
A Distributionally Robust Chance-Constrained Unit Commitment with N-1 Security and Renewable Generation

Abstract
:1. Introduction
2. Distributed Robust Unit Commitment Model
2.1. Wind and Photovoltaic Fluctuations
2.2. DRCCUC Model
3. Solution Methodology
3.1. Distributed Robust Chance Constraint
3.2. Model Decomposition Strategy
3.3. Algorithm
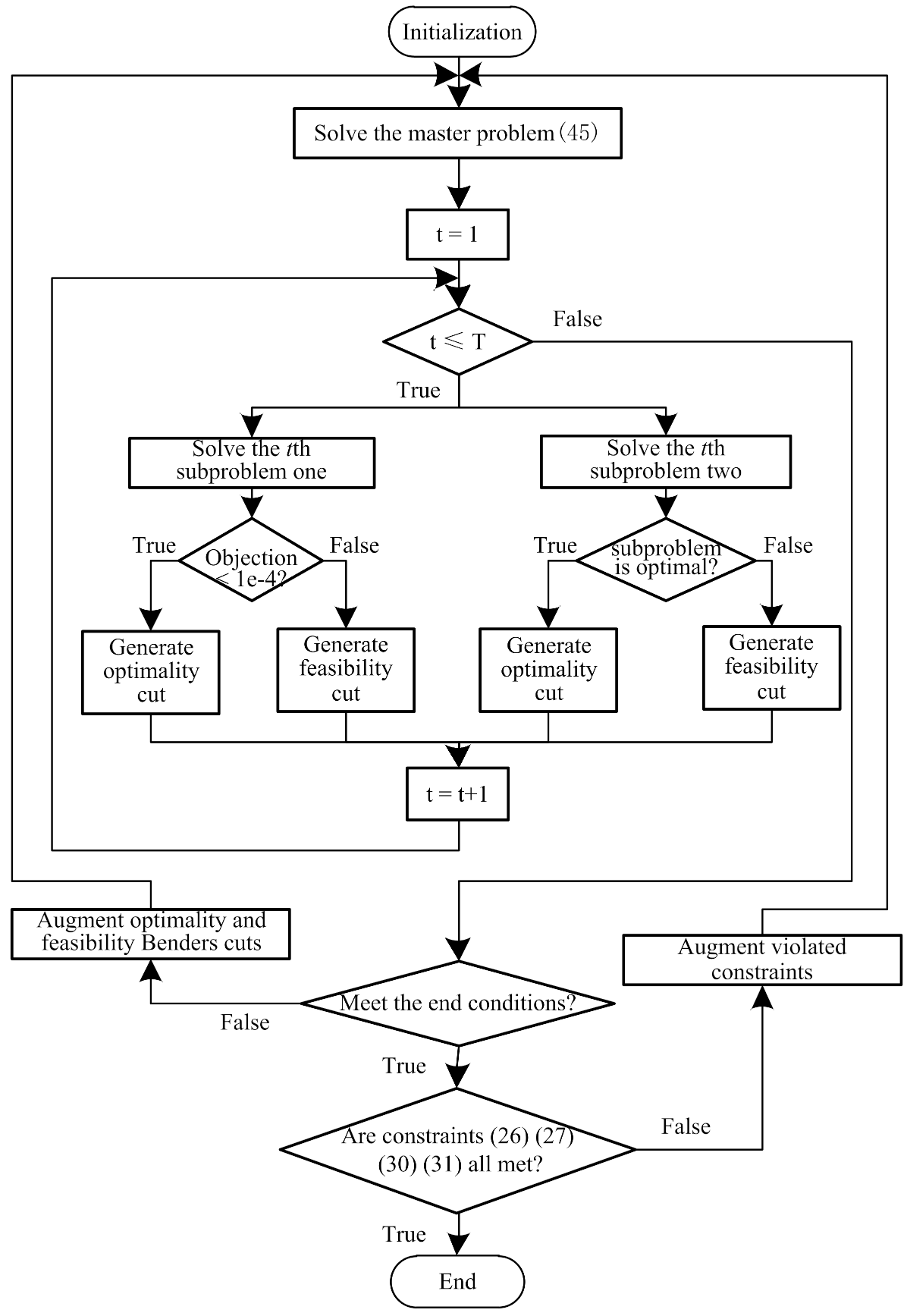
- The algorithm parameters are initialized, the number of iterations is set to zero, the upper bound (UB) and the lower bound (LB) are set to positive and negative infinity, respectively;
- The main problem (45) is solved with the sum of substitution variables being zero and benders optimal cut set and feasible cut set being empty, and the results of generator start-up, stop, active power and rotating reserve power, energy storage charging and discharging state and charging and discharging power, and wind power photovoltaic active power output are obtained;
- The first sub-problem is solved with the data stream obtained from the main problem. If the optimization result is feasible, benders optimal cut is generated according to Equation (47); if the optimization result is not feasible, benders feasibility cut is generated according to Equation (48);
- The second sub-problem is solved by the data stream obtained from the main problem. If the optimization result is not feasible, benders feasibility cut is generated according to the formula; if the optimization result is feasible, benders optimal cut is generated according to the formula;
- If all the first and second sub-problems in the scheduling cycle are feasible, then go to the next step, otherwise go to the seventh step;
- Calculate the value of the dual gap and judge whether it meets the threshold of the end of the algorithm iteration. If it meets, go to step 8. If not, go to the next step;
- Add the optimal cut set and feasible cut set to the main problem to get the new data stream and, then, go to the third step.
- Calculate whether the network security constraints satisfy the constraints (26), (27), (30), and (31) in N and N-1 states. If all the constraints are satisfied, the optimization results are output and the algorithm ends. Otherwise, the unsatisfied constraints are added to the main problem, and the second step is to solve it again.
4. Numerical Case Studies
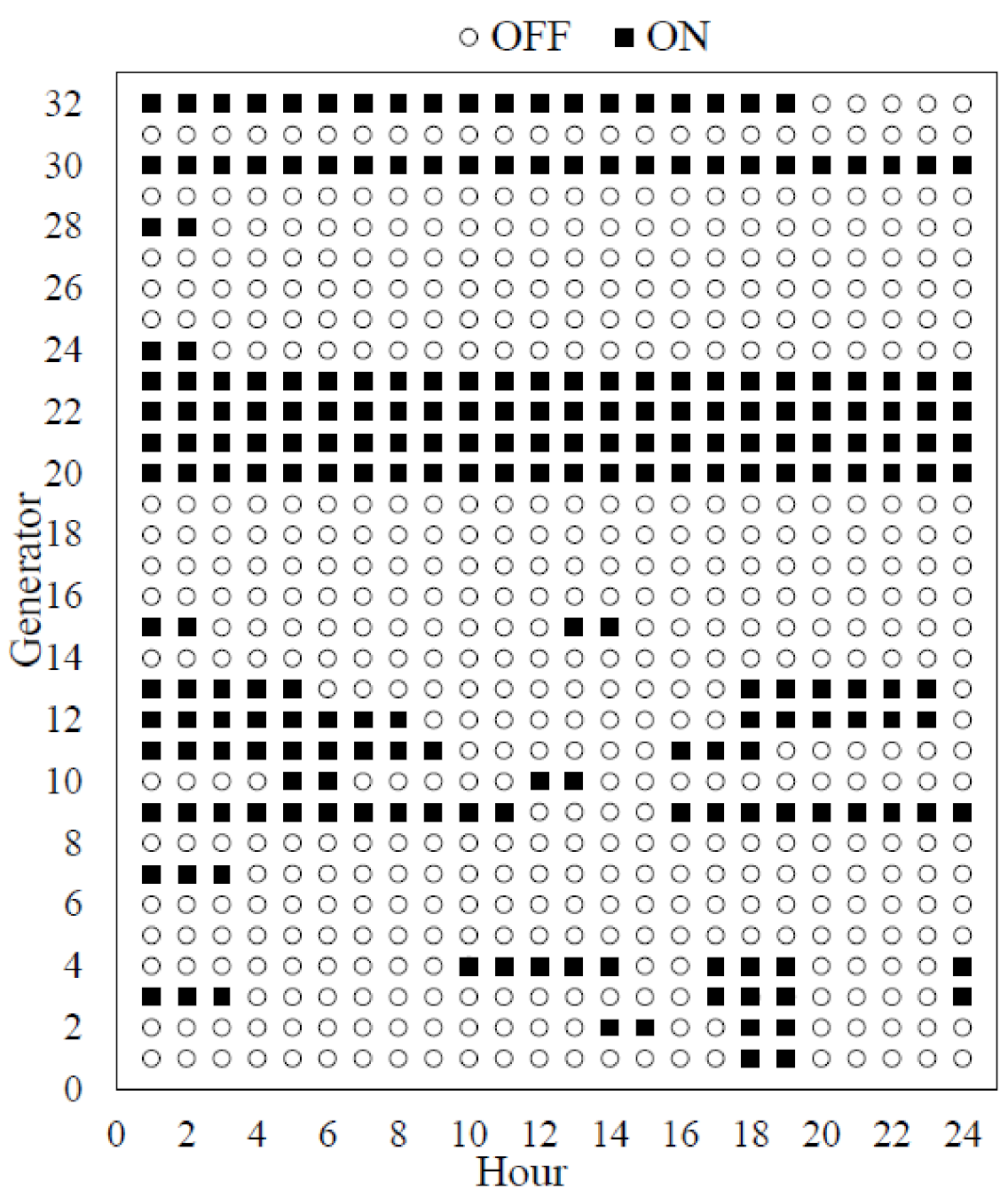
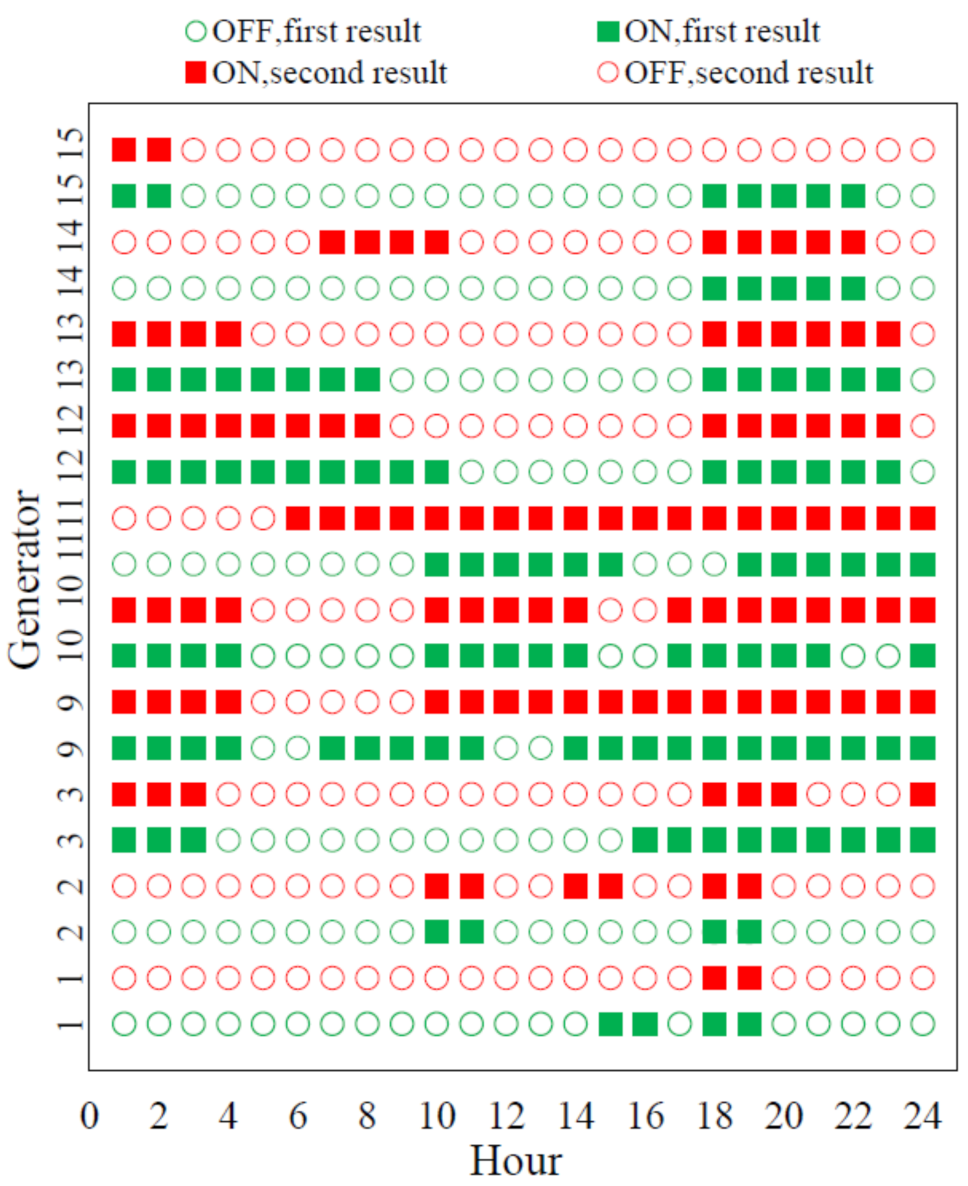
4.1. The Results of This Model
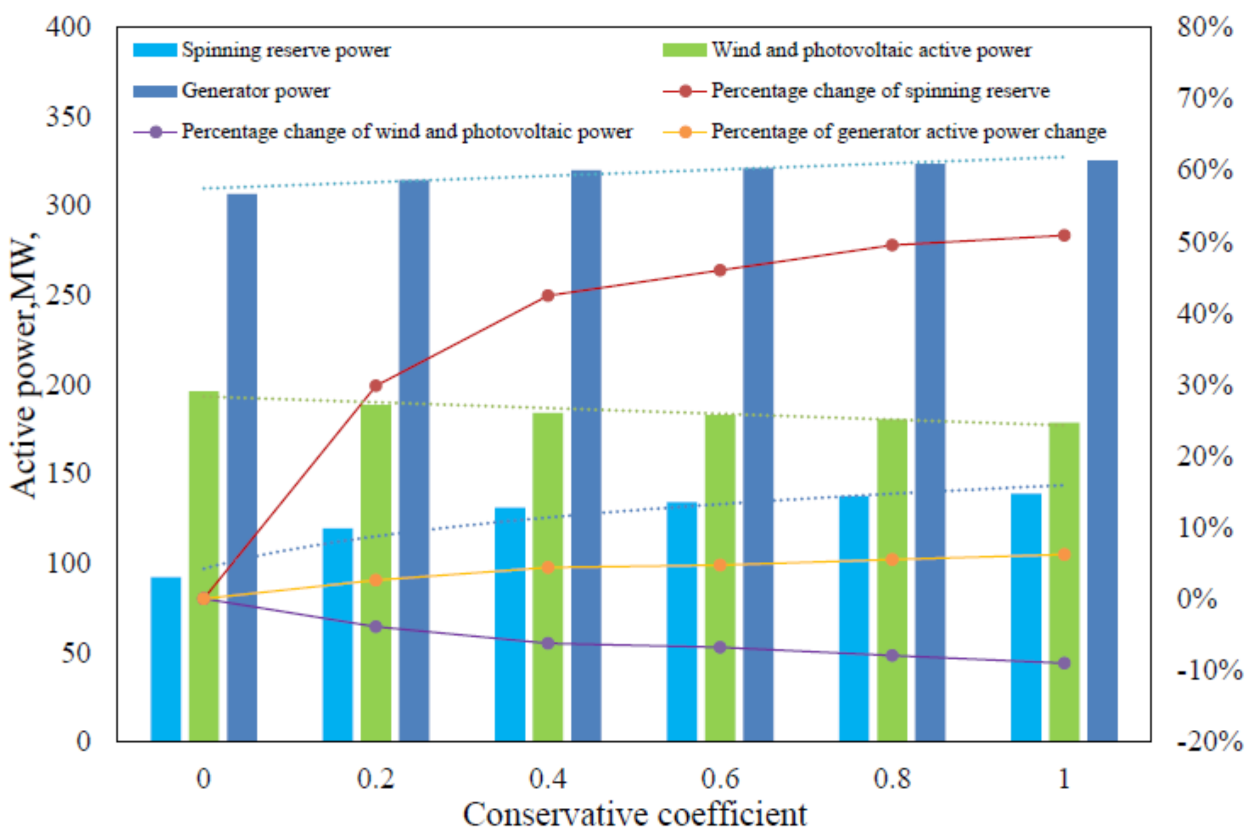
4.2. Influence of Conservative Coefficient on Objection
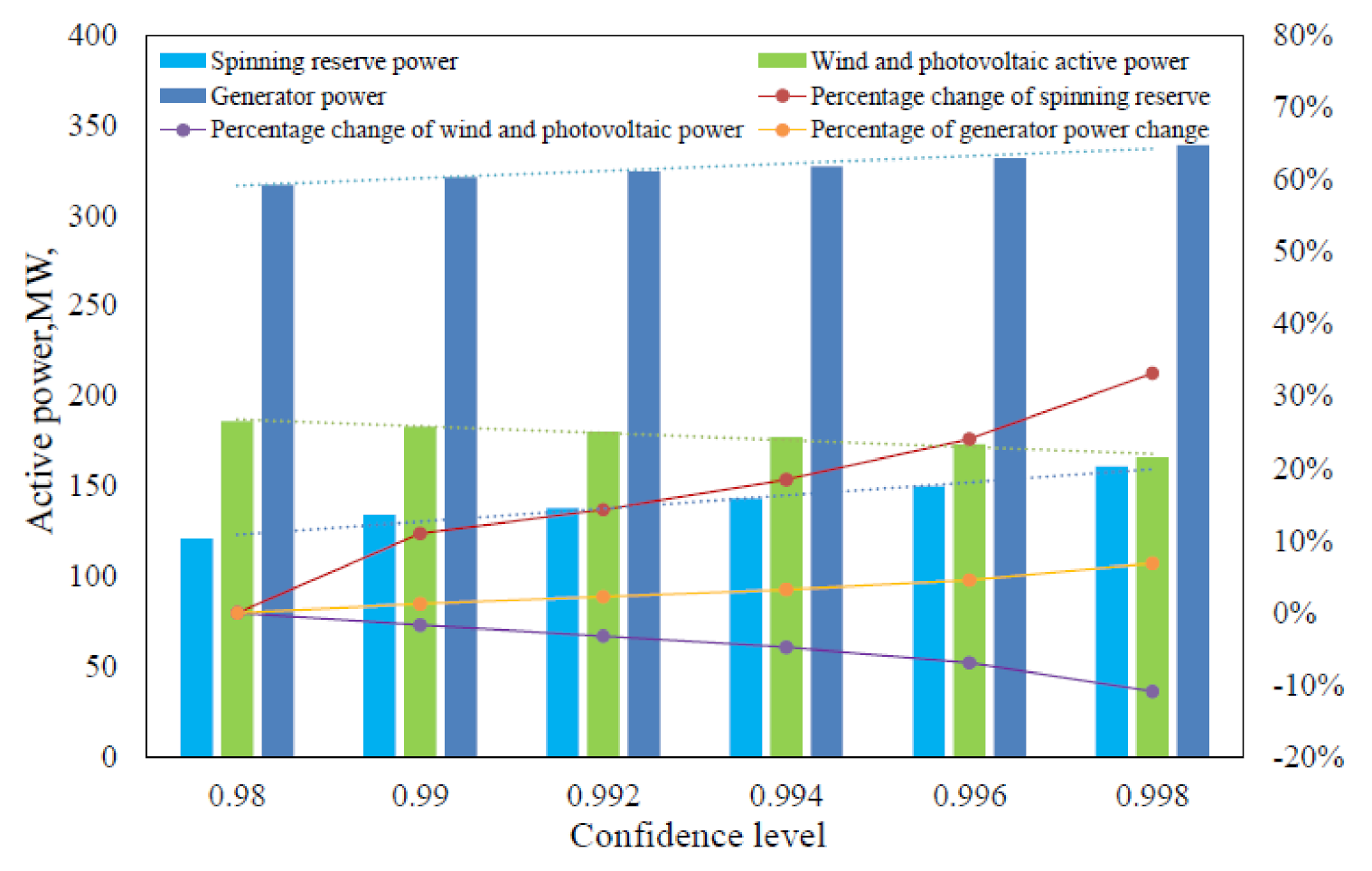
4.3. Influence of Confidence Level on Objection
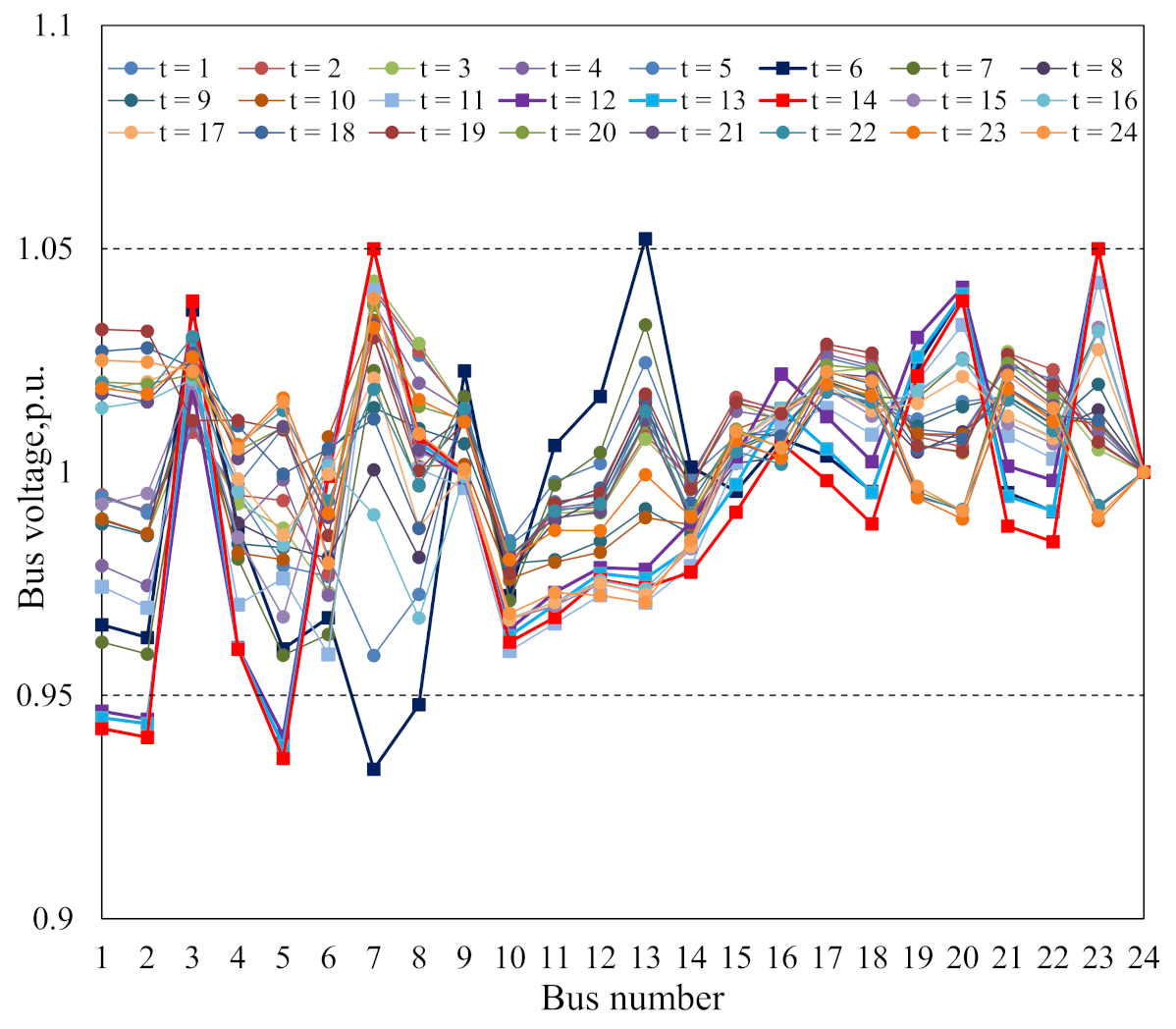
4.4. Influence of AC Power Flow on Optimization Results
4.5. Comparison with Stochastic Unit Commitment Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xia, Q.; Zhong, H.; Kang, C. Review and Prospects of the Security Constrained Unit Commitment Theory and Applications. Proc. CSEE 2013, 33, 94–103. [Google Scholar]
- Zhao, C.; Guan, Y. Data-Driven Stochastic Unit Commitment for Integrating Wind Generation. IEEE Trans. Power Syst. 2015, 31, 2587–2596. [Google Scholar] [CrossRef]
- Uckun, C.; Botterud, A.; Birge, J. An Improved Stochastic Unit Commitment Formulation to Accommodate Wind Uncertainty. IEEE Trans. Power Syst. 2015, 31, 2507–2517. [Google Scholar] [CrossRef]
- Wang, C.; Wei, H.; Wu, S. Stochastic-Security-Constrained Unit Commitment Considering Uncertainty of Wind Power. Power Syst. Technol. 2017, 41, 1419–1427. [Google Scholar]
- Wang, B.; Wang, S.; Zhou, X.; Watada, J. Multi-objective unit commitment with wind penetration and emission concerns under stochastic and fuzzy uncertainties. Energy 2016, 111, 18–31. [Google Scholar] [CrossRef]
- Wu, Z.; Zeng, P.; Zhang, X.-P.; Zhou, Q. A Solution to the Chance-Constrained Two-Stage Stochastic Program for Unit Commitment With Wind Energy Integration. IEEE Trans. Power Syst. 2016, 31, 4185–4196. [Google Scholar] [CrossRef]
- Bertsimas, D.; Litvinov, E.; Sun, X.A.; Zhao, J.; Zheng, T. Adaptive Robust Optimization for the Security Constrained Unit Commitment Problem. IEEE Trans. Power Syst. 2013, 28, 52–63. [Google Scholar] [CrossRef]
- Wu, W.; Wang, K.; Li, G. Affinely Adjustable Robust Unit Commitment Considering the Spatiotemporal Correlation of Wind Power. Proc. CSEE 2017, 37, 4089–4097. [Google Scholar]
- Xiong, P.; Jirutitijaroen, P. Two-stage adjustable robust optimization for unit commitment under uncertainty. IET Gener. Transm. Distrib. 2014, 8, 573–582. [Google Scholar] [CrossRef]
- Fan, L.; Wang, K.; Li, G.; Wu, W.; Ge, W. Robust Unit Commitment Considering Temporal Correlation of Wind Power. Autom. Electr. Power Syst. 2018, 42, 91–97. [Google Scholar]
- Xiong, P.; Jirutitijaroen, P.; Singh, C. A Distributionally Robust Optimization Model for Unit Commitment Considering Uncertain Wind Power Generation. IEEE Trans. Power Syst. 2017, 32, 39–49. [Google Scholar] [CrossRef]
- Zhao, C.; Jiang, R. Distributionally Robust Contingency-Constrained Unit Commitment. IEEE Trans. Power Syst. 2017, 33, 94–102. [Google Scholar] [CrossRef]
- Wang, Z.; Bian, Q.; Xin, H.; Gan, D. A distributionally robust co-ordinated reserve scheduling model considering CVaR-based wind power reserve requirements. IEEE Trans. Sustain. Energy 2016, 7, 625–636. [Google Scholar] [CrossRef]
- Xie, W.; Ahmed, S. Distributionally robust chance constrained optimal power flow with renewables: A conic reformulation. IEEE Trans. Power Syst. 2018, 33, 1860–1867. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Ding, T.; Wang, X. Conditional value at risk-based stochastic unit commitment considering the uncertainty of wind power generation. IET Gener. Transm. Distrib. 2018, 12, 482–489. [Google Scholar] [CrossRef]
- Xiong, P.; Singh, C. Optimal Planning of Storage in Power Systems Integrated with Wind Power Generation. IEEE Trans. Sustain. Energy 2015, 7, 232–240. [Google Scholar] [CrossRef]
- Yang, Y.; Lei, X.; Zhai, Q.; Wu, J.; Guan, X. Transmission capacity margin assessment in power systems with uncertain wind integration. In Proceedings of the 2017 13th IEEE Conference on Automation Science and Engineering (CASE), Xi’an, China, 20–23 August 2017. [Google Scholar]
- Tarnowski, G.C.; Kjær, P.C.; Dalsgaard, S.; Nyborg, A. Regulation and frequency response service capability of modern wind power plants. In Proceedings of the IEEE Power & Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010. [Google Scholar]
- Lin, Y.; Yang, M.; Wan, C.; Wang, J.; Song, Y. A Multi-Model Combination Approach for Probabilistic Wind Power Forecasting. IEEE Trans. Sustain. Energy 2019, 10, 226–237. [Google Scholar] [CrossRef]
- Luig, A.; Bofinger, S.; Beyer, H.G. Analysis of confidence intervals for the prediction of regional wind power out-put. In Proceedings of the European Wind Energy Association Conference, Copenhagen, Denmark, 1 January 2001; pp. 725–728. [Google Scholar]
- Tewari, S.; Geyer, C.J.; Mohan, N. A Statistical Model for Wind Power Forecast Error and its Application to the Estimation of Penalties in Liberalized Markets. IEEE Trans. Power Syst. 2011, 26, 2031–2039. [Google Scholar] [CrossRef]
- Hodge, B.; Milligan, M. Wind power forecasting error distributions over multiple time scales. In Proceedings of the Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011. [Google Scholar]
- Bruninx, K.; Delarue, E. A Statistical Description of the Error on Wind Power Forecasts for Probabilistic Reserve Sizing. IEEE Trans. Sustain. Energy 2014, 5, 995–1002. [Google Scholar] [CrossRef]
- Liu, M.; Zeng, C.; Miao, H. Unit commitment model based on distributionally robust chance constraints. Electr. Meas. & Instrum. 2021, 58, 32–36. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, L.; Chen, W.; Guo, C. Distributed Robust Unit Commitment with Energy Storage Based on Forecasting Error Clusting of Wind Power. Autom. Electr. Power Syst. 2019, 43, 3–12. [Google Scholar] [CrossRef]
- Wei, W.; Liu, F.; Mei, S. Distributionally Robust Co-Optimization of Energy and Reserve Dispatch. IEEE Trans. Sustain. Energy 2015, 7, 289–300. [Google Scholar] [CrossRef]
- Zhang, Y.; Shen, S.; Mathieu, J.L. Distributionally robust chance-constrained optimal power flow with uncertain renewables and uncertain reserves provided by loads. IEEE Trans. Power Systems 2017, 32, 1378–1388. [Google Scholar] [CrossRef]
- Liu, S.; Jian, J.; Wang, Y.; Liang, J. A robust optimization approach to wind farm diversification. Int. J. Electr. Power Energy Syst. 2013, 53, 409–415. [Google Scholar] [CrossRef]
- Wang, S.; Li, B.; Yu, J.; Xu, T. Analysis on Time-Varying Characteristics of Probability Error in Forecast of Wind Speed and Wind Power. Power Syst. Technol. 2013, 37, 967–973. [Google Scholar]
- Xie, L.; Gu, Y.; Zhu, X.; Genton, M.G. Short-Term Spatio-Temporal Wind Power Forecast in Robust Look-ahead Power System Dispatch. IEEE Trans. Smart Grid 2014, 5, 511–520. [Google Scholar] [CrossRef]
- Delage, E.; Ye, Y. Distributionally robust optimization under moment uncertainty with application to data-driven problems. Oper. Res. 2010, 58, 595–612. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.; Lisser, A.; Letournel, M. Distributionally robust stochastic shortest path problem. Electron. Notes Discret. Math. 2013, 41, 511–518. [Google Scholar] [CrossRef]
- Benders, J.F. Partitioning procedures for solving mixed-variables programming problems. Numer. Math. 1962, 4, 238–252. [Google Scholar] [CrossRef]
- Sha, Q.; Wang, W. Optimal Allocation of Energy Storage Considering N-1 Security Constraints Based on Chance Constraints. Adv. Eng. Sci. 2019, 51, 147–156. [Google Scholar]
- Lubin, M.; Dvorkin, Y.; Backhaus, S. A Robust Approach to Chance Constrained Optimal Power Flow with Renewable Generation. IEEE Trans. Power Syst. 2015, 31, 3840–3849. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Wei, H.; Wu, S. A Decomposition coordination Algorithm Applied to Hydro-thermal Unit Commitment Problems With Power Flow Constraints. Proc. CSEE 2017, 37, 3148–3161. [Google Scholar]
- Grigg, C.; Wong, P.; Albrecht, P.; Allan, R.; Bhavaraju, M.; Billinton, R.; Chen, Q.; Fong, C.; Haddad, S.; Kuruganty, S.; et al. The IEEE Reliability Test System-1996. A report prepared by the Reliability Test System Task Force of the Application of Probability Methods Subcommittee. IEEE Trans. Power Syst. 1999, 14, 1010–1020. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, D.; Lei, Q.; Du, Z.; Wang, J.; Zhou, L.; Huang, Y. Analysis of nuclear power plant participating in peak load regulation of power grid and combined operation with pumped storage power plant. Proc. CSEE 2011, 31, 1–6. [Google Scholar]
- Wang, B.; Yang, X.; Short, T.; Yang, S. Chance constrained unit commitment considering comprehensive modelling of demand response resources. IET Renew. Power Gener. 2017, 11, 490–500. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Node | Technology | (MW) | (MW) | (MW/h) | (MW/h) | UT (h) | DT (h) | Noload Costs (USD) | (USD/MW) | (USD/MW) | (USD/MW) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1–2 | 1 | OCGT | 20 | 8 | 90 | 100 | 2 | 1 | 454.6 | 28.97 | 29.24 | 29.70 |
| 3–4 | 1 | CCGT | 76 | 40 | 120 | 120 | 3 | 2 | 263.4 | 18.42 | 19.23 | 20.11 |
| 5–6 | 2 | OCGT | 20 | 8 | 90 | 100 | 2 | 1 | 454.6 | 28.97 | 29.24 | 29.70 |
| 7–8 | 2 | CCGT | 76 | 40 | 120 | 120 | 3 | 2 | 263.4 | 18.42 | 19.23 | 20.11 |
| 9–11 | 7 | CCGT | 100 | 10 | 420 | 420 | 4 | 2 | 306.6 | 17.59 | 18.28 | 18.96 |
| 12–14 | 13 | CCGT | 197 | 104 | 310 | 310 | 4 | 3 | 482.9 | 17.21 | 17.71 | 18.23 |
| 15–19 | 15 | OCGT | 12 | 5.4 | 60 | 70 | 2 | 1 | 365.5 | 29.46 | 30.13 | 30.86 |
| 20 | 15 | IGCC | 155 | 54.24 | 70 | 80 | 24 | 16 | 415.5 | 23.81 | 24.52 | 25.25 |
| 21 | 16 | IGCC | 155 | 54.24 | 70 | 80 | 24 | 16 | 415.5 | 23.81 | 24.52 | 25.25 |
| 22 | 18 | Nuclear | 400 | 100 | 280 | 280 | 168 | 24 | 188.3 | 6.96 | 7.23 | 7.50 |
| 23 | 21 | Nuclear | 400 | 100 | 280 | 280 | 168 | 24 | 188.3 | 6.96 | 7.23 | 7.50 |
| 24–29 | 22 | CCGT | 50 | 26 | 120 | 120 | 2 | 1 | 626.1 | 28.31 | 29.25 | 30.49 |
| 30–31 | 23 | IGCC | 155 | 54.24 | 70 | 80 | 24 | 16 | 415.5 | 23.81 | 24.52 | 25.25 |
| 32 | 23 | Coal | 350 | 140 | 140 | 140 | 8 | 5 | 303.8 | 26.21 | 26.71 | 27.20 |
| Power Flow | Reserve Cost/USD | Penalty Cost/USD | Fuel Cost/USD | Objection/USD | |
|---|---|---|---|---|---|
| 0.001 | AC | 91,968 | 13,595 | 572,691 | 627,738 |
| 0.2 | 119,377 | 44,340 | 593,714 | 710,645 | |
| 0.4 | 130,961 | 62,423 | 623,802 | 767,520 | |
| 0.6 | 134,236 | 66,844 | 629,503 | 780,846 | |
| 0.8 | 137,466 | 75,979 | 638,049 | 802,159 | |
| 1 | 138,750 | 84,398 | 640,529 | 814,397 | |
| 0 | DC | 91,968 | 13,223 | 568,113 | 625,064 |
| 0.2 | 119,377 | 43,340 | 592,763 | 708,703 | |
| 0.4 | 130,961 | 59,610 | 620,243 | 760,830 | |
| 0.6 | 134,236 | 63,431 | 626,464 | 774,388 | |
| 0.8 | 137,466 | 73,222 | 633,233 | 798,928 | |
| 1 | 138,750 | 80,420 | 639,155 | 809,511 |
| Power Flow | Reserve COST/USD | Penalty Cost/USD | Fuel Cost/USD | Objection/USD | |
|---|---|---|---|---|---|
| 0.02 | AC | 120,974 | 54,096 | 599,869 | 723,844 |
| 0.01 | 134,236 | 66,844 | 629,503 | 780,846 | |
| 0.008 | 138,253 | 78,032 | 634,329 | 802,046 | |
| 0.006 | 143,275 | 89,658 | 642,196 | 826,545 | |
| 0.004 | 150,083 | 105,532 | 657,015 | 865,024 | |
| 0.002 | 161,082 | 135,132 | 677,079 | 929,561 | |
| 0.02 | DC | 120,974 | 48,721 | 598,148 | 720,156 |
| 0.01 | 134,236 | 63,431 | 626,464 | 774,388 | |
| 0.008 | 138,253 | 74,450 | 630,581 | 794,805 | |
| 0.006 | 143,275 | 87,215 | 640,130 | 822,573 | |
| 0.004 | 150,083 | 105,532 | 657,015 | 865,024 | |
| 0.002 | 161,082 | 135,132 | 677,079 | 929,561 |
| Algorithm | Iterations | Master Problem/s | Subproblem/s | Total/s | |
|---|---|---|---|---|---|
| 0.02 | DRSCUC | 7 | 120 | 20 | 980 |
| 0.01 | 5 | 135 | 20 | 775 | |
| 0.008 | 4 | 150 | 20 | 680 | |
| 0.006 | 6 | 165 | 20 | 1110 | |
| 0.004 | 5 | 180 | 20 | 1000 | |
| 0.002 | 5 | 210 | 20 | 1150 | |
| 0.02 | CCSCUC | 5 | 300 | 20 | 1600 |
| 0.01 | 3 | 330 | 20 | 1050 | |
| 0.008 | 2 | 380 | 20 | 800 | |
| 0.006 | 4 | 440 | 20 | 1840 | |
| 0.004 | 3 | 520 | 20 | 1620 | |
| 0.002 | 4 | 600 | 20 | 2480 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sha, Q.; Wang, W.; Wang, H. A Distributionally Robust Chance-Constrained Unit Commitment with N-1 Security and Renewable Generation. Energies 2021, 14, 5618. https://doi.org/10.3390/en14185618
Sha Q, Wang W, Wang H. A Distributionally Robust Chance-Constrained Unit Commitment with N-1 Security and Renewable Generation. Energies. 2021; 14(18):5618. https://doi.org/10.3390/en14185618
Chicago/Turabian StyleSha, Qiangyi, Weiqing Wang, and Haiyun Wang. 2021. "A Distributionally Robust Chance-Constrained Unit Commitment with N-1 Security and Renewable Generation" Energies 14, no. 18: 5618. https://doi.org/10.3390/en14185618