1. Introduction
Over the past decade, the emission limits set by the European Union for new passenger cars have become increasingly stringent [
1]. One effective way for vehicle manufacturers to lower their fleet emissions and comply with the European regulations is to produce battery electric vehicles (BEVs) [
2]. However, a major obstacle for BEVs remains their lower range compared to internal combustion engine vehicles (ICEVs) [
3]. For this reason, range is a crucial selling point for BEVs [
4,
5]. One strategy that can guarantee a certain target range is to reduce the vehicle’s consumption, which depends on external and internal resistances.
External resistances are associated with rolling, aerodynamics, climbing, and acceleration resistance ([
6] p. 137) [
7]. The former is caused by deformation of the tire during vehicle motion [
7] and can be described with the tire rolling coefficient f
RR, the mass of the vehicle m
veh, the gravitational acceleration g, and the road inclination angle α:
The aerodynamic resistance F
Aerodynamic is caused by air friction and pressure differences between the front and the rear of the vehicle [
8] (p. 14). It depends on the vehicle’s frontal area A
f, its drag coefficient c
d, its speed v
veh, and the air density ρ
air:
The acceleration resistance F
Acceleration is caused by the inertia of the vehicle and its rotating parts. This resistance is modeled based on the acceleration of the vehicle a
veh, its mass, and the rotational mass factor e
i [
9] (p. 10):
Finally, the slope resistance F
Slope is induced by gravity when the vehicle drives on a non-horizontal road. It depends on vehicle mass, gravitational acceleration, and road inclination angle α [
8] (p. 16).
The total external resistance is obtained by adding up rolling, drag, acceleration, and slope resistance. As shown in Equations (1)–(4), three out of four components of the external resistance are mass-dependent. In order for the vehicle to follow a defined speed profile, it has to overcome these.
Internal resistances describe losses within components caused by friction as well as the energies required for auxiliary units [
10] (p. 34). An example are gearbox losses, which are composed by gear, bearing, and load independent losses.
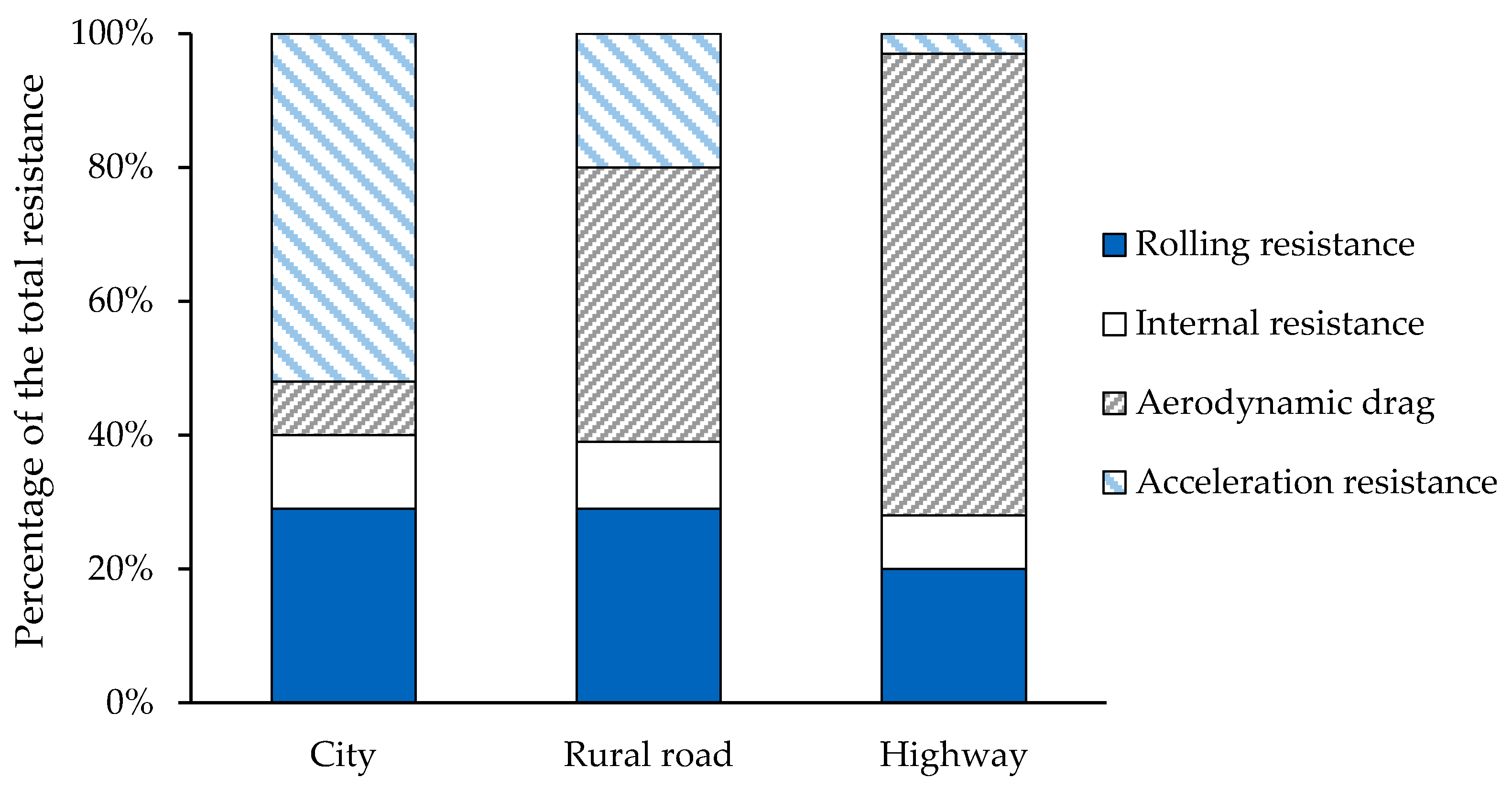
Figure 1 outlines the percentage contributions of internal and external resistances (the slope resistance is excluded) in three different scenarios: city, rural road, and highway. Mass-dependent resistances account for approximately 92% of the losses in the city scenario, 55% in the rural road scenario, and 30% in the highway scenario [
10] (p. 35).
Figure 1 and Equations (1)–(4) show the strong correlation between mass and energy consumption. Reducing vehicle mass is consequently an effective strategy for decreasing energy consumption and achieving the target range. Furthermore, the lower the vehicle’s consumption, the less battery energy is needed to attain the target range. This is significant for two reasons. First, a lower energy demand means lower battery costs. Since the role of the battery is a key element of the vehicle cost structure [
11], reducing its cost will have a significant impact on the total vehicle costs. Second, as the gravimetric energy density of lithium-ion batteries is lower than that of gasoline and diesel fuels [
12], a decrease of a few kWh can result in a considerable mass reduction [
13], leading to a further drop in energy consumption.
The high cost of lithium-ion batteries combined with their low gravimetric energy density make mass reduction strategies (lightweight measures) particularly attractive for BEVs. However, every lightweight measure also generates costs [
14] (p. 49). For example, vehicle mass can be reduced by investing in lighter (but also more expensive) materials for the body in white (BIW). Such a strategy is being pursued with the BMW i3, whose body is largely made of carbon fibers [
15].
Lightweight measures are therefore an important strategic choice during the early development of BEVs. In the best-case scenario, the investment required for a lightweight measure can be partially or even fully compensated by the reduction in battery energy (and thus the costs) it generates. To create such a scenario, we must define the circumstances under which a lightweight measure can compensate its costs, by answering the question: What is the lightweight potential of BEVs? The purpose of the present paper is to answer this question. However, before we can investigate the lightweight potential of BEVs, we first have to understand the influence that a lightweight measure has on the vehicle.
The paper is structured as follows: after explaining the importance of lightweight measures (
Section 1.1) the state of the art is evaluated (
Section 1.2) and the research gap identified (
Section 1.3). Based on the research gap, a tool to quantify the mass and lightweight potential of BEVs is presented (
Section 2).
Section 3 provides a validation of the presented tool using a dataset of existing BEVs. The approach is then applied in
Section 4 to quantify the lightweight potential of current BEVs.
Section 5 and
Section 6 close the paper with a discussion and outlook.
1.1. Primary and Secondary Mass Reduction in the Early Development Phase
To understand the impact of a lightweight measure on a vehicle, we first have to briefly explain the BEV development process. During the early development phase of a BEV, concept engineers compile a detailed portfolio of requirements for the vehicle. This includes design parameters such as acceleration time, maximum speed, and target range [
16]. In subsequent development steps, the vehicle components are detailed and sized according to the portfolio target values. This results in an initial dimensioning of the vehicle’s components and an estimation of its mass and costs.
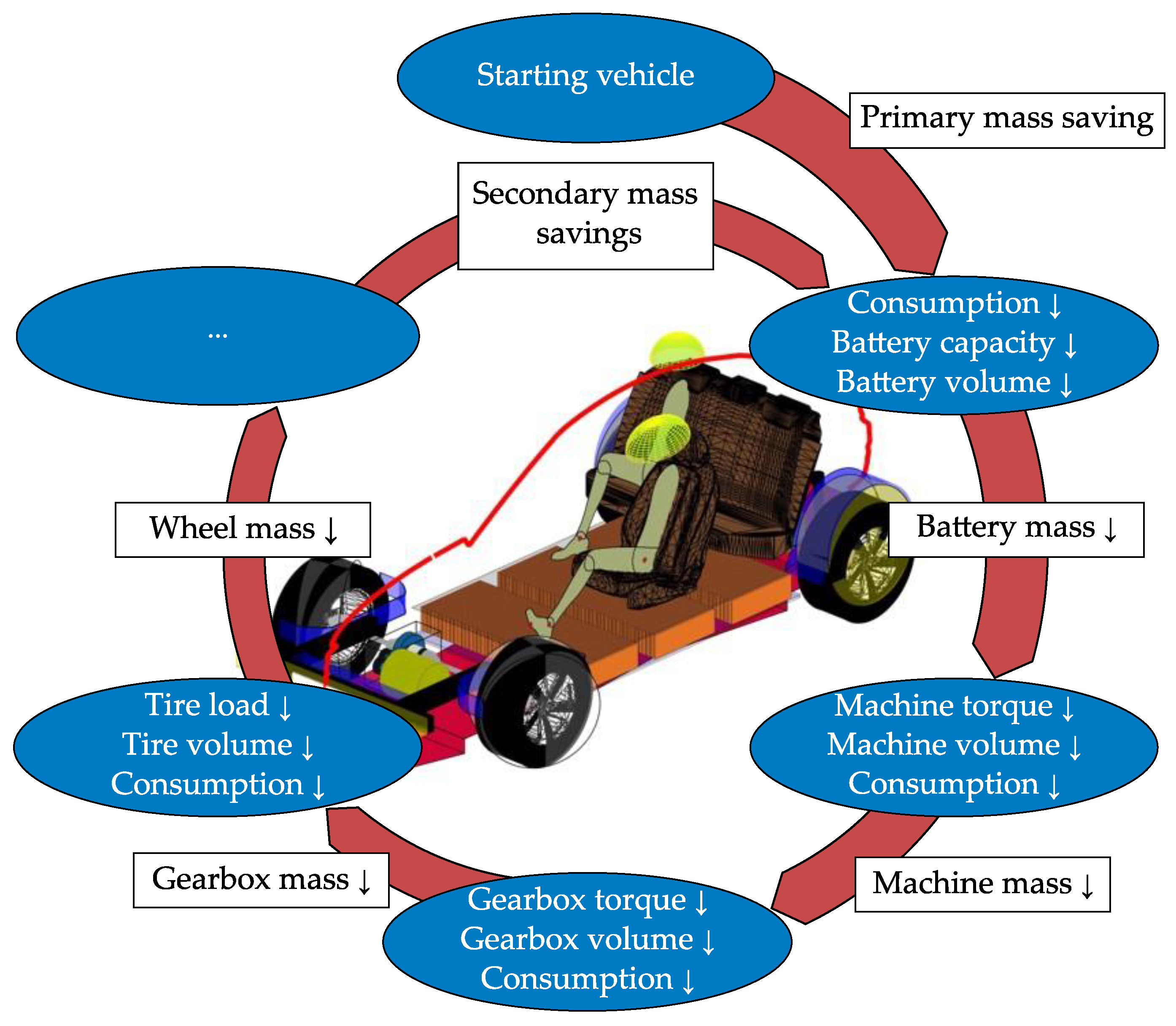
What will happen if a lightweight measure is applied at this stage of development? The lightweight measure will cause a reduction in vehicle mass, which we will define as a primary mass saving (PMS). This will cause consumption to decrease, setting a mass spiral in motion (
Figure 2).
Due to the resulting lower energy consumption, a smaller battery pack will now be sufficient to create the target range required in the vehicle portfolio. Electric machines and gearboxes can then also be downsized, as less torque is required to fulfill the required acceleration time and maximum speed. These adjustments are propagated to other mass-dependent components, such as the wheels, suspension system, and BIW. The mass savings induced by the spiral are referred to as secondary mass savings (SMSs). These SMSs can themselves trigger further SMSs (
Figure 2).
One way of quantifying the SMSs is with the secondary to primary ratio (SPR), which expresses the relationship between the SMSs and the PMS which induces them [
17] (pp. 9–10) according to Equation (5). For example, an SPR of 0.5 means that given a mass reduction of 100 kg, a secondary mass saving of 50 kg is possible.
For vehicles equipped with an electric powertrain, the SMSs induced by a lightweight measure further reduce the battery energy required, thus decreasing the vehicle’s production and development costs. In the case of ICEVs, this reduction is in the required tank capacity, which, however, has little impact on vehicle costs.
Figure 2.
A mass spiral showing the SMSs generated from a lightweight measure. Based on [
18].
Figure 2.
A mass spiral showing the SMSs generated from a lightweight measure. Based on [
18].
Therefore, to quantify the lightweight potential of BEVs, it is necessary to model the component masses (for assessing SPR and SMSs) and the correlation between mass and energy consumption (to estimate the savings in battery energy). The following section reviews the work of some authors who have attempted to address this problem.
1.2. Existing Methods of Modeling Lightweight Potential
In the early development phase, several researchers were concerned with the key role of mass reduction. To address the problem, parametric models were developed to simplify the problem of mass estimation (
Table 1).
Malen et al. [
19] divided the vehicle into 13 subsystems and assigned a secondary mass coefficient to each subsystem. These coefficients describe the incremental mass change in the corresponding subsystem for a unit change in gross vehicle mass and are determined by empirical analysis of a dataset of 32 ICEVs. The sum of the subsystem’s secondary mass coefficients yields the SPR. According to the authors, fuel and exhaust systems as well as electrical, cooling, and closure systems have low coefficients and hence experience little mass fluctuation. Malen et al. [
19] estimate an SPR of between 0.8 and 1.5 if all subsystems are resized. When the powertrain is not available for resizing, the SPR drops to a range between 0.4 and 0.5.
Gobbels et al. [
20] propose a method of quantifying SMSs in passenger cars. The vehicle components are modeled separately and organized into six subsystems (body, engine, transmission, suspensions, interior, and electronics). For the body and suspensions, the mass reduction potential is determined by finite element simulations. The engine and transmission subsystems are described by regression models, while the interior and electronics subsystems are regarded as mass-independent. The modeling is based on two reference vehicles, an Opel Corsa C and a Volkswagen Golf VI. The approach predicts an SPR of 0.30 for the Opel Corsa and 0.46 for the Volkswagen Golf.
Yanni et al. [
21] derive a linear regression model to estimate the vehicle mass based on its power and external dimensions. However, the authors did not consider BEVs, and the resulting estimation only includes SMSs that result from a change in the vehicle’s external dimensions.
Alonso et al. [
22] follow the same approach defined by Malen et al. [
19] and develop an empirical method to determine how the different subsystems are affected by a change in the overall vehicle mass. The modeling follows an empirical approach, based on a dataset of 77 ICEVs. The authors do not consider BEVs, though, and focus exclusively on combustion engines, estimating an SPR of 0.49.
Fuchs et al. [
17,
23] divide the vehicle into eight subsystems to create a parametric mass model. Each subsystem is further divided into subcomponents, which are modeled with empirical and semi-physical models. A dataset of 24 vehicles (including BEVs and ICEVs) is used to derive the empirical models. The authors couple the parametric mass model with an energy consumption simulation, which is used to size the powertrain and quantify the vehicle consumption. The research done by Fuchs et al. [
17] highlights the large impact of target range and battery energy on the mass of BEVs. In a simulation of a two-seater BEV with a range of 150 km, the authors predict an SPR of between 0.32 and 0.45.
Wiedemann [
24] develops a parametric model for BEVs which also includes a parametric mass calculation. He estimates a basic vehicle mass using the model of Yanni et al. [
21]. The mass of the electric powertrain is modeled by adding the contributions of battery, electric machine, power electronics, and gearbox, which are all estimated using empirical models. As with Fuchs, Wiedemann also implements an energy consumption simulation to model the interdependencies between vehicle mass and consumption. Wiedemann’s model can estimate the SMSs, but only on the powertrain components.
Mau et al. [
25] divide the vehicle into seven subsystems, and model each subsystem empirically. For example, powertrain mass is calculated based on engine torque, gearbox type, and drive configuration (front/rear/all-wheel drive). However, the model does not consider BEVs or SMSs.
Finally, Felgenhauer et al. [
26] develop an empirical regression model based on the methods of Mau and Yanni [
21,
25]. The model includes BEVs but can only estimate SMSs resulting from a change in the vehicle’s external dimensions.
1.3. Research Gap
Among the authors listed in
Table 1, only Malen et al. [
19], Gobbels et al. [
20], Fuchs [
17], and Alonso et al. [
22] consider all mass-dependent vehicle subsystems when modeling the SMSs. Fuchs is the only author to include BEVs in an energy consumption simulation.
Apart from the fact that the empirical data employed by Fuchs is outdated (the database he uses includes vehicles built before 2013), another disadvantage (which is true of all approaches in
Table 1) is that the author does not model the vehicle package but focuses on its mass. Transferred to a practical example, Fuchs’ parametric model is able to quantify the number of kWh the battery is required to store to reach a certain range but it cannot estimate whether the simulated vehicle can accommodate this energy. This is particularly critical since the lightweight potential derived might be calculated on the basis of vehicles that are not feasible in the first place.
To address these issues, the parametric mass model presented in this paper estimates the mass of BEVs using an approach similar to that of Fuchs [
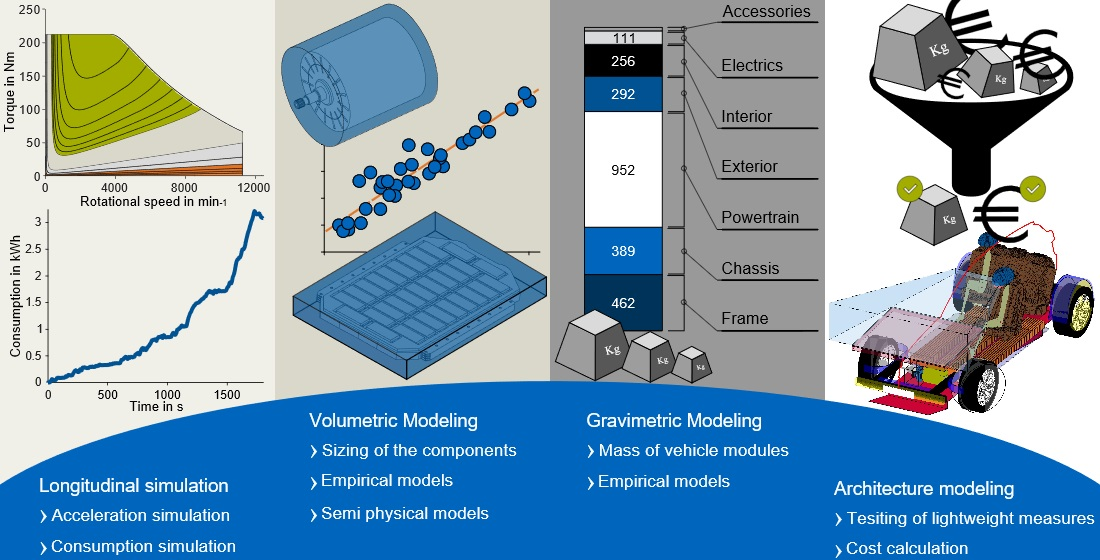
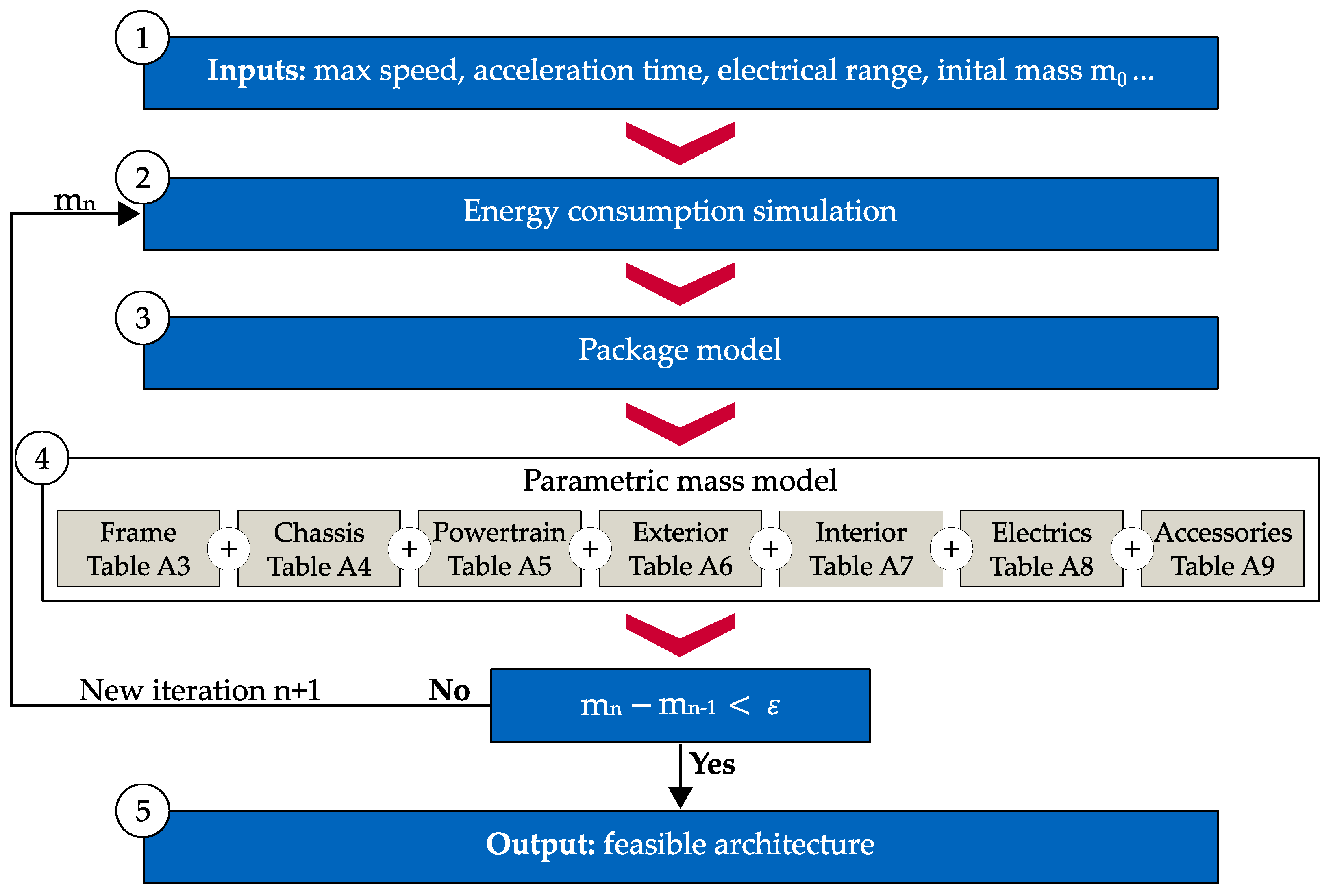
17] but employing an up-to-date vehicle dataset. Moreover, the model is encapsulated by a vehicle architecture tool that includes an energy consumption simulation and a package model. The former calculates the energy consumption and estimates the battery energy requirements depending on the vehicle mass and target range. The latter sizes and positions the components and checks the feasibility of the vehicle. This ensures that the simulated vehicle is feasible in terms of energy consumption, mass, and package. All the parts of the vehicle architecture tool (energy consumption, parametric mass model, and package model) are implemented in MATLAB.
3. Evaluation
This section presents an assessment of the accuracy of the parametric mass model. For this purpose, an evaluation dataset is created from 16 BEVs using A2mac1 (
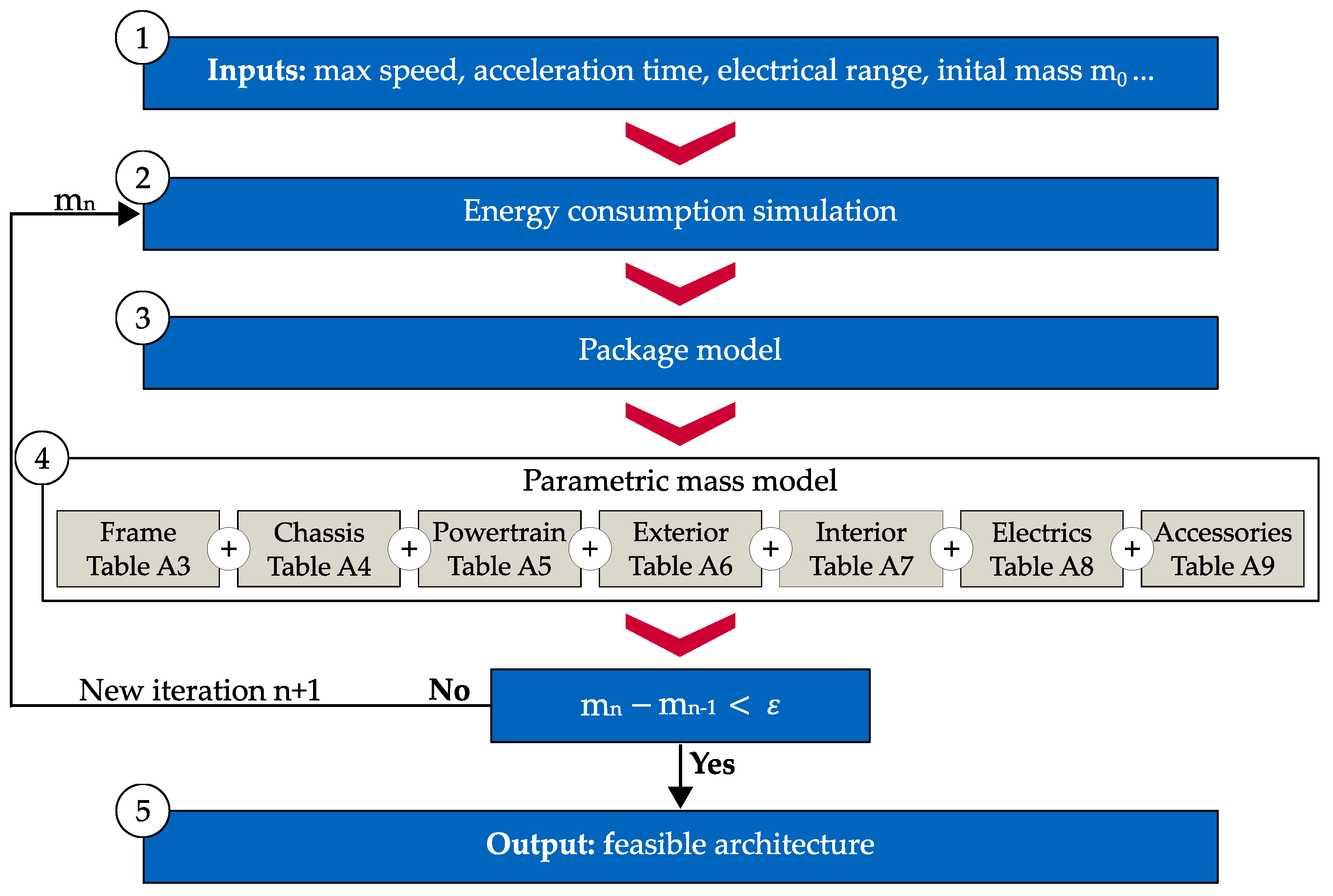
Table 2). To assess parametric mass model accuracy alone, the vehicle package is not simulated and the energy consumption simulation is not applied (
Figure 3). Therefore, the mass estimation presented in this section relies solely on the set of empirical models listed in
Table A3,
Table A4,
Table A5,
Table A6,
Table A7,
Table A8 and
Table A9. Nevertheless, since the results of package modeling and energy consumption simulation are also required for mass modeling, we must collect further inputs to enable a standalone run of the parametric mass model. For example, the mass of the electric machine (
Table A5) is calculated from its maximum torque, which we collect from the ADAC database [
36].
A further required input is vehicle gross mass m
veh, gross, which is needed to calculate m
BIW (
Table A3) as well as several subsystems of the chassis (
Table A4). The ADAC database [
36] also lists the gross mass m
veh, gross of every documented vehicle. To do this, we link each of the A2mac1 vehicles listed in
Table 2, with the corresponding model series in ADAC and retrieve the gross mass of the heaviest model variant. Some vehicles, such as the Tesla Model 3 Long Range RWD, are not available in Europe and not documented in the ADAC database. In these cases, we retrieve the m
veh, gross from the manufacturer sites.
The BMW i3 120 Ah RE is a special case due to its range extender. With this vehicle, it is not possible to estimate the mass of the combustion engine, since internal combustion powertrains are not considered in the parametric mass model. Therefore, we simulate the vehicle as if it was built without the range extender.
Once the required inputs are collected, the vehicles in
Table 2 are simulated and the mass of the seven modules estimated. For each simulated vehicle, we can then retrieve the real module masses from the A2mac1 database. Again, in the case of the BMW i3, we subtract the contributions of the combustion powertrain from the real powertrain mass listed in A2mac1, since we cannot simulate this subsystem.
Once the simulated and real module masses are available, we assess the correctness of the model using mean absolute error (MAE) and normalized mean absolute error (nMAE).
The resulting MAE and nMAE are shown in
Table 3 while
Figure 5 depicts the deviation (in kg) between calculated and real modules masses. The powertrain module has the highest MAE, and the mean deviation between calculated and real powertrain masses is equal to 37 kg. This is because in most vehicles it is the heaviest module. For example, in BEVs such as the Audi e-tron [
37] or the Opel Ampera-e [
38], the battery accounts for more than 25% of the empty vehicle mass.
The powertrain of the Mercedes EQC has the highest deviation (red cross at −144 kg,
Figure 5). Nevertheless, this deviation is not an error of the model, but is rather caused by the unconventional design of the battery. The EQC has massive battery housing with a series of internal side reinforcements [
39], which lead to an above-average battery mass. Further inaccuracies occur with Tesla vehicles, whose electric machines have an above-average torque-to-mass ratio, which results in overestimation of these components.
With the other modules, the nMAE is usually between 5% and 8%. The electrics and accessories modules have higher values (15.9% and 28.4%, respectively). Nevertheless, these modules are lighter than the others, which means that the absolute error is not particularly high (compare the MAEs in
Table 3 and the boxplots in
Figure 5).
Overall the median of the absolute deviation is always close to 0 kg (
Figure 5) which denotes that there is no tendency to over- or underestimate any of the seven modules.
Finally, for each vehicle in
Table 2 the calculated empty vehicle mass (derived by totaling the contributions of the calculated modules) is compared with the real mass (
Figure 6). The nMAE of the empty vehicle mass estimation shown in
Figure 6 is 2.9%. This corresponds to a mean error of 53.1 kg for the evaluation dataset. This evaluation step confirms that, despite the limited amount of inputs, the mass estimation is still precise.
In the following section, the parametric mass model is applied in an assessment of the lightweight potential of current BEVs.
4. Lightweight Potential Assessment
To assess the lightweight potential, we define four reference vehicles (RVs) to be used in a parametric study (
Table 4). The RVs come from different segments and have differing cells, topologies, and powertrain requirements.
The RV-A is a hatchback and has the same external dimensions as a BMW i3. It is fitted with a permanent magnet synchronous machine (PMSM) on its rear axle, while its battery (composed of prismatic cells) yields an electric range of 280 km. Like the BMW i3, the RV-A has a light BIW, which is assumed to be made entirely of aluminum (since carbon-fiber BIWs are not considered in the parametric mass model). Due to its aluminum frame and the small external dimensions, the RV-A is the lightest of the reference vehicles.
The RV-B is slightly larger than the RV-A and is derived from the VW ID.3. The battery consists of pouch cells and provides an electric range of 420 km. Machine topology and body type are the same as for the RV-A, but the RV-B has a lower drag coefficient of 0.26, like the VW ID.3 [
40].
Table 4.
Selected key characteristics of the RVs’ portfolios.
The RV-C is a sedan car, similar to the Tesla Model 3 Standard Range. It has a PMSM on the rear axle, and its battery is composed of cylindrical cells. The vehicle has demanding powertrain requirements (low acceleration time and high maximum speed) and a low drag coefficient. Although the RV-C is larger than the RV-B, it has a lower range requirement and lower consumption (also due to its improved aerodynamics). This results in a similar mass to the RV-B, despite the bigger dimensions.
Finally, the RV-D is similar to an Audi e-tron. It has an all-wheel-drive topology with a PMSM on each axle. While all the other vehicles have a rectangular battery installed beneath the passenger compartment, the RV-D has an additional level of cell modules underneath the second row of seats. This solution enables it to attain an electric range of 400 km, despite its large dimensions, high drag resistance, and mass.
The RVs are simulated with the vehicle architecture tool. The tool confirms the feasibility of all the RVs and yields the vehicle empty mass mveh,empty base, which represents the mass of the vehicle when no lightweight measures are applied.
To study the impact of lightweight measures on the RVs, two mass savings (indicated as m
LW) of 50 kg and 100 kg are introduced and the RVs simulated again. Since the m
LW act like a PMS, they lead to further savings, according to the mass spiral shown in
Figure 2. Despite the mass reduction, the RV portfolios (target range, acceleration time, maximum speed,
Table 4) remain unchanged.
Table 5 shows the impact of m
LW on energy consumption. The value listed at m
LW = 0 kg corresponds to the consumption of the vehicle without lightweight measures. The values listed at m
LW = 50 kg and m
LW = 100 kg represent the resulting energy consumption after the lightweight measure is applied and the SMSs calculated. The lightweight measure and its induced SMSs result in the RVs becoming lighter, which leads to a reduction in their energy consumption. The reduction in energy consumption depends on the selected test procedure for the target range definition. In the scope of this paper, we refer to the WLTP since it is the adopted procedure for type approval of light duty vehicles in Europe.
As the energy consumption decreases, less battery energy is needed to achieve the target range given in
Table 4. For a 50 kg mass saving, the battery energy can be reduced by up to 1.84 kWh, while for 100 kg, the figure is between 2.33 kWh and 3.27 kWh. Due to the lower energy requirement, the battery can be downsized, which leads to mass savings in the powertrain and other module. These mass reductions also lower the machine power required, since with a lighter vehicle, less machine torque is needed to achieve the acceleration time.
Table 5 also shows a breakdown of the SMSs for chassis, frame, and powertrain. As it can be seen, the SMS are not continuous. For example, the RV-D has a lower SMS for the chassis than the other vehicles. This is due to the fact that despite the lightweight measure, the RV-D is still too heavy to reduce its wheel size. On the other hand all the other RVs can reduce their tire widths as a consequence of the lightweight measure thus generating higher SMS on the chassis.
The powertrain module always generates the highest SMSs. Finally, by adding the contributions of the three modules, it is possible to derive both the total SMSs induced by the mLW and, in turn, the SPR. The SPR (regardless of the RVs and the mLW) is within the range 0.42 to 0.50. This means that, on average, for each kilogram saved in the vehicle, a further saving of between 0.42 kg and 0.50 kg can be obtained on the basis of the SMSs.
Once the SPR and SMSs have been calculated, the lightweight potential of the RVs can be assessed. To do this, we use the cost data presented by König et al. [
43]. First, based on the battery energy saved, we derive the saved battery cost by assuming an average cost at the pack level of 200 €/kWh for the year 2020 [
43]. Furthermore, we assume production costs for the frame and chassis (material + labor + depreciation) of 1.3 €/kg for steel and 5.3 €/kg for aluminum. The PMSM costs are estimated at 10 €/kW. The cost savings are shown at the bottom of
Table 5. We would like to stress that the values given are production costs, which normally account for 60% of the selling price, excluding taxes [
43]. Furthermore, besides the given production cost savings, the customer also benefits from lightweight measures by way of the vehicle’s reduced energy consumption. As electricity prices vary significantly by country, we do not calculate these costs.
An assessment of the lightweight potential yields a range of between 6.9 €/kg and 9.3 €/kg. This means that, regardless of the RVs, if the costs of a lightweight measure are below 6.9 €/kg, they will be compensated by the induced power and energy saving. On the other hand, lightweight measures above 9.3 €/kg are not balanced for any of the RVs. Therefore, although they still result in a reduction in vehicle energy consumption, this will be accompanied by an increase in production costs.
The parametric study highlights that, in the case of BEVs, besides the benefits of reduced energy consumption, lightweight measures can also induce a significant monetary saving. Since the values shown in
Table 5 are calculated for a single vehicle, high production volumes can induce effects of scale, thus amplifying the savings in production costs.
5. Discussion
After illustrating the potential of mass savings in the vehicle development process (
Section 1), we present a tool and a parametric mass model capable of estimating the lightweight potential of BEVs (
Section 2).
Section 3 then presents an evaluation of the parametric mass model, which shows a percentual error of 2.9% (corresponding to approximately 53 kg). These deviations are mostly caused by the limited amount of modeling parameters. The choice of the modeling parameter set is the result of a tradeoff between modeling precision and usability of the tool during the early development design. Increasing the number of parameters would lead to higher accuracies, but would also hinder the usage of the tool for the early development design.
Regarding the vehicle interiors and exteriors, inaccuracies are mostly caused by the fact that their masses do not exclusively depend on the vehicle dimensions, but also on the model variant and optional. The available optional features, in turn, vary between manufacturers, which hinders the empirical modeling of this feature.
Inaccuracies are still present in the chassis because the subsystems of this module are sometimes built into different model series. This complicates the modeling since it is not always possible to precisely identify the model (and therefore the gross mass) that has been used for sizing the chassis subsystems. Regarding the powertrain, distinguishing between machine technologies (PMSM and IM) improved the results. Nevertheless, the number of machines available on the market is still low and displays a high variability between manufacturers. For a more precise estimation, it is possible to use sophisticated machine design tools such as [
44]. However, such solutions require a higher number of input parameters, which are often not available in the early development phase.
Breaking the battery down into housing, module, and electrics components also improves the model accuracy, although deviations can still be observed, mostly in the battery housing. Finally, inaccuracies in the empty mass estimation are also caused by the fact that some vehicles are simply designed better than others and act therefore as outliners.
Following the mass model evaluation, we assess the lightweight potential of four RVs (
Section 4). It is not possible to define an exact SPR but only a range, since there are components in the mass model which cause discontinuities. One example are the tires: as the vehicle mass decreases, the tire load and, in turn, the required tire volume also decreases. However, there are only a finite number of compatible tires, meaning that the SMSs caused by the tires are stepwise and not continuous [
13].
6. Conclusions and Outlook
The parametric study yields an SPR between 0.42 and 0.50. Since the RVs cover different vehicle segments and have different portfolios, we assume that the derived SPR range can be generalized onto the majority of BEVs. Furthermore, since the gravimetric and volumetric energy density of lithium-ion batteries is expected to increase constantly in the coming years [
43], this will lead to a decrease in SMSs caused by the battery and, in turn, of the SPR. Therefore, when quantifying lightweight potential, it is also necessary to carefully determine the year for which the as yet undeveloped vehicle is planned and choose the energy density accordingly.
A lightweight potential of between 6.9 €/kg and 9.3 €/kg is derived from the calculated SMSs and SPR. Again, it is possible to define a range (and not an exact value) for the lightweight potential. Nevertheless, the range can be applied to quantifying the suitability of lightweight measures during the vehicle development process. In
Table 5, we also list the corresponding mass, power, and energy savings. Therefore, if more precise cost data is available, the lightweight potential can be recalculated using the data in
Table 5.
The lightweight potential range given in this paper is only valid if every module and component is available for resizing. Since the tool is employable in the early development phase, there is still great design freedom, and resizing and adjustments are not as cost-intensive as in the following development phases. Nevertheless, this design freedom could be limited already in the early development if the vehicle has to be built on a preexisting platform (with an already given set of possible electric machines and cell sizes).
In conclusion, the method presented here is capable of estimating both SMSs and lightweight potential for BEVs. This approach can support manufacturers’ efforts to quantify lightweight measures and assist their decision-making in the early stages of the development process. In future publications, we will apply the presented tool to test the influence of other variables (such as acceleration time, drag coefficient, etc.) on vehicle energy consumption.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}