Abstract
Since most of our industries use induction motors, it is essential to develop condition monitoring systems. Nowadays, industries have power quality issues such as sag, swell, harmonics, and transients. Thus, a condition monitoring system should have the ability to detect various faults, even in the presence of power quality issues. Most of the fault diagnosis and condition monitoring methods proposed earlier misidentified the faults and caused the condition monitoring system to fail because of misclassification due to power quality. The proposed method uses power quality data along with starting current data to identify the broken rotor bar and bearing fault in induction motors. The discrete wavelet transform (DWT) is used to decompose the current waveform, and then different features such as mean, standard deviation, entropy, and norm are calculated. The neural network (NN) classifier is used for classifying the faults and for analyzing the classification accuracy for various cases. The classification accuracy is 96.7% while considering power quality issues, whereas in a typical case, it is 93.3%. The proposed methodology is suitable for hardware implementation, which merges mean, standard deviation, entropy, and norm with the consideration of power quality issues, and the trained NN proves stable in the detection of the rotor and bearing faults.
1. Introduction
The squirrel cage induction motor has a wide range of applications such as pumping, cooling, compressing, etc., in the industrial area because of its simple construction, low cost, and high reliability. The quality and shape of the industrial product mostly depends on motor performance. Generally, the performance of the motor is measured in terms of speed and torque. Different kinds of motors have been constructed with two main parts, namely the rotor (a rotating part) and stator (a stationary part) [1]. These motor parts can be damaged due to unbalanced current regulation and stress. This motor damage, especially in squirrel cage induction motors, can be classified into three major faults, including rotor fault, winding fault, and bearing faults, as well as some minor faults. Among the various kinds of faults, the occurrence of a broken rotor fault is measured as 10%, and the event of a bearing fault is measured as 40–50%, which is shown in Figure 1 [1].
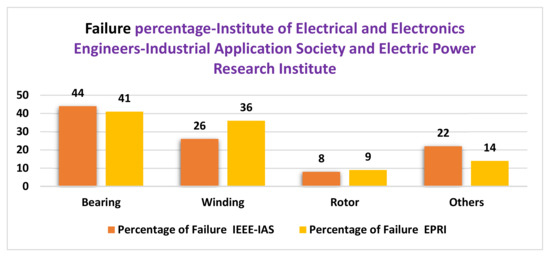
Figure 1.
Percentage of failures in an induction motor.
The occurrence of a broken rotor fault mostly happens due to unavoidable stress associated with the motor application. Rotor bars may crack, completely or partially, during operation of the motor. Once the rotor bar breaks down, it affects the production of the operation and puts stress on the neighboring rotor, which leads to progressive deteriorates of rotors. Thus, early detection of a broken rotor fault is essential for the whole system as well as for production [2,3]. Thermal magnetic stress, dynamic rotor unbalance, and mechanical stress are some of the main factors for broken rotor faults. This leads to unbalanced current and torque pulsations that result in a decrease in average torque. Motor current signature analysis (MCSA) is one of the methods for detecting braking rotor faults. The start-up current and the steady-state current are the parameters considered for fault detection in the MCSA method. However, this method fails to detect the fault when the motor operates using variable frequency drives. The use of variable frequency drives (VFD) causes harmonics in the supply, and this is the major drawback of using the MCSA method [4]. On the other hand, the majority of the faults in electrical machines are mechanical imbalance and bearing faults [5]. Rolling bearings are used in reciprocating and rotating machinery. Bearing are critical mechanical components, because proper functioning of the equipment depends on the smooth running of the bearings [6]. If bearing faults are not detected in time, this may cause malfunctions and reductions in efficiency and may also lead to catastrophic failure. Recent research has mainly focused on the detection of bearing fault using MCSA [7,8,9].
Mechanical signals cannot be directly acquired, since the application is in a noisy environment with shocks and vibrations. Under such situations, electric signal measurements are preferable, since they are more immune to mechanical disturbances. Although thermal and vibration analysis has been carried out decades for condition monitoring of an induction motor, most research has been online monitoring of induction motors, which is based on stator current analysis [10] and is suitable for non-intrusive condition monitoring [11,12]. Stator current data collected from faulty motors are different from healthy motors. The stator current monitoring method is considered a vital fault detection method, since it does not require any special access to a motor [12]. Recently, a neural network-based soft computation approach has been used in fault detection of an induction motor. The output of an induction motor for detection of faults is compared with the neural network. Several neural network types, such as self-organizing maps and modified backpropagation models, were proposed [13,14]. An approach based on the Bayesian network has been used to evaluate the residuals. The approach was applied to fault detection in a three-phase induction motor [15]. The condition of an induction machine was monitored using neural network modelling, which is explained in [16], and fault detection and diagnosis were also made by an artificial neural network [17], and even incipient fault detection was done using a multi back propagation (MBP) algorithm [18]. None of the existing fault detection methods considered power quality issues present in the supply of an induction motor.
In this paper, an effective fault detection scheme is proposed to find the bearing and rotor faults of an induction motor during the presence of various power quality issues (sag, swell, harmonics, and transients) in the supply. This is different than in existing methods, in which power quality issues are not considered during fault detection, which results in low accuracy. The decomposition level of the motor with healthy, rotor fault, and bearing fault is analyzed in Section 2. The neural network-based fault detection algorithm modulated with and without power quality issues is introduced in Section 3. In Section 4, the output, such as mean, standard deviation, entropy, and norm, from the existing and proposed method are discussed and analyzed with accuracy. The best fault detection method is analyzed based on the accuracy level that is represented as the confusion matrix.
2. Theoretical Background, Materials and Methods
The main objective of this proposed work is to detect rotor and bearing fault, and a neural network is used to quantify the fault. An experimental study was performed to evaluate the performance of the fault diagnosis method on a 70 W, 230 V, 0.35 A, and 50 Hz squirrel cage induction motor, as shown in Table 1. The methods proposed earlier did not consider power quality (PQ) issues in the rotating machine, but in this proposed novel method, all the PQ issues were considered, and the fault was detected accurately. In this proposed work, a total of three squirrel cage induction motors were tested. One of the induction motors was in a healthy condition, which was used for comparison purposes, whereas the remaining was faulted, as shown in Figure 2.

Table 1.
Specifications of induction motor used.

Figure 2.
(a) Healthy motor, (b) motor with rotor fault, (c) motor with bearing fault.
The block diagram of the existing method and the proposed NN-based fault classification method is shown in Figure 3. In this section, the procedure for acquiring data signals from the motor and for making a decision for fault detection is explained.
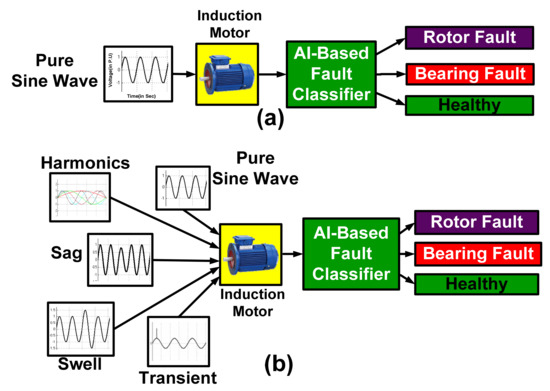
Figure 3.
Block diagram of (a) the existing method and (b) the proposed neural network (NN) −based fault classification method.
A variable is used to start the induction motor in a smooth manner. An experimental setup of an induction motor connected with a controller is used to collect the current signal. A database consisting of current signals obtained from real-time experimental data is used for fault identification and diagnosis. In order to validate the given data, the samples are collected repeatedly up to 3 times. The stator currents are measured using DAQ, and the data from DAQ are stored in the computer through the network. Unfiltered stator current equivalent to 0.2 s only undergoes wavelet decomposition. Figure 4 shows the various steps in the proposed method considering with PQ issues, such as voltage sag, swell, harmonics, and transients, and without PQ issues.
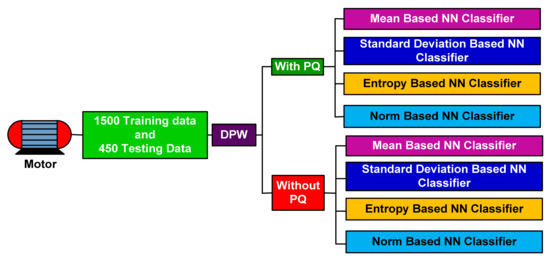
Figure 4.
Process in the proposed method.
Based on the above specifications, the starting current signal was sampled, and the sampled data were input to the wavelet tool in MATLAB. Wavelet h-parameters for five-level coefficients were determined for healthy rotor fault and bearing fault conditions. A healthy and faulty motor show different values for the decomposition level. Figure 5 shows the five-level decomposition, namely dB1, dB2, dB3, dB4, and dB5 of the healthy rotor fault and the bearing fault of the induction motor. Mean, standard deviation, entropy, and norm values were found for the wavelet parameters. While considering input, the power quality issues like the voltage, sag, swell, harmonics, and transient conditions were also considered. Then the neural network controller trained by the given range of data (considering power quality issues without considering power quality issues), and results were compared. The target values were set for healthy, rotor fault, and bearing faults as 1, 2, and 3 respectively.
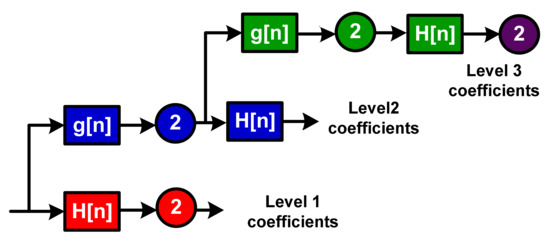
Figure 5.
Pictorial representation of wavelet propagation.
An artificial neural network (ANN) is an information processing architecture inspired by the biological nervous system. The key element of this processing system is the neurons that are interconnected in large numbers. ANN’s can be used to solve specific problems like pattern recognition and data classification. The process structure of a feedforward NN is shown in Figure 5. ANN learns by example, and learning in biological systems involves adjustments to the synaptic connections that exist between the neurons.
In this proposed work, without considering power quality issues, current samples like mean, standard deviation, entropy, and norm were used to train the neural network. A neural network is a group of connected input/output units and has associated weight with computer programs. The feed forward back propagation network type was selected. Backpropagation is a method of fine-tuning the neural network based on the error rate obtained from the previous iteration. Nodes never form a cycle in a feedforward network. Recurrent backpropagation is fed forward until fixed. This method helps to calculate the gradient of a loss function with respect to all weights in the neural network. The Levenberg–Marquardt algorithm is used as an adaptation learning function, and the performance function has the form of a sum of squares. The Hessian matrix is approximated as
and the gradient can be computed as
where H is the Hessian matrix, J is the Jacobian matrix, and e is the vector of errors. The performance function measures network performance according to the mean of squared errors. The TANSIG transfer function is used to calculate layers output from its net input. For training purposes, 10 neurons and 2 layers were selected.
H = JTJ
G = JTe
Wavelet transform is applied in various branches of engineering because of its characteristic of detailing signal specific points [19,20]. For applications that require very high precision frequency analysis of stator current, the traditional Fast Fourier transform FFT does not yield satisfying results, and it does not have the ability to pinpoint the region of interest from the signal. The startup current method is useful for detecting rotor and bearing faults in squirrel cage induction motors. In wavelet analysis, signals with short duration energy functions are analyzed, in which the considered signal is transformed into a useful form. A signal f(t) is assessed, and it can be written as
where l is an integer index for finite or infinite sum, and al and are the real value expansion coefficient and expansion set, respectively. If (1) is unique, then the set is a basis for the class of functions, which can be expressed as
Then, the coefficients can be calculated by the inner product and can be given as
A dual basis set exists using (3) only if the basis set is not orthogonal. For wavelet expansion, (1) becomes
where j and k both are integer indices and are wavelet expansion functions that form an orthogonal basis. There are various wavelet expansion functions available for useful analysis of signals, and the choice of wavelet depends on a particular type of application. If the wavelet matches the shape of the signal at a particular scale and location, then higher transform values are obtained. The ability to modify the frequency resolution makes it possible to detect the features of the disturbance system. The capability of wavelets to spotlight a short time interval of high-frequency components helps to analyze the signals with localized oscillations in the presence of fundamental and lower order harmonic signals more accurately. Wavelet is a powerful time–frequency method to analyze a signal within different frequency ranges by means of dilating and translating a function and is implemented using a multi-resolution signal decomposition algorithm for decomposing a signal into scales with different time and frequency resolutions [21]. The sampled signal is decomposed into its smoothened version containing lower frequency components and a detailed version containing high-frequency components using filters such as g(n) and h(n), respectively, a pictorial representation of which is shown in Figure 6. Next level decomposition is based on the previous component, and the five-level decomposition of healthy, rotor fault, and bearing fault is shown in Figure 7.
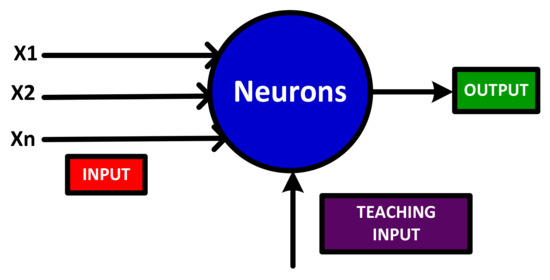
Figure 6.
Feed forward neural network.
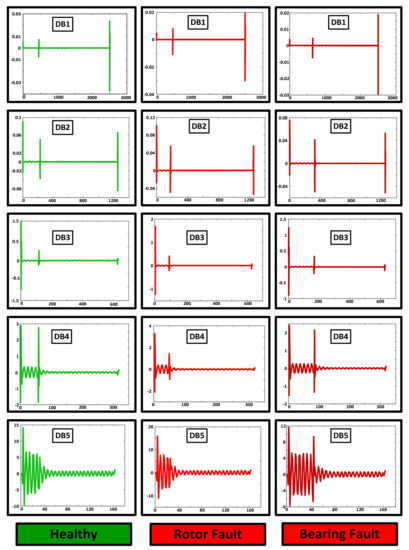
Figure 7.
Five level decompositions of a healthy and faulty motor.
3. Results
Table 2 lists the percent accuracy of results obtained during the training stage by the feedforward backpropagation technique. Without considering power quality issues in norm-based analysis percent, accuracy was 94.7, whereas entropy-based analysis accuracy was 92.8%. Percent accuracy of mean and standard deviation was 91.7%. Out of 1500 samples, only 79 samples were wrongly classified, but 125 samples in mean and standard deviation. During the training of the same 1500 data with the consideration of power quality issues, the percent accuracy of the norm-based analysis increased to 98.3; only 28 samples were wrongly classified, whereas entropy-based analysis was 95%, and 75 samples were wrongly classified. During training, 50 samples of mean were misclassified as healthy instead of rotor fault, and 40 samples of standard deviation were misclassified as healthy. Fifty samples of the mean were misclassified as healthy instead of bearing fault.
Table 2.
Comparison of various classifiers during the training stage.
Exactly 450 samples were used to test the same network, and performance parameters were noted. Similarly, considering power quality issues, 1500 current samples’ mean, standard deviation, entropy, and norm were used to train the neural network, and 450 samples were used to test the same network. Performance parameters were noted, and results were compared with the results for which power quality issues were not considered. Table 3 lists the percent accuracy of results obtained during the testing stage. Without considering power quality issues in norm-based analysis, percent accuracy was 93.3%, whereas entropy-based analysis accuracy was 91.6%. Percent accuracy of mean and standard deviation was 87.8% and 90%, respectively. Out of 450 samples, only 14 samples were wrongly classified, but 55 samples in mean and standard deviation. During testing of the same 450 data with the consideration of power quality issues, the percent accuracy of the norm-based analysis increased to 96.9; only 14 samples were wrongly classified, whereas entropy-based analysis was 94.7%; 24 samples were wrongly classified. During testing, 30 samples of mean is misclassified as healthy instead of rotor fault, and 6 samples of standard deviation are misclassified as healthy. Fifty samples of mean were misclassified as healthy instead of bearing fault. Figure 8 and Figure 9 show the training and testing data confusion matrix considering with and without PQ of mean, STD, entropy, and norm.
Table 3.
Comparison of various classifiers during testing stage.
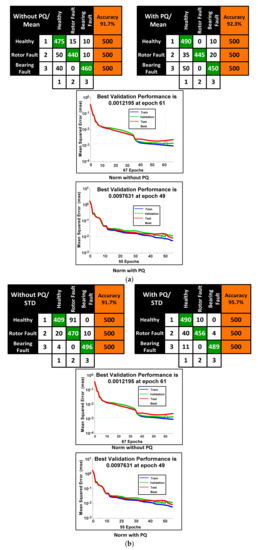
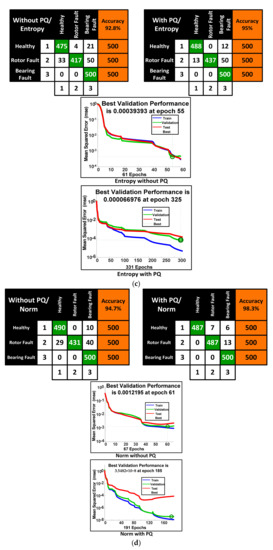
Figure 8.
Confusion matrix of training data with and without power quality for (a) mean, (b) standard deviation, (c) entropy, and (d) norm.
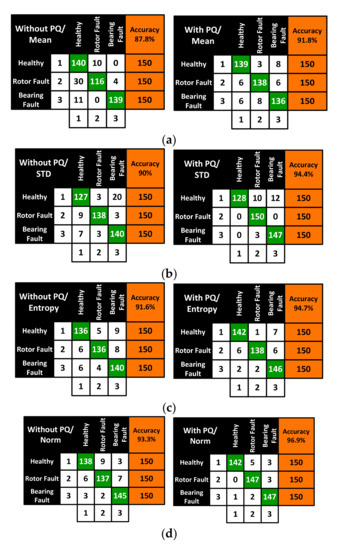
Figure 9.
Confusion matrix of testing data with and without power quality for (a) mean, (b) standard deviation, (c) entropy, and (d) norm.
The comparisons of the existing methods, such as time–domain methods, frequency–domain methods, hybrid time–frequency–domain analysis algorithms, and park transform with the MFN method [22,23], with the proposed method, are shown in Table 4. From Table 4, it is clear that the proposed methodology gave better results than the existing methodologies.
Table 4.
Comparison between the proposed technique and the existing techniques.
4. Conclusions
The existing methods for the fault detection of an induction motor did not consider the power quality issues present in the supply, which result in poor accuracy. In this paper, an effective fault detection scheme is proposed to find the bearing and rotor faults of an induction motor during the presence of various power quality issues (sag, swell, harmonics, and transients) in the supply. The DWT is used to decompose the current waveform, and a neural network is used to classify the faults. Mean, standard, deviation, entropy, and norm-based classifications are analyzed for various cases with and without PQ issues. A comparison of the proposed work with existing techniques is made with and without consideration of power quality issues. Analysis of stator current data with power quality consideration allows for the detection of faults at an early stage with more accuracy when compared to other MCSA methods. In the proposed method, the operations involved in each stage were of low complexity, which implies fewer resources required for hardware implementation and real-time applications. These considerations are especially useful for industrial applications. The proposed method’s classification accuracy considers a power quality issue of 96.9%, whereas in the normal case, it is 93.3%.
Author Contributions
Conceptualization, S.G. and P.W.D.; data curation, S.G. and P.K.B.; formal analysis, S.G. and P.K.B.; project administration, P.W.D.; investigation, S.G., P.W.D., D.S. and P.K.B.; methodology, S.G. and P.W.D.; resources, D.S. and S.G.; software, S.G.; supervision, P.W.D.; writing—original draft, S.G. and P.W.D.; writing—review and editing, D.S. and P.K.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liang, X.; Ilochonwu, O. Induction Motor Starting in Practical Industrial Applications. Industry Applications. IEEE Trans. Ind. Appl. 2018, 47, 271–280. [Google Scholar] [CrossRef]
- Romero-Troncoso, R.J.; Saucedo-Gallaga, R.; Cabal-Yepez, E.; Garcia-Perez, A.; Osornio-Rios, R.A.; Alvarez-Salas, R.; Miranda-Vidales, H.; Huber, N. FPGA-based online detection of multiple combined faults in induction motors through information entropy and fuzzy inference. IEEE Trans. Ind. Electron. 2011, 58, 5263–5270. [Google Scholar] [CrossRef]
- Bonnett, A.H.; Soukup, G.C. Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors. IEEE Trans. Ind. Appl. 1992, 28, 921–937. [Google Scholar] [CrossRef]
- Bonnett, A.H.; Soukup, G.C. Analysis of rotor failures in squirrel-cage induction motors. IEEE Trans. Ind. Appl. 1998, 24, 1124–1130. [Google Scholar] [CrossRef]
- Siyambalapitiya, D.J.T.; McLaren, P.G.; Acarnley, P.P. A rotor condition monitor for squirrel-cage induction machines. IEEE Trans. Ind. Appl. 1987, IA-23, 334–340. [Google Scholar] [CrossRef]
- Mehrjou, M.R.; Mariun, N.; Marhaban, M.H.; Misron, N. Rotor fault condition monitoring techniques for squirrel-cage inductionmachine—A. review. Mech. Syst. Signal Process. 2011, 25, 2827–2848. [Google Scholar] [CrossRef]
- Curcuru’, G.; Cocconcelli, M.; Immovilli, F.; Rubini, R. On thedetection of distributed roughness on ball bearings via stator currentenergy: Experimental results. Diagnostyka 2009, 51, 17–21. [Google Scholar]
- Ibrahim, A.; El Badaoui, M.; Guillet, F.; Youssef, W. Electrical signalsanalysis of an asynchronous motor for bearing fault detection. In Proceedings of the IECON 2006-32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 4975–4980. [Google Scholar]
- Sun, L.; Xu, B. An improvement of stator current based detectionof bearing fault in induction motors. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 2277–2281. [Google Scholar]
- Blodt, M.; Chabert, M.; Regnier, J.; Faucher, J. Mechanical load faultdetection in induction motors by stator current time–frequency analysis. IEEE Trans. Ind. Appl. 2006, 42, 1454–1463. [Google Scholar] [CrossRef]
- Seera, M.; Lim, C.P.; Nahavandi, S.; Loo, C.K. Condition monitoringof induction motors: A review and an application of an ensembleof hybrid intelligent models. Expert Syst. Appl. 2014, 41, 4891–4903. [Google Scholar] [CrossRef]
- Drif, M.; Cardoso, A.J.M. Stator fault diagnostics in squirrel cagethree-phase induction motor drives using the instantaneous active andreactive power signature analyses. IEEE Trans. Ind. Inf. 2014, 10, 1348–1360. [Google Scholar] [CrossRef]
- Sohani, A.; Shahverdian, M.H.; Sayyaadi, H.; Garcia, D.A. Impact of absolute and relative humidity on the performance of mono and poly crystalline silicon photovoltaics; applying artificial neural network. J. Clean. Prod. 2020, 276, 123016. [Google Scholar] [CrossRef]
- Majidi, N.M.; Heydari, A.; Groppi, D.; Cumo, F.; Garcia, D.A. Wind source potential assessment using Sentinel 1 satellite and a new forecasting model based on machine learning: A case study Sardinia islands. Renew. Energy 2020, 155, 212–224. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.; Riera-Guasp, M.; Roger-Folch, J.; Martınez, G.F.; Peris, A. Application and optimization of the discrete wavelet transform for the detection of broken rotor bars in induction machines. Appl. Comput. Harmon. Anal. 2006, 21, 268–279. [Google Scholar] [CrossRef]
- Cho, H.C.; Knowles, J.; Fadali, M.S.; Lee, K.S. Fault Detection and Isolation of Induction Motors Using Recurrent Neural Networks and Dynamic Bayesian Modeling. IEEE Trans. Control Syst. Technol. 2010, 18, 430–437. [Google Scholar] [CrossRef]
- Su, H.; Chong, K.T. Induction machine condition monitoring using neural network modelling. IEEE Trans. Ind. Electron. 2007, 54, 241–249. [Google Scholar] [CrossRef]
- El Bouchikhi, E.H.; Choqueuse, V.; Benbouzid, M. Induction machine faults detection using stator current parametric spectral estimation. Mech. Syst. Signal Process. 2015, 52–53, 447–464. [Google Scholar] [CrossRef]
- He, Q. Vibration signal classification by wavelet packet energy flow manifold learning. J. Sound Vib. 2013, 332, 1881–1894. [Google Scholar] [CrossRef]
- Duraisamy, V.; Devarajan, N.; Somesundareswari, D.; Sivanandam, S.N. Modified back propagation algorithm for incipient fault detection in three phase induction motor. Model. Meas. Control 2006, 79, 15–25. [Google Scholar]
- Wang, Z.-X.; Chang, C.S.; German, X.; Tan, W.W. Online fault detection of induction motors using independent component analysis and fuzzy neural network. In Proceedings of the 8th International Conference on Advances in Power System Control, Operation and Management (APSCOM 2009), London, UK, 8–11 November 2009; p. 321. [Google Scholar]
- Chua, T.W.; Tan, W.W.; Wang, Z.-X.; Chang, C.S. Hybrid time-frequency domain analysis for inverter-fed induction motor fault detection. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), Bari, Italy, 4 July 2010; pp. 1633–1638. [Google Scholar]
- Garcia-Ramirez, A.G.; Osornio-Rios, R.A.; Garcia-Perez, A.; Romero-Troncoso, R.D.J. FPGA-based smart-sensor for fault detection in VSD-fed induction motors. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 233–240. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).