1. Introduction
The control algorithms implemented in power electronic buck converters have improved the performance of this kind of system under nominal operation conditions, as explained in [
1]. One of these nominal conditions is considered in the design process, namely that the input voltage remains constant during the entire operation. However, there are some systems, such as photovoltaics and wind turbines, where it is necessary to use the power electronic buck converter, but the main problem is the variable voltage produced by the temporal obstructions of the sun and wind speed variation, respectively. In some cases, the maximum power point tracking (MPPT) method has been applied to mitigate the above effect, however, this method is focused on maximizing the power output to various systems under different conditions, as described in [
2].
In the literature, there are different control strategies to improve the behavior of power converters. For example, a robust optimal power management system for a micro-grid was explained in [
3]. In [
4], the authors described in detail how sliding mode controllers can be practically engineered to optimize the control of power converters. In [
5], the fractional-order terminal sliding-mode control, which has a new fractional-order sliding surface and assures the finite time convergence of the output voltage error to the equilibrium point during the load changes, is presented. Other interesting approaches of the sliding mode control technique for the power electronic converter were explained in [
6,
7,
8,
9,
10]. In [
11], the stability properties and results were given for the steady-state control error offset induced by stationary high-frequency measurement disturbances while operating the control loop close to saturation. In [
12], the authors presented diverse alternative methods for the control of power electronic converters applying fractional order control. The controller was carried out by the design of a linear controller for the buck converter and the fractional calculus was proposed to determine the switching surface applying a fractional sliding mode control scheme to the control of such devices. In [
13], a comparison between different techniques for the design and implementation of closed-loop control systems for buck converters was carried out. Controllers used for this comparison were integral, proportional plus integral controllers and artificial intelligence was represented in the fuzzy logic controller. Optimal switching between different topologies in step-down direct current–direct current (DC-DC) voltage converters, with non-ideal inductors and capacitors is presented in [
14]. A backpropagation neural network to fit the input–output relationship of the offline control laws under different operating points was proposed in [
15]. In [
16], a mixed-logic dynamic model and control method based on mode selection were proposed for the buck converter. A novel fast model predictive control methodology based on linear parameter varying systems was explained in [
17]. In [
18], the authors presented a fuzzy logic controller that performs the output voltage regulation of a DC/DC buck power converter. Other interesting approaches of the fuzzy logic control technique for power electronic converters were explained in [
19,
20,
21].
In general, most control strategies do not take into account changes in input voltage, which in combination with a control strategy with integral action, could produce the undesired windup effect in a buck converter. In other words, the windup effect refers to the situation in a PID controller where a large change between the set-point and the output system occurs for a relatively long time; consequently, the integral term accumulates a significant value and the specific problem is the excess overshooting. In [
22], the main causes of this effect are described in the control context: the author explains that if the control contains integral action, input saturation can give rise to large and poorly decaying overshoots in the transients, which must be avoided. In the literature, there are control algorithms proposed to prevent the windup effect; for example, in [
23], the authors focused on the anti-windup control problem for plants with input saturation, and a delayed decoupling structure was first proposed; then, appropriate linear matrix inequalities were developed to determine a plant-order anti-windup compensator. In [
24], a unified framework was presented for the study of linear time-invariant systems subject to control input nonlinearities. The framework was based on the following design paradigm: designing the linear controller ignoring control input nonlinearities, and then adding anti-windup bumpless transfer compensation to minimize the adverse effects of any control input nonlinearities on closed-loop performance. In [
25], a design method of robust disturbance feedback control was proposed by a linear matrix inequality, with industrial refrigeration system applications. The important aspects of anti-windup designs, namely the parametrization of linear anti-windup compensators, and the role of artificial nonlinearity in the design of anti-windup compensators for multivariable systems, were in presented [
26].
The above control strategies improved the behavior of the buck converter; however, the simplicity to implement these controllers is an important topic for industrial applications. In this context, the proportional–integral–derivative controllers were the most adopted in industrial settings because of the advantageous cost–benefit ratio they are able to provide, as explained in [
27]. Furthermore, in the literature, there are different variations of the proportional–integral–derivative controllers to improve the performance of the buck converter system. For example, in [
28], the nonlinearity of a saturation was taken into account in a model of DC-DC buck power converters, for which a Lyapunov function-based class of proportional–integral with anti-windup algorithms was given. In [
29], an internal model control-based anti-windup compensator was designed for nonlinear systems subjected to time-varying delay and input saturation. A robust nonlinear dynamic anti-windup compensator design for nonlinear systems with parametric uncertainties and one-sided Lipschitz nonlinearities under actuator saturation was presented in [
30]. In [
31], we proposed a proportional–derivative controller with a saturation function where the parameters are variable, in order to improve the closed-loop system when there are time-variant disturbances; considering the previous work, we proposed a nonlinear PID controller to avoid the windup effect, which appears when the input voltage of the buck converter is time-variant. In summary, the contribution of this work focuses on:
A novel nonlinear PID controller to avoid the windup effect;
Simulation and experimental results to show the main advantage of the proposed controller;
Comparative results between the behavior produced by classical PID and nonlinear PID controllers.
The paper is organized as follows. In
Section 2, we describe the buck converter system and the design method to obtain its parameters.
Section 3 presents the proposed nonlinear PID controller. The simulation results are given in
Section 4. Finally, the conclusions and recommendations for future work are summarized in
Section 5.
2. System Description
The buck converter system is a very simple type of DC-DC converter that produces an output voltage (
) that is less than its input voltage (
). In this section, we describe the general form of that the design process takes to obtain the parameter of the power electronic DC-DC converter and its behavior in the presence of changes in the input voltage.
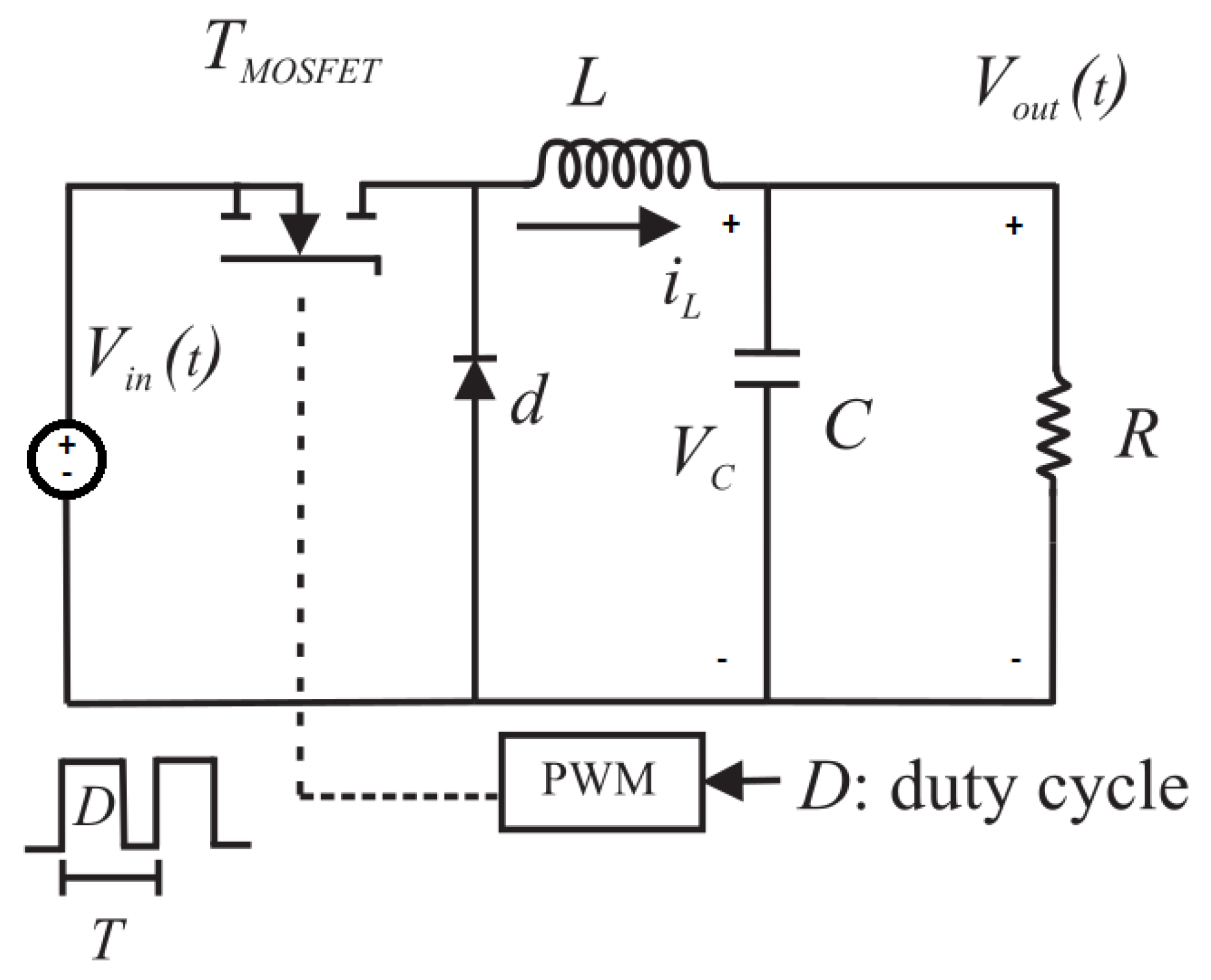
Figure 1 shows the topology of a buck converter, where it notices that this DC-DC converter is composed by a switch power
, an inductance
, a diode
, a capacitor
and a load—in this case a resistance
. The main goal of the buck converter is to regulate the capacitor voltage
, where the load is connected, as for this the switch the power is manipulated by a pulse width modulation (PWM) signal with a constant period (
T), as explained in [
1].
Then, taking into account the general equations for the process design of a buck converter system, as explained in [
1], we obtained the parameters that are shown in
Table 1, assumed that the system is operating under nominal conditions.
Now, in order to validate the obtained parameters, for a buck converter system, we performed the simulation using the
Simscape libraries of Matlab-Simulink, with
V. The output voltage of the buck converter system with 75% of PWM signal duty cycle is
, as shown in
Figure 2. Observe that the output voltage
converges to the desired value—which is
V. Furthermore, notice that in the beginning, there is an overshoot by which we could avoid changing the resistance value by a lower one, but as a consequence, the power increases—more details can be found in [
1]. Then, to retain the design power, we will keep the obtained parameters.
In general, the performance of the buck converter is acceptable from a practical point of view. Now, in order to show the buck converter behavior, with a constant PWM signal duty cycle, the input voltage (
) changes as follows:
where the values were arbitrarily chosen, considering that in a time interval
is smaller than
. In
Figure 3, we observe the obtained output voltage (
) when
is an input time-varying voltage, and notice that the behavior is degraded. Therefore, we propose a control algorithm for the case of the set-point regulation of the buck converter output voltage when there is an input time-varying voltage.
Notice that, normally, the buck converter system is operated with a constant input voltage; however, when is obtained from a wind turbine or a photovoltaic power system, the input voltage could be variable, then a control algorithm is needed to manipulate the duty cycle of the PWM signal to obtain the desired output voltage.
3. Control Strategy
A possible solution to improve the behavior of the buck converter, when there is an input time-varying voltage, is to manipulate the PWM signal duty cycle with a control strategy. In
Figure 4, note that the diagram of the buck converter system with control action is in this case a closed-loop system.
There are a wide variety of control strategies that have been implemented in a buck converter system as we described in the Introduction section. However, proportional–integral–derivative (PID) controllers are the most adopted in industrial settings because of the advantageous cost–benefit ratio they are able to provide. The mathematical expression of a classical PID controller is given by the following equation:
where
represent the proportional, integral and derivative gains, respectively, and
represents the error, which is defined as
The PID controller has the disadvantage that under some operation conditions, this controller generates the windup effect. In the case of the buck converter, this effect is produced when the input voltage (
) is smaller than the desired voltage (
) in a interval time, as the example that we show in Equation (
1), when
V in the interval time
s, such that the integral term increases to a relatively large value.
Consequently, we propose implementing a nonlinear PID controller based on saturation functions with variable parameters, which has the same advantage as the classical PID controller, a low computing cost and a simple tuning task to implement the control strategy in an embedded system, but in addition, the nonlinear PID controller also avoids the windup effect. Then, let
be a saturation function for
; notice that
and
are constant and also positive definite, given by the following equation:
where
is the gain, and
is the parameter chosen to limit the values of any function represented by
. Observe that
,
and
represent the error, its integral and derivative, respectively. Then, in order to improve the behavior of the closed-loop system and to avoid the windup effect, the PID controller defined by Equation (
2) can be modified by implementing the above saturation functions in each term, as follows:
Now, Equation (
5) can be rewritten in a compact form as
where
for
represents the saturation of the proportional, integral and derivative control action, respectively. Then, applying Equation (
4) we can rewrite
as follows:
To introduce a modification of saturations (
7), let us consider the point of
where
=
, which is:
then, we define:
as consequence, we have that:
According to Equations (
9) and (
10), we can express (
7) as follows:
where the tuning parameters of the controller are
and
, ∀
. To express Equation (
11) in terms of
, when
, we consider that:
then:
and considering that
=
, then Equation (
11) can be rewritten as
Finally, the law control given by Equation (
5) can be represented as
with:
The advantage of this controller is that the gains change in function of the error, its integral and derivative action; however, in a small region defined by the parameters
and
, these gains are constant. Therefore, it is easy to choose the parameters
and
taking into account the region where
is a constant value. However, the maximum control input value is limited by the parameters
,
and
; thus, in order to override this limitation, we propose that the saturation parameter
, from Equation (
14), changes as follows:
Then, by introducing Equation (
19) into Equation (
14) we obtain:
Consequently, from Equation (
20), we obtain a nonlinear PID controller as follows:
with:
Notice that the controller obtained in Equation (
21) is the proposed PID controller based on saturation functions with variable parameters, which we called the nonlinear PID controller. To show the behavior of the variable gains given by Equations (
22)–(
24), we plotted an example considering that the error value
is increases from
to 50 in 100 s, with
,
,
,
,
and the derivative error value increasing from
to 25 in 50 s, with
,
,
—as shown in
Figure 5a–c, respectively.
5. Experimental Results
For practicality reasons, we used an Arduino UNO target, as depicted in
Figure 18, to implement the classical PID and the proposed nonlinear PID controllers; the pseudocode of the embedded algorithm for the experiments is presented in Algorithm 1. The components’ values were computing as explained in
Section 2; however, the values of
L and
C were adjusted to standard values of
H and
F, respectively.
| Algorithm 1: Embedded algorithm to implement the control strategy. |
| Initiation: |
| 1.- Define the frequency of PWM signal (5000 Hz) |
| 2.- Define the gains , and . |
| 3.- Define the gains parameters , , , , , , , and . |
4.- Measure the input analogue voltage and compute error value:
|
| 5.- Alfa-Beta filter to reduce the noise of e and estimate its derivative (). |
6.- Estimate the integral value using the Sampling Period ():
|
7.- Choose the controller (1 or 2) to obtain the PWM value:
CASE 1: Classical PID controller, this is:
=
CASE 2: Nonlinear PID controller, this is:
Compute the variable gains , and with:
= |
| 8.- Send signal to MOSFET |
| 9.- Acquire and save data responses in a text file |
| 10.- If time < 3600 s then return to step 4 |
| 11.-END |
From the simulation results, notice that the main advantage of the proposed nonlinear PID controller is that in the case of scenario 2—therefore, for the experimental results, we only show this case. The gains for the classical PID and the nonlinear PID controllers were tuned again for the experimental implementation, as shown in
Table 6 and
Table 7, respectively.
For the experiments, the input voltage was changed twice, first from 12 to 6 volts during approximately 10 s and after from 6 to 12 volts, as depicted in
Figure 19. Then, the obtained output voltage implementing a classical PID controller was shown in
Figure 20. Notice that the windup effect was presented as we obtained in the simulation results. The control input to generate the duty cycle of a PWM signal using a classical PID controller was shown in
Figure 21. Notice that the duty cycle for the Arduino target was operated from 0 to 255.
The input variable voltages for the second experiment are shown in
Figure 22, where we observe that the change in input voltage was manually performed in the mode moving the rotary switch knob. The obtained output voltage implementing the proposed nonlinear PID controller is shown in
Figure 23, in which we note that the output voltage (
) converges to the desired value without the windup effect; consequently, the proposed nonlinear controller does not allow wasting the energy in the buck converter system. The control input to generate the duty cycle of a PWM signal using the proposed nonlinear PID controller is shown in
Figure 24.
Now, to observe the main advantage of the proposed controller, we compute the
,
and
values before and during the disturbance. In
Table 8, we show the obtained results for the classical PID and nonlinear PID controllers from 0 to 10 s, when the buck converter system is operating under nominal conditions. We note that, in this case, the obtained results are close for both controllers.
Finally, the obtained
,
and
values computed during the disturbance, from 20 to 60, for the both controller, are shown in
Table 9. With the obtained results, we can conclude that the proposed nonlinear PID controller improved the performance of the closed-loop system.
6. Conclusions
The experiments and simulation results elucidated the robustness of the proposed nonlinear PID controller in the presence of a changing input voltage produced by renewable energy systems where the main energy source is not constant during the operation, as is the case in the photovoltaic and wind turbine low-power systems. In general, based on the obtained results, we can conclude that the performance of the nonlinear PID controller is acceptable from a practical point of view.
The main advantage of the proposed control strategy is to avoid the windup effect, which is normally produced by the integral term under some operation conditions, in this case, when the input voltage is less than the desired voltage for a relatively long time. Notice that, in the obtained results, when implementing a classical PID controller, the windup effect appears even if we use relative small gains.
The main characteristic of the proposed nonlinear PID controller is the mathematical representation given by Equations (
21)–(
24). Observe that the proposed controller is relatively easy to implement in any embedded systems, given that the variable gains are computed with basic arithmetic operations.


 ,
, 
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}