
A Coordinated Charging Scheduling of Electric Vehicles Considering Optimal Charging Time for Network Power Loss Minimization

 , , , ,
, , , ,  ,
, 


Abstract
:1. Introduction
2. Problem Formulation
2.1. Optimization Objective
2.2. Network and Charging Constraints
3. Coordinated Charging Framework
- Step I:
- The program starts with entering the system data including the network and EVs’ information. The network data consists of system parameters and daily load curve whereas the EVs’ data consists of arrival and departure time and their corresponding SOC levels and charger efficiency with rating.
- Step II:
- After this, the algorithm will check the maximum demand constraint. Once this constraint is satisfied, all the available EVs will be provisionally placed in OCST matrix formulated from the extracted data.
- Step III:
- The number of EVs which can be facilitated in each time slot are determined by Equation (7). This defines the number of EVs ready to participate in the optimization process for their charging demand.
- Step IV:
- After finding the number of EVs available at any time slot, the scheduler will check that either the available slots are greater or less than the required slots.
- Step V:
- If available time slots are less than the required time slots, BEP will be executed to select the optimal combination of EVs by considering the system constraints. Then the OCST matrix will be updated with permanent placement of selected EVs.
- Step VI:
- However, if the available time slots are greater than the required time slots, the load flow program will be executed with all available EVs followed by voltage constraint satisfaction and an update to OCST matrix. Upon violation of voltage constraint, BEP will execute to select optimal number of EVs from the set of available EVs for charging. Otherwise, OCST matrix will be directly updated without performing BEP optimization process.
- Step VII:
- The above steps will repeat until the maximum time slots for a whole day are reached.
3.1. Formation of OCST Matrix

3.2. Optimization Algorithm
4. Radial Distribution Test System
Electric Vehicle Charger and Battery Requirements
5. Results and Discussion
5.1. Random Uncoordinated Charging
5.2. Coordinated Charging
5.2.1. Coordinated Charging without Optimal Starting Time
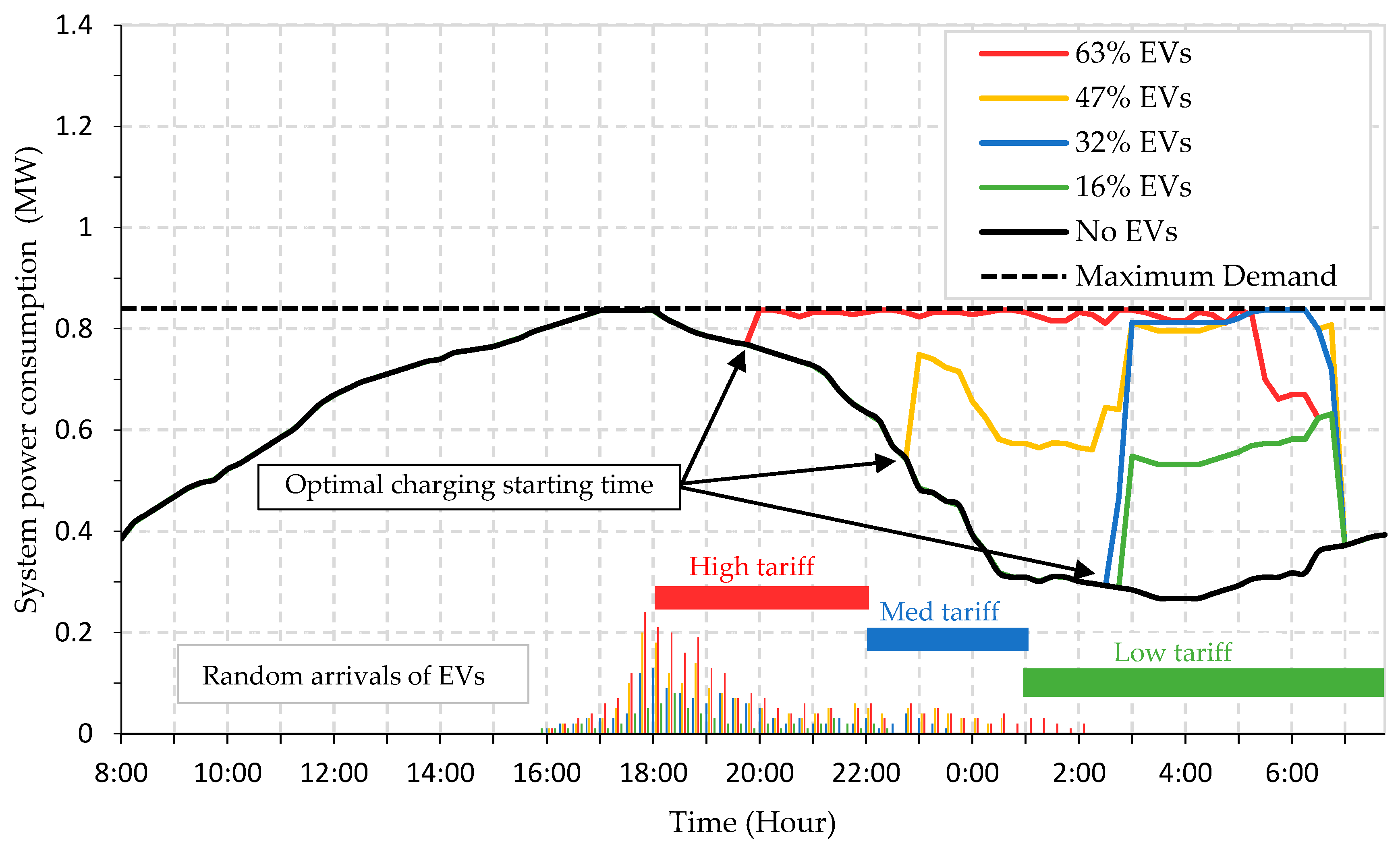
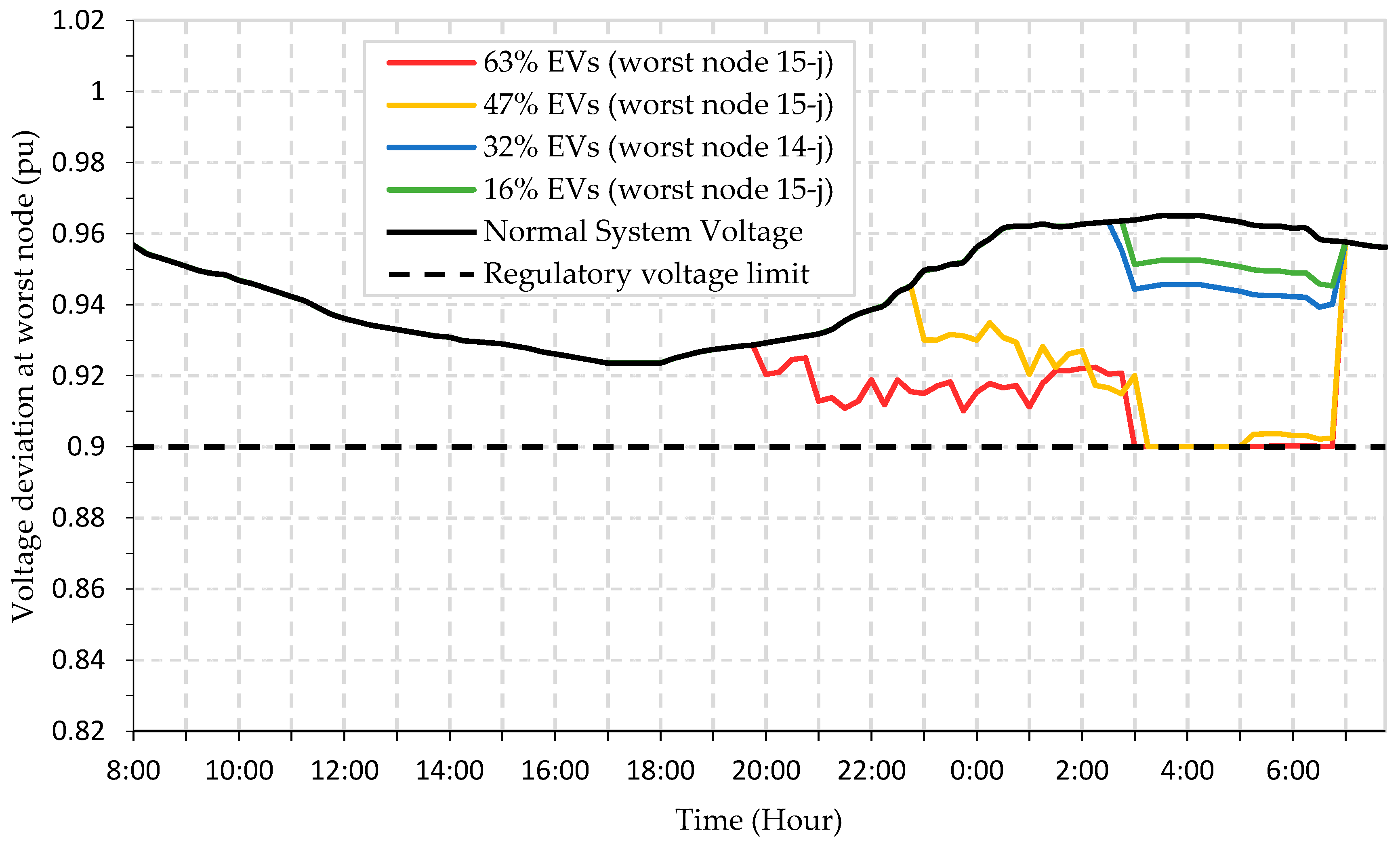
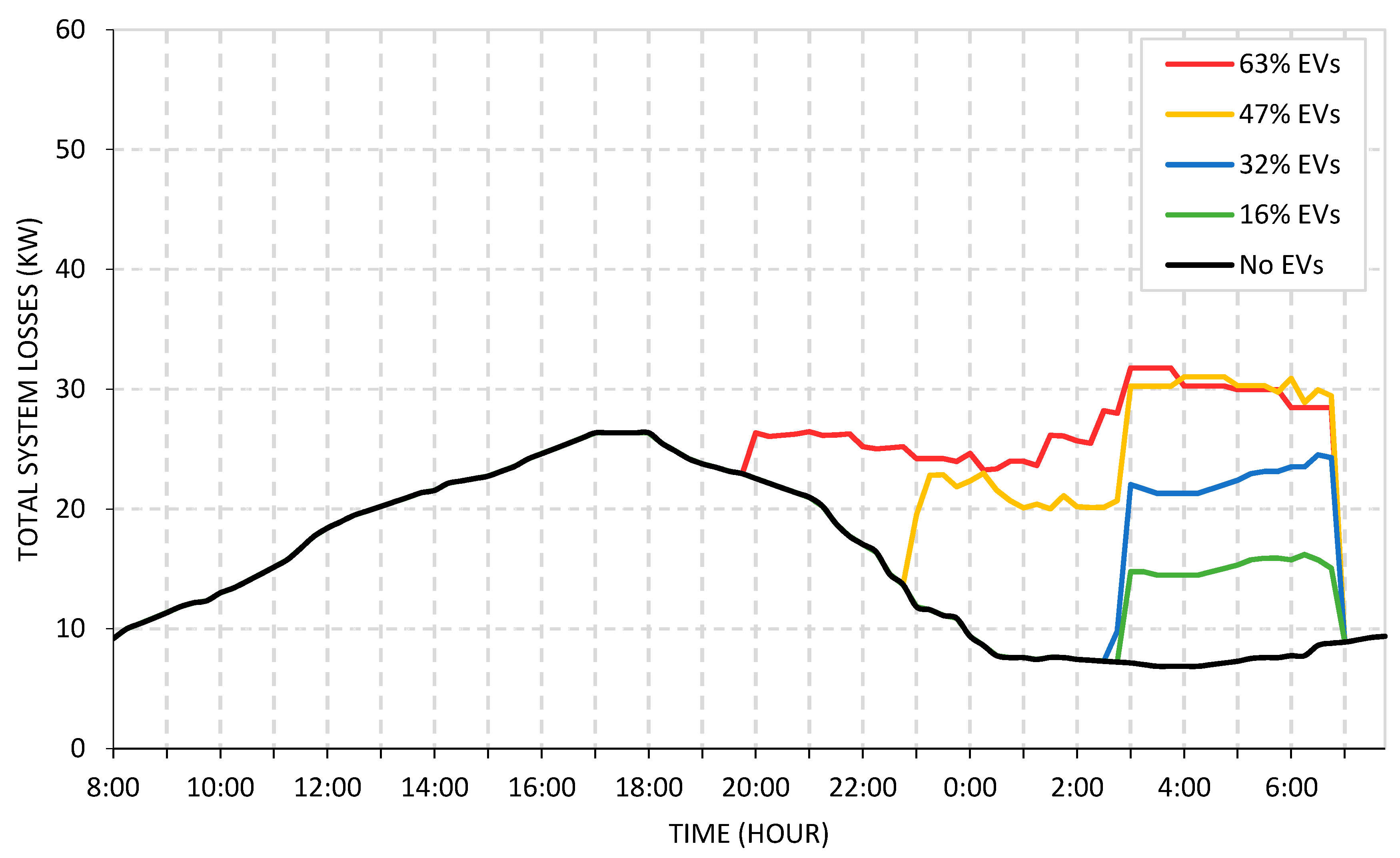
5.2.2. Coordinated Charging Considering Optimal Starting Time (OCST) Matrix
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Darabi, Z.; Ferdowsi, M. Plug-in hybrid electric vehicles: Charging load profile extraction based on transportation data. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2011; pp. 1–8. [Google Scholar]
- Wirasingha, S.G.; Emadi, A. Pihef: Plug-in hybrid electric factor. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2009; pp. 661–668. [Google Scholar]
- Rezaee, S.; Farjah, E.; Khorramdel, B. Probabilistic analysis of plug-in electric vehicles impact on electrical grid through homes and parking lots. IEEE Trans. Sustain. Energy 2013, 4, 1024–1033. [Google Scholar] [CrossRef]
- Amin, A.; Tareen, W.U.K.; Usman, M.; Ali, H.; Bari, I.; Horan, B.; Mekhilef, S.; Asif, M.; Ahmed, S.; Mahmood, A.J.S. A review of optimal charging strategy for electric vehicles under dynamic pricing schemes in the distribution charging network. Sustainability 2020, 12, 160. [Google Scholar] [CrossRef]
- Amin, A.; Tareen, W.U.K.; Usman, M.; Memon, K.A.; Horan, B.; Mahmood, A.; Mekhilef, S. An integrated approach to optimal charging scheduling of electric vehicles integrated with improved medium-voltage network reconfiguration for power loss minimization. Sustainability 2020, 12, 9211. [Google Scholar] [CrossRef]
- Masoum, A.S.; Deilami, S.; Moses, P.S.; Masoum, M.A.; Abu-Siada, A. Smart load management of plug-in electric vehicles in distribution and residential networks with charging stations for peak shaving and loss minimisation considering voltage regulation. IET Gener. Transm. Distrib. 2011, 5, 877–888. [Google Scholar] [CrossRef]
- Zhou, C.-B.; Qi, S.-Z.; Zhang, J.-H.; Tang, S.-Y. Potential co-benefit effect analysis of orderly charging and discharging of electric vehicles in China. Energy 2021, 226, 120352. [Google Scholar] [CrossRef]
- Alonso, M.; Amaris, H.; Germain, J.G.; Galan, J.M. Optimal charging scheduling of electric vehicles in smart grids by heuristic algorithms. Energies 2014, 7, 2449–2475. [Google Scholar] [CrossRef]
- Lyu, L.; Yang, X.; Xiang, Y.; Liu, J.; Jawad, S.; Deng, R. Exploring high-penetration electric vehicles impact on urban power grid based on voltage stability analysis. Energy 2020, 198, 117301. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of vehicle-to-grid on the distribution grid. Electr. Power Syst. Res. 2011, 81, 185–192. [Google Scholar] [CrossRef]
- Moghbel, M.; Masoum, M.A.; Shahnia, F.; Moses, P. Distribution transformer loading in unbalanced three-phase residential networks with random charging of plug-in electric vehicles. In Proceedings of the 22nd Australasian Universities Power Engineering Conference (AUPEC), Bali, Indonesia, 26–29 September 2012; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2012; pp. 1–6. [Google Scholar]
- Jarvis, R.; Moses, P. Smart grid congestion caused by plug-in electric vehicle charging. In Proceedings of the 2019 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 7–8 February 2019; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Oliveira, D.Q.; de Souza, A.Z.; Delboni, L.F.N. Optimal plug-in hybrid electric vehicles recharge in distribution power systems. Electr. Power Syst. Res. 2013, 98, 77–85. [Google Scholar] [CrossRef]
- Zhou, K.; Cheng, L.; Wen, L.; Lu, X.; Ding, T. A coordinated charging scheduling method for electric vehicles considering different charging demands. Energy 2020, 213, 118882. [Google Scholar] [CrossRef]
- Suyono, H.; Rahman, M.T.; Mokhlis, H.; Othman, M.; Illias, H.A.; Mohamad, H. Optimal scheduling of plug-in electric vehicle charging including time-of-use tariff to minimize cost and system stress. Energies 2019, 12, 1500. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Zou, S.; Ran, L.; Shi, X.; Hiskens, I.A. Efficient decentralized coordination of large-scale plug-in electric vehicle charging. Automatica 2016, 69, 35–47. [Google Scholar] [CrossRef]
- Vuelvas, J.; Ruiz, F.; Gruosso, G. A time-of-use pricing strategy for managing electric vehicle clusters. Sustain. Energy Grids Netw. 2021, 25, 100411. [Google Scholar] [CrossRef]
- Srithapon, C.; Ghosh, P.; Siritaratiwat, A.; Chatthaworn, R. Optimization of electric vehicle charging scheduling in urban village networks considering energy arbitrage and distribution cost. Energies 2020, 13, 349. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.; Lin, B. Benefits of electric vehicles integrating into power grid. Energy 2021, 224, 120108. [Google Scholar] [CrossRef]
- Chang, G.; Chu, S.; Wang, H.L. An improved backward/forward sweep load flow algorithm for radial distribution systems. IEEE Trans. Power Syst. 2007, 22, 882–884. [Google Scholar] [CrossRef]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary programming made faster. IEEE Trans. Evol. Comput. 1999, 3, 82–102. [Google Scholar]
- Sinha, N.; Chakrabarti, R.; Chattopadhyay, P.K. Evolutionary programming techniques for economic load dispatch. IEEE Trans. Evol. Comput. 2003, 7, 83–94. [Google Scholar] [CrossRef]
- Cao, Y.J.; Jiang, L.; Wu, Q.H. An evolutionary programming approach to mixed-variable optimization problems. Appl. Math. Model. 2000, 24, 931–942. [Google Scholar] [CrossRef]
- Dong, H.; He, J.; Huang, H.; Hou, W. Evolutionary programming using a mixed mutation strategy. Inf. Sci. 2007, 177, 312–327. [Google Scholar] [CrossRef] [Green Version]
- Deilami, S.; Masoum, A.S.; Moses, P.S.; Masoum, M.A.S. Real-time coordination of plug-in electric vehicle charging in smart grids to minimize power losses and improve voltage profile. IEEE Trans. Smart Grid 2011, 2, 456–467. [Google Scholar] [CrossRef]
- Divya, K.; Østergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Algorithm | EVs (%) | (%) | (%) | IDT,MAX (p.u) | IST,MAX (p.u) | Increase in Losses (%) |
|---|---|---|---|---|---|---|---|
| 0 | 7.64 | 2.77 | 0.44 | 0.096 | - | ||
| Uncoordinated EVs’ charging | None | 16 | 8.06 | 2.88 | 0.49 | 0.115 | 3.97 |
| 32 | 8.84 | 2.98 | 0.55 | 0.139 | 7.58 | ||
| 47 | 14.20 | 3.37 | 0.63 | 0.171 | 21.66 | ||
| 63 | 15.72 | 3.57 | 0.73 | 0.199 | 28.88 | ||
| Coordinated EVs’ charging without OCST matrix | BEP | 16 | 7.75 | 2.81 | 0.47 | 0.096 | 1.44 |
| 32 | 7.96 | 2.86 | 0.48 | 0.096 | 3.25 | ||
| 47 | 9.92 | 3.13 | 0.48 | 0.096 | 13.00 | ||
| 63 | 9.99 | 3.17 | 0.48 | 0.096 | 14.44 | ||
| Coordinated EVs’ charging considering OCST matrix | Proposed | 16 | 7.64 | 2.78 | 0.44 | 0.096 | 0.36 |
| 32 | 7.64 | 2.80 | 0.44 | 0.098 | 1.08 | ||
| 47 | 9.99 | 3.09 | 0.45 | 0.098 | 11.55 | ||
| 63 | 9.99 | 3.14 | 0.53 | 0.099 | 13.36 |
| Evs (%) | BEP | Proposed |
|---|---|---|
| Reduction in Losses (%) | Reduction in Losses (%) | |
| 16 | 2.43 | 3.47 |
| 32 | 4.03 | 6.04 |
| 47 | 7.12 | 8.31 |
| 63 | 11.24 | 12.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Usman, M.; Tareen, W.U.K.; Amin, A.; Ali, H.; Bari, I.; Sajid, M.; Seyedmahmoudian, M.; Stojcevski, A.; Mahmood, A.; Mekhilef, S. A Coordinated Charging Scheduling of Electric Vehicles Considering Optimal Charging Time for Network Power Loss Minimization. Energies 2021, 14, 5336. https://doi.org/10.3390/en14175336
Usman M, Tareen WUK, Amin A, Ali H, Bari I, Sajid M, Seyedmahmoudian M, Stojcevski A, Mahmood A, Mekhilef S. A Coordinated Charging Scheduling of Electric Vehicles Considering Optimal Charging Time for Network Power Loss Minimization. Energies. 2021; 14(17):5336. https://doi.org/10.3390/en14175336
Chicago/Turabian StyleUsman, Muhammad, Wajahat Ullah Khan Tareen, Adil Amin, Haider Ali, Inam Bari, Muhammad Sajid, Mehdi Seyedmahmoudian, Alex Stojcevski, Anzar Mahmood, and Saad Mekhilef. 2021. "A Coordinated Charging Scheduling of Electric Vehicles Considering Optimal Charging Time for Network Power Loss Minimization" Energies 14, no. 17: 5336. https://doi.org/10.3390/en14175336
APA StyleUsman, M., Tareen, W. U. K., Amin, A., Ali, H., Bari, I., Sajid, M., Seyedmahmoudian, M., Stojcevski, A., Mahmood, A., & Mekhilef, S. (2021). A Coordinated Charging Scheduling of Electric Vehicles Considering Optimal Charging Time for Network Power Loss Minimization. Energies, 14(17), 5336. https://doi.org/10.3390/en14175336