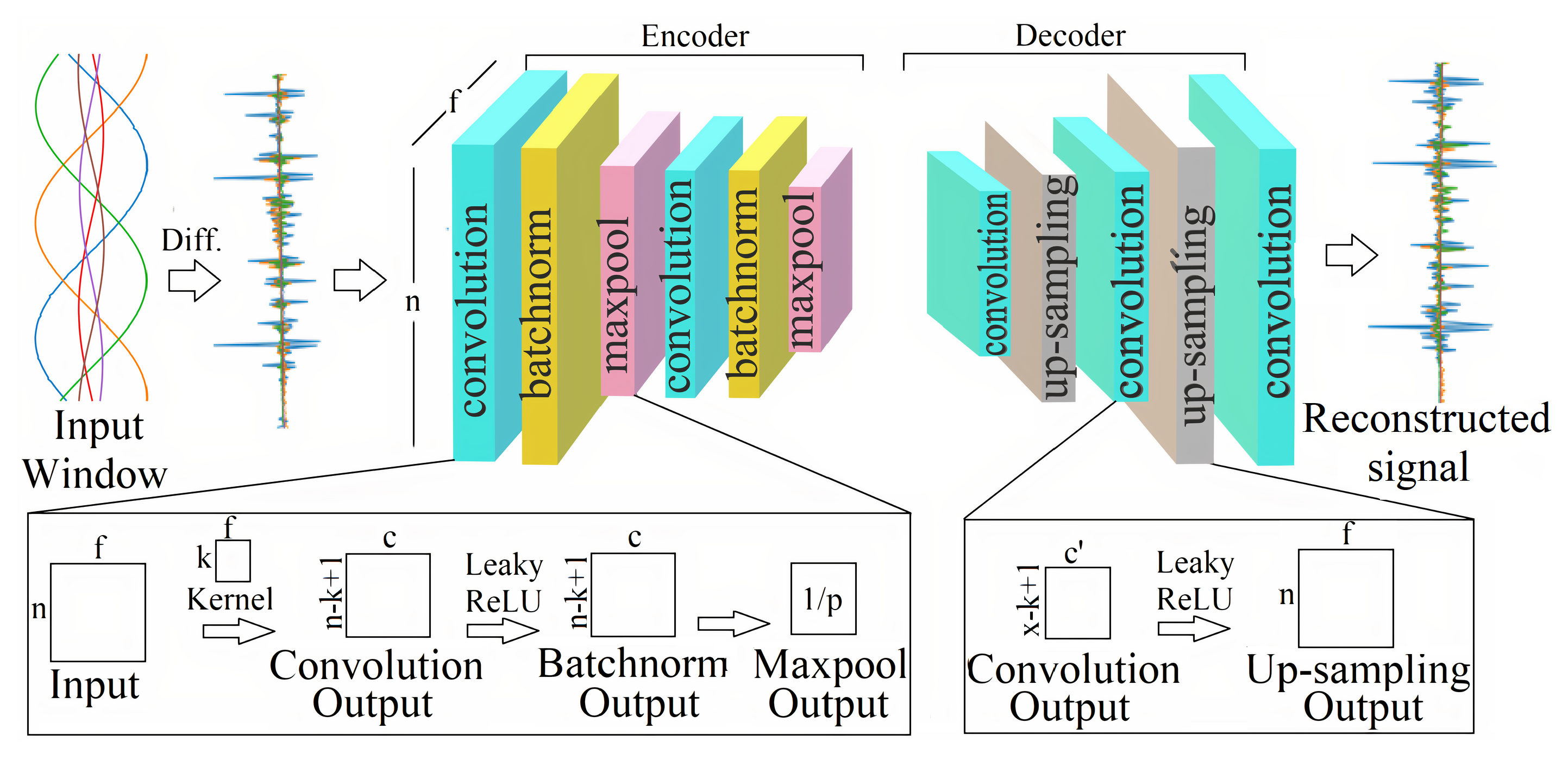
3. Convolutional Autoencoder for HIF Detection
3.1. Data Preprocessing
3.2. Offline Training
3.3. HIF Detection
4. Evaluation
4.1. Study System
4.2. CAE-HIFD Model Training
4.3. Effects of CAE-HIFD’s Components
4.4. CAE-HIFD Response to Different Case Studies
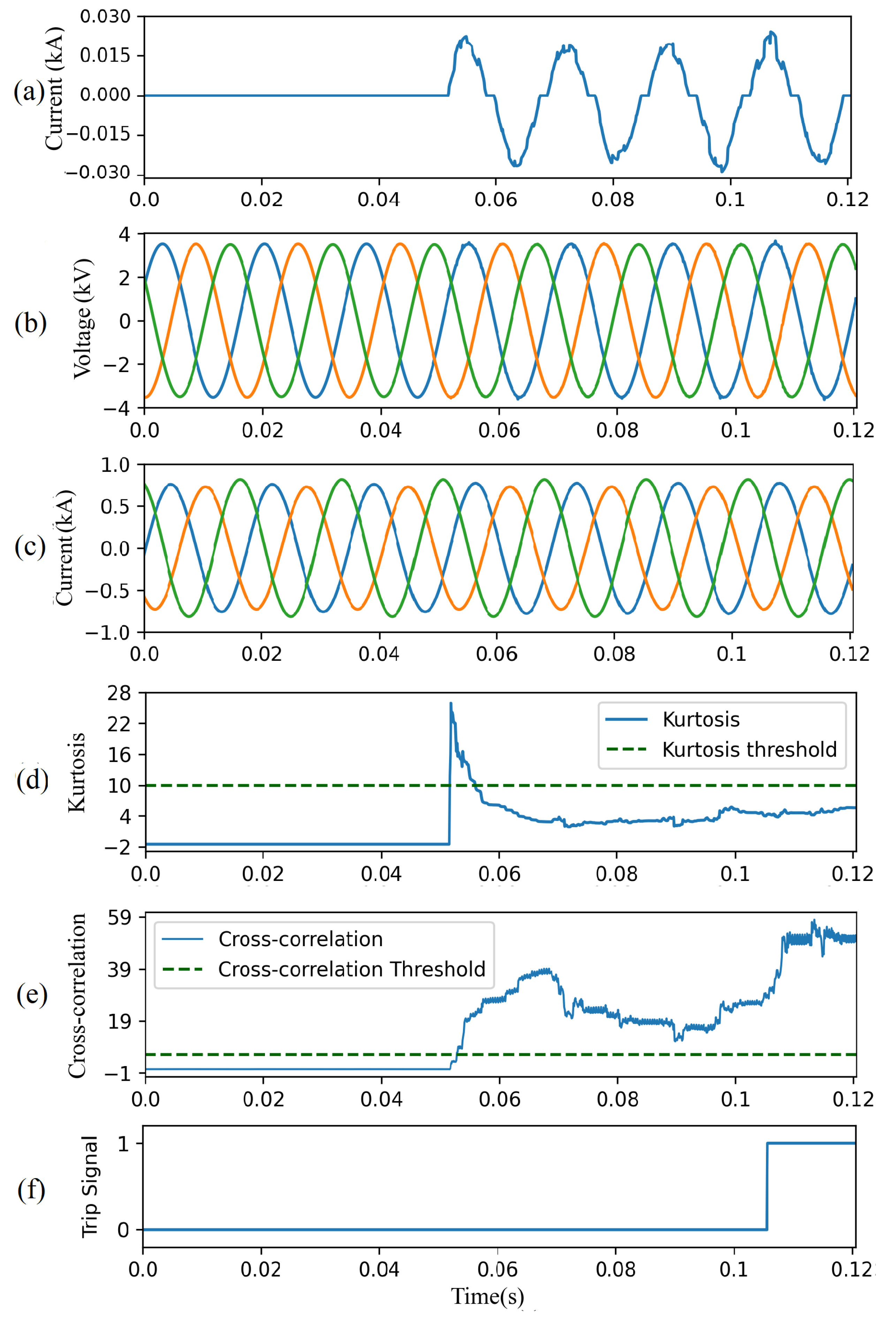
4.4.1. Case Study I—Close-in HIF
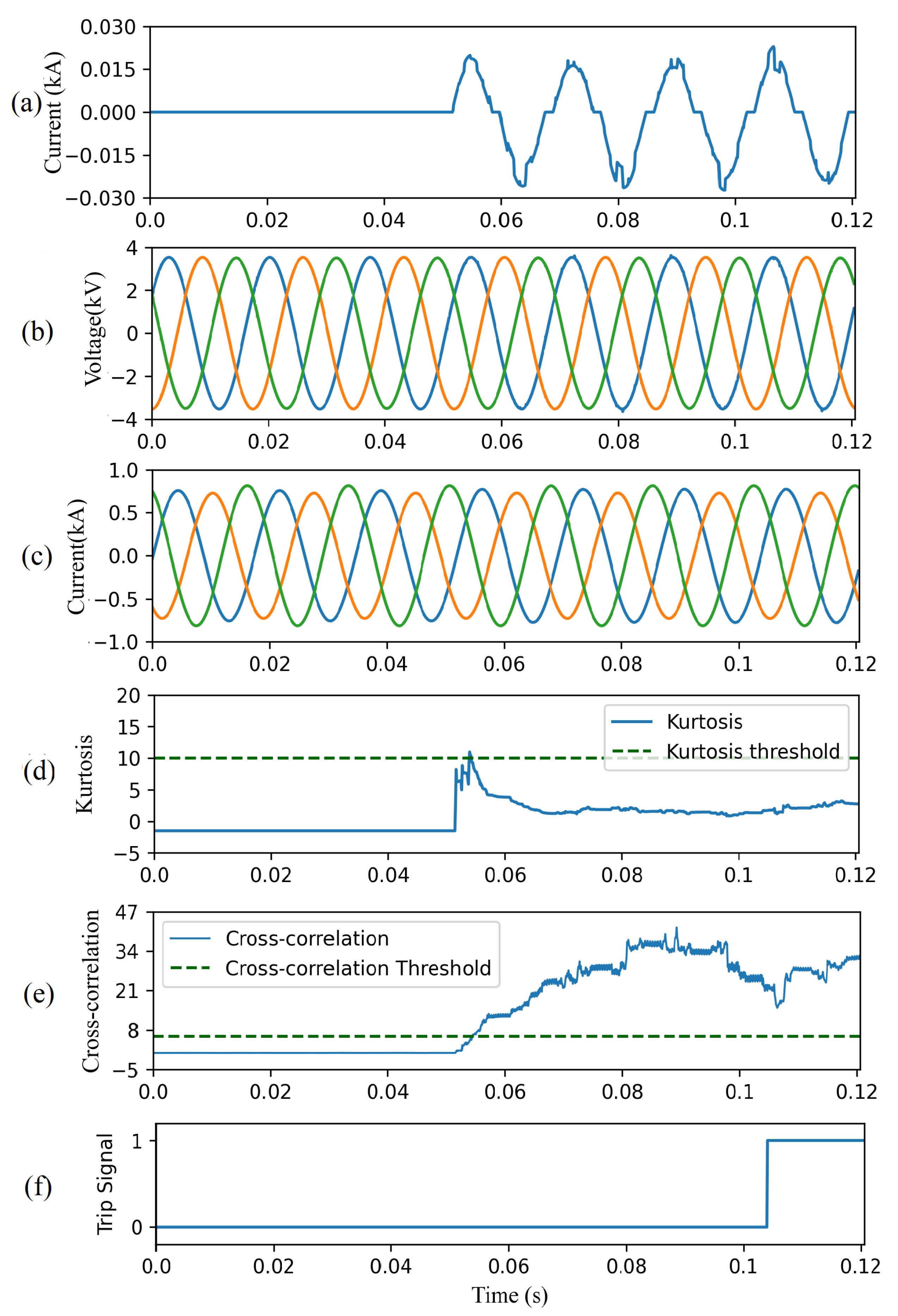
4.4.2. Case Study II—Remote HIF
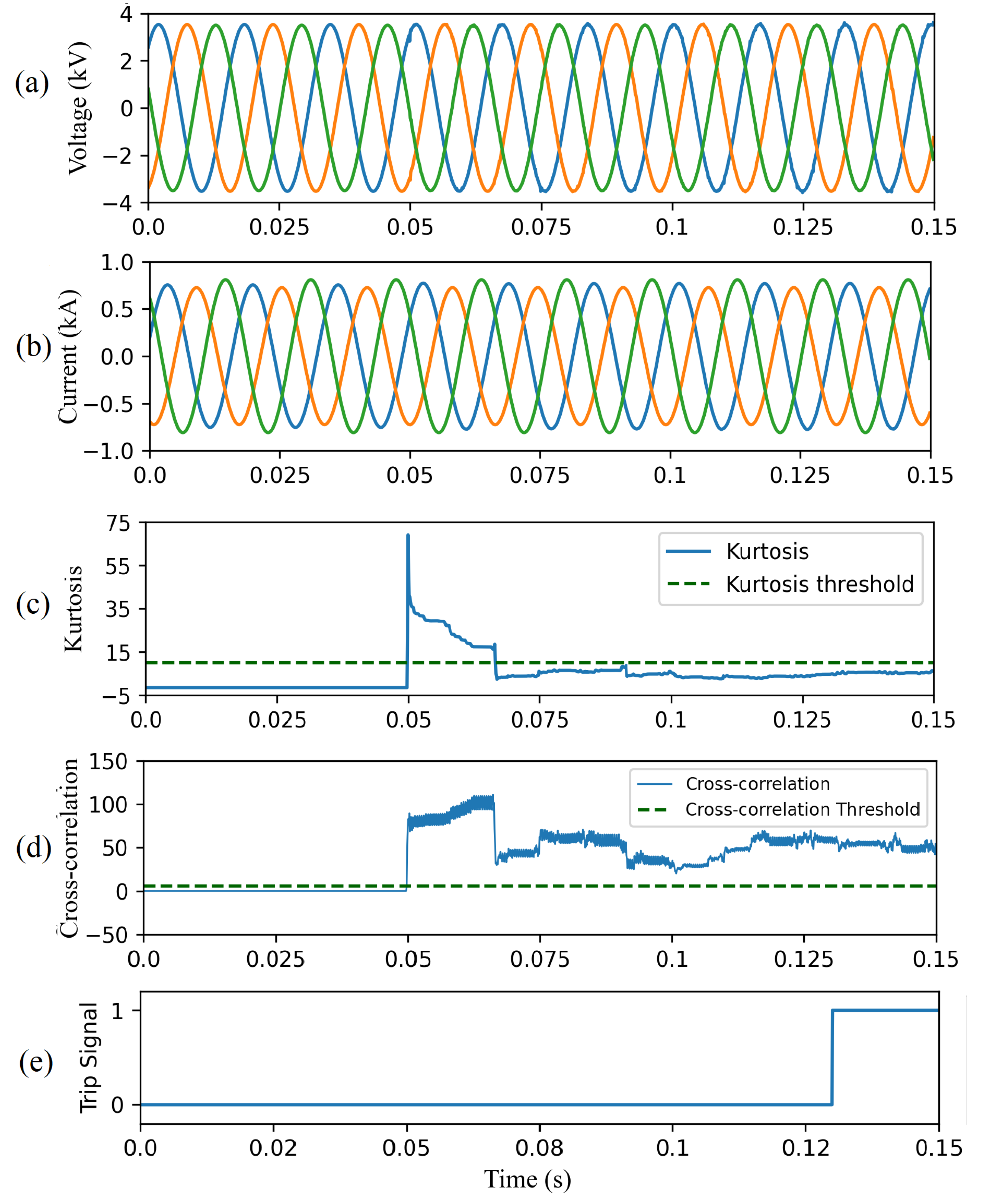
4.4.3. Case Study III—Capacitor Switching
4.4.4. Case Study IV—Non-linear Load
4.4.5. Case Study V—Transformer Energization
4.4.6. Case Study VI—Intermittent HIFs
4.4.7. Case Study VII—Frequency Deviations
4.5. Comparison with Other Approaches
4.6. Robustness of the Proposed CAE-HIF against Noise
4.7. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAE-HIFD | Convolutional Autoencoder framework for HIF Detection |
| CAE | Convolutional Autoencoder |
| HIF | High-Impedance Fault |
| EMD | Empirical Mode Decomposition |
| VMD | Variational Mode Decomposition |
| ML | Machine Learning |
| SVM | Support Vector Machine |
| SNR | Signal to Noise Ratio |
| DWT | Discrete Wavelet Transform |
| WT | Wavelet Transform |
| CNN | Convolutional Neural Network |
| CC | Cross-Correlation |
| MSE | Mean Squared Error |
| ReLU | Rectified Linear Unit |
| K | Kurtosis |
| Acc | Accuracy |
| Dep | Dependability |
| Saf | Safety |
| Sen | sensibility |
| TP | True Positives |
| TN | True Negatives |
| FN | False Negatives |
| FP | False Positives |
| GSCV | Grid Search Cross-Validation |
| ANN | Artificial Neural Network |
| GRU-AE | Gated Recurrent Units Autoencoder |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | Load Model | Phase 1 (kW) | Phase 1 (kVar) | Phase 2 (kW) | Phase 2 (kVar) | Phase 3 (kW) | Phase 3 (kVar) |
|---|---|---|---|---|---|---|---|
| 634 | Y-PQ | 160 | 110 | 120 | 90 | 120 | 90 |
| 645 | Y-PQ | 0 | 0 | 170 | 125 | 0 | 0 |
| 646 | D-Z | 0 | 0 | 230 | 132 | 0 | 0 |
| 652 | Y-Z | 128 | 86 | 0 | 0 | 0 | 0 |
| 671 | D-PQ | 385 | 220 | 385 | 220 | 385 | 220 |
| 675 | Y-PQ | 485 | 190 | 68 | 60 | 290 | 212 |
| 692 | D-I | 0 | 0 | 0 | 0 | 170 | 151 |
| 611 | Y-I | 0 | 0 | 0 | 0 | 170 | 80 |
| Total | 1158 | 606 | 973 | 627 | 1135 | 735 |
| Node A | Node B | Length (ft) | Phasing |
|---|---|---|---|
| 632 | 645 | 500 | C, B, N |
| 632 | 633 | 500 | C, A, B, N |
| 633 | 634 | 0 | Transformer |
| 645 | 646 | 300 | C, B, N |
| 650 | 632 | 2000 | B, A, C, N |
| 684 | 652 | 800 | A, N |
| 632 | 671 | 2000 | B, A, C, N |
| 671 | 684 | 300 | A, C, N |
| 671 | 680 | 1000 | B, A, C, N |
| 671 | 692 | 0 | Switch |
| 684 | 611 | 300 | C, N |
| 692 | 675 | 500 | A, B, C, N |
References
- Wang, B.; Geng, J.; Dong, X. High-Impedance Fault Detection Based on Nonlinear Voltage–Current Characteristic Profile Identification. IEEE Trans. Smart Grid 2018, 9, 3783–3791. [Google Scholar] [CrossRef]
- Gautam, S.; Brahma, S.M. Detection of High Impedance Fault in Power Distribution Systems Using Mathematical Morphology. IEEE Trans. Power Syst. 2013, 28, 1226–1234. [Google Scholar] [CrossRef]
- Cui, Q.; El-Arroudi, K.; Weng, Y. A Feature Selection Method for High Impedance Fault Detection. IEEE Trans. Power Deliv. 2019, 34, 1203–1215. [Google Scholar] [CrossRef]
- Ghaderi, A.; Ginn, H.L., III; Mohammadpour, H.A. High impedance fault detection: A review. Electr. Power Syst. Res. 2017, 143, 376–388. [Google Scholar] [CrossRef]
- Wang, X.; Gao, J.; Wei, X.; Song, G.; Wu, L.; Liu, J.; Zeng, Z.; Kheshti, M. High Impedance Fault Detection Method Based on Variational Mode Decomposition and Teager–Kaiser Energy Operators for Distribution Network. IEEE Trans. Smart Grid 2019, 10, 6041–6054. [Google Scholar] [CrossRef]
- Chaitanya, B.K.; Yadav, A.; Pazoki, M. An Intelligent Detection of High-Impedance Faults for Distribution Lines Integrated With Distributed Generators. IEEE Syst. J. 2020, 14, 870–879. [Google Scholar] [CrossRef]
- Wang, B.; Ni, J.; Geng, J.; Lu, Y.; Dong, X. Arc flash fault detection in wind farm collection feeders based on current waveform analysis. J. Mod. Power Syst. Clean Energy 2017, 5, 211–219. [Google Scholar] [CrossRef]
- Lee, I. High-Impedance Fault Detection Using Third-Harmonic Current; Final Report. Technical Report; Hughes Aircraft Co.: Malibu, CA, USA, 1982. [Google Scholar]
- Emanuel, A.E.; Cyganski, D.; Orr, J.A.; Shiller, S.; Gulachenski, E.M. High impedance fault arcing on sandy soil in 15 kV distribution feeders: Contributions to the evaluation of the low frequency spectrum. IEEE Trans. Power Deliv. 1990, 5, 676–686. [Google Scholar] [CrossRef]
- Jeerings, D.I.; Linders, J.R. Unique aspects of distribution system harmonics due to high impedance ground faults. IEEE Trans. Power Deliv. 1990, 5, 1086–1094. [Google Scholar] [CrossRef]
- Jeerings, D.I.; Linders, J.R. A practical protective relay for down-conductor faults. IEEE Trans. Power Deliv. 1991, 6, 565–574. [Google Scholar] [CrossRef]
- Yu, D.C.; Khan, S.H. An adaptive high and low impedance fault detection method. IEEE Trans. Power Deliv. 1994, 9, 1812–1821. [Google Scholar] [CrossRef]
- Milioudis, A.N.; Andreou, G.T.; Labridis, D.P. Detection and Location of High Impedance Faults in Multiconductor Overhead Distribution Lines Using Power Line Communication Devices. IEEE Trans. Smart Grid 2015, 6, 894–902. [Google Scholar] [CrossRef]
- Mortazavi, S.H.; Moravej, Z.; Shahrtash, S.M. A Searching Based Method for Locating High Impedance Arcing Fault in Distribution Networks. IEEE Trans. Power Deliv. 2019, 34, 438–447. [Google Scholar] [CrossRef]
- Sedighi, A.R.; Haghifam, M.R.; Malik, O.P.; Ghassemian, M.H. High impedance fault detection based on wavelet transform and statistical pattern recognition. EEE Trans. Power Deliv. 2005, 20, 2414–2421. [Google Scholar] [CrossRef]
- Soheili, A.; Sadeh, J. Evidential reasoning based approach to high impedance fault detection in power distribution systems. IET Gener. Transm. Distrib. 2017, 11, 1325–1336. [Google Scholar] [CrossRef]
- Girgis, A.A.; Chang, W.; Makram, E.B. Analysis of high-impedance fault generated signals using a Kalman filtering approach. IEEE Trans. Power Deliv. 1990, 5, 1714–1724. [Google Scholar] [CrossRef]
- Chakraborty, S.; Das, S. Application of Smart Meters in High Impedance Fault Detection on Distribution Systems. IEEE Trans. Smart Grid 2019, 10, 3465–3473. [Google Scholar] [CrossRef]
- Xue, S.; Cheng, X.; Lv, Y. High Resistance Fault Location of Distribution Network Based on EEMD. In Proceedings of the 9th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2017; Volume 1, pp. 322–326. [Google Scholar]
- Yao, W.; Gao, X.; Wang, S.; Liu, Y. Distribution High Impedance Fault Detection Using the Fault Signal Reconstruction Method. In Proceedings of the IEEE 3rd Conference on Energy Internet and Energy System Integration, Changsha, China, 8–10 November 2019; pp. 2573–2577. [Google Scholar]
- Baqui, I.; Zamora, I.; Mazón, J.; Buigues, G. High impedance fault detection methodology using wavelet transform and artificial neural networks. Electr. Power Syst. Res. 2011, 81, 1325–1333. [Google Scholar] [CrossRef]
- Tonelli-Neto, M.S.; Decanini, J.G.M.S.; Lotufo, A.D.P.; Minussi, C.R. Fuzzy based methodologies comparison for high-impedance fault diagnosis in radial distribution feeders. Int. J. Electr. Power Energy Syst. 2017, 11, 1557–1565. [Google Scholar] [CrossRef]
- Moravej, Z.; Mortazavi, S.H.; Shahrtash, S.M. DT-CWT based event feature extraction for high impedance faults detection in distribution system. Int. Trans. Electr. Energy Syst. 2015, 25, 3288–3303. [Google Scholar] [CrossRef]
- Wang, S.; Dehghanian, P. On the Use of Artificial Intelligence for High Impedance Fault Detection and Electrical Safety. IEEE Trans. Ind. Appl. 2020, 56, 7208–7216. [Google Scholar] [CrossRef]
- Veerasamy, V.; Wahab, N.I.A.; Ramachandran, R.; Thirumeni, M.; Subramanian, C.; Othman, M.L.; Hizam, H. High-impedance fault detection in medium-voltage distribution network using computational intelligence-based classifiers. Neural Comput. Appl. 2019, 31, 9127–9143. [Google Scholar] [CrossRef]
- Sheng, Y.; Rovnyak, S.M. Decision tree-based methodology for high impedance fault detection. IEEE Trans. Power Deliv. 2004, 19, 533–536. [Google Scholar] [CrossRef]
- Veerasamy, V.; Wahab, N.I.A.; Othman, M.L.; Padmanaban, S.; Sekar, K.; Ramachandran, R.; Hizam, H.; Vinayagam, A.; Islam, M.Z. LSTM Recurrent Neural Network Classifier for High Impedance Fault Detection in Solar PV Integrated Power System. IEEE Access 2021, 9, 32672–32687. [Google Scholar] [CrossRef]
- L’Heureux, A.; Grolinger, K.; Elyamany, H.F.; Capretz, M.A.M. Machine Learning With Big Data: Challenges and Approaches. IEEE Access 2017, 5, 7776–7797. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Ghosh, A.; Grolinger, K. Edge-Cloud Computing for IoT Data Analytics: Embedding Intelligence in the Edge with Deep Learning. IEEE Trans. Ind. Inform. 2020. [Google Scholar] [CrossRef]
- Fan, C.; Xiao, F.; Zhao, Y.; Wang, J. Analytical investigation of autoencoder-based methods for unsupervised anomaly detection in building energy data. Appl. Energy 2018, 211, 1123–1135. [Google Scholar] [CrossRef]
- Araya, D.B.; Grolinger, K.; ElYamany, H.F.; Capretz, M.A.; Bitsuamlak, G. An ensemble learning framework for anomaly detection in building energy consumption. Energy Build. 2017, 144, 191–206. [Google Scholar] [CrossRef]
- Li, S.; He, H.; Li, J. Big data driven lithium-ion battery modeling method based on SDAE-ELM algorithm and data pre-processing technology. Appl. Energy 2019, 242, 1259–1273. [Google Scholar] [CrossRef]
- Masci, J.; Meier, U.; Cireşan, D.; Schmidhuber, J. Stacked convolutional auto-encoders for hierarchical feature extraction. In Proceedings of the International Conference on Artificial Neural Networks, Espoo, Finland, 14–17 June 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 52–59. [Google Scholar]
- Hossain, M.S.; Al-Hammadi, M.; Muhammad, G. Automatic Fruit Classification Using Deep Learning for Industrial Applications. IEEE Trans. Ind. Inform. 2019, 15, 1027–1034. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-Time Motor Fault Detection by 1-D Convolutional Neural Networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Wang, K.; Qi, X.; Liu, H. A comparison of day-ahead photovoltaic power forecasting models based on deep learning neural network. Appl. Energy 2019, 251, 113315. [Google Scholar] [CrossRef]
- Gholamiangonabadi, D.; Kiselov, N.; Grolinger, K. Deep Neural Networks for Human Activity Recognition With Wearable Sensors: Leave-One-Subject-Out Cross-Validation for Model Selection. IEEE Access 2020, 8, 133982–133994. [Google Scholar] [CrossRef]
- Chi, C.Y.; Feng, C.C.; Chen, C.H.; Chen, C.Y. Blind Equalization and System Identification: Batch Processing Algorithms, Performance and Applications; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Kersting, W.H. Radial distribution test feeders. IEEE Trans. Power Syst. 1991, 6, 975–985. [Google Scholar] [CrossRef]
- Soheili, A.; Sadeh, J.; Bakhshi, R. Modified FFT based high impedance fault detection technique considering distribution non-linear loads: Simulation and experimental data analysis. Int. J. Electr. Power Energy Syst. 2018, 94, 124–140. [Google Scholar] [CrossRef]
- Kavi, M.; Mishra, Y.; Vilathgamuwa, M.D. High-impedance fault detection and classification in power system distribution networks using morphological fault detector algorithm. IET Gener. Transm. Distrib. 2018, 12, 3699–3710. [Google Scholar] [CrossRef]
- Ghaderi, A.; Mohammadpour, H.A.; Ginn, H.L.; Shin, Y. High-Impedance Fault Detection in the Distribution Network Using the Time-Frequency-Based Algorithm. IEEE Trans. Power Deliv. 2015, 30, 1260–1268. [Google Scholar] [CrossRef]




















| Surfaces | R1 () | R2 () | V1 (V) | V2 (V) |
|---|---|---|---|---|
| Wet Sand | 138 ± 10% | 138 ± 10% | 900 ± 150 | 750 ± 150 |
| Tree Branch | 125 ± 20% | 125 ± 20% | 1000 ± 100 | 500 ± 50 |
| Dry Sod | 98 ± 10% | 98 ± 10% | 1175 ± 175 | 1000 ± 175 |
| Dry Grass | 70 ± 10% | 70 ± 10% | 1400 ± 200 | 1200 ± 200 |
| Wet Sod | 43 ± 10% | 43 ± 10% | 1550 ± 250 | 1300 ± 250 |
| Wet Grass | 33 ± 10% | 33 ± 10% | 1750 ± 350 | 1400 ± 350 |
| Rein. Concrete | 23 ± 10% | 23 ± 10% | 2000 ± 500 | 1500 ± 500 |
| Model | Acc | Saf | Sen | Sec | Dep |
|---|---|---|---|---|---|
| Proposed CAE-HIFD | 100 | 100 | 100 | 100 | 100 |
| CAE with CC, K | 51.19 | 100 | 51.10 | 0.37 | 100 |
| CAE with K, Diff | 48.29 | 4.76 | 50.10 | 0.40 | 92.67 |
| CAE with CC, Diff | 96.38 | 100 | 93.31 | 92.70 | 100 |
| CAE with CC | 51.10 | 100 | 50.64 | 1.84 | 100 |
| CAE with Diff | 48.9 | 37.93 | 49.51 | 4.04 | 93.43 |
| CAE with K | 89.64 | 96.67 | 84.16 | 82.77 | 96.35 |
| Model | Acc | Saf | Sen | Sec | Dep |
|---|---|---|---|---|---|
| Other Approaches-Supervised | |||||
| DWT+SVM [6] | 97.97 | 100 | 97.78 | 78.99 | 100 |
| DWT+ANN [21] | 97.72 | 100 | 97.55 | 76.47 | 100 |
| Variants of our approach-Unsupervised | |||||
| Train on non-faults | |||||
| GRU-AE | 99.92 | 100 | 96.92 | 99.92 | 100 |
| Proposed CAE-HIFD | 100 | 100 | 100 | 100 | 100 |
| Train on faults | |||||
| GRU-AE | 34.61 | 32.24 | 83.22 | 97.52 | 5.66 |
| Proposed CAE-HIFD | 100 | 100 | 100 | 100 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rai, K.; Hojatpanah, F.; Badrkhani Ajaei, F.; Grolinger, K. Deep Learning for High-Impedance Fault Detection: Convolutional Autoencoders. Energies 2021, 14, 3623. https://doi.org/10.3390/en14123623
Rai K, Hojatpanah F, Badrkhani Ajaei F, Grolinger K. Deep Learning for High-Impedance Fault Detection: Convolutional Autoencoders. Energies. 2021; 14(12):3623. https://doi.org/10.3390/en14123623
Chicago/Turabian StyleRai, Khushwant, Farnam Hojatpanah, Firouz Badrkhani Ajaei, and Katarina Grolinger. 2021. "Deep Learning for High-Impedance Fault Detection: Convolutional Autoencoders" Energies 14, no. 12: 3623. https://doi.org/10.3390/en14123623
APA StyleRai, K., Hojatpanah, F., Badrkhani Ajaei, F., & Grolinger, K. (2021). Deep Learning for High-Impedance Fault Detection: Convolutional Autoencoders. Energies, 14(12), 3623. https://doi.org/10.3390/en14123623