6.3. Induction Motors Performance Evaluation
Figure 9a–c shows the measured TPA, efficiency, and power factor results. The efficiency was indirectly determined according to the IEC 60034-2-1 standard [
34,
35] with the standard 2-1-1B test method by the summation of separate losses at thirteen load points between unloaded and 120% load of the rated torque for a nominal frequency of 50 Hz. The additional load losses,
, were measured starting from the residual losses,
[
35,
36], which were determined for each load point by subtracting from the input power,
, the output power,
, the constant losses,
, the rotor cage winding losses,
, the stator primary winding losses,
, and the stator auxiliary winding losses,
[
37]. The residual losses for the three-phase SCIM with auxiliary capacitive winding were determined using Equation (16):
The constant losses, which were obtained for various terminal voltages between
and
, were calculated using Equation (17) [
37]:
where
denotes the unloaded supply voltage;
denotes the nominal voltage;
denotes the core loss; and
denotes the rotational loss. The latter mainly includes the bearing friction loss and windage loss. For normal-, small-, and medium-sized SCIMs, rotational loss is generally calculated using Equation (18) [
38]:
The rotational loss,
, was corrected for by considering the operating point via slip
and is determined using Equation (19) [
37]:
where
denotes the corrected rotational loss operating at slip
. To reduce the effects of measurement errors, the standard establishes a linear regression analysis of residual losses, expressed as a function of the square of load torque according to the relationship expressed in Equation (20) [
36]:
where
T denotes the torque measured in the variable load test;
A denotes the slope of the line of best fit to the test points and
B denotes the intercept at zero torque [
34,
35,
36].
A and
B are obtained by considering thirteen load points and using the relations in (21) and (22) respectively. The additional load losses
for each of the load points can be determined by using (23) [
34,
35,
36].
where
denotes the number of load points. The electromagnetic power is transmitted to the rotor by the stator through the law of electromagnetic induction. Consequently, the rotor copper losses are calculated using Equation (24):
The total losses are calculated using Equation (25), and the efficiency at each of the load points is determined as in Equation (26):
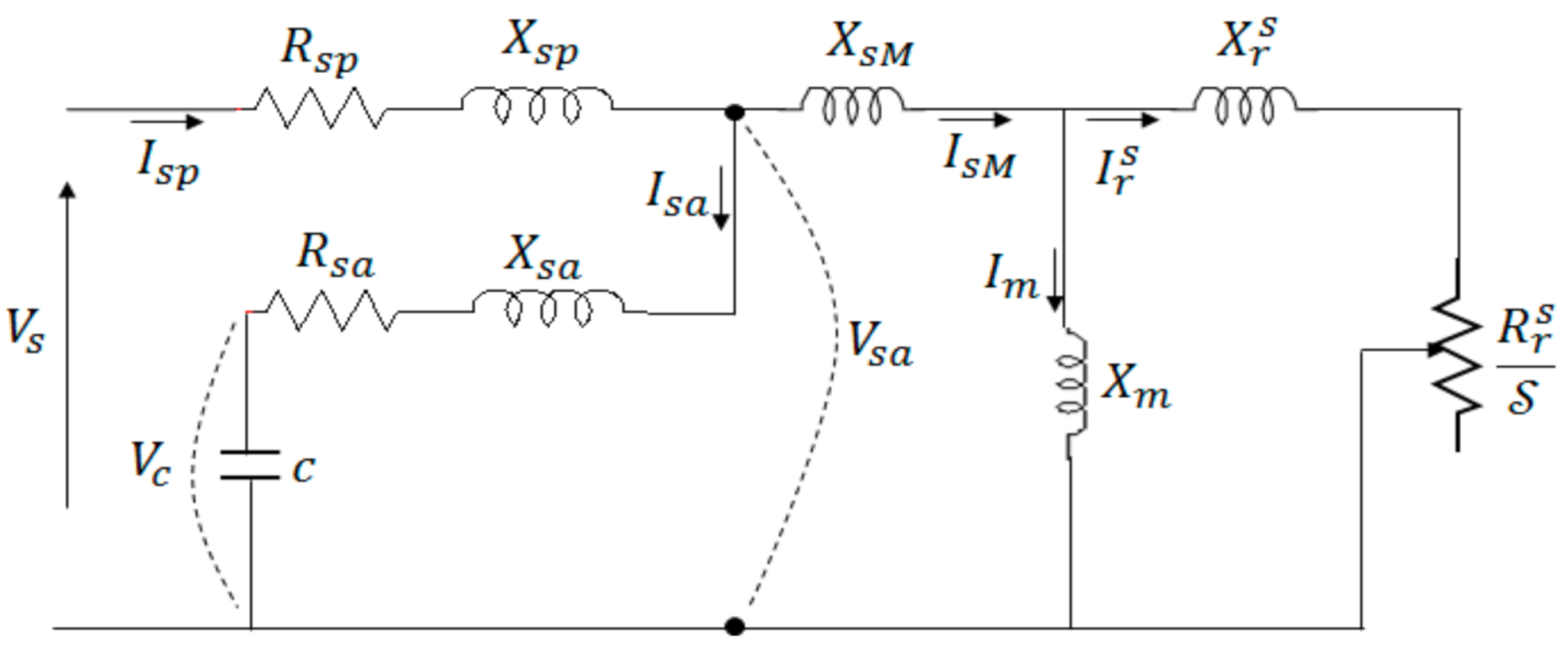
Table 9 shows a comparison of the torque per ampere (TPA) as per the FEA and experimental results between the optimized and unoptimized SCIMs. TPA enhancement is based on the concept that necessitates the reduction of stator current to produce the same amount of torque required by the induction motor. The stator current was reduced here by exciting the auxiliary winding with a reactive current. Furthermore, a high auxiliary winding DC resistance contributes to additional stator copper losses
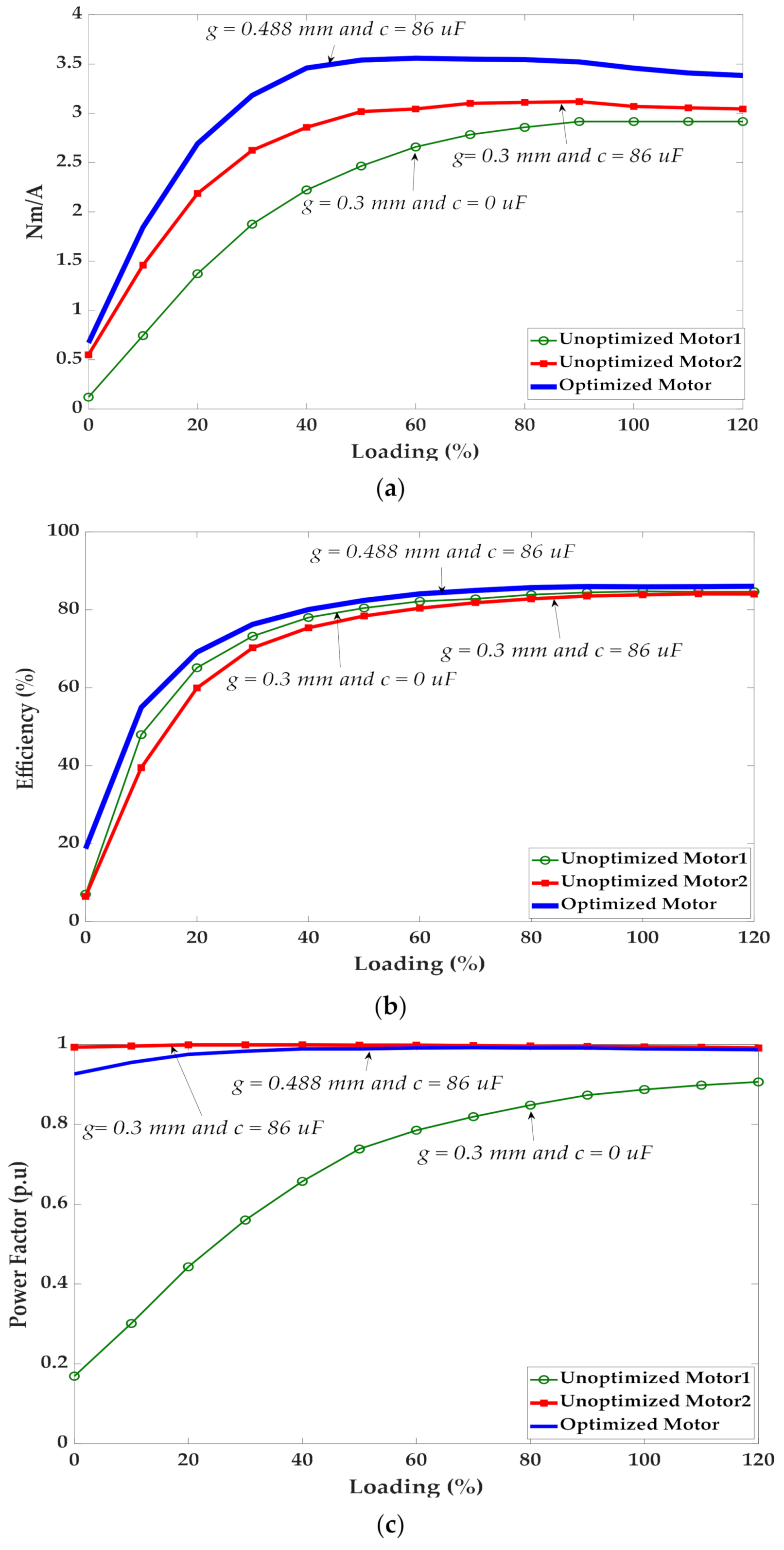
, thus dropping the efficiency. To address the problem, the concept of a large air gap was introduced in order to decrease the iron losses and improve the efficiency. A large air gap decreases the torque and the power factor. An optimal air gap length (OAL) and capacitive auxiliary stator winding (OCASW) configuration is required to obtain an enhanced TPA without compromising the power factor and efficiency. From the GA results, the OAL was 0.488 mm and the optimal capacitance value was 86 μF. The experimental results shown in
Figure 9a–c provide a comparison between the optimized motor (
and
), unoptimized motor 1 (
and
), and unoptimized motor 2 (
and
). The results in
Figure 9a provide evidence that the TPA was significantly enhanced with an OAL of 0.488 mm and optimal capacitance value of 86 μF. Unoptimized motor 2 produced a high TPA when compared to unoptimized motor 1; however, the experimental results in
Figure 9b show that unoptimized motor 2 experienced a slight drop in efficiency when a capacitor with a capacitance value of 86 μF was connected to the auxiliary winding. The drop in efficiency was due to copper losses
in the auxiliary winding and a slight increase in iron loss.
With an optimal air gap of 0.448 mm (optimized motor), the increase in iron loss due to the presence of the 86 μF capacitor in the auxiliary winding was mitigated, thus maintaining high efficiency as seen in
Figure 9b.
Table 10 compares the additional load losses,
, the rotor copper losses,
, the corrected rotational losses,
, the iron losses,
, the copper losses in the primary winding,
, the copper losses in the auxiliary winding,
, and the efficiency,
, of all three motors at a nominal torque operating point. The optimized motor, unoptimized motor 1, and unoptimized motor 2 obtained full load efficiency values of 84.74%, 83.85%, and 85.87%, respectively. The optimal capacitance value of 86 μF enhanced the power factor in both unoptimized motor 2 and the optimized motor as demonstrated in
Figure 9c. The improvement of the power factor was more significant for unoptimized motor 2 than the optimized motor when operating below 40% of the full load.
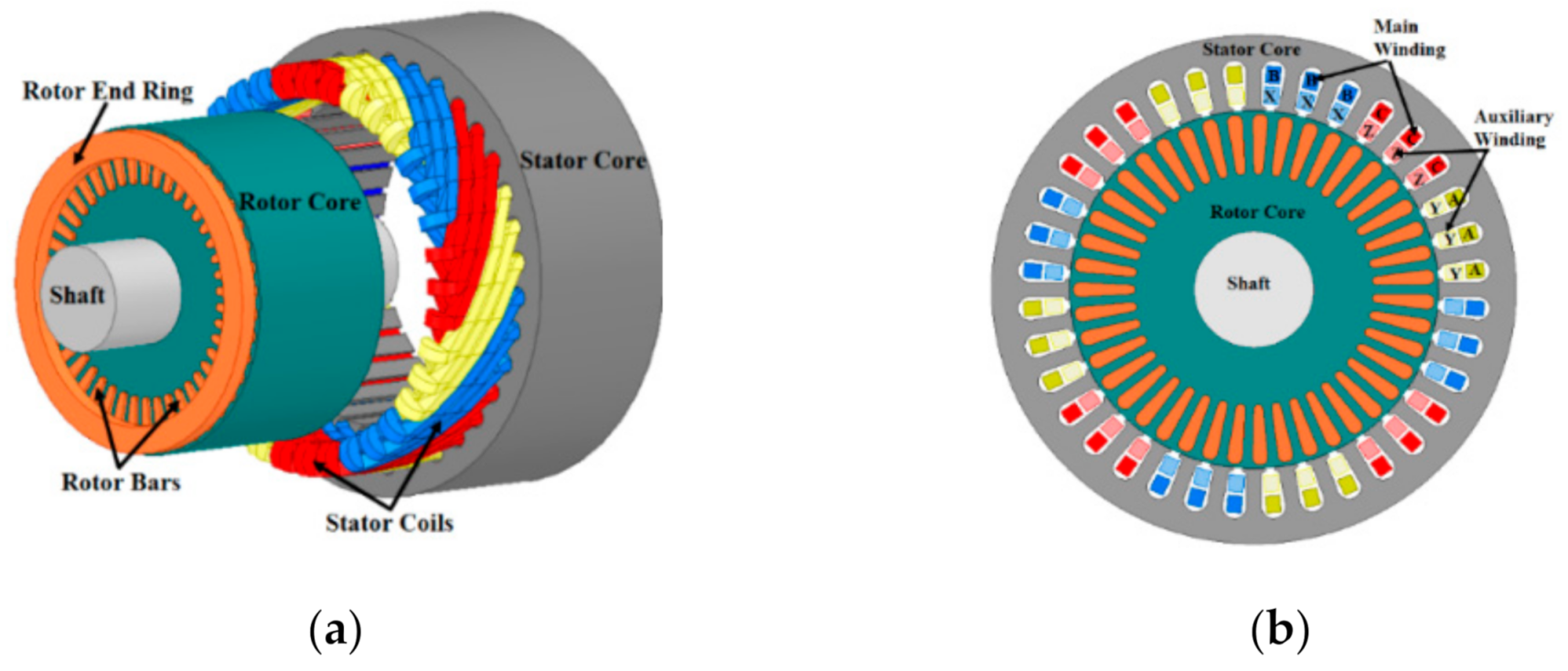
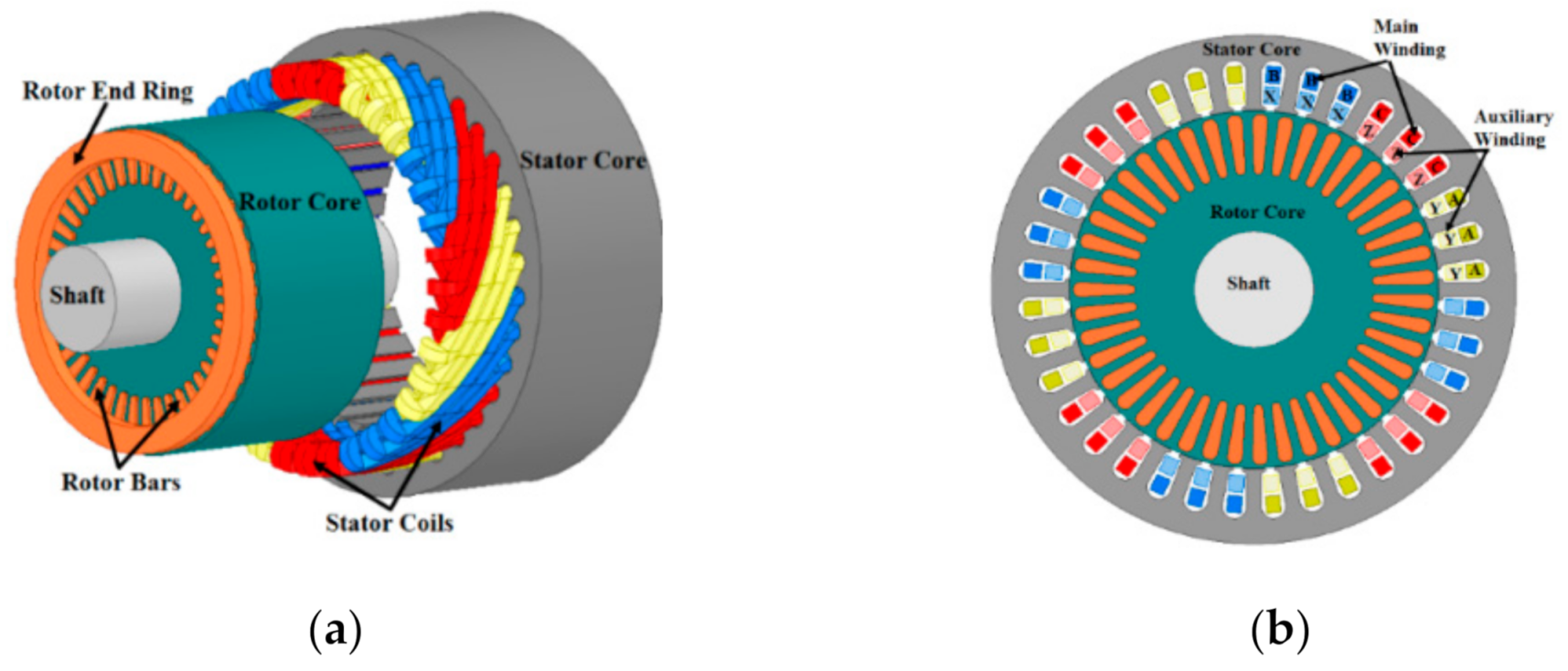
After modification of the stator winding from a single to dual configuration, slot filling factors of 33.08% and 9.33% were achieved for the main and auxiliary windings, respectively. There was a 50% drop in the slot filling factor as compared to the original SCIM. As a result, the iron losses in all three machines were high, as noted in
Table 10, and they approximately contributed to 38%, 40%, and 29% of the total losses, respectively. The typical iron loss share in conventional SCIMs is estimated to be 20% of the total loss on average [
39]. With the absence of the auxiliary winding, the increase in the slot area caused an increase in flux density around the slot, thus increasing iron loss. To address this problem, maximization of slot filling factor may be required through design optimization in cases where the stator winding of a conventional SCIM is modified from a single to dual configuration. On the other hand, the modification of the stator winding configuration to fit both main and auxiliary windings in the same slot may not be required when designing a SCIM with a dual stator winding configuration from scratch.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}