Optimal Voltage Control in MV Network with Distributed Generation



Abstract
:1. Introduction
- search for an indicator of the quality of control (Section 2)
- defining the objective function and task constraints (Section 3.1)
- description of the optimization algorithm and justification for the choice of the heuristic method (Section 3.2)
- MV test network and research methodology (Section 4)
- results for three optional objective functions, finding the best one, verification of results for an alternative optimization algorithm (Section 5).
2. Review of Indicators for Assessing the Quality of Voltage Control in MV Networks
- minimum cost of economic losses for consumerswhere KG is the cost of losses incurred by costumers due to voltage deviation from the nominal value;
- the minimum cost of power and energy losses in the network to the network operatorwhere KΔP is the cost of power losses and KΔA is the cost of energy losses in the grid;
- minimum relative energy losses in the gridwhere ΔA is the energy losses in the network during optimization period T, A is the energy fed into the network during period T;
- the maximum profit achieved by the network operator from the sale of electricitywhere DS are the revenues generated from the sale of electricity and KZ are costs of purchasing power and energy;
- minimum total costs (both on the part of the operator and the costumers)where KS are the costs of power and energy losses in the grid, KG are costs of the economic losses incurred by costumers,
- minimum costs of the distribution network operatorwhere KU is the cost of the discounts granted to consumers in connection with exceeding the permissible voltage deviations.
3. Advanced Voltage Control in MV Network as an Optimization Task
3.1. The Formulation of the Objective Function and Task Constraints
- single-criterion objective function—voltage quality indicator:where is the expected voltage value in individual network nodes (the analyses assumed that ),
- single-criterion objective function—grid active power losses ():
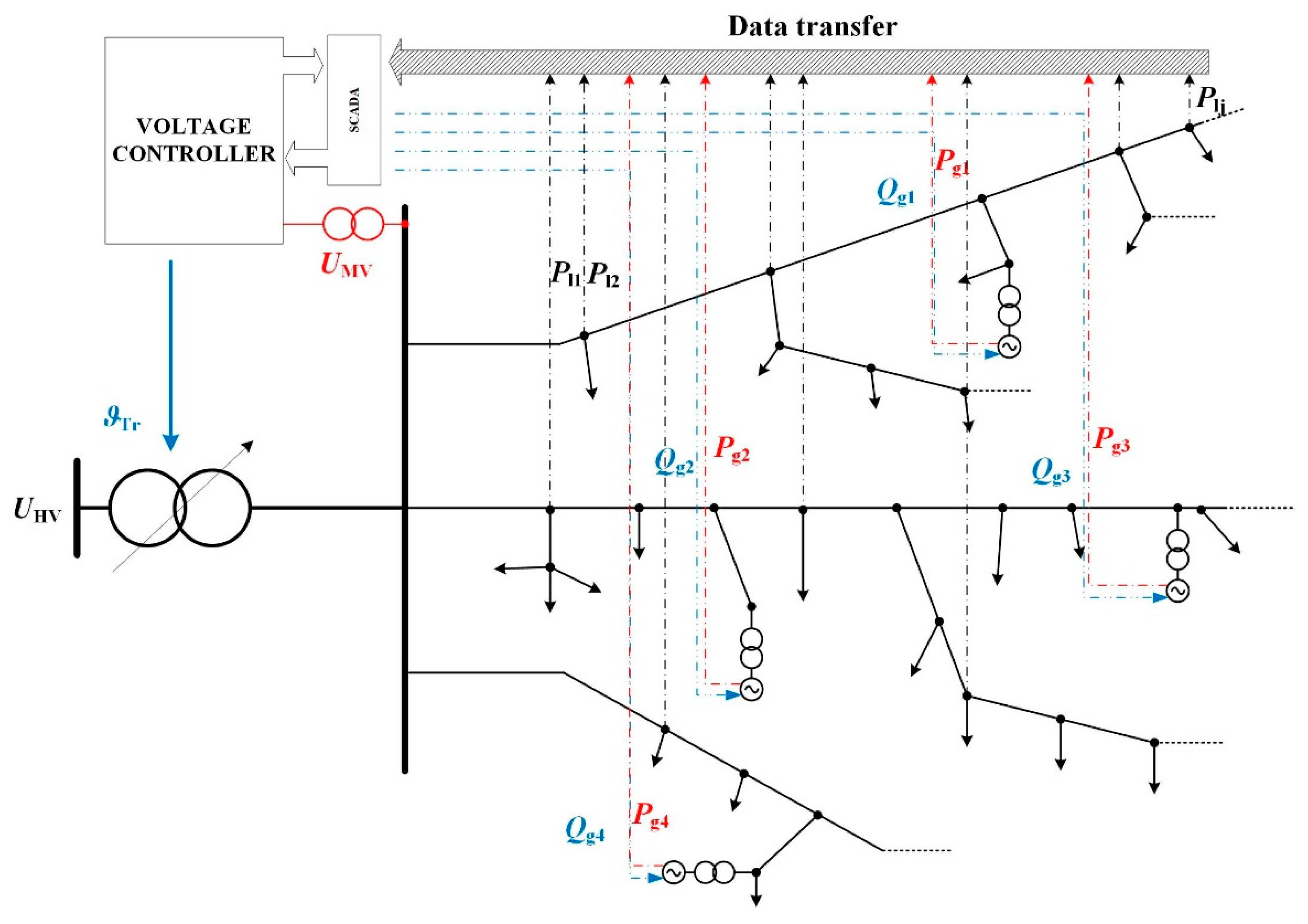
- two-criteria objective function—sum of the function and modified function with weighting factors :whereby:—vector of control variables formed by the transformer ratio (–discrete variable) and reactive power of p sources connected to the MV network;—vector of independent variables, formed by: HV network supply voltage, active and reactive power received in m nodes, and power generated in p sources, not subject to change during optimization calculations;—the vector of state variables containing nodal voltages and their arguments (total number of network nodes j = p + m).
- objective function—the vector of control variables x providing the minimum function described (optionally) as (12), (13) or (14) is sought:
- vector of inequality constraints h, ensuring that the elements of the vector of state variables and elements of the vector of control variables are kept within the range specified by the technical requirements:
- minimum and maximum values for transformer ratio ()
- minimum and maximum reactive power values of each renewable source ()
- minimum and maximum voltage values for all network nodes ()
- current-capacity limit values for power lines ()
- the permissible load of the HV/MV transformer ()
3.2. Description of the Heuristic Optimization Algorithm
- drawing of initial values of the components of the decision vector x0,
- finding the objective function F value for the start vector x0,
- setting the iteration counter to t = 1,
- determining the scope of and ,
- correction of the decision vector x components by means of multiplicative correction factors g(α), g(β),
- determination of a new state of the analyzed system (in the case of the OPF task, solution of the system of Equation (15)),
- determining the value of objective function F for subsequent solutions, checking if the objective function for the next solution is better than the solution from the previous iteration (if so, replace this solution with the current—better—solution, and if not—leave it), identification of the q solution for which the function reaches the minimum value,
- checking whether for the identified solution q, the relation occurs; if so, then accepting it as the next decision vector in the iterative process, i.e.,
- verification of the stopping criterion (t + 1 = tmax), end or subsequent iteration (t = t + 1), and return to point d,
- end of calculation.
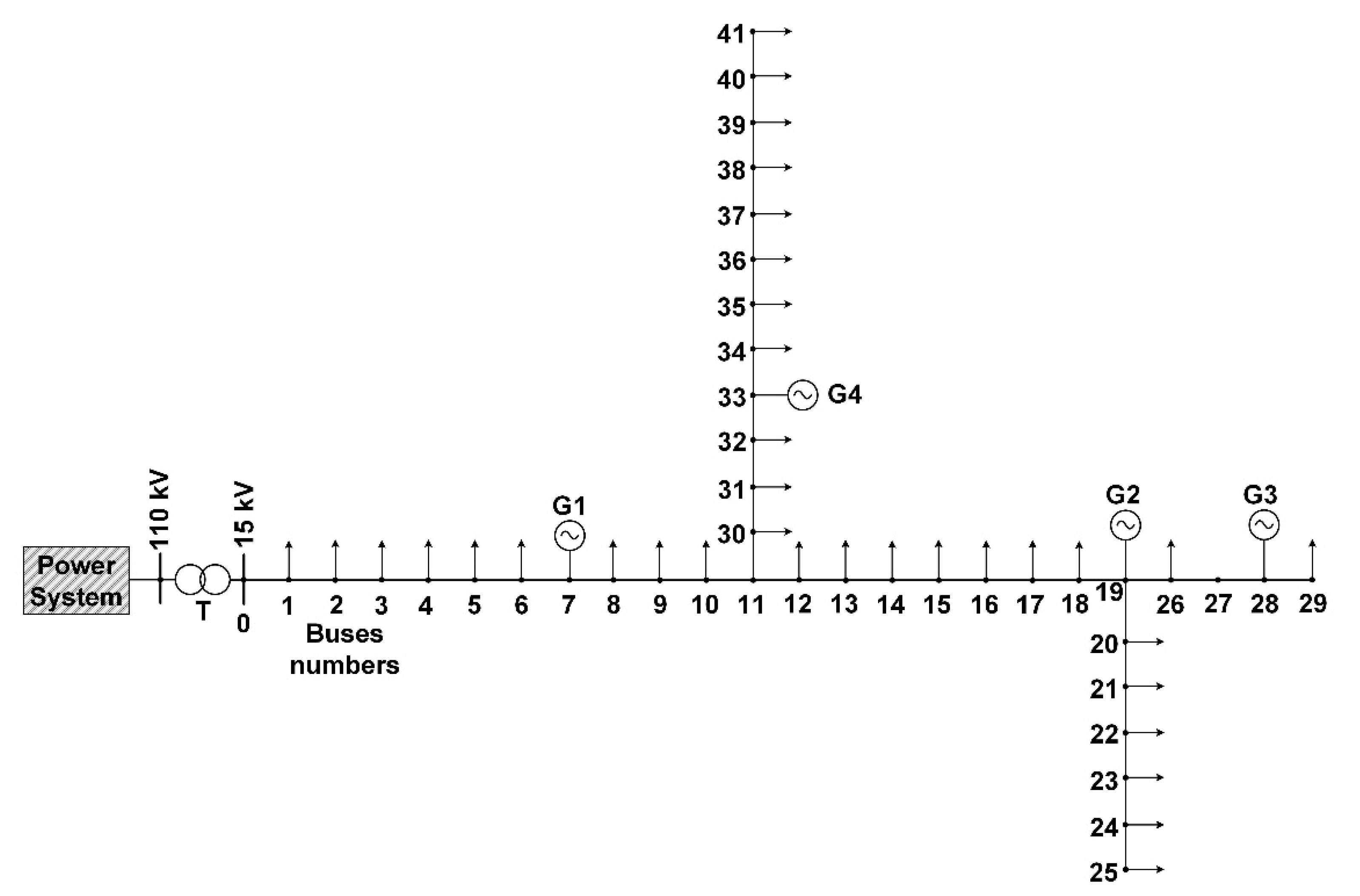
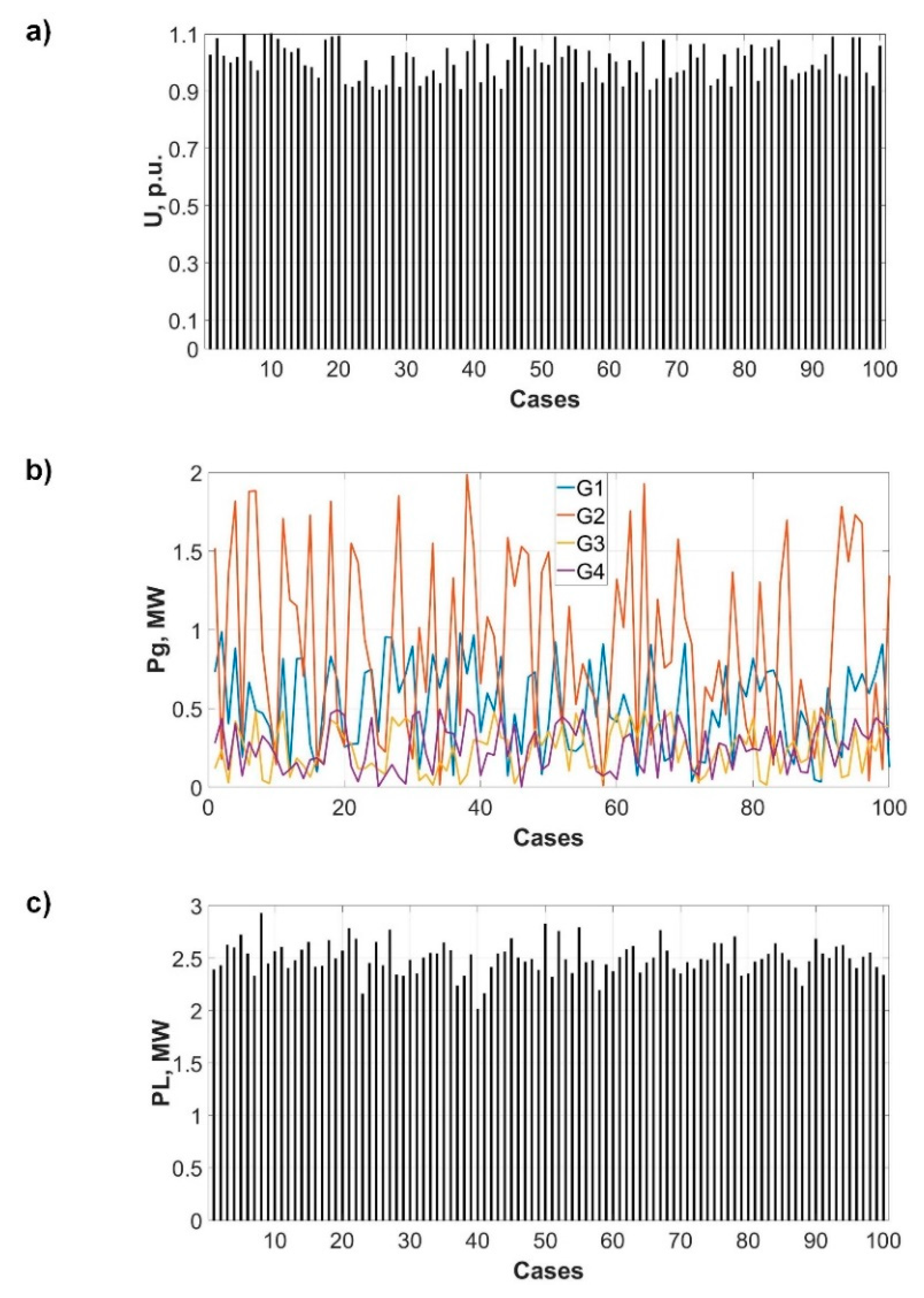
4. Description of the Test Network and Methodology of the Tests Carried Out
- load at the node i
- generation in node k including
5. Results of Single-Criteria Optimization
5.1. The Way of Presenting the Research Results
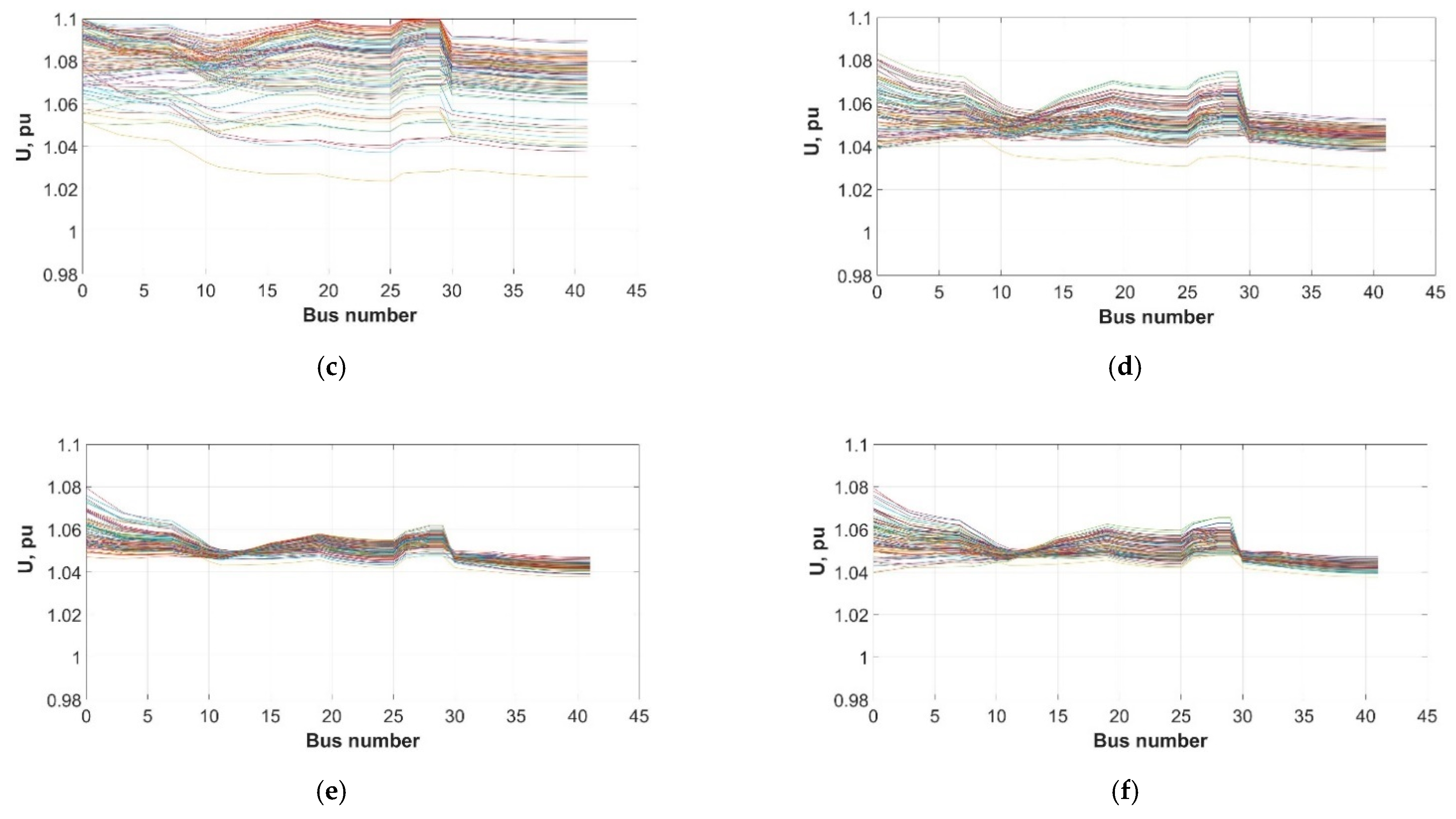
- the effects of traditional control, i.e., maintaining a constant voltage value of 1.05 UnMV, on the MV busbars, using OLTC;
- control effects, the aim of which is to minimize the single-criterion objective function (12), i.e., to minimize the square of the relative voltage deviations from the value of 1.05 UnMV determined for all network nodes, using OLTC and appropriately selected reactive power values of distributed sources, as for all the next cases;
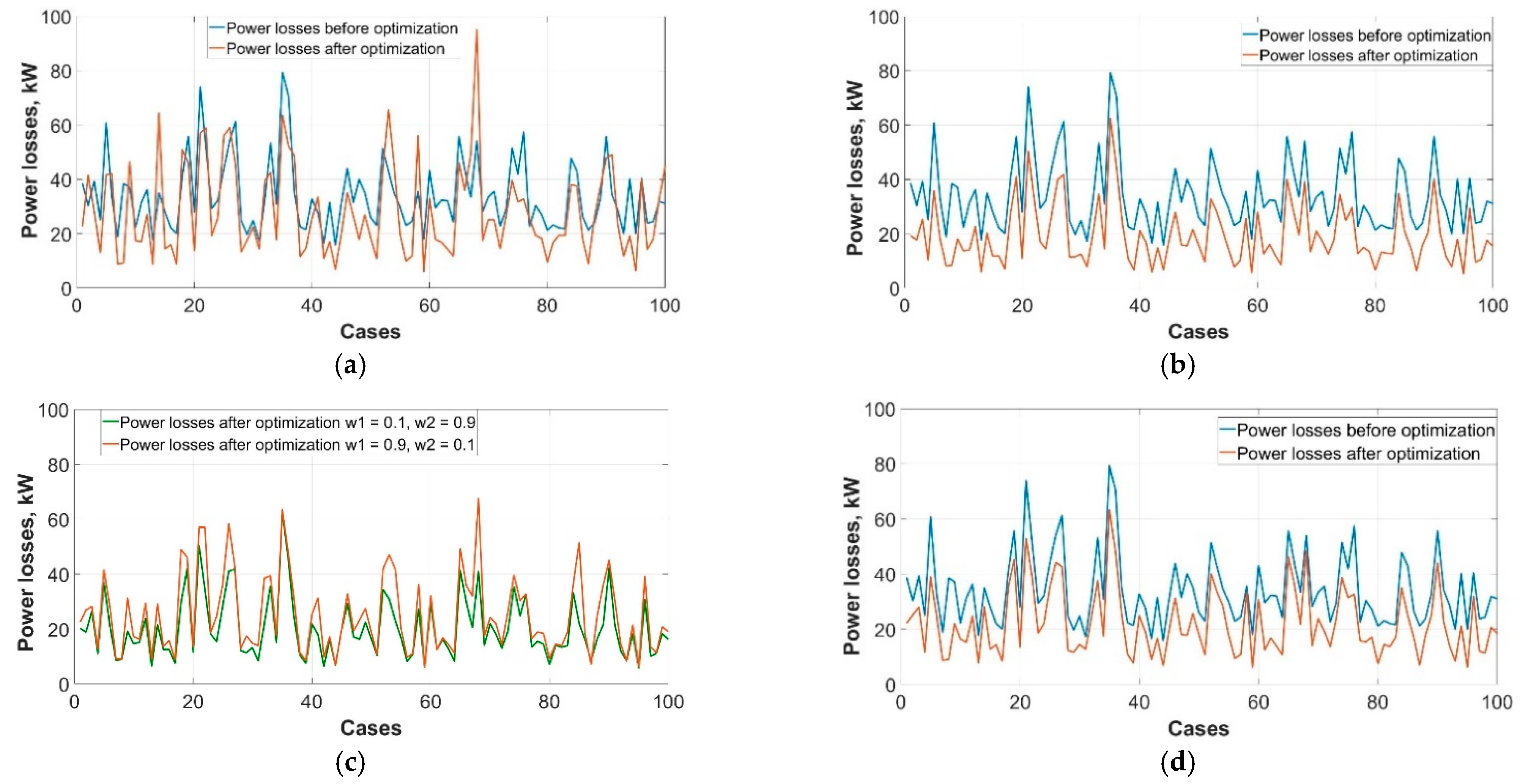
- effects of regulation, the aim of which is to minimize the single-criteria objective function (13), i.e., to minimize power losses in the MV grid;
- the effects of minimizing the two-criteria objective function (15), where the voltage deviation component has the weighting factor w1 = 0.1, and the relative power loss indicator w2 = 0.9;
- the effects of minimizing the two-criteria objective function (15), where the voltage deviation component has the weighting factor w1 = 0.9, and the relative power loss indicator w2 = 0.1;
- the effects of minimizing the two-criteria objective function (15), where the voltage deviation component has the weighting factor w1 = 0.7, and the relative power loss indicator w2 = 0.3.
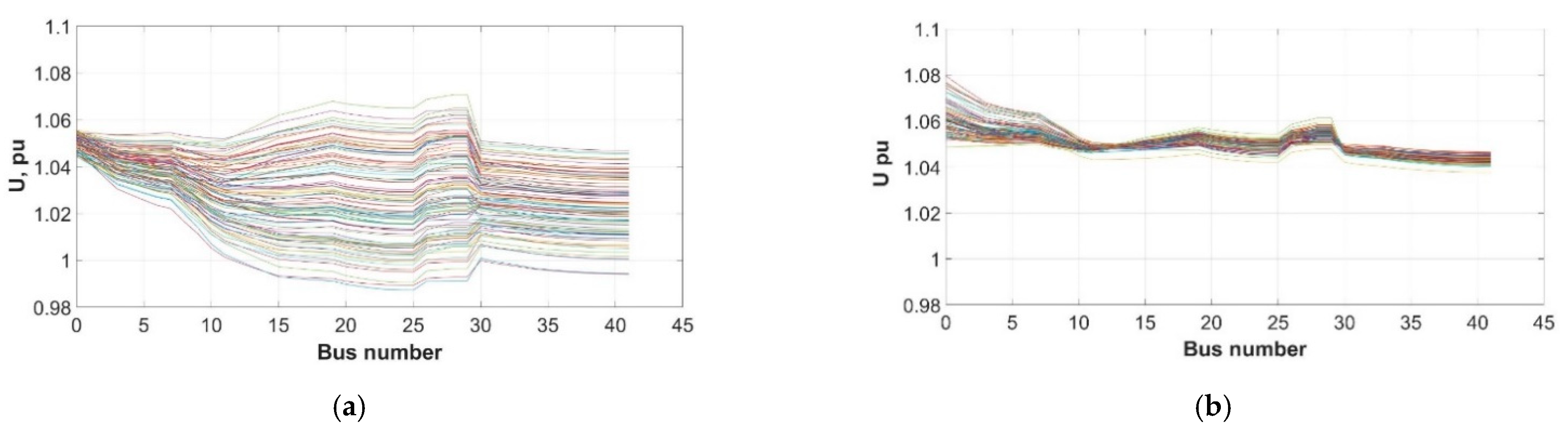
5.2. Qualitative Assessment of Voltage Control
5.3. Quantitative Assessment of Voltage Control
5.4. Power Losses, Selection of Weighting Factors
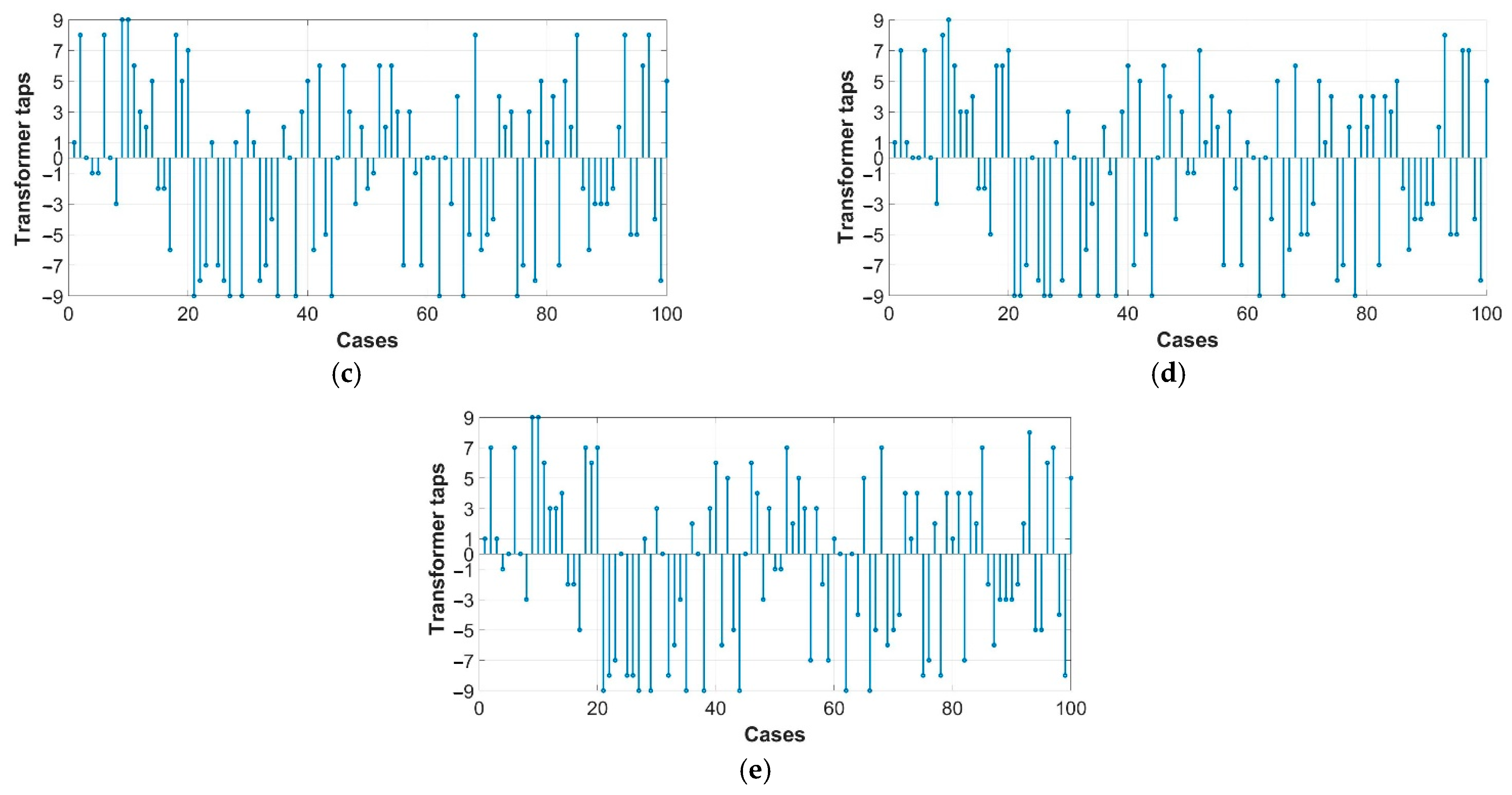
5.5. The Values of Decision Variables
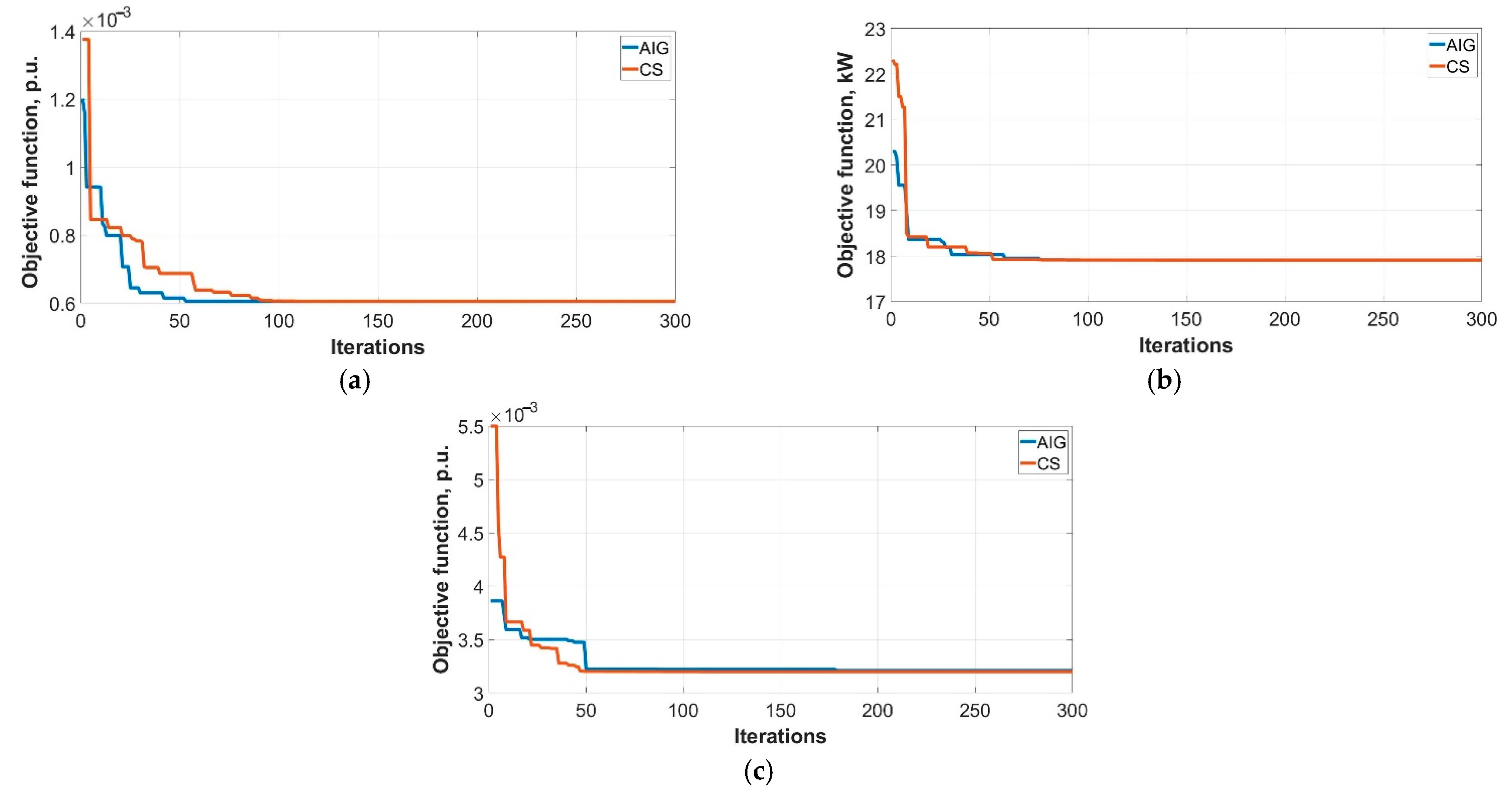
5.6. The Effectiveness of the AIG Optimization Algorithm and Verification of the Calculation Results
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Farkas, C.; Tóth, A.; Orlay, I. Voltage Control Methods in the MV Grid with a Large Share of PV. Int. J. Emerg. Electr. Power Syst. 2019, 20. [Google Scholar] [CrossRef]
- Sigalo, M.B.; Eze, K.; Usman, R. Analysis of medium and low voltage distribution network with high level penetration of distributed generators using eracs. Eur. J. Eng. Technol. 2016, 4, 9–23. [Google Scholar]
- Zhang, D.; Li, J.; Hui, D. Coordinated control for voltage regulation of distribution network voltage regulation by distributed energy storage systems. Prot. Control Mod. Power Syst. 2018, 3. [Google Scholar] [CrossRef]
- Pijarski, P.; Kacejko, P.; Adamek, S. Analysis of Voltage Conditions in Low Voltage Networks Highly Saturated with Photovoltaic Micro Installations. Acta Energ. 2018, 2018, 4–9. [Google Scholar] [CrossRef]
- Kazmi, S.; Shahzad, M.; Shin, D. Multi-Objective Planning Techniques in Distribution Networks: A Composite Review. Energies 2017, 10, 208. [Google Scholar] [CrossRef] [Green Version]
- Mahmud, N.; Zahedi, A. Review of control strategies for voltage regulation of the smart distribution network with high penetration of renewable distributed generation. Renew. Sust. Energy Rev. 2016, 64, 582–595. [Google Scholar] [CrossRef]
- Iman, Z. Planning of Distribution Networks for Medium Voltage and Low Voltage. Ph.D. Thesis, Queensland University of Technology, Queensland, Australia, 2011. [Google Scholar]
- Kacejko, P.; Pijarski, P. Zarządzanie mikroinstalacjami OZE—realne wyzwanie techniczne, czy tylko impuls marketingowy? [Mangement of microgenerations of renewable energy sources—technical chalange or the marketing impuls?]. Rynek Energii 2016, 2016, 41–45. [Google Scholar]
- EN 50160: Voltage Characteristics of Electricity Supplied by Public Distribution Network; PKN: Warsaw, Poland, 2019.
- IEC. IEC 60038: IEC Standard Voltages; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2009. [Google Scholar]
- Kot, A. Optimal Voltage Control in Medium Voltage Distribution Networks with Dispersed Generation. Ph.D. Thesis, AGH University of Science and Technology, Cracow, Poland, 2005. [Google Scholar]
- Szpyra, W.; Kot, A. Optimal voltage control in medium voltage power distribution networks. Acta Energ. 2009, 2, 89–105. [Google Scholar]
- Agalgaonkar, Y.; Pal, B.C.; Jabr, R.A. Distribution voltage control considering the impact of PV generation on tap changers and autonomous regulators. In Proceedings of the 2014 IEEE PES General Meeting | Conference & Exposition. 2014 IEEE Power & Energy Society General Meeting, National Harbor, MD, USA, 27–31 July 2014; p. 1, ISBN 978-1-4799-6415-4. [Google Scholar]
- Neagu, B.C.; Grigoras, G. Optimal Voltage Control in Power Distribution Networks Using an Adaptive On-Load Tap Changer Transformers Techniques. In Proceedings of the 2019 International Conference on Electromechanical and Energy Systems (SIELMEN). 2019 International Conference on Electromechanical and Energy Systems (SIELMEN), Craiova, Romania, 9–11 October 2019; pp. 1–6, ISBN 978-1-7281-4011-7. [Google Scholar]
- Adamek, S. Optimal Voltage Control in Distributed Power Grid with Dispersed Generation. Ph.D. Thesis, Lublin University of Technology, Lublin, Poland, 2010. [Google Scholar]
- Kacejko, P.; Adamek, S.; Wydra, M. Optimal voltage control in distribution networks with dispersed generation. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe). 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010; pp. 1–4, ISBN 978-1-4244-8508-6. [Google Scholar]
- Dib, M.; Ramzi, M.; Nejmi, A. Voltage regulation in the medium voltage distribution grid in the presence of renewable energy sources. Mater. Today Proc. 2019, 13, 739–745. [Google Scholar] [CrossRef]
- Guo, Y.; Wu, Q.; Gao, H.; Shen, F. Distributed voltage regulation of smart distribution networks: Consensus-based information synchronization and distributed model predictive control scheme. Int. J. Electr. Power Energy Syst. 2019, 111, 58–65. [Google Scholar] [CrossRef]
- Agalgaonkar, Y.P.; Pal, B.C.; Jabr, R.A. Distribution Voltage Control Considering the Impact of PV Generation on Tap Changers and Autonomous Regulators. IEEE Trans. Power Syst. 2014, 29, 182–192. [Google Scholar] [CrossRef] [Green Version]
- Castro, J.R.; Saad, M.; Lefebvre, S.; Asber, D.; Lenoir, L. Optimal voltage control in distribution network in the presence of DGs. Int. J. Electr. Power Energy Syst. 2016, 78, 239–247. [Google Scholar] [CrossRef]
- Lu, J.; Wang, B.; Ren, H.; Zhao, D.; Wang, F.; Shafie-khah, M.; Catalão, J. Two-Tier Reactive Power and Voltage Control Strategy Based on ARMA Renewable Power Forecasting Models. Energies 2017, 10, 1518. [Google Scholar] [CrossRef] [Green Version]
- Bedawy, A.; Yorino, N.; Mahmoud, K.; Zoka, Y.; Sasaki, Y. Optimal Voltage Control Strategy for Voltage Regulators in Active Unbalanced Distribution Systems Using Multi-Agents. IEEE Trans. Power Syst. 2020, 35, 1023–1035. [Google Scholar] [CrossRef]
- Kryonidis, G.C.; Demoulias, C.S.; Papagiannis, G.K. A new voltage control scheme for active medium-voltage (MV) networks. Electr. Power Syst. Res. 2019, 169, 53–64. [Google Scholar] [CrossRef]
- Wlodarczyk, P.; Sumper, A.; Cruz, M. Voltage Control of Distribution Grids with Multi-Microgrids Using Reactive Power Management. AECE 2015, 15, 83–88. [Google Scholar] [CrossRef]
- Tengku Hashim, T.J.; Mohamed, A. Optimal coordinated voltage control in active distribution networks using backtracking search algorithm. PLoS ONE 2017, 12, e0177507. [Google Scholar] [CrossRef] [Green Version]
- Salam, M.A. Fundamentals of Electrical Power Systems Analysis; Springer: Singapore, MI, USA, 2020; ISBN 978-981-15-3211-5. [Google Scholar]
- Murty, P.S.R. Power Systems Analysis; Elsevier Science: Saint Louis, MO, USA, 2017; ISBN 9780081011119. [Google Scholar]
- Frank, S.; Steponavice, I.; Rebennack, S. Optimal power flow: A bibliographic survey I. Energy Syst 2012, 3, 221–258. [Google Scholar] [CrossRef]
- Dommel, H.; Tinney, W. Optimal Power Flow Solutions. IEEE Trans. Power Appar. Syst. 1968, PAS-87, 1866–1876. [Google Scholar] [CrossRef]
- Lin, J.; Magnago, F.H. Optimal Power Flow. In Electricity Markets: Theories and Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2017; pp. 141–171. ISBN 9781119179382. [Google Scholar]
- Petinrin, J.O.; Shaabanb, M. Impact of renewable generation on voltage control in distribution systems. Renew. Sustain. Energy Rev. 2016, 65, 770–783. [Google Scholar] [CrossRef]
- Sharma, V.; Aziz, S.M.; Haque, M.H.; Kauschke, T. Effects of high solar photovoltaic penetration on distribution feeders and the economic impact. Renew. Sustain. Energy Rev. 2020, 131, 110021. [Google Scholar] [CrossRef]
- Sarimuthu, C.R.; Ramachandaramurthy, V.K.; Agileswari, K.R.; Mokhlis, H. A review on voltage control methods using on-load tap changer transformers for networks with renewable energy sources. Renew. Sustain. Energy Rev. 2016, 62, 1154–1161. [Google Scholar] [CrossRef]
- Oh, C.-H.; Go, S.-I.; Choi, J.-H.; Ahn, S.-J.; Yun, S.-Y. Voltage Estimation Method for Power Distribution Networks Using High-Precision Measurements. Energies 2020, 13, 2385. [Google Scholar] [CrossRef]
- Mohagheghi, E.; Alramlawi, M.; Gabash, A.; Li, P. A Survey of Real-Time Optimal Power Flow. Energies 2018, 11, 3142. [Google Scholar] [CrossRef] [Green Version]
- Dzafic, I.; Ablakovic, D.; Henselmeyer, S. Real-time three-phase state estimation for radial distribution networks. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting. 2012 IEEE Power & Energy Society General Meeting. New Energy Horizons–Opportunities and Challenges, San Diego, CA, USA, 22–26 July 2012; pp. 1–9, ISBN 978-1-4673-2729-9. [Google Scholar]
- Zhu, J. Optimization of Power System Operation; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; ISBN 9781118887004. [Google Scholar]
- Ebeed, M.; Kamel, S.; Jurado, F. Optimal Power Flow Using Recent Optimization Techniques. Classical and Recent Aspects of Power System Optimization; Elsevier: New York, NY, USA, 2018; pp. 157–183. ISBN 9780128124413. [Google Scholar]
- Glavitsch, H.; Bacher, R. Optimal Power Flow Algorithms. Analysis and Control System Techniques for Electric Power Systems, Part 1 of 4; Elsevier: New York, NY, USA, 1991; pp. 135–205. ISBN 9780120127412. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Pijarski, P.D. Optymalizacja Heurystyczna w Ocenie Warunków Pracy i Planowaniu Rozwoju Systemu Elektroenergetycznego [Heuristic Optimization in the Assessment of Operating Conditions and Development Planning of the Power System]; Wydawnictwo Politechniki Lubelskiej; Lublin University of Technology Publishers: Lublin, Poland, 2019; ISBN 978-83-7947-349-6. [Google Scholar]
- Elmitwally, A.; Elsaid, M.; Elgamal, M.; Chen, Z. A Fuzzy-Multiagent Self-Healing Scheme for a Distribution System with Distributed Generations. IEEE Trans. Power Syst. 2015, 30, 2612–2622. [Google Scholar] [CrossRef]
- Niknam, T.; Firouzi, B.B.; Ostadi, A. A new fuzzy adaptive particle swarm optimization for daily Volt/Var control in distribution networks considering distributed generators. Appl. Energy 2010, 87, 1919–1928. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, Y. Multi-objective reactive power and voltage control based on fuzzy optimization strategy and fuzzy adaptive particle swarm. Int. J. Electr. Power Energy Syst. 2008, 30, 525–532. [Google Scholar] [CrossRef]
- Pijarski, P.; Kacejko, P. A new metaheuristic optimization method: The algorithm of the innovative gunner (AIG). Eng. Optim. 2019, 51, 2049–2068. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks. ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948, ISBN 0-7803-2768-3. [Google Scholar]
- Pham, D.T.; Ghanbarzadeh, A.; Koç, E.; Otri, S.; Rahim, S.; Zaidi, M. The Bees Algorithm—A Novel Tool for Complex Optimisation Problems. In Intelligent Production Machines and Systems; Elsevier: New York, NY, USA, 2006; pp. 454–459. ISBN 9780080451572. [Google Scholar]
- Yang, X.-S.; Deb, S. Cuckoo Search via Lévy flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC). 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214, ISBN 978-1-4244-5053-4. [Google Scholar]
- Radosavljević, J. Metaheuristic Optimization in Power Engineering; The Institution of Engineering and Technology: London, UK, 2018; ISBN 9781785615467. [Google Scholar]
- Du, K.-L.; Swamy, M.N.S. Search and Optimization by Metaheuristics; Springer International Publishing: Cham, Switzerland, 2016; ISBN 978-3-319-41191-0. [Google Scholar]
- Pesaran Hajiabbas, M.; Mohammadi-Ivatloo, B. Optimization of Power System Problems; Springer International Publishing: Cham, Switzerland, 2020; ISBN 978-3-030-34049-0. [Google Scholar]
- Kumar, K.; Zindani, D.; Davim, J.P. Optimizing Engineering Problems Through Heuristic Techniques; CRC Press: Boca Raton, FL, USA, 2020; ISBN 9781138485365. [Google Scholar]
- Bozorg-Haddad, O.; Solgi, M.; Loaiciga, H.A. Meta-Heuristic and Evolutionary Algorithms for Engineering Optimization; Wiley Blackwell: Chichester, UK, 2017; ISBN 978-1-119-38699-5. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weight w1 | Weight w2 | Voltage Indicator F1max | Voltage Indicator F1av | Power Losses ΔPloss_max [kW] | Power Losses ΔPloss_av [kW] |
|---|---|---|---|---|---|
| 0.1 | 0.9 | 0.0094 | 0.0024 | 62.5 | 20.2 |
| 0.3 | 0.7 | 0.0051 | 0.0018 | 62.7 | 20.6 |
| 0.5 | 0.5 | 0.0040 | 0.0015 | 63.0 | 21.2 |
| 0.7 | 0.3 | 0.0038 | 0.0013 | 63.5 | 22.3 |
| 0.9 | 0.1 | 0.0037 | 0.0011 | 67.7 | 25.2 |
| Bus No. | The Load Power, PL, kW | Voltage before Optimization, U p.u. | Voltage after Optimization, U p.u. | |||||
|---|---|---|---|---|---|---|---|---|
| Objective Function F1 | Objective Function F2 | Objective Function F3 w1 = 0.7, w2 = 0.3 | ||||||
| AIG | CS | AIG | CS | AIG | CS | |||
| 0 | 0 | 1.0497 | 1.0533 | 1.0533 | 1.0811 | 1.0811 | 1.0453 | 1.0453 |
| 1 | 45.29 | 1.0480 | 1.0524 | 1.0524 | 1.0813 | 1.0813 | 1.0451 | 1.0452 |
| 2 | 15.57 | 1.0465 | 1.0517 | 1.0517 | 1.0816 | 1.0816 | 1.0451 | 1.0451 |
| 3 | 320.65 | 1.0450 | 1.0509 | 1.0509 | 1.0820 | 1.0820 | 1.0450 | 1.0451 |
| 4 | 39.46 | 1.0447 | 1.0511 | 1.0510 | 1.0826 | 1.0826 | 1.0455 | 1.0456 |
| 5 | 87.43 | 1.0445 | 1.0512 | 1.0512 | 1.0833 | 1.0833 | 1.0460 | 1.0461 |
| 6 | 26.01 | 1.0444 | 1.0515 | 1.0515 | 1.0841 | 1.0841 | 1.0467 | 1.0468 |
| 7 | 0.00 | 1.0444 | 1.0517 | 1.0517 | 1.0846 | 1.0846 | 1.0471 | 1.0472 |
| 8 | 232.60 | 1.0424 | 1.0499 | 1.0499 | 1.0840 | 1.0841 | 1.0461 | 1.0462 |
| 9 | 46.23 | 1.0413 | 1.0489 | 1.0489 | 1.0844 | 1.0844 | 1.0460 | 1.0461 |
| 10 | 80.95 | 1.0401 | 1.0479 | 1.0478 | 1.0848 | 1.0849 | 1.0460 | 1.0461 |
| 11 | 0.00 | 1.0395 | 1.0474 | 1.0474 | 1.0854 | 1.0854 | 1.0462 | 1.0463 |
| 12 | 24.86 | 1.0408 | 1.0484 | 1.0484 | 1.0876 | 1.0876 | 1.0480 | 1.0482 |
| 13 | 46.22 | 1.0422 | 1.0495 | 1.0495 | 1.0898 | 1.0899 | 1.0499 | 1.0501 |
| 14 | 48.24 | 1.0437 | 1.0507 | 1.0507 | 1.0922 | 1.0922 | 1.0520 | 1.0522 |
| 15 | 170.92 | 1.0453 | 1.0520 | 1.0520 | 1.0947 | 1.0947 | 1.0541 | 1.0543 |
| 16 | 35.83 | 1.0462 | 1.0528 | 1.0527 | 1.0959 | 1.0959 | 1.0552 | 1.0554 |
| 17 | 47.79 | 1.0471 | 1.0536 | 1.0535 | 1.0972 | 1.0972 | 1.0563 | 1.0566 |
| 18 | 58.01 | 1.0481 | 1.0544 | 1.0544 | 1.0985 | 1.0986 | 1.0576 | 1.0578 |
| 19 | 0.00 | 1.0491 | 1.0553 | 1.0553 | 1.0999 | 1.1000 | 1.0588 | 1.0590 |
| 20 | 202.48 | 1.0476 | 1.0538 | 1.0537 | 1.0985 | 1.0985 | 1.0573 | 1.0575 |
| 21 | 41.21 | 1.0467 | 1.0529 | 1.0529 | 1.0976 | 1.0977 | 1.0564 | 1.0567 |
| 22 | 37.82 | 1.0460 | 1.0522 | 1.0522 | 1.0970 | 1.0970 | 1.0557 | 1.0560 |
| 23 | 120.94 | 1.0454 | 1.0516 | 1.0516 | 1.0964 | 1.0964 | 1.0552 | 1.0554 |
| 24 | 31.04 | 1.0452 | 1.0515 | 1.0514 | 1.0962 | 1.0963 | 1.0550 | 1.0552 |
| 25 | 23.10 | 1.0452 | 1.0514 | 1.0514 | 1.0962 | 1.0962 | 1.0549 | 1.0552 |
| 26 | 24.76 | 1.0490 | 1.0546 | 1.0545 | 1.0998 | 1.0999 | 1.0583 | 1.0585 |
| 27 | 0.00 | 1.0490 | 1.0540 | 1.0539 | 1.0999 | 1.1000 | 1.0580 | 1.0581 |
| 28 | 0.00 | 1.0491 | 1.0538 | 1.0537 | 1.0999 | 1.1000 | 1.0578 | 1.0580 |
| 29 | 50.05 | 1.0491 | 1.0538 | 1.0537 | 1.0999 | 1.1000 | 1.0578 | 1.0580 |
| 30 | 181.07 | 1.0384 | 1.0465 | 1.0465 | 1.0846 | 1.0846 | 1.0453 | 1.0455 |
| 31 | 222.54 | 1.0377 | 1.0460 | 1.0460 | 1.0840 | 1.0841 | 1.0448 | 1.0449 |
| 32 | 20.94 | 1.0374 | 1.0459 | 1.0459 | 1.0839 | 1.0840 | 1.0446 | 1.0448 |
| 33 | 0.00 | 1.0371 | 1.0458 | 1.0458 | 1.0839 | 1.0839 | 1.0446 | 1.0447 |
| 34 | 214.51 | 1.0362 | 1.0450 | 1.0449 | 1.0830 | 1.0831 | 1.0437 | 1.0439 |
| 35 | 52.57 | 1.0357 | 1.0444 | 1.0444 | 1.0825 | 1.0826 | 1.0432 | 1.0434 |
| 36 | 57.17 | 1.0352 | 1.0440 | 1.0439 | 1.0821 | 1.0821 | 1.0427 | 1.0429 |
| 37 | 41.80 | 1.0348 | 1.0436 | 1.0436 | 1.0817 | 1.0817 | 1.0423 | 1.0425 |
| 38 | 66.96 | 1.0345 | 1.0433 | 1.0432 | 1.0814 | 1.0814 | 1.0420 | 1.0422 |
| 39 | 51.10 | 1.0343 | 1.0431 | 1.0430 | 1.0812 | 1.0812 | 1.0418 | 1.0420 |
| 40 | 21.71 | 1.0342 | 1.0429 | 1.0429 | 1.0811 | 1.0811 | 1.0417 | 1.0419 |
| 41 | 56.69 | 1.0341 | 1.0429 | 1.0428 | 1.0810 | 1.0810 | 1.0416 | 1.0418 |
| Gen No. | Power Generation, PG, MW | Reactive Power Generated as a Result of the Optimization, Q, M Var | |||||
|---|---|---|---|---|---|---|---|
| Objective Function F1 | Objective Function F2 | Objective Function F3 w1 = 0.7, w2 = 0.3 | |||||
| AIG | CS | AIG | CS | AIG | CS | ||
| G1 | 0.815 | 0.400 | 0.400 | 0.400 | 0.400 | 0.400 | 0.400 |
| G2 | 1.812 | 0.062 | 0.061 | 0.482 | 0.472 | 0.395 | 0.410 |
| G3 | 0.064 | −0.200 | −0.200 | 0.000 | 0.010 | −0.124 | −0.134 |
| G4 | 0.457 | 0.200 | 0.200 | 0.200 | 0.200 | 0.200 | 0.200 |
| Objective Function | Tap Changer Position | The Value of the Objective Function | ||
|---|---|---|---|---|
| AIG | CS | AIG | CS | |
| F1 | 4 | 4 | 0.000606 pu | 0.000606 pu |
| F2 | 2 | 2 | 17.914 kW | 17.912 kW |
| F3 (w1 = 0.7, w2 = 0.3) | 5 | 5 | 0.0032 pu | 0.0032 pu |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kacejko, P.; Pijarski, P. Optimal Voltage Control in MV Network with Distributed Generation. Energies 2021, 14, 469. https://doi.org/10.3390/en14020469
Kacejko P, Pijarski P. Optimal Voltage Control in MV Network with Distributed Generation. Energies. 2021; 14(2):469. https://doi.org/10.3390/en14020469
Chicago/Turabian StyleKacejko, Piotr, and Paweł Pijarski. 2021. "Optimal Voltage Control in MV Network with Distributed Generation" Energies 14, no. 2: 469. https://doi.org/10.3390/en14020469