
Stochastic Modelling to Analyze the Impact of Electric Vehicle Penetration in Thailand


Abstract
:1. Introduction
2. Electric Vehicle Situation in Thailand
3. Electric Vehicle Penetration Scenarios
- Probable scenario: A situation in which the expansion of EVs is on a feasible basis in Thailand.
- The expansion of electric motorcycles is 35.0% of the sales share of the total motorcycle market in 2030. This represents half of the target for electric motorcycles from the 20-Year Thailand’s Energy Efficiency Plan.
- The expansion in the E-Car is accounted for 34.0% of new EV sales in the passenger car market. This is a result of delayed expansion by 5 years from the blue map in the Technology Roadmap: Electric and Plug-in Hybrid Electric Vehicles of the International Energy Agency (IEA).
- In order to see preliminary results, the study expects the number of E-Buses to grow by 200 every year.
- Extreme scenario: A situation in which the expansion of EVs has reached or exceeded expectations.
- The expansion of electric motorcycles is 70.0% of the sales share of the total motorcycle market in 2030, the target for electric motorcycles from the 20-Year Thailand’s Energy Efficiency Plan.
- The expansion of EVs in the passenger car segment accounts for 50.0% of new EVs in the passenger car market. This is the result of the target to expand, according to the blue map case of the IEA.
- E-Buses are considered to be a probable scenario.
4. System Analysis
5. Analysis of Electric Vehicle Charging Demands
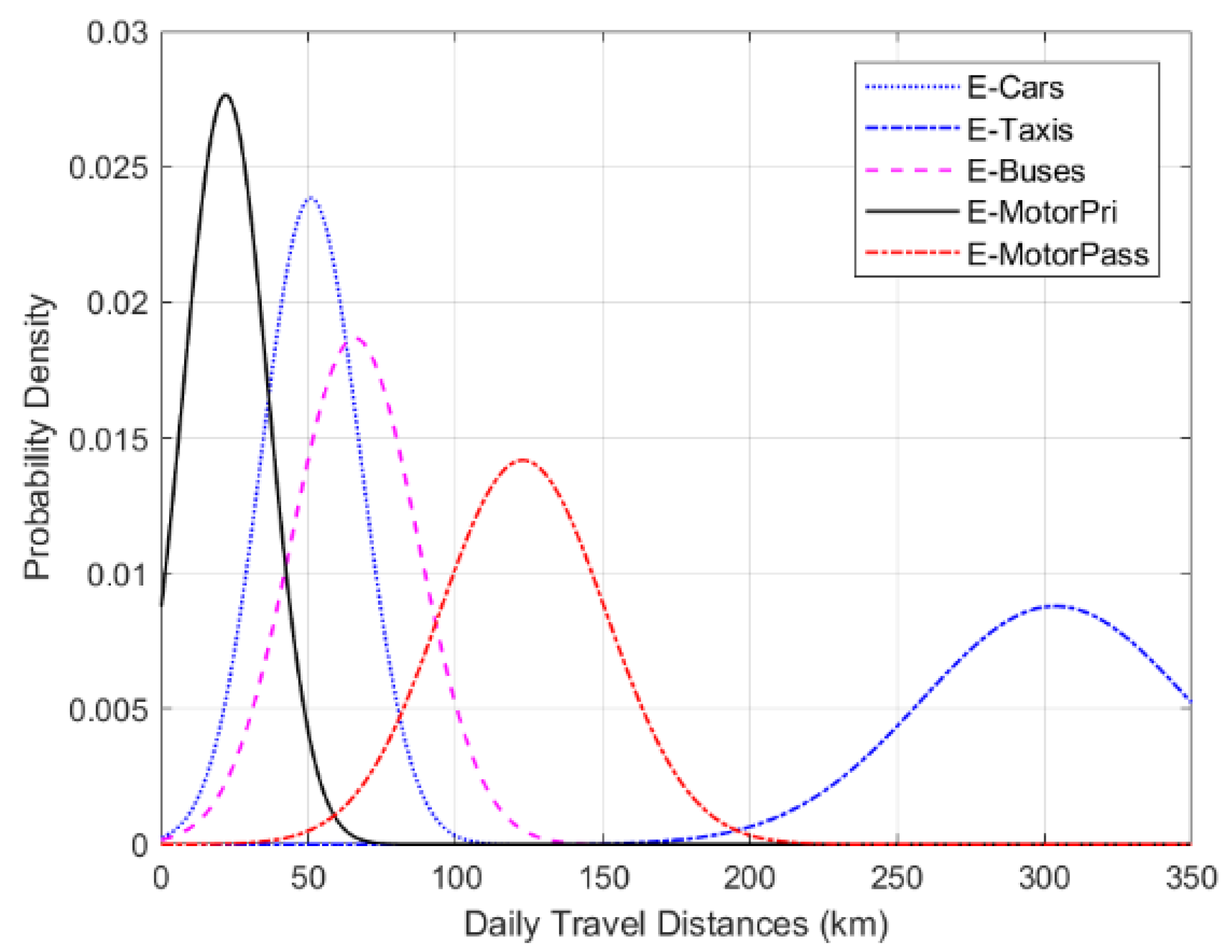
5.1. Daily Travel Distance
5.2. Driving Behaviors/Initial State of Charge
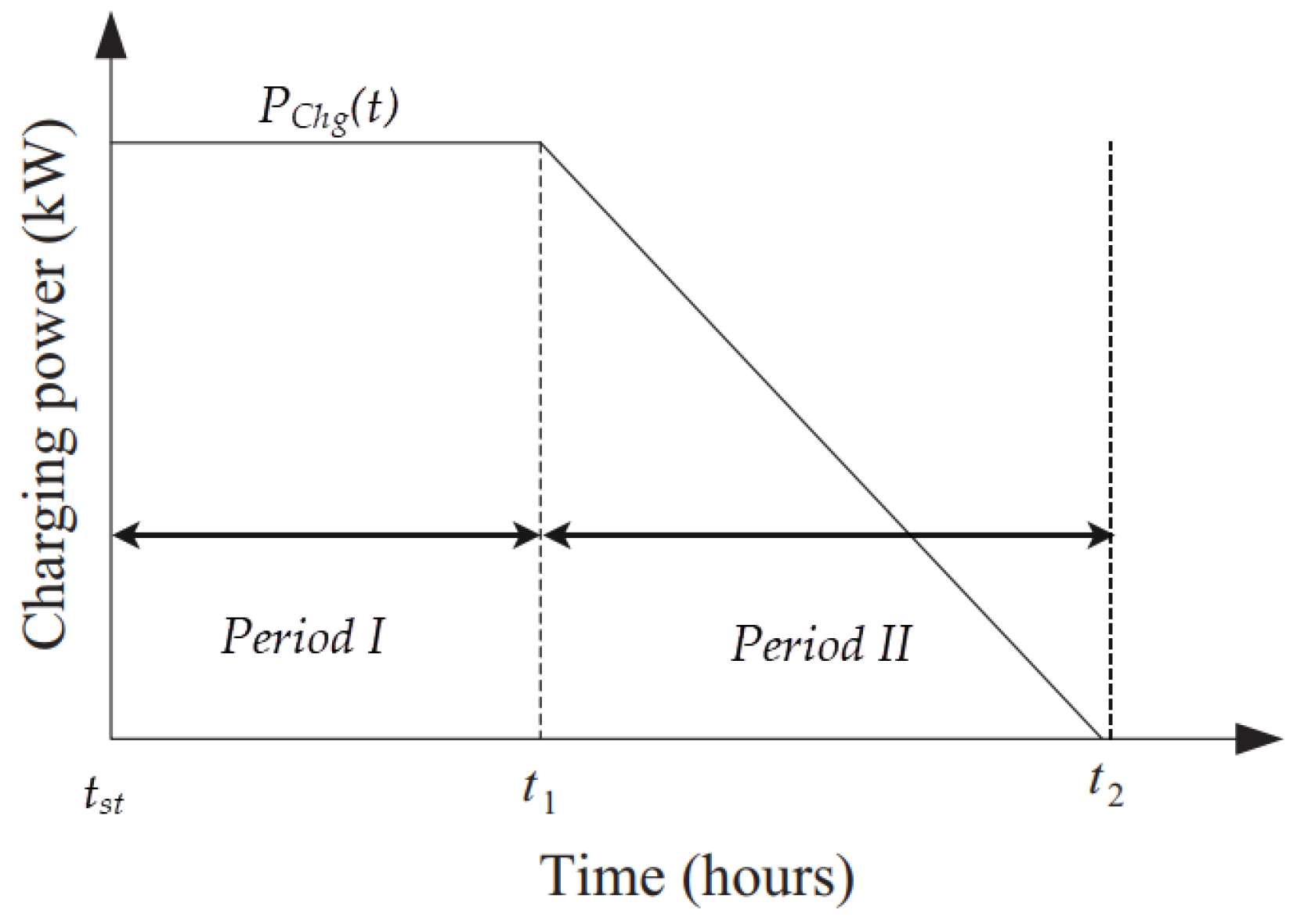
5.3. Charging Power
- Slow charging: This is generally an AC system with low power. The recharging time is about 4–12 h [26]. Currently, slow charging technology is limited by onboard charging, which is designed by each vehicle manufacturer. The onboard charging power rating is provided in Table 1. Slow charging is generally occurred in modes 1 and 2.
- Fast charging: For mode 3 and mode 4, fast charging refers to a high-current AC system and a high-current DC system with a high-power output. It is a 20-min to 2-h charging service provided by a large current in an EV. Fast charging and charging stations currently on the market include power ratings from 22 kW to 43 kW for mode 3 and 50 kW, 100 kW and 150 kW for mode 4. The maximum power limit for EV fast charging is not considered in this simulation.
5.4. Charging Strategy
5.4.1. Free-Charging Strategy
5.4.2. Off-Peak Charging Strategy
5.5. Electric Vehicle Charging Demand Calculation
5.6. Energy Consumption and Greenhouse Gases Emissions Calculation
5.7. Analysis Frameworks of Benefits and Trade-Offs for EV Charging
- 1.
- Initiate number of EVs: The EV penetration in each year yth is assigned.
- 2.
- Based on the PDFs of stochastic variables, daily travel distance of ith EV in jth fleet type is generated by Equation (1) or (2) for normal or logarithmic distribution type, respectively.
- 3.
- 4.
- The initial state of charge can be estimated by Equation (4).
- 5.
- Charging power is randomly determined based on the charging location, as expressed in Equation (5).
- 6.
- Start charging time is generated based on the PDF of each EV type, which can be expressed in Equation (1). In this step, charging strategies are considered.
- 7.
- The aggregated EV charging demand, energy requirement and GHG emissions can be calculated by Equations (7)–(17). Loop counts continue until the total EV calculation is completed, representing the total number of EVs.
- 8.
- The simulation runs from 2019 to 2036 and has 100 iterations per year.
6. Results and Discussion
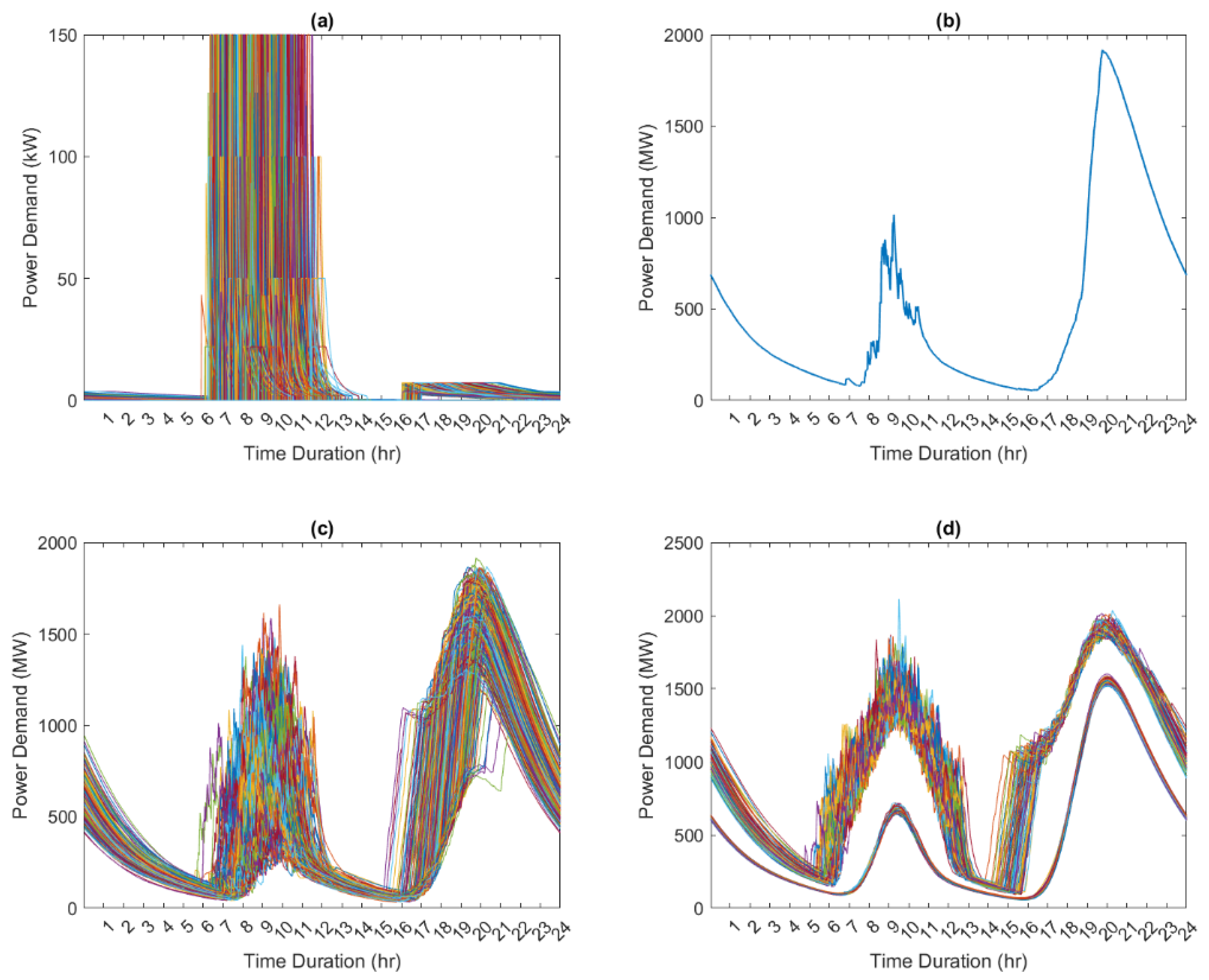
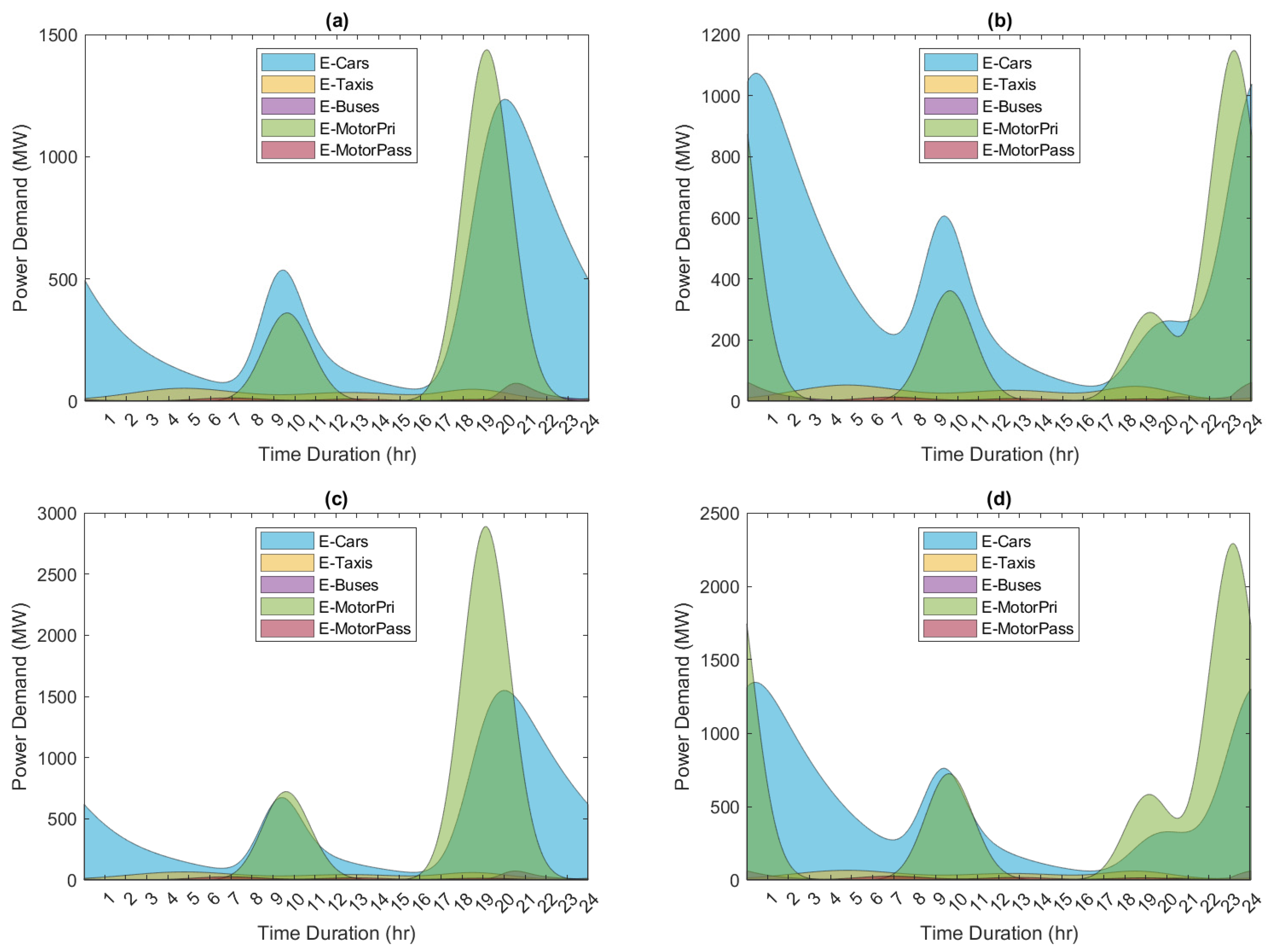
6.1. Electric Vehicle Charging Demand
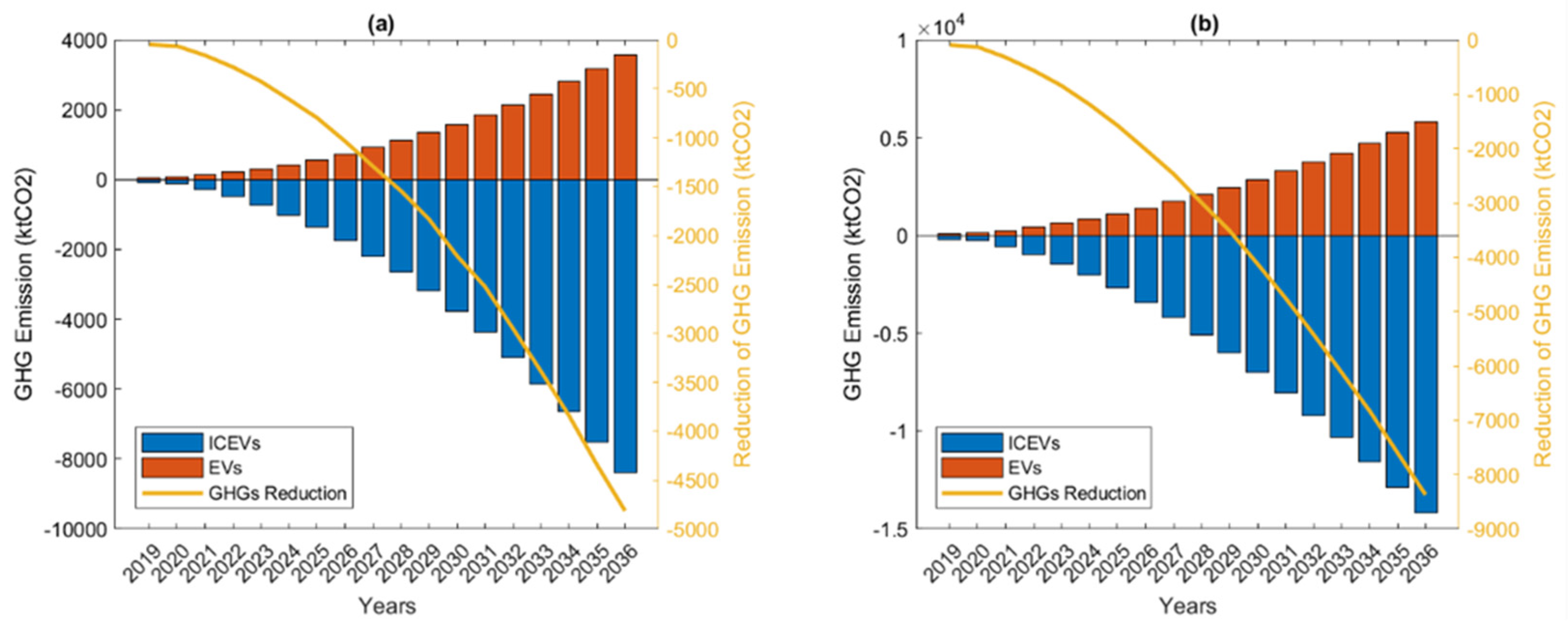
6.2. Energy Consumption and Greenhouse Gases Emissions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Energy Statistics of Thailand. Energy Policy and Planning Office, Ministry of Energy, Thailand. Available online: https://drive.google.com/file/d/1zhiH0TcZWUAuReQA_TPdCelhWjH3lTPP/view (accessed on 1 June 2021).
- Tribioli, L.; Barbieri, M.; Capata, R.; Sciubba, E.; Jannelli, E.; Bella, G. A real time energy management strategy for plug-in hybrid electric vehicles based on optimal control theory. Energy Procedia 2014, 45, 949–958. [Google Scholar] [CrossRef]
- Wróblewski, P.; Kupiec, J.; Drożdż, W.; Lewicki, W.; Jaworski, J. The Economic Aspect of Using Different Plug-In Hybrid Driving Techniques in Urban Conditions. Energies 2021, 14, 3543. [Google Scholar] [CrossRef]
- Lian, J.; Liu, S.; Li, L.; Liu, X.; Zhou, Y.; Yang, F.; Yuan, L. A mixed logical dynamical-model predictive control (MLD-MPC) energy management control strategy for plug-in hybrid electric vehicles (PHEVs). Energies 2017, 10, 74. [Google Scholar] [CrossRef]
- Chen, Y.; Hu, K.; Zhao, J.; Li, G.; Johnson, J.; Zietsman, J. In-use energy and CO2 emissions impact of a plug-in hybrid and battery electric vehicle based on real-world driving. Int. J. Environ. Sci. Technol. 2018, 15, 1001–1008. [Google Scholar] [CrossRef]
- Targeting Electric Vehicles by 2030. Available online: https://thestandard.co/supattanapong-electric-vehicles-target-by-2030/ (accessed on 1 August 2021).
- Energy Policy and Planning Office, Ministry of Energy, Thailand. Energy Efficiency Plan; EEP 2015. Available online: http://www.eppo.go.th/images/POLICY/PDF/EEP2015.pdf (accessed on 10 June 2021).
- Daina, N.; Sivakumar, A.; Polak, J.W. Modelling electric vehicles use: A survey on the methods. Renew. Sustain. Energy Rev. 2017, 68, 447–460. [Google Scholar] [CrossRef] [Green Version]
- Ni, X.; Lo, K.L. A Methodology to Model Daily Charging Load in the EV Charging Stations Based on Monte Carlo Simulation. In Proceedings of the 2020 International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Kuching, Malaysia, 4–7 October 2020; pp. 125–130. [Google Scholar] [CrossRef]
- Liu, D.; Li, Z.; Jiang, J.; Cheng, X.; Wu, G. Electric Vehicle Load Forecast Based on Monte Carlo Algorithm. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; pp. 1760–1763. [Google Scholar] [CrossRef]
- Guo, C.; Liu, D.; Geng, W.; Zhu, C.; Wang, X.; Cao, X. Modeling and Analysis of Electric Vehicle Charging Load in Residential Area. In Proceedings of the 2019 4th International Conference on Power and Renewable Energy (ICPRE), Chengdu, China, 21–23 September 2019; pp. 394–402. [Google Scholar] [CrossRef]
- Singh, J.; Tiwari, R. Probabilistic Modeling and Analysis of Aggregated Electric Vehicle Charging Station Load on Distribution System. In Proceedings of the 2017 14th IEEE India Council International Conference (INDICON), Roorkee, India, 15–17 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Su, J.; Lie, T.T.; Zamora, R. Modelling of large-scale electric vehicles charging demand: A New Zealand case study. Electr. Power Syst. Res. Elsevier BV 2019, 167, 171–182. [Google Scholar] [CrossRef]
- Moon, J.H.; Gwon, H.N.; Jo, G.R.; Choi, W.Y.; Kook, K.S. Stochastic Modeling Method of Plug-in Electric Vehicle Charging Demand for Korean Transmission System Planning. Energies 2020, 13, 4404. [Google Scholar] [CrossRef]
- Foley, A.; Tyther, B.; Calnan, P.; Gallachóir, B.Ó. Impacts of Electric Vehicle charging under electricity market operations. Appl. Energy 2013, 101, 93–102. [Google Scholar] [CrossRef]
- Saisirirat, P.; Chollacoop, N.; Tongroon, M.; Laoonual, Y.; Pongthanaisawan, J. Scenario analysis of electric vehicle technology penetration in Thailand: Comparisons of required electricity with power development plan and projections of fossil fuel and greenhouse gas reduction. Energy Procedia 2013, 34, 459–470. [Google Scholar] [CrossRef] [Green Version]
- Department of Land Transport. Registered Car (Cumulative) in Transport Statistics Group Data. Available online: https://web.dlt.go.th/statistics/ (accessed on 1 June 2021).
- Uthathip, N.; Bhasaputra, P.; Pattaraprakorn, W. Application of ANFIS Model for Thailand’s Electric Vehicle Consumption. Comput. Syst. Sci. Eng. 2021, in press. [Google Scholar] [CrossRef]
- Suchart, P. Development of an Electric Bus Prototype Using Lithium-Ion Battery for Thailand. Ph.D. Dissertation, School of Electrical Engineering Institute of Engineering Suranaree University of Technology, Nakhon Ratchasima, Thailand, 2018. [Google Scholar]
- Thailand Power Development Plan 2018–2037 (PDP 2018). The Government Policies of Electricity, Ministry of Energy, Thailand. Available online: https://www.thaienergy.org/Blog/5 (accessed on 10 June 2021).
- Spinning Reserve. Electric Generating Authority of Thailand. Available online: https://www.egat.co.th/index.php?option=com_content&view=article&id=357&Itemid=2 (accessed on 1 May 2021).
- Wu, J.; Liang, J.; Ruan, J.; Zhang, N.; Walker, P.D. Efficiency comparison of electric vehicles powertrains with dual motor and single motor input. Mech. Mach. Theory 2018, 128, 569–585. [Google Scholar] [CrossRef]
- Kellner, Q.; Hosseinzadeh, E.; Chouchelamane, G.; Widanage, W.D.; Marco, J. Battery cycle life test development for high-performance electric vehicle applications. J. Energy Storage 2018, 15, 228–244. [Google Scholar] [CrossRef]
- BU-1003a: Battery Aging in an Electric Vehicle (EV). Available online: https://batteryuniversity.com/article/bu-1003a-battery-aging-in-an-electric-vehicle-ev (accessed on 1 June 2021).
- Qian, K.; Zhou, C.; Yuan, Y. Impacts of high penetration level of fully electric vehicles charging loads on the thermal ageing of power transformers. Int. J. Electr. Power Energy Syst. 2015, 65, 102–112. [Google Scholar] [CrossRef] [Green Version]
- Xiang, K.; Li, Y.; Lin, C.; Li, Y.; Cai, Q.; Du, Y. In An Electric Vehicle Charging Load Forecast Model Based on Probability Distribution. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration (EI2), Wuhan, China, 30 October–1 November 2020; pp. 2847–2851. [Google Scholar] [CrossRef]
- Marra, F.; Yang, G.Y.; Træholt, C.; Larsen, E.; Rasmussen, C.N.; You, S. In Demand profile study of battery electric vehicle under different charging options. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Staats, P.T.; Grady, W.M.; Arapostathis, A.; Thallam, R.S. A statistical method for predicting the net harmonic currents generated by a concentration of electric vehicle battery chargers. IEEE Trans. Power Deliv. 1997, 12, 58–66. [Google Scholar] [CrossRef]
- Gómez, J.C.; Morcos, M.M. Impact of EV battery chargers on the power quality of distribution systems. IEEE Trans. Power Deliv. 2003, 18, 975–981. [Google Scholar] [CrossRef]
- Heydt, G.T. The impact of electric vehicle deployment on load management strategies. IEEE Trans. Power Appar. Syst. 1983, PAS-102, 1253–1259. [Google Scholar] [CrossRef]
- Duncan, J. Electric Vehicles: Impacts on New Zealand’s Electricity System. 2010. Available online: https://ir.canterbury.ac.nz/handle/10092/11575 (accessed on 1 May 2021).
- Charlton, S.G.; Baas, P.H.; Alley, B.D.; Luther, R.E. Analysis of Fatigue Levels in New Zealand Taxi and Local-Route Truck Drivers. 2003. Available online: https://www.nzta.govt.nz/resources/fatigue-levels-in-taxi-and-local-route-drivers/ (accessed on 1 May 2021).
- New Zealand’s First Electric Bus Hits the Road. Auckland University of Technology. 2018. Available online: https://news.aut.ac.nz/around-aut-news/new-zealands-first-electric-bushits-the-road (accessed on 1 May 2021).
- Sioshansi, R.; Denholm, P. The value of plug-in hybrid electric vehicles as grid resources. Energy J. 2010, 31, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Winyuchakrit, P.; Sukamongkol, Y.; Limmeechokchai, B. Do Electric Vehicles Really Reduce GHG Emissions in Thailand? Energy Procedia 2017, 138, 348–353. [Google Scholar] [CrossRef]
- CO2 Emission by Energy Type and Sector. Available online: http://www.eppo.go.th/index.php/th/energy-information/static-energy/static-co2 (accessed on 1 June 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EV Types | Vehicle Size | Battery Capacity (kWh) | Onboard Charger (kW) | Fast Charger (kW) |
|---|---|---|---|---|
| E-Cars and E-Taxis | Small | 36 | 3.6 | 22, 43, 50, 100, 150 |
| E-Cars and E-Taxis | Medium | 50 | 7.2 | 22, 43, 50, 100, 150 |
| E-Cars and E-Taxis | Large | 80 | 7.2 | 22, 43, 50, 100, 150 |
| E-Buses | - | 196 | - | 22, 43, 50, 100, 150 |
| E-MotorPri and E-MotorPass | Small | 0.8 (48 V, 15 Ah) | 0.44 (220 Vac, 2 A) | - |
| E-MotorPri and E-MotorPass | Medium | 1.2 (60 V, 20 Ah) | 0.44 (220 Vac, 2 A) | - |
| E-MotorPri and E-MotorPass | Large | 1.9 (48 V, 40 Ah) | 0.44 (220 Vac, 2 A) | - |
| Year | PDP2018 | ||
|---|---|---|---|
| Peak Demand (MW) | Energy Requirement (GWh) | Power Capacity (MW) | |
| 2022 | 35,213 | 236,488 | 54,431 |
| 2027 | 41,079 | 277,302 | 56,863 |
| 2032 | 47,303 | 320,761 | 67,194 |
| 2036 | 52,609 | 357,720 | 76,435 |
| EV Types | Input1 (I1) (Vehicle Size) | Input2 (I2) (Driving Speed) | Input3 (I2) (No. Passenger) |
|---|---|---|---|
| E-Cars | L (1.497, 0.656) | N (3.358, 0.686) | L (1.976, 1.003) |
| E-Taxis | L (1.759, 0.836) | N (3.132, 0.461) | N (2.671, 1.070) |
| E-Buses | - | N (3.002, 1.047) | N (3.481, 0.786) |
| E-MotorPri | N (2.107, 0.656) | L (3.960, 1.120) | L (1.621, 0.684) |
| E-MotorPass | L (1.818, 0.428) | N (3.611, 1.019) | L (2.107, 0.310) |
| EV Types | Charging Period | Charging Mode | Probability | Initial Daily Distance | Plug-In Time |
|---|---|---|---|---|---|
| E-Cars | 09:00–17:00 | Slow | 10% | N (50.844, 16.724) | N (9, 0.9) |
| 09:00–17:00 | Fast | 10% | N (9, 0.9) | ||
| 18:00–07:00 | Slow | 80% | N (18.5, 1) | ||
| E-Taxis | 00:00–09:00 | Fast | 90% | L (303.770, 45.405) | N (4, 2.5) |
| 09:00–16:00 | Fast | 60% | N (12, 2.5) | ||
| 16:00–24:00 | Fast | 50% | N (18, 1.5) | ||
| E-Buses | 20:00–07:00 | Fast | 100% | N (65.729, 21.359) | N (20, 0.5) |
| E-MotorPri | 18:00–07:00 | Slow | 80% | L (21.859, 14.422) | N (18.5, 1) |
| 09:00–17:00 | Slow | 20% | N (9, 1) | ||
| E-MotorPass | 06:00–12:00 | Slow | 90% | N (122.851, 28.150) | N (9, 1.5) |
| 12:00–18:00 | Slow | 60% | N (15, 1.5) | ||
| 18:00–24.00 | Slow | 50% | N (21, 1.5) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uthathip, N.; Bhasaputra, P.; Pattaraprakorn, W. Stochastic Modelling to Analyze the Impact of Electric Vehicle Penetration in Thailand. Energies 2021, 14, 5037. https://doi.org/10.3390/en14165037
Uthathip N, Bhasaputra P, Pattaraprakorn W. Stochastic Modelling to Analyze the Impact of Electric Vehicle Penetration in Thailand. Energies. 2021; 14(16):5037. https://doi.org/10.3390/en14165037
Chicago/Turabian StyleUthathip, Narongkorn, Pornrapeepat Bhasaputra, and Woraratana Pattaraprakorn. 2021. "Stochastic Modelling to Analyze the Impact of Electric Vehicle Penetration in Thailand" Energies 14, no. 16: 5037. https://doi.org/10.3390/en14165037
APA StyleUthathip, N., Bhasaputra, P., & Pattaraprakorn, W. (2021). Stochastic Modelling to Analyze the Impact of Electric Vehicle Penetration in Thailand. Energies, 14(16), 5037. https://doi.org/10.3390/en14165037