
Structural Modeling and Failure Assessment of Spar-Type Substructure for 5 MW Floating Offshore Wind Turbine under Extreme Conditions in the East Sea


Abstract
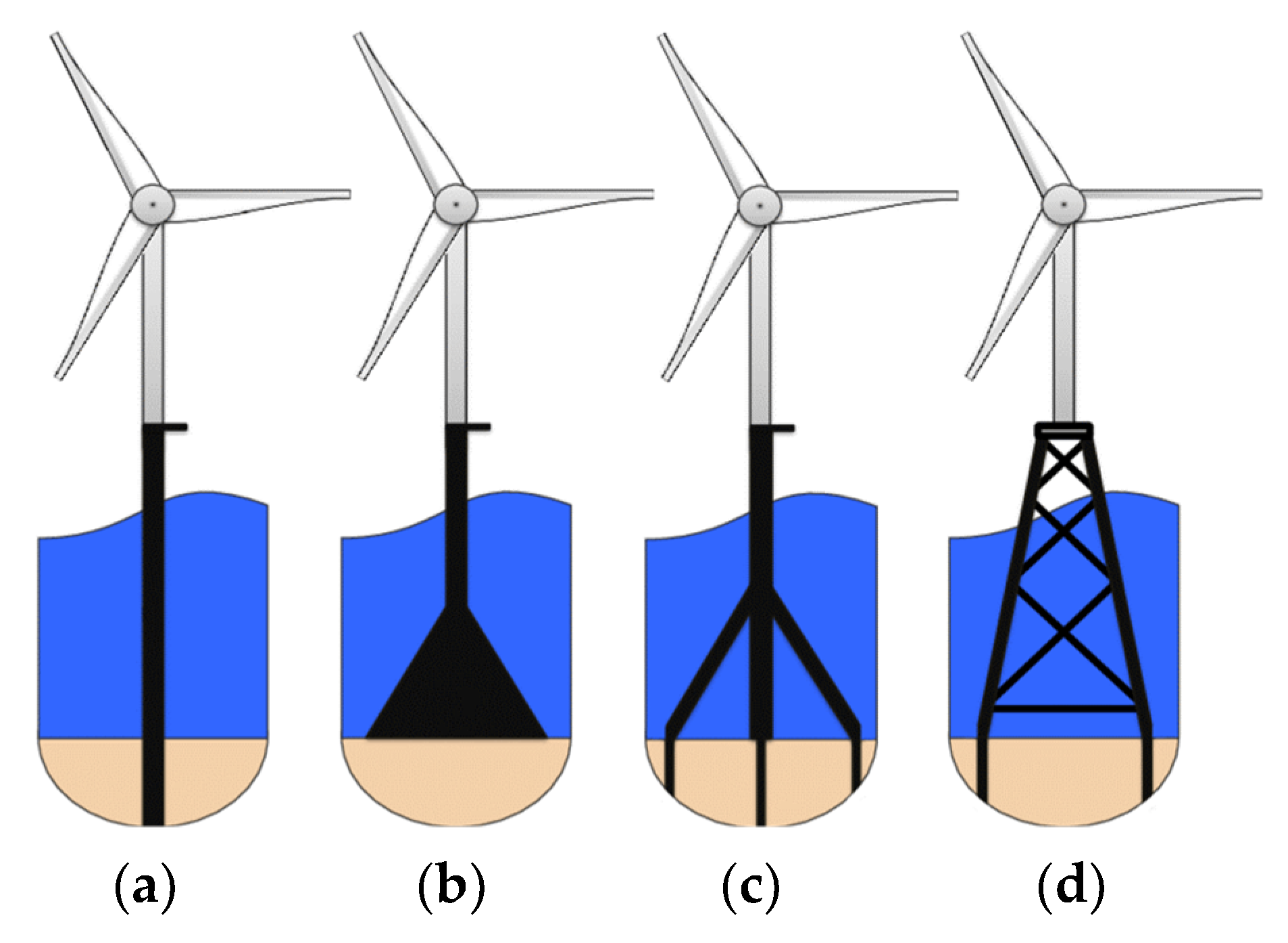
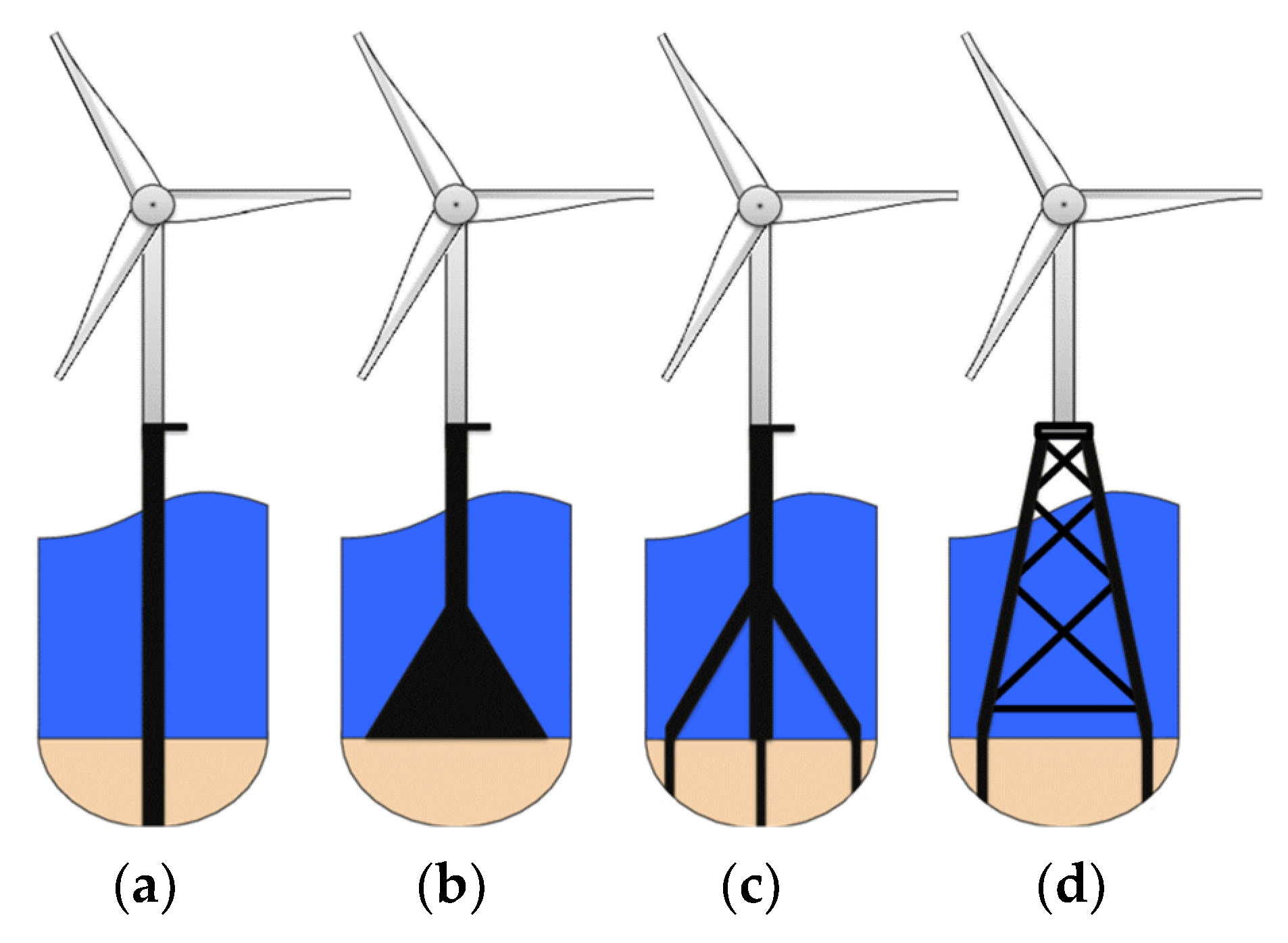
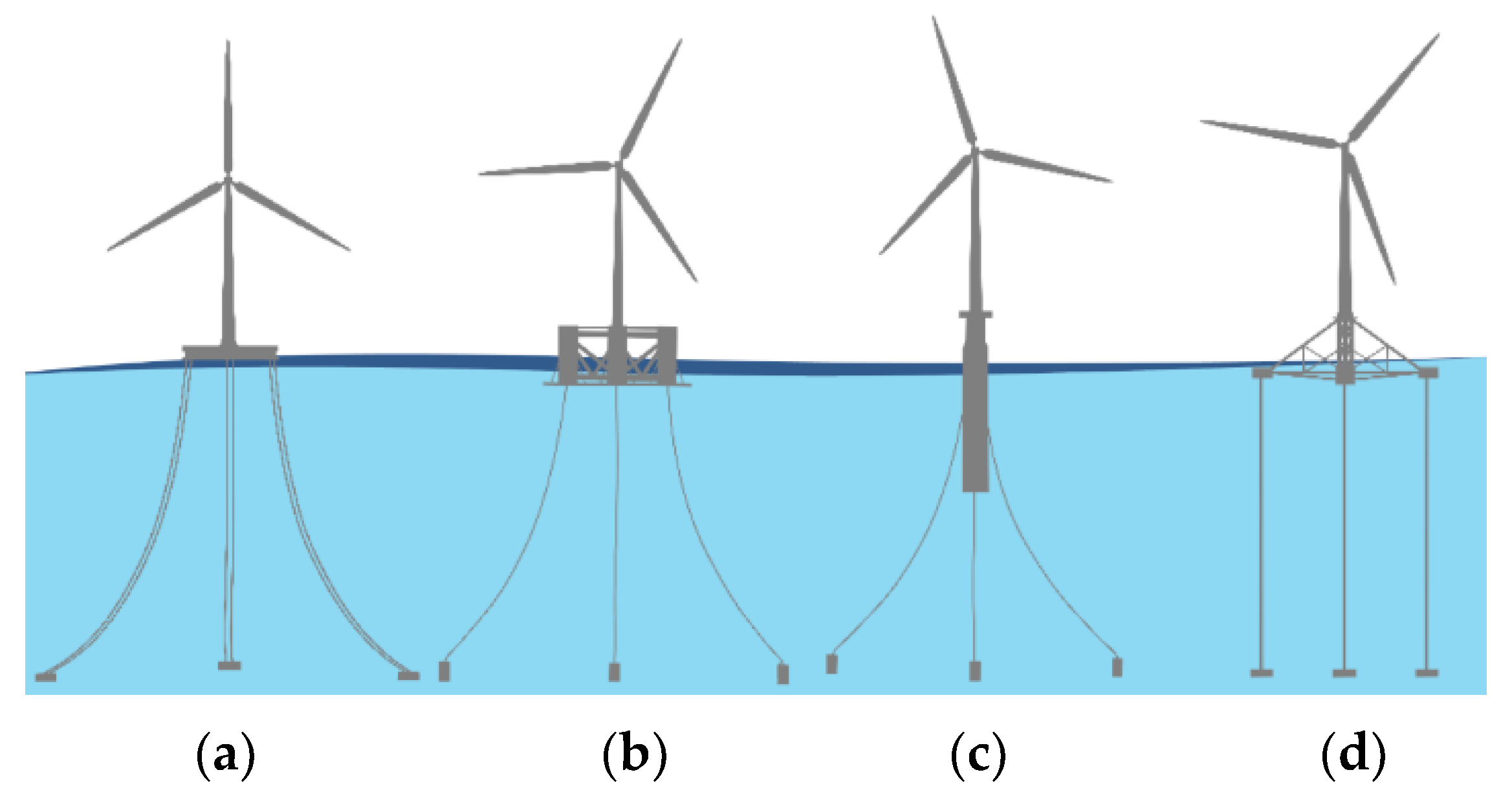
:1. Introduction
2. Specification of 5 MW FOWT
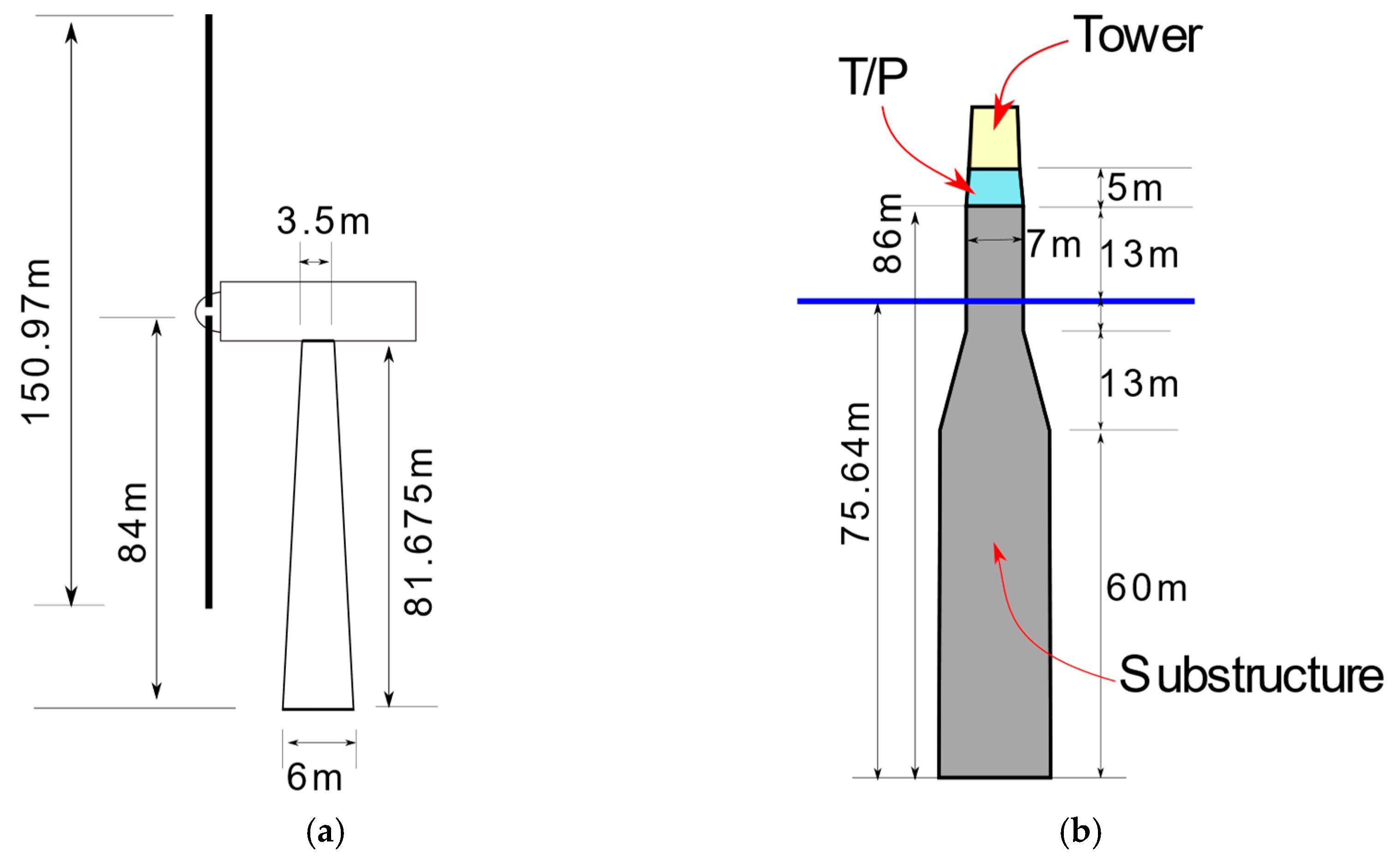
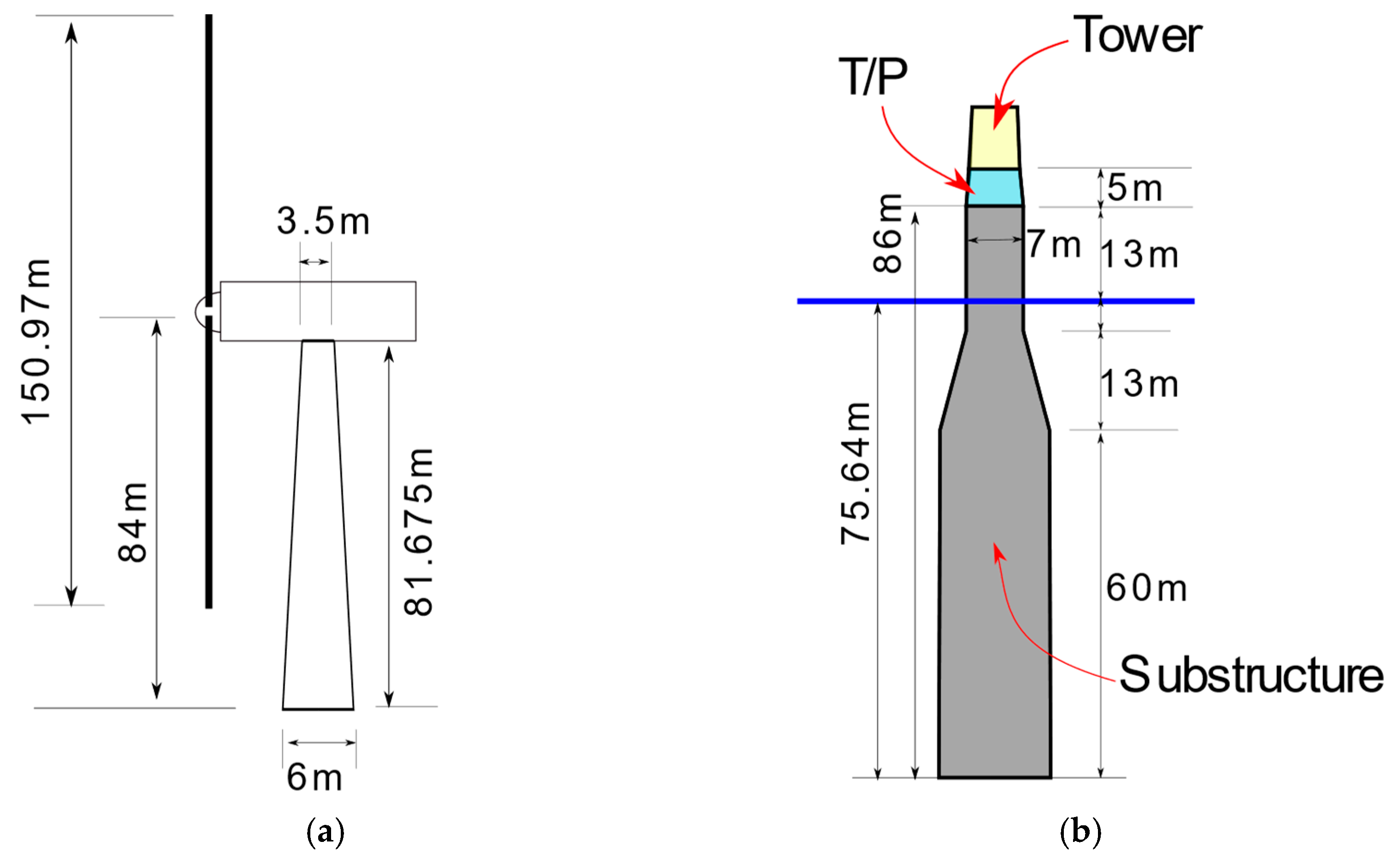
2.1. Overall Key Specifications and Schematic Layout
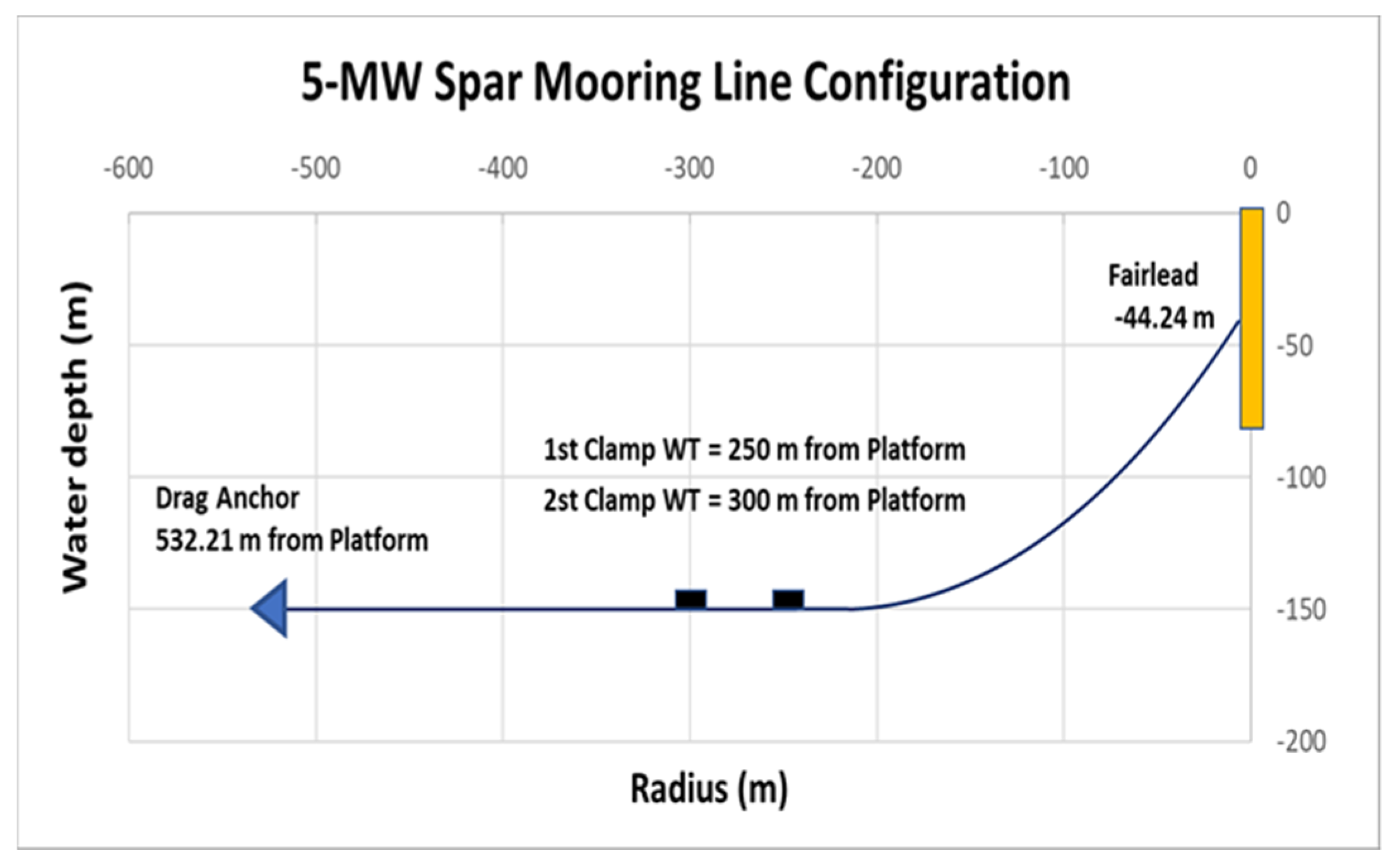
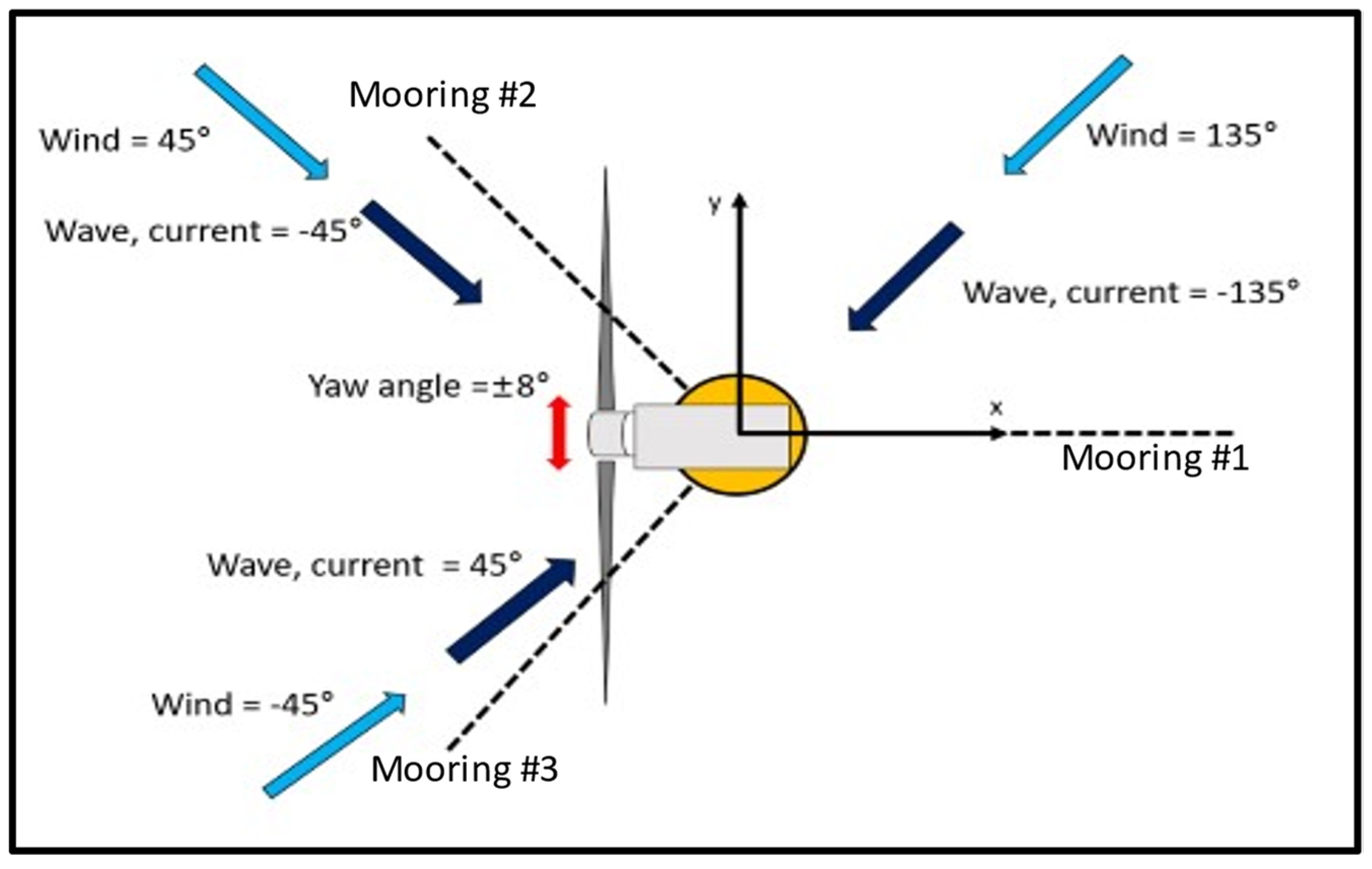
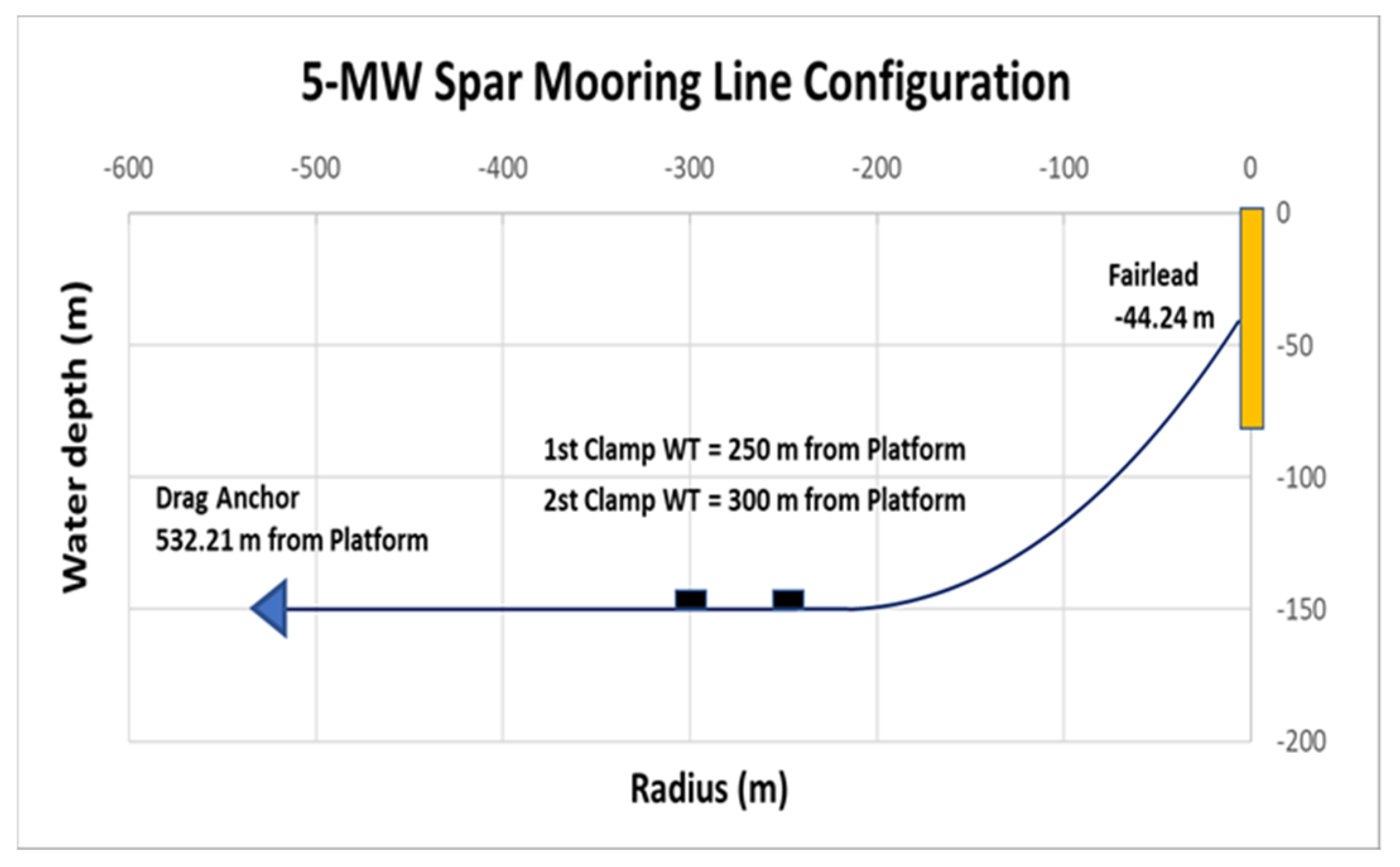
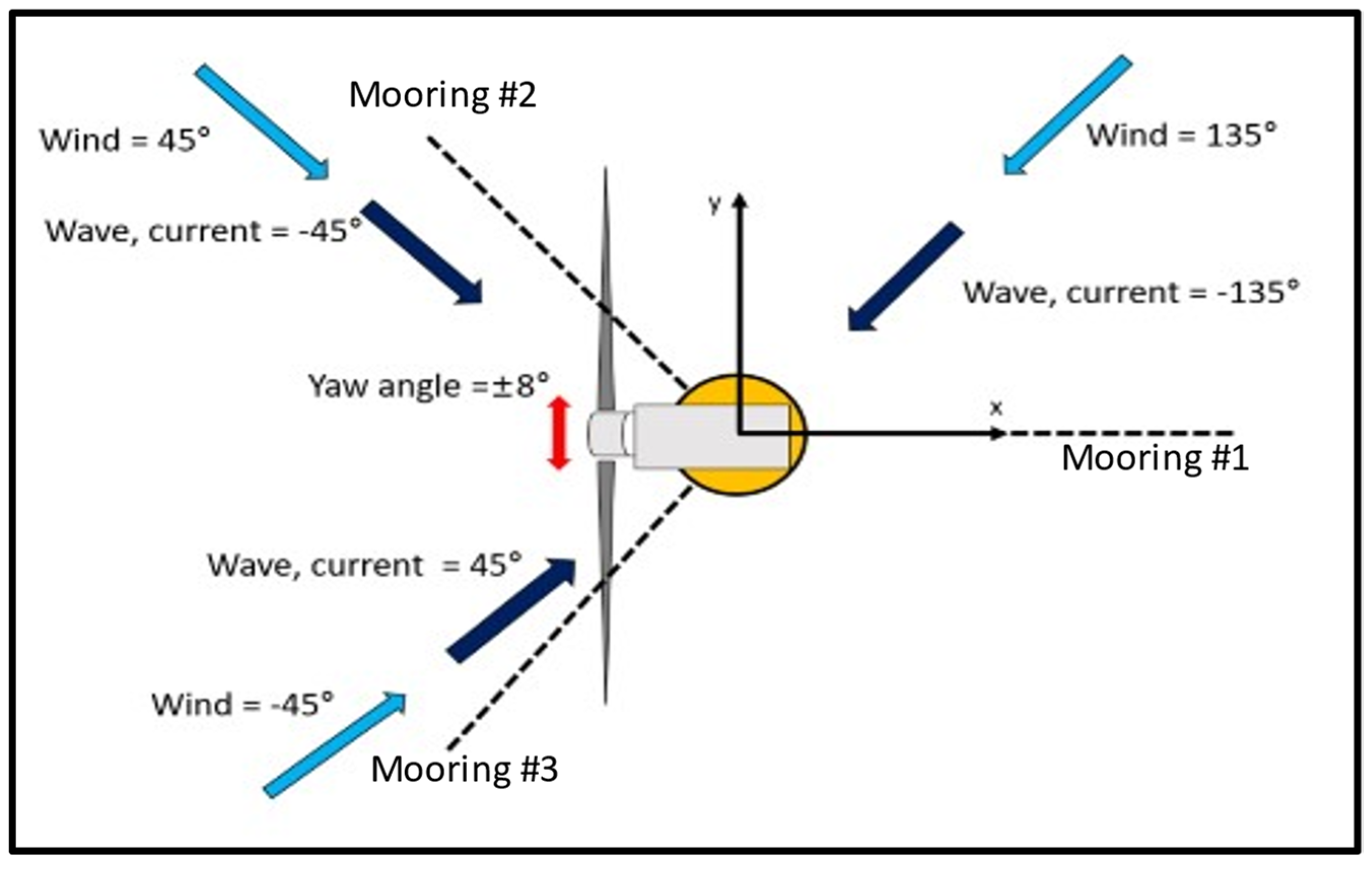
2.2. Mooring System Specification
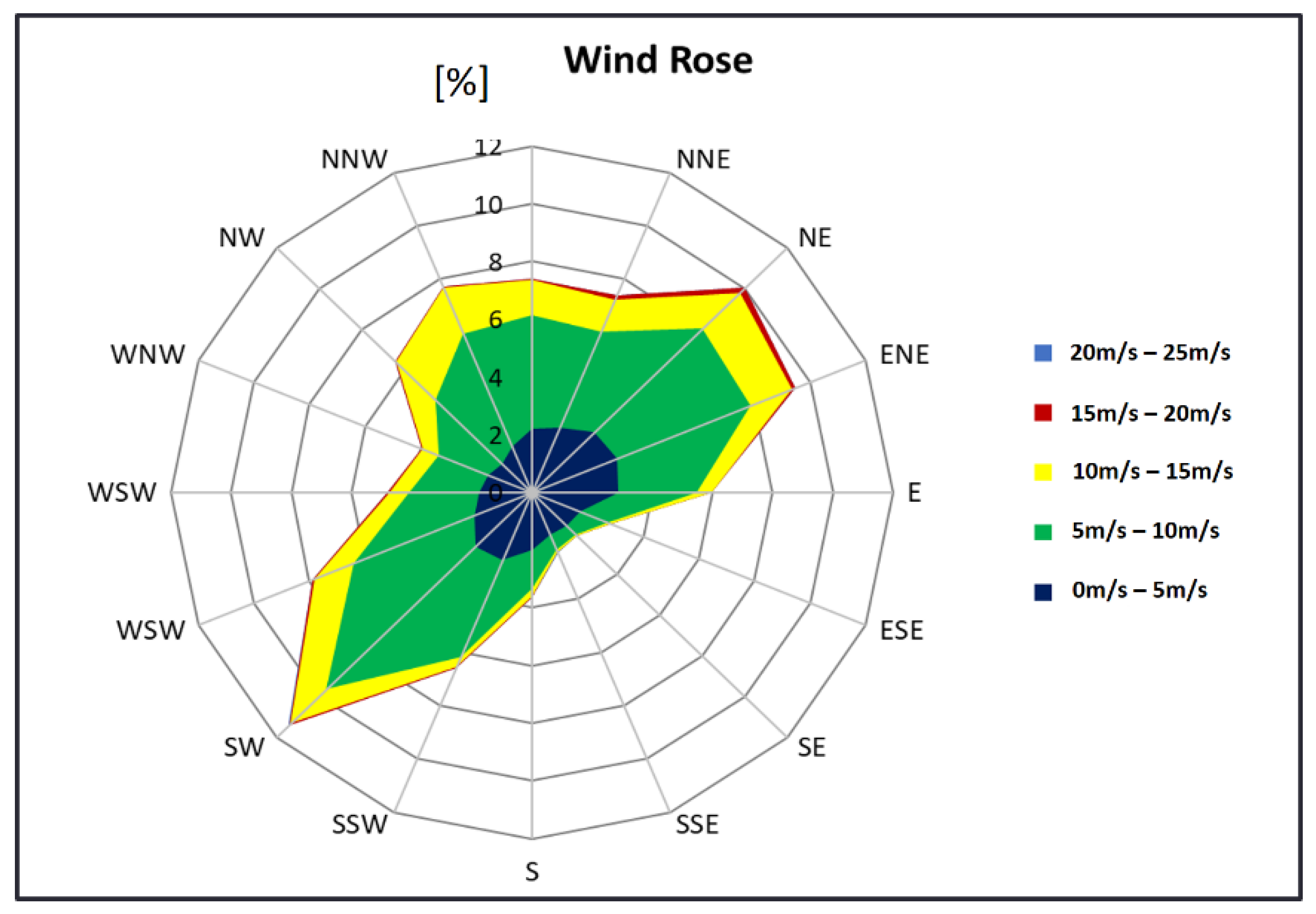
3. Extreme Environmental Conditions at the East Sea
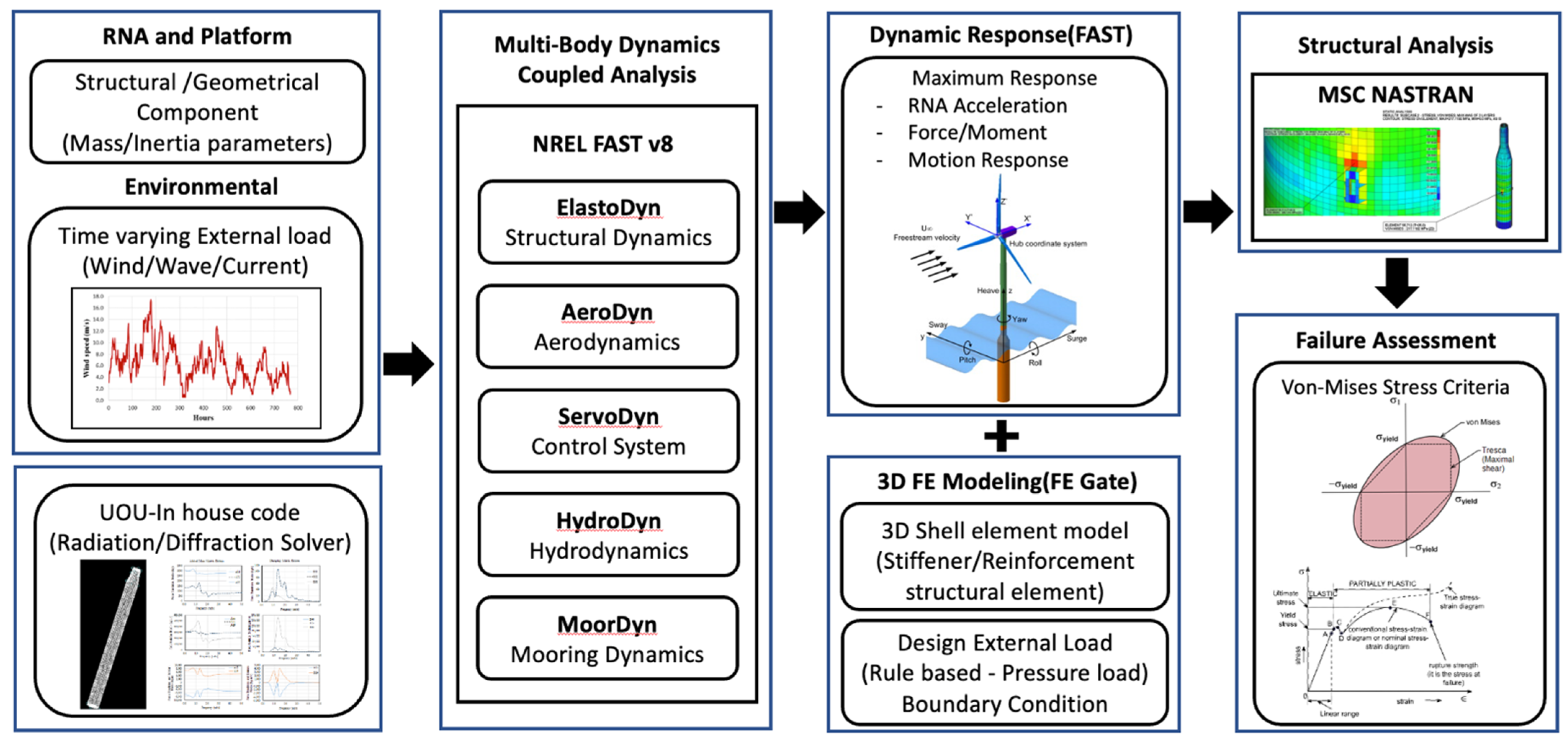
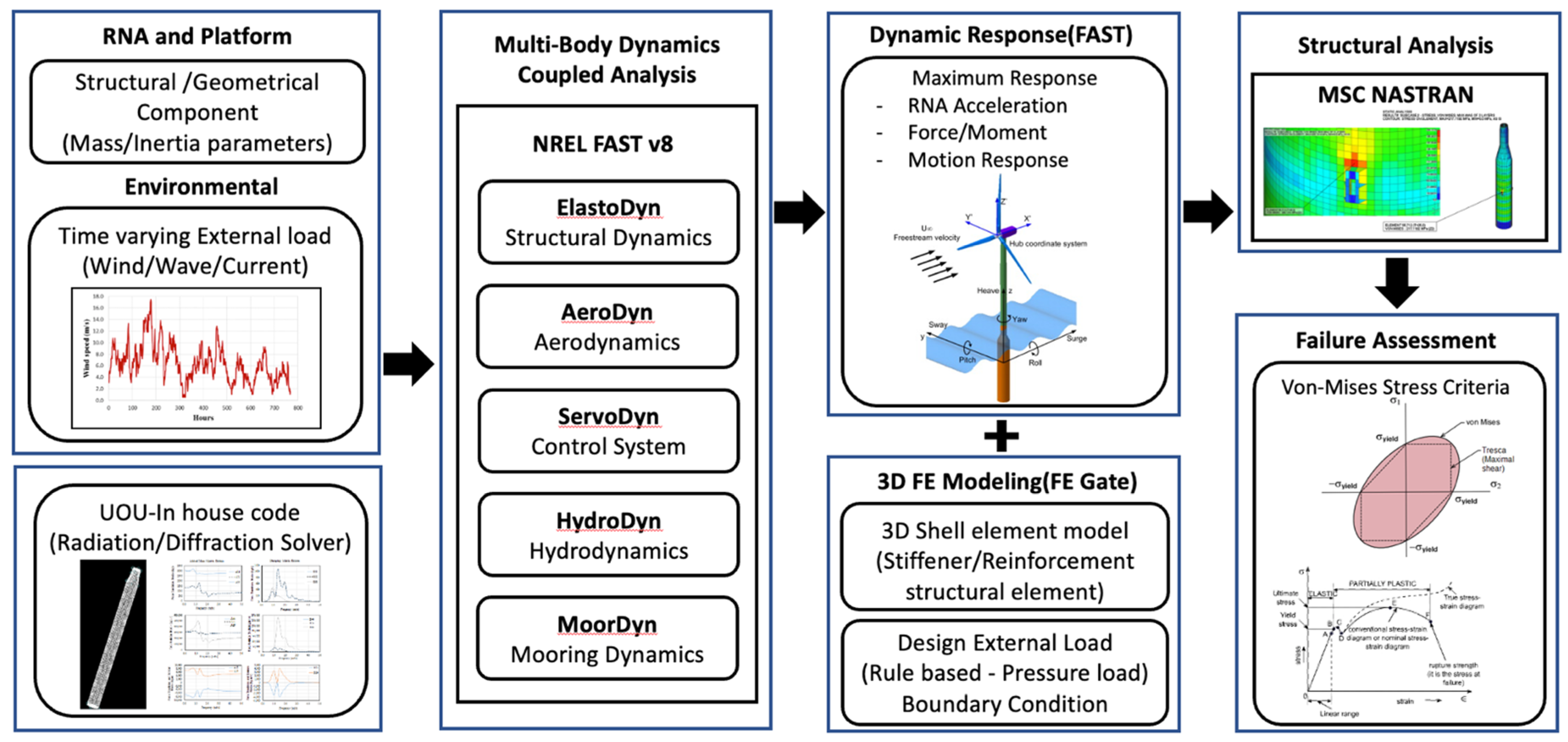
4. Fully Coupled Integrated Load Analysis
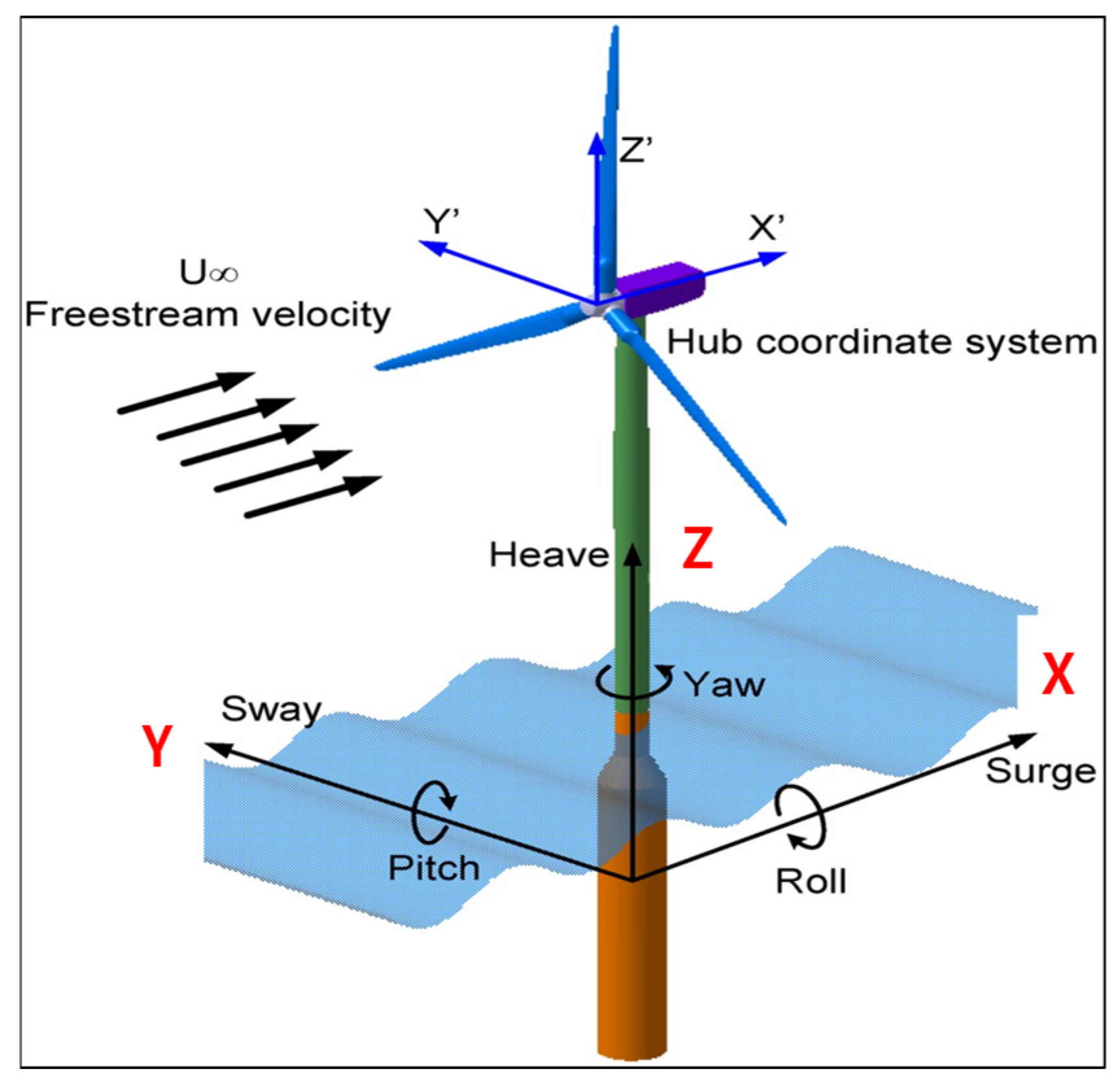
4.1. Integrated Design and Analysis Platform
- = acceleration parameter
- = 1.0 for extreme sea loads design load scenario
- = roll angle, in deg
- = roll period, in s
4.2. Dynamic Load Case (DLC)
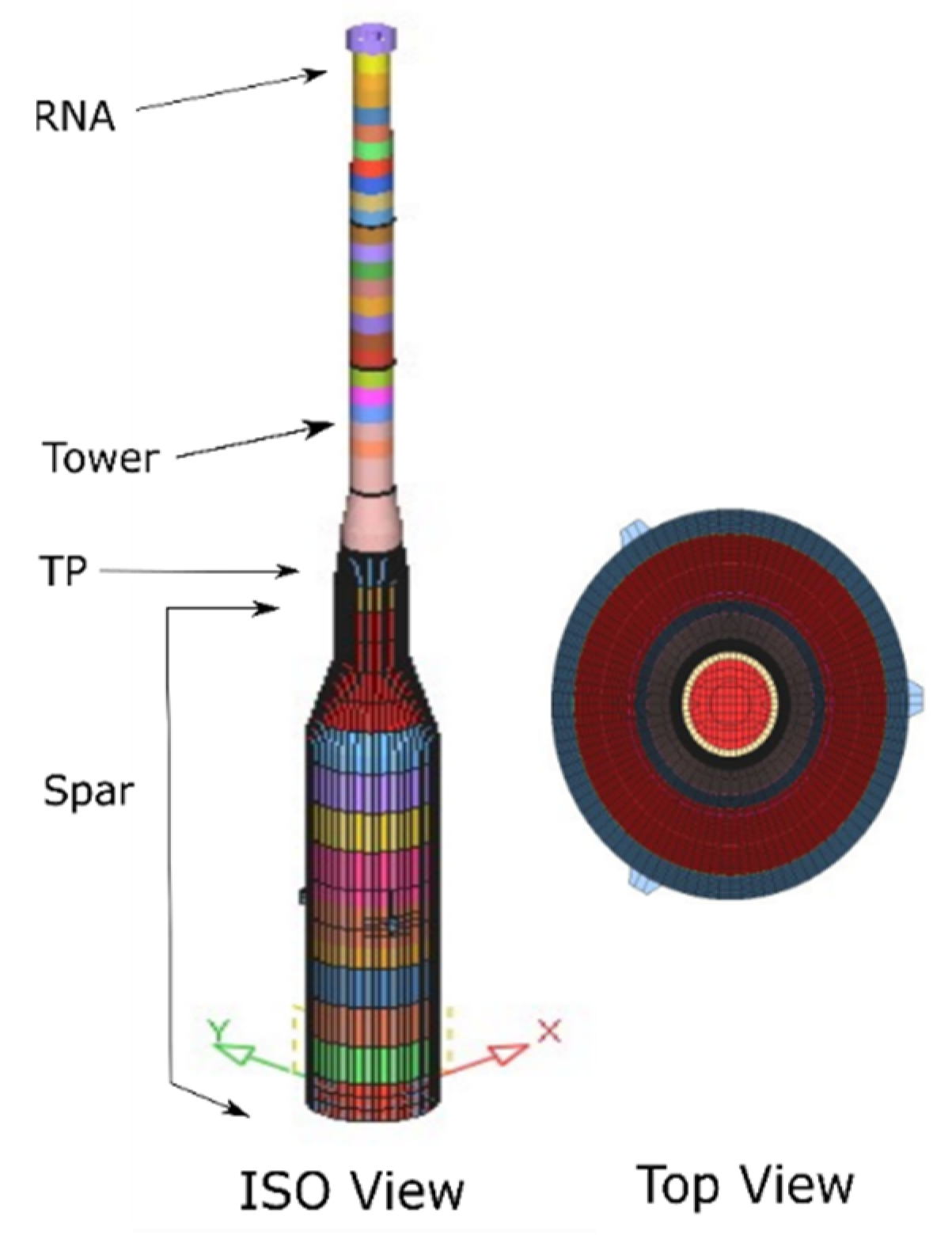
5. 3D Finite Element Modeling and Structural Analysis of a Spar-Type Substructure
5.1. 3D Finite Element Model
5.2. Structural Analysis Case
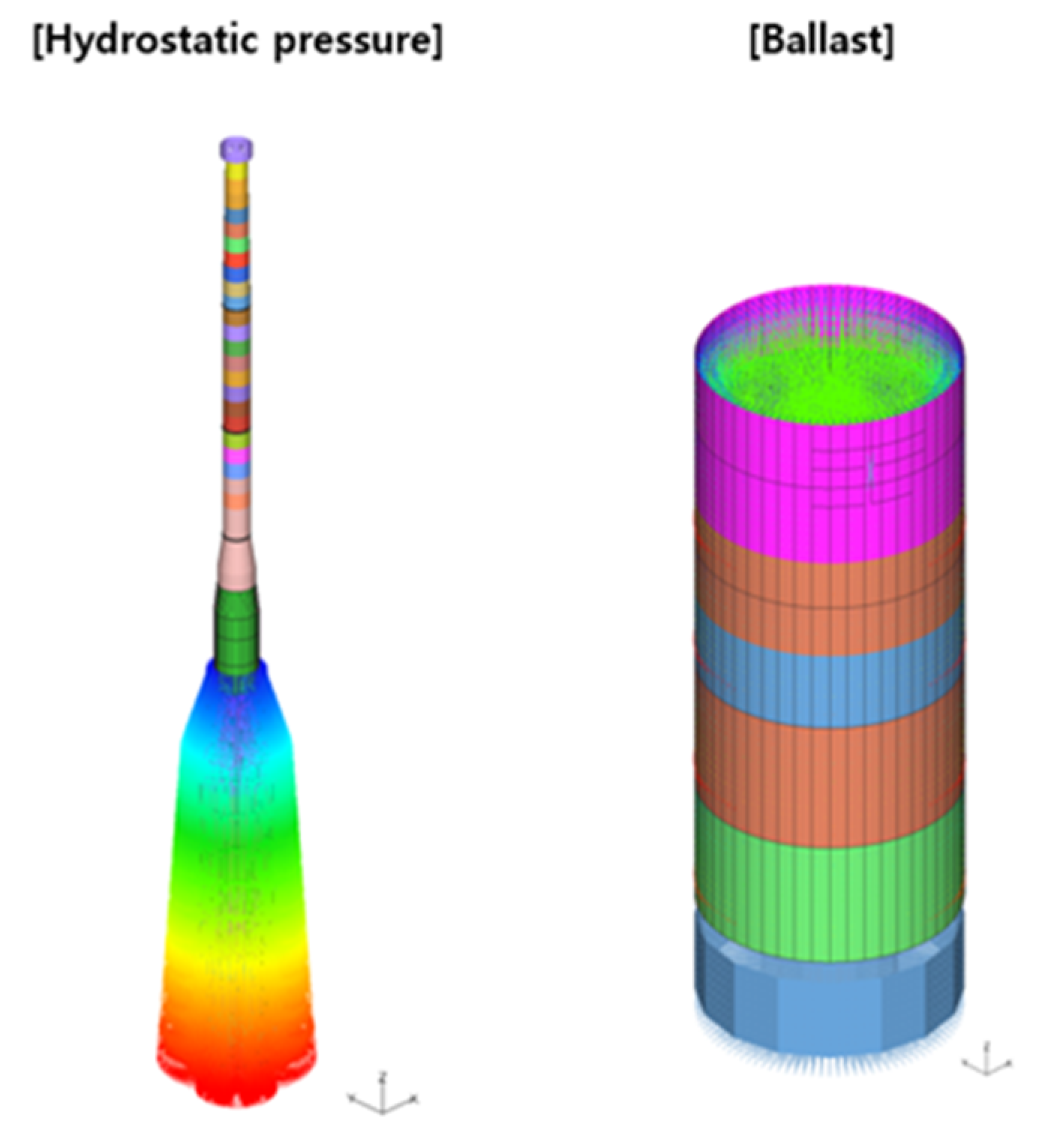
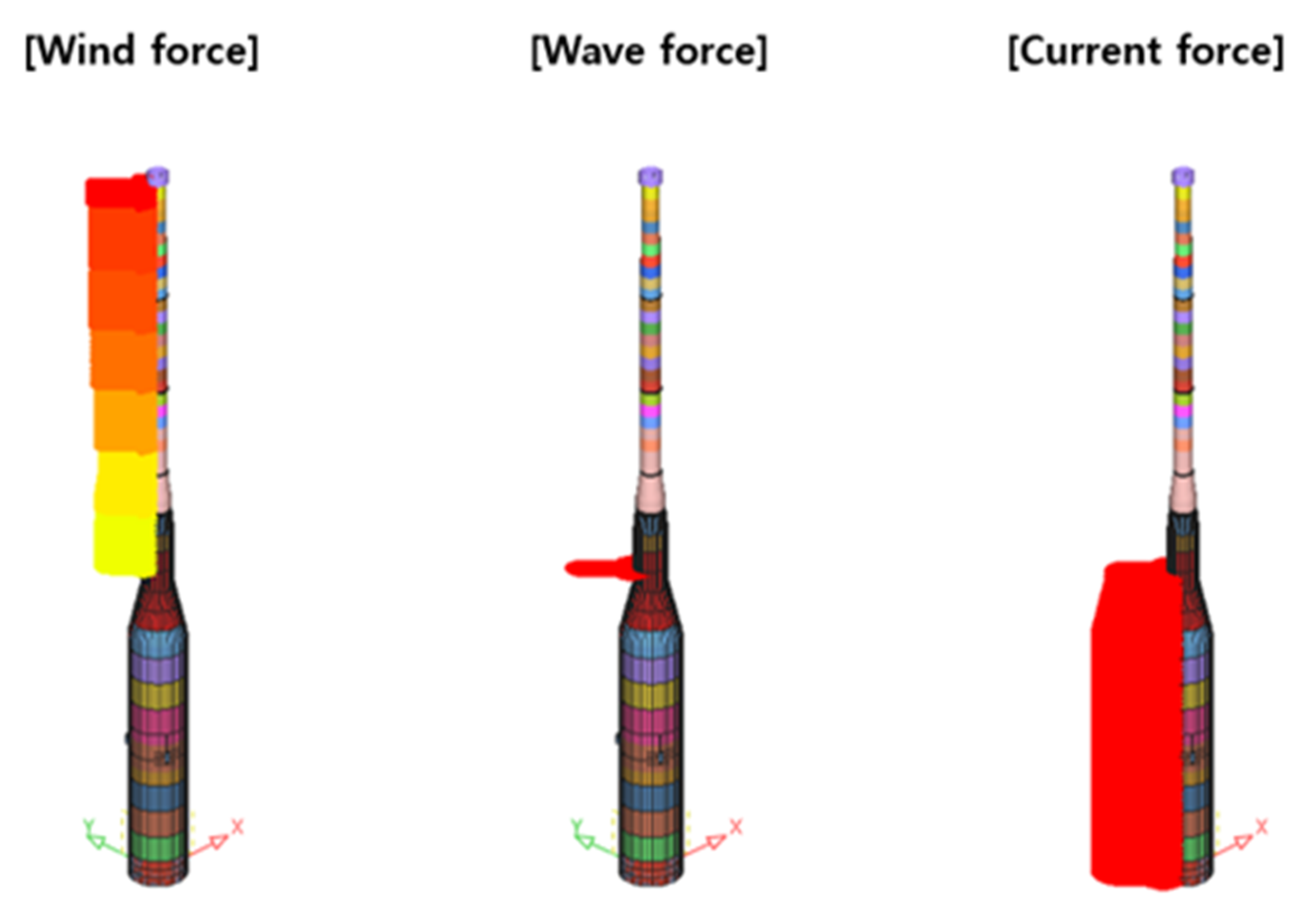
5.3. External Loadings
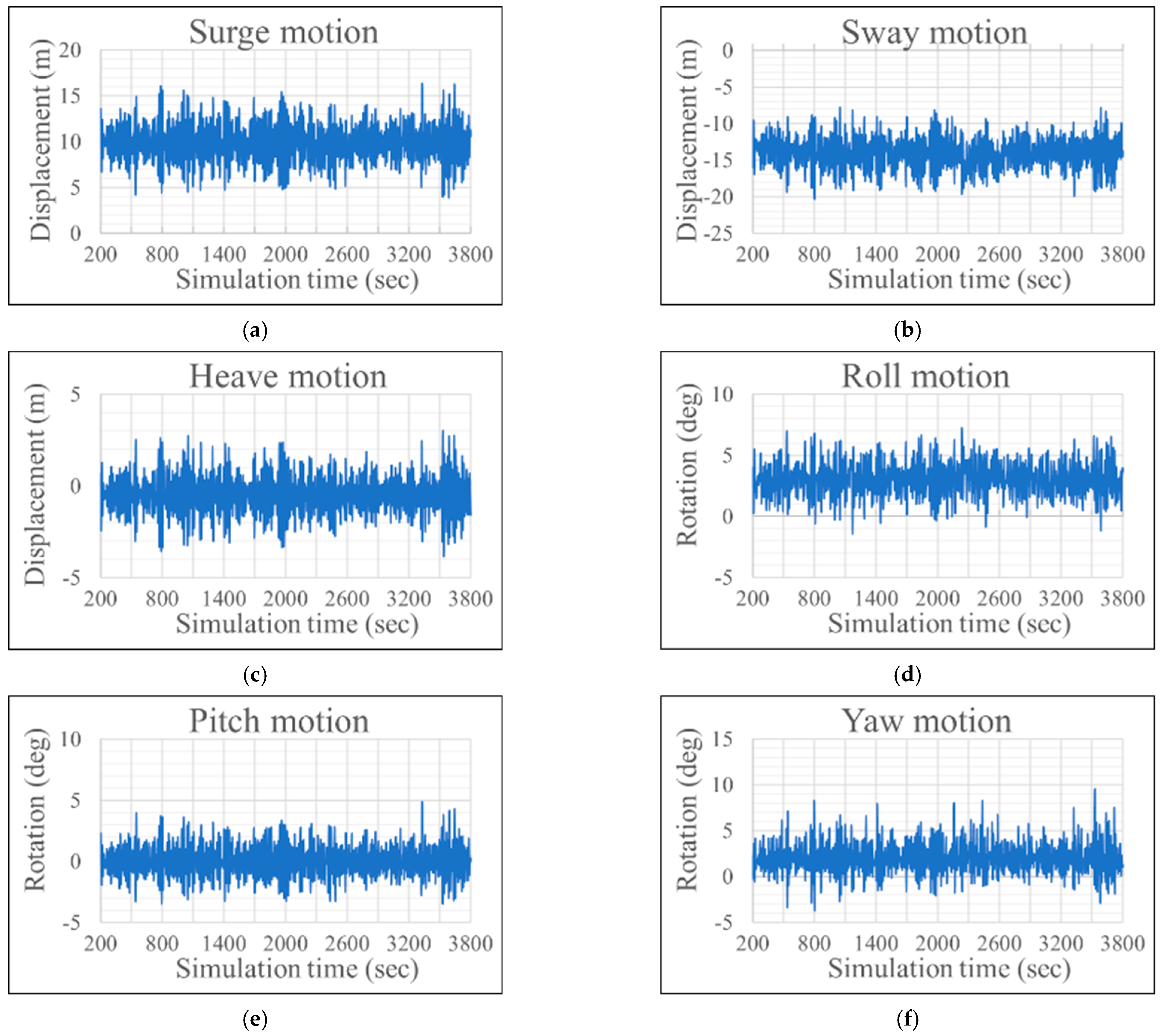
5.3.1. Dynamic Response from the DLC 6.1
5.3.2. Structural Loads
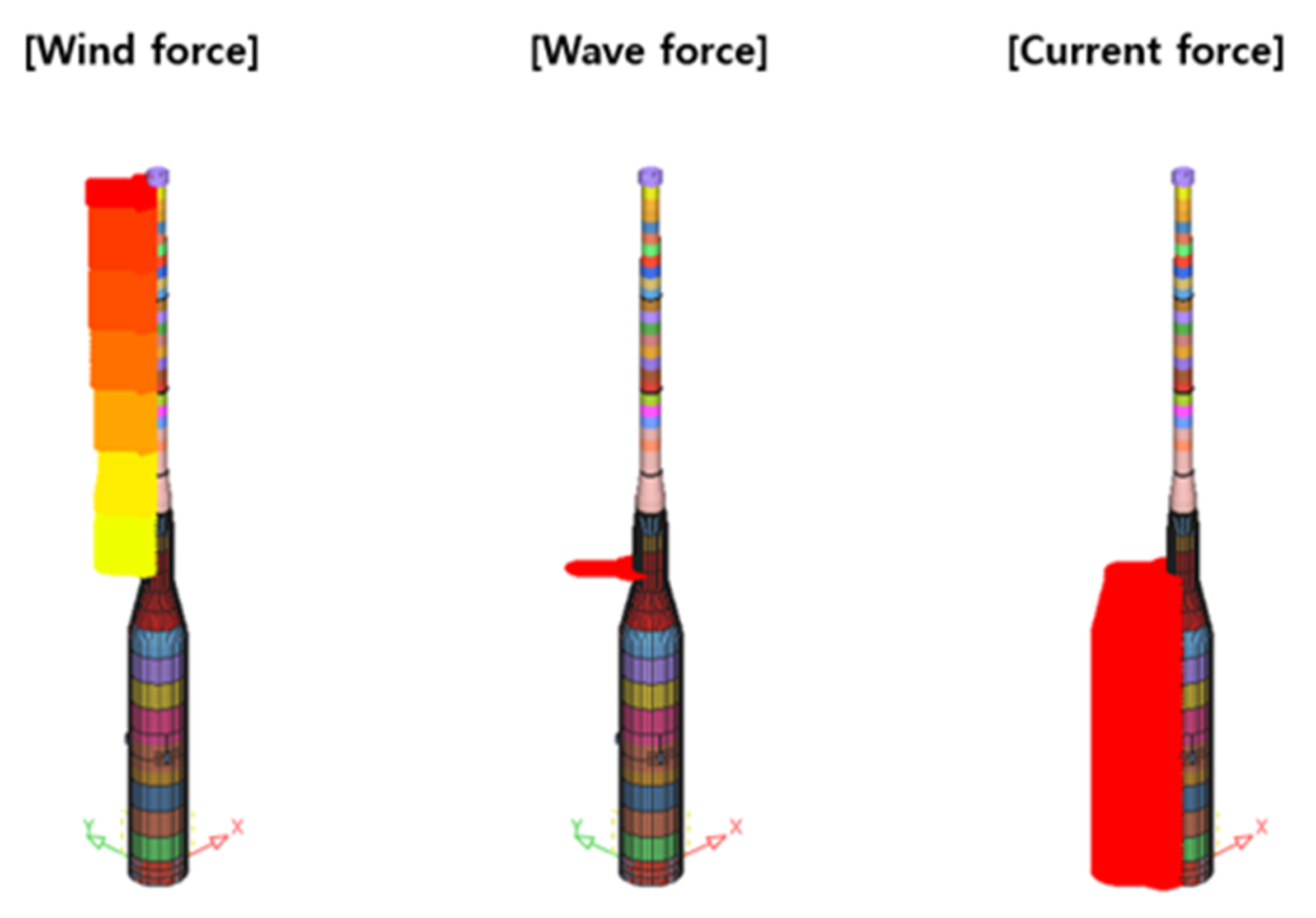
5.3.3. Wind Force
- = 0.611
- = wind velocity (m/s)
- = height coefficient (according to th height, 1.48)
- = shape coefficeint (cylindrical shapes, 0.5)
5.3.4. Wave Load
- = density of sea water (1025 kg/m3)
- = gravity acceleration (9.81 m/s2)
- = significant wave height (m)
- = breath of towed object (m)
5.3.5. Current Load
- = 1.025
- = projected width (m)
- = drag coefficeint
- = componenet of the velocity vector (m/s)
5.4. Failure Assessment
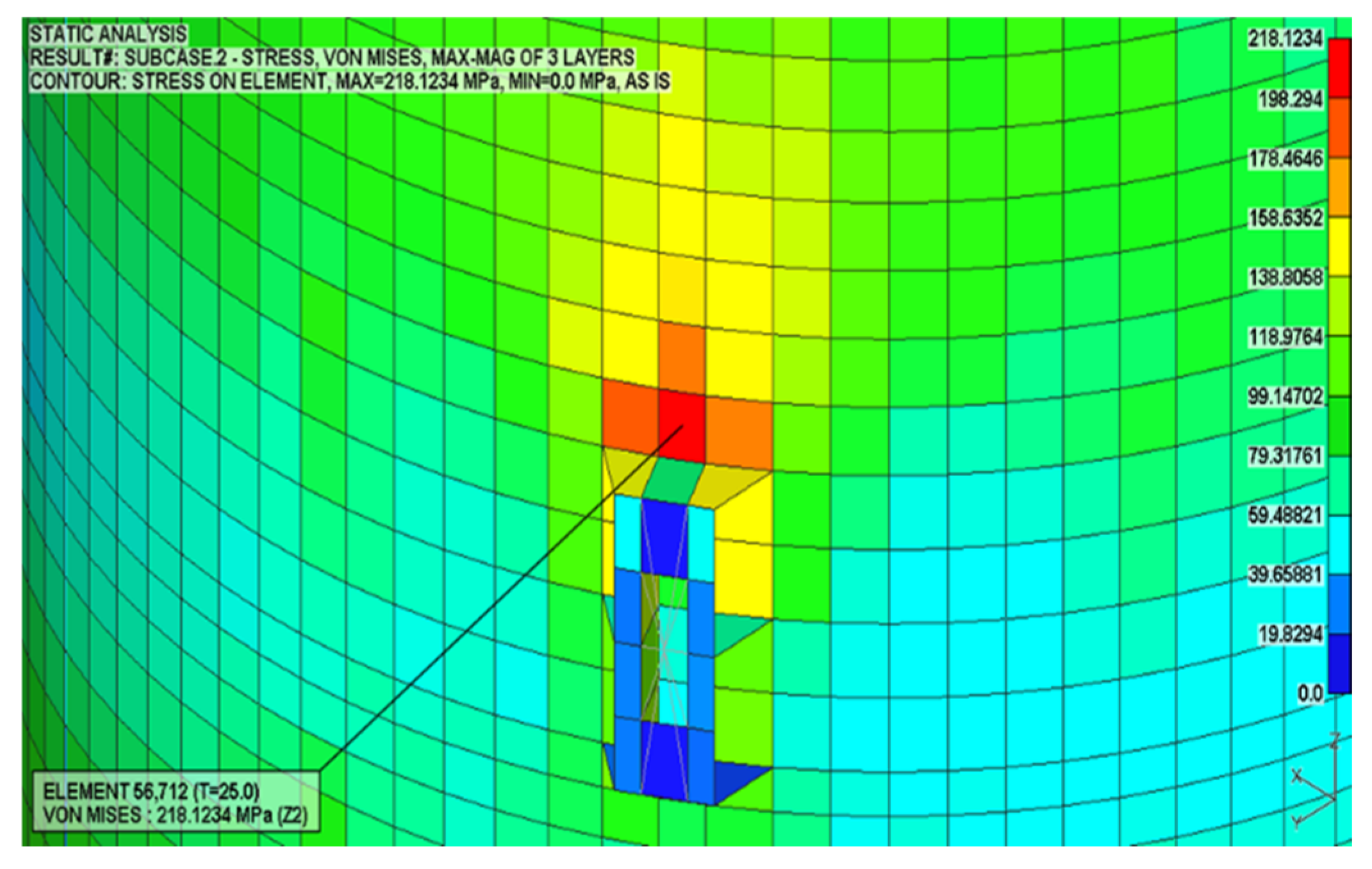
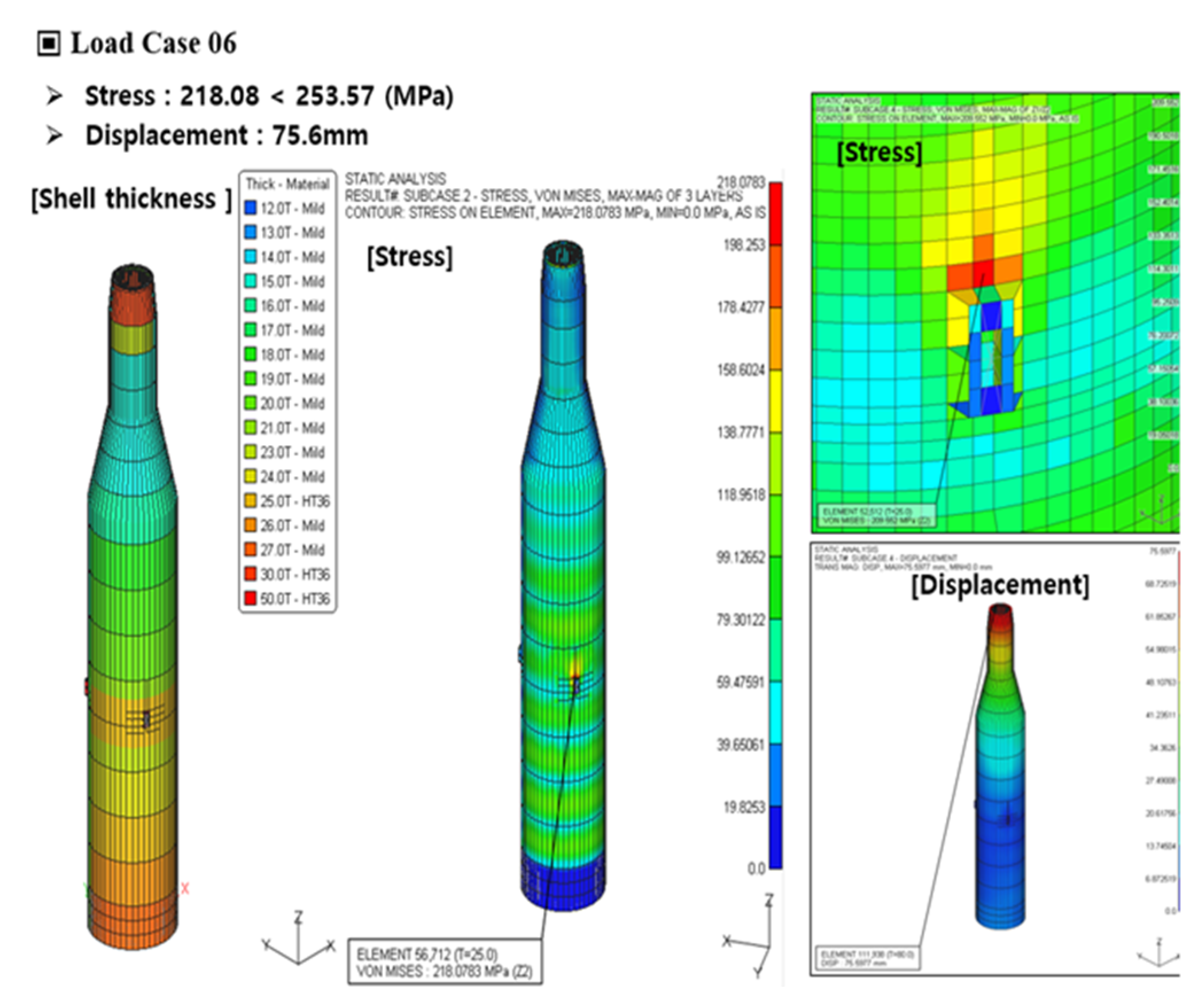
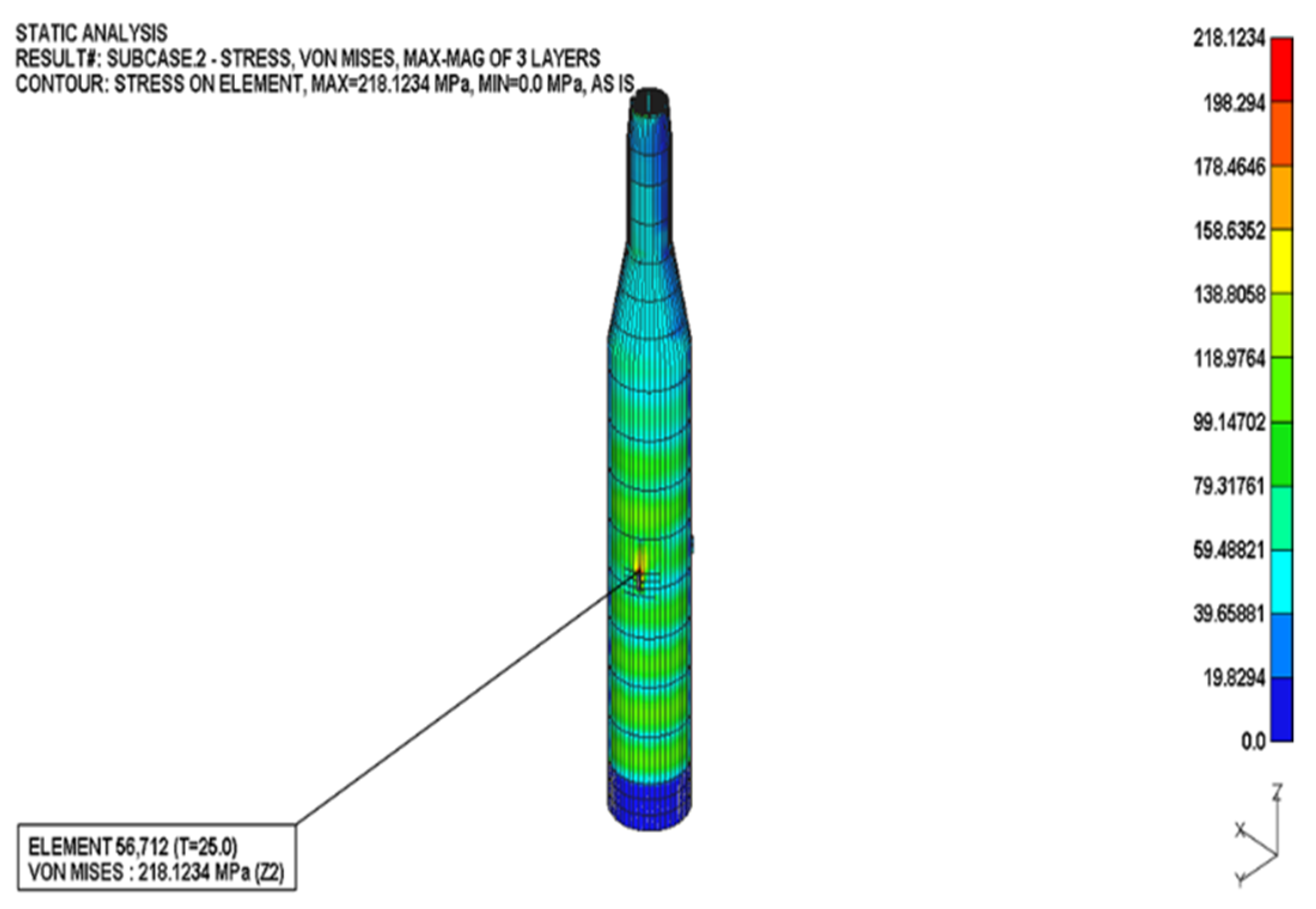
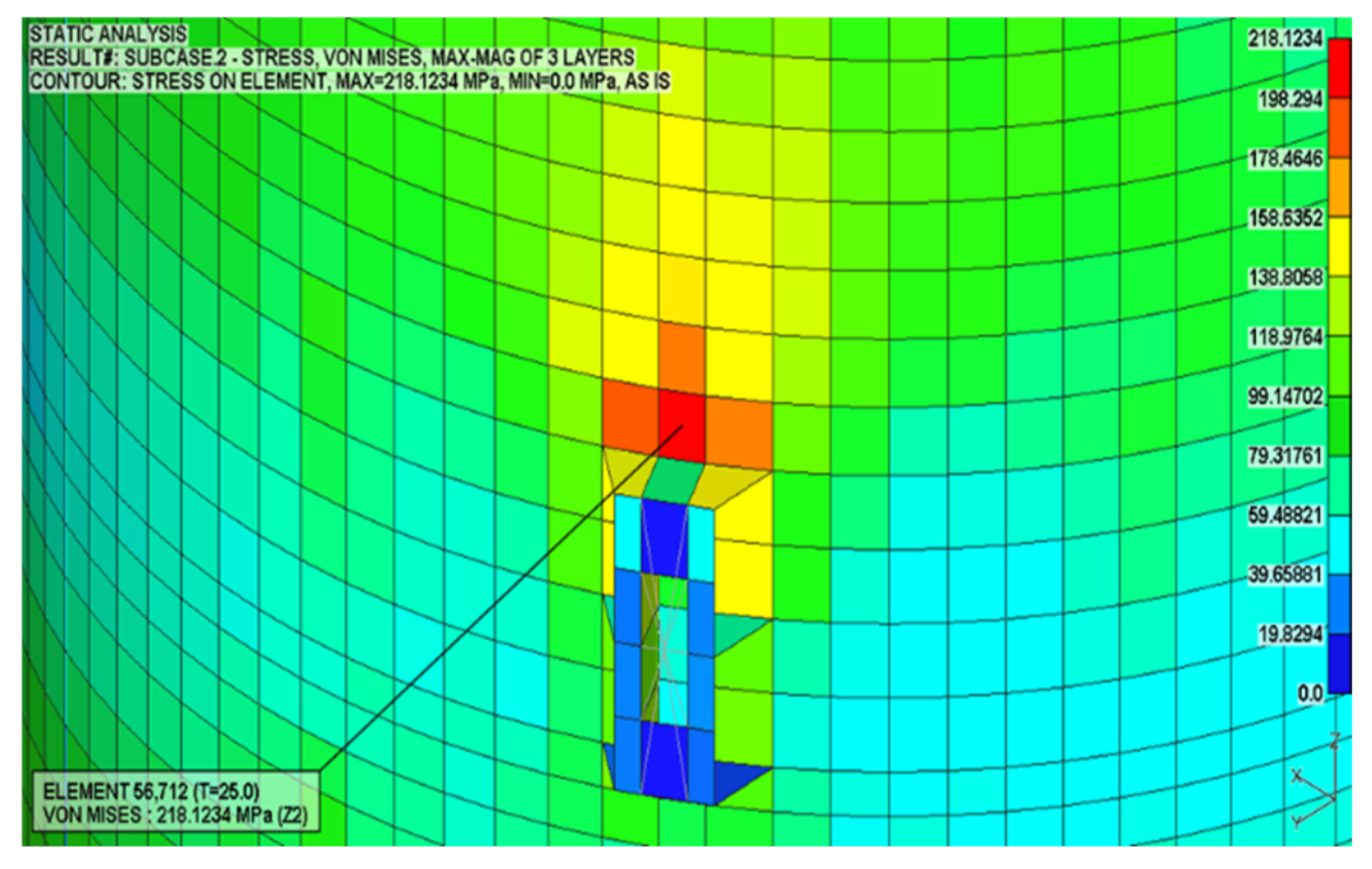
5.4.1. Stresses from the Substructure Platform
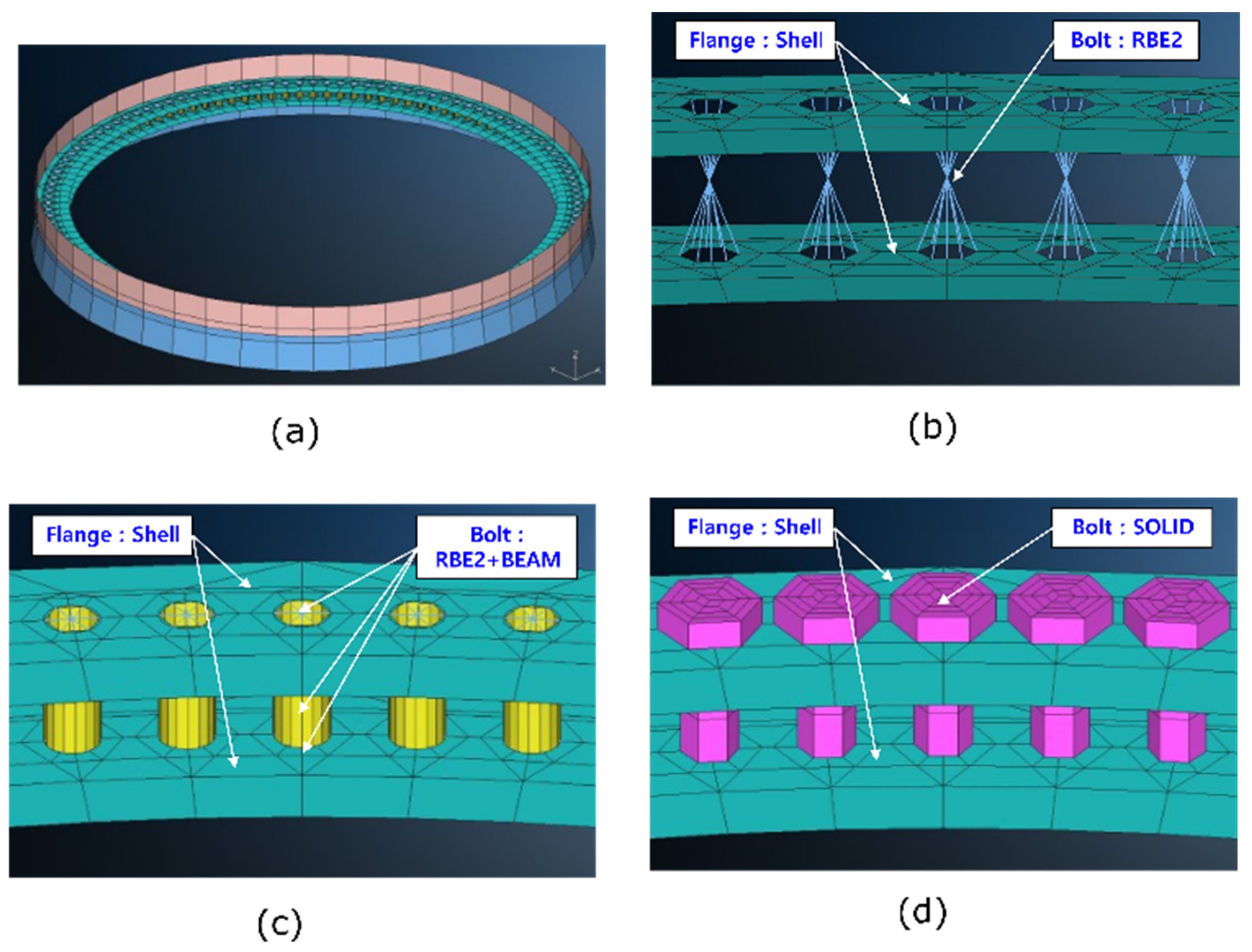
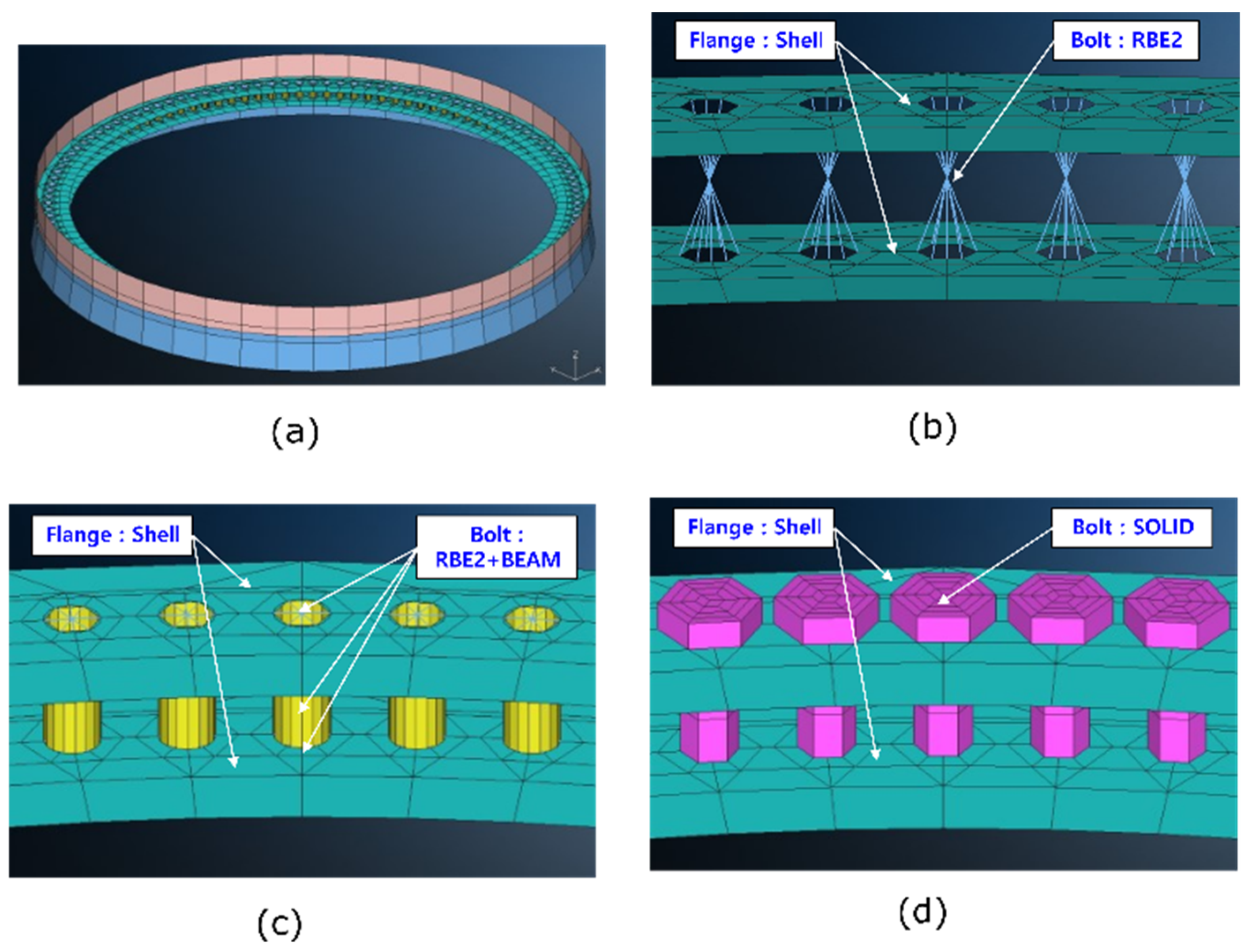
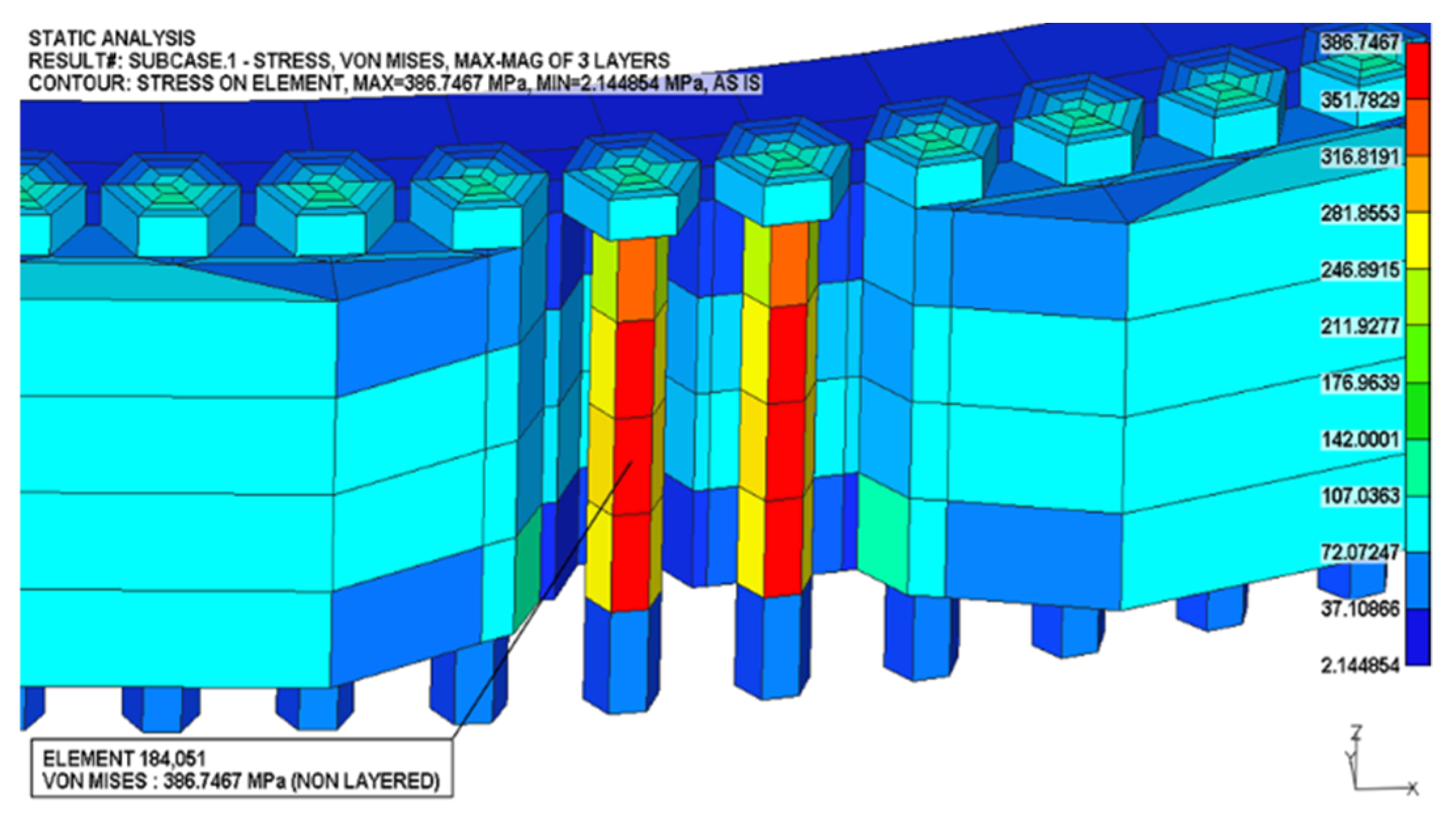
5.4.2. Stresses from the Bolted Joint Connection
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| CFD | Computational fluid dynamics |
| CM | Center of mass |
| FFT | Fast Fourier transform |
| FOWT | Floating offshore wind turbine |
| JONSWAP | Joint North Sea Wave Project |
| PM | Pierson–Moskowitz |
| QTF | Quadratic transfer function |
| RAO | Response amplitude operator |
| RWT | Reference wind turbine |
| S-FOWT | Superconducting floating offshore wind turbine |
| SWL | Still water level |
References
- Trevor, M. Future Energy, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 331–355. ISBN 9780081028865. [Google Scholar] [CrossRef]
- Krohn, S.; Morthorst, P.E.; Awerbuch, S. The Economics of Wind Energy; European Wind Energy Association: Brussels, Belgium, 2009; pp. 28–29. [Google Scholar]
- Mckenna, R.; Hollnaicher, S.; Leye, P.; Fichtner, W. Cost-potentials for large onshore wind turbines in Europe. Energy 2015, 83, 217–229. [Google Scholar] [CrossRef]
- Lantz, E.; Hand, M.; Wiser, R. The Past and Future Cost of Wind Energy. In Proceedings of the 2012 World Renewable Energy Forum Denver, Denver, CO, USA, 13–17 May 2012. NREL/CP-6A20-54526. [Google Scholar]
- Michael, H.; Ben, A.; Patrick, J.; AbuBakr, B. Assessing socially acceptable locations for onshore wind energy using a GIS-MCDA approach. Int. J. Low-Carbon Technol. 2019, 14, 160–169. [Google Scholar] [CrossRef]
- European Environment Agency. Europe’s Onshore and Offshore Wind Energy Potential an Assessment of Environmental and Economic Constraints; Technical Report Series, No. 6; EEA: Copenhagen, Denmark, 2019. [Google Scholar] [CrossRef]
- Konstantinidis, E.I.; Botsaris, P.N. Wind Turbines: Current status, obstacles, trends, and technologies. In IOP Conference Series: Materials Science and Engineering; IOP: Pireas, Greece, 2016. [Google Scholar] [CrossRef]
- Wehrmann, B. German Offshore Wind Power–Output, Business, and Perspectives, Clean Energy Wire. 2020. Available online: https://www.cleanenergywire.org/factsheets/german-offshore-wind-power-output-business-and-perspectives (accessed on 1 August 2021).
- WindEurope. Wind Energy in Europe in 2019–Trends and Statistics. 2020. Available online: https://windeurope.org/about-wind/statistics/european/wind-energy-in-europe-in-2019/ (accessed on 1 August 2021).
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application (Chapter 3); John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Hau, E. Wind Turbines: Fundamentals, Technologies, Application, Economics; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Seidel, M. Substructures for Offshore Wind Turbines CURRENT Trends and Developments; Festschrift Peter Schauma: Hannover, Germany, 2014. [Google Scholar] [CrossRef]
- Muhammad, A.; Brendan, O.K. Offshore wind-turbine structures: A review. Proc. Inst. Civ. Eng. Energy 2013, 166, 139–152. [Google Scholar] [CrossRef]
- Abhinav, K.A.; Saha, N. Dynamic Analysis of an Offshore Wind Turbine Including Soil Effects. Procedia Eng. 2015, 116, 32–39. [Google Scholar] [CrossRef] [Green Version]
- Plodpradit, P.; Dinh, V.N.; Kim, K.D. Coupled Analysis of Offshore Wind Turbine Jacket Structures with Pile-Soil-Structure Interaction Using FAST v8 and X-SEA. Appl. Sci. 2019, 9, 55. [Google Scholar] [CrossRef] [Green Version]
- Fabian, V.; Reuter, A. Fully-coupled Wind Turbine Simulation Including Substructuring of Support Structure Components: Influence of Newly Developed Modeling Approach on Fatigue Loads for an Offshore Wind Turbine on a Tripod Support Structure. In Proceedings of the 21st International Offshore and Polar Engineering Conference, Maui, HI, USA, 16–21 June 2011. [Google Scholar]
- Lai, W.J.; Lin, C.Y.; Huang, C.C.; Lee, R.M. Dynamic Analysis of Jacket Substructure for Offshore Wind Turbine Generators under Extreme Environmental Conditions. Appl. Sci. 2016, 6, 307. [Google Scholar] [CrossRef] [Green Version]
- Chen, I.W.; Wong, B.L.; Lin, Y.H.; Chau, S.W.; Huang, H.H. Design and Analysis of Jacket Substructures for Offshore Wind Turbines. Energies 2016, 9, 264. [Google Scholar] [CrossRef] [Green Version]
- Damiani, R. JacketSE: An Offshore Wind Turbine Jacket Sizing Tool; Theory Manual and Sample Usage with Preliminary Validation; TP-5000-65417; NREL: Golden, CO, USA, 2016. [Google Scholar] [CrossRef] [Green Version]
- Teh, N. Japan & South Korea Floating Offshore Wind 2019. Innovate UK Global Expert Mission; KTN: Lodon, UK, 2019. [Google Scholar]
- Kim, J.Y.; Kang, K.S.; Oh, K.Y.; Lee, J.S.; Ryu, M.S. A Study on the Site Selection of Offshore Wind Farm around Korean Peninsula. In Proceedings of the the 3rd International Conference on Ocean Energy (ICOE), Bilbao, Spain, 6–7 October 2010. [Google Scholar]
- IRENA. Floating Foundations: A Game Changer for Offshore Wind Power; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2016. [Google Scholar]
- DNVGL. DNVGL-ST-0119: Floating Wind Turbine Structures; DNV GL AS: Bærum, Norway, 2018. [Google Scholar]
- Jonkman, J. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; NREL/TP-500-41958; National Renewable Energy Laboratory: Golden, CO, USA, 2017. [Google Scholar]
- DNVGL Recommended Practice. In Coupled Analysis of Floating Wind Turbines; DNVGL-RP-0286; DNVGL: Bærum, Norway, 2019.
- Galán-Lavado, A.; Santos, M. Analysis of the Effects of the Location of Passive Control Devices on the Platform of a Floating Wind Turbine. Energies 2021, 14, 2850. [Google Scholar] [CrossRef]
- Villoslada, D.; Santos, M.; Tomás-Rodríguez, M. General Methodology for the Identification of Reduced Dynamic Models of Barge-Type Floating Wind Turbines. Energies 2021, 14, 3902. [Google Scholar] [CrossRef]
- Pimenta, F.; Ruzzo, C.; Failla, G.; Arena, F.; Alves, M.; Magalhães, F. Dynamic response characterization of floating structures based on numerical simulations. Energies 2020, 13, 5670. [Google Scholar] [CrossRef]
- Ruzzo, C.; Failla, G.; Collu, M.; Nava, V.; Fiamma, V.; Arena, F. Operational modal analysis of a spar-type floating platform using frequency domain decomposition method. Energies 2016, 9, 870. [Google Scholar] [CrossRef] [Green Version]
- Hassan, B.; Karmakar, D.; Carlos, G.S. Dynamic analysis of spar type floating offshore wind turbine. In Proceedings of the Coastal and Maritime Mediterranean Conference, Rhodes, Greece, 25–29 October 2011. [Google Scholar] [CrossRef]
- Choi, E.; Han, C.; Kim, H.; Park, S. Optimal Design of Floating Substructures for Spar-Type Wind Turbine Systems. Wind Struct. 2014, 18, 253–265. [Google Scholar] [CrossRef]
- Hegseth, J.M.; Bachynski, E.E.; Martins, J. Design Optimization of Spar Floating Wind Turbines Considering Different Control Strategies. J. Phys. Conf. Ser. 2020, 1669, 012010. [Google Scholar] [CrossRef]
- Van der Valk, P. Coupled Simulations of Wind Turbines and Offshore Support Structures: Strategies based on the Dynamic Substructuring Paradigm; Delft University of Technology: Delft, The Netherlands, 2014. [Google Scholar] [CrossRef]
- Shi, W.; Han, J.; Kim, C.; Lee, D.; Shin, K.; Park, H. Feasibility study of offshore wind turbine substructures for southwest offshore wind farm project in Korea. Renew. Energy 2015, 74, 406–413. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Buhl, M.L. FAST User’s Guide; National Renewable Energy Laboratory: Golden, CO, USA, 2005. [Google Scholar]
- NWTC Information Portal (FAST v8). National Renewable Energy Laboratory. Available online: https://nwtc.nrel/gov/FAST8 (accessed on 1 August 2021).
- ABS. Guide for Building and Classing Floating Offshore Wind Turbine Installations; ABS: Houston, TX, USA, 9 April 2013. [Google Scholar]
- Lene, H.A.; Kimon, A.; Andreas, M.; Jarett, G.; Knut, R. DNV GL Standard for Floating Wind Turbines; IOWTC: San Francisco, CA, USA, 2018. [Google Scholar] [CrossRef]
- API. Design and Analysis of Station keeping Systems for Floating Structures, 3rd ed.; API RP 2SK; API: Washington, DC, USA, 2005. [Google Scholar]
- IEC. Wind Energy Generation Systems-Part 3-1: Design Requirements for Fixed Wind Offshore Wind Turbines; IEC 61400-3-1, Edition 1.0.; IEC: Geneva, Switzerland, 2019. [Google Scholar]
- IEC. Wind Energy Generation Systems-Part 1: Design Requirements; IEC61400-1, Edition 4.0; IEC: Geneva, Switzerland, 2019. [Google Scholar]
- IEC. Wind Energy Generation System—Part 3-2: Design Requirements for Floating Offshore Wind Turbines; Technical Specification; IEC-61400-3-2, Edition 1.0; IEC: Geneva, Switzerland, 2019; ISBN 978-2-8322-5986-3. [Google Scholar]
- KHOA. 2017 National Oceanographic Survey Annual White Paper; 11-1192136-000032-01; Korea Hydrographic and Oceanographic Agency: Busan, Korea, 2018; pp. 314–316. (In Korean) [Google Scholar]
- Kim, J.B.; Shin, H.K. Validation of a 750 kW semi-submersible floating offshore wind turbine numerical model with model test data, part II: Model-II. Int. J. Nav. Archit. Ocean Eng. 2019, 12, 213–225. [Google Scholar] [CrossRef]
- Hall, M. MoorDyn User’s Guide; Department of Mechanical Engineering, University of Maine: Orono, ME, USA, 2015. [Google Scholar]
- DNVGL. Rules for Classification, Ships, Part 3 Hull, Chapter 4 Loads; DNVGL-RU-SHIP-Pt3Ch4; DNVGL: Bærum, Norway, 2019. [Google Scholar]
- Natarajan, A.; Hansen, M.H.; Wang, S. Design Load Basis for Offshore Wind Turbines: DTU Wind Energy Report No. E-0133; DTU: Lyngby, Denmark, 2016. [Google Scholar]
- Dassault Systems. CATIA V5; Dassault Systems: San Diego, CA, USA, 2020. [Google Scholar]
- RAONX Solutions, FEGate, SVC Incorporation. 2019. Available online: http://www.svd.co.kr/product_fegate1.html (accessed on 1 August 2021).
- Hexagon, MSC Software, MSC Nastran. Available online: https://www.mscsoftware.com/product/msc-nastran (accessed on 1 August 2021).
- DNV. Design of Offshore Steel Structures, General-LRFD Method; DNVGL-OS-C101; DNVGL: Bærum, Norway, 2019. [Google Scholar]
- DNV. Determination of Structural Capacity by Non-Linear FE Analysis Methods; DNV-RP-C208; DNVGL: Bærum, Norway, 2013. [Google Scholar]
- ABS-MODU. Mobile Offshore Drilling Units (Part 3), Hull Construction and Equipment; ABS: Sring, TX, USA, 2017. [Google Scholar]
- ISO. Mechanical Properties of Fasteners Made of Carbon Steel and Alloy Steel–Part 1: Bolts, Screws, and Studs with Specified Property Classes–Coarse Thread and Fine Pitch Thread, 4th ed.; ISO 898-1; ISO: Geneva, Switzerland, 2019. [Google Scholar]
- Tran, T.; Kim, D.-H. The platform pitching motion of floating offshore wind turbine: A preliminary unsteady aerodynamic analysis. J. Wind. Eng. Ind. Aerodyn. 2015, 142, 65–81. [Google Scholar] [CrossRef] [Green Version]
- DNV. Modelling and Analysis of Marine Operations; DNV-RP-H103; DNVGL: Bærum, Norway, 2011. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Rated power | 5 MW |
| Rotor Orientation, configuration | Upwind, 3 blades |
| Control | Variable speed, collective pitch |
| Drivetrain | High speed, multiple-stage gearbox |
| Rotor, hub diameter | 150.97 m, 3 m |
| Hub height | 99.36 m |
| Cut-in, rated, cut-out wind speed | 3 m/s, 10.8 m/s, 22 m/s |
| Cut-in, rated rotor speed | 6.0 rpm, 11.3 rpm |
| Overhang, shaft tilt, pre-cone | 5 m, 5°, 2.5° |
| Description | Value | |
|---|---|---|
| Rotor | Diameter | 150.97 m |
| Projected area | 17,900.7 m2 | |
| Mass | 126,602 kg | |
| Nacelle | Length | 12.0 m |
| Breadth | 4.5 m | |
| Height | 4.7 m | |
| Mass | 200,000 kg | |
| Tower | Diameter at top | 3.5 m |
| Diameter at base | 6.0 m | |
| Height | 81.675 m | |
| Mass | 383,549 kg | |
| Description | Unit | Value | ||
|---|---|---|---|---|
| FOWT (total) | Length (depth) | m | 91.0 | |
| Draft | m | 75.64 | ||
| Freeboard | m | 15.36 | ||
| CB (center of buoyancy) | m | 34.561 | ||
| CG (center of gravity) | m | 27.100 | ||
| Platform | Hull | Weight | t | 1471.2 |
| VCG | m | 32.281 | ||
| Equipment | Weight | t | 107 | |
| VCG | m | 86.000 | ||
| Subtotal | Weight | t | 1579 | |
| VCG | m | 35.932 | ||
| Ballast | Concrete | Weight | t | 3093.9 |
| VCG | m | 2.99 | ||
| Water | Weight | t | 3785.7 | |
| VCG | m | 20.37 | ||
| Platform + ballast | Weight | t | 8458.1 | |
| Freeboard | m | 28.568 | ||
| CB (center of buoyancy) | m | 31.107 | ||
| CG (center of gravity) | m | 15.826 | ||
| Roll inertia | t × m2 | 1,261,706 | ||
| Pitch inertia | t × m2 | 1,228,964 | ||
| Yaw inertia | t × m2 | 353,848 | ||
| Description | Unit | Value |
|---|---|---|
| Number of Mooring lines | - | 3 |
| Chain type | - | R4 Studless |
| MBL | kN | 13,573 |
| Angle between adjacent lines | deg. | 120.0 |
| Depth to anchors below SWL (water depth) | m | 150.0 |
| Depth to fairleads below SWL | m | 44.24 |
| Radius to anchors from floater centerline | m | 532.21 |
| Radius to fairleads from floater centerline | m | 7.5 |
| Unstretched mooring line length | m | 560.0 |
| Mooring ling diameter | m | 0.12 |
| Equivalent mooring line mass density | kg/m | 288.0 |
| Equivalent mooring line weight in water | N/m | 250.0 |
| Equivalent mooring line extensional stiffness | N | 1,229,760,000 |
| Drag anchor ultimate holding capacity | ton | 612.0 |
| Clamp Weight (Concrete Block) | ||
| L × B × H | m | 2.8 × 2.6 × 2.6 |
| Dry weight | kg | 39,400 |
| Wet weight | kg | 20,000 |
| Type | Items | Unit | 50-yr |
|---|---|---|---|
| Wind | 10 min at 10 m height | m/s | 30.99 |
| 10 min at hub height | m/s | 39.83 | |
| 1 h at 10 m height | m/s | 29.44 | |
| 1 h at hub height | m/s | 37.49 | |
| Direction | deg | 45/225/337.5 | |
| Exponent for profile | - | 0.11 | |
| Wave | Significant wave height | m | 11.117 |
| Spectral peak period | s | 14.171 | |
| Maximum wave height | m | 17.859 | |
| Direction | deg | 0 | |
| Current | Surface | m/s | 1.63 |
| Intermediate | m/s | 0.61 | |
| Bottom | m/s | 0.34 | |
| Direction | deg | 12 | |
| Tide | Highest design water level | m | 1.48 |
| Lowest design water level | m | 0 |
| Turbine Operational Mode | DLC | Floater Type | Wind Condition | Environmental Directions | Wave & Wind Misalignment | Yaw Error | Wind Speed at Hub | Wave Condition | Current | Water Level | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Wind | Wave | Current | Hs | Tp | |||||||||
| (deg) | (deg) | (deg) | (deg) | (m/s) | (m) | (s) | (m/s) | ||||||
| Parked (Idling) | 6.1 | Spar | 50 years Storm | 45 | 45 | 45 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 11.996 | 1.63 | MSL |
| 45 | 45 | 45 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 13.726 | 1.63 | MSL | ||||
| 45 | 45 | 45 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 15.455 | 1.63 | MSL | ||||
| −45 | −45 | −45 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 11.996 | 1.63 | MSL | ||||
| −45 | −45 | −45 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 13.726 | 1.63 | MSL | ||||
| −45 | −45 | −45 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 15.455 | 1.63 | MSL | ||||
| −135 | −135 | −135 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 11.996 | 1.63 | MSL | ||||
| −135 | −135 | −135 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 13.726 | 1.63 | MSL | ||||
| −135 | −135 | −135 | Co-direction | −8, 0, +8 | 39.832 | 11.117 | 15.455 | 1.63 | MSL | ||||
| Description | Mild Steel (Grade A) | AH36/DH36 |
|---|---|---|
| Elastic modulus | 206,000 MPa | 206,000 MPa |
| Poisson ratio | 0.3 | 0.3 |
| Yield stress | 235 MPa | 355 MPa |
| Tensile stress | 400 MPa | 490 MPa |
| Material factor (k) | 1 | 0.72 |
| Safety factor | 1.43 | 1.43 |
| Allowable stress | 167.86 | 253.57 |
| Grade | Tensile Strength (MPa) | Stress under Proof Load (MPa) |
|---|---|---|
| 10.9 | 1000 | 830.0 |
| Case No. | Description |
|---|---|
| LC01 | Max. X-dir. moment (tower base) |
| LC02 | Max. Y-dir. moment (tower base) |
| LC03 | Max. Z-dir. moment (tower base) |
| LC04 | Max. X-dir. force (tower base) |
| LC05 | Max. Y-dir. force (tower base) |
| LC06 | Max. mooring tension |
| LC07 | Max. surge motion |
| LC08 | Max. sway motion |
| LC09 | Max. heave motion |
| LC10 | Max. roll motion |
| LC11 | Max. pitch motion |
| LC12 | Max. yaw motion |
| Case No. | Environment Angle (deg) | Surge | Sway | Heave | Roll | Pitch | Yaw |
|---|---|---|---|---|---|---|---|
| Displacement (m) | Displacement (m) | Displacement (m) | Displacement (deg) | Displacement (deg) | Displacement (deg) | ||
| Acceleration (m/s2) | Acceleration (m/s2) | Acceleration (m/s2) | Acceleration (deg/s2) | Acceleration (deg/s2) | Acceleration (deg/s2) | ||
| LC01 | 45 | 16.17 | −18.98 | −3.38 | 6.82 | 3.71 | 13.63 |
| 1.578 | −1.685 | −0.836 | 1.209 | 1.113 | 5.568 | ||
| LC02 | 135 | −19.01 | −25.90 | −3.57 | 4.60 | −4.19 | 3.28 |
| 1.540 | −1.564 | −0.809 | 1.025 | 0.933 | 1.914 | ||
| LC03 | 315 | 14.65 | 18.97 | −3.37 | −6.59 | 3.68 | −19.13 |
| 1.602 | 1.694 | −0.845 | −1.25 | −1.148 | −9.355 | ||
| LC04 | 315 | 16.56 | 18.35 | −3.43 | −6.33 | 3.96 | −14.84 |
| 1.589 | 1.677 | −0.8437 | −1.198 | 1.078 | 6.945 | ||
| LC05 | 45 | 16.17 | −18.98 | −3.38 | 6.82 | 3.71 | 13.63 |
| 1.578 | −1.685 | −0.873 | 1.209 | 1.113 | 5.568 | ||
| LC06 | 45 | 16.34 | −20.33 | −3.85 | 7.24 | 4.89 | 9.55 |
| 1.425 | −1.408 | −0.726 | 0.912 | 0.957 | 1.913 | ||
| LC07 | 135 | −19.33 | −26.45 | −3.87 | 5.16 | −4.69 | 1.94 |
| −1.395 | −1.392 | −0.685 | −0.871 | −0.900 | −0.668 | ||
| LC08 | 135 | −19.33 | −26.45 | −3.87 | 5.16 | −4.69 | 1.94 |
| −1.395 | −1.392 | −0.685 | −0.871 | −0.900 | −0.668 | ||
| LC09 | 135 | −19.33 | −26.45 | −3.87 | 5.16 | −4.69 | 1.94 |
| −1.395 | −1.392 | −0.685 | −0.871 | −0.900 | −0.668 | ||
| LC10 | 45 | 16.34 | −20.33 | −3.85 | 7.24 | 4.89 | 9.55 |
| 1.425 | −1.408 | −0.726 | 0.912 | 0.957 | 1.913 | ||
| LC11 | 45 | 13.70 | −20.73 | −3.79 | 7.12 | −4.96 | 11.98 |
| 1.453 | −1.408 | −0.724 | 0.934 | −1.005 | −2.408 | ||
| LC12 | 315 | 13.20 | 19.39 | −3.23 | −6.42 | −3.75 | −19.80 |
| 1.605 | 1.662 | −0.842 | −1.224 | −1.116 | −9.519 |
| Description | Value (ton) |
|---|---|
| Structure weight | 2316.24 |
| Buoyancy | 9338.12 |
| Permanent ballast | 3085.20 |
| Height above Water Line (m) | Parts | Projection Area (m2) | Height Coef. (Ch) | Wind Force (ton) |
|---|---|---|---|---|
| 0.0~15.3 | Tower | 32.50 | 1.00 | 1.61 |
| Platform | 72.52 | 1.00 | 3.58 | |
| 15.3~30.5 | Tower | 76.16 | 1.10 | 4.14 |
| 30.5~46.0 | Tower | 68.20 | 1.20 | 4.04 |
| 46.0~61.0 | Tower | 66.00 | 1.30 | 4.24 |
| 61.0~76.0 | Tower | 65.16 | 1.37 | 4.41 |
| 76.0~91.5 | Tower | 60.74 | 1.43 | 4.29 |
| 91.5~106.5 | Tower | 19.84 | 1.48 | 1.45 |
| Total | 461.12 | 27.77 | ||
| Type | Breadth of Towed Object (m) | Reflection Coefficient (R) | Significant Wave Height (m) | Wave Force (ton) |
|---|---|---|---|---|
| Spar | 13.00 | 0.88 | 11.117 | 159.41 |
| Type | Projected Area (m2) | Drag Coefficient (Cd) | Current Velocity (m/s) | Current Force (ton) |
|---|---|---|---|---|
| Spar | 1058.48 | 0.62 | 1.63 | 25.366 |
| Load Case | Environment Angle (deg) | Equivalent Stress (MPa) | Allowable Stress (MPa) | Result |
|---|---|---|---|---|
| LC01 | 45 | 217.12 | 253.57 | Satisfied |
| LC02 | 135 | 181.35 | 253.57 | Satisfied |
| LC03 | 315 | 215.38 | 253.57 | Satisfied |
| LC04 | 315 | 214.59 | 253.57 | Satisfied |
| LC05 | 45 | 217.12 | 253.57 | Satisfied |
| LC06 | 45 | 218.08 | 253.57 | Satisfied |
| LC07 | 135 | 182.87 | 253.57 | Satisfied |
| LC08 | 135 | 182.87 | 253.57 | Satisfied |
| LC09 | 135 | 182.87 | 253.57 | Satisfied |
| LC10 | 45 | 218.08 | 253.57 | Satisfied |
| LC11 | 45 | 217.73 | 253.57 | Satisfied |
| LC12 | 315 | 214.79 | 253.57 | Satisfied |
| Bolt Element | Part | Stress (MPa) | Allowable Stress (MPa) |
|---|---|---|---|
| RBE3 | Flange (shell) | 88.9 | 248.25 |
| RBE3 + beam | Flange (shell) | 115.9 | 248.25 |
| solid | Flange (shell) | 140.5 | 248.25 |
| RBE3 | Flange (solid) | 211.0 | 248.25 |
| RBE3 + beam | Flange (solid) | 201.4 | 248.25 |
| solid | Flange (solid) | 179.9 | 248.25 |
| Load Case | Environment Angle (deg) | Equivalent Stress (MPa) | Allowable Stress (MPa) | Result |
|---|---|---|---|---|
| LC01 | 45 | 369.65 | 830.00 | Satisfied |
| LC02 | 135 | 282.27 | 830.00 | Satisfied |
| LC03 | 315 | 362.07 | 830.00 | Satisfied |
| LC04 | 315 | 350.63 | 830.00 | Satisfied |
| LC05 | 45 | 369.65 | 830.00 | Satisfied |
| LC06 | 45 | 386.75 | 830.00 | Satisfied |
| LC07 | 135 | 304.91 | 830.00 | Satisfied |
| LC08 | 135 | 304.91 | 830.00 | Satisfied |
| LC09 | 135 | 304.91 | 830.00 | Satisfied |
| LC10 | 45 | 386.75 | 830.00 | Satisfied |
| LC11 | 45 | 382.94 | 830.00 | Satisfied |
| LC12 | 315 | 354.44 | 830.00 | Satisfied |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, K.; Kim, J.-B.; Yu, Y.; Seo, H.-S. Structural Modeling and Failure Assessment of Spar-Type Substructure for 5 MW Floating Offshore Wind Turbine under Extreme Conditions in the East Sea. Energies 2021, 14, 6571. https://doi.org/10.3390/en14206571
Ha K, Kim J-B, Yu Y, Seo H-S. Structural Modeling and Failure Assessment of Spar-Type Substructure for 5 MW Floating Offshore Wind Turbine under Extreme Conditions in the East Sea. Energies. 2021; 14(20):6571. https://doi.org/10.3390/en14206571
Chicago/Turabian StyleHa, Kwangtae, Jun-Bae Kim, Youngjae Yu, and Hyoung-Seock Seo. 2021. "Structural Modeling and Failure Assessment of Spar-Type Substructure for 5 MW Floating Offshore Wind Turbine under Extreme Conditions in the East Sea" Energies 14, no. 20: 6571. https://doi.org/10.3390/en14206571
APA StyleHa, K., Kim, J. -B., Yu, Y., & Seo, H. -S. (2021). Structural Modeling and Failure Assessment of Spar-Type Substructure for 5 MW Floating Offshore Wind Turbine under Extreme Conditions in the East Sea. Energies, 14(20), 6571. https://doi.org/10.3390/en14206571