1. Introduction
In light of increased PV penetration [
1,
2,
3], it is necessary to analyze the requirements and challenges that existing power systems will face in near future. Degradation of transient stability and/or declining equivalent inertia of the power system is one of the major concerns [
4,
5,
6]. Due to lack of the inherent energy buffering capability in the case of power electronics-based PVS, as there are no physical rotating parts unlike classical thermal power generators, the effective inertia of the power grid is on the decline. This issue may lead to situations that can ultimately destabilize the power grid under extreme conditions. It is estimated that by the end of 2022, there will be a noticeable reduction in the equivalent inertia of power systems by up to 25% if proper measures are not taken [
4]. Any mismatch between the generated active power and the sporadic load demand can trigger frequency deviation and, in turn, large power swings; this could degrade the performance of the system. Low inertia systems will experience faster changes in frequency, which will lead to the false triggering of various protective relays in order to trip the DGs, which operate with a strict frequency band. This will, in turn, activate the load-shedding controllers, which will further worsen the situation, initiating a chain reaction. This situation may bring down the resilience of the power system even to small disturbances, and could trip a whole grid, which would result in complete blackout unless otherwise protected.
Several such cases have been reported in various parts of world in the recent past. In 2011, one such incident was experienced by the power system of the Northern Island of New Zealand, when the frequency nadir reached as low as 47.5 Hz with a severe RoCoF of 0.73 Hz/s [
4]. A similar incident happened in Hawaii with a RoCoF of 0.373 Hz/s resulting in back-to-back chain tripping of several DGs [
4]. Another such incident was reported in the Island of Cyprus in January 2012, and, in this case, the reason was severe RoCoF [
5]. Recently, in 2019, the renewable reach of the UK grid also experienced a frequency nadir (
) of 49.1 Hz due to the disconnection of about 350 MW of DGs from the parent grid, causing more than one million consumers to suffer [
6]. In view of this, it is essential for the PV systems to emulate inertial characteristics such as those of state-of-the-art synchronous generators. This contingent measure is highly essential in order to avoid the very real possibility of larger-scale future grid catastrophes. The concept of SI was actually derived from the ac micro-grids, which mostly suffer from the zero or low rotational inertia problem as most of the power sources are converter/inverter-based power electronics. Therefore, in order to behave as a virtual synchronous generator, it is recommended for the PV either to operate away from MPPT or to have some kind of energy storage while feeding power to the network. In this way, during grid disturbances, this storage can mimic the behavior of the actual rotational inertia to make the system stable, self-sustainable and more grid-friendly.
Many works have been cited in the literature that show the utilization of some kind of virtual or actual energy storage to emulate SI for the PVS by means of converter/inverter dynamics. These are mainly divided into two categories: Actual Storage-based and Virtual Storage-based. Both approaches have their own advantages and disadvantages and are reviewed in detail. In [
7,
8,
9,
10,
11,
12], the authors explored the use of a Battery Energy Storage System (BESS) to mimic the inertial response for PVS for different frequency event scenarios. In [
7], distributed ESS are studied for a large PVS using a coordinated central control scheme. However, in [
8,
9], the target was to optimize the lumped storage size and its life cycle, with an appropriate degree of control, for an islanded micro grid. In [
10], the authors tried to find out the optimal location of the lumped storage while taking into account the contingency of future blackouts and the severity of the stochastic PV penetration level. Some revenue-optimization control methods are presented in [
11,
12], where the BESS is used for both PFC as well as load shifting while optimizing the size of the storage. However, the adverse effect of the high ramping rate on the SOC and the lifespan of the BESS are not considered in both cases.
However, the use of BESS being the early approach towards frequency regulation certainly compromises between the ramp rate and the lifespan of the battery due to low power density. To address the issue of low ramp rate, the authors of [
13] explored the use of a flywheel as a hybrid storage approach to BESS that became less popular due to its larger footprint. Alternatively, a few authors [
14,
15,
16] also explored the concept of Super Conductive Magnetic Energy Storage (SMES) due to its burst power handling capability, rapid response time, high power density, and high efficiency compared to BESS, while targeting several power quality issues. However, major disadvantages such as the lager footprint of the coil for high power applications, the high running cost for maintaining the superconducting critical temperature, and the high material cost of the coil, make it unrealistic.
Recently, the concept of virtual energy storage approaches has drawn the attention of the research community as an effective solution towards the low lifespan of the BESS involving the mimicking of virtual inertia in PVS to improve the frequency nadir. One such approach is the PV reserve method, also known as PV delta power control [
17] or PV deloaded control [
18,
19,
20,
21,
22]. The operating mechanisms of both the methods are quite similar. In the former case, a major part of the installed PV modules is operated in MPPT mode, whereas a few modules are intentionally kept ideal or operated away from MPPT. However, in the latter case, the whole PV installation is operated in OFF MMPT mode. In [
23], the authors presented the concept of dynamic inertia emulation for PVS using the PV reserve method. The concern was that during the peak sun hour time, the power grid experiences a considerable fall in system inertia as the contribution is more from PV than the classical thermal generators. To achieve this, a neuro-fuzzy logic control-based self-adoptive algorithm is presented in [
23]. This modifies the PV reserve capacity based on the time-dependent generation and load demand to improve the system’s response to frequency events, while optimizing the utilization of the installed PV capacity. The authors of [
24,
25] proposed a similar approach as well, where a dynamic droop coefficient-based droop control technique was used in [
24] to emulate variable inertia support during frequency events. Nevertheless, this approach goes through a lot of power oscillation, as the complex control technique demands a proper tuning of its coefficients. In [
25], the authors implemented a complex self-adoptive fuzzy logic method to emulate virtual inertia to improve the frequency stability. However, in both studies, the proposed controls were the main concern, but the targeted energy storage types were undisclosed.
Though the PV reserve method sounds interesting, there are a few disadvantages of PV reserve methods over BESS, which certainly cannot be ignored. Firstly, it has a larger footprint, and lower power and energy density, as compared to BESS. Secondly, the former method is mostly uneconomical in terms of both fixed and running costs, as the PV system is under-utilized throughout the running time even though there are no frequency events. Thirdly, it is highly uncertain how PV will support the required power to emulate the frequency response during low-insolation and night-time periods. Recently, another virtual energy storage-based approach gained popularity in terms of addressing the issues with the PV reserve-type approach. The authors of [
26,
27,
28] tried to utilize the electrostatic energy of the DC-link capacitor to emulate virtual inertia during frequency events. Conversely, this approach was limited only to low power applications because of the low energy density of the DC-link capacitors and high fluctuation in DC-link voltage. Instead, a large capacitor can manage the work but will result in a larger footprint, higher costs and larger start-up times due to its slow dynamics [
29].
In view of all these issues, the electric double layer capacitor (ELDC), also known as the Super Capacitor (SC) or ultra-capacitor, has recently, become more popular owing to its high power and energy bursting capability, which are similar to SMES. At the same time, it has, comparatively speaking, a much smaller footprint than SMES, excellent efficiency (greater than 95%) and a long and maintenance-free life cycle compared to BESS (more than 30 years), and has a steadily improving benefit-to-cost ratio relative to SMES and Flywheel-type storage [
30]. There are several articles that have given emphasis to SC-based energy storage systems for grid quality improvement in PVS. Yet, as SC has comparatively low energy density than BESS, most of the approaches involve hybrid energy-based storages such as BESS with SC [
31], fuel cell with SC [
32], etc. In these approaches, the transient and the steady state power and/or energy sharing between the storage types were decided by the proposed coordinated control. The hybrid storage concepts were found to be more successful when the target not only provided frequency support but also high-energy intensive services such as load shifting and peak saving. Thus, these approaches optimize costs by improving the utilization factor and lifetime of the storage systems. However, the hybrid storage concept seems to be a costly affair when only the frequency support activities are targeted. In this paper, the focus lies in the most simple and economic solution for frequency services in PVS, which is better achieved by employing SCs.
In [
30,
33], a low voltage DC-link was considered for the inverter and the corresponding DC-link was replaced by an SC/ELDC to target PV generation smoothing. However, this demanded a larger SC for a specific energy requirement, as it was not possible to discharge the DC-link capacitor beyond a certain limit in order for the inverter to function. This resulted in higher costs and the SC was also underutilized. However, there are many other studies that also use a larger SC to avoid the gain requirement of the interfacing converters [
31,
32,
34,
35,
36,
37,
38] for different applications in DC/AC micro grids. To avoid the need for an additional converter for use in the charge control function, many articles [
38,
39,
40,
41] have proposed various isolated or non-isolated multiport converter topologies as well to interface energy storage for the PVS. However, most of these isolated topologies, if used for the integration of SC, will suffer from gain problems related to high voltage and current stresses due to large variations in SC voltage. However, in some of the cases [
41,
42,
43], irrespective of isolated or non-isolated type of topology, the system configuration does not allow the integration of low voltage energy storage to the PVS. In [
44], a switch capacitor-derived multiport converter was proposed to integrate a low voltage storage to the PVS; however, the same could not be suggested for the integration of SC, because, in cases in which switched capacitor-derived converters are used, the efficiency drops severely when the voltage gain moves away from the fixed nominal value. The authors of [
45,
46,
47] proposed various series cascaded topologies based on the fractional power processing concept to integrate energy storage; however, the power process capability of the storage was strictly limited by the voltage difference between the input and output port voltage of the converter. Moreover, the interfacing converter must be a very high-gain converter although it processes partial power. Apart from that, the existing cascaded topologies have serious fault-tolerance limitations due to their use of series configurations, and these issues certainly cannot be ignored.
In consideration of all the aforementioned issues, in this paper, the advantages of SC are used as a basis to provide frequency response services to medium-voltage-level PVS in order to showcase how this hybridization benefits the conventional widely adopted grid type when control is applied in terms of frequency support. There are many studies that also focus on the concept of Virtual Synchronous Machine (VSM) [
48] and Grid-Forming Control (GFC), which is indeed the future of PV systems; however, GFM control is not the focus of this particular paper. This proposed approach has the capability of covering a wide range of power applications stretching from those involving a few kilowatts to larger applications operating at the power level of hundreds of kilowatts. The aim is to address some of the services that are ancillary to the frequency response, such as SIR and PFR activities, etc., but not to target any other high-energy intensive services such as load shifting, peak saving, etc. due to the limited storage capacity. The novel contributions of the paper are outlined below for the reader’s convenience:
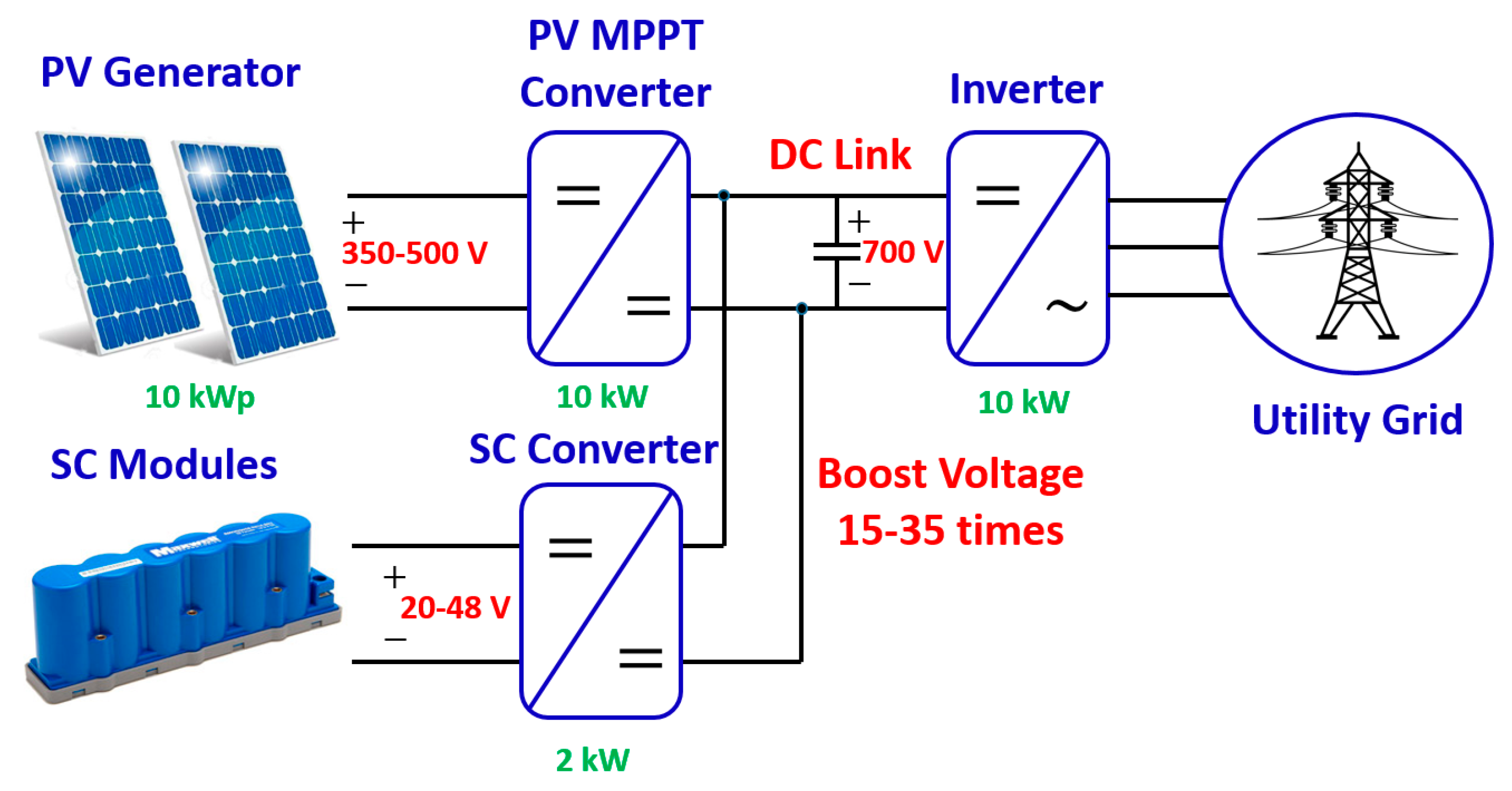
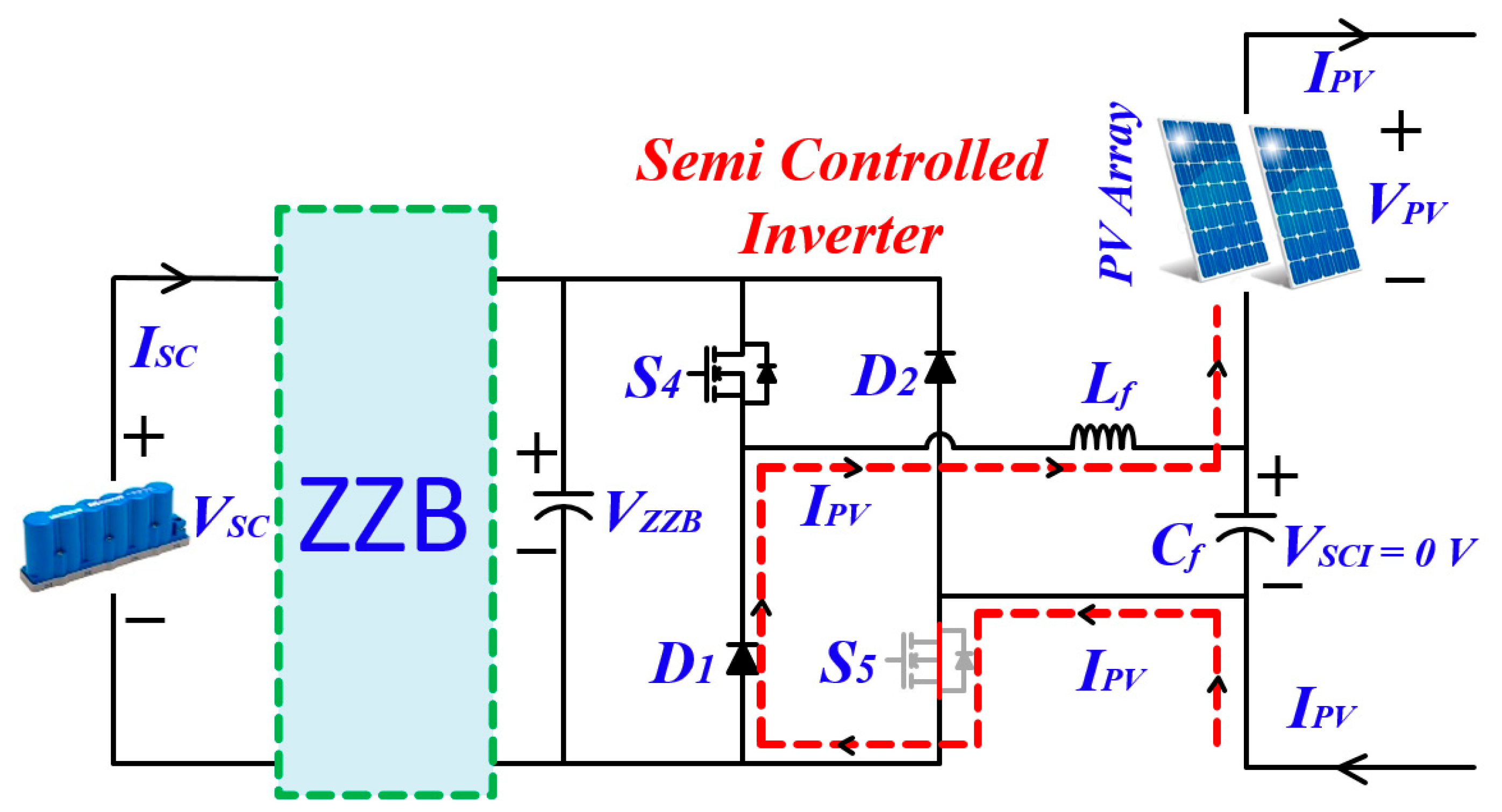
Topological innovation: The proposed “PV-SC Series Cascade Topology” represents a pioneering approach to interface a low-voltage SC to a medium-/high-voltage PVS, which, unlike its counterparts, eliminates the need for a high gain complex isolated converter for the SC Power-Processing Stage (SC-PPS).
Innovation in Control: Firstly, the proposed “Droop Inspired” method offers a means of emulating dynamic inertia as a function RoCoF. The target is to serve a wider range of RoCoF with a limited storage. Secondly, the novel single PI controller-based decoupling method effectively segregates the control of two-level SC-PPS in order to operate the SC as a voltage source rather than as a current source. A combined control scheme is also used to address both the SIR and the PFR.
Innovation in methodology for sizing: A very simple approach is proposed for the sizing of the SC and its PPS using a novel “Three Point Linearization” method for the PFR and the “Droop Inspired” method for the SIR.
The paper is organized into the following sections.
Section 2 details the working principle of the proposed PSCT. A brief explanation of the frequency response activities is given, and this is followed by a discussion of the proposed DI-method-based dynamic inertia concept in
Section 3. In
Section 4, the implemented control schemes are discussed to in terms of the degree to which they fulfil their objectives. In
Section 5 the sizing of the SC-based storage is covered based on the proposed DI and TPL methods. The whole concept is verified in
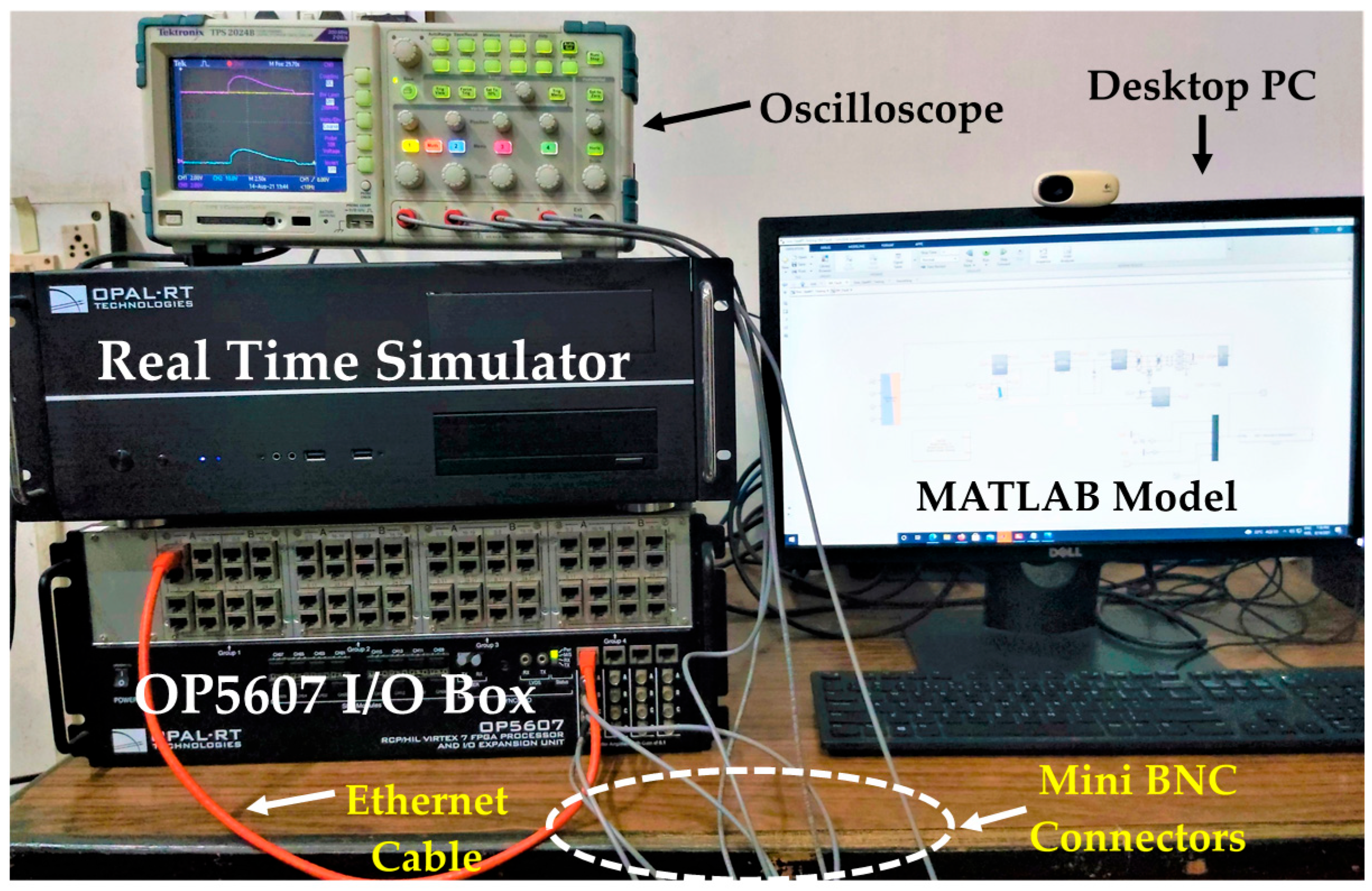
Section 6 for various case studies, using MATLAB Simulink, and then validated using the OPAL-RT-based real-time simulator. Finally,
Section 7 offers conclusions regarding the issues discussed in the paper.
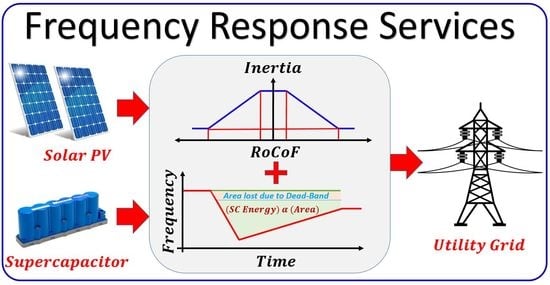
3. Frequency Response Services in PVS and the Proposed DI Dynamic Inertia Emulation
Frequency regulation is an essential part of the power system to arrest the post-disturbance frequency fluctuation within the acceptable range, and thus, to improve the resiliency of the system. In a conventional power system, frequency regulation occurs as a spontaneous response of the entire connected rotating machines post-disturbance, irrespective of their location, due to the inherent mechanical inertia. The inertia constants of the state-of-the-art rotational generators mostly fall within the range of 2 s to 6.5 s [
4], which is sufficient to contain the initial post-disturbance frequency changes before the other slow-frequency control mechanisms take over the job. Meanwhile, due to inertia being a form of resistance that opposes the changes in the frequency of the system, the higher the inertia constant of the system, the better the system’s stability. Hence, this is a minimum requirement of power systems that they should poses in order to assure their resiliency. However, due to the continuous replacement of synchronous generators by power electronics converter-based DERs, which have either zero or negligible inherent inertia (the energy storing elements such as inductors and capacitors can provide small amounts of inertia), the power system experiences a rapid fall in the equivalent inertia. This concept can be well understood from Equation (1). If not taken care of beforehand, this could lead to catastrophic failures such as back-to-back blackouts. These occur due to the tripping of various relays related to load- and/or generation-shedding because of large-frequency fluctuations, higher RoCoF, deeper frequency nadirs, etc.
The frequency response service that any DER should provide is basically of two types: RoCoF or Inertial Response, and Primary Frequency Response. A brief overview of both frequency response services is given below.
3.1. Rate of Change of Frequency (RoCoF) Response
As per the IEEE 1547-2018 standards, “Inertial response, in which the DER active power is varied in proportion to the rate of change of frequency, is not required but is permitted. If Area EPS Operator and DER Operator mutually agree to use DER inertial response, the performance requirements should be coordinated with the regional reliability coordinator with due consideration of system dynamic oscillatory behavior.” If the frequency excursion is within the continuous operating region imposed by the grid operators, the DERs should modulate their active power output as per the RoCoF scenario. This is the case provided that the averaging magnitude of the RoCoF, which corresponds to an averaging window of at least 0.1 s, is within the limit of 2.0 Hz/s for PVS, which is consistent with the specifications of Category II type DERs.
The inertia response of the DERs can be emulated based on the RoCoF and by using the swing equation, as shown below:
where the term
indicates the RoCoF,
and
stand for the change in generation and load demand, respectively, and
defines the inertia constant of the system.
is the inertia response of the system in PU due to RoCoF, and
is the nominal frequency of the system. (Note: the
unit is treated in “sec” if other parameters are considered in “PU”).
3.2. Primary Frequency Response and Frequency-Droop (Frequency-Power) Capability of the DERs
The frequency response characteristics of a typical power system mainly consist of three parts, Primary Frequency Control, Secondary Control and Tertiary Control, as shown in
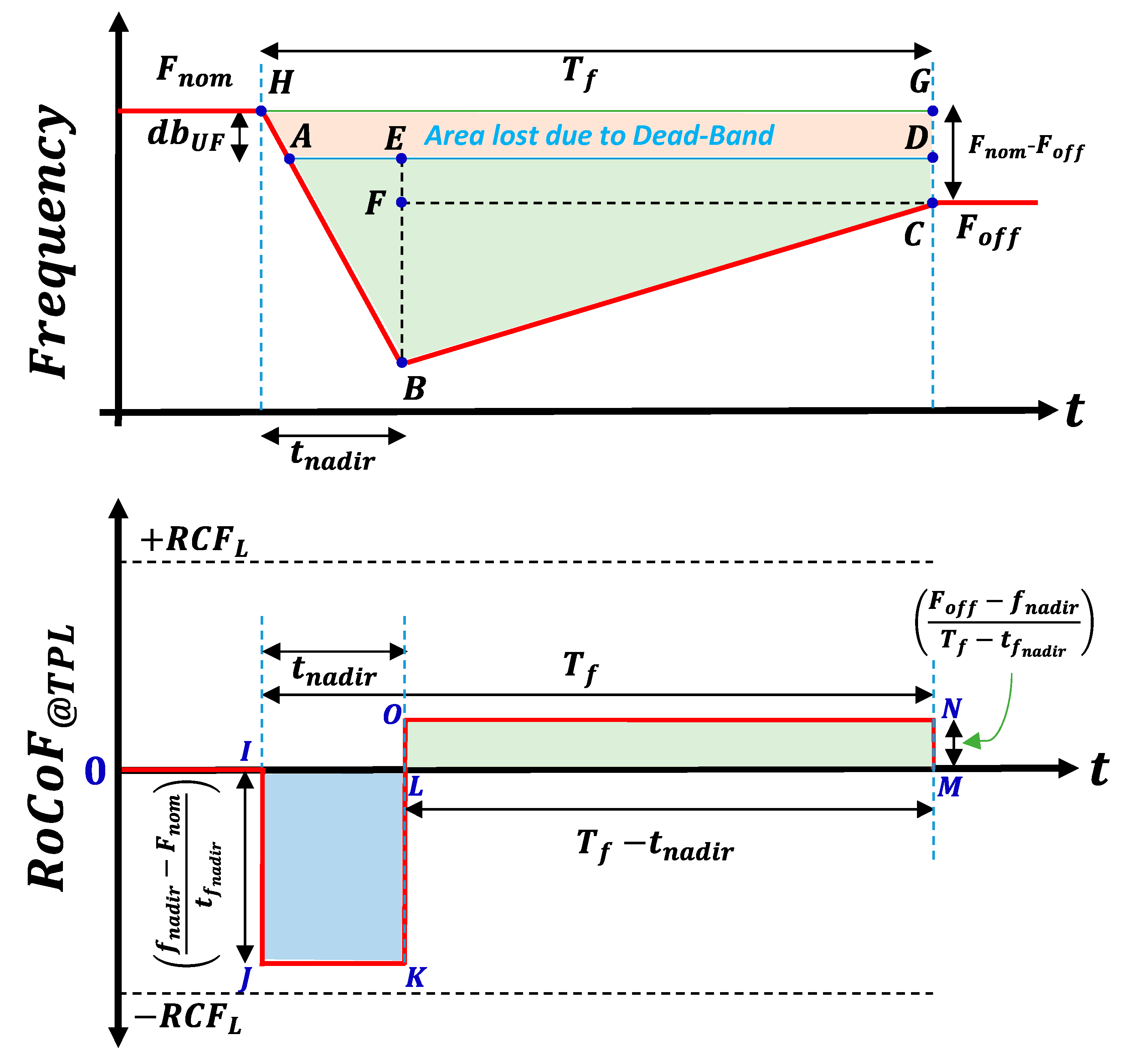
Figure 9. As the PFC is critical in terms of power system stability, it is the most important service. Therefore, for this paper, the topic of interest is PFC only and the SFC and TC will not be covered in detail. The PFC can further be divided into two subparts: the former inertial response and the latter governor response. In the case of conventional power systems, the initial RoCoF of the PFC characteristics, from the moment after the disturbance
until the point of the frequency nadir
, is limited by the inherent mechanical inertia of the system. However, the slow governor action comes into effect from the point of
until the point of offset frequency
to arrest the frequency within a certain range, denoted as
, which is specified by the regulator. The governor action provides the frequency support based on droop power control, which is very sluggish due to several practical constraints such as the Generation Rate Constraint (GRC), the Governor Dead Band (GDB), etc. [
50].
The IEEE 1547-2018 standards demand that during the temporary frequency fluctuation, if the frequency is outside of the adjustable deadband as per the standard, the DERs should modulate their active power output against the cause. In addition to the inertial response to the RoCoF, until (and unless) the frequency returns to within the specified deadband limits, the active power output should be regulated as per Equation (4), based on the typical Droop Control (DC) method, which is shown in
Figure 10.
where:
is the total active power output in the PU of the DER nameplate active power rating during the PFR event.
is the pre-disturbance power of the DER in the PU at the moment after the frequency crosses the dead band.
is available active power in the PU of the DER rating.
is the instantaneous system frequency.
corresponds to dead band of the droop control, and stands for the droop coefficient under-frequency events.
Similarly, the total absolute active power, which should be dealt by the DERs during PFR
, can be written as:
where
is the nominal power rating of the system and
and
are the absolute power contribution towards PFR considering the droop response and RoCoF response respectively.
The power mismatch in case of over-frequency PFR can be taken care of without additional energy storage just by curtailing the PV power generation by operating in the MPPT region. Thus, in this paper, the PFR of the PV-based DERs will be discussed only for the under-frequency phenomenon, which mostly happens because of a sudden increase in load demand.
3.3. Proposed Dynamic Inertia Emulation Based on Droop-Inspired Method for PVS
As indicated in Equation (3) of the previous sub section, the inertia response of the DERs for a specific RoCoF can be emulated using the concept of swing equation-like conventional generators. Therefore, if correlated with the power electronics-based DERs such as the PV-SC system, the same differential power should come from the SC and can be rewritten as:
where
is the absolute value of the power dealt by the SC storage unit.
In the case of the classical power system, the inertia constant offered by the state-of-the-art rotating machines is never a fixed value, but rather, a variable one. It strictly depends on its type, whether it is a thermal generator, tidal power generator or hydropower generating unit. The capacity of the plant is also major factor to decide the value of that particular generating unit. Therefore, it is very crucial to select an appropriate value of for the PVS such that it will behave in a similar or better way compared its classical counterparts while arresting the frequency disturbances. Moreover, as, there are no such standards imposed by the national and/or international grid codes, which specify the values of that the DERs should emulate, the flexibility in the hands of the designer to select the parameters freely, but this flexibility is constrained by the power- and energy-handling capability of the available/targeted storage.
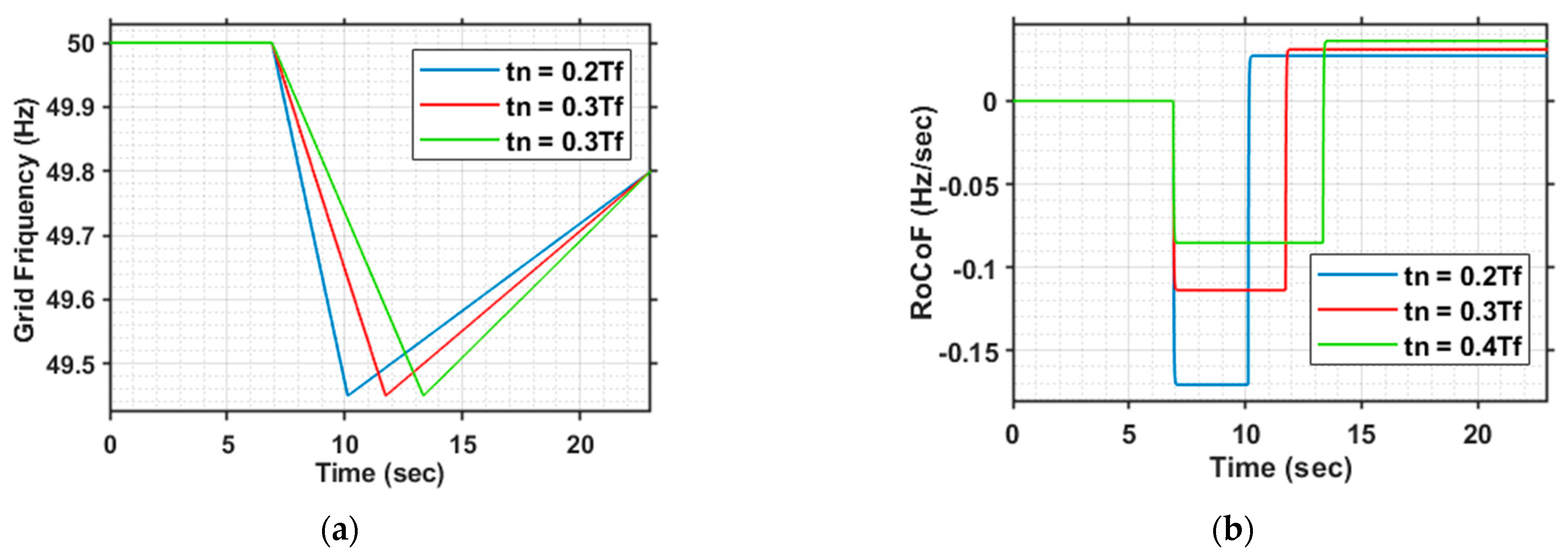
Here, the authors proposed a novel Droop-Inspired (DI) method, which assumes a range of values for the inertia constant (
to
) to emulate dynamic inertia (
) for the PVS as a function of RoCoF, and thus, to utilize the available storage in a better way. The aim was to achieve better inertia response during low-RoCoF periods (
) by subjecting the system to higher
values (
=
), where
should be higher than the maximum inertia offered by any alternators in scale. This will help to achieve a better grip in terms of arresting the frequency disturbance in a faster way at the root level itself in order to avoid the very real possibility of larger-scale future catastrophes. However, during comparatively higher RoCoF, the same cannot be expected due to the limitation in the available power and/or energy from the storage unit. So, during medium level RoCoF (
), the system can be subjected to variable
values (
) as a linear function of RoCoF. Similarly, during high level RoCoF (
), the system can be subjected to lower
values (
=
) (but not lower than the lowest inertia type synchronous generators in terms of scale) to avoid unnecessary increases in the power and energy rating of the SC. Mathematically,
can be expressed as:
The proposed DI method is shown in
Figure 11, where
and
are high and low values of the inertia constant set by the designer and
and
are the high and low values of the RoCoF that the system should take care of.
The advantages of the proposed dynamic inertia, based on the DI method, as compared to fixed inertia are better justified through the following points:
- 1.
The conventional constant inertia-based approach (a narrow range of RoCoF will be serviced):
In standard practice, the storage is mostly sized based on the worst case RoCoF the system is designed to target, and is subject to the virtual inertia constant the designer has set for the system. Therefore, in the case of constant inertia emulation methods:
During low-RoCoF periods, the reference power and energy demanded by the control are proportionately less and, hence, are dealt by the storage. This underutilizes the storage although it is capable enough of dealing with more power and energy. Thus, smaller disturbances may lead to larger frequency fluctuation, making the system less robust.
On the contrary, during high-RoCoF periods, the maximum RoCoF that can be addressed is also limited to the storage capability as the corresponding power and energy demands are high for the same inertia constant.
The above two issues motivated the authors to come up with the concept of the adjustable inertia.
- 2.
The proposed adjustable inertia-based approach (capable of addressing a wider range of RoCoF values with limited storage capability compared to its conventional counterparts):
During low-RoCoF periods, the proposed method helps in emulating comparatively larger inertia than that of the Synchronous Machines in terms of scale (such as: thermal generators, pumped storage types, open cycle gas turbines, etc. [
4]). Thus, it utilizes the storage capability to a large extent, allowing the storage to deal with more power and energy fluctuation (but within the limits of its capability). This will help in curbing the frequency fluctuation at the root level itself. Thus, an extreme frequency fluctuation and, in turn, an anticipated grid failure can be avoided.
However, we cannot expect similar performance (larger inertia emulation) during high-RoCoF periods as it will ultimately demand larger storage size. Thus, the control is designed in such a way that it ensures minimum inertia (not less than that of the class of synchronous generators with the lowest inertia-emulating capabilities such as: hydro turbines and combined cycle-type generating stations etc. [
4]).
Thus, the proposed approach justifies its superiority over the classical constant inertia-based approaches in terms of both making the grid frequency more stable and utilizing a smaller storage space for a wider range of RoCoF values (), with an adjustable inertia varying from ( to ) s in PU.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}