
A Review of Transverse Flux Machines Topologies and Design


Abstract
:1. Introduction
- p increases with the number of poles (in any case, the machine diameter can be kept constant or not).
- increases with the flux density (e.g., using rare-earth PMs), the pole area or the number of turns.
- increases with the stator current, thus decreasing the efficiency (torque is linear with current, but Joule losses are quadratic) and increasing the current density (maybe causing cooling problems).
2. Applications
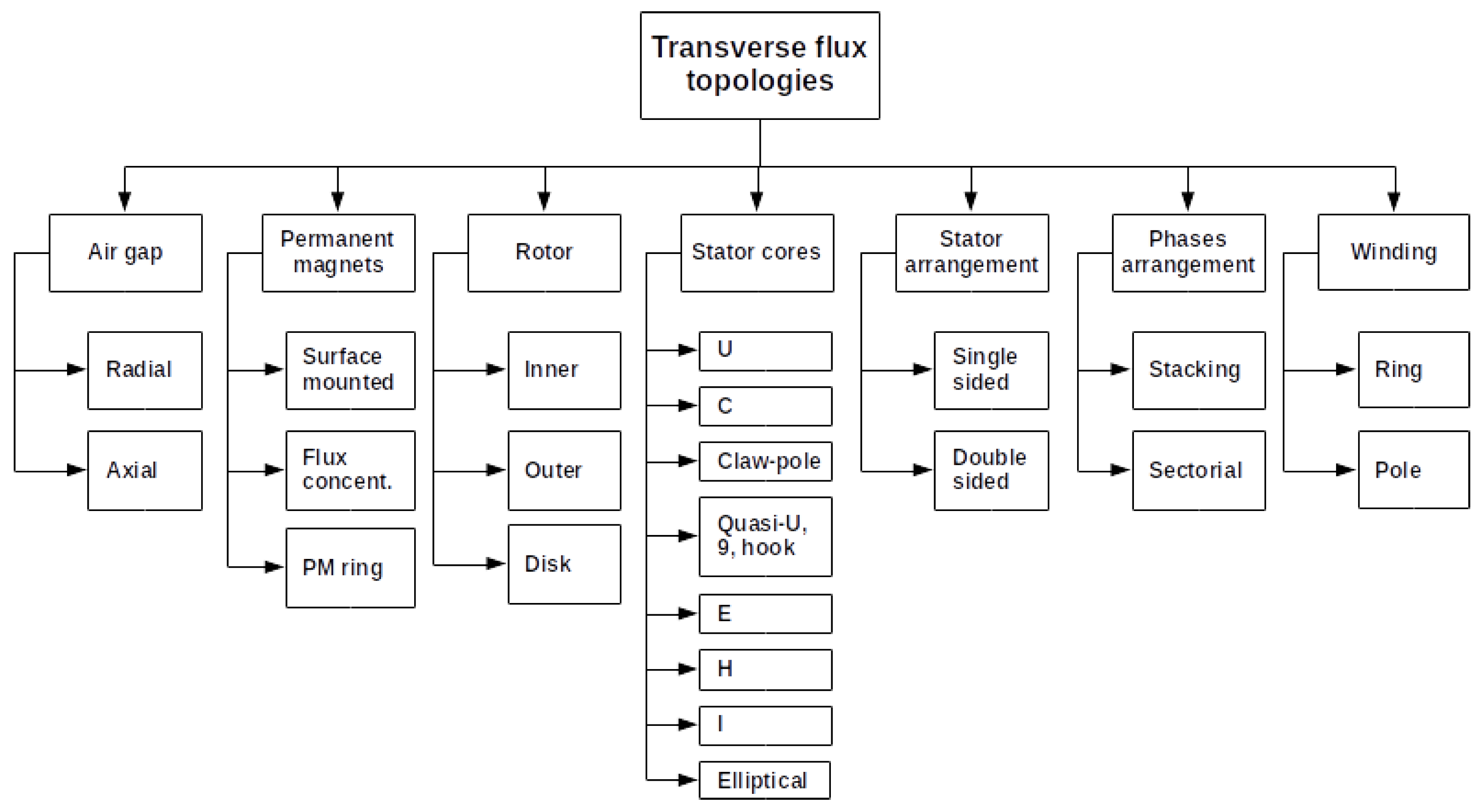
3. Transverse Flux Topologies
3.1. Air Gap (Radial, Axial)
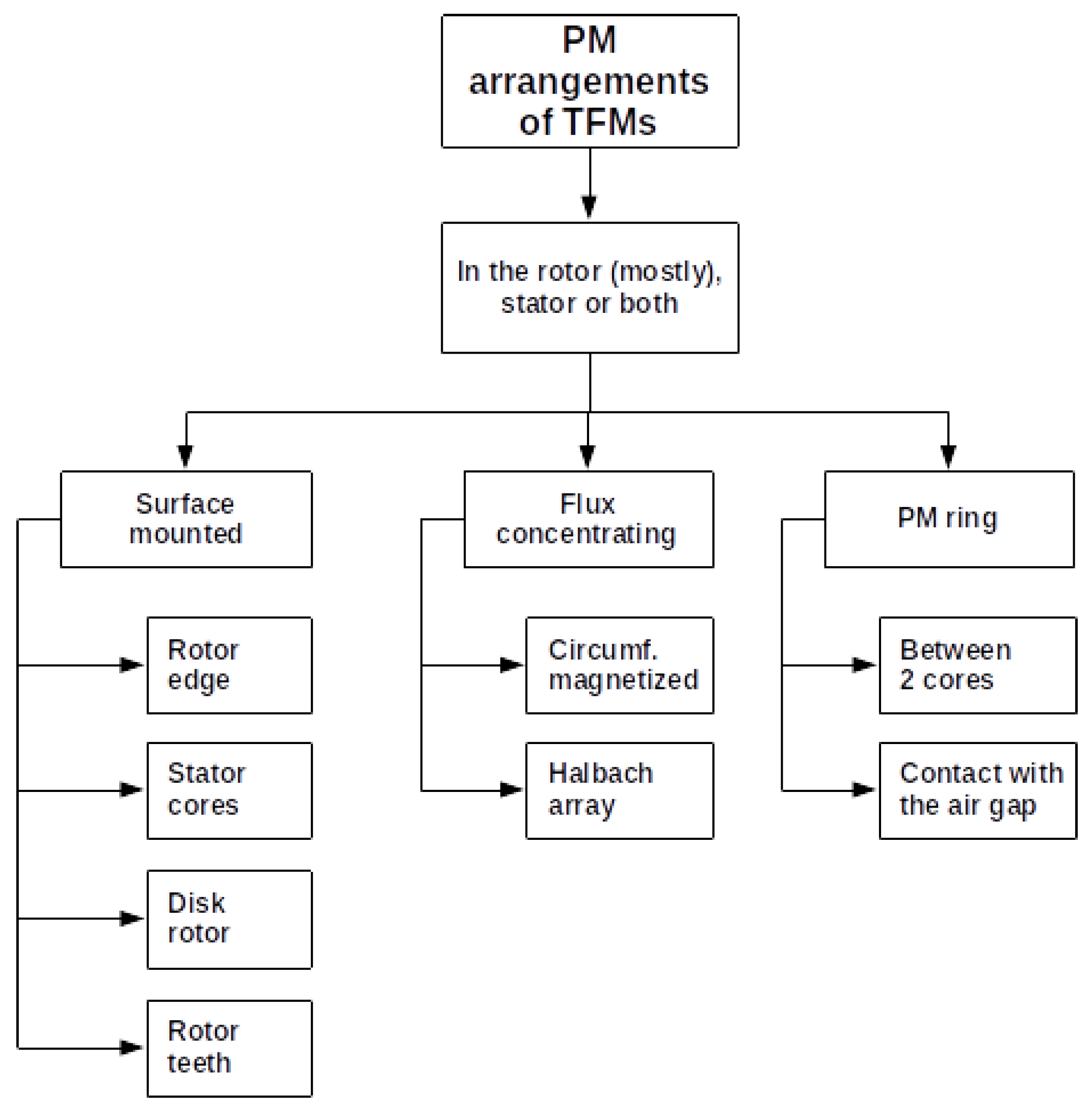
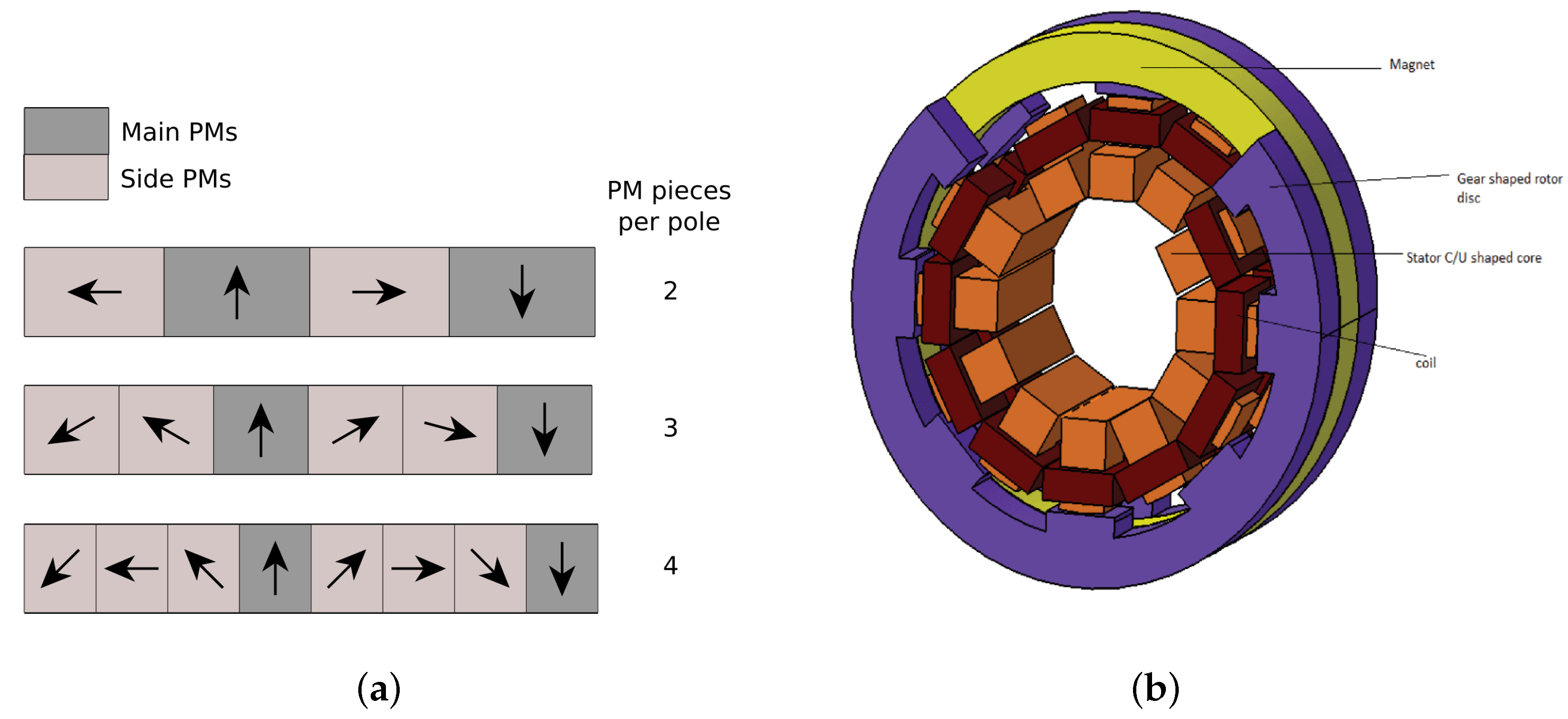
3.2. Permanent Magnets (Surface-Mounted, Flux-Concentrating, PM Ring)
3.3. Rotor (Inner, Outer, Disk)
3.4. Stator Cores
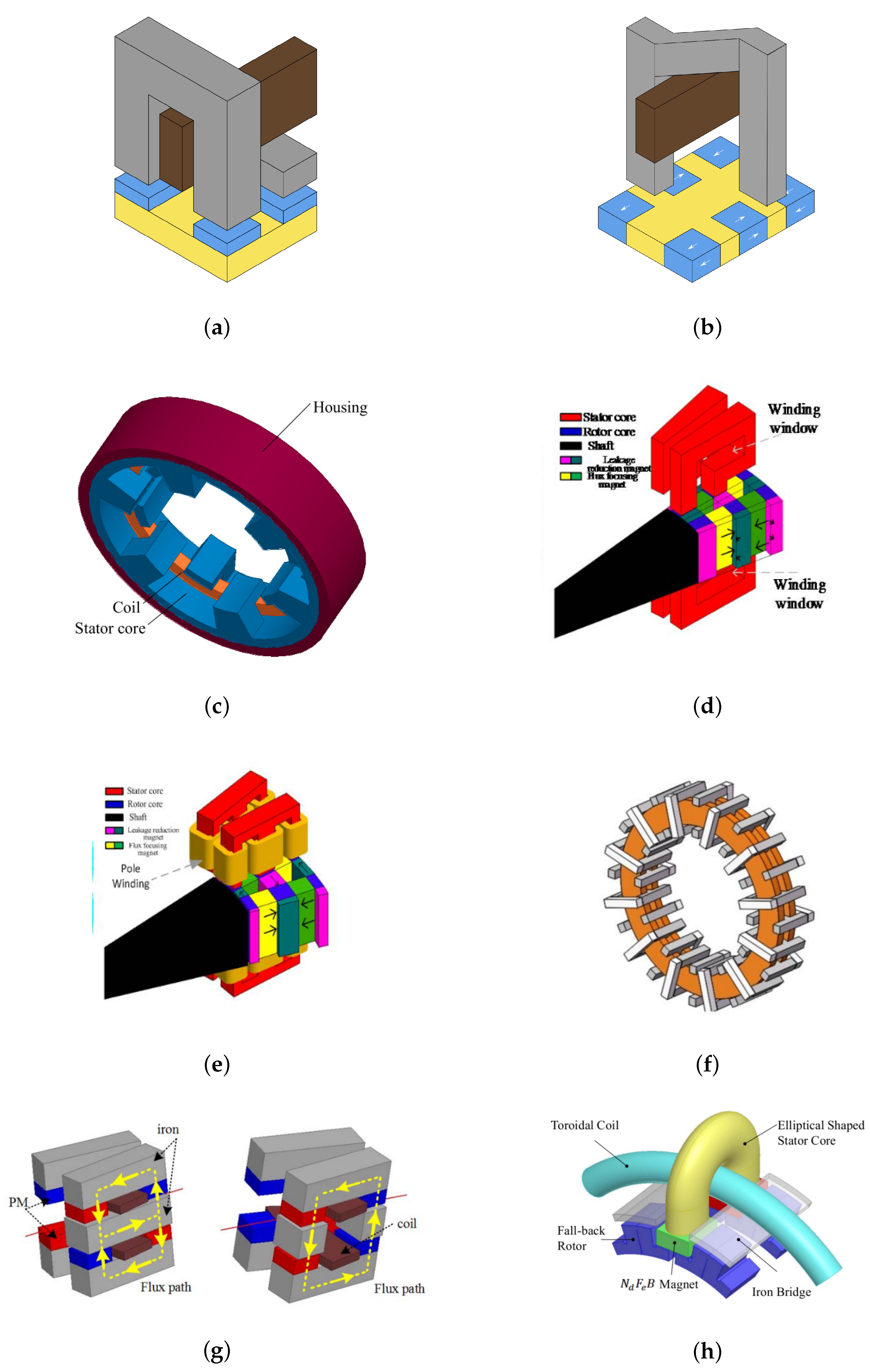
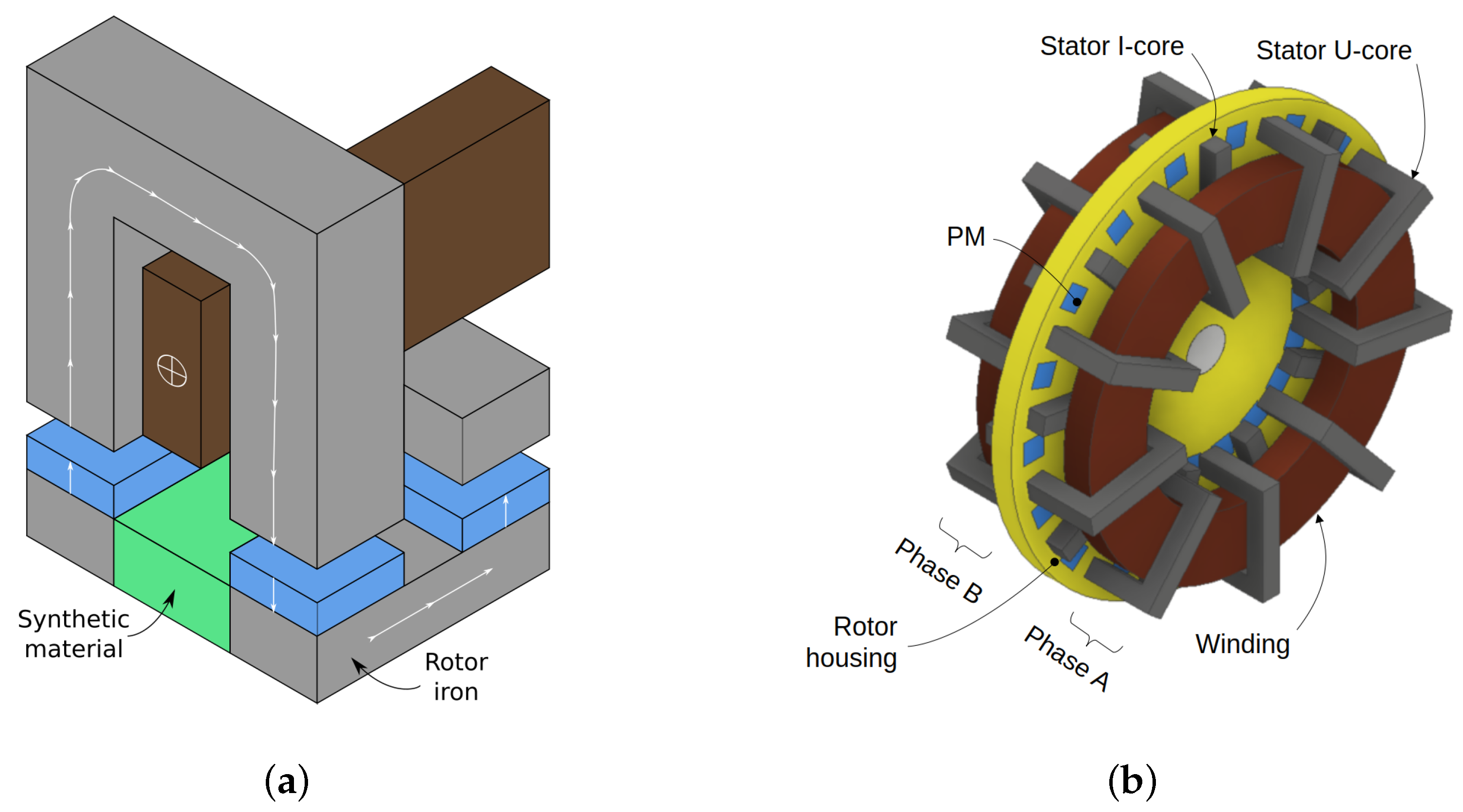
- U-core. This is the basic magnetic core of TFMs, especially of those with surface-mounted PMs (Figure 9a). The circumferential shifting of the U-cores in the rotation plane forms the transverse flux plane of the magnetic flux. Variations of the classic U-cores have been introduced in [17] to explore four-coil arrangements.
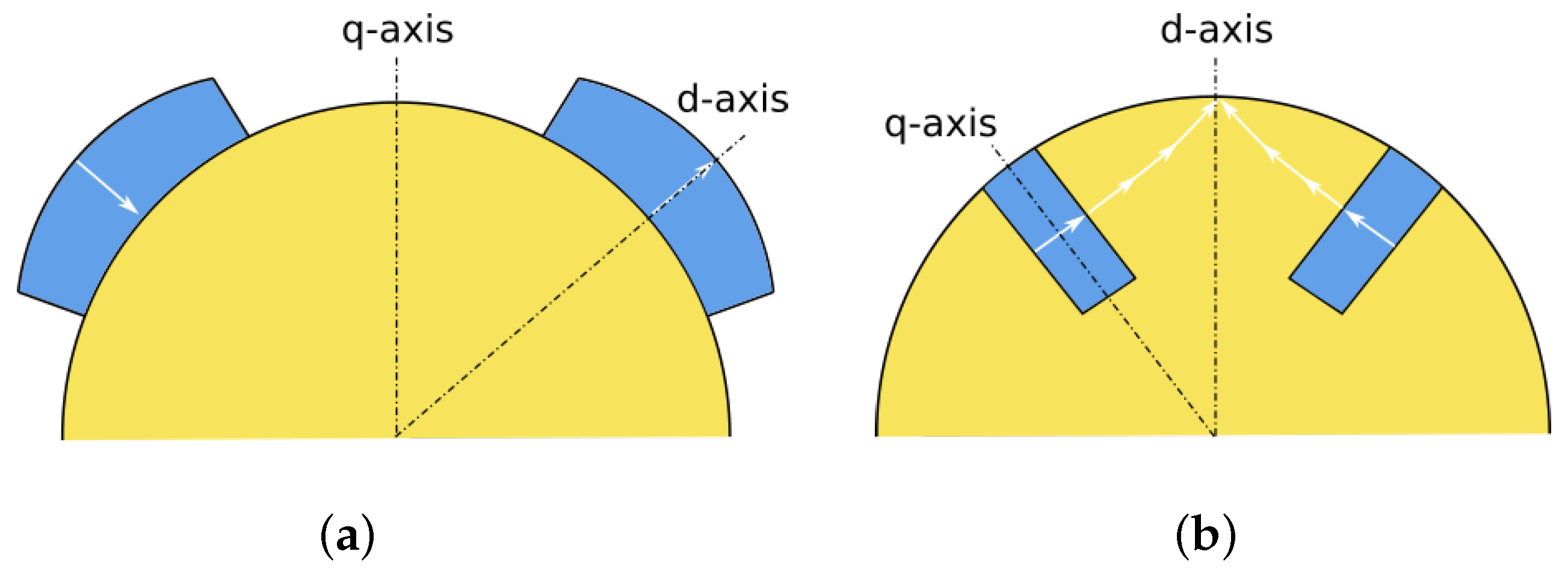
- C-core [19,96,97]. In many publications the name “C-core” is equally used for C- and U-cores due to its similar shape, but in this review, the distinction made in [84] is applied: U-cores guide the magnetic flux in the axial plane of TFMs with surface-mounted PMs (Figure 9a), whereas C-cores guide the flux across a skewed line in TFMs with flux-concentrating PMs (Figure 9b). C-core TFMs benefit from lower losses and higher torque at the cost of a more challenging manufacture [84,97].
- Claw-pole stator [8,16,25,87,95,98,122,123,124] or claw-pole stator and rotor [85,86]. Compared to a radial machine and a mutual flux path TFM with the same volume, the claw-pole TFM offers higher torque densities and its weight is lower. However, if the mass of the magnets is constrained instead of the outer volume, the torque capability of the claw-pole TFM is reduced significantly [25]. The manufacturing process of the claw-pole machine is problematic due to its dependence of SMC [16], but it is easier than other TFMs assembly [87]. Claw-pole machines take the advantage of flux concentration with single sided design, this is preferable to the complex design and manufacturing of conventional double-sided TFMs [99].
- Quasi-U core [15,59,68,114], 9-shaped core [125] and hook-shaped core [67,72]. These three core shapes are very similar, and the same idea has been used in other publications [14,120]. The quasi-U core is basically a modification of the basic U-core to adapt it to an axial-gap, double-sided machine with Halbach array. The same happens with the hook-shaped machine, but it shows a better performance than quasi-U and E-core TFMs in terms of torque density, efficiency and power factor [72]. Ajamloo et al. propose a similar concept [67]. Additionally, 9-shaped cores with rotor teeth improve the single-sided stator space utilization and show greater torque density and lower torque ripple than a conventional TFM [125].
- E-core [59,60,68,91,108,110,115,126]. The E-core boosts torque density and magnet utilization, shortening the flux path with the use of pole windings that are wound across each leg of the E-core [115]. E-cores have also been used with ring windings to obtain a double-sided stator [108,126]. The two “Us” that form the E-core can even have a different cross section to reduce the magnetic leakage between the poles of the inner rotor [126].
3.5. Stator Arrangement (Single-Sided, Double-Sided)
3.6. Phase Arrangement (Stacking, Sectorial)
3.7. Winding (Ring, Pole)
3.8. Some Special Transverse Flux Machines
- In [89], a double rotor transverse flux machine is proposed as a compound-structure machine for hybrid electric vehicles. It has one flux-concentrating PM rotor, one passive TF rotor and a TF stator based on U-cores.
- In [90], a hybrid flux machine is designed, it is named “hybrid” because the magnetic flux in the stator core is transverse, whereas the rotor flux is longitudinal. Its aim is to improve the magnets utilization and power factor, taking advantage of magnetic and electric circuits decoupling and low ohmic losses of TFMs and simple rotor construction, with single magnet layer per stack, and better magnet utilization of longitudinal flux machines. This hybrid flux machine delivers the same torque with 32% reduced magnet in comparison with other TFMs (conventional TFM with and without pole shaping), and also shows a better power factor and torque density with a slightly lower efficiency.
- In [104], a dual-consequent-pole transverse flux machine is designed, which has PMs both on the stator and the rotor. Differently from common TFMs, the flux leakage of inactive magnets does not weaken the total flux, even it enhances it. Great torque per volume is obtained compared to literature.
- In [8], a high-temperature superconducting (HTS) flux-switching transverse flux machine is designed using 3D-FEM and multiobjective optimization. It has two ring-shaped HTS-excitation coils in the stator, and also several concentrating armature windings that are wound around the U-cores.
4. Operation of the Transverse Flux Machine
4.1. Pole Pairs and Size
4.2. Torque, Speed and Efficiency Ratings
4.3. Torque Ripple Minimization
- Even in the sinusoidal case, single-phase torque has a significant torque ripple, whereas 3-phase torque is constant due to the cancellation of three sine waves shifted 120°. The main contribution to the single-phase torque ripple is the synchronous torque.
- The fundamental frequency of the single-phase torque is twice that of the main machine frequency ().
- The average synchronous torque increases with , and . For the case study, only increase the single-phase torque ripple.
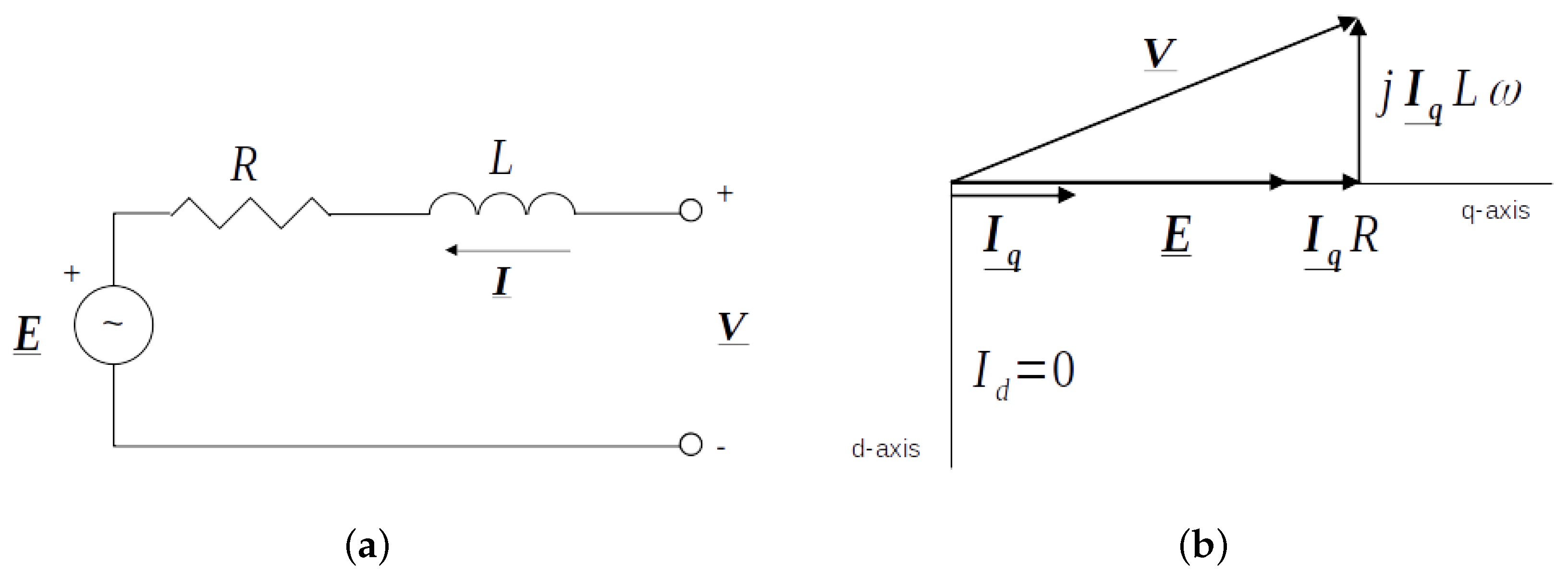
- The reluctance torque is zero because it has been assumed that is constant. This is the case of TFMs with surface-mounted PMs.
- The average value of the cogging torque is zero. The amplitude of the cogging torque increases with rotor current () and the difference between and .
- Trapezoidal inductances, a typical waveform of PMSMs, introduce new harmonics in the single-phase torque and distort the 3-phase torque. The single-phase torque ripple increases significantly.
4.3.1. Changing the Machine Structure
4.3.2. By Control Strategies
4.4. Leakage and Power Factor
4.5. Materials and Manufacturing
4.5.1. Magnetic Cores (Laminated Steel, SMC)
4.5.2. Permanent Magnets (NdFeB, Ferrite)
4.5.3. Rotor and Stator Housings
4.6. Power Converters and Control
4.6.1. Power Converters
4.6.2. Control Strategies
5. Design and Modeling Techniques
5.1. Analytical Methods
5.2. Finite Element Method
5.3. Optimization
5.4. Prototyping
5.5. Mechanical and Thermal Modeling
6. Conclusions
- Different TF topologies have been proposed in the literature, and there is a wide range of potential applications for rotational, linear and tubular TFMs. However, it is not clear which factors lead to a better TFM topology in terms of performance (cogging torque, efficiency, power factor, etc.) and cost. Further research should be conducted on TFMs comparison.
- TFMs potential versus RFMs and AFMs has been validated only through computational models and a few prototypes. Manufacturing issues and cost of TFMs should be analyzed and quantified more precisely to open up TFMs large-scale manufacturing.
- Usually, TFM models from the literature are isolated from other upstream and downstream devices. Few power converters and control techniques have been studied in the field of TFMs. More system-level integration of TFMs, particularized for each application, is required.
- Further discussion about the effectiveness of cogging torque and power factor improvement techniques should be done by comparing them.
- The analysis of TFMs using MECs is currently limited to each TFM design. A generalization of MECs would be useful to obtain a simple method with accurate results compared to FEM and prototypes.
- More mechanical- and thermal-coupled FEM simulations should be done to give a deeper insight into TFMs noise, vibrations and heat transfer.
Author Contributions
Funding
Conflicts of Interest
References
- Husain, T.; Hasan, I.; Sozer, Y.; Husain, I.; Muljadi, E. A comprehensive review of permanent magnet transverse flux machines for direct drive applications. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 1255–1262. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L. Reluctance Electric Machines: Design and Control; CRC Press: Boca Raton, FL, USA, 2018; 432p. [Google Scholar] [CrossRef]
- Wu, F.; El-Refaie, A.M. Permanent magnet vernier machine: A review. IET Electr. Power Appl. 2019, 13, 127–137. [Google Scholar] [CrossRef]
- Li, R.; Qu, R.; Li, D.; Gao, Y.; Shi, C. A novel modular transverse flux linear permanent magnet vernier machine with halbach arrays and consequent poles. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition, ECCE 2019, Baltimore, MD, USA, 29 September–3 October 2019; pp. 3033–3037. [Google Scholar] [CrossRef]
- Liu, C.; Ma, B.; Lei, G.; Guo, Y.; Wang, Y.; Zhu, J. Development of a new low cost transverse flux-flux switching permanent magnet machine with soft magnetic composite cores and ferrite magnets. In Proceedings of the 2017 IEEE International Magnetics Conference (INTERMAG), Dublin, Ireland, 24–28 April 2017. [Google Scholar] [CrossRef]
- Wan, Z.; Husain, I. Design, analysis and prototyping of a flux switching transverse flux machine with ferrite magnets. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 1227–1233. [Google Scholar] [CrossRef]
- Wan, Z.; Husain, I. Design of a flux switching transverse flux machine based on generalized inductance analysis. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference, IEMDC 2017, Miami, FL, USA, 21–24 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ma, W.; Shen, F.; Li, X.; Wang, Y. A Novel HTS Flux-Switching Transverse-Flux Machine with Partitioned Stator. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Zhao, M.; Wei, Y.; Yang, H.; Xu, M.; Han, F.; Deng, G.; Hou, D.; Zhang, P. Development and Analysis of Novel Flux-Switching Transverse-Flux Permanent Magnet Linear Machine. IEEE Trans. Ind. Electron. 2019, 66, 4923–4933. [Google Scholar] [CrossRef]
- Zhang, Z.; Tang, X.; Zhang, C.; Li, M. Comparative Study on Modular Longitudinal and Transverse Flux-Switching Permanent Magnet Linear Motor. IEEE Trans. Energy Convers. 2020, 35, 33–42. [Google Scholar] [CrossRef]
- Dong, D.; Huang, W.; Bu, F.; Wang, Q.; Jiang, W.; Lin, X. Modeling and static analysis of primary consequent-pole tubular transverse-flux flux-reversal linear machine. Energies 2017, 10, 1479. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Huang, W.; Dong, D. Force ripples suppression of tubular transverse flux and flux reversal linear permanent magnet motor based on ADRC. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems, ICEMS 2017, Sydney, NSW, Australia, 11–14 August 2017. [Google Scholar] [CrossRef]
- Zhu, S.; Cox, T.; Gerada, C. Comparative study of novel tubular flux-Reversal transverse flux permanent magnet linear machine. In Proceedings of the 2017 IEEE Energy Conversion Congresaas and Exposition, ECCE 2017, Cincinnati, OH, USA, 1–5 October 2017; pp. 4282–4287. [Google Scholar] [CrossRef]
- Ahmed, A.; Husain, I. Power Factor Improvement of a Transverse Flux Machine with High Torque Density. IEEE Trans. Ind. Appl. 2018, 54, 4297–4305. [Google Scholar] [CrossRef]
- Husain, T.; Hasan, I.; Sozer, Y.; Husain, I.; Muljadi, E. Design Considerations of a Transverse Flux Machine for Direct-Drive Wind Turbine Applications. IEEE Trans. Ind. Appl. 2018, 54, 3604–3615. [Google Scholar] [CrossRef]
- Liu, C.; Lu, J.; Wang, Y.; Lei, G.; Zhu, J.; Guo, Y. Design Issues for claw pole machines with soft magnetic composite cores. Energies 2018, 11, 1998. [Google Scholar] [CrossRef] [Green Version]
- Masliennikov, A.; Yehorov, A.; Duniev, O.; Leidhold, R.; Stamann, M.; Hieke, S. The magnetic system analysis of the transverse flux machine and its improvement. In Proceedings of the 2019 IEEE 2nd Ukraine Conference on Electrical and Computer Engineering, UKRCON 2019, Lviv, Ukraine, 2–6 July 2019; pp. 552–555. [Google Scholar] [CrossRef]
- Kumar, R.; Zhu, Z.Q.; Duke, A.; Thomas, A.; Clark, R.; Azar, Z.; Wu, Z.Y. A Review on Transverse Flux Permanent Magnet Machines for Wind Power Applications. IEEE Access 2020, 8, 216543–216565. [Google Scholar] [CrossRef]
- Taravat, S.; Kiyoumarsi, A.; Bracikowski, N. Mitigation of cogging torque in transverse-flux permanent-magnet machines with flux concentrators by step skewing of stator pole. IET Electr. Power Appl. 2020, 14, 2378–2388. [Google Scholar] [CrossRef]
- Tuncel, E.; Yildiriz, E. Comparative review of disk type and unconventional transverse flux machines: Performance analysis. Turk. J. Electr. Eng. Comput. Sci. 2021, 29, 2029–2045. [Google Scholar] [CrossRef]
- Laithwaite, E.R.; Eastham, J.F.; Bolton, H.R.; Fellows, T.G. Linear Motors with Transverse Flux. Proc. Inst. Electr. Eng. 1971, 118, 1761–1767. [Google Scholar] [CrossRef]
- Weh, H.; May, W. Achievable force densities for permanent magnet excited machines in new configurations. In Proceedings of the International Conference on Electrical Machines, Munich, Germany, 8–10 September 1986; pp. 1107–1111. [Google Scholar]
- Anglada, J.R.; Sharkh, S.M. An Insight into Torque Production and Power Factor in Transverse-Flux Machines. IEEE Trans. Ind. Appl. 2017, 53, 1971–1977. [Google Scholar] [CrossRef]
- Huang, S.; Luo, J.; Lipo, T.A. Analysis and Evaluation of the Transverse Flux Circumferential Current Machine. In Proceedings of the IAS ’97. Conference Record of the 1997 IEEE Industry Applications Conference Thirty-Second IAS Annual, New Orleans, LA, USA, 5–9 October 1997. [Google Scholar]
- Martinez Ocaña, I.; Baker, N.J.; Mecrow, B.C.; Hilton, C.; Brockway, S. Transverse flux machines as an alternative to radial flux machines in an in wheel motor. J. Eng. 2019, 2019, 3624–3628. [Google Scholar] [CrossRef]
- Hernández-Rodríguez, M.A.; Iracheta-Cortez, R.; Gómez-Torres, R.; Flores-Guzmán, N.; Durante-Gómez, W.; Hernández-Mayoral, E. Designing a transverse flux PMSG with analytical methods for applications in wind turbines. In Proceedings of the 2018 IEEE 38th Central America and Panama Convention, CONCAPAN 2018, San Salvador, El Salvador, 7–9 November 2018. [Google Scholar] [CrossRef]
- Dobzhanskyi, O.; Gouws, R.; Amiri, E. Design Considerations of the PM Transverse Flux Linear Motor for an Urban-Type Electromagnetic Train. In Proceedings of the 2018 IEEE Transportation and Electrification Conference and Expo, ITEC 2018, Long Beach, CA, USA, 13–15 June 2018; pp. 168–172. [Google Scholar] [CrossRef]
- Jeong, S.I. Design of linear transverse flux machine for stelzer machine using equivalent magnet circuit and FEM. J. Electr. Eng. Technol. 2018, 13, 1595–1602. [Google Scholar] [CrossRef]
- Khaled, U.; Meer, R.; Beroual, A. A Novel Design of Three-Phase Transverse Flux Linear Motor to Minimize Force Ripples. Arab. J. Sci. Eng. 2018, 43, 2853–2858. [Google Scholar] [CrossRef]
- Ahmadi, S.; Mirsalim, M. A Novel Quad-Leg Transverse-Flux Permanent Magnet Linear Motor for 3-D Printer Applications. In Proceedings of the 2019 10th International Power Electronics, Drive Systems and Technologies Conference, PEDSTC 2019, Shiraz, Iran, 12–14 February 2019; pp. 67–71. [Google Scholar] [CrossRef]
- Ahmed, S.; Koseki, T.; Norizuki, K.; Aoyama, Y. Rapid co-kriging based multi-fidelity surrogate assisted performance optimization of a transverse flux PMLSM. In Proceedings of the 2019 12th International Symposium on Linear Drives for Industry Applications, LDIA 2019, Neuchatel, Switzerland, 1–3 July 2019. [Google Scholar] [CrossRef]
- Do, N.N.; Taberner, A.J.; Ruddy, B.P. Design of a linear permanent magnet transverse flux motor for needle-free jet injection. In Proceedings of the 2019 12th International Symposium on Linear Drives for Industry Applications, LDIA 2019, Neuchatel, Switzerland, 1–3 July 2019. [Google Scholar] [CrossRef]
- Dobzhanskyi, O. Comparison analysis of cylindrical and rectangular linear permanent magnet transverse-flux machines for wave energy applications. In Proceedings of the 2019 12th International Symposium on Linear Drives for Industry Applications, LDIA 2019, Neuchatel, Switzerland, 1–3 July 2019. [Google Scholar] [CrossRef]
- Jia, Z.; Wu, L.; Chen, W.; Yu, L.; Cao, Y.; Jia, H. Optimization of transverse flux permanent magnet machine with double omega-hoop stator. In Proceedings of the 2019 IEEE International Electric Machines and Drives Conference, IEMDC 2019, San Diego, CA, USA, 12–15 May 2019; pp. 1925–1928. [Google Scholar] [CrossRef]
- Luo, J.; Kou, B.; Yang, X.; Zhang, L.; Zhang, H. Modelling of a Dual-side Excited Transverse Flux Permanent Magnet Linear Motor. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems, ICEMS 2019, Harbin, China, 11–14 August 2019. [Google Scholar] [CrossRef]
- Yu, S.; Zhao, M.; Zhao, B.; Liu, J.; Feng, N. Equivalent magnetic circuit analysis for linear transverse flux permanent magnet machine. In Proceedings of the 1st IEEE Student Conference on Electric Machines and Systems, SCEMS 2018, Huzhou, China, 14–16 December 2019; pp. 2–6. [Google Scholar] [CrossRef]
- Zhao, M.; Wei, Y.; Yu, S.; Yang, H.; Feng, N.; Xu, M.; Hou, D.; Zou, J. Development and Analysis of a Novel Transverse Flux Permanent Magnet Linear Motor with the Concentrated Flux Mover. IEEE Trans. Appl. Supercond. 2019, 29, 1–6. [Google Scholar] [CrossRef]
- Ahmed, S.; Grabher, C.; Kim, H.J.; Koseki, T. Multifidelity Surrogate Assisted Rapid Design of Transverse-Flux Permanent Magnet Linear Synchronous Motor. IEEE Trans. Ind. Electron. 2020, 67, 7280–7289. [Google Scholar] [CrossRef]
- Fu, D.; Gong, J.; Xu, Y.; Gillon, F.; Bracikowski, N. Coupled Circuit and Magnetic Model for a Transverse Flux Permanent Magnet Linear Motor. IEEE Access 2020, 8, 159274–159283. [Google Scholar] [CrossRef]
- Ulbrich, J.; Behrens, S.; Raffel, H.; Orlik, B. Six phase linear drive based on new transverse flux linear machines. In Proceedings of the 2020 International Conference on Electrical Machines, ICEM 2020, Gothenburg, Sweden, 23–26 August 2020; pp. 728–734. [Google Scholar] [CrossRef]
- Luo, J.; Kou, B.; Yang, X.; Zhang, H.; Zhang, L. Development, Design, and Analysis of a Dual-Consequent-Pole Transverse Flux Linear Machine for Direct-Drive Applications. IEEE Trans. Ind. Electron. 2021, 68, 6097–6108. [Google Scholar] [CrossRef]
- Zhu, S.; Cox, T.; Gerada, C.; Xu, Z. Comparative study and optimal design of alternative PM configuration transverse flux linear machine. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; pp. 7–12. [Google Scholar] [CrossRef]
- Shuail, Y.; Zhao, M.; Yang, H.; Feng, N.; Ho, D.; Zou, J. Design and reduction of thrust ripple in transverse flux permanent magnet linear machine. In Proceedings of the 2018 IEEE International Magnetic Conference, INTERMAG 2018, Tainan, Taiwan, 1–5 August 2018. [Google Scholar] [CrossRef]
- Wang, J.; Baker, N.J. A Linear Laminated Cylindrical Transverse Flux Machine for Use with a Free Piston Engine. IEEE Trans. Energy Convers. 2018, 33, 1988–1997. [Google Scholar] [CrossRef] [Green Version]
- Baker, N.; Sa Jalal, A.; Wang, J.; Korbekandi, R.M. Experimental comparison of two linear machines developed for the free piston engine. J. Eng. 2019, 2019, 4406–4410. [Google Scholar] [CrossRef]
- Chen, H.; Nie, R.; Wang, H. A Transverse Flux Single-Phase Tubular-Switched Reluctance Linear Launcher with Eight-Pole Structure. IEEE Trans. Plasma Sci. 2019, 47, 2331–2338. [Google Scholar] [CrossRef]
- Chen, H.; Nie, R.; Zhao, W. A Novel Tubular Switched Reluctance Linear Launcher with a Module Stator. IEEE Trans. Plasma Sci. 2019, 47, 2539–2544. [Google Scholar] [CrossRef]
- Sui, Y.; Yin, Z.; Wang, M.; Yu, B.; Zheng, P. A Tubular Staggered-Teeth Transverse-Flux PMLM with Circumferentially Distributed Three-Phase Windings. IEEE Trans. Ind. Electron. 2019, 66, 4837–4848. [Google Scholar] [CrossRef]
- Wang, J.; Baker, N.; Gavrilov, B. Study of the assembly, build and test of a linear transverse flux machine. J. Eng. 2019, 2019, 4293–4297. [Google Scholar] [CrossRef]
- Zhao, X.; Niu, S. Development of a Novel Transverse Flux Tubular Linear Machine With Parallel and Complementary PM Magnetic Circuit for Precision Industrial Processing. IEEE Trans. Ind. Electron. 2019, 66, 4945–4955. [Google Scholar] [CrossRef]
- Chen, H.; Nie, R.; Zhao, W.; Liu, J. A novel three-phase tubular switched reluctance linear machine with transverse-flux path. IEEE Trans. Appl. Supercond. 2020, 30, 1–6. [Google Scholar] [CrossRef]
- Chen, M.; Huang, L.; Tan, P.; Li, Y.; Ahmad, G.; Hu, M. A stator-PM transverse flux permanent magnet linear generator for direct drive wave energy converter. IEEE Access 2021, 9, 9949–9957. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, X.; Niu, S.; Fu, W.N. Analysis and Design of a New Relieving-DC-Saturation Transverse-Flux Tubular Motor with Complementary Magnetic Circuit. IEEE Trans. Magn. 2021, 57, 1–5. [Google Scholar] [CrossRef]
- Li, X.; Wang, X.; Yu, S. Design and Analysis of a Novel Transverse-Flux Tubular Linear Switched Reluctance Machine for Minimizing Force Ripple. IEEE Trans. Transp. Electrif. 2021, 7, 741–753. [Google Scholar] [CrossRef]
- SERVAX. TFM—Transversal Flux Motors. Available online: https://www.servax.com/en/55/technology/psm—permanent-magnet-synchronous-motors/tfm—transversal-flux-motors.html (accessed on 15 October 2021).
- GKN. Small but Mighty: How Compact TFM e-Motors Deliver in Performance. Available online: https://www.gknpm.com/en/innovation/electrification/soft-magnetic-composites/tfm-case-study/ (accessed on 15 October 2021).
- Powder Metallurgy Review. SMC Cores in Honda’s Prototype Transverse Flux Motor for Hybrid Powertrains. 2013. Available online: https://www.pm-review.com/smc-cores-in-hondas-prototype-transverse-flux-motor-for-hybrid-powertrains/ (accessed on 16 October 2021).
- Arshad, W.M.; Backstrom, T.; Sadarangani, C. Analytical Design and Analysis Procedure for a Transverse Flux Machine. In Proceedings of the Electric Machines and Drives Conference, Cambridge, MA, USA, 17–20 June 2001; pp. 115–121. [Google Scholar] [CrossRef]
- Hasan, I.; Husain, T.; Sozer, Y.; Husain, I.; Muljadi, E. Mechanical and thermal performance of transverse flux machines. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition, ECCE 2017, Cincinnati, OH, USA, 1–5 October 2017; pp. 1205–1211. [Google Scholar] [CrossRef]
- Hasan, I.; Husain, T.; Sozer, Y.; Husain, I.; Muljadi, E. Analytical modeling of a double-sided flux concentrating E-Core Transverse Flux Machine with pole windings. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference, IEMDC 2017, Miami, FL, USA, 21–24 May 2017. [Google Scholar] [CrossRef]
- Noroozi, M.A.; Milimonfared, J.; Taghavi, S. Passive-rotor disk-shaped transverse flux permanent magnet machine with reduced cogging torque. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 2116–2120. [Google Scholar] [CrossRef]
- Patel, M.A.; Vora, S.C. Analysis of a Fall-Back Transverse-Flux Permanent-Magnet Generator. IEEE Trans. Magn. 2017, 53, 1–5. [Google Scholar] [CrossRef]
- Andonie, O.F.; Tutelea, L.N.; Popa, A.; Boldea, I. Improved Transverse Flux Directly - Driven Wind PM Generator: Optimal Design with Key FEM Validation. In Proceedings of the 2018 23rd International Conference on Electrical Machines, ICEM 2018, Alexandroupoli, Greece, 3–6 September 2018; pp. 773–778. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Ghaheri, A.; Abbaszadeh, K. Cogging Torque Reduction in U-Core TFPM Generator Using Different Halbach-Array Structures. In Proceedings of the SPEEDAM 2018—International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Amalfi, Italy, 20–22 June 2018; pp. 1153–1158. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Ajamloo, A.M.; Abbaszadeh, K. Proposing the Output Equations and 3-D MEC Modeling for U -Core TFPM Generators. In Proceedings of the SPEEDAM 2018—International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Amalfi, Italy, 20–22 June 2018; pp. 292–297. [Google Scholar] [CrossRef]
- Peng, G.; Wei, J.; Shi, Y.; Shao, Z.; Jian, L. A novel transverse flux permanent magnet disk wind power generator with H-shaped stator cores. Energies 2018, 11, 810. [Google Scholar] [CrossRef] [Green Version]
- Ajamloo, A.M.; Ghaheri, A.; Nasiri-Zarandi, R. Design and Optimization of a New TFPM Generator with Improved Torque Profile. In Proceedings of the 34th International Power System Conference, PSC 2019, Tehran, Iran, 9–11 December 2019; pp. 106–112. [Google Scholar] [CrossRef]
- Hasan, I.; Husain, T.; Sozer, Y.; Husain, I.; Muljadi, E. Mechanical performance of transverse flux machines. IEEE Trans. Ind. Appl. 2019, 55, 3716–3724. [Google Scholar] [CrossRef]
- Husain, T.; Hasan, I.; Sozer, Y.; Husain, I.; Muljadi, E. Cogging torque minimization in transverse flux machines. IEEE Trans. Ind. Appl. 2019, 55, 385–397. [Google Scholar] [CrossRef]
- Pourmoosa, A.A.; Mirsalim, M. A Transverse Flux Generator With a Single Row of Permanent Magnets: Analytical Design and Performance Evaluation. IEEE Trans. Ind. Electron. 2019, 66, 152–161. [Google Scholar] [CrossRef]
- Behrens, S.; Groke, H.; Ulbrich, J.; Orlik, B. Dynamic compensation control with adaptive parameter correction for transverse flux machines. In Proceedings of the 2020 International Conference on Electrical Machines, ICEM 2020, Gothenburg, Sweden, 23–26 August 2020; pp. 680–686. [Google Scholar] [CrossRef]
- Chowdhury, A.; Sozer, Y. Design and Analysis of a Hook Shaped Stator Core with Ring Winding Transverse Flux Machine for Wind Turbine Applications. In Proceedings of the ECCE 2020—IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020; pp. 540–544. [Google Scholar] [CrossRef]
- Kumar, R.; Zhu, Z.Q.; Duke, A.; Thomas, A.; Clark, R. Influence of air gap in transverse flux permanent magnet machines for wind power applications. In Proceedings of the 2020 International Conference on Electrical Machines, ICEM 2020, Gothenburg, Sweden, 23–26 August 2020; pp. 1917–1922. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Ghaheri, A.; Abbaszadeh, K. Thermal Modeling and Analysis of a Novel Transverse Flux HAPM Generator for Small-Scale Wind Turbine Application. IEEE Trans. Energy Convers. 2020, 35, 445–453. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Ajamloo, A.M.; Abbaszadeh, K. Design Optimization of a Transverse Flux Halbach-Array PM Generator for Direct Drive Wind Turbines. IEEE Trans. Energy Convers. 2020, 35, 1485–1493. [Google Scholar] [CrossRef]
- Noroozi, M.A.; Milimonfared, J.; Yazdanpanah, R. Novel Double-Sided Disk-Shaped Passive-Rotor Transverse-Flux Permanent Magnet Generators for Wind Turbine Applications. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference, PEDSTC 2020, Tehran, Iran, 4–6 February 2020; pp. 11–14. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Mohammadi Ajamloo, A.; Abbaszadeh, K. Cogging torque minimization in transverse flux permanent magnet generators using two-step axial permanent magnet segmentation for direct drive wind turbine application. Int. J. Eng. Trans. A Basics 2021, 34, 908–918. [Google Scholar] [CrossRef]
- Anglada, J.R.; Sharkh, S.M. Analytical calculation of the torque produced by transverse flux machines. IET Electr. Power Appl. 2017, 11, 1298–1305. [Google Scholar] [CrossRef] [Green Version]
- Anglada, J.R.; Sharkh, S.M. Analysis of Transverse Flux Machines Using a Virtual Mutual Inductance Approach. IEEE Trans. Energy Convers. 2018, 33, 465–472. [Google Scholar] [CrossRef]
- Anglada, J.R.; Sharkh, S.M.; Yuratich, M.A. Design Guidelines for a Direct Drive Transverse- flux Tidal Power Generator. In Proceedings of the 2018 23rd International Conference on Electrical Machines, ICEM 2018, Alexandroupoli, Greece, 3–6 September 2018; pp. 2085–2091. [Google Scholar] [CrossRef]
- Hieke, S.; Stamann, M.; Lagunov, D.; Leidhold, R.; Masliennikov, A.; Duniev, A.; Yehorov, A. Two-phase transverse flux machine with disc rotor for high torque low speed Application. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications, EPE 2017 ECCE Europe, Warsaw, Poland, 11–14 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Henneberger, G.; Bork, M. Development of a new transverse flux motor. In Proceedings of the IEE Colloquium on New Topologies for Permanent Magnet Machines (Digest No: 1997/090), London, UK, 18 June 1997; pp. 1/1–1/6. [Google Scholar] [CrossRef]
- Mitcham, A.J. Transverse flux motors for electric propulsion of ships. IEE Colloq. Dig. 1997. [Google Scholar] [CrossRef]
- Masmoudi, A.; Elantably, A. An approach to sizing high power density TFPM intended for hybrid bus electric propulsion. Electr. Mach. Power Syst. 2000, 28, 341–354. [Google Scholar] [CrossRef]
- Lundmark, S.T.; Fard, P.R. Two-Dimensional and Three-Dimensional Core and Magnet Loss Modeling in a Radial Flux and a Transverse Flux PM Traction Motor. IEEE Trans. Ind. Appl. 2017, 53, 2028–2039. [Google Scholar] [CrossRef]
- Lundmark, S.T.; Acquaviva, A.; Bergqvist, A. Coupled 3-D Thermal and Electromagnetic Modelling of a Liquid-cooled Transverse Flux Traction Motor. In Proceedings of the 2018 23rd International Conference on Electrical Machines, ICEM 2018, Alexandroupoli, Greece, 3–6 September 2018; pp. 2640–2646. [Google Scholar] [CrossRef]
- Njeh, A.; Trabelsi, H. New design of the claw-pole transverse flux permanent magnet machine. In Proceedings of the 2018 15th International Multi-Conference on Systems, Signals and Devices, SSD 2018, Yasmine Hammamet, Tunisia, 19–22 March 2018; pp. 1311–1316. [Google Scholar] [CrossRef]
- Pei, X.; Zhou, Y.; Wang, N. A Gaussian process regression based on variable parameters fuzzy dominance genetic algorithm for B-TFPMM torque estimation. Neurocomputing 2019, 335, 153–169. [Google Scholar] [CrossRef]
- Wang, M.; Zheng, P.; Tong, C.; Zhao, Q.; Qiao, G. Research on a Transverse-Flux Brushless Double-Rotor Machine for Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2019, 66, 1032–1043. [Google Scholar] [CrossRef]
- Boomiraja, B.; Kanagaraj, R. A novel hybrid flux machine with transverse flux stator and longitudinal flux rotor: Design and comparative analysis. Electr. Eng. 2020, 102, 1413–1422. [Google Scholar] [CrossRef]
- Chowdhury, A.; Das, S.; Tsuda, T.; Saito, N.; Saha, S.; Sozer, Y. Design and Analysis of a High Saliency Transverse Flux Machine with a Novel Rotor Structure for Traction Applications. In Proceedings of the ECCE 2020—IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020; pp. 1743–1748. [Google Scholar] [CrossRef]
- Pei, X.; Zhou, Y.; Wang, N. Torque Ripple Suppression of Building-Block Transverse Flux Permanent Magnet Motor by Current Compensation and Variable Parameter Control Based on Real-Time Inductance. IEEE Access 2020, 8, 11405–11415. [Google Scholar] [CrossRef]
- Ballestín-Bernad, V.; Artal-Sevil, J.S.; Domínguez-Navarro, J.A. Analytical Optimal Design of a Two-Phase Axial-Gap Transverse Flux Motor. Energies 2021, 14, 3666. [Google Scholar] [CrossRef]
- Babazadeh, A.; Parspour, N.; Hanifi, A. Transverse flux machine for direct drive robots: Modelling and analysis. In Proceedings of the 2004 IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 1–3 December 2004; pp. 376–380. [Google Scholar] [CrossRef]
- Keller, M.; Parspour, N. Experimental identification and validation of model parameters of a permanent magnetic excited transverse flux machine for robotic applications. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering, CPE-POWERENG 2017, Cadiz, Spain, 4–6 April 2017; pp. 352–357. [Google Scholar] [CrossRef]
- Jordan, S.; Baker, N.J. Comparison of two transverse flux machines for an aerospace application. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference, IEMDC 2017, Miami, FL, USA, 21–24 May 2017. [Google Scholar] [CrossRef] [Green Version]
- Baker, N.J.; Jordan, S. Comparison of Two Transverse Flux Machines for an Aerospace Application. IEEE Trans. Ind. Appl. 2018, 54, 5783–5790. [Google Scholar] [CrossRef]
- Kulan, M.C.; Baker, N.J.; Turvey, S. Manufacturing challenges of a modular transverse flux alternator for aerospace. Energies 2020, 13, 4275. [Google Scholar] [CrossRef]
- Ravichandran, M.H.; Murali, V.; Vt, S.A.; Joseph, C.C. A Comprehensive Study on Transverse Flux Motor for Direct Drive Low-Speed Spacecraft Applications. IEEE Trans. Ind. Electron. 2021, 68, 412–422. [Google Scholar] [CrossRef]
- Hui, J.; Gao, M.; Wang, Y. Design and optimisation of transverse flux machine with passive rotor and flux-concentrating structure. IET Electr. Power Appl. 2019, 13, 922–931. [Google Scholar] [CrossRef]
- Viktor, G.; Dobzhanskyi, O.; Rostislav, G.; Gouws, R. Improvement of Transverse-Flux Machine Characteristics by Finding an Optimal Air-Gap Diameter and Coil Cross-Section at the Given Magneto-Motive Force of the PMs. Energies 2021, 14, 755. [Google Scholar] [CrossRef]
- Kowol, M.; Łukaniszyn, M.; Latawiec, K.J. Optimization of a Transverse Flux Motor Using an Evolutionary Algorithm. IFAC Proc. Vol. 2009, 14, 71–76. [Google Scholar] [CrossRef]
- Yang, X.; Kou, B.; Luo, J.; Zhang, H.; Shao, Y. Analysis of a Novel Transverse-flux Machine with Dual-tooth-slot Core Configuration for Direct-drive Applications. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems, ICEMS 2019, Harbin, China, 11–14 August 2019; pp. 2019–2022. [Google Scholar] [CrossRef]
- Yang, X.; Kou, B.; Luo, J.; Zhang, H. Electromagnetic Design of a Dual-Consequent-Pole Transverse Flux Motor. IEEE Trans. Energy Convers. 2020, 35, 1547–1558. [Google Scholar] [CrossRef]
- Yang, X.; Kou, B.; Luo, J.; Zhang, H. A Novel Dual-Consequent-Pole Transverse Flux Motor and Its Analytical Modeling. IEEE Trans. Ind. Electron. 2021, 68, 4141–4152. [Google Scholar] [CrossRef]
- Svechkarenko, D. On Design and Analysis of a Novel Transverse Flux Generator for Direct-driven Wind Application. Ph.D. Thesis, Royal Institute of Technology, Stockholm, Sweden, 2010. [Google Scholar]
- Kou, B.; Yang, X.; Luo, J.; Zhou, Y.; Zhang, H. Comparison of torque characteristic between two transverse flux motors with passive external rotor structure. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems, ICEMS 2017, Sydney, NSW, Australia, 11–14 August 2017; pp. 11–14. [Google Scholar] [CrossRef]
- Zhao, X.; Niu, S. Design of a Novel Consequent-Pole Transverse-Flux Machine with Improved Permanent Magnet Utilization. IEEE Trans. Magn. 2017, 53, 1–5. [Google Scholar] [CrossRef]
- Rabenstein, L.; Dietz, A.; Kremser, A.; Parspour, N. Semi-analytical calculation of a laminated transverse flux machine. In Proceedings of the 2020 International Conference on Electrical Machines, ICEM 2020, Gothenburg, Sweden, 23–26 August 2020; pp. 721–727. [Google Scholar] [CrossRef]
- Azarinfar, H.; Aghaebrahimi, M.R. Design, analysis and fabrication of a novel transverse flux permanent magnet machine with disk rotor. Appl. Sci. 2017, 7, 860. [Google Scholar] [CrossRef] [Green Version]
- Pourmoosa, A.A.; Ghods, M.; Faiz, J.; Vaez-Zadeh, S. Diagnosis and detection of dynamic eccentricity fault for permanent magnet transverse flux generator. IET Electr. Power Appl. 2021, 15, 528–541. [Google Scholar] [CrossRef]
- Oh, J.H.; Kwon, B.I. Design, optimization, and prototyping of a transverse flux-type-switched reluctance generator with an integrated rotor. IEEE Trans. Energy Convers. 2016, 31, 1521–1529. [Google Scholar] [CrossRef]
- Rathod, B.A.; Havaldar, G.V.; Bastawade, P.; Chaudhari, B.N.; Ugale, R.T. Design of poly-phase outer rotor homo-polar transverse flux machine using ferrite magnets and laminations. In Proceedings of the 2018 23rd International Conference on Electrical Machines, ICEM 2018, Alexandroupoli, Greece, 3–6 September 2018; pp. 2112–2116. [Google Scholar] [CrossRef]
- Hasan, I.; Chowdhury, A.; Sozer, Y. Effect of Pole Shaping on Cogging Torque, Torque Ripple and Vibrational Performance in Consequent Pole TFM. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition, ECCE 2018, Portland, OR, USA, 23–27 September 2018; pp. 7330–7335. [Google Scholar] [CrossRef]
- Husain, T.; Hasan, I.; Sozer, Y.; Husain, I.; Muljadi, E. Design of a Modular E-Core Flux Concentrating Transverse Flux Machine. IEEE Trans. Ind. Appl. 2018, 54, 2115–2128. [Google Scholar] [CrossRef]
- Havaldar, G.V.; Rathod, B.A.; Chaudhari, B.N.; Golatgaonkar, P. A Novel Poly-Phase Outer Rotor Homo-Polar Transverse Flux Machine using Ferrite Magnets. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems, PEDES 2018, Chennai, India, 18–21 December 2018; pp. 8–12. [Google Scholar] [CrossRef]
- Golatgaonkar, P.; Chaudhari, B.; Ugale, R. Torque ripple reduction in homopolar poly-phase transverse flux machine. J. Eng. 2019, 2019, 3553–3558. [Google Scholar] [CrossRef]
- Yu, H.C.; Chuang, H.C.; Wang, Z.M.; Lin, C.K. Simplified model-free predictive current control for dual air-gap transverse-flux six-phase permanent magnet electric machines. Adv. Mech. Eng. 2017, 9, 1–9. [Google Scholar] [CrossRef]
- Liang, J.; Liu, G.; Zhang, F.; Jin, S.; Wang, D.; Liang, B. Magnetic Circuit Model and Finite Element Analyze of Stator Excitation Transverse Flux High Speed Permanent Magnet Synchronous Machine. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems, ICEMS 2019, Harbin, China, 11–14 August 2019. [Google Scholar] [CrossRef]
- Ahmed, A.; Husain, I. Power factor improvement of a transverse flux machine with high torque density. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference, IEMDC 2017, Miami, FL, USA, 21–24 May 2017. [Google Scholar] [CrossRef]
- Dobzhanskyi, O.; Gouws, R.; Amiri, E. Analysis of PM Transverse-Flux Outer Rotor Machines with Different Configuration. IEEE Trans. Ind. Appl. 2017, 53, 4260–4268. [Google Scholar] [CrossRef]
- Alaeddini, A.; Tahanian, H.; Darabi, A. Impact of Number of Phases on Electromagnetic Torque Characteristics of Transverse Flux Permanent Magnet Machines. Adv. Electromagn. 2019, 8, 118–129. [Google Scholar] [CrossRef] [Green Version]
- Fischer, J.; Schmid, M.; Parspour, N. Investigation of maximum torque per ampere and maximum efficiency control strategies of a transverse flux machine. In Proceedings of the 2020 International Conference on Electrical Machines, ICEM 2020, Gothenburg, Sweden, 23–26 August 2020; pp. 2527–2532. [Google Scholar] [CrossRef]
- Terfurth, J.; Schmid, M.; Parspour, N. Planar aligned transverse flux machine with integrated reduction gear. In Proceedings of the 2020 International Conference on Electrical Machines, ICEM 2020, Gothenburg, Sweden, 23–26 August 2020; pp. 714–720. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, Z.; Duan, G.; Liu, C. A Novel Bipolar Magnetic Field Crosslinking Transverse Flux Permanent Magnet Machine with High Torque Density. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems, ICEMS 2019, Harbin, China, 11–14 August 2019. [Google Scholar] [CrossRef]
- Lv, C.; Zhang, L.; Xu, Y.; Liu, Y. Research on novel high torque density transverse-flux permanent magnet motor. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems, ICEMS 2019, Harbin, China, 11–14 August 2019. [Google Scholar] [CrossRef]
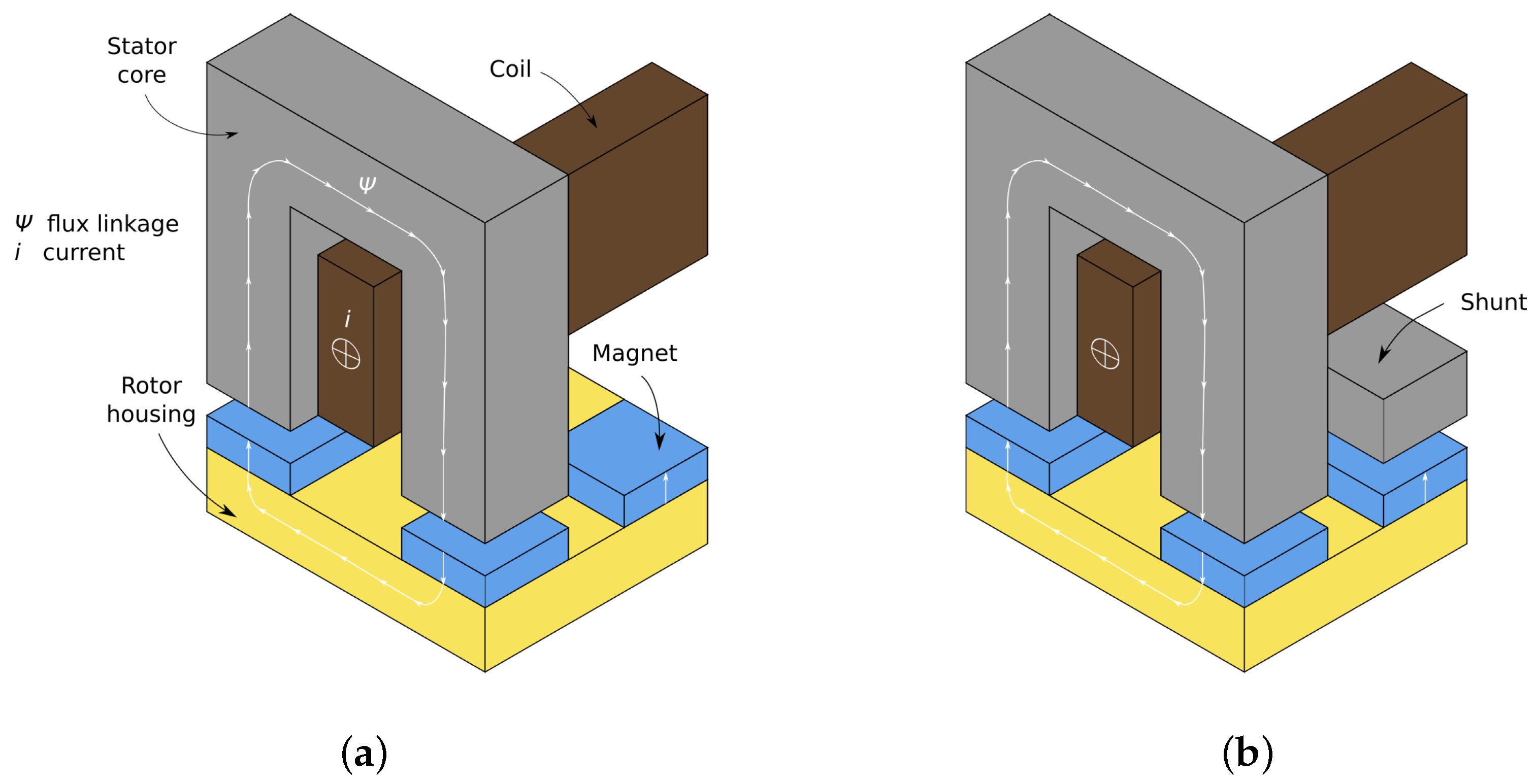
- Dobzhanskyi, O.; Gouws, R.; Amiri, E. On the Role of Magnetic Shunts for Increasing Performance of Transverse Flux Machines. IEEE Trans. Magn. 2017, 53, 1–8. [Google Scholar] [CrossRef]
- Dobzhanskyi, O.; Gouws, R.; Amiri, E. Comparison analysis of AC PM transverse-flux machines of different designs in terms of power density and cost. In Proceedings of the 58th Annual International Scientific Confererence on Power and Electrical Engineering of Riga Technical University, RTUCON 2017, Riga, Latvia, 12–13 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Boldea, I. Variable Speed Generators, 1st ed.; CRC Press: Boca Ratón, FL, USA, 2006; p. 550. [Google Scholar]
- Huang, S.; Luo, J.; Leonardi, F.; Lipo, T.A. A General Approach to Sizing and Power Density Equations for Comparison of Electrical Machines. IEEE Trans. Ind. Appl. 1998, 34, 92–97. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.G.; Lei, G.; Guo, Y.G.; Wang, T.S.; Ma, B. A robust design optimization method for manufacturing SMC-PMSMs and drive systems of six sigma quality. In Proceedings of the 2017 7th International Conference on Power Electronics Systems and Applications—Smart Mobility, Power Transfer and Security, PESA 2017, Hong Kong, China, 12–14 December 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Giedymin, A.; Cherriere, T.; Avcilar, F.; Schafer, U.; Mazaleyrat, F. Optimization of magnetic flux paths in transverse flux machines through the use of iron wire wound materials. In Proceedings of the 2019 IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, SDEMPED 2019, Toulouse, France, 27–30 August 2019; pp. 23–29. [Google Scholar] [CrossRef]
- Harasis, S.K.; Haque, M.E.; Chowdhury, A.; Sozer, Y. SiC Based Interleaved VSI Fed Transverse Flux Machine Drive for High Efficiency, Low EMI Noise and High Power Density Applications. In Proceedings of the ECCE 2020—IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020; pp. 4943–4948. [Google Scholar] [CrossRef]
- Xie, K.; Li, D.; Qu, R.; Pan, Y. Comparative Analysis of High Torque Density PM Machines. In Proceedings of the 2018 23rd International Conference on Electrical Machines, ICEM 2018, Alexandroupoli, Greece, 3–6 September 2018; pp. 2044–2050. [Google Scholar] [CrossRef]
- Roters, H.C. Electromagnetic Devices, 1st ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1941; p. 561. [Google Scholar]
- Pourmoosa, A.A.; Mirsalim, M.; Mahmoudi, A.; Vaez-Zadeh, S. Analytical model based on magnetic equivalent circuit for transverse-flux permanent-magnet machines. Int. Trans. Electr. Energy Syst. 2020, 30, 1–19. [Google Scholar] [CrossRef]
- Kremers, M. Analytical Design of a Transverse Flux Machine. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2016. [Google Scholar]
- Smoleń, A.; Gołȩbiowski, L.; Gołȩbiowski, M.; Mazur, D. Computationally efficient method of co-energy calculation for transverse flux machine based on Poisson equation in 2D. Energies 2019, 12, 4340. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RFM | AFM | TFM | |
|---|---|---|---|
| Air gap | RD | AX | RD or AX |
| Stator winding | DT or CO | DT or CO | RS or CO |
| Rotor | CY | DS | CY or DS |
| Ref. | Stator Core | PM | Torque Density (Nm/kg) | Torque Density (Nm/L) | Efficiency (%) | Power Factor |
|---|---|---|---|---|---|---|
| [70] | U-core | SM | 0.86 active † | - | 86 | 0.874 |
| [93] | 2.9 total | - | 76.0 | - | ||
| [105] | - | 18.4 | 76.2 | 0.49 | ||
| [97] | C-core | SM | 24.5 *1 | - | - | 0.7 |
| [25] | CP stator | FC | - | - | ≈67 & 40 2 | ≈0.2 |
| [95] | SM | 1.78 active | - | 77 | - | |
| [15] | Quasi-U | FC | 3.28 total 3 | - | - | 0.202 |
| [68] | - | 6.31 4 | 89.25 | - | ||
| [125] | 9-shaped | SM | 4.98 total | 4.155 | - | - |
| [72] | Hook-shaped | FC | 3.72 total 5 | 9.40 | 91.1 | 0.69 |
| [68] | E-core | FC | - | 8.87 | 88.23 6 | - |
| [115] 7 | 3.28 total | - | - | 0.676 | ||
| [66] 8 | H-core | 9 | - | - | 95 | 0.81 |
| Symbol | Value | Unit |
|---|---|---|
| 1 | A | |
| 7 | H | |
| 0.5 | A | |
| 4 | H | |
| 2 | H | |
| 10 | H | |
| 314 | rad/s | |
| ° |
| Ref. | Cogging Torque Reduction Technique | Change in the Cogging Torque (%) | Change in the Average Torque (%) |
|---|---|---|---|
| [64] | Halbach arrays of PMs | −80% | +8% |
| [75] | −93.8% | +3% | |
| [77] | PMs skewing | −97% | −8% |
| [19] | Stator skewing | −90% | - |
| [98] | Tooth pitching | −63% | - |
| [114] | Stator pole shaping | −58.4% | - |
| [112] | Rotor pole shaping | −93.4% | - |
| [117] | −65.4% | +17.7% | |
| [98] | Pole width adjusting | ≊−37% | - |
| [127] | Magnetic shunts | ≊−84 & −62.5% | - |
| [118] | Stator and rotor notches | −70.2% | −6.5% |
| [117] | Number of phases | −76.7% | −4.0% |
| [69] | Combination of techniques | −90% | −9% |
| [117] | −85.3% | +6.9% |
| Ref. | Material | Cost (€/kg) |
|---|---|---|
| [80] | Magnetic steel | 3.5 |
| [73] | Laminated steel | 2.5 |
| [80] | NdFeB PMs | 45 |
| [15] | Ferrite PMs | 4–5 times cheaper than NdFeB and SmCo |
| [80] | Copper | 12.4 |
| [73] | 8 |
| Pros | Cons |
|---|---|
| Magnetic and thermal isotropy [5,98,110] | Lower permeability [5,90,98] (typically 500 up to maximum 900 [132]) that contributes to fringing [58] |
| Lower losses at high frequencies [131] (over 300 Hz [110]–600 Hz [129]) due to eddy current losses [5] | Higher losses at low frequencies [131] due to hysteresis losses [97] |
| Lower mass density [98] | Weak mechanical performance [5,98] |
| Manufacturing cost can be lower with high-volume productions [98,110] | Very high cost for prototyping [98] |
| Ref. | [14] | [95] | [110] | [112] |
|---|---|---|---|---|
| TF | Motor | Motor | Generator | Generator |
| Load motor | Induction | Induction | Asynchronous | Servomotor |
| Drive | 4-quadrant drive | MOSFET power inverter | Variable-frequency inverter | - |
| Torque sensor | x | x | - | x |
| Gear or coupling | - | x | - | 1:5 gear |
| Encoder | x | x | - | x |
| Electric load | - | - | R | R-L |
| Data view | Power analyzer | - | Oscilloscope | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ballestín-Bernad, V.; Artal-Sevil, J.S.; Domínguez-Navarro, J.A. A Review of Transverse Flux Machines Topologies and Design. Energies 2021, 14, 7173. https://doi.org/10.3390/en14217173
Ballestín-Bernad V, Artal-Sevil JS, Domínguez-Navarro JA. A Review of Transverse Flux Machines Topologies and Design. Energies. 2021; 14(21):7173. https://doi.org/10.3390/en14217173
Chicago/Turabian StyleBallestín-Bernad, Víctor, Jesús Sergio Artal-Sevil, and José Antonio Domínguez-Navarro. 2021. "A Review of Transverse Flux Machines Topologies and Design" Energies 14, no. 21: 7173. https://doi.org/10.3390/en14217173