1. Introduction
Due to increasingly constrained energy resources and the urgent need to reduce pollution, MEA technology [
1,
2] has received attention in the field of aircraft technology. The launch of the Boeing 787 [
3] and the Airbus A380 [
4] marked the mature application of MEA technology. MEA technology aims to replace other secondary energy sources such as mechanical, pneumatic, and hydraulic energy with as much electrical energy as possible. Thus, aero-generators are playing an important role in the system [
5,
6] and their capacity needs to increase. The elimination of the integrated drive generator (IDG) makes the frequency of the electrical power systems variable. Therefore, the aero-generators of MEA need to work under various operating conditions.
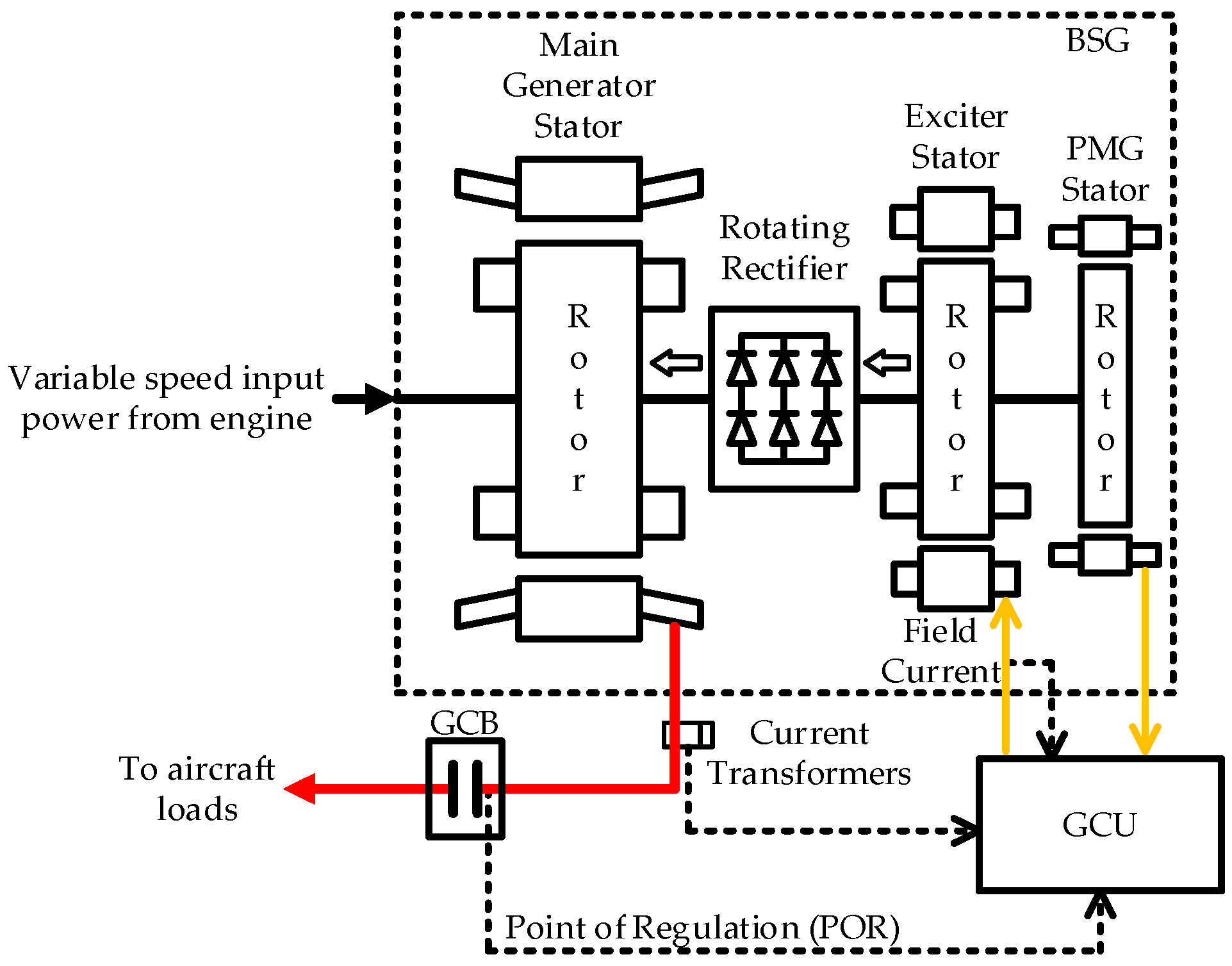
A brushless synchronous generator (BSG) consists of three stages: a main generator, an exciter, and a permanent magnet generator. A BSG is the most commonly used aero-generator because brushless excitation is achieved by the application of the exciter, which improves the service life of the synchronous generator [
7,
8]. As a BSG needs to control the main generator output voltage by regulating the excitation current of the exciter [
9], it needs to be used in conjunction with a generator control unit (GCU). A complete power generation system structure is shown in
Figure 1.
Aero-generators operate with a varying ambient temperature, speed, and load. They introduce brushless exciter and rotating rectifier links, which can have an impact on the steady-state accuracy and dynamic performance of the power generation system. Early generator controllers were implemented based on analog circuits so the control method often used a single-voltage loop control method or a dual-loop control method with an outer voltage loop and an inner field current loop. In a single-loop control, the output voltage sampling feedback is subtracted from the reference value and adjusted by the PI controller to control the power switches to regulate the output voltage. The dual-loop control method introduces an inner feedback loop of the field current based on a single-loop control [
10] to improve the system performance.
The accuracy of an analog circuit is affected by the ambient temperature. In addition, the control parameter adjustment process is not convenient. Therefore, with the development of digital circuits, generator controllers have also been implemented based on digital circuits [
11,
12]. Due to digital controllers such as digital signal processors (DSP), it is possible to apply various new control algorithms for generator controllers [
13,
14,
15,
16,
17,
18]. In [
17], a modified model reference adaptive system (MRAS) method for the speed sensorless control of an interior permanent magnet synchronous motor (IPMSM) was represented. In [
18], a sliding mode controller was used to replace the conventional proportional-integral (PI) speed loop and a finite position phase-locked loop based on the dichotomy was added to achieve a sensorless speed control and provide an accurate rotor position angle. In [
11], a three-loop control method with a load feedforward compensation link was proposed. The
d-axis component of the load current was used to compensate for the reference value of the field current, which in turn improved the performance of the control system for the load variations. The method required additional load current detection circuits and a rotor position estimation method, thus increasing the complexity of the hardware and software system.
The impedance parameters of the MG and exciter vary at different operating points. In addition, the system includes a nonlinear link, the rotating rectifier, so there are many nonlinear factors in the power generator system [
19,
20,
21]. A conventional PI controller needs a second-order linear model to describe the system [
12], making it hard to tune the control parameters for aero-generators.
When the system model is highly nonlinear and the parameters always vary, a fuzzy PI controller is an effective approach. Fuzzy control has the property of a universal function approximator and the designer can model unknown processes using a series of IF-THEN fuzzy rules, which allows the future state of the system to be predicted using fuzzy models. Fuzzy control is not only used for systems that are difficult to model but also for systems where the mathematical model is known but more complex. Although the control performance cannot always be improved, the time required for the controller design and its practical application will be greatly reduced. In [
22], a fuzzy PI controller was applied and the simulation results showed that the fuzzy PI controller had a better dynamic performance than a traditional voltage control method under different speed and load conditions.
This paper adopts a dual fuzzy PI controller to introduce the rotor speed into an additional fuzzy controller to compensate for the PI control parameters to achieve a better control effect in the full speed range.
Section 2 describes the system architecture of the variable frequency BSG system, establishes the mathematical model, and shows the differences in the frequency response at different operating conditions.
Section 3 presents the principle of the generator voltage regulation based on a dual fuzzy PI controller and shows its implementation method.
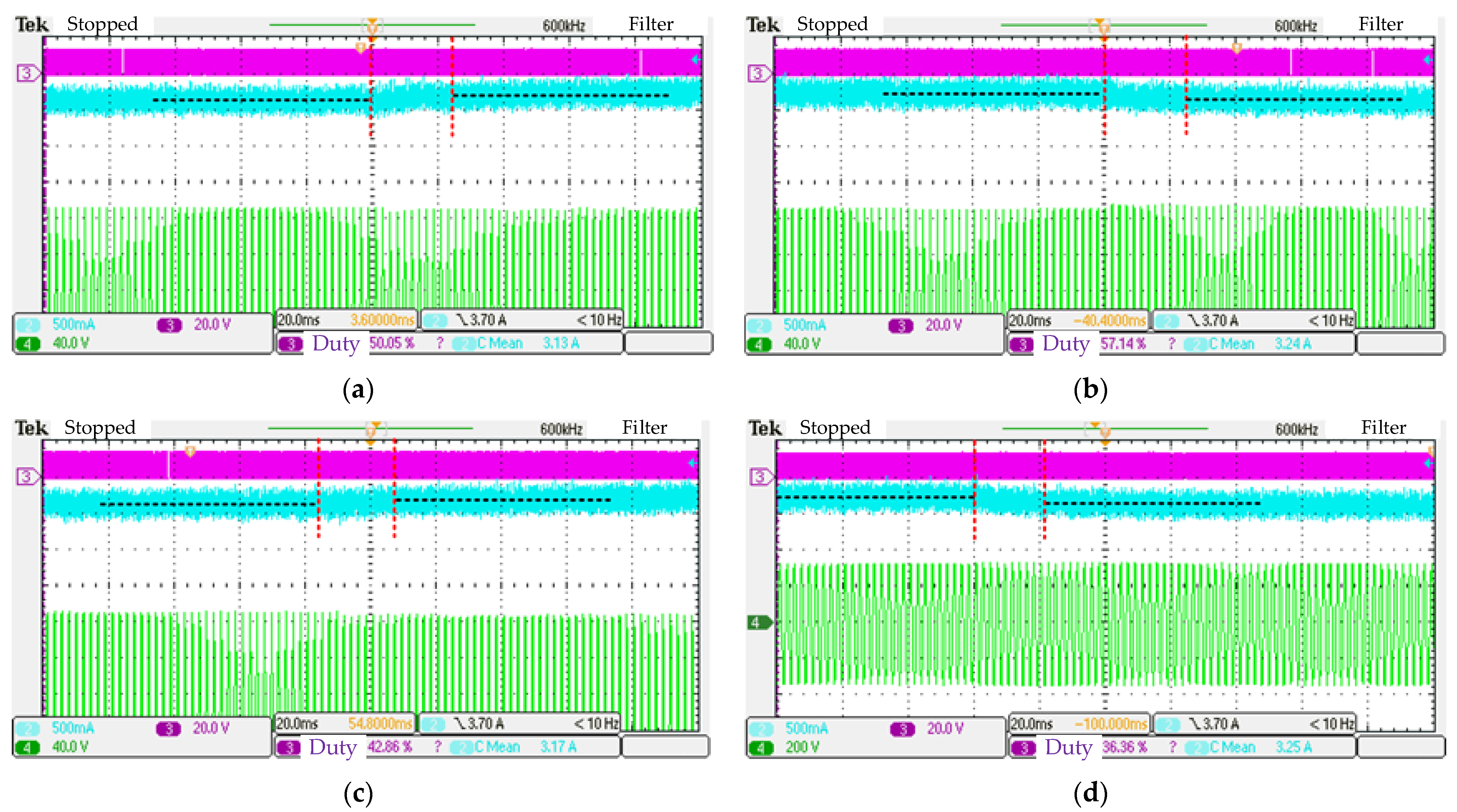
Section 4 conducts simulation tests and compares the dual fuzzy PI control strategy with a conventional PI control and a fuzzy PI control strategy without considering the rotor speed to verify the performance of the dual fuzzy PI control strategy. Additionally, an experimental platform of a variable frequency power generation system is built to verify the effectiveness of the control method proposed in this paper.
5. Conclusions
In this paper, we have shown the development history of the regulation methods for aero brushless synchronous generators. Aero-generators need to work under different speeds and loads and the parameters of their control systems need to be adjusted to achieve an optimal performance. A fuzzy PI control is a control method based on a PI control and the introduction of a fuzzy logic controller to adjust the control parameters according to the real-time operating conditions; therefore, it was suitable in this application.
In this paper, a state space model of the generator was established. The frequency response characteristics under different operating points were obtained, revealing the influence of different operating conditions on the power generation system. To cope with the influence of a speed variation on the performance of the power generation system, we applied an additional fuzzy logic controller based on a fuzzy PI controller and modified the PI parameters of the voltage loop by introducing the generator speed value. A Simulink simulation model of the variable frequency AC power generation system was built and the advantages of the dual fuzzy PI controller over the conventional control method were compared by simulation. Finally, power generation system experiments were implemented to show that the dual fuzzy PI controller could improve the steady-state and dynamic performance of the brushless synchronous generator, which validated the previous theoretical study.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}