
Torque Vectoring Control of RWID Electric Vehicle for Reducing Driving-Wheel Slippage Energy Dissipation in Cornering



Abstract
:1. Introduction
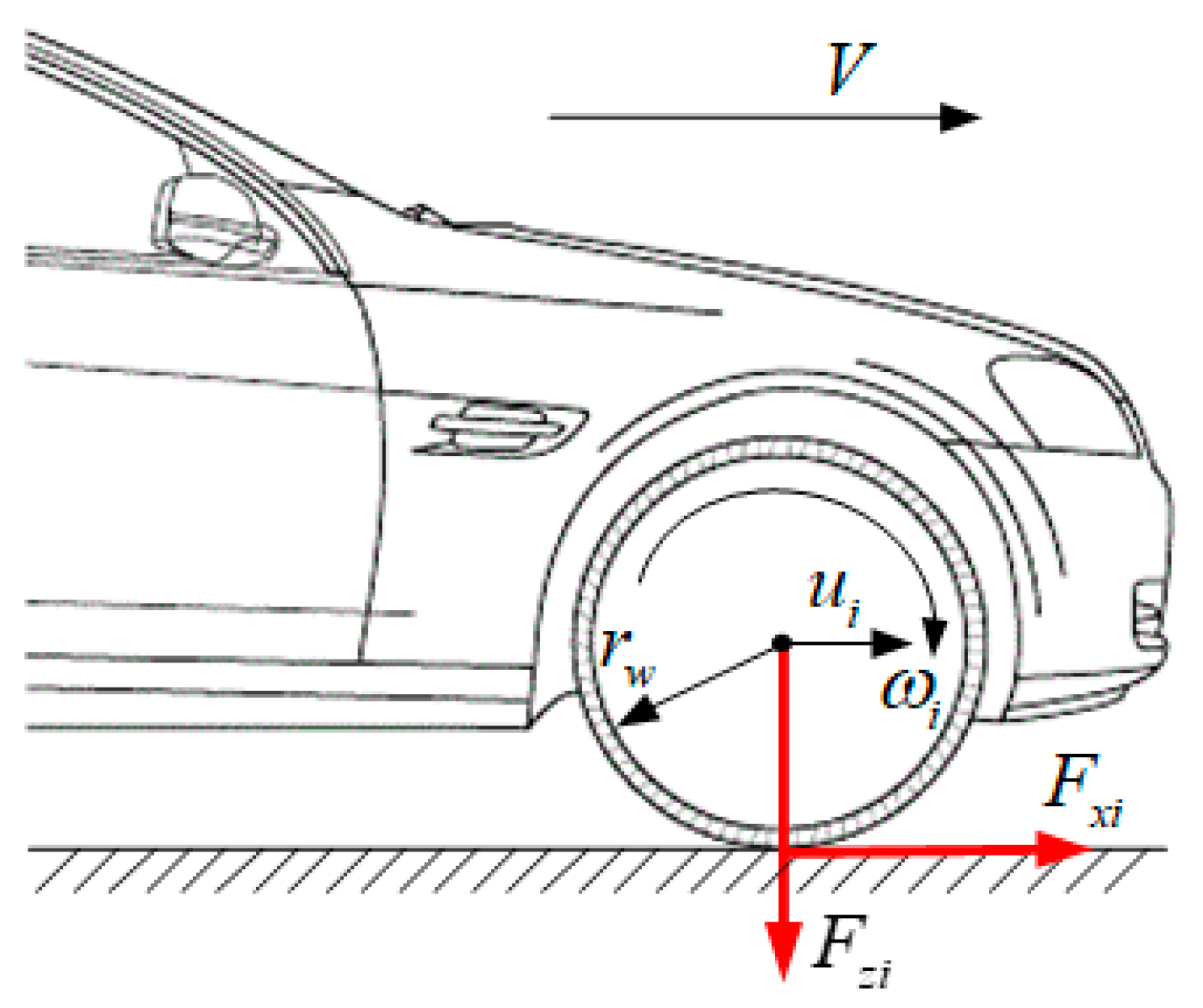
2. Theoretical Analysis of the Effect of Torque Vectoring on Tire Slip
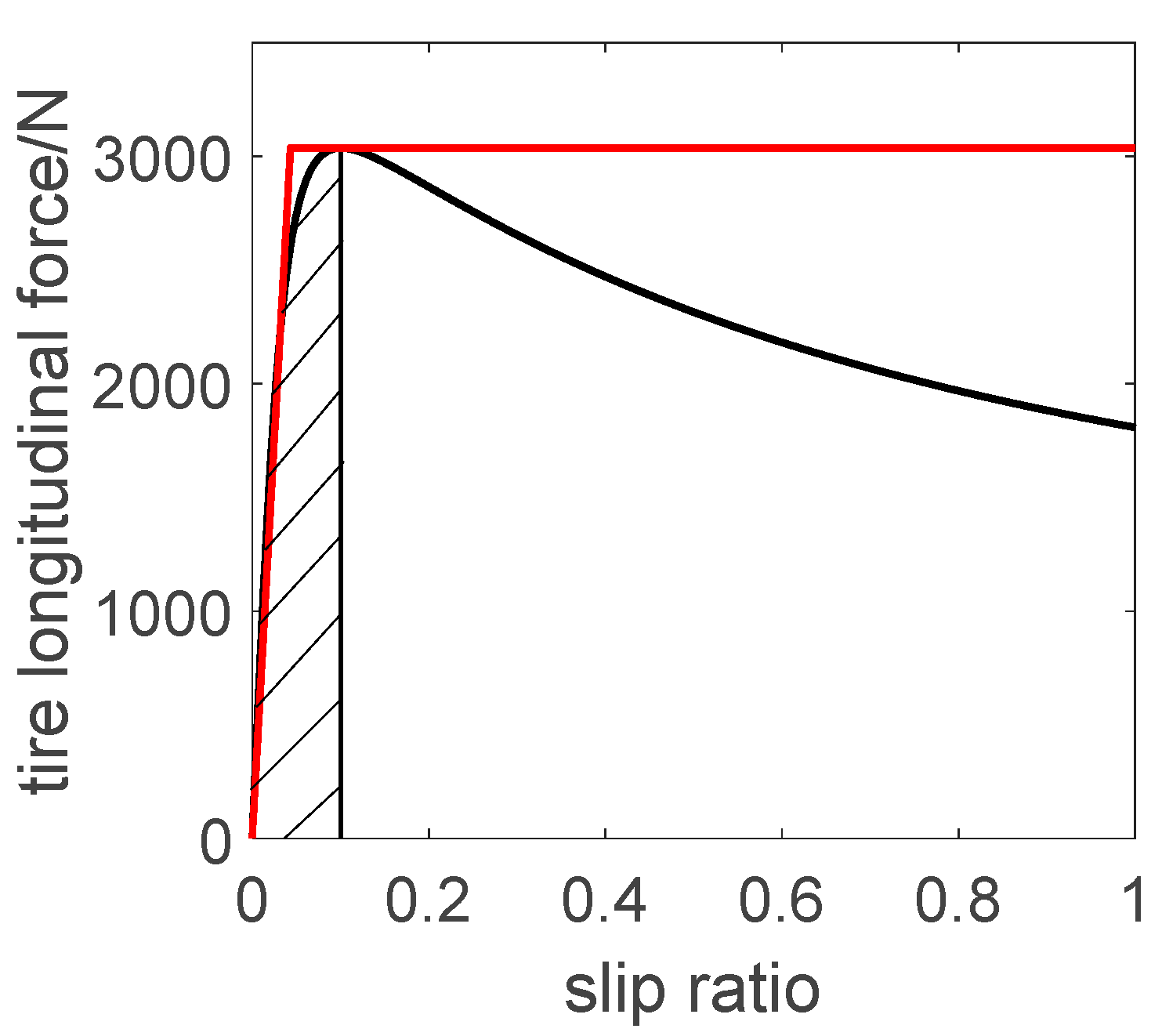
3. The Definition and Estimation for Tire Linear Longitudinal Stiffness (TLLS)
3.1. The Definition of TLLS
3.2. Estimator for TLLS
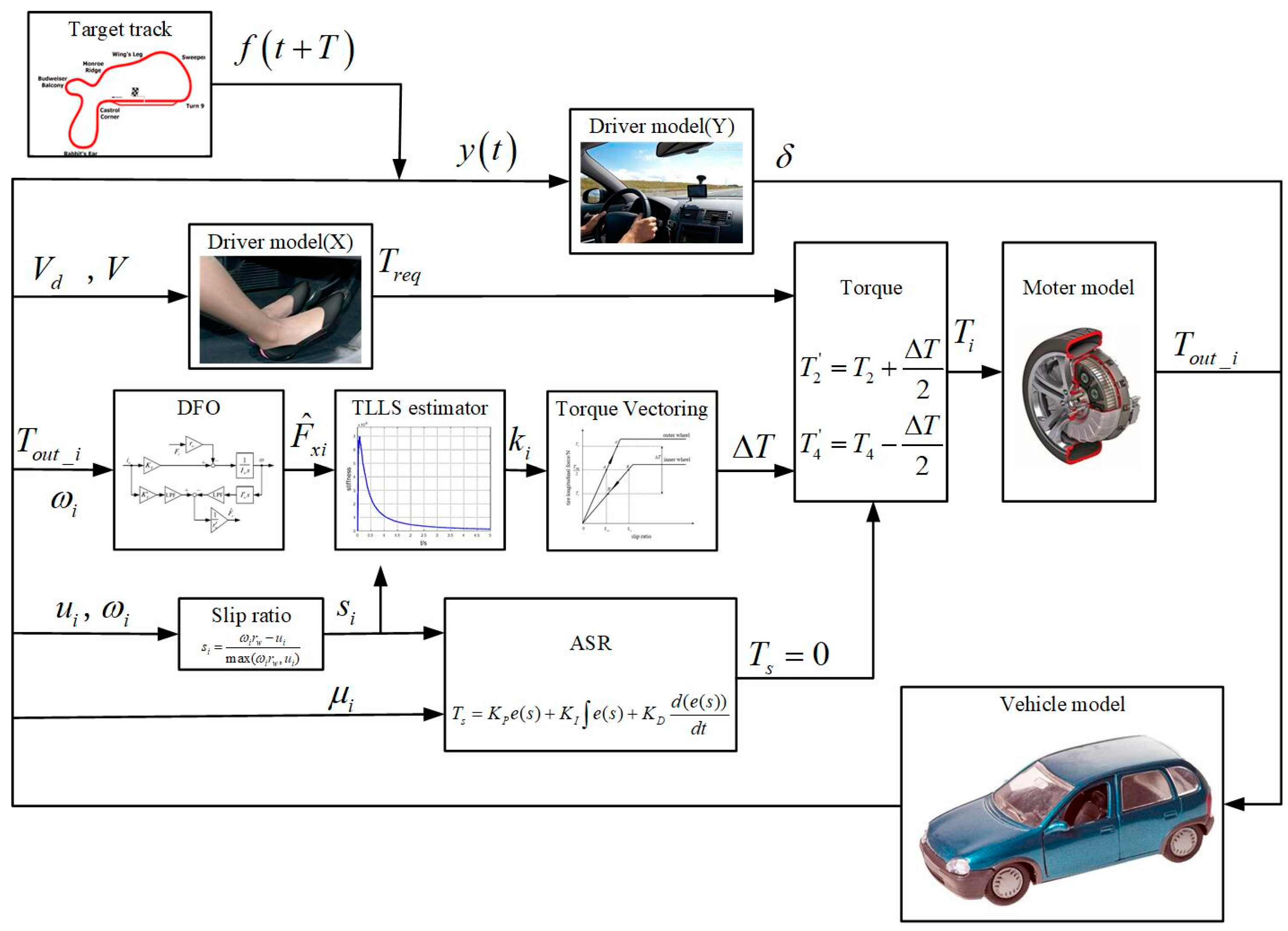
4. Vehicle Model and Torque Vectoring Control Strategy
4.1. Vehicle Model
4.2. Determination of the Differential Torque
4.3. Torque Vectoring Control Strategy
5. Simulation Verification
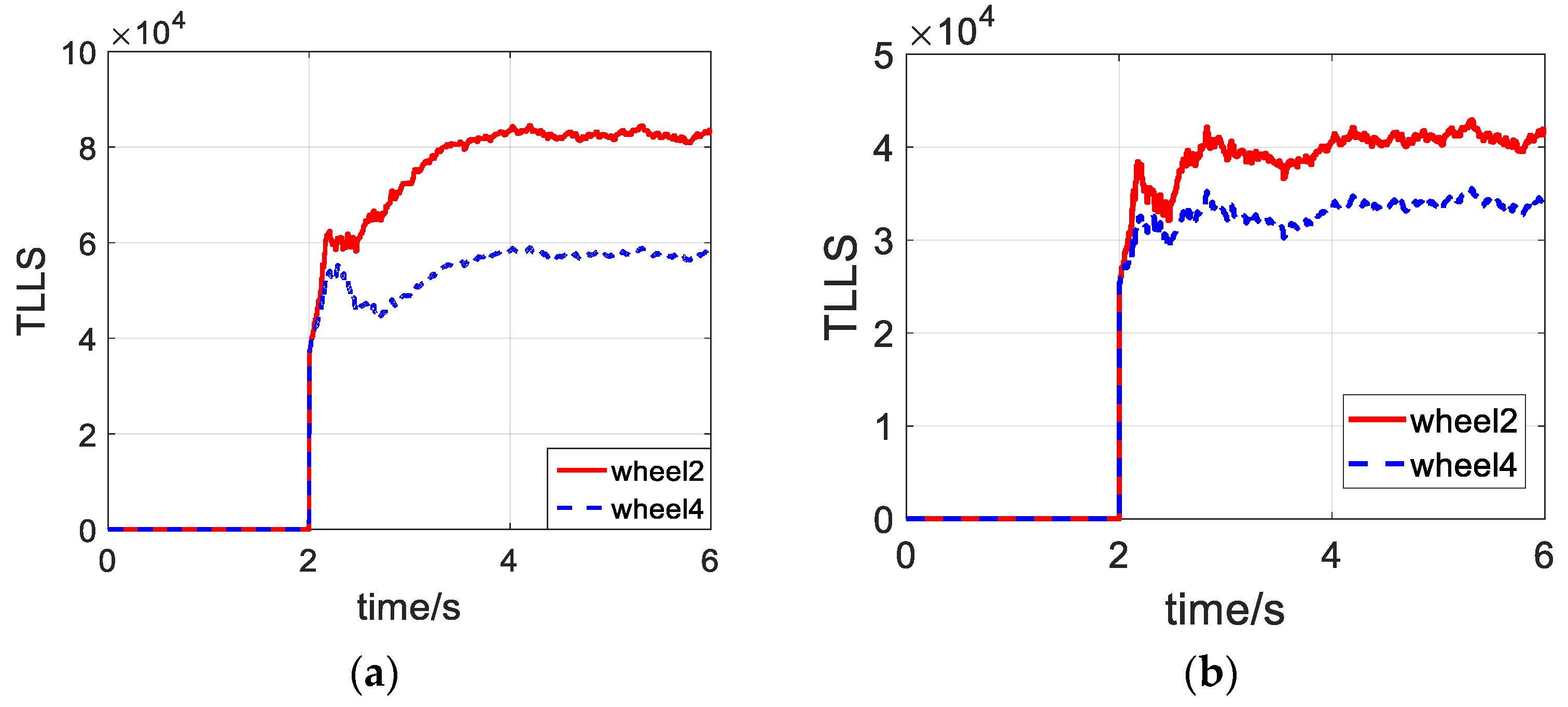
5.1. Verification for Longitudinal Linear Stiffness Estimation
5.2. Verification for Torque Vectoring Control Strategy
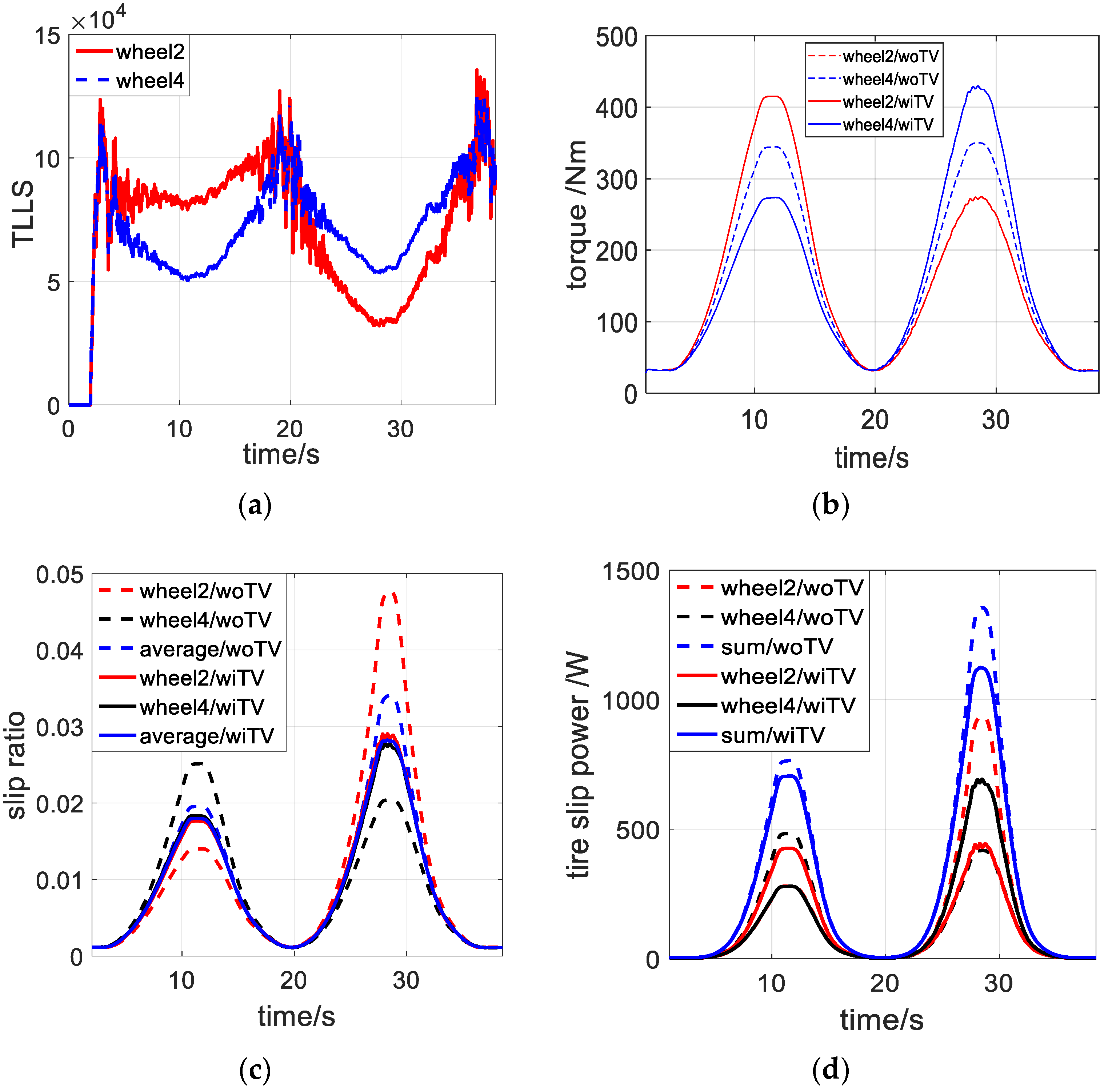
5.2.1. Lemniscate-Shape Path Following
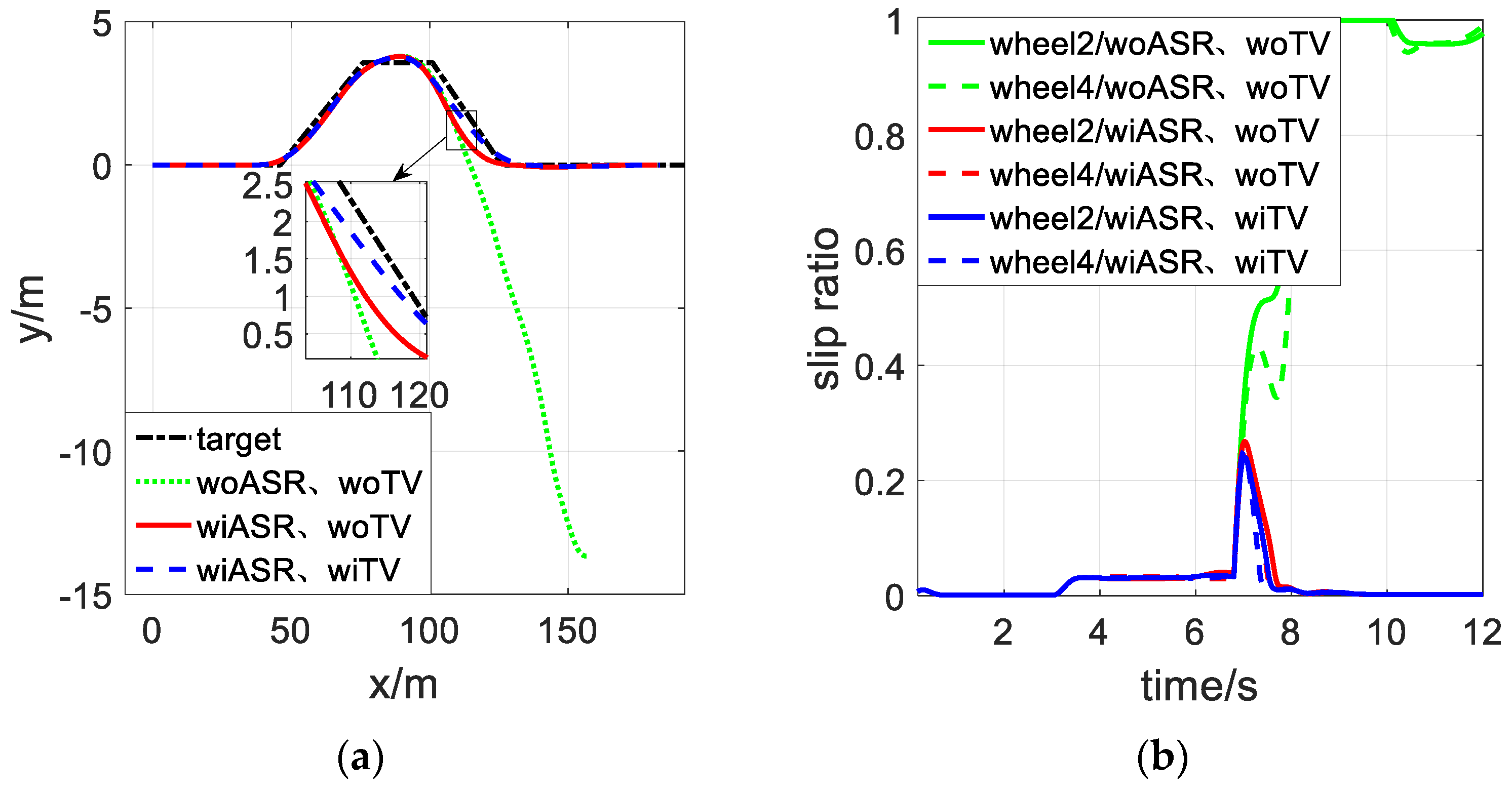
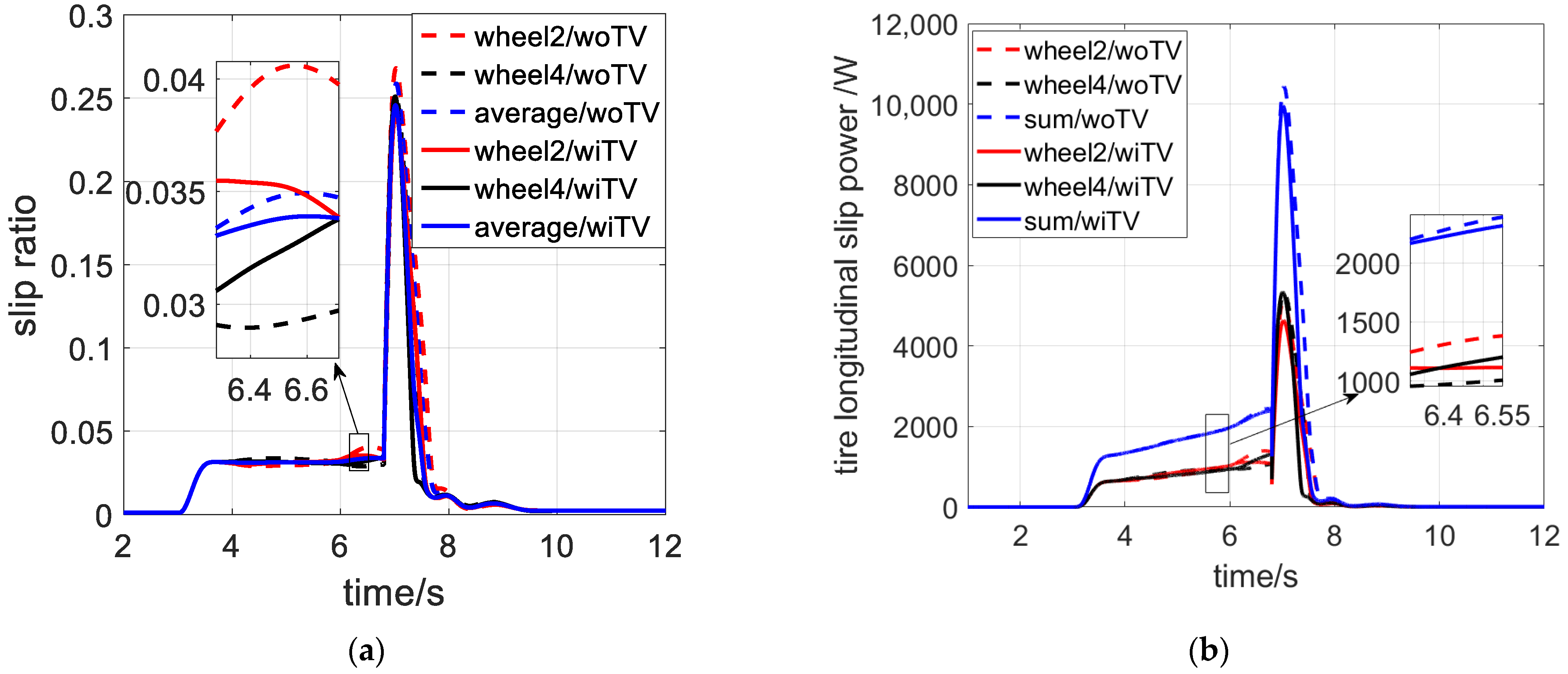
5.2.2. Double Lane Change Maneuvering
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| RWID | rear-wheel-independent-drive |
| ASR | acceleration slip regulation |
| TLLS | tire linear longitudinal stiffness |
| TV | torque vectoring |
| DFO | driving force observer |
| RLS | recursive least squares |
| wiTV | with TV control |
| woTV | without TV control |
| wiASR | with ASR control |
| woASR | without ASR control |
| Fxi(i = 1,2,3,4) | longitudinal force |
| Ki(i = 1,2,3,4) | driving stiffness of the wheel |
| Si(i = 1,2,3,4) | slip ratio of the wheel |
| Treq | total required torque |
| Tw | driving torque of inner |
| Tn | driving torque of outer |
| Sin | slip ratio of inner wheel |
| Sout | slip ratio of outer wheel |
| ΔT | differential torque |
| kin, kout | tire longitudinal stiffness of the inner and outer driving wheels respectively |
| Δsavg | average slip ratio of the rear axle |
| Pws | total slip energy consumption |
| Vxi(i = 1,2,3,4) | longitudinal slip velocity |
| Vi(i = 1,2,3,4) | rotation linear velocity |
| Vout, Vin | rotation linear velocity of the outer wheel and the inner wheel respectively. |
| Iw | rotational inertia of the wheel |
| ωi | rotational speed |
| ui | center speed of the wheel. |
| δi, δo | turning angles of the inner front wheel and outer front wheel respectively |
| B | wheel track |
| v | lateral speed |
| u | longitudinal speed |
| Fyi(i = 1,2,3,4) | lateral force |
| Tout | in-wheel motor |
| T*out | target output torque |
| m | mass of the whole vehicle |
| lf | distance from the body centroid to the front axle |
| lr | distance from the body centroid to the rear axle |
| rw | tire rolling radius |
References
- Viola, F. Electric Vehicles and Psychology. Sustainability 2021, 13, 719. [Google Scholar] [CrossRef]
- Mariusz, I.; Marianna, J. An Efficient Hybrid Algorithm for Energy Expenditure Estimation for Electric Vehicles in Urban Service Enterprises. Energies 2021, 14, 2004. [Google Scholar]
- Gu, J.; Ouyang, M.; Lu, D.; Li, J.; Lu, L. Energy efficiency optimization of electric vehicle driven by in-wheel motors. Int. J. Automot. Technol. 2013, 14, 763–772. [Google Scholar] [CrossRef]
- Zhang, H.H.; Jin, L.Q.; Wang, Q.N. Simulation of energy-saving driving mode during steering for motorized wheels driving vehicle. J. Traffic Transp. Eng. 2010, 4, 42–46. [Google Scholar]
- Koehler, S.; Viehl, A.; Bringmann, O.; Rosenstiel, W. Improved Energy Efficiency and Vehicle Dynamics for Battery Electric Vehicles through Torque Vectoring Control. In Proceedings of the IEEE Intelligent Vehicles Symposium, Seoul, Korea, 28 June–1 July 2015; pp. 749–754. [Google Scholar]
- Pennycott, A.; Novellis, L.D.; Sorniotti, A.; Gruber, P. The Application of Control and Wheel Torque Allocation Techniques to Driving Modes for Fully Electric Vehicles. SAE Int. J. Passeng. Cars Mech. Syst. 2014, 17, 488–496. [Google Scholar] [CrossRef]
- Pierpaolo, P.; Ivan, A.; Cesare, P. Optimal Energy Management for Hybrid Electric Vehicles Based on Dynamic Programming and Receding Horizon. Energies 2021, 14, 3502. [Google Scholar] [CrossRef]
- Kobayashi, T.; Katsuyama, E. Efficient Direct Yaw Moment Control: Tyre Slip Power Loss Minimisation for Four-Independent Wheel Drive Vehicle. Int. J. Veh. Mech. Mobil. 2018, 56, 719–733. [Google Scholar] [CrossRef]
- Himeno, H.; Katsuyama, E.; Kobayashi, T. Efficient Direct Yaw Moment Control during Acceleration and Deceleration While Turning. SAE 2016 World Congress and Exhibition. Available online: https://saemobilus.sae.org/content/2016-01-1677/ (accessed on 5 April 2016).
- Sun, W.; Rong, J.; Wang, J.; Zhang, W.; Zhou, Z. Research on Optimal Torque Control of Turning Energy Consumption for EVs with Motorized Wheels. Energies 2021, 14, 6947. [Google Scholar] [CrossRef]
- Suzuki, Y.; Kano, Y.; Abe, M. A study on tire force distribution controls for full drive-by-wire electric vehicle. Veh. Syst. Dyn. 2014, 52, 235–250. [Google Scholar] [CrossRef]
- Wang, Y.; Fujimoto, H.; Hara, S. Driving Force Distribution and Control for EV with Four In-Wheel Motors: A Case Study of Acceleration on Split-Friction Surfaces. IEEE Trans. Ind. Electron. 2017, 64, 3380–3388. [Google Scholar] [CrossRef]
- Maeda, K.; Fujimoto, H.; Hori, Y. Four-wheel driving-force distribution method based on driving stiffness and slip ratio estimation for electric vehicle with in-wheel motors. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012. [Google Scholar]
- Wang, J.; Gao, S.; Wang, K.; Wang, Y.; Sun, W.; Wang, Q. Wheel torque distribution optimization of four-wheel independent-drive electric vehicle for energy efficient driving. Control Eng. Pract. 2021, 110, 1–14. [Google Scholar] [CrossRef]
- Lin, C.; Xu, Z. Wheel Torque Distribution of Four-Wheel-Drive Electric Vehicles Based on Multi-Objective Optimization. Energies 2015, 8, 3815–3831. [Google Scholar] [CrossRef] [Green Version]
- Dieckmann, T. Assessment of Road Grip by Way of Measured Wheel Variables. In Proceedings of the FISITA, London, UK, 7–11 June 1992. [Google Scholar]
- Gustafsson, F. Slip-Based Estimation Of Tire-Road Friction. Automatica 2013, 33, 1087–1099. [Google Scholar] [CrossRef]
- Ikushima, Y.; Sawase, K. A Study on the Effects of the Active Yaw Moment Control. In Proceedings of the International Congress & Exposition, Detroit, MI, USA, 1 February 1995. [Google Scholar]
- Sun, W.; Wang, J.; Wang, Q.; Assadian, F.; Fu, B. Simulation investigation of tractive energy conservation for a cornering rear-wheel-independent-drive electric vehicle through torque vectoring. Sci. China Technol. 2018, 61, 257–272. [Google Scholar] [CrossRef]
- Isermann, R. Fahrdynamik-Regelung: Modellbildung, Fahrerassistenzsysteme, Mechatronik; Vieweg: Wiesbaden, Germany, 2006. [Google Scholar]
- Pacejka, H.B. Tire and Vehicle Dynamics; Butterworth Heinemann: Oxford, UK, 2012. [Google Scholar]
- Ahn, C.; Peng, H.; Tseng, H.E. Robust Estimation of Road Frictional Coefficient. IEEE Trans. Control Syst. Technol. 2012, 21, 1–13. [Google Scholar] [CrossRef]
- Yi, K.; Hedrick, K.; Lee, S. Estimation of Tire-Road Friction Using Observer Based Identifiers. Veh. Syst. Dyn. 2010, 31, 233–261. [Google Scholar] [CrossRef]
- Miller, S.L.; Youngberg, B.; Millie, A.; Schweizer, P.; Gerdes, J.C. Calculating Longitudinal Wheel Slip and Tire Parameters Using GPS Velocity. In Proceedings of the IEEE Proceedings of the American Control Conference, Arlington, VA, USA, 25–27 June 2001. [Google Scholar]
- Multirate hybrid adaptive control. IEEE Trans. Autom. Control 1986, 31, 582–586. [CrossRef]
- Haykin, S. Adaptive Filter Theory, 2nd ed.; Wiley: Hoboken, NJ, USA, 2002; Volume 4, pp. 469–490. [Google Scholar]
- Vahidi, A.; Stefanopoulou, A.; Peng, H. Recursive least squares with forgetting for online estimation of vehicle mass and road grade: Theory and experiments. Veh. Syst. Dyn. 2005, 43, 31–35. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Q.; Jin, L.; Song, C. Independent wheel torque control of 4WD electric vehicle for differential drive assisted steering. Mechatronics 2011, 21, 63–76. [Google Scholar] [CrossRef]
- Junya, Y.; Akira, K.; Keiji, W. A method of torque control for independent wheel drive vehicles on rough terrain. J. Terramechanics 2007, 44, 371–381. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| m | kg | 1300 |
| l | m | 2.662 |
| lr | m | 1.2247 |
| lf | m | 1.4373 |
| B | m | 1.4375 |
| I | kg·m2 | 1808 |
| Iw | kg·m2 | 1.85 |
| rw | m | 0.285 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Lv, S.; Sun, N.; Gao, S.; Sun, W.; Zhou, Z. Torque Vectoring Control of RWID Electric Vehicle for Reducing Driving-Wheel Slippage Energy Dissipation in Cornering. Energies 2021, 14, 8143. https://doi.org/10.3390/en14238143
Wang J, Lv S, Sun N, Gao S, Sun W, Zhou Z. Torque Vectoring Control of RWID Electric Vehicle for Reducing Driving-Wheel Slippage Energy Dissipation in Cornering. Energies. 2021; 14(23):8143. https://doi.org/10.3390/en14238143
Chicago/Turabian StyleWang, Junnian, Siwen Lv, Nana Sun, Shoulin Gao, Wen Sun, and Zidong Zhou. 2021. "Torque Vectoring Control of RWID Electric Vehicle for Reducing Driving-Wheel Slippage Energy Dissipation in Cornering" Energies 14, no. 23: 8143. https://doi.org/10.3390/en14238143