
A Stake-Out Prototype System Based on GNSS-RTK Technology for Implementing Accurate Vehicle Reliability and Performance Tests





Abstract
:1. Introduction
Geolocalization Applications of GNSS RTK Technology: Architecture and Functionalities of Designed Stake out System
2. Materials and Methods
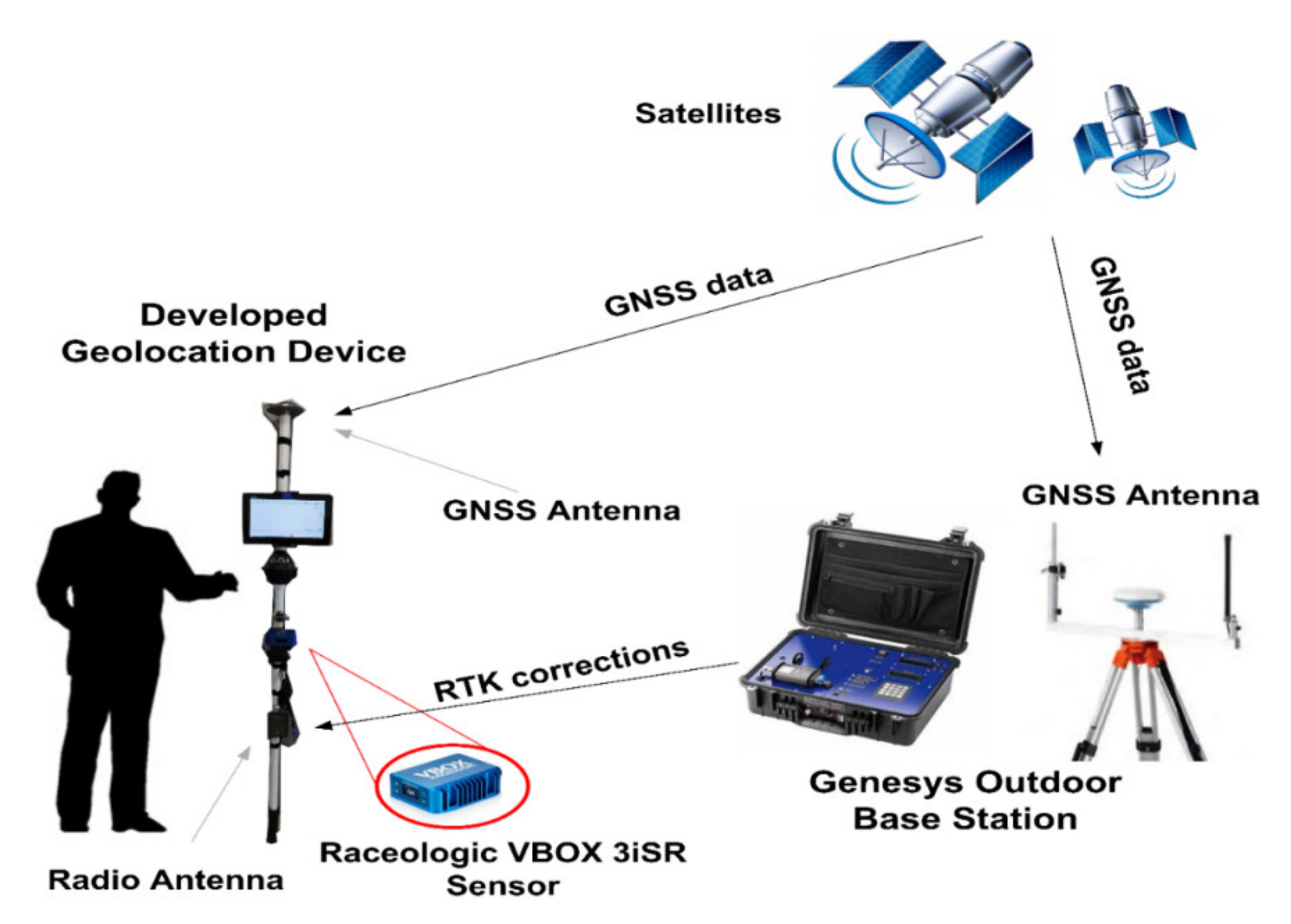
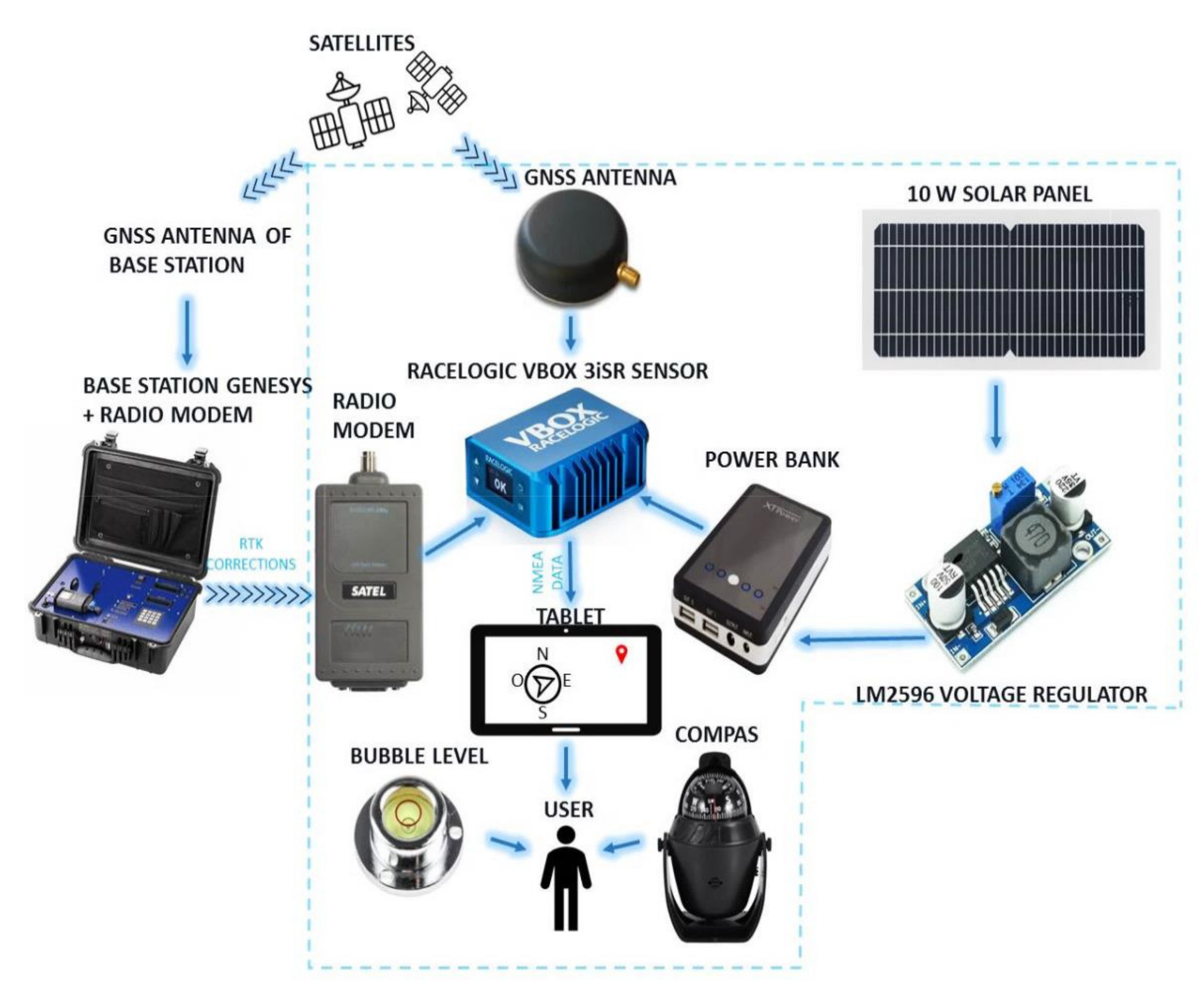
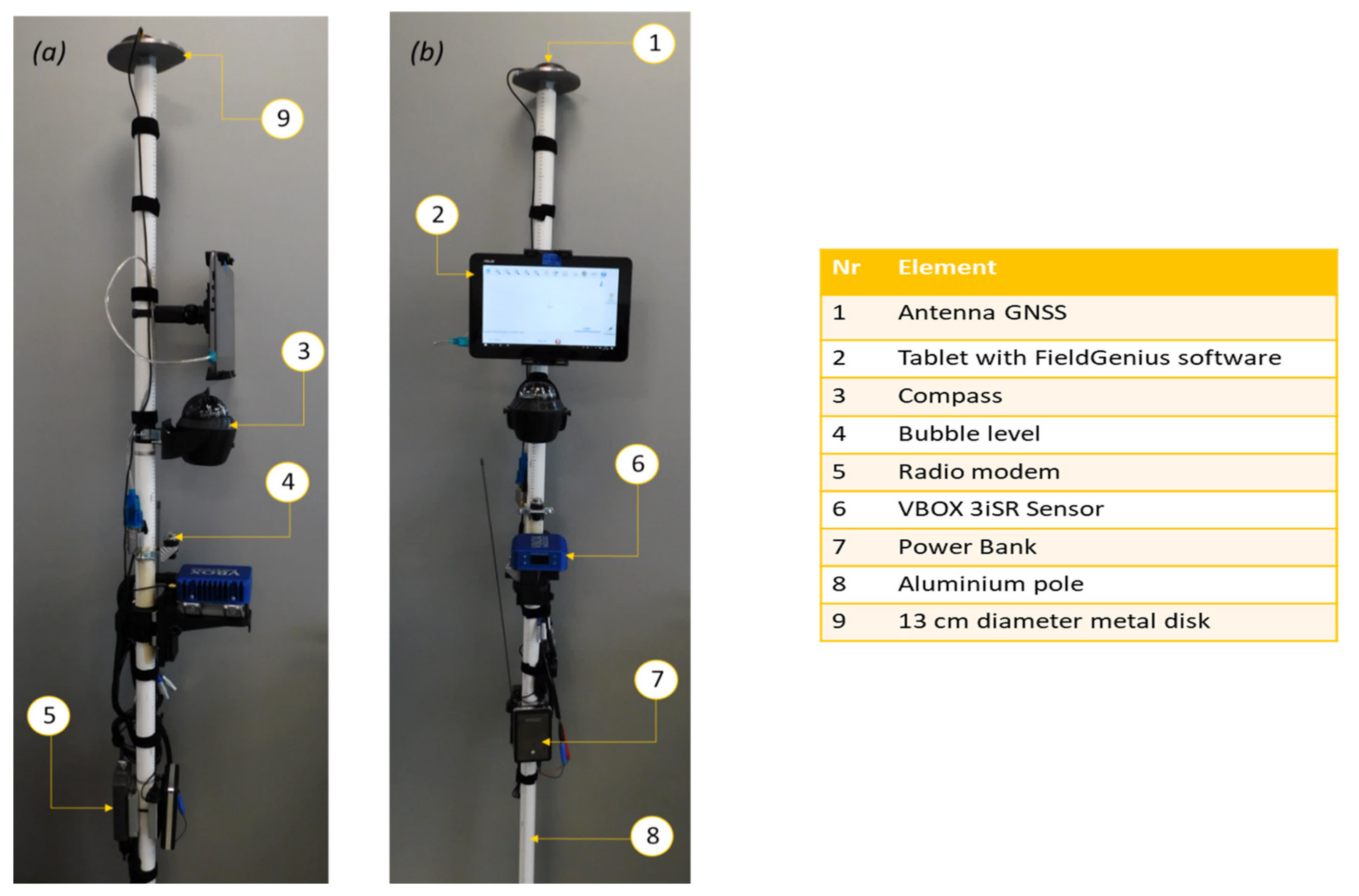
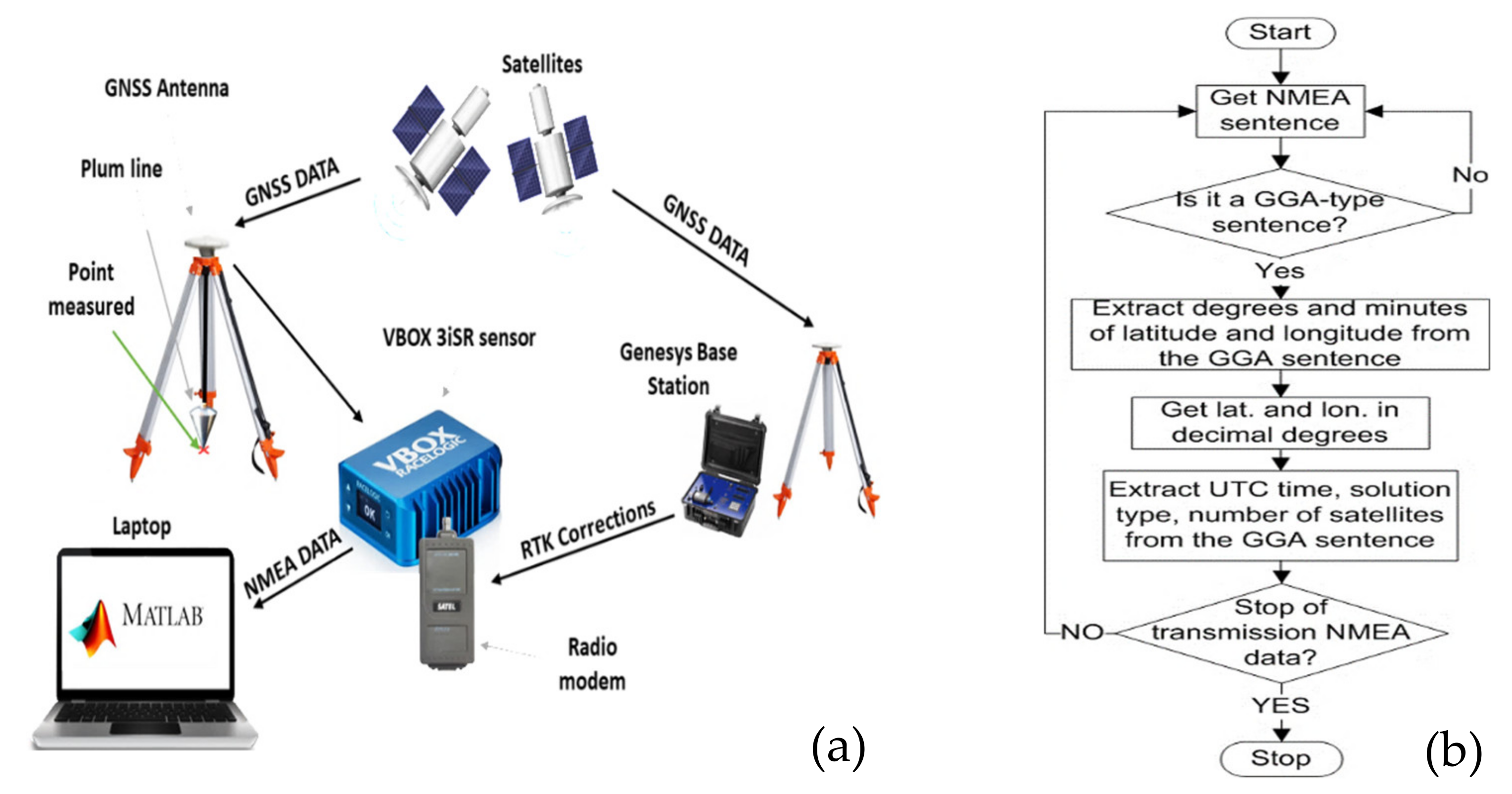
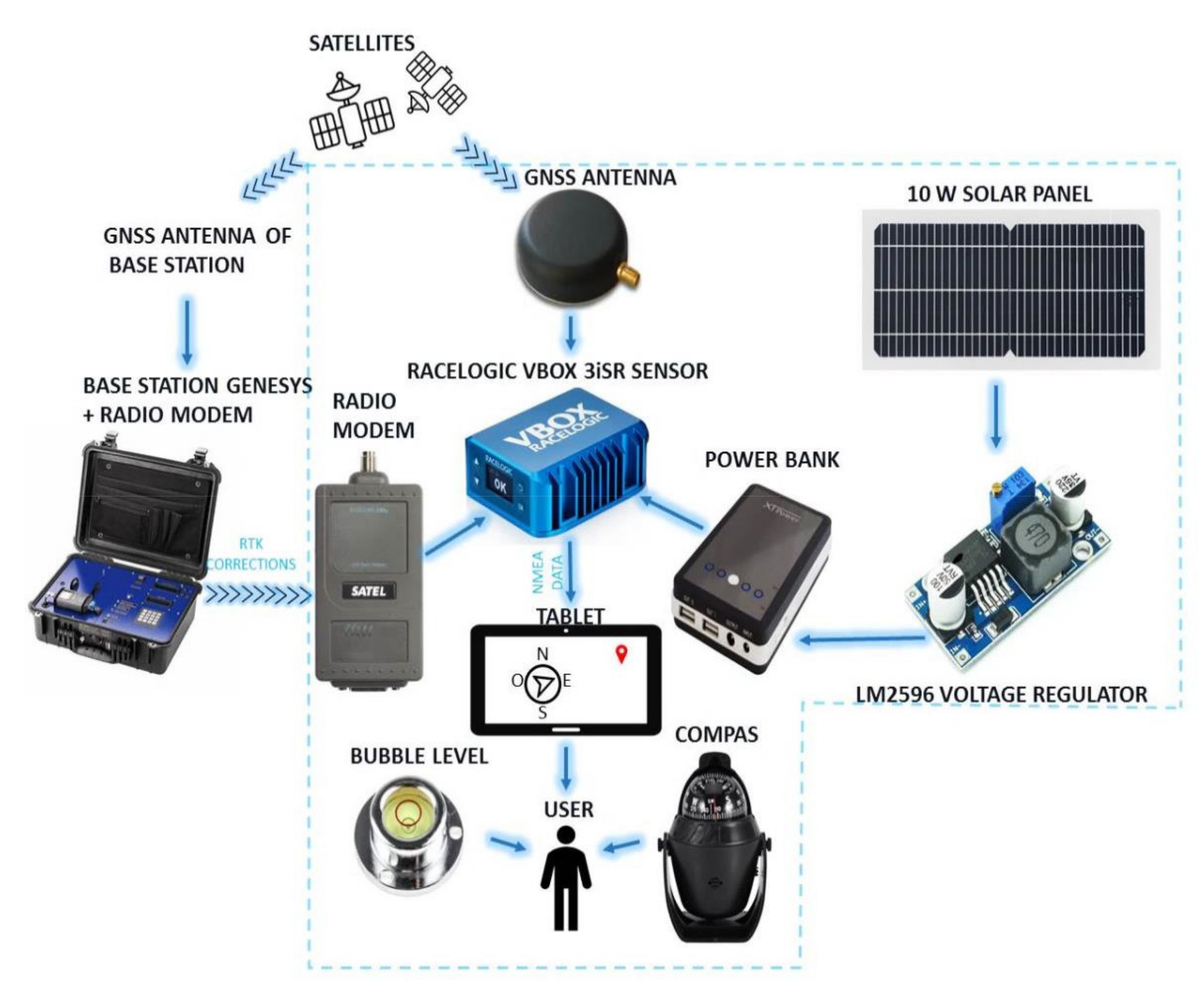
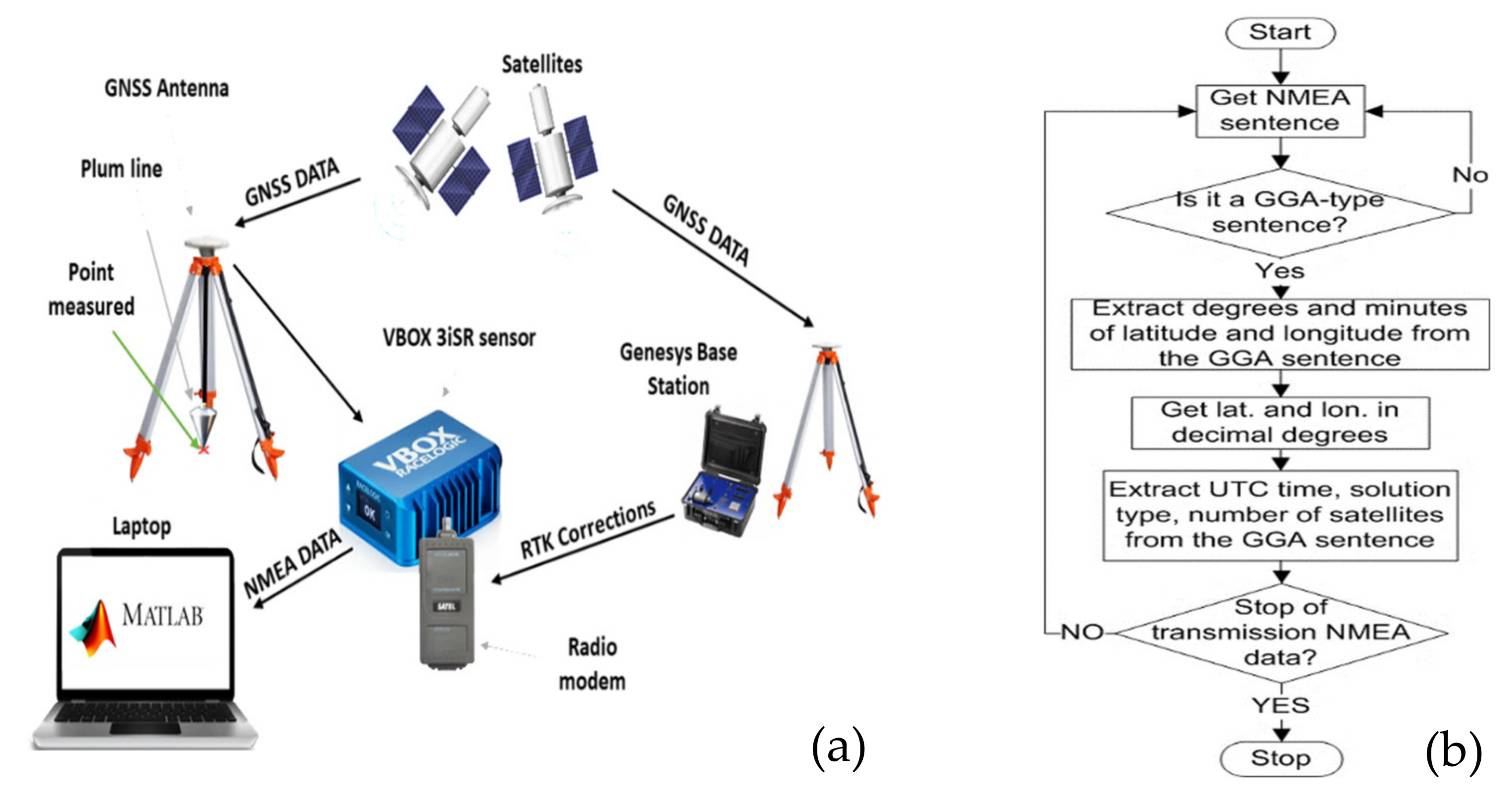
2.1. GNSS RTK-Based Stake-out Device: Technical Features and Functionalities of Used Components
- -
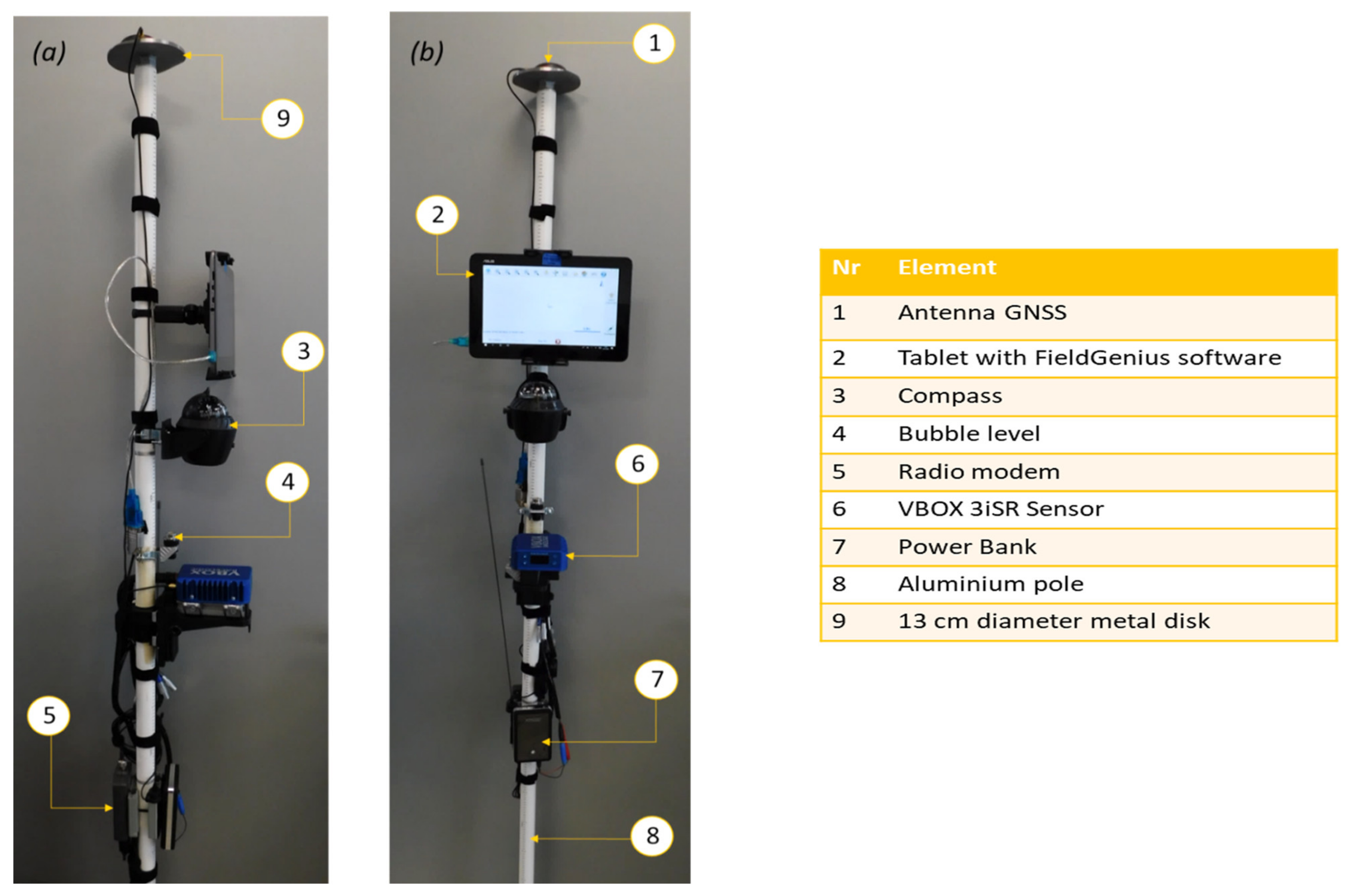
- Compass: manufactured by Dioche, it shows the user the cardinal directions to correctly reach the destination points according to FieldGenius indications.
- -
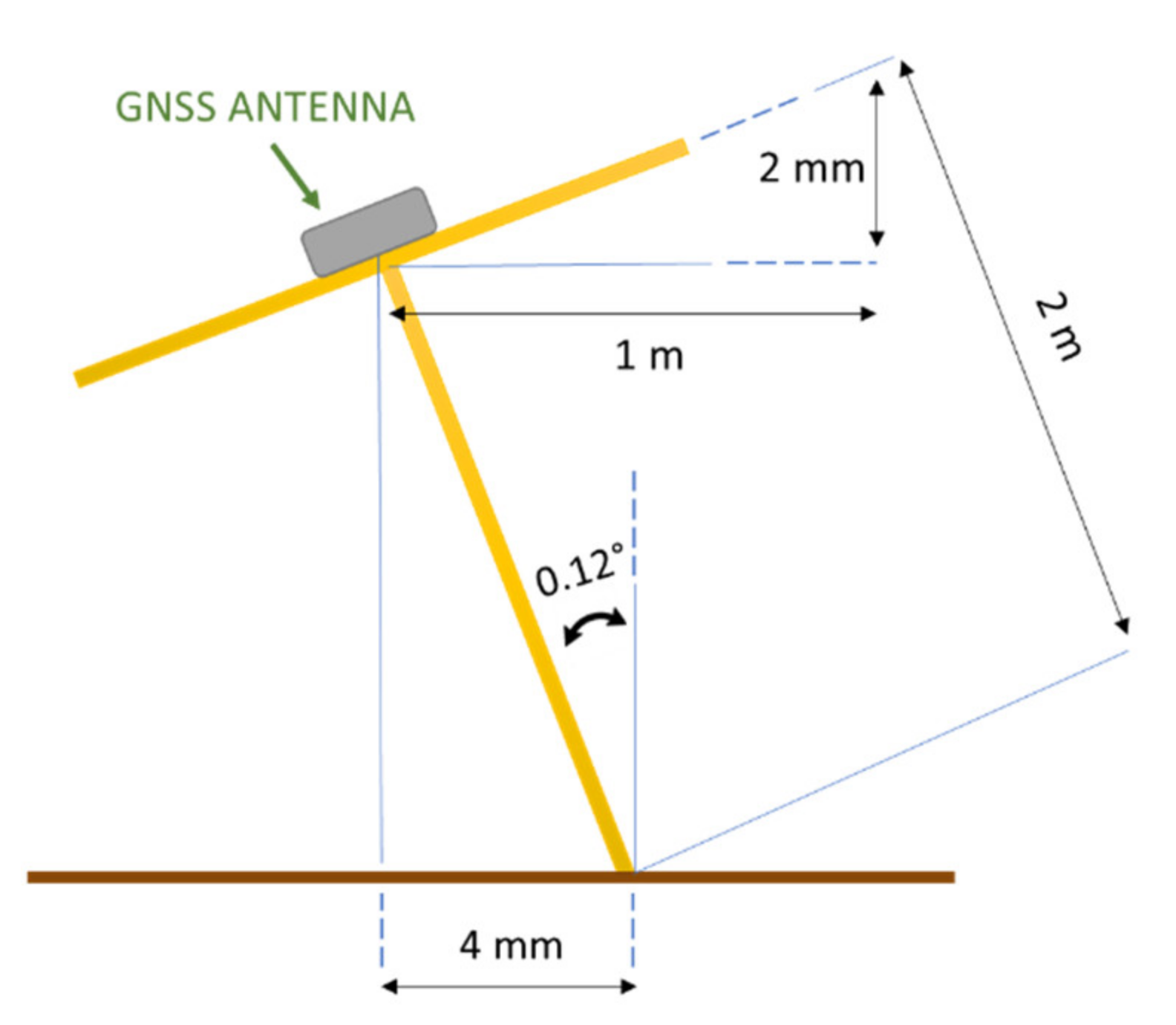
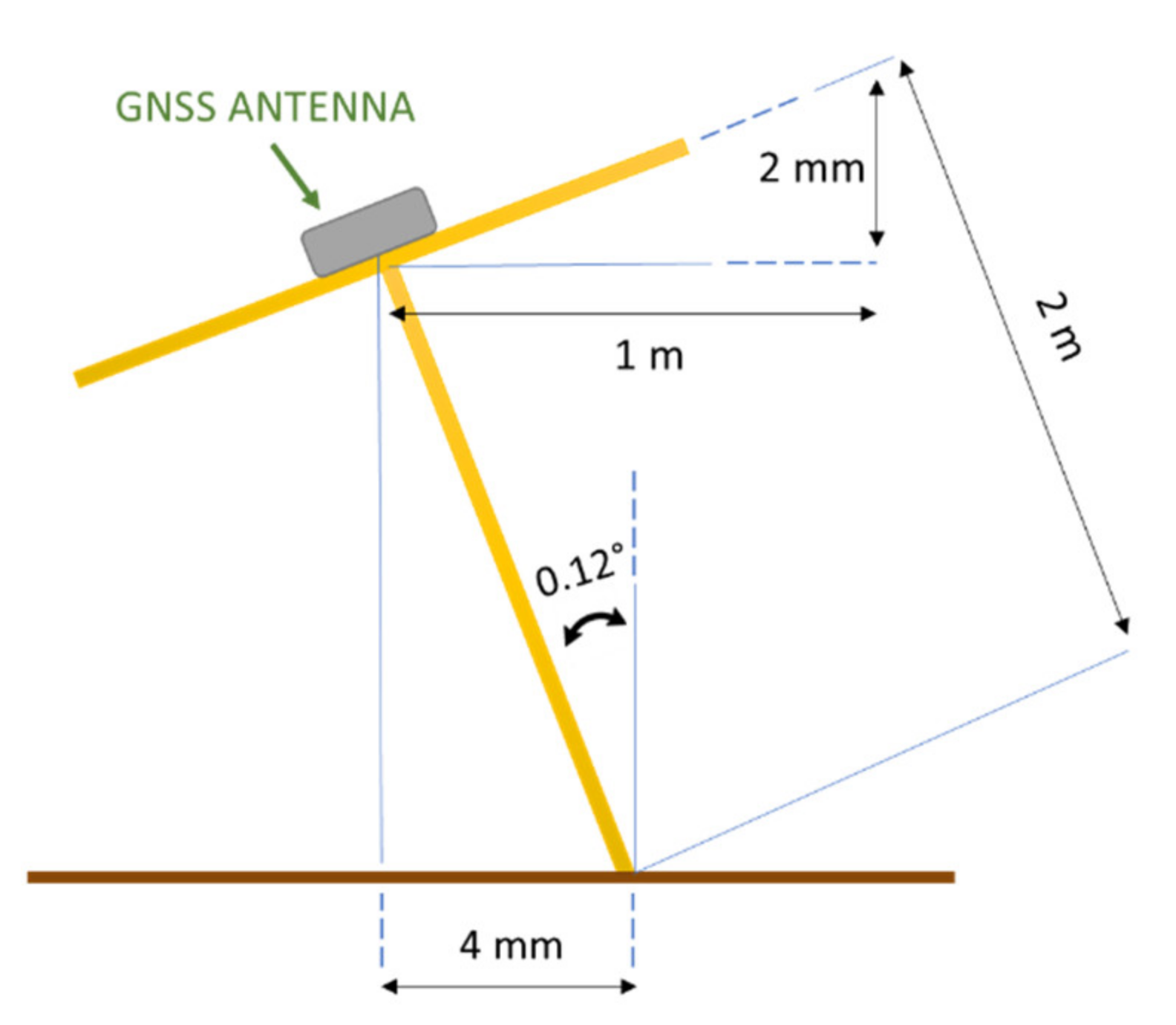
- Bubble level: it helps the user keep the pole vertical since its inclination can be a positioning error source. The circular bubble level (21.5 mm diameter), manufactured by RS Pro [21], is mounted perpendicular to the pole axis. Its accuracy is 2 mm/m, that is, if the level is oriented parallel to the ground so that the bubble is within the red circle, a deviation error of 2 mm/m from the right plane parallel to the ground is generated. This deviation results in an angular error equal to 0.12° (Figure 7). Being the GNSS antenna positioned 2 m from the pole end in contact with the ground, the positioning error ε due to the bubble level inaccuracy is:ε = l sen(θ) = 4 mm
- -
- Power bank: a 12 V power bank with 37 Wh capacity powers the VBOX 3iSR INS [22]. The 12 V voltage is supplied by the output connector able to deliver up to 2 A (VBOX 3iSR max absorbed current is 0.625 A corresponding to 7.5 W power [17]). The 37 Wh capacity ensures a 5 h operation of the VBOX 3iSR INS in the case of maximum current absorption [23].
- -
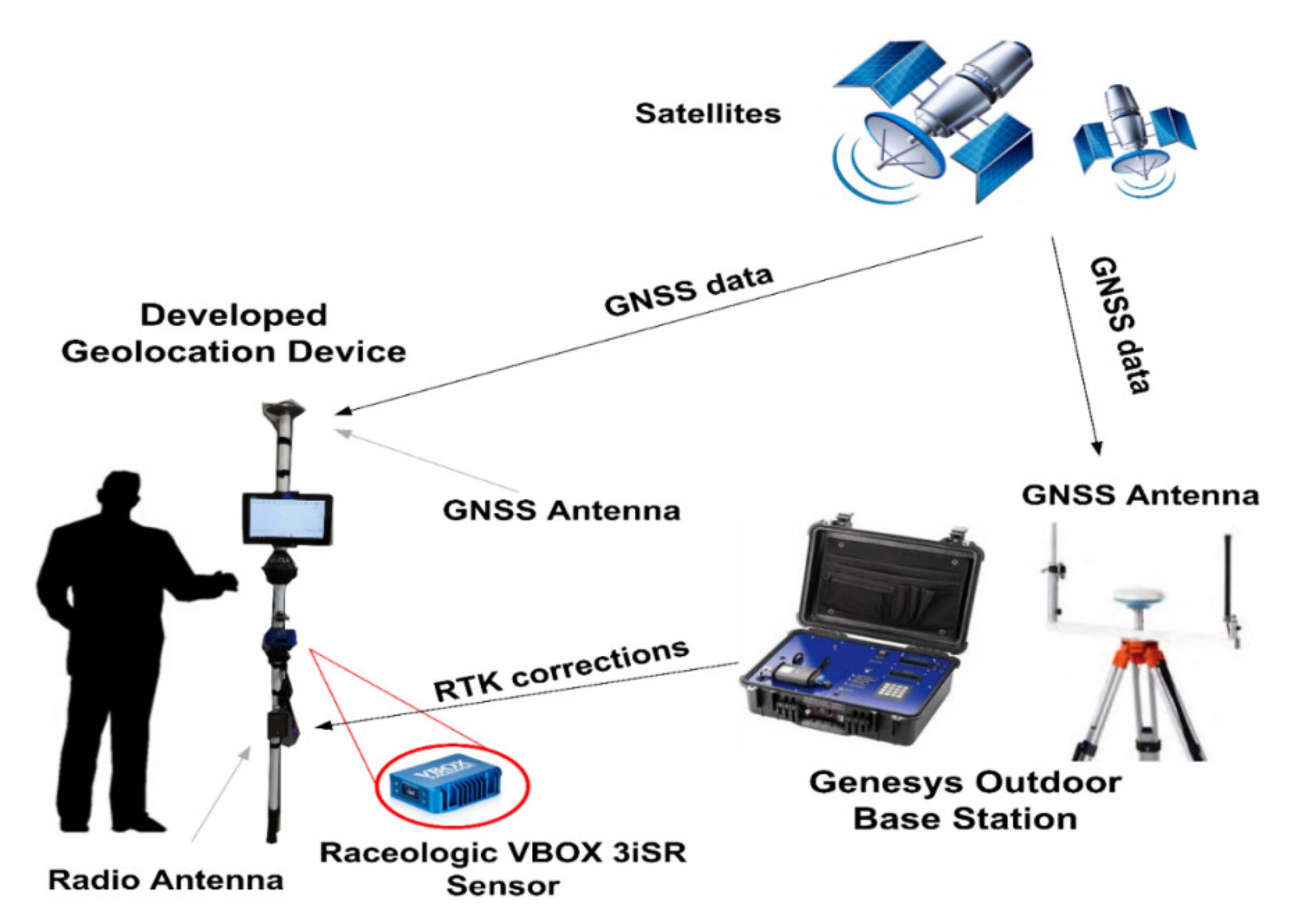
- GNSS Antenna: model RLACS156 manufactured by Raceologic [24], it is placed on the pole top to obtain a better satellite signals reception (supported frequency band 1574–1606 MHz). According to supplier indication, the antenna (circular with diameter 57 mm) is placed on a metal disk that acts as a ground plane or reflector (diameter 13 cm, thickness 1 cm), with both centers lying on the pole axis [25]. The metal disk redirects the antenna back reception in the frontal direction, improving its gain; however, if it is placed too close to the antenna, the image current produced on the surface can be detrimental to the antenna efficiency [26]. It must be placed a wavelength quarter away from the antenna base so that the back-lobes undergo a 180° phase shift leading to a destructive combination [27].
- -
- Radio modem: model Satel Satelline-Easy; it allows the VBOX 3iSR INS to receive RTK corrections from the base station (frequency range 403–473 MHz) [28].
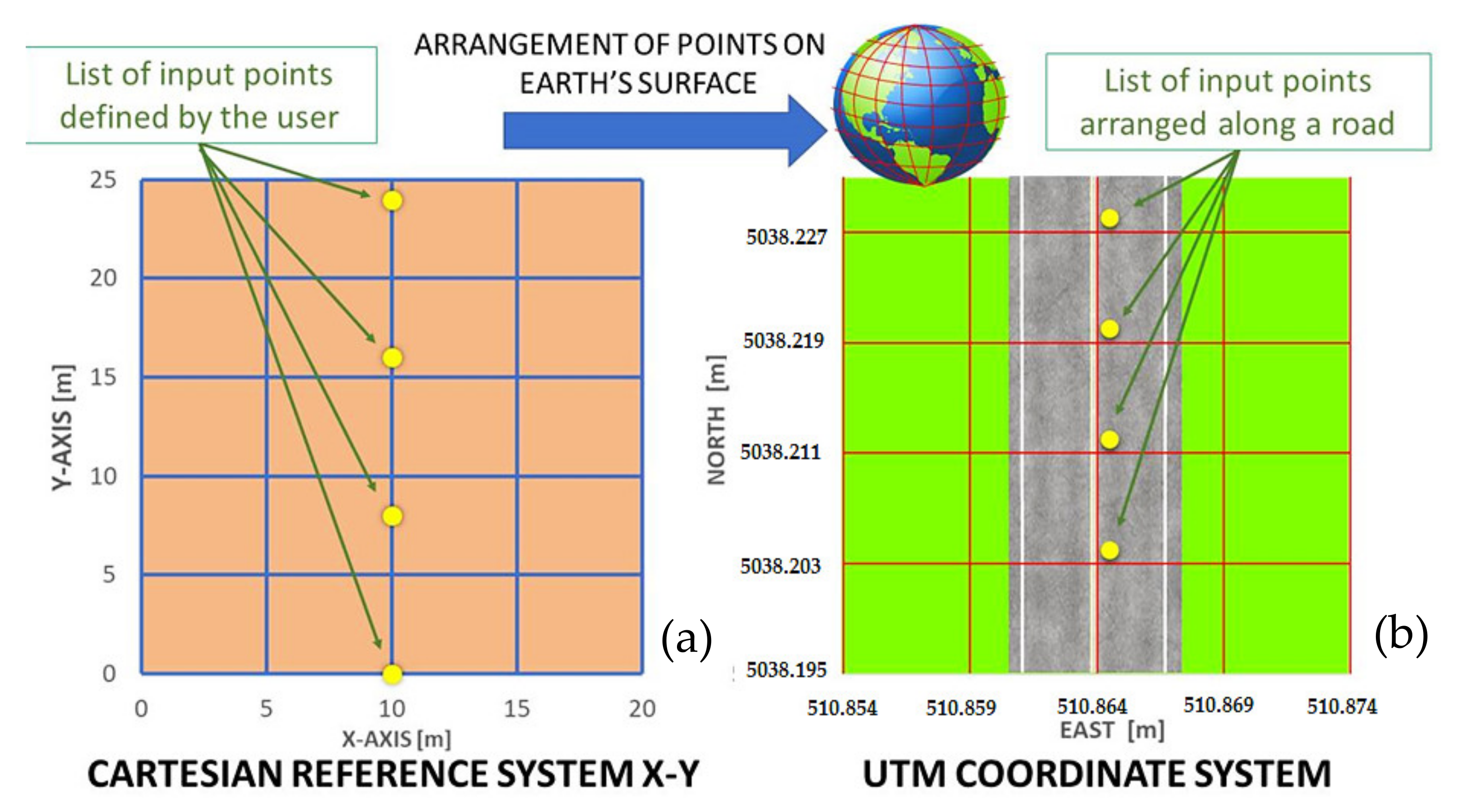
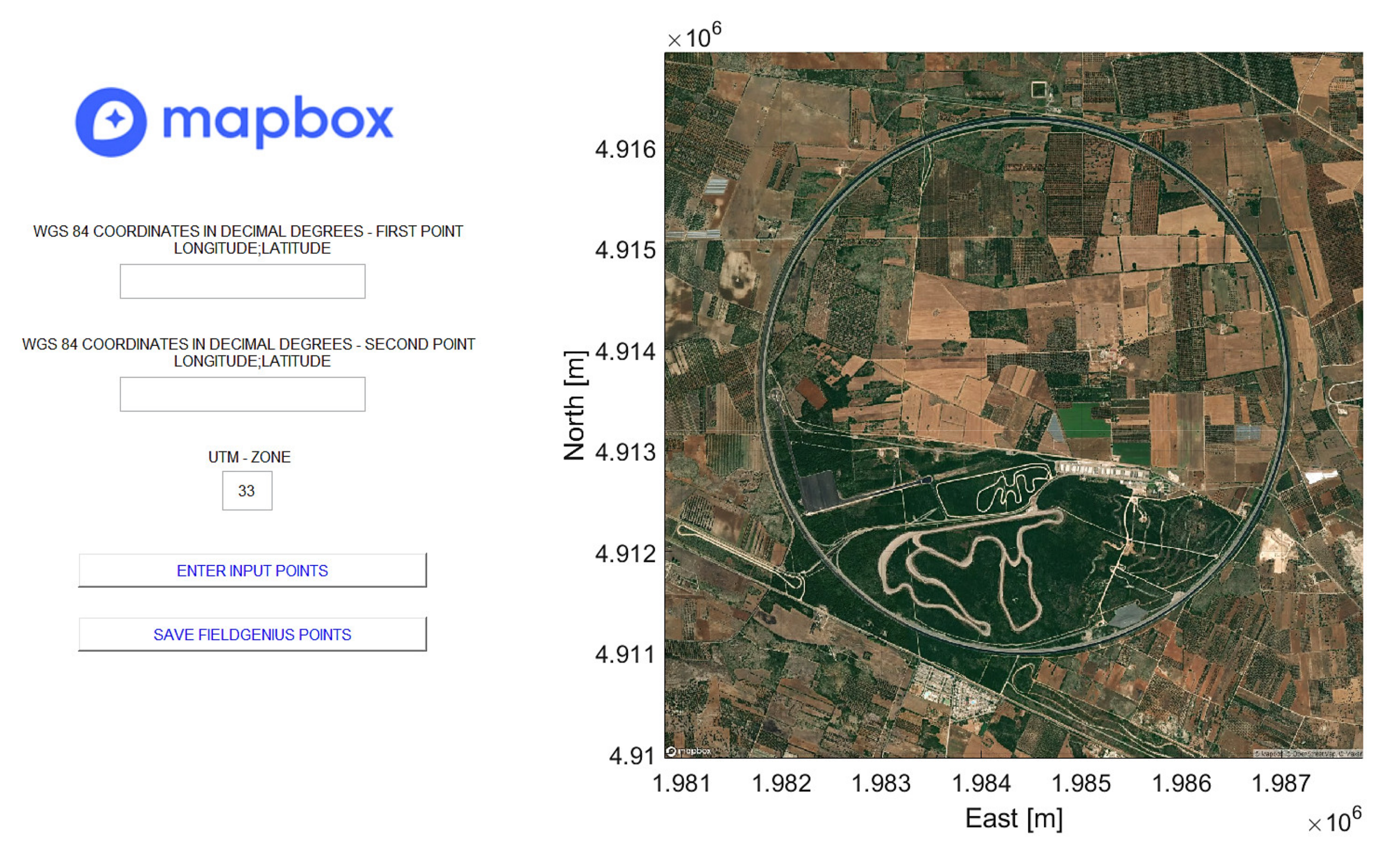
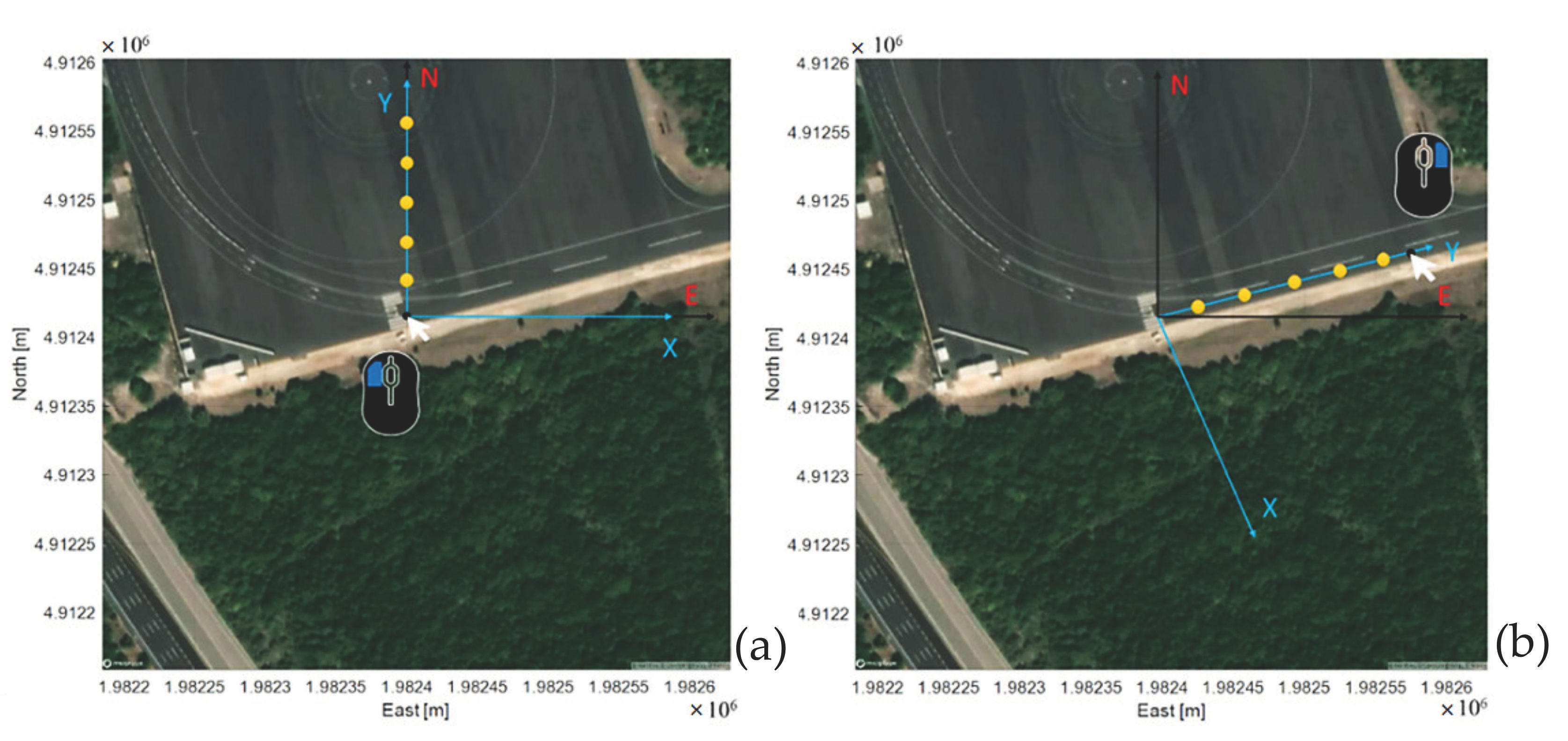
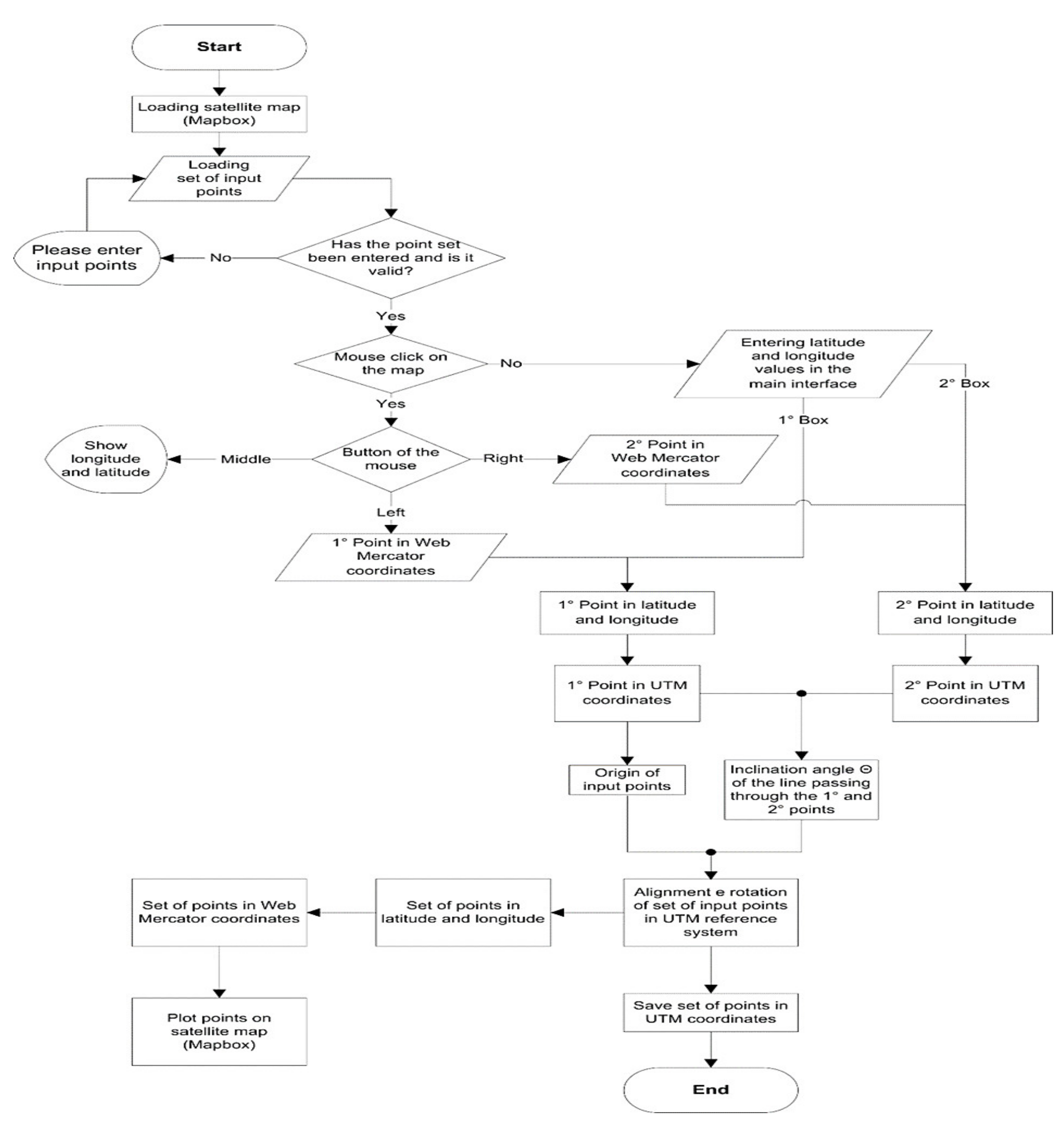
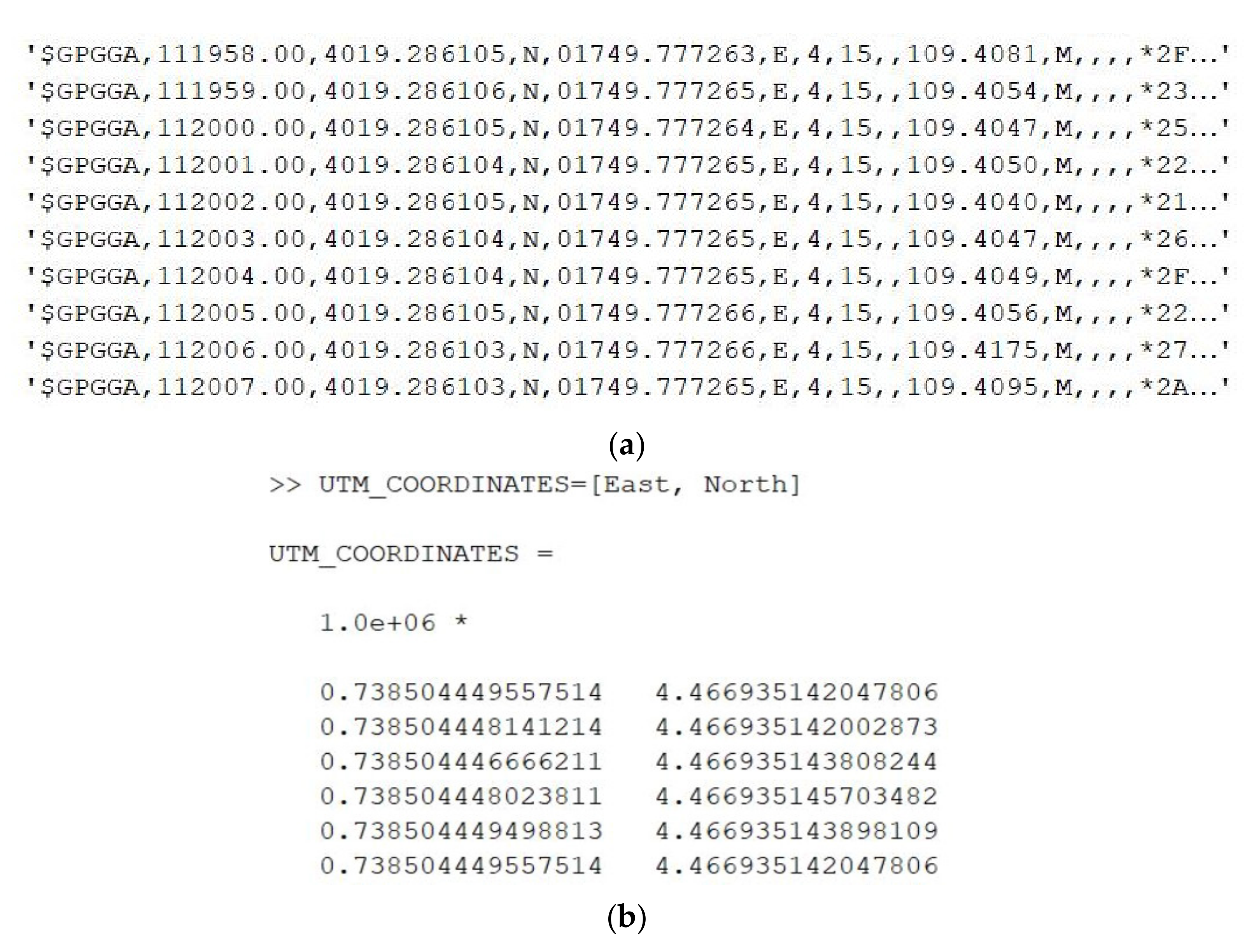
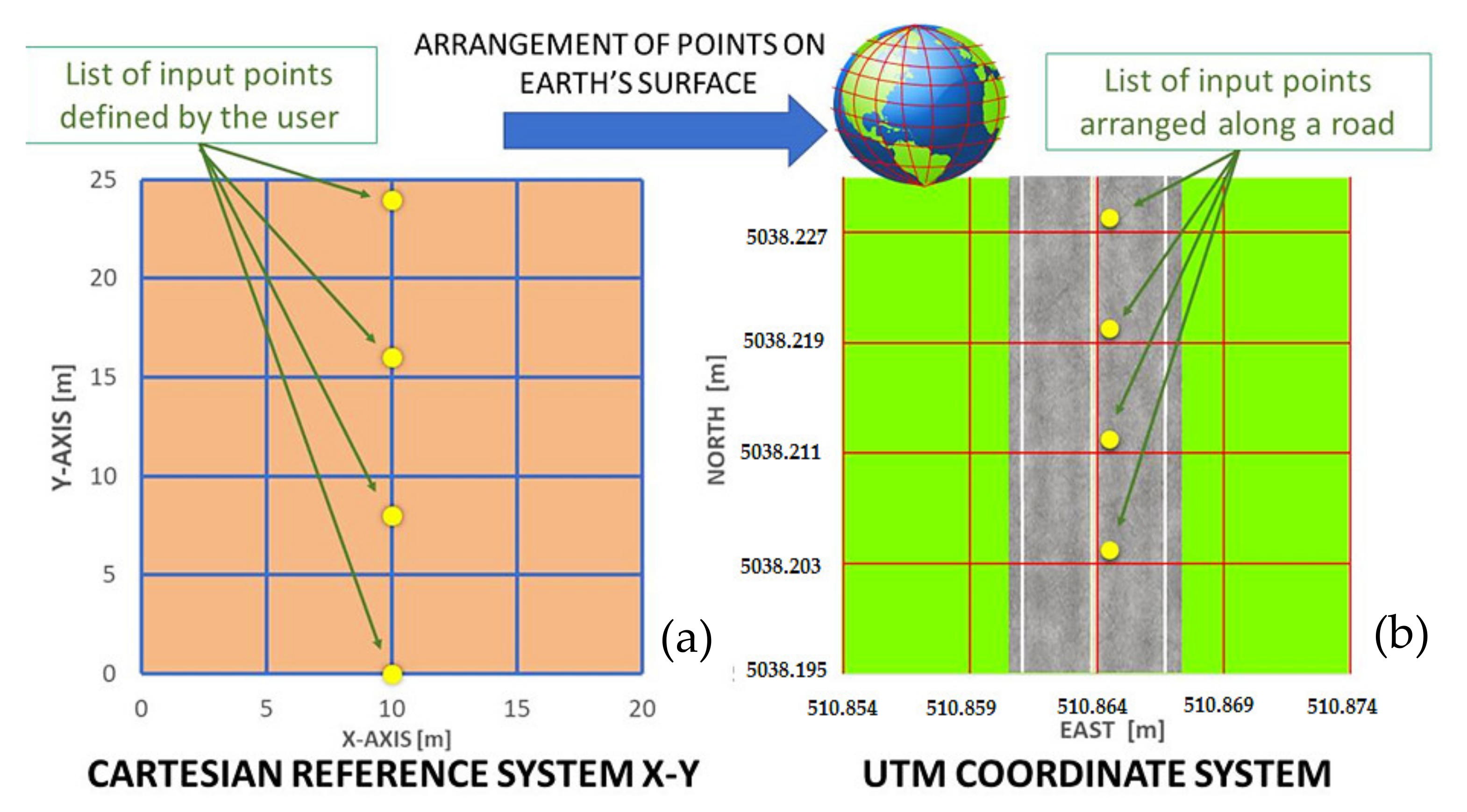
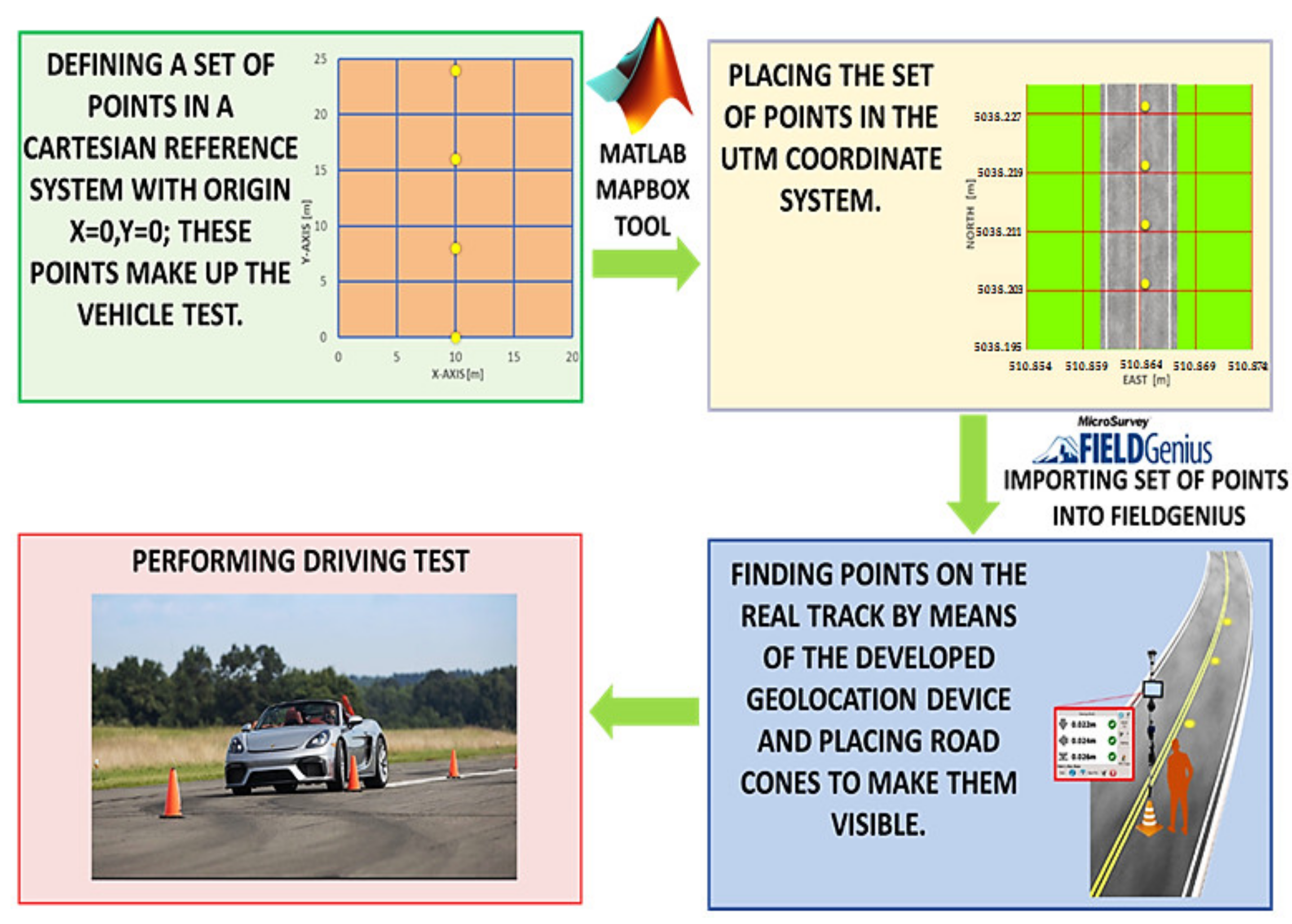
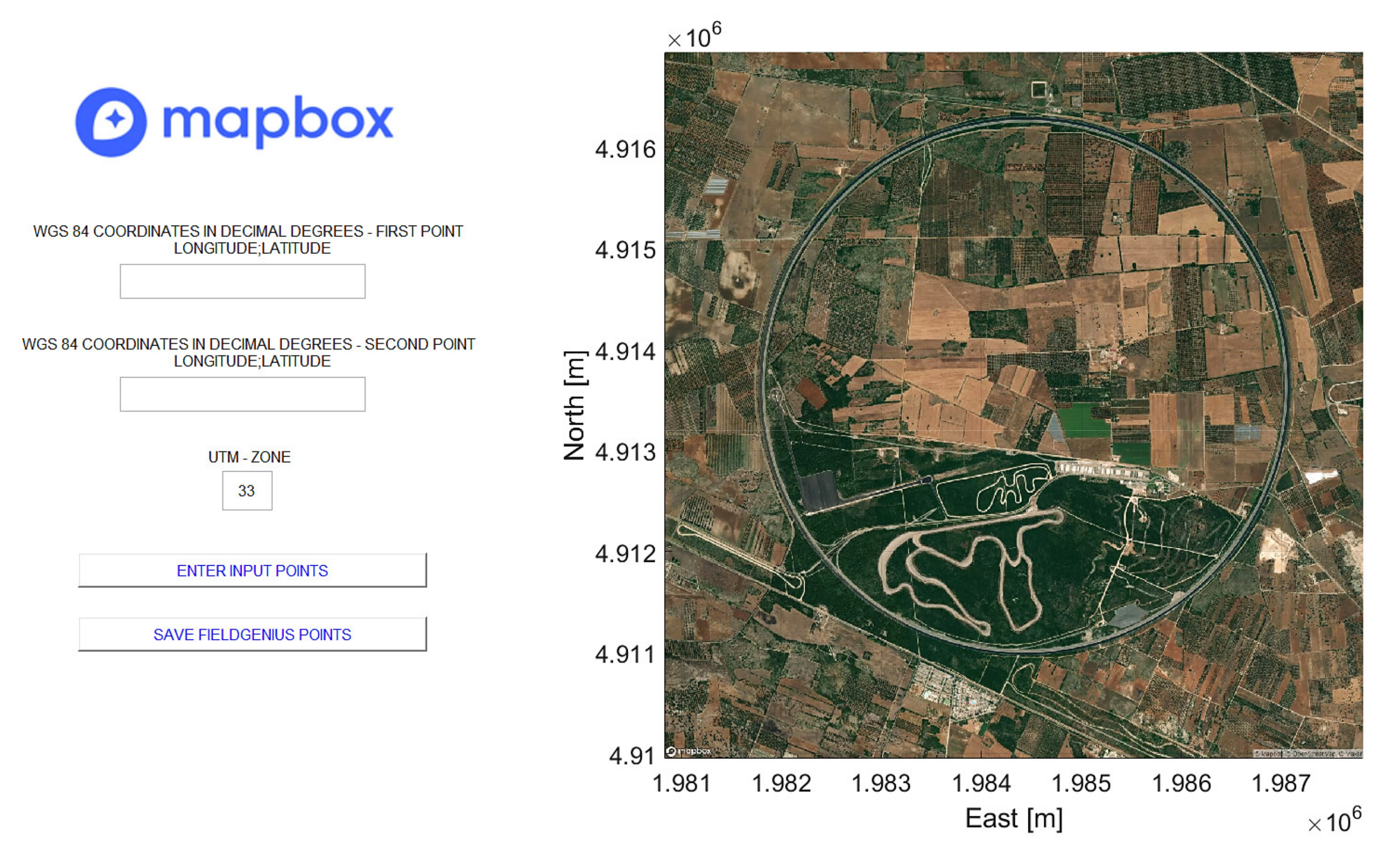
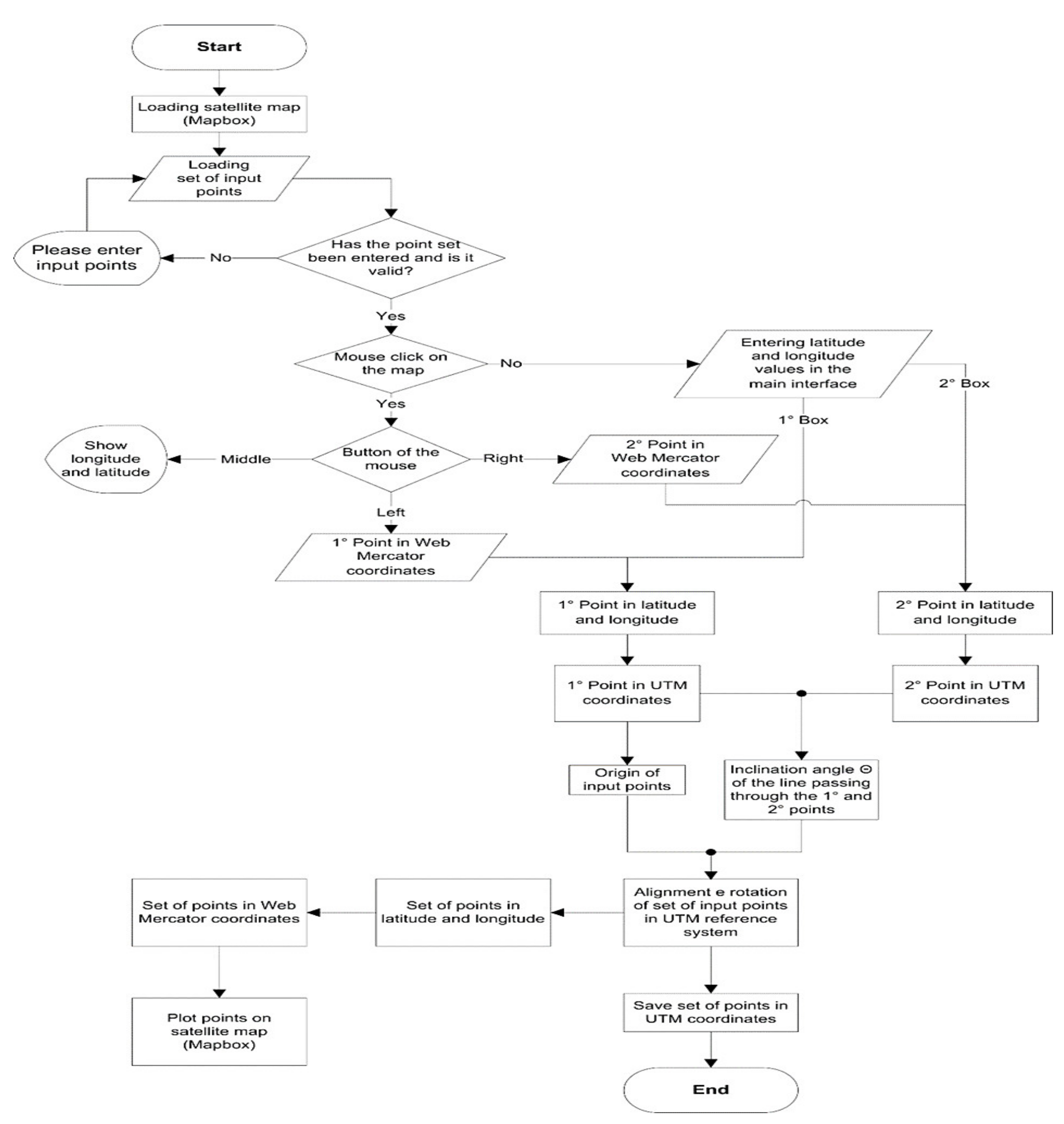
2.2. Development of the Matlab Tool for Placing a Set of Points in an Earth Reference System
- -
- Typing the WGS 84 coordinates (latitude and longitude) of the two points.
- -
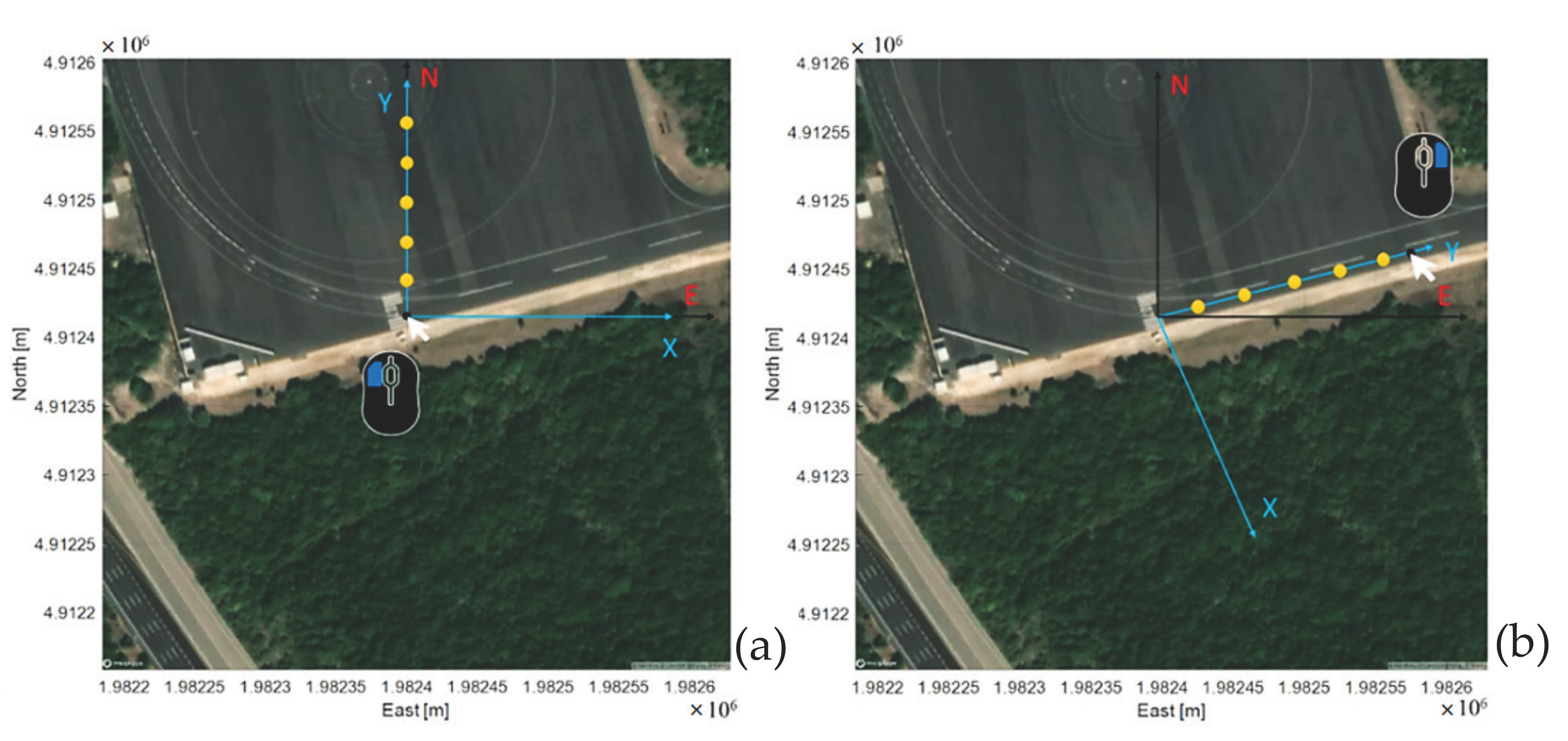
- Choosing two satellite map points by clicking with left/right buttons of the mouse, taking as reference some visible elements of the satellite image (road signs or trees).
3. Results
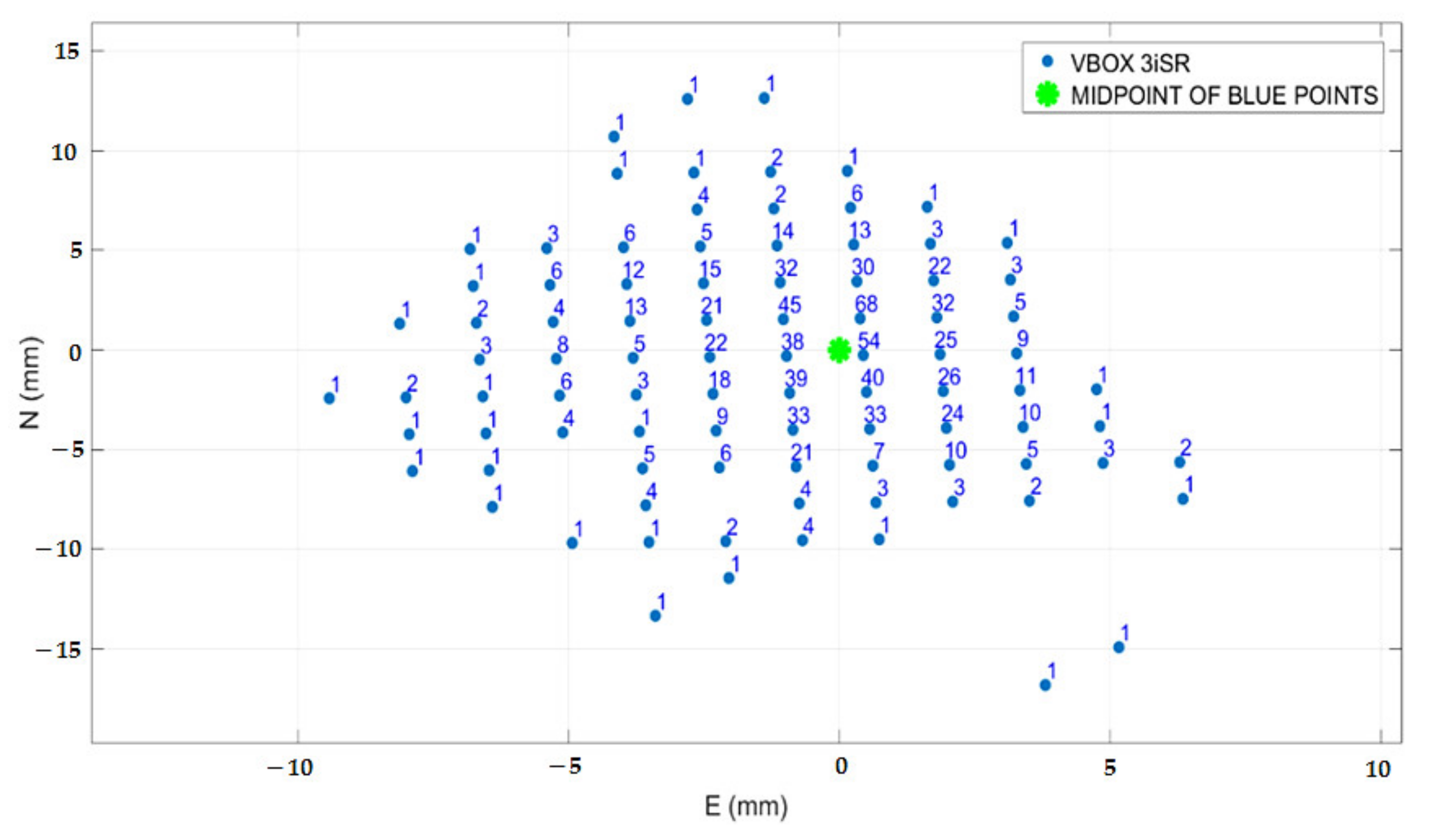
3.1. Experimental Results of Tests Performed on VBOX 3ISR INS with RLACS156 Antenna
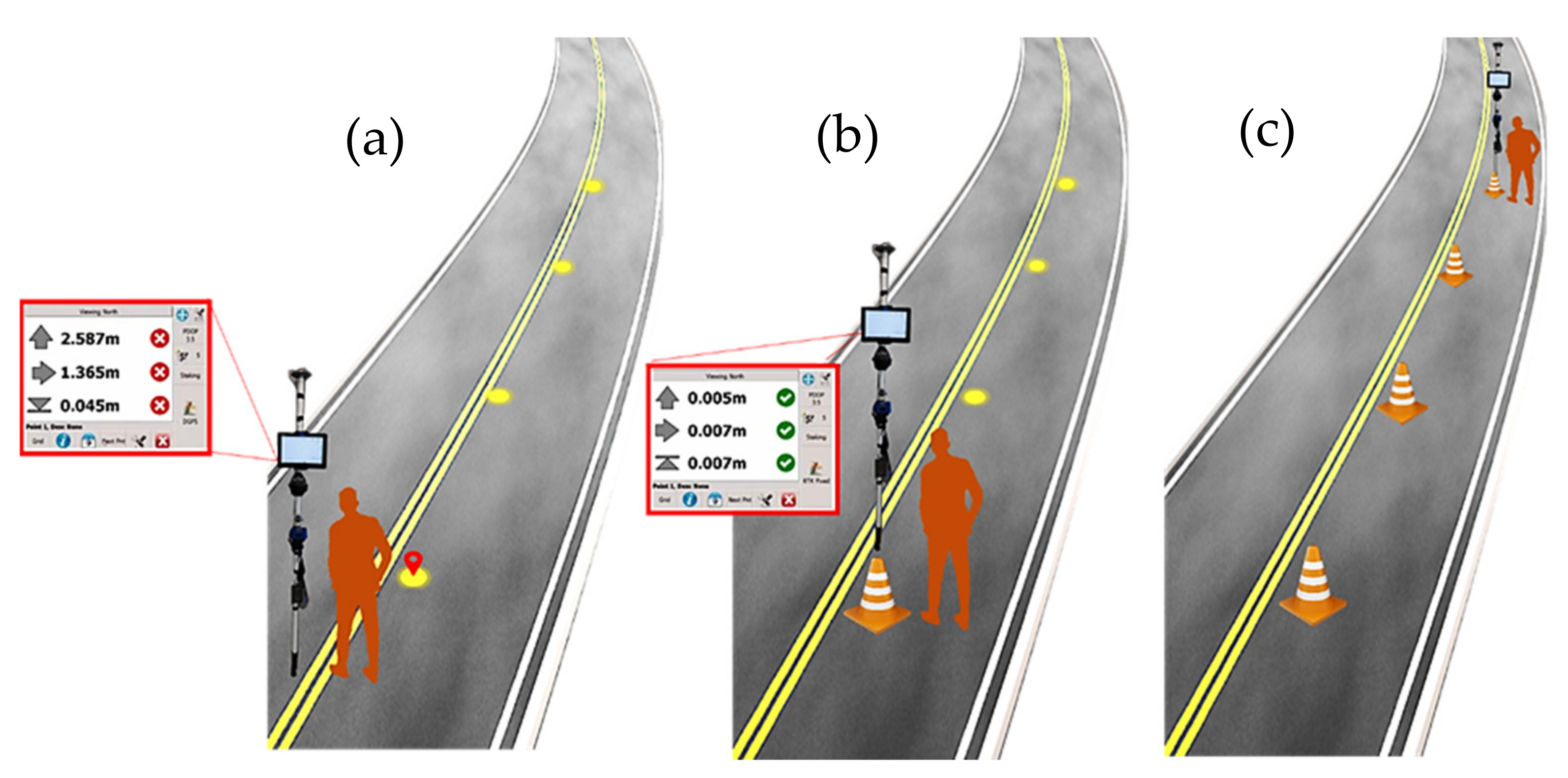
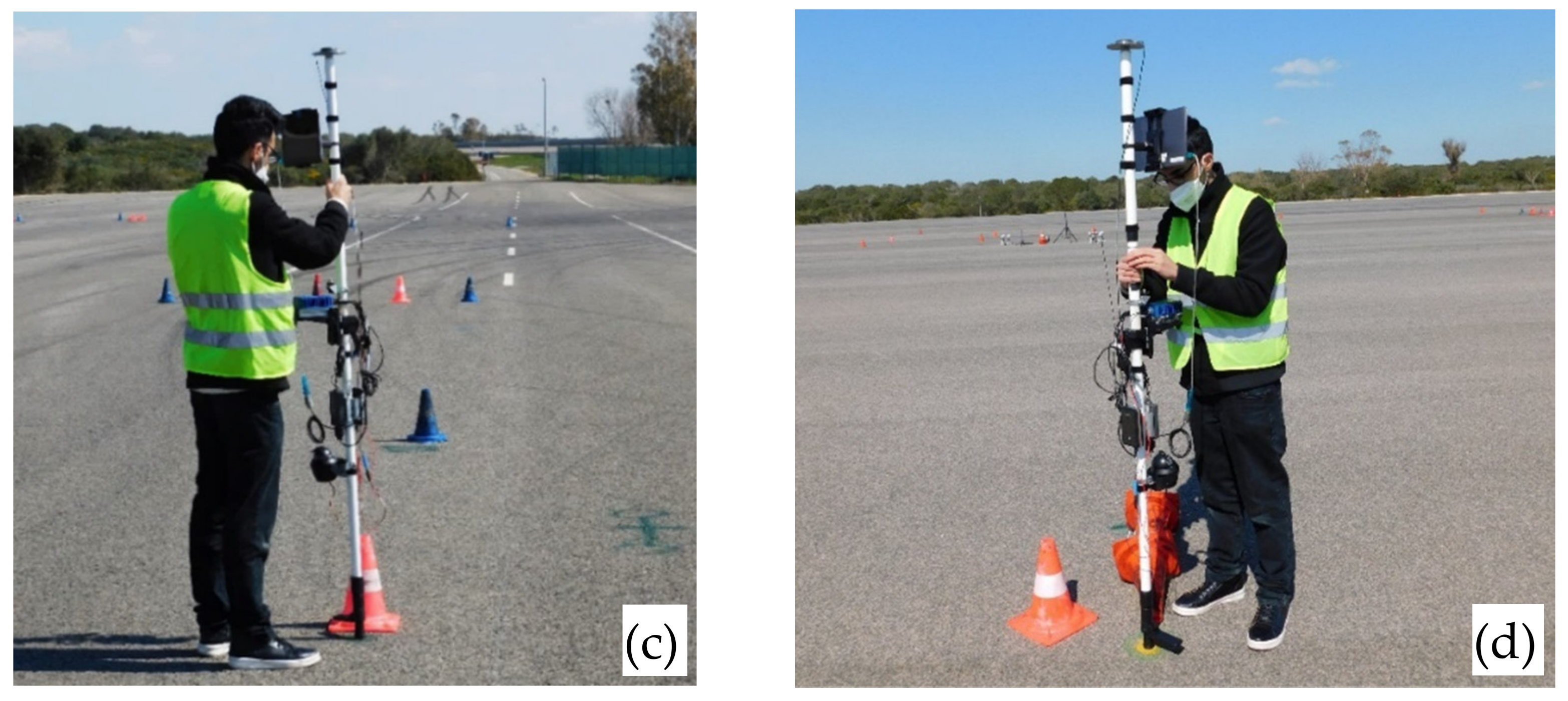
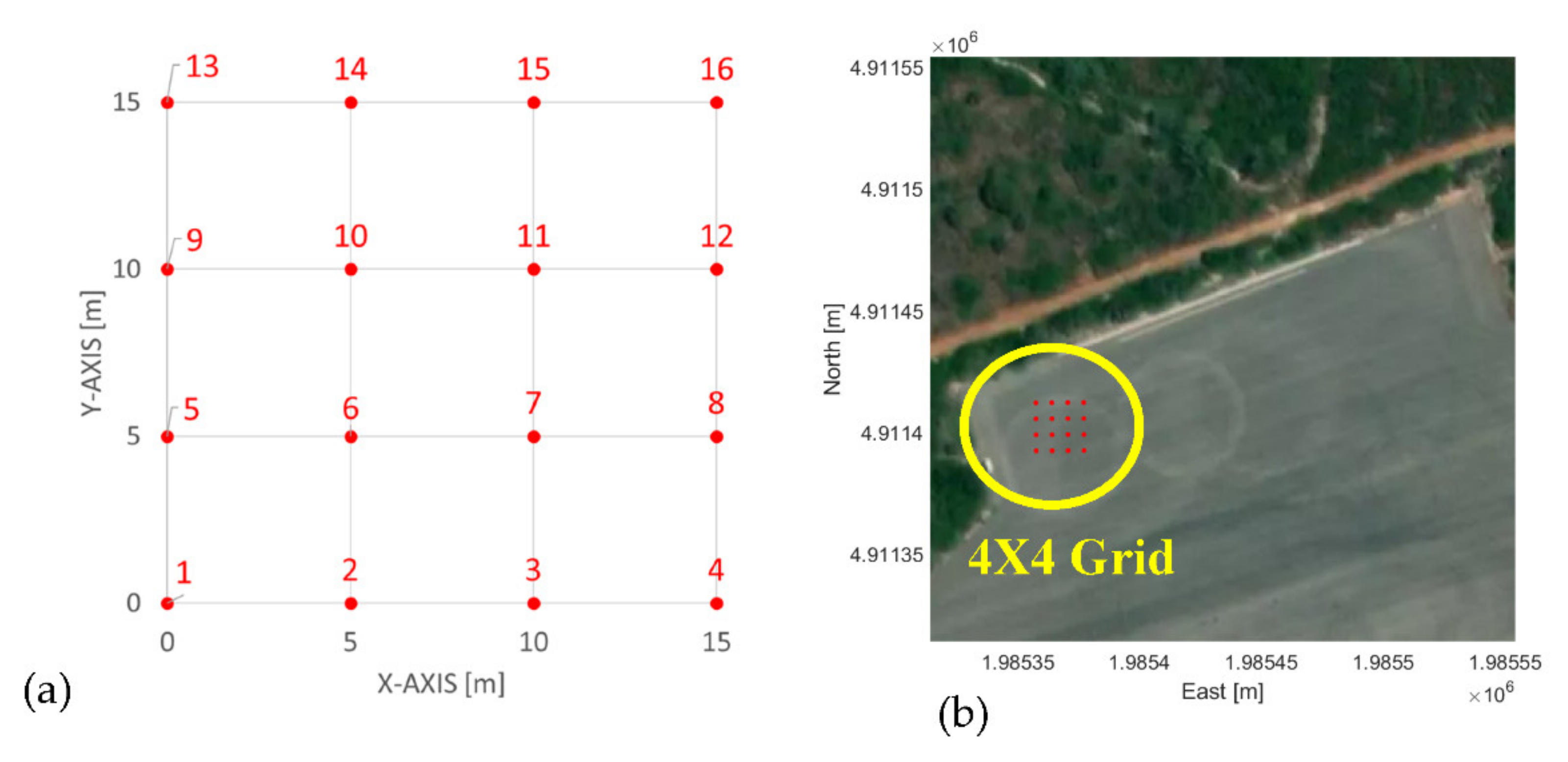
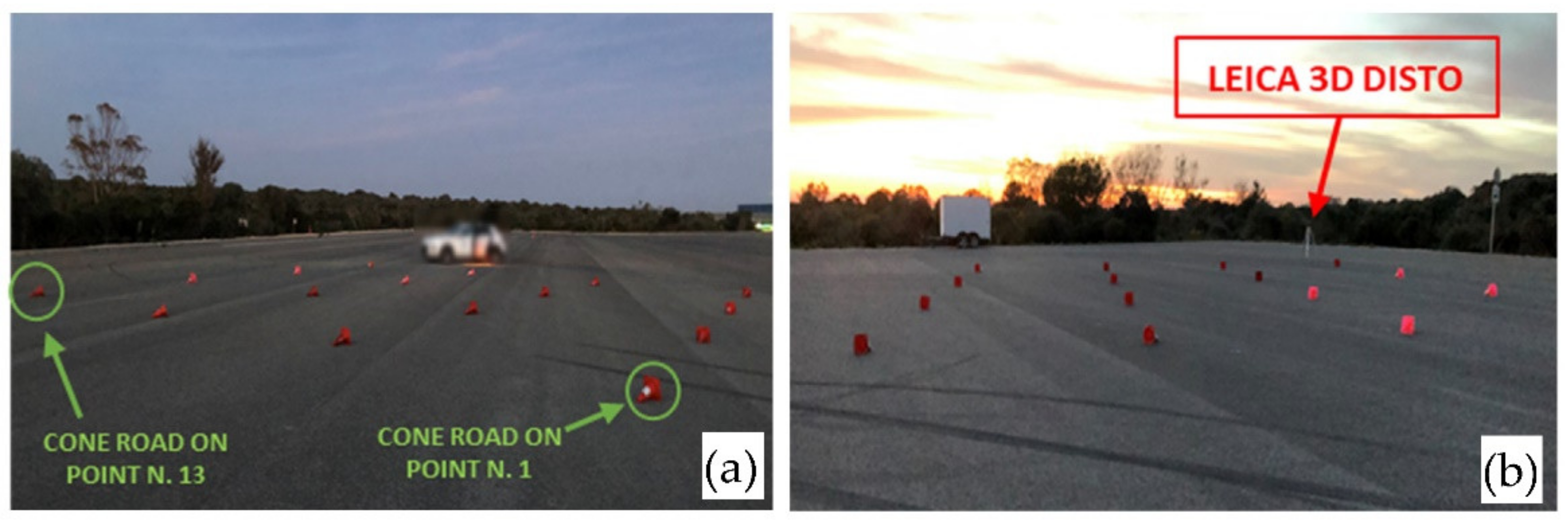
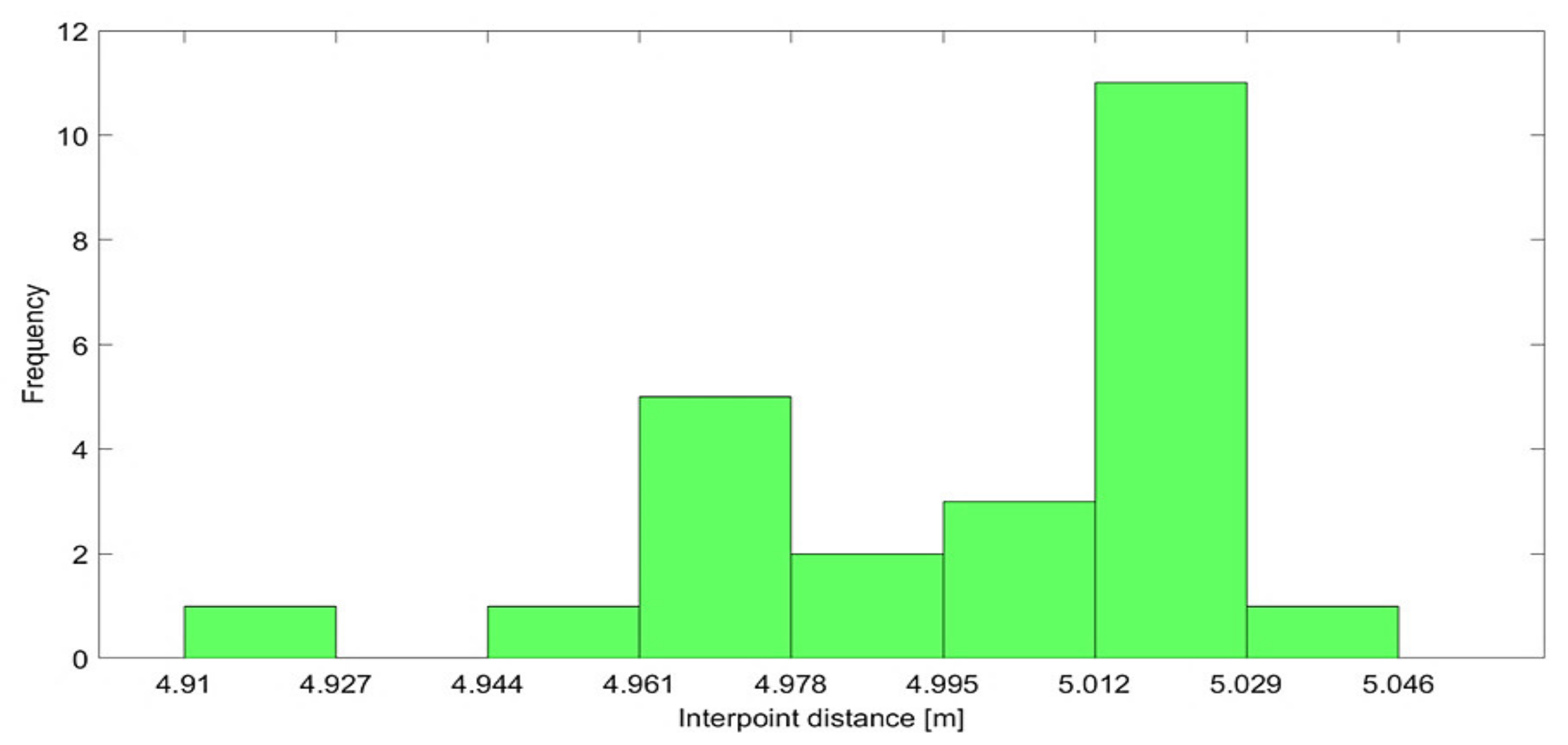
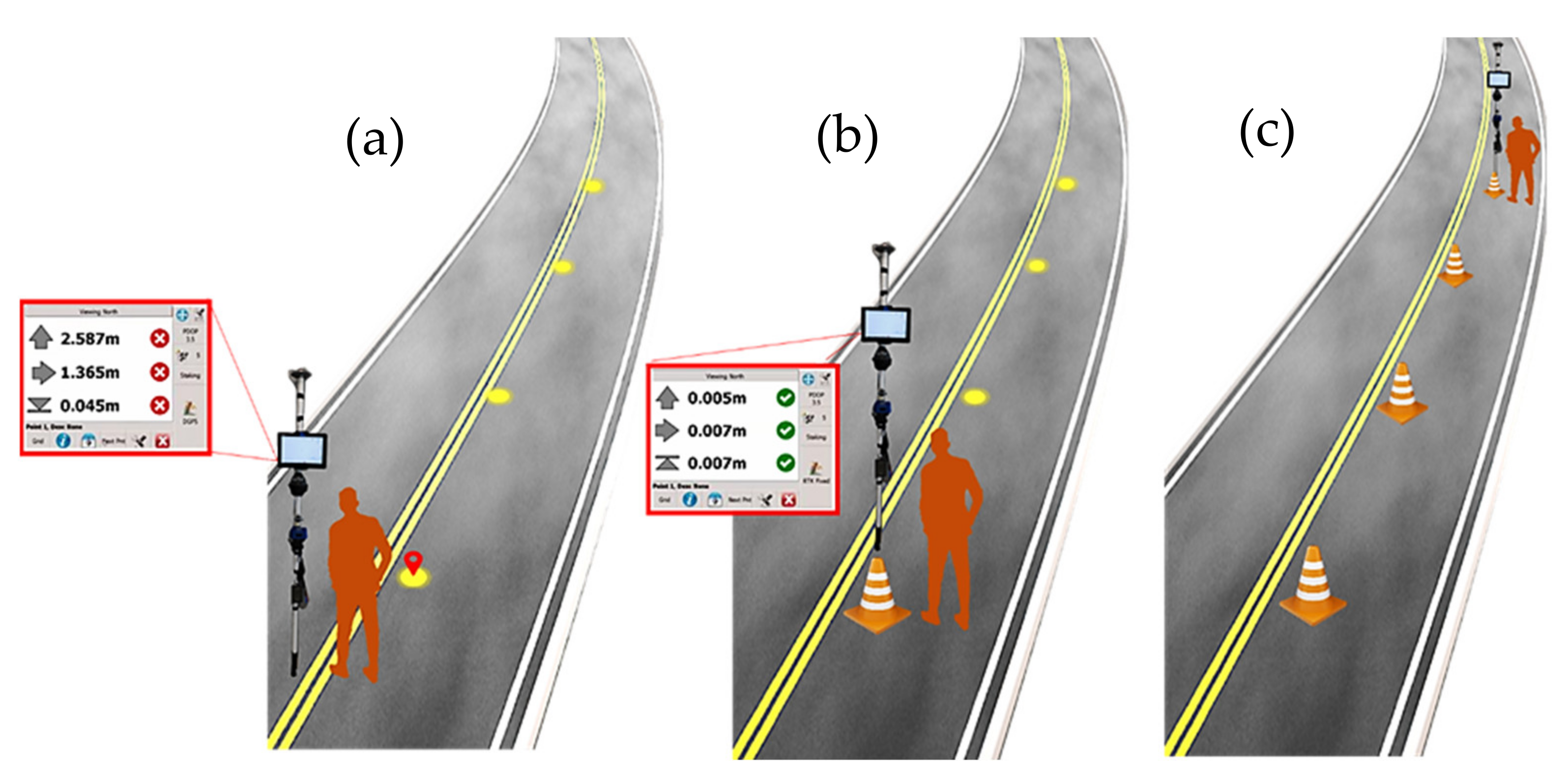
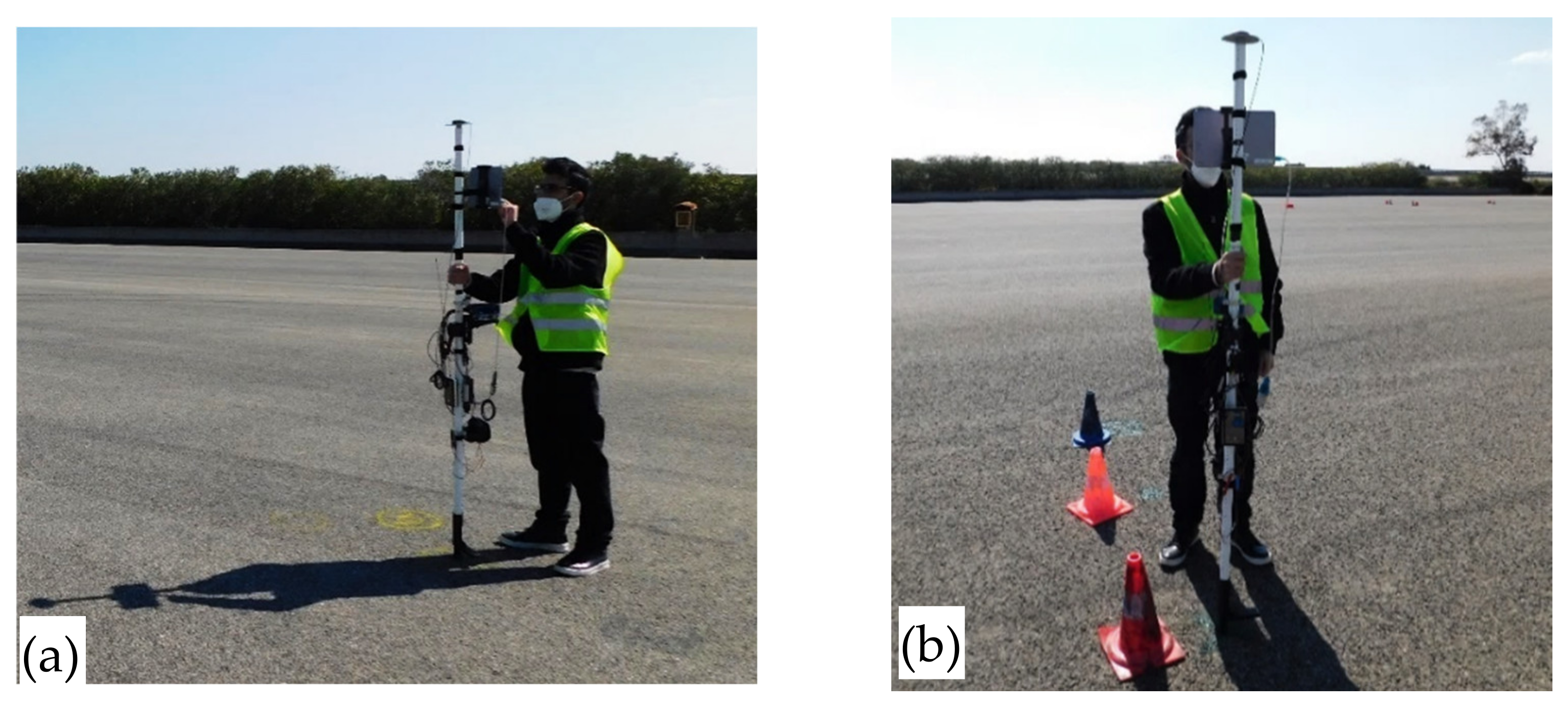
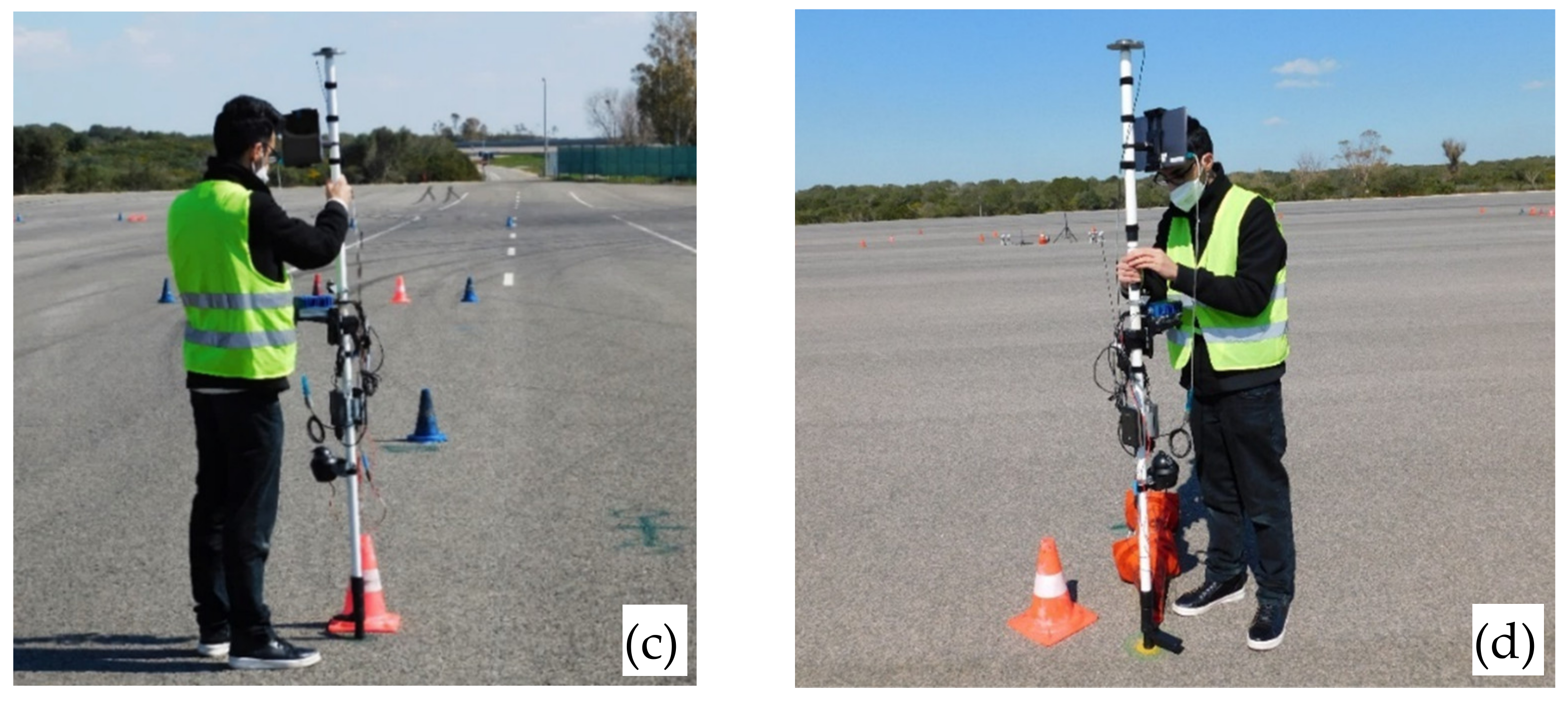
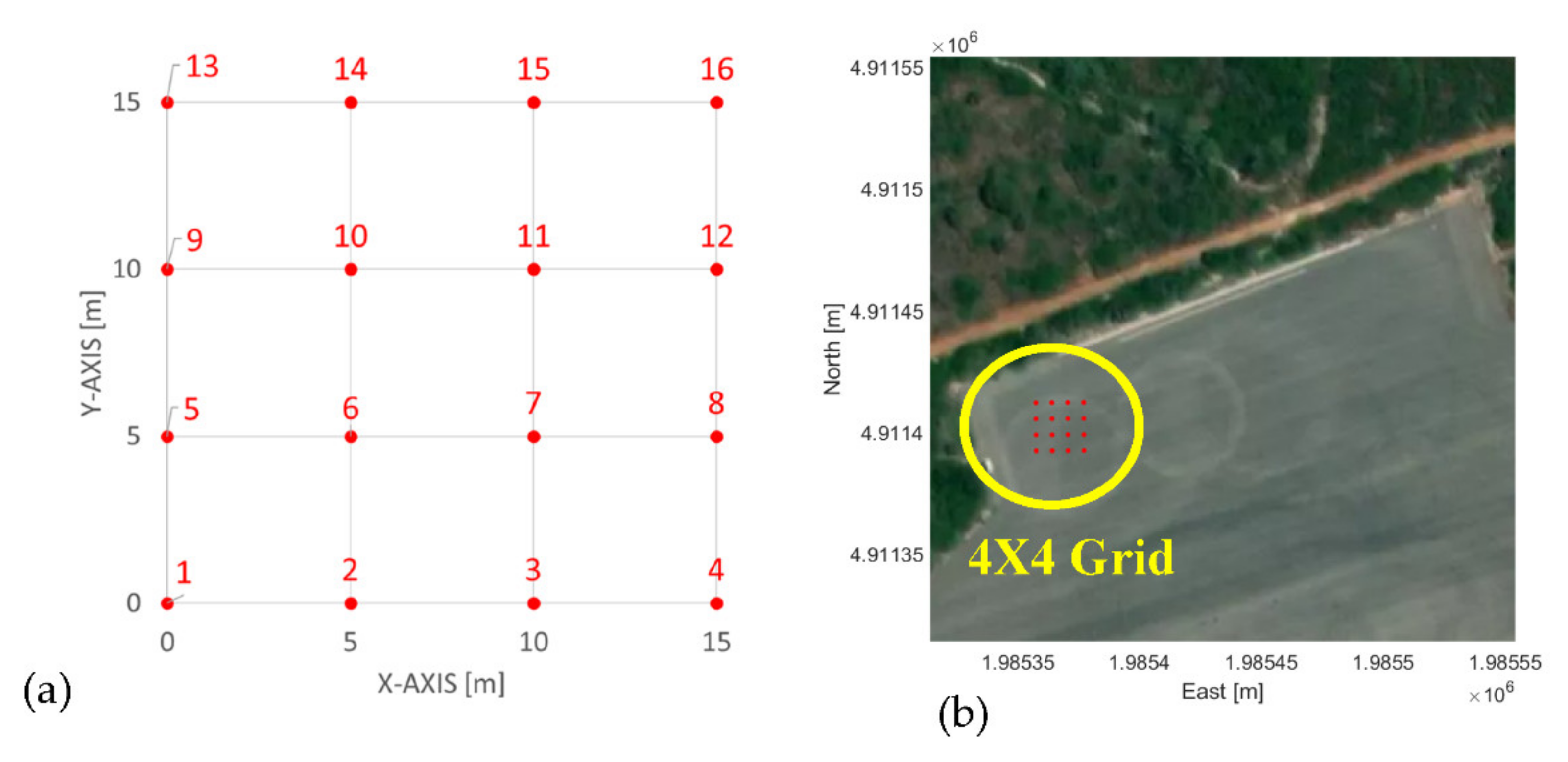
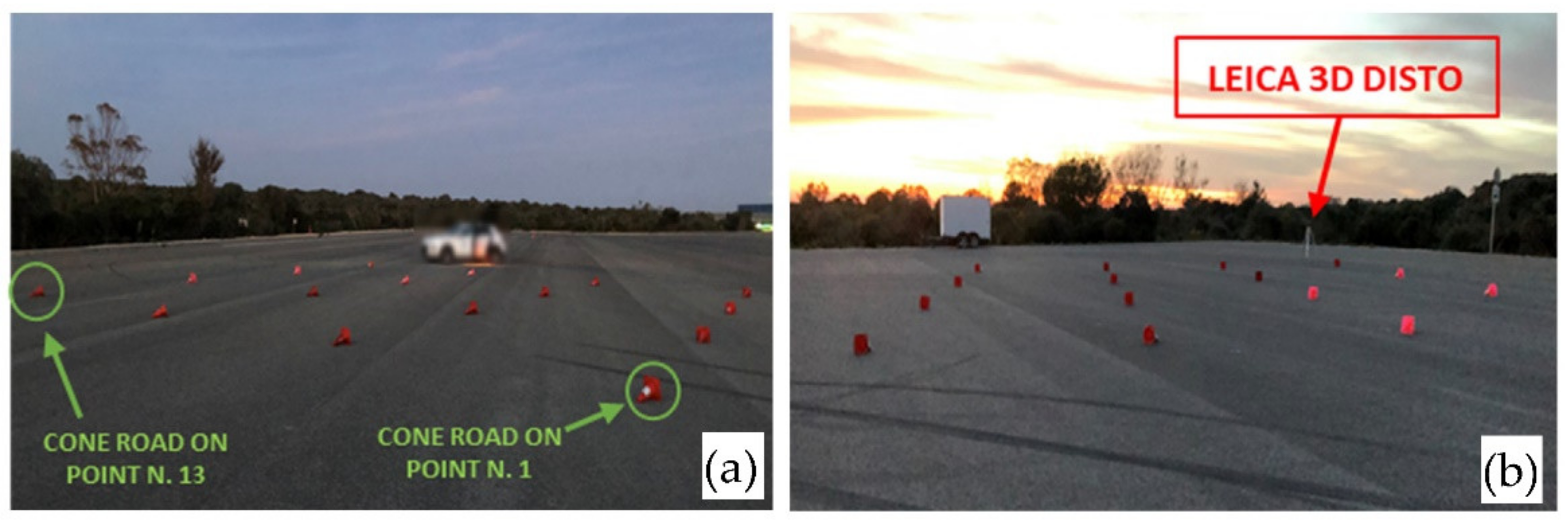
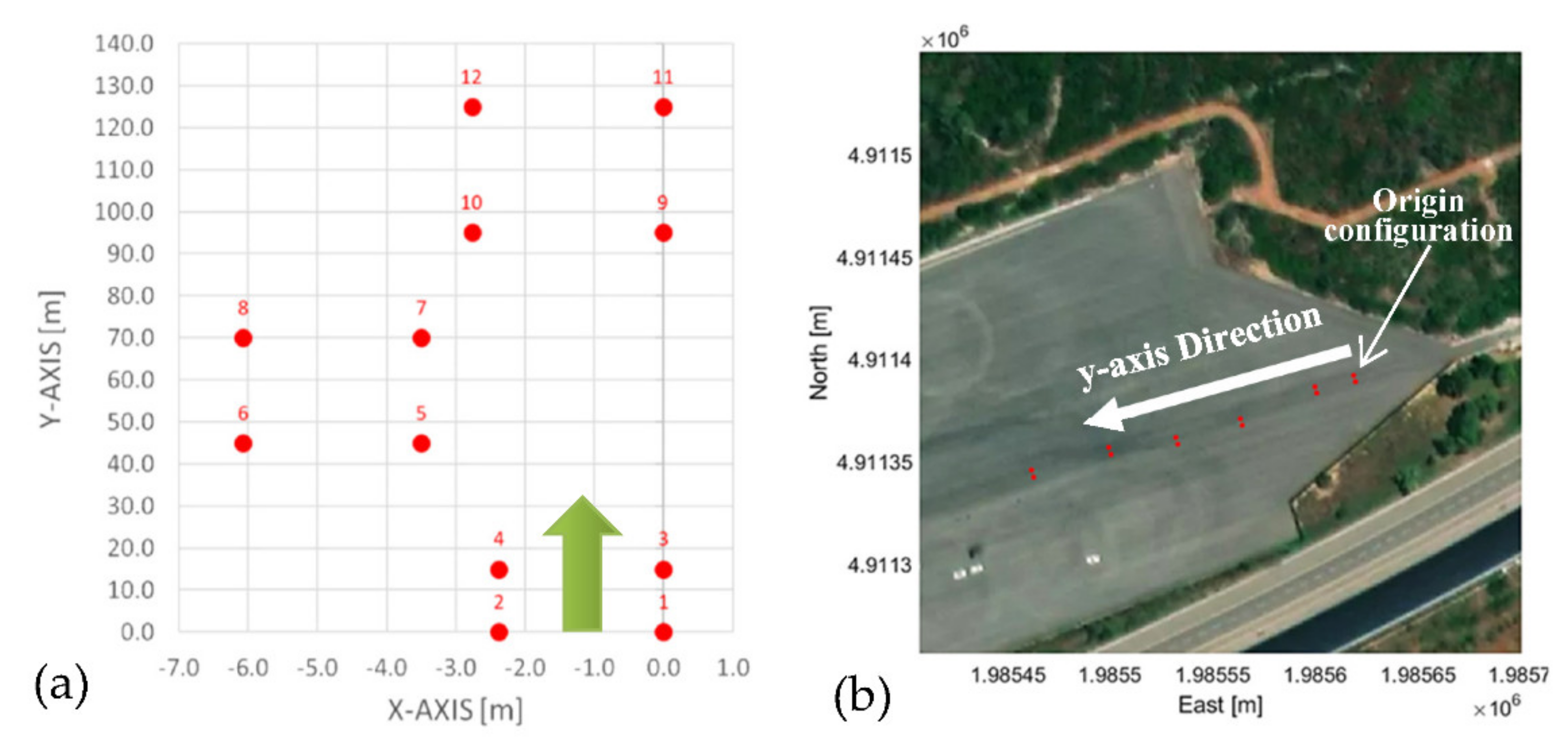
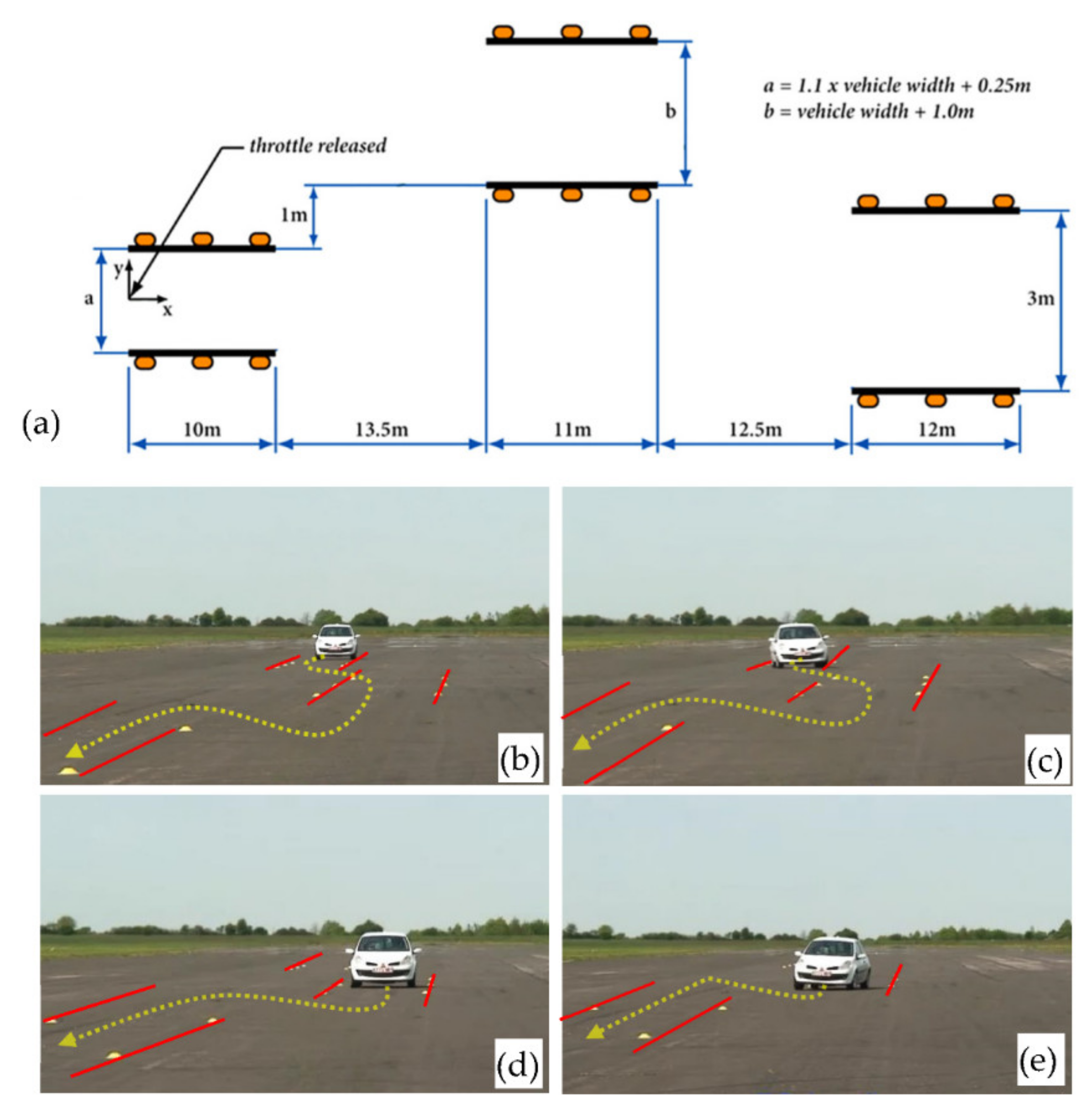
3.2. Automotive Test Preparation on the Testing Track through the Designed Stake-out System
- -
- Inaccuracies of VBOX 3iSR INS and bubble level of the geolocation device.
- -
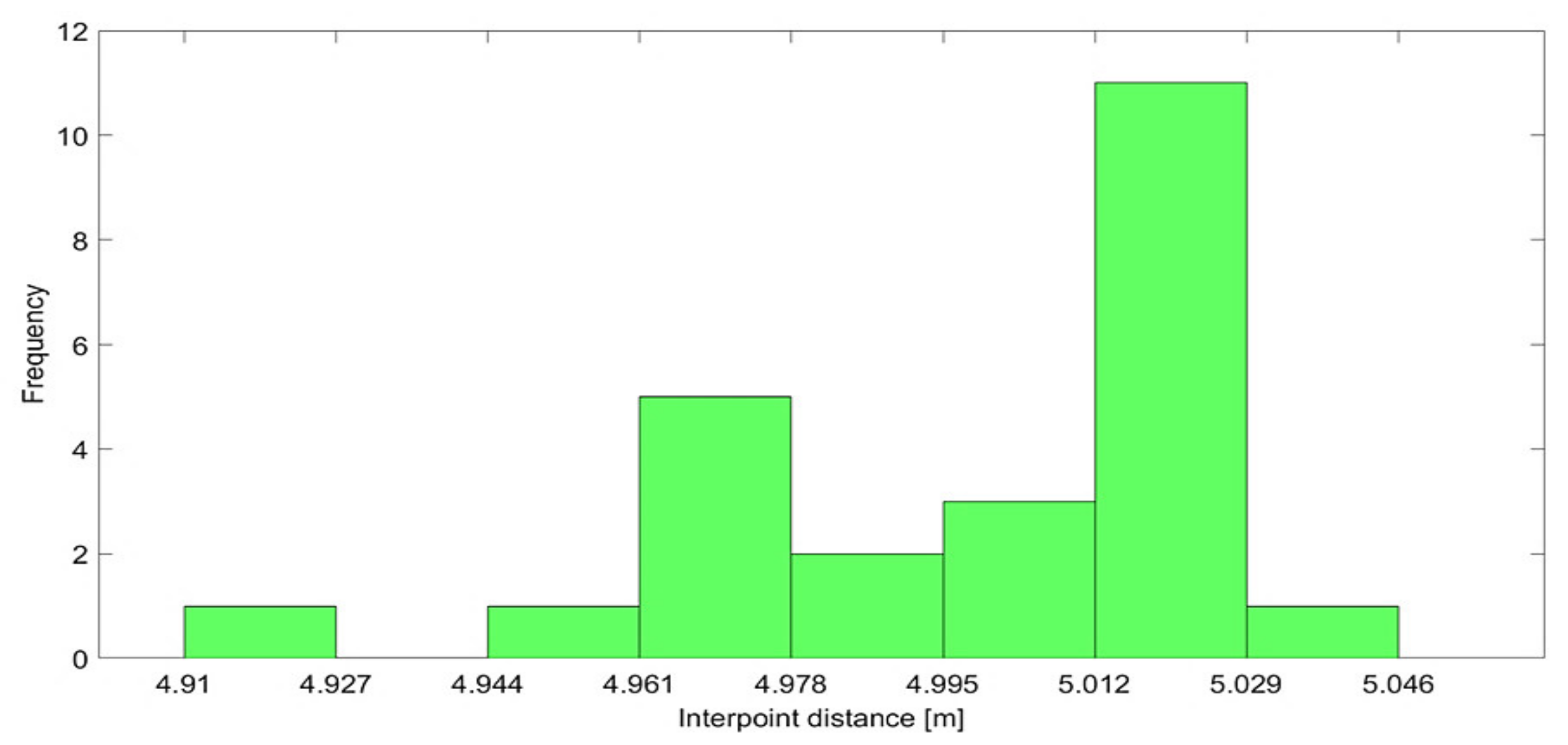
- Distance alterations due to UTM projection.
- -
- Distance error for i-th point: the difference between the nominal distance and that measured by the Leica 3D Disto sensor, both from the point n. 1 (origin).
- -
- Percentage distance error for i-th point: the ratio between the distance error and the nominal distance from the point n. 1 (origin).
- -
- Angular error: the difference between the nominal θ angle (formed by the y-axis and line passing through the points 1 and i-th), measured by the Leica 3D Disto sensor.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
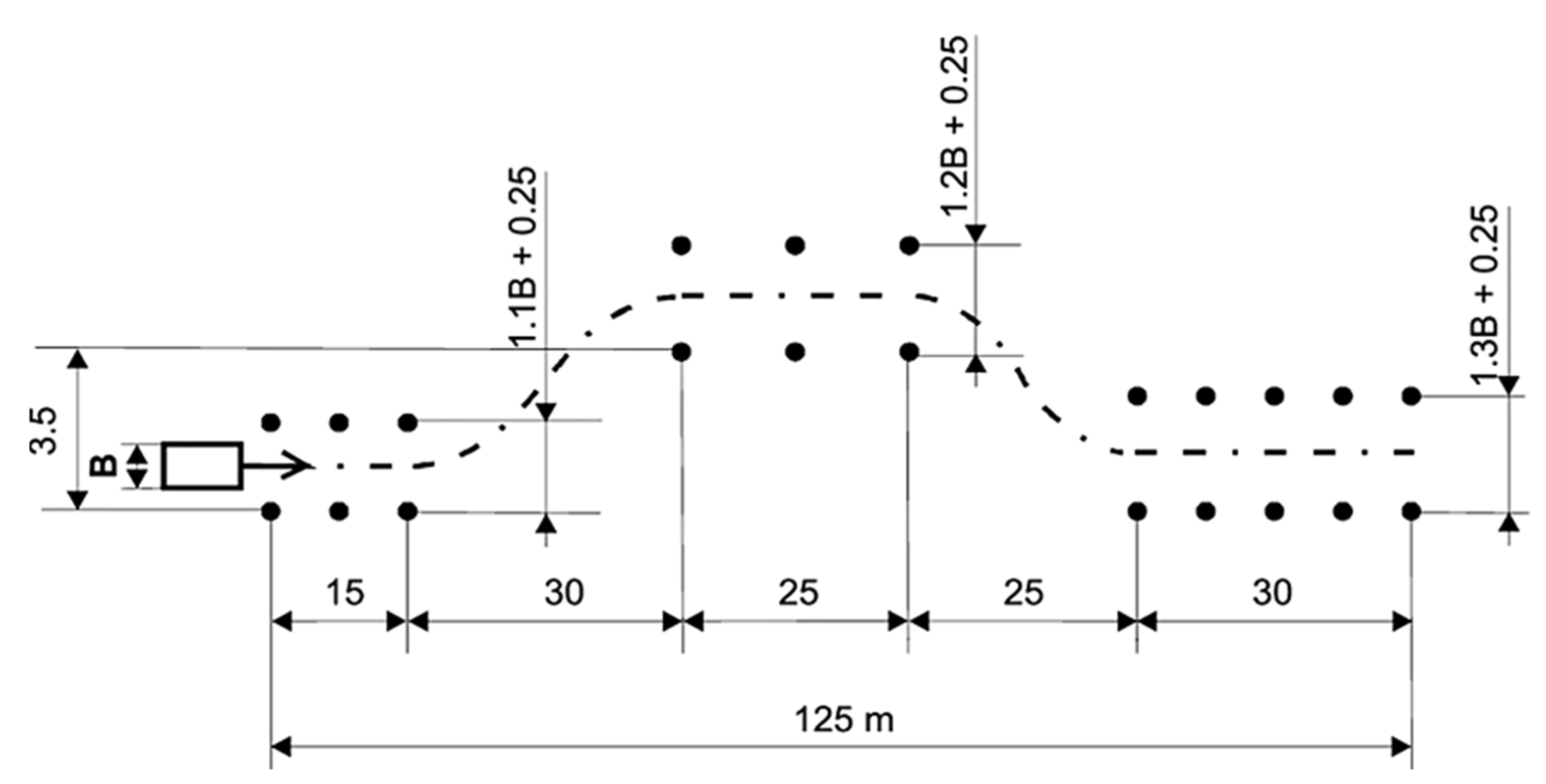
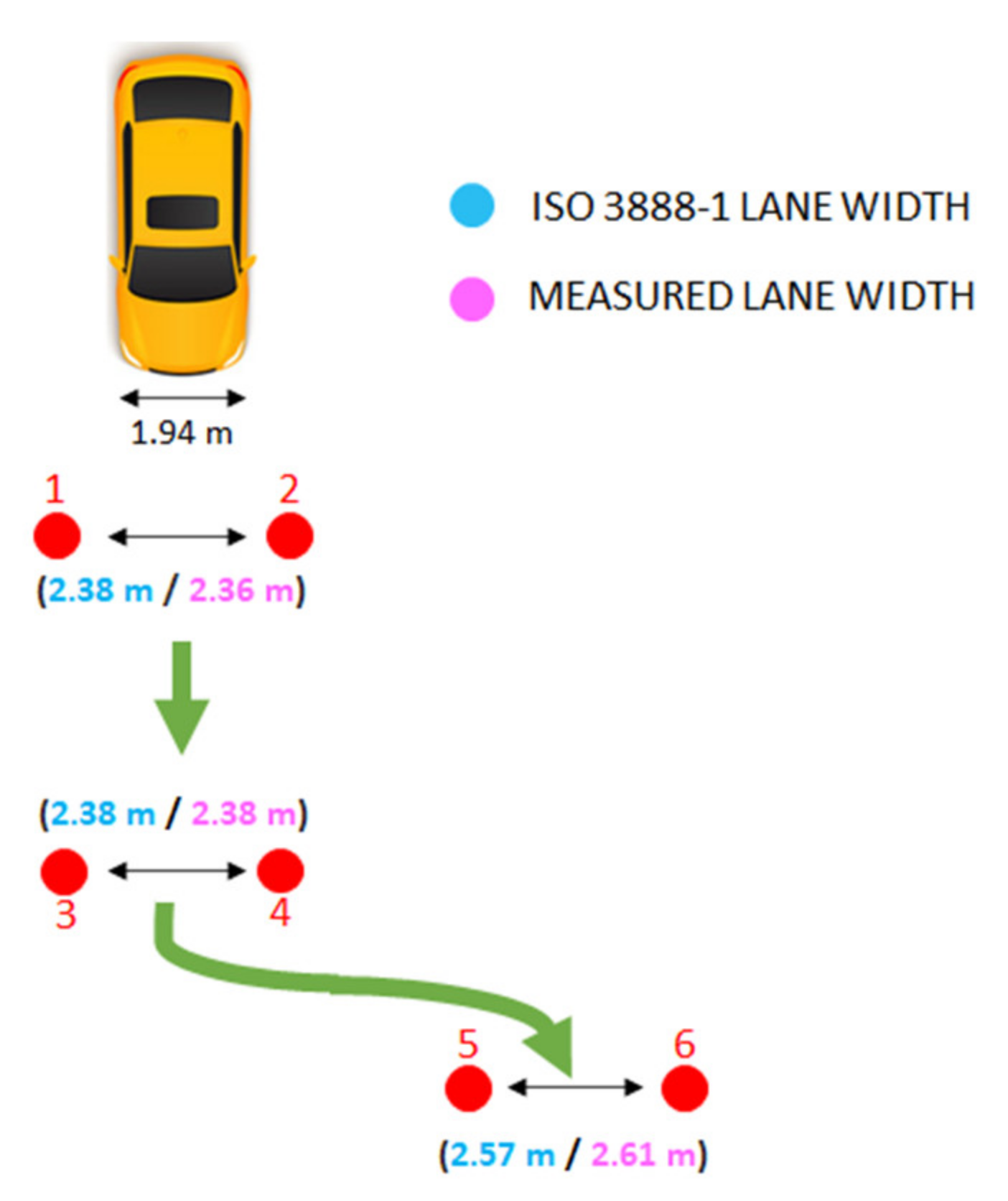
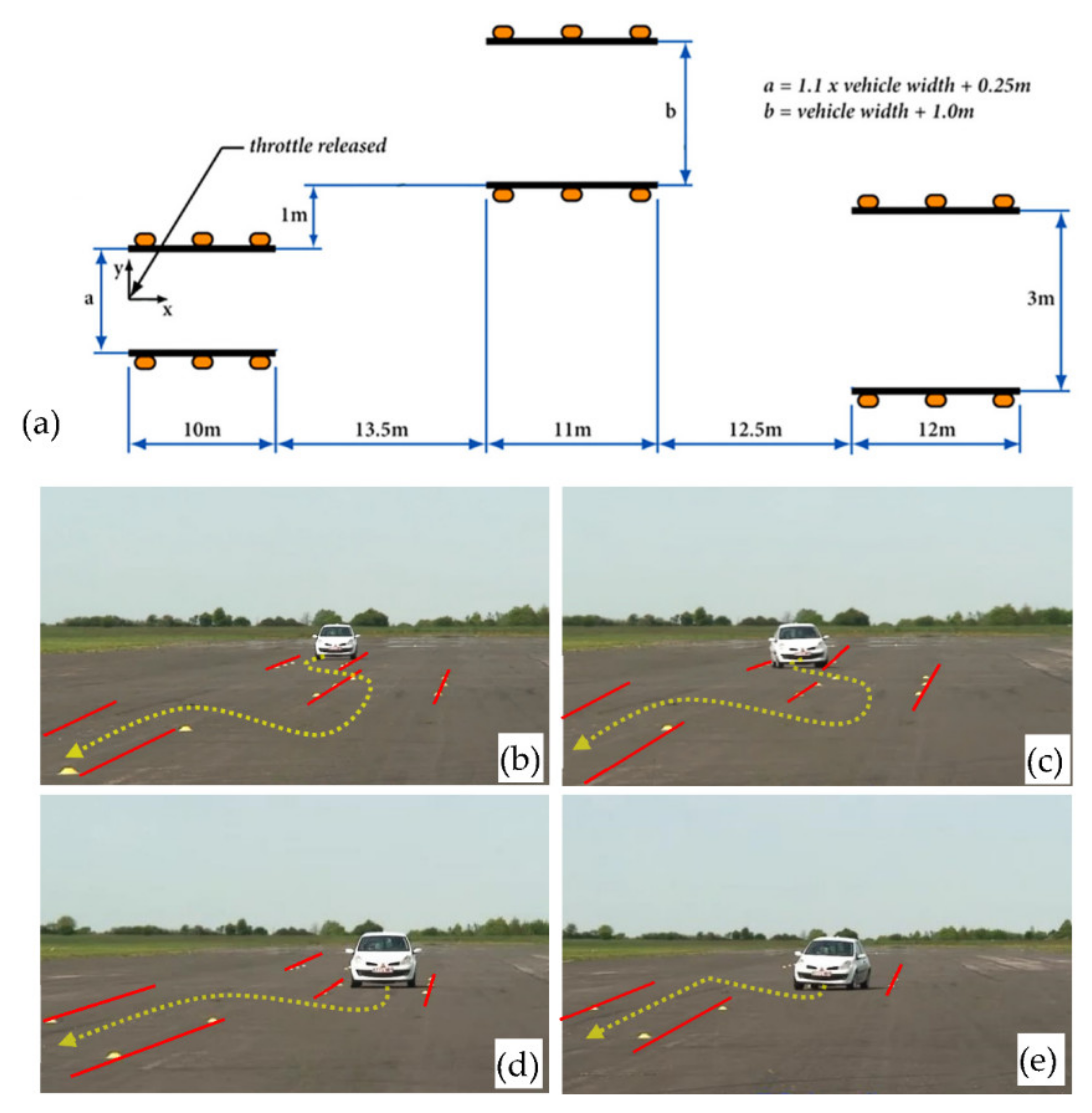
- ISO 3888-1:2018 Standard. Passenger Cars—Test Track for a Severe Lane-Change Manoeuvre—Part 1: Double Lane-Change. Available online: https://www.iso.org/standard/67973.html (accessed on 4 March 2021).
- Reński, A. Identification of Driver Model Parameters. Int. J. Occup. Saf. Ergon. 2001, 7, 79–92. [Google Scholar] [CrossRef] [Green Version]
- Limroth, J. Real-Time Vehicle Parameter Estimation and Adaptive Stability Control. All Dissertations. Number: 494. Clemson University. 2009. Available online: https://tigerprints.clemson.edu/all_dissertations/494 (accessed on 2 April 2021).
- Sun, Q.; Xia, J.C.; Foster, J.; Falkmer, T.; Lee, H. Pursuing Precise Vehicle Movement Trajectory in Urban Residential Area Using Multi-GNSS RTK Tracking. Transp. Res. Procedia 2017, 25, 2356–2372. [Google Scholar] [CrossRef]
- Catania, P.; Comparetti, A.; Febo, P.; Morello, G.; Orlando, S.; Roma, E.; Vallone, M. Positioning Accuracy Comparison of GNSS Receivers Used for Mapping and Guidance of Agricultural Machines. Agronomy 2020, 10, 924. [Google Scholar] [CrossRef]
- Niu, Z.; Nie, P.; Tao, L.; Sun, J.; Zhu, B. RTK with the Assistance of an IMU-Based Pedestrian Navigation Algorithm for Smartphones. Sensors 2019, 19, 3228. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Visconti, P.; De Fazio, R.; Costantini, P.; Miccoli, S.; Cafagna, D. Arduino-Based Solution for In-Car-Abandoned Infants’ Detection Remotely Managed by Smartphone Application. J. Commun. Softw. Syst. 2019, 15, 89–100. [Google Scholar] [CrossRef] [Green Version]
- Omae, M.; Fujioka, T.; Hashimoto, N.; Shimizu, H. The Application of RTK-GPS and Steer-by-Wire Technology to tHE Automatic Driving of Vehicles and an Evaluation of Driver Behavior. IATSS Res. 2006, 30, 29–38. [Google Scholar] [CrossRef] [Green Version]
- Han, J.-H.; Park, C.-H.; Park, Y.-J.; Kwon, J.H. Preliminary Results of the Development of a Single-Frequency GNSS RTK-Based Autonomous Driving System for a Speed Sprayer. J. Sensors 2019, 2019, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Saponara, S. Real-time kinematics for accurate geolocalization of images in telerobotic applications. Real-Time Image Video Process. 2018, 10670, 106700J. [Google Scholar] [CrossRef]
- Moreno, H.; Valero, C.; Bengochea-Guevara, J.M.; Ribeiro, Á.; Garrido-Izard, M.; Andújar, D. On-Ground Vineyard Reconstruction Using a LiDAR-Based Automated System. Sensors 2020, 20, 1102. [Google Scholar] [CrossRef] [Green Version]
- Muhammad, B.; Prasad, R.; Nisi, M.; Menichetti, F.; Cianca, E.; Mennella, A.; Gagliarde, G.; Marenchino, D. Maintenance of the Photovolatic PlantsUsing UAV Equipped with Low-costGNSS RTK Receiver. J. Commun. Navig. Sens. Serv. (CONASENSE) 2018, 2017, 25–48. [Google Scholar] [CrossRef] [Green Version]
- Kulsinskas, A.; Durdevic, P.; Ortiz-Arroyo, D. Internal Wind Turbine Blade Inspections Using UAVs: Analysis and Design Issues. Energies 2021, 14, 294. [Google Scholar] [CrossRef]
- Sudevan, V.; Shukla, A.; Karki, H. Autonomous Tracking and Tagging of Buried Pipelines Based on Pipe-Locator Data. In Proceedings of the International Conference on Diagnostics of Structures an Components using Metal Magnetic Memory Method; Ether NDE: Prague, Czech Republic, 2019; pp. 1–8. [Google Scholar]
- Campos, D.F.; Matos, A.; Pinto, A.M. Multi-domain inspection of offshore wind farms using an autonomous surface vehicle. SN Appl. Sci. 2021, 3, 1–19. [Google Scholar] [CrossRef]
- Cantieri, A.; Ferraz, M.; Szekir, G.; Teixeira, M.A.; Lima, J.; Oliveira, A.S.; Wehrmeister, M.A. Cooperative UAV–UGV Autonomous Power Pylon Inspection: An Investigation of Cooperative Outdoor Vehicle Positioning Architecture. Sensors 2020, 20, 6384. [Google Scholar] [CrossRef]
- Racelogic Company, VBOX 3iSR Datasheet. Available online: https://www.racelogic.co.uk/_downloads/vbox/Datasheets/Data_Loggers/RLVB3iS_Data.pdf (accessed on 28 January 2021).
- Genesys (Sensor & Navigation Solution) Company. Genesys Outdoor Base Station Datasheet. Available online: https://www.genesys-offenburg.de/en/products/dgnss-correction-data/gps-outdoor-base-station/ (accessed on 28 January 2021).
- Williams, C.E. A Comparison of Circular Error Probable Estimators for Small Samples. Master’s Thesis, DTIC Document. 1997. Available online: https://apps.dtic.mil/sti/citations/ADA324337 (accessed on 1 March 2021).
- Liu, B.; Duan, X.; Yan, L. A Novel Bayesian Method for Calculating Circular Error Probability with Systematic-Biased Prior Information. Math. Probl. Eng. 2018, 2018, 1–9. [Google Scholar] [CrossRef]
- RS Pro Company. Bubble Level RS Pro Datasheet. Available online: https://docs.rs-online.com/8f60/0900766b81584b7a.pdf (accessed on 10 January 2021).
- XTPower Company. Power Bank XTPower MP-10000 Manual. Available online: https://www.xtpower.de/mediafiles/Anleitungen/Anleitung%20Powerbank%20MP-10000.pdf (accessed on 10 January 2021).
- De Fazio, R.; Cafagna, D.; Marcuccio, G.; Visconti, P. Limitations and Characterization of Energy Storage Devices for Harvesting Applications. Energies 2020, 13, 783. [Google Scholar] [CrossRef] [Green Version]
- Racelogic Company. Antenna RLACS156 Datasheet. Available online: https://racelogic.support/03LabSat_GPS_Simulators/Knowledge_Base/General_Information/LabSat_Antenna_Matrix#RLACS156 (accessed on 10 January 2021).
- Zhang, L.; Schwieger, V. Investigation of a L1-optimized choke ring ground plane for a low-cost GPS receiver-system. J. Appl. Geodesy 2017, 12, 55–64. [Google Scholar] [CrossRef]
- Kunysz, W. High Performance GPS Pinwheel Antenna; White Paper; NovAtel Inc. 2000, pp. 1–6. Available online: https://hexagondownloads.blob.core.windows.net/public/Novatel/assets/Documents/Papers/gps_pinwheel_ant/gps_pinwheel_ant.pdf (accessed on 25 March 2021).
- Teunissen, P.J.G.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin, Germany, 2017; ISBN 978-3-319-42926-7. [Google Scholar] [CrossRef]
- Satel Company. Radio Modem Satel Satelline-Easy Datasheet. Available online: https://www.satel.com/wp-content/uploads/2020/11/SATELLINE-EASy_11_2020_small.pdf (accessed on 10 January 2021).
- Snyder, J.P. Map projections: A working manual. In Professional Paper; US Geological Survey: Reston, VA, USA, 1987. [Google Scholar]
- International Association of Oil & Gas Producers (IOGP). Publication 373-7-2: “Coordinate Conversions and Transformations including Formulas”, Geomatics Guidance Note Number 7, Part 2—September 2019. Available online: https://www.iogp.org/wp-content/uploads/2019/09/373-07-02.pdf (accessed on 25 March 2021).
- UTM—Universal Transversal Projection. Available online: http://geokov.com/education/utm.aspx#:~:text=The%20scale%20error%20within%20each,Mercator%20projections%20are%20conformal%20projections (accessed on 20 March 2021).
- Leica Company. Leica 3D Disto Datasheet. Available online: https://shop.leica-geosystems.com/sites/default/files/2020-05/3DD%20Technical%20Data%20Sheet%20-%20US%20Std%20V5.pdf (accessed on 5 March 2021).
- Leica Company. Leica 3D Disto Manual. Available online: https://shop.leica-geosystems.com/sites/default/files/2020-05/847903_Leica_3D_Disto_UM_V.6-1-0_en.pdf (accessed on 5 March 2021).
- Feng, Y.; Wang, J. GPS RTK Performance Characteristics and Analysis. J. Glob. Position. Syst. 2008, 7, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.-E. The Accuracy Analysis of Parcel Surveying by RTK-GPS and RTK-GPS/GLONASS. Spat. Inf. Res. 2006, 14, 211–221. [Google Scholar]
- Xu, Y.; Chen, W. Performance Analysis of GPS/BDS Dual/Triple-Frequency Network RTK in Urban Areas: A Case Study in Hong Kong. Sensors 2018, 18, 2437. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Manandhar, D.; Honda, K.; Murai, S. Accuracy assessment and improvement for level survey using real time kinematic (RTK) GPS. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 28 June–2 July 1999; IEEE: Piscataway, NJ, USA, 2002; Volume 2, pp. 882–884, IGARSS’99 (Cat. No.99CH36293). [Google Scholar]
- Roh, T.-H.; Seo, D.-J.; Lee, J.-C. An accuracy analysis for horizontal alignment of road by the kinematic GPS/GLONASS combination. KSCE J. Civ. Eng. 2003, 7, 73–79. [Google Scholar] [CrossRef]
- Reid, T.G.R.; Pervez, N.; Ibrahim, U.; Houts, S.E.; Pandey, G.; Alla, N.K.; Hsia, A. Standalone and RTK GNSS on 30,000 km of North American Highways. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; The Institute of Navigation: Manassas, VA, USA; pp. 2135–2158. [Google Scholar]
- Visconti, P.; Sbarro, B.; Primiceri, P.; de Fazio, R.; Lay-Ekuakille, A. Design and testing of electronic control system based on STM X-Nucleo board for detection and wireless transmission of sensors data applied to a single-seat Formula SAE car. Int. J. Electron. Telecommun. 2019, 65, 671–678. [Google Scholar] [CrossRef]
- RS Pro Company. Metric Measuring Wheel 10000 m ±1% Datasheet. Available online: https://it.rs-online.com/web/p/ruote-di-misurazione/1755055/?cm_mmc=IT-PLA-DS3A-_-google-_-PLA_IT_IT_Utensili_manuali_Whoop-_-(IT:Whoop!)+Ruote+di+misurazione-_-1755055&matchtype=&pla-328208572530&gclid=CjwKCAjw6fCCBhBNEiwAem5SO4T7zYy-NGNje5dSVPwB3Q_TOUeUTAiU-yPCvYiaQmivA7hNHafUFxoCDHAQAvD_BwE&gclsrc=aw.ds (accessed on 26 March 2021).
- Garosa Company. Metric Measuring Wheel 9999.9 ft 10 cm Datasheet. Available online: https://www.amazon.com/Mechanical-Measuring-Hand-Held-Accuracy-Distance/dp/B07ZNTCN4V/ref=sr_1_5?dchild=1&keywords=Measuring+Wheels+accuracy&qid=1616688581&s=hi&sr=1-5 (accessed on 26 March 2021).
- Visconti, P.; Sbarro, B.; Primiceri, P. A ST X-Nucleo-based telemetry unit for detection and Wi-Fi transmission of competition car sensors data: Firmware development, sensors testing and real-time data analysis. Int. J. Smart Sens. Intell. Syst. 2017, 10, 793–828. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VBOX 3iSR with RLACS156 Antenna | |
|---|---|
| Midpoint UTM coordinates | (738504.449 m E; 4466935.146 m N) |
| Standard deviation UTM East | 2.3 mm |
| Standard deviation UTM North | 3.6 mm |
| CEP 95% | 7.5 mm |
| Mean | Standard Deviation | Max Value | |
|---|---|---|---|
| Distance error (cm) | 2.9 | 1.1 | 4.5 |
| Percentage distance error % | 0.26 | 0.12 | 0.46 |
| Angular error (°) | 0.18 | 0.13 | 0.45 |
| Mean | Standard Deviation | Max Value | |
|---|---|---|---|
| Distance error (cm) | 2.4 | 0.3 | 2.9 |
| Percentage distance error % | 0.26 | 0.35 | 0.15 |
| Angular error (°) | 0.04 | 0.03 | 0.08 |
| Work | Used System | Mean Error (cm) | Standard Deviation (cm) |
|---|---|---|---|
| Our system | VBOX 3iSR | 2.4 | 0.3 |
| Feng et al. [34] | HD-RTK2™ | 2.0 | 0.7 |
| Kong [35] | Topcon HiPer | 1.5 | 0.9 |
| Xu et al. [36] | Trimble R10 | 2.2 | 0.8 |
| Manadhar et al. [37] | Novatel R20 | 3.0 | 2.0 |
| Rohr et al. [38] | Javad | 5.3 | - |
| Reid et al. [39] | OxTS RT3000 | 75.0 | 10.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Visconti, P.; Iaia, F.; De Fazio, R.; Giannoccaro, N.I. A Stake-Out Prototype System Based on GNSS-RTK Technology for Implementing Accurate Vehicle Reliability and Performance Tests. Energies 2021, 14, 4885. https://doi.org/10.3390/en14164885
Visconti P, Iaia F, De Fazio R, Giannoccaro NI. A Stake-Out Prototype System Based on GNSS-RTK Technology for Implementing Accurate Vehicle Reliability and Performance Tests. Energies. 2021; 14(16):4885. https://doi.org/10.3390/en14164885
Chicago/Turabian StyleVisconti, Paolo, Francesco Iaia, Roberto De Fazio, and Nicola Ivan Giannoccaro. 2021. "A Stake-Out Prototype System Based on GNSS-RTK Technology for Implementing Accurate Vehicle Reliability and Performance Tests" Energies 14, no. 16: 4885. https://doi.org/10.3390/en14164885
APA StyleVisconti, P., Iaia, F., De Fazio, R., & Giannoccaro, N. I. (2021). A Stake-Out Prototype System Based on GNSS-RTK Technology for Implementing Accurate Vehicle Reliability and Performance Tests. Energies, 14(16), 4885. https://doi.org/10.3390/en14164885