
Optimization Control Strategy for Large Doubly-Fed Induction Generator Wind Farm Based on Grouped Wind Turbine

Abstract
:1. Introduction
2. Losses Model of the Wind Farm
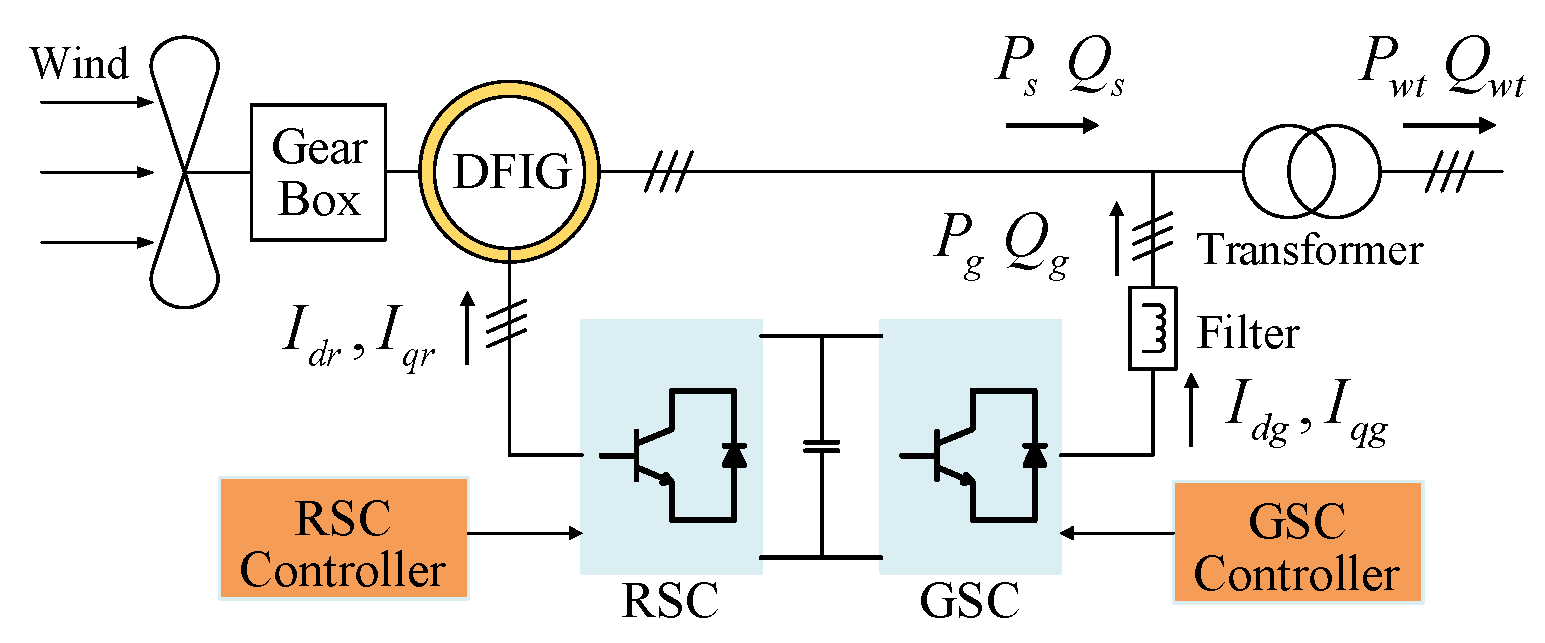
2.1. Losses Model of the DFIG
2.2. Losses Model of Transmission Network
3. Grouped Optimization Control Strategy
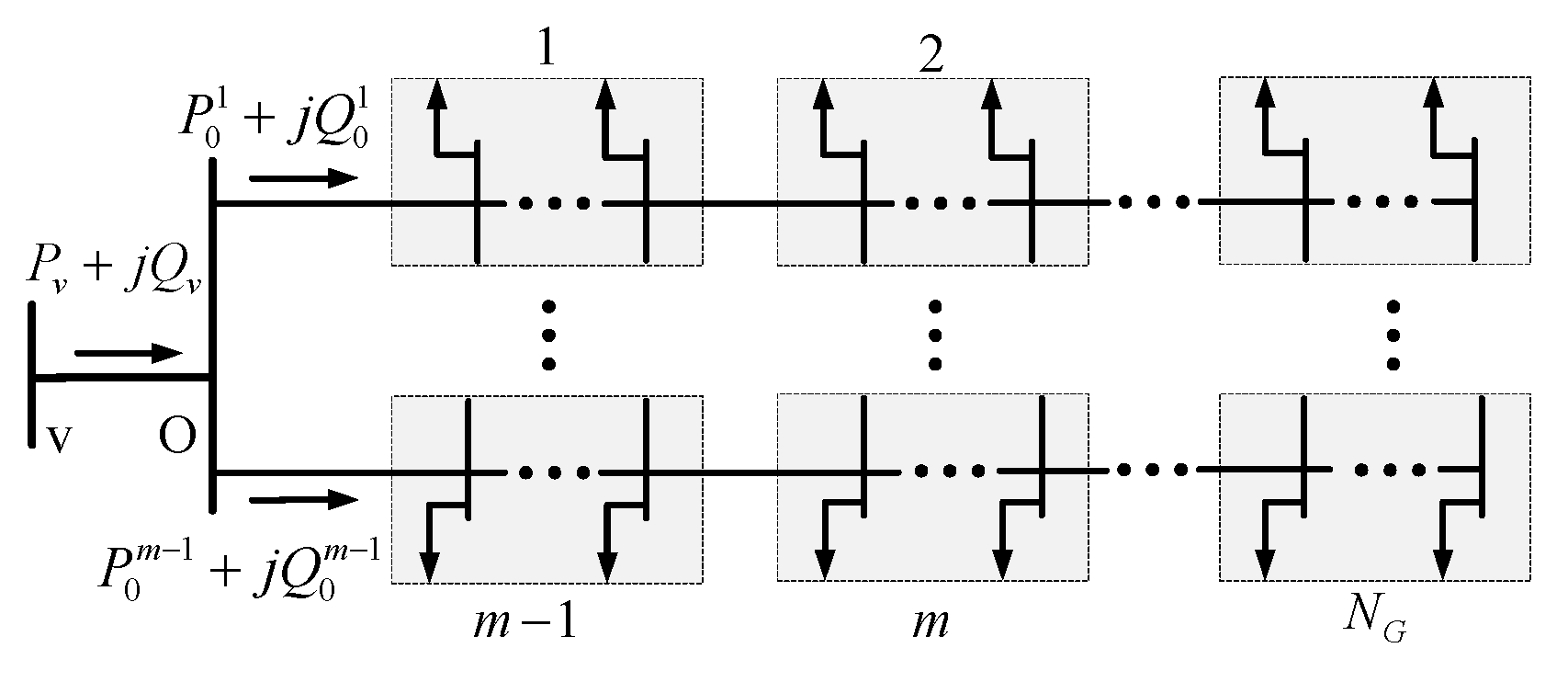
3.1. Configuration of a WF
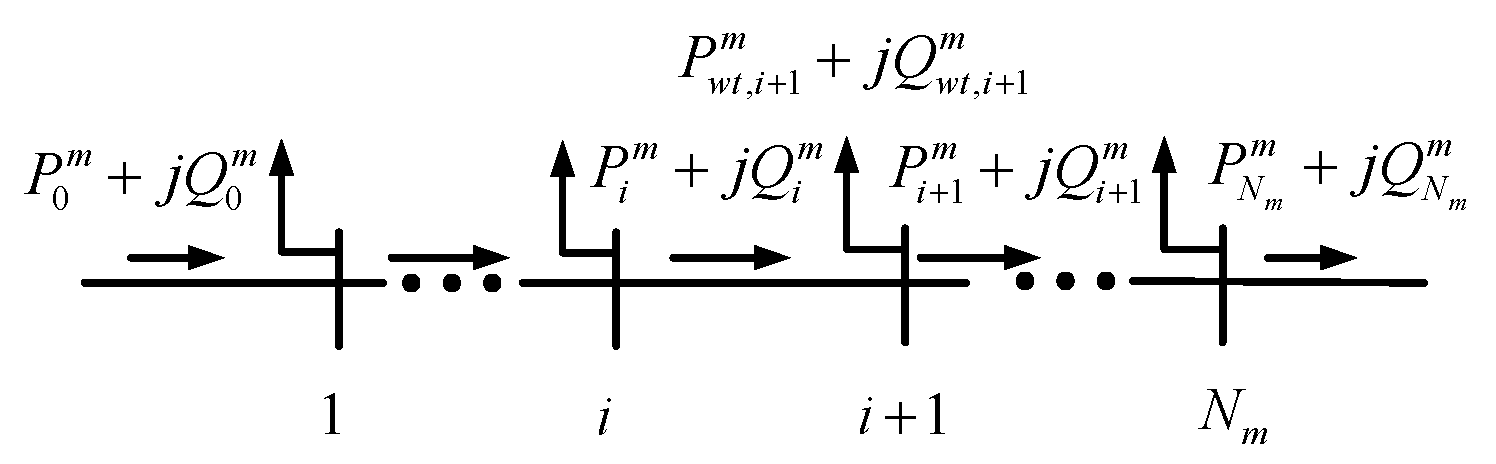
3.2. Power Flow Model of a WF
3.3. Objective Function
3.4. Grouped Optimization Scheme
3.5. Grouped Optimization Step
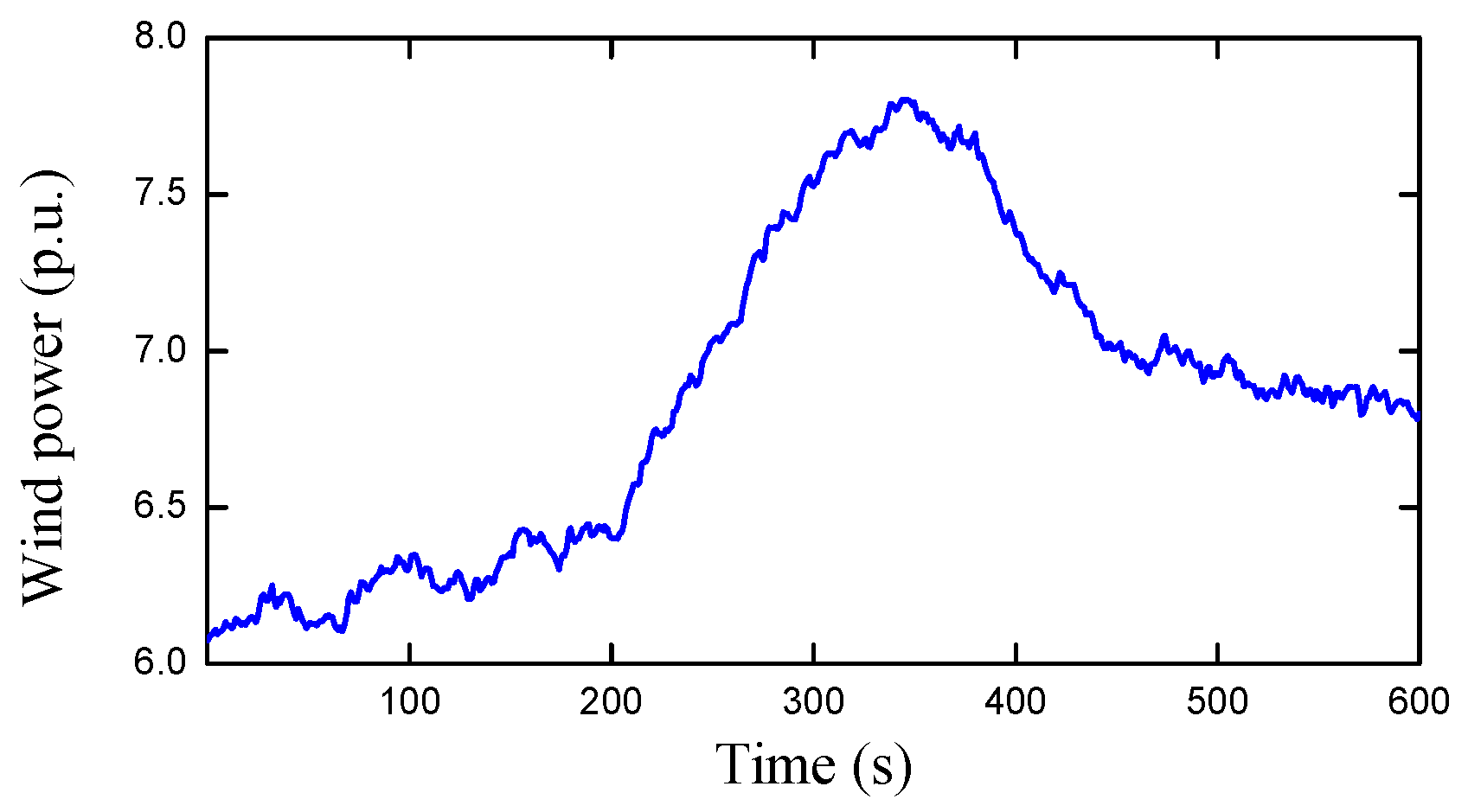
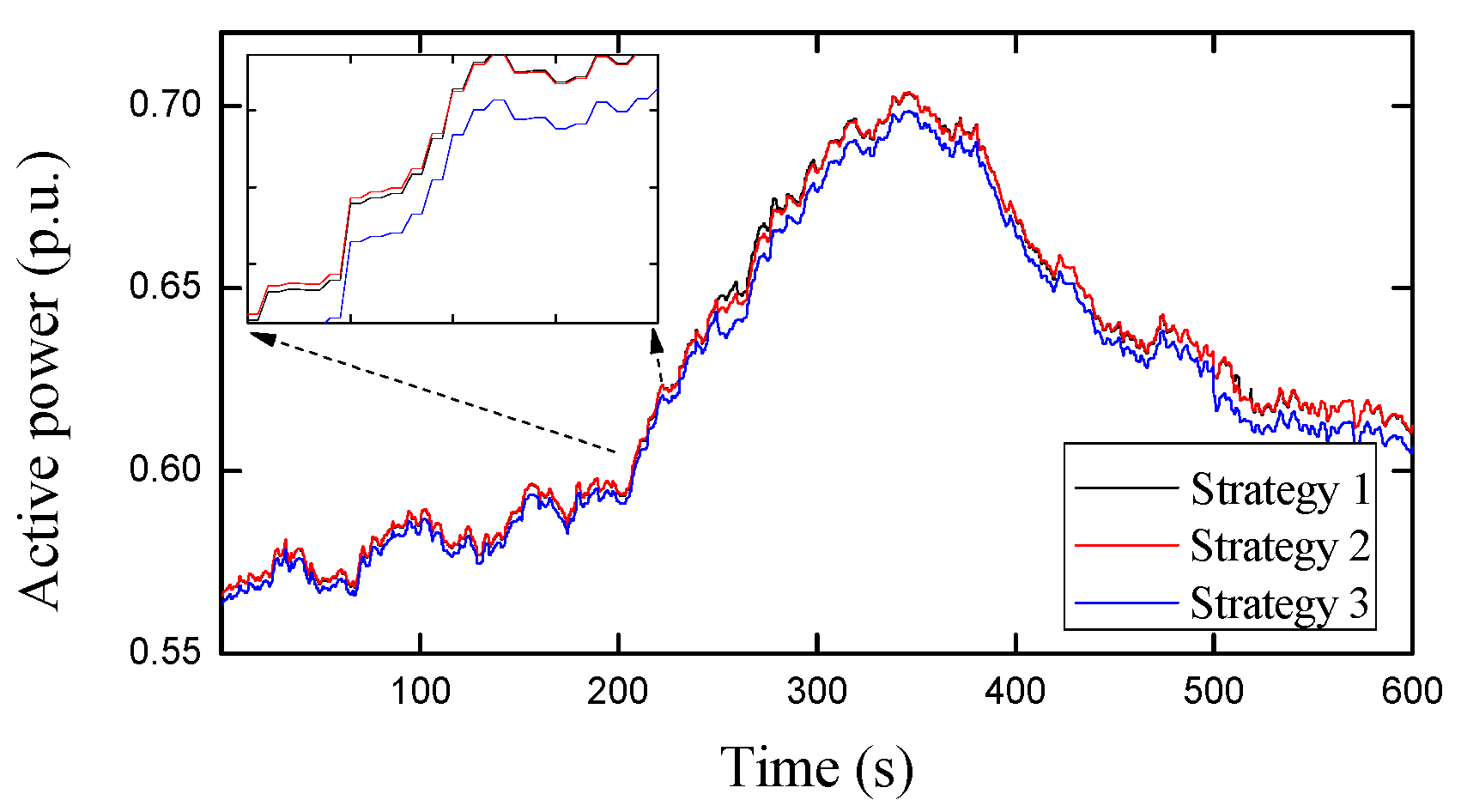
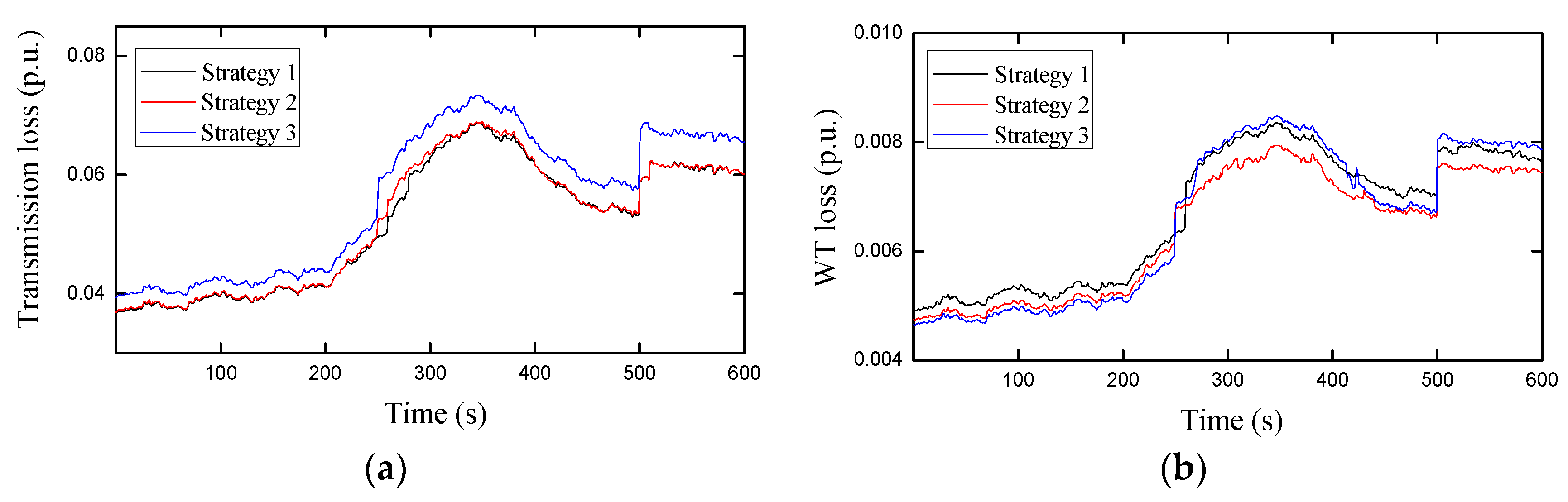
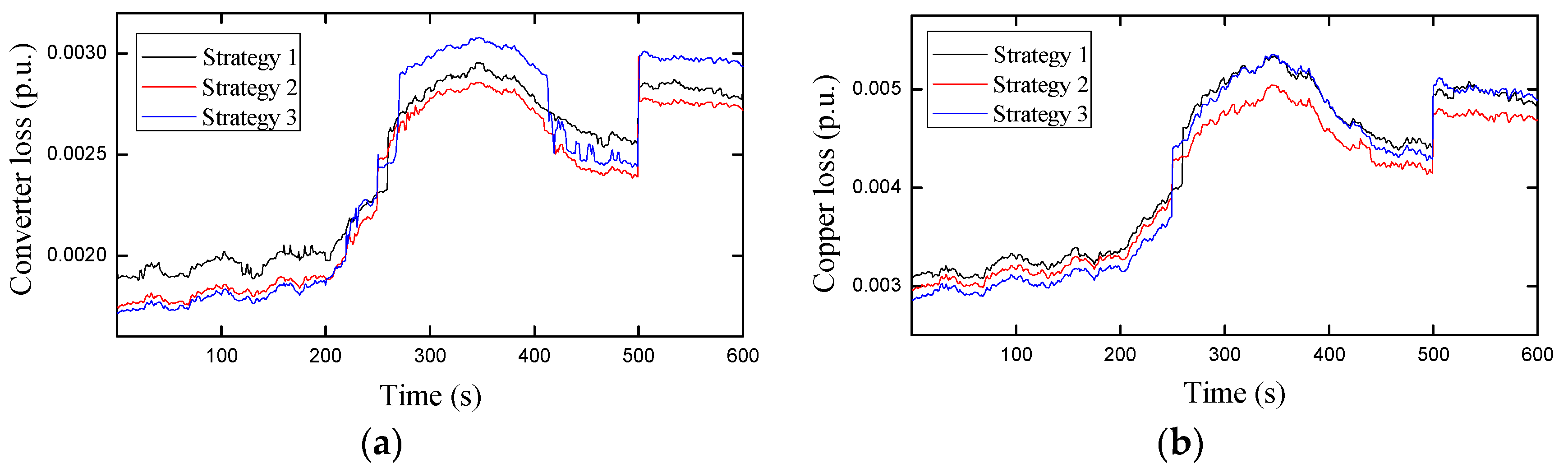
4. Simulation Results
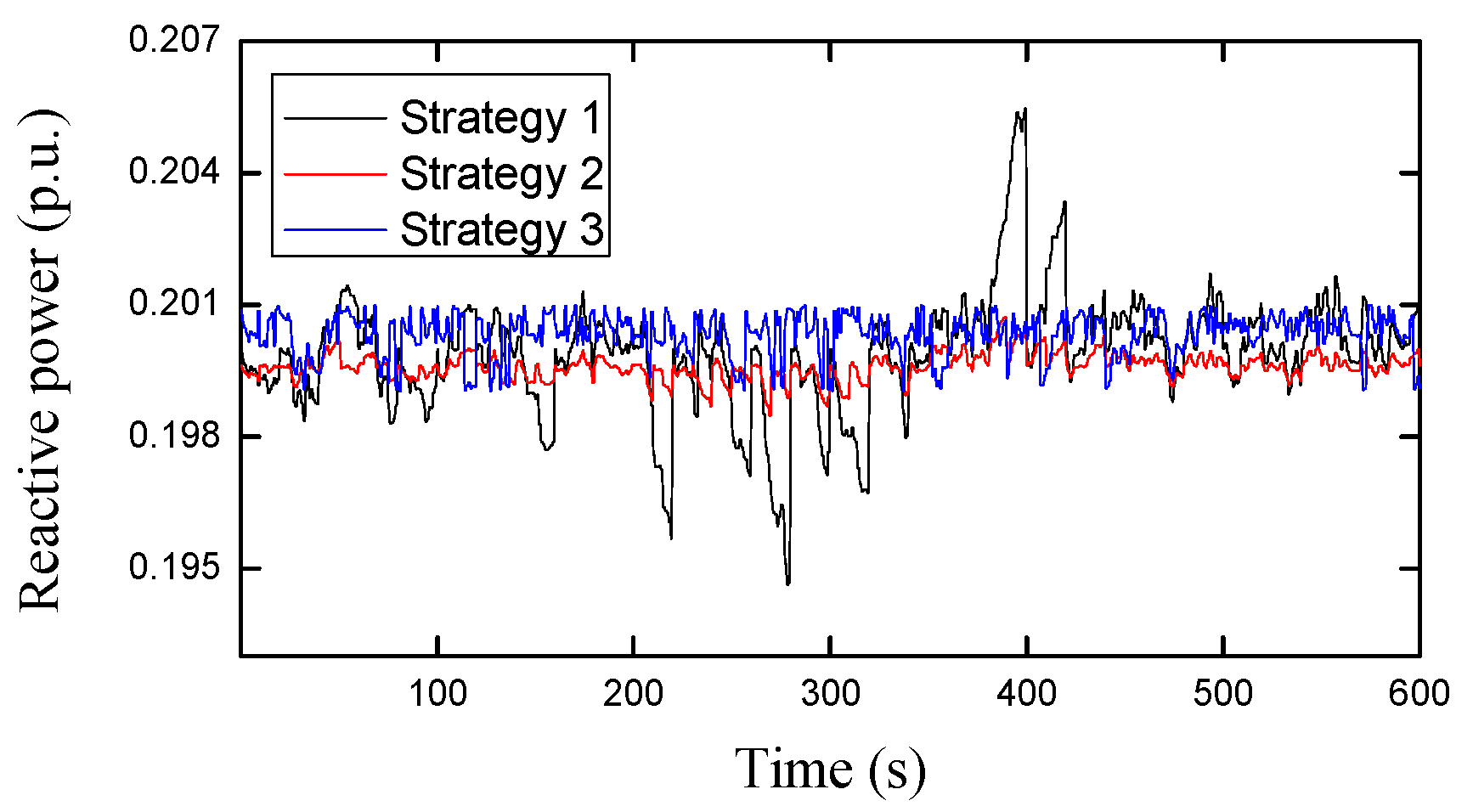
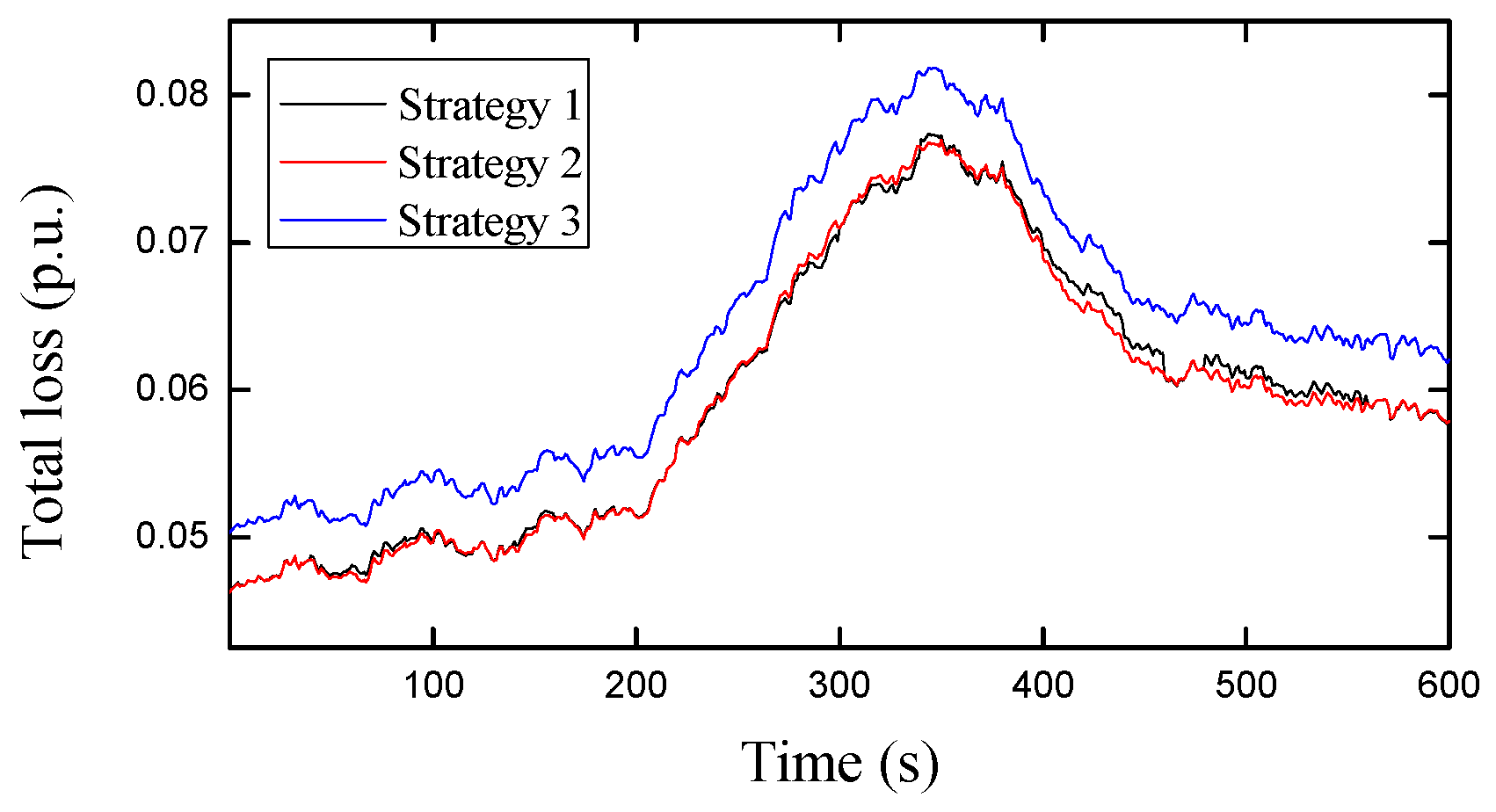
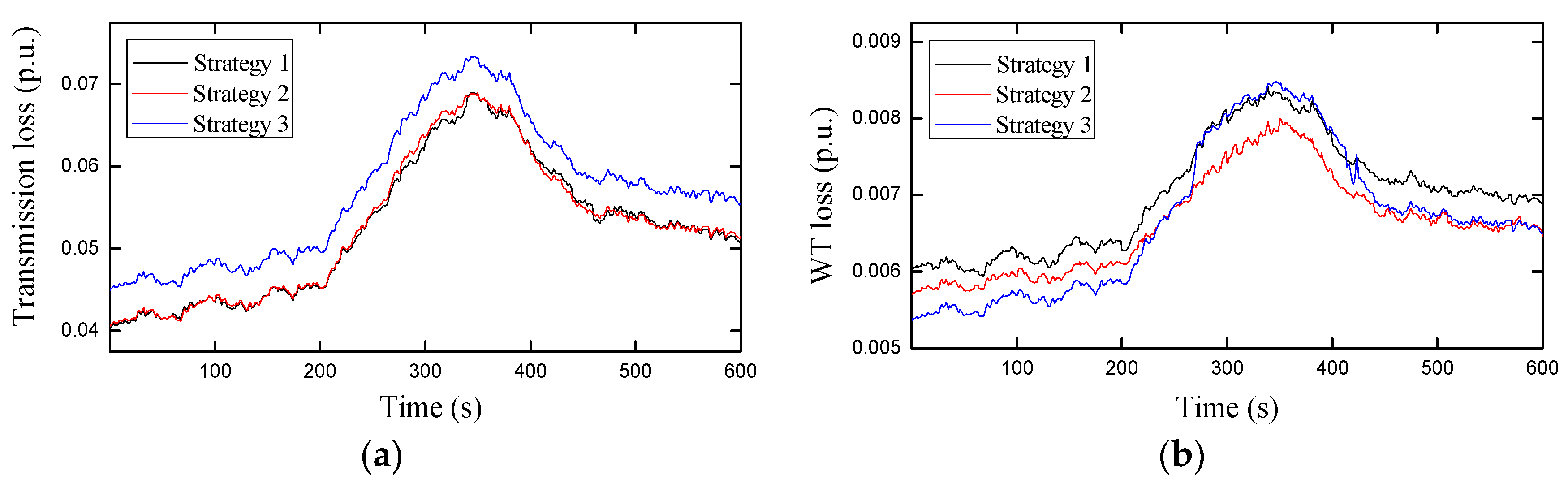
4.1. Case 1 Reactive Power of WF Remains Constant
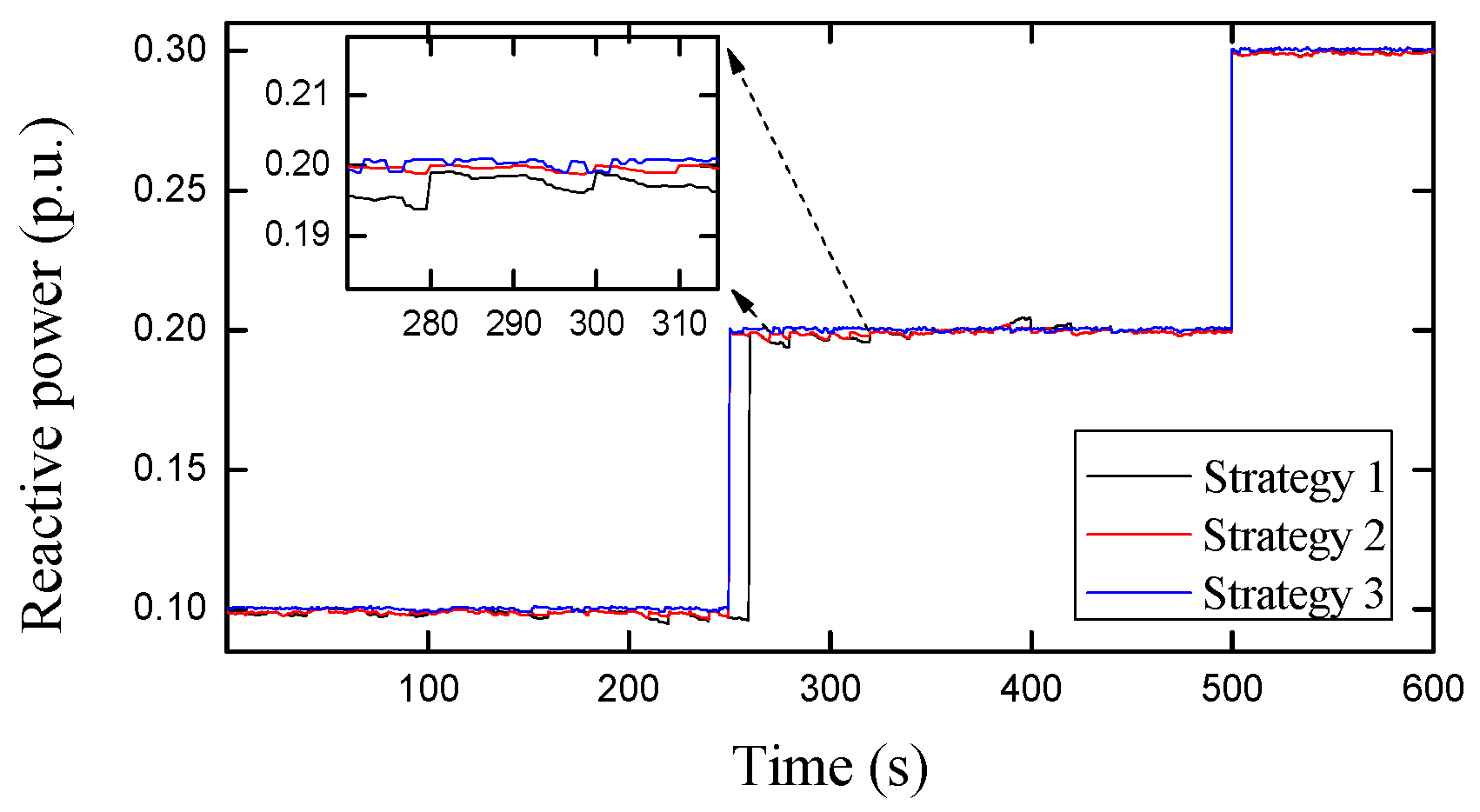
4.2. Case 2 Reactive Power of WF Remains Change
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Toulabi, M.; Bahrami, S.; Ranjbar, A.M. Application of Edge Theorem for Robust Stability Analysis of a Power System with Participating Wind Power Plants in Automatic Generation Control Task. IET Renew. Power Gener. 2017, 11, 1049–1057. [Google Scholar] [CrossRef]
- Lin, Y.; Yang, M.; Wan, C.; Wang, J.; Song, Y. A Multi-Model Combination Approach for Probabilistic Wind Power Forecasting. IEEE Trans. Sustain. Energy 2019, 10, 226–237. [Google Scholar] [CrossRef]
- Mahzouni-Sani, M.; Hamidi, A.; Nazarpour, D.; Golshannavaz, S. Multi-objective Linearised Optimal Reactive Power Dispatch of wind-integrated Transmission Networks. IET Gener. Transm. Distrib. 2019, 13, 2686–2696. [Google Scholar] [CrossRef]
- Shao, H.; Cai, X.; Li, Z.; Zhou, D.; Sun, S.; Guo, L.; Cao, Y.; Rao, F. Stability Enhancement and Direct Speed Control of DFIG Inertia Emulation Control Strategy. IEEE Access 2019, 7, 120089–120105. [Google Scholar] [CrossRef]
- Wu, X.; Guan, Y.; Yang, X.; Ning, W.; Wang, M. Low-cost Control Strategy Based on Reactive Power Regulation of DFIG-based Wind Farm for SSO Suppression. IET Renew. Power Gener. 2019, 13, 33–39. [Google Scholar] [CrossRef]
- Xi, X.; Geng, H.; Yang, G. Torsional Oscillation Damping Control for DFIG-Based Wind Farm Participating in Power System Frequency Regulation. In Proceedings of the 2016 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 2–6 October 2016; Volume 4, pp. 1–5. [Google Scholar] [CrossRef]
- Shi, K.; Yin, X.; Jiang, L.; Liu, Y.; Hu, Y.; Wen, H.; Xin, Y. Perturbation Estimation Based Nonlinear Adaptive Power Decoupling Control for DFIG Wind Turbine. IEEE Trans. Power Electron. 2019, 35, 319–333. [Google Scholar] [CrossRef]
- Tang, W.; Hu, J.; Chang, Y.; Liu, F. Modeling of DFIG-Based Wind Turbine for Power System Transient Response Analysis in Rotor Speed Control Timescale. IEEE Trans. Power Syst. 2018, 33, 6795–6805. [Google Scholar] [CrossRef]
- Peng, L.; Yuting, W.; Haosheng, H.; Xiangping, K.; Yubo, Y. A Coodinated Voltage Control Scheme for Power System with Large-Scale Wind Power Integration. In Proceedings of the International Conference on Renewable Power Generation (RPG 2015), Beijing, China, 17–18 October 2015; pp. 1–5. [Google Scholar]
- Lee, K.; Ha, J.-I. Minimum Copper Loss Control of Doubly-Fed Induction Generator for Wind Turbines. In Proceedings of the 2014 IEEE Symposium on Power Electronics and Machines for Wind and Water Applications, Milwaukee, WI, USA, 24–26 July 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Kanna, B.; Singh, S.N. Towards Reactive Power Dispatch Within a WF Using Hybrid PSO. Int. J. Elect. Power Energy Syst. 2015, 69, 232–240. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, X.; Qi, X. Reactive Power Optimization for Distribution System with Distributed Generations Based on AHSPSO Algorithm. In Proceedings of the 2016 China International Conference on Electricity Distribution (CICED), Institute of Electrical and Electronics Engineers (IEEE), Xi’an, China, 10–13 August 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Zhang, B.; Hu, W.; Hou, P.; Chen, Z. Reactive Power Dispatch for Loss Minimization of a Doubly Fed Induction Generator Based Wind Farm. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS) IEEE, Hangzhou, China, 22–25 October 2014; pp. 1373–1378. [Google Scholar] [CrossRef]
- Guo, Y.; Gao, H.; Wu, Q.; Zhao, H.; Østergaard, J. Coordinated Voltage Control Scheme for VSC-HVDC Connected Wind Power Plants. IET Renew. Power Gener. 2018, 12, 198–206. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.H.; Cheng, J.-S. Online Voltage Security Enhancement Using Voltage Sensitivity-Based Coherent Reactive Power Control in Multi-Area Wind Power Generation Systems. IEEE Trans. Power Syst. 2021, 36, 2729–2732. [Google Scholar] [CrossRef]
- Yao, Q.; Hu, Y.; Chen, Z. Active Power Dispatch Strategy of the Wind Farm Based on Improved Multi-Agent Consistency Algo-Rithm. IET Renew. Power Gener. 2019, 9, 2693–2704. [Google Scholar] [CrossRef]
- Yang, J.; Zheng, S.; Song, D.; Su, M.; Yang, X.; Joo, Y.H. Comprehensive Optimization for Fatigue Loads of Wind Turbines in Complex-Terrain Wind Farms. IEEE Trans. Sustain. Energy 2021, 12, 909–919. [Google Scholar] [CrossRef]
- Guo, Y.; Gao, H.; Xing, H.; Wu, Q.; Lin, Z. Decentralized Coordinated Voltage Control for VSC-HVDC Connected Wind Farms Based on ADMM. IEEE Trans. Sustain. Energy 2019, 10, 800–810. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Wu, Q.; Bao, W.; Hatziargyriou, N.D.; Ding, L.; Rong, F. Hierarchical Optimal Control for Synthetic Inertial Response of Wind Farm Based on Alter-Nating Direction Method of Multipliers. IEEE Trans. Sustain. Energy 2021, 1, 25–35. [Google Scholar] [CrossRef]
- Ye, L.; Zhang, C.; Tang, Y.; Zhong, W.; Zhao, Y.; Lu, P.; Zhai, B.; Lan, H.; Li, Z. Hierarchical Model Predictive Control Strategy Based on Dynamic Active Power Dispatch for Wind Power Cluster Integration. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Online Event, 3–6 August 2020; Volume 6, p. 1. [Google Scholar] [CrossRef]
- Rong, F.; Ning, X.; Zhai, Y.; Zhou, S.; Huang, Y.; Yang, G. Research on Grouped Optimization Control Strategy for Large DFIG Based Wind Farm. In Proceedings of the 2020 8th International Conference on Power Electronics Systems and Applications (PESA), Institute of Electrical and Electronics Engineers (IEEE), Hong Kong, China, 7–10 December 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, B.; Hu, W.; Hou, P.; Tan, J.; Soltani, M.; Chen, Z. Review of Reactive Power Dispatch Strategies for Loss Minimization in a DFIG-Based Wind Farm. Energies 2017, 10, 856. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Hou, P.; Hu, W.; Soltani, M.; Chen, C.; Chen, Z. A Reactive Power Dispatch Strategy with Loss Minimization for a DFIG-Based Wind Farm. IEEE Trans. Sustain. Energy 2016, 7, 914–923. [Google Scholar] [CrossRef]
- Ouyang, J.; Tang, T.; Yao, J.; Li, M. Active Voltage Control for DFIG-Based Wind Farm Integrated Power System by Coordinating Active and Reactive Powers Under Wind Speed Variations. IEEE Trans. Energy Convers. 2019, 34, 1504–1511. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Particles number, NP | 150 |
| Reactive accuracy, | 0.01 |
| Number of groups, NG | 6 |
| Optimization accuracy, ε | 0.00001 |
| Maximum velocity, | 0.1 |
| Minimum velocity, | −0.1 |
| Constant coefficient, | 1.4961 |
| Constant coefficient, | 1.4961 |
| Parameters | Value | Per Unit Value |
|---|---|---|
| Rated Mechanical Power | 5 MW | 0.05 p.u. |
| Rated stator voltage | 690 V | 0.017 p.u. |
| Stator Winding Resistance, Rs | 1.552 mΩ | 0.000142 p.u. |
| Rotor Winding Resistance, Rr | 1.446 mΩ | 0.000133 p.u. |
| Stator Leakage Reactance, Xs | 2.033 Ω | 0.1867 p.u. |
| Excitation reactance, Xm | 1.733 Ω | 0.1591 p.u. |
| Filter Resistance, Rfil | 0.6791 mΩ | 0.000062 p.u. |
| Rated WF Power, SWF | 100 MVA | 1.0 p.u. |
| Base Impedance, ZB | 10.89 Ω | 1.0 p.u. |
| Cable resistance, R | 0.1 Ω/km | 0.00918 p.u. |
| Cable reactance, X | 0.129 Ω/km | 0.0118 p.u. |
| Rated transformer capacity | 8000 kVA | 0.08 p.u. |
| No-load losses, | 13.5 kW | 0.0000135 p.u. |
| Load losses, | 36 kW | 0.000036 p.u. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Rong, F.; Ning, X. Optimization Control Strategy for Large Doubly-Fed Induction Generator Wind Farm Based on Grouped Wind Turbine. Energies 2021, 14, 4848. https://doi.org/10.3390/en14164848
Zhou S, Rong F, Ning X. Optimization Control Strategy for Large Doubly-Fed Induction Generator Wind Farm Based on Grouped Wind Turbine. Energies. 2021; 14(16):4848. https://doi.org/10.3390/en14164848
Chicago/Turabian StyleZhou, Shijia, Fei Rong, and Xiaojie Ning. 2021. "Optimization Control Strategy for Large Doubly-Fed Induction Generator Wind Farm Based on Grouped Wind Turbine" Energies 14, no. 16: 4848. https://doi.org/10.3390/en14164848