
The Use of a Real-Time Simulator for Analysis of Power Grid Operation States with a Wind Turbine


Abstract
1. Introduction
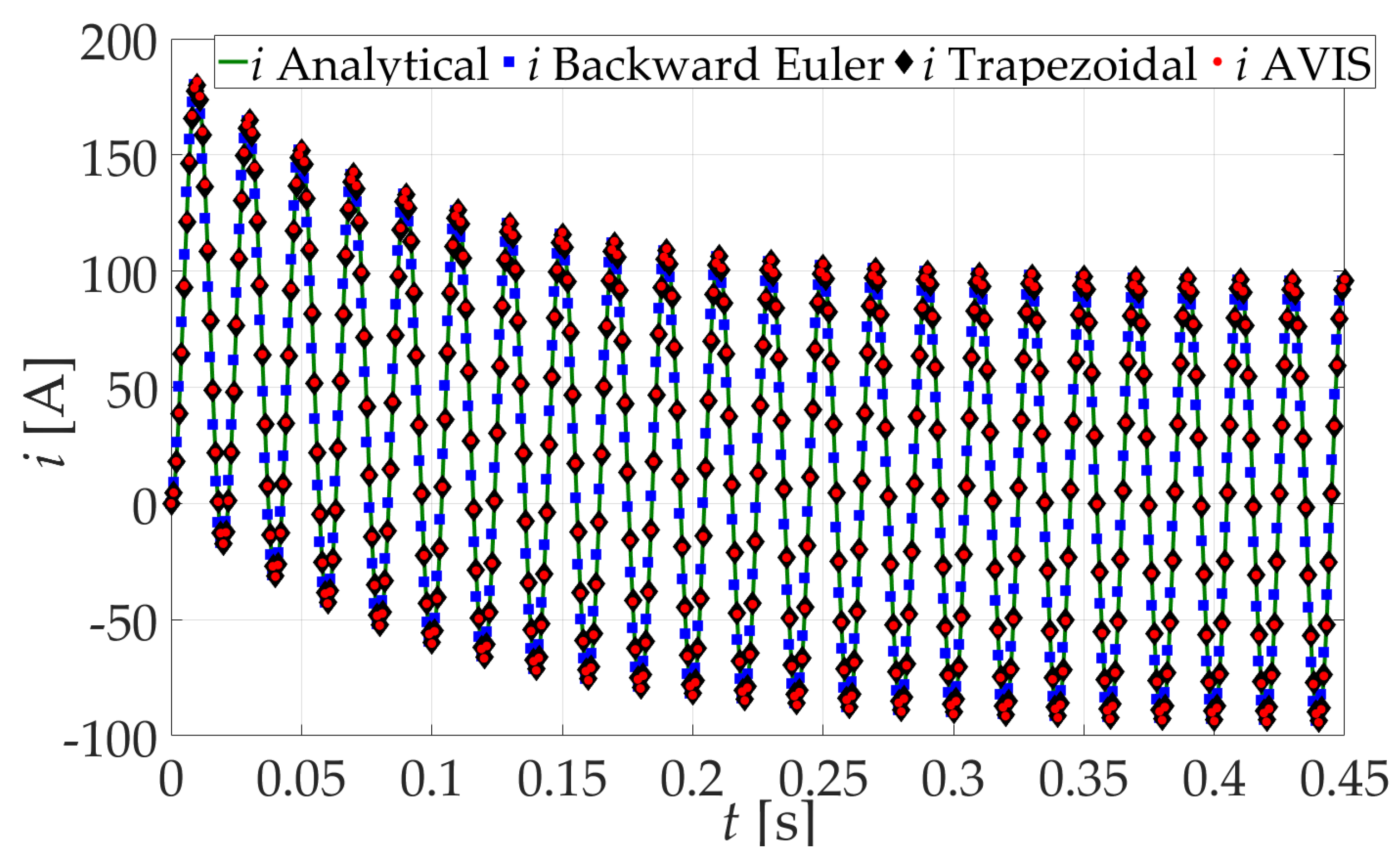
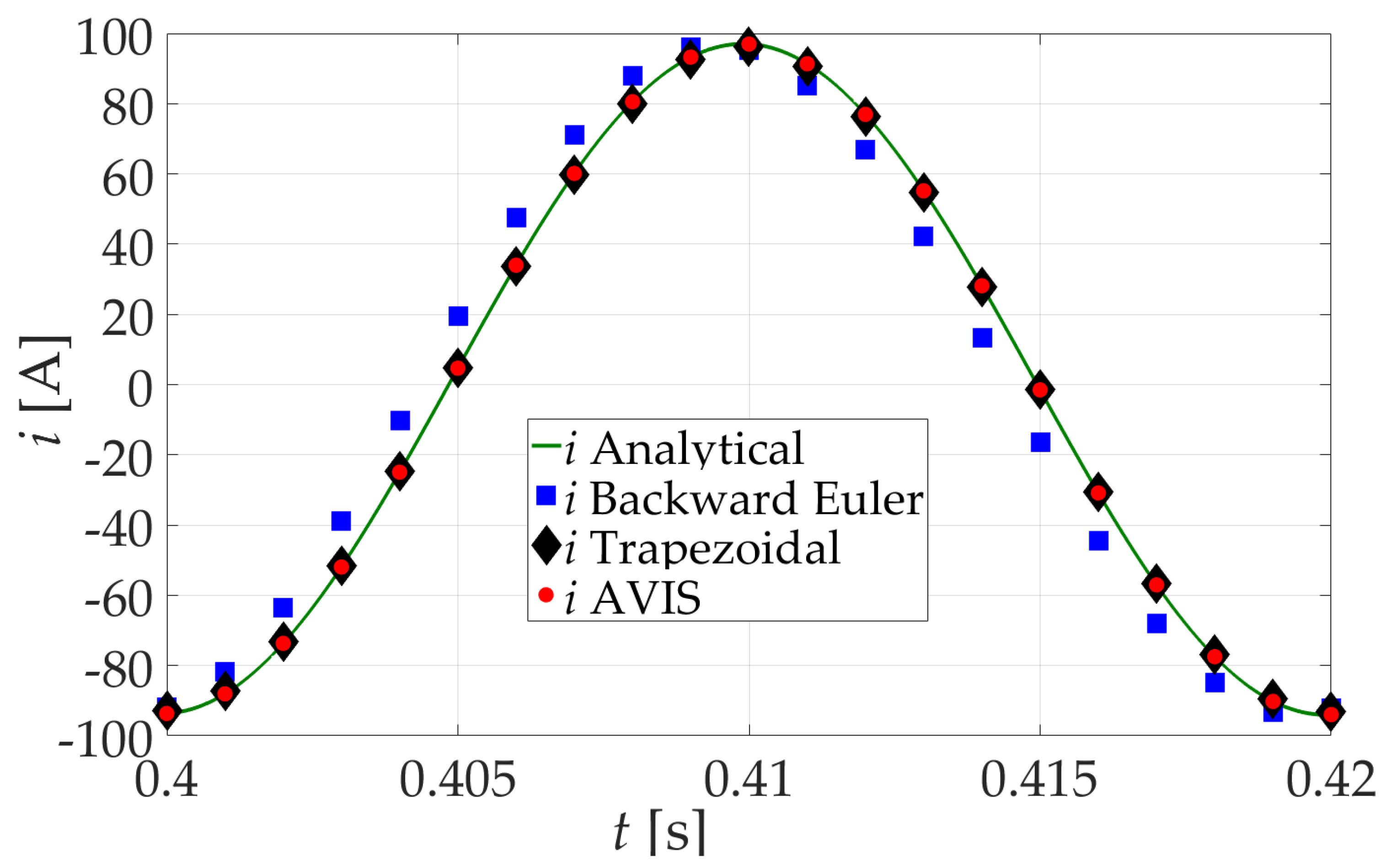
2. Accuracy Assessment of the New Method for Approximation of Differential Equations
3. Simulation of the Operating States of a Power Transformer
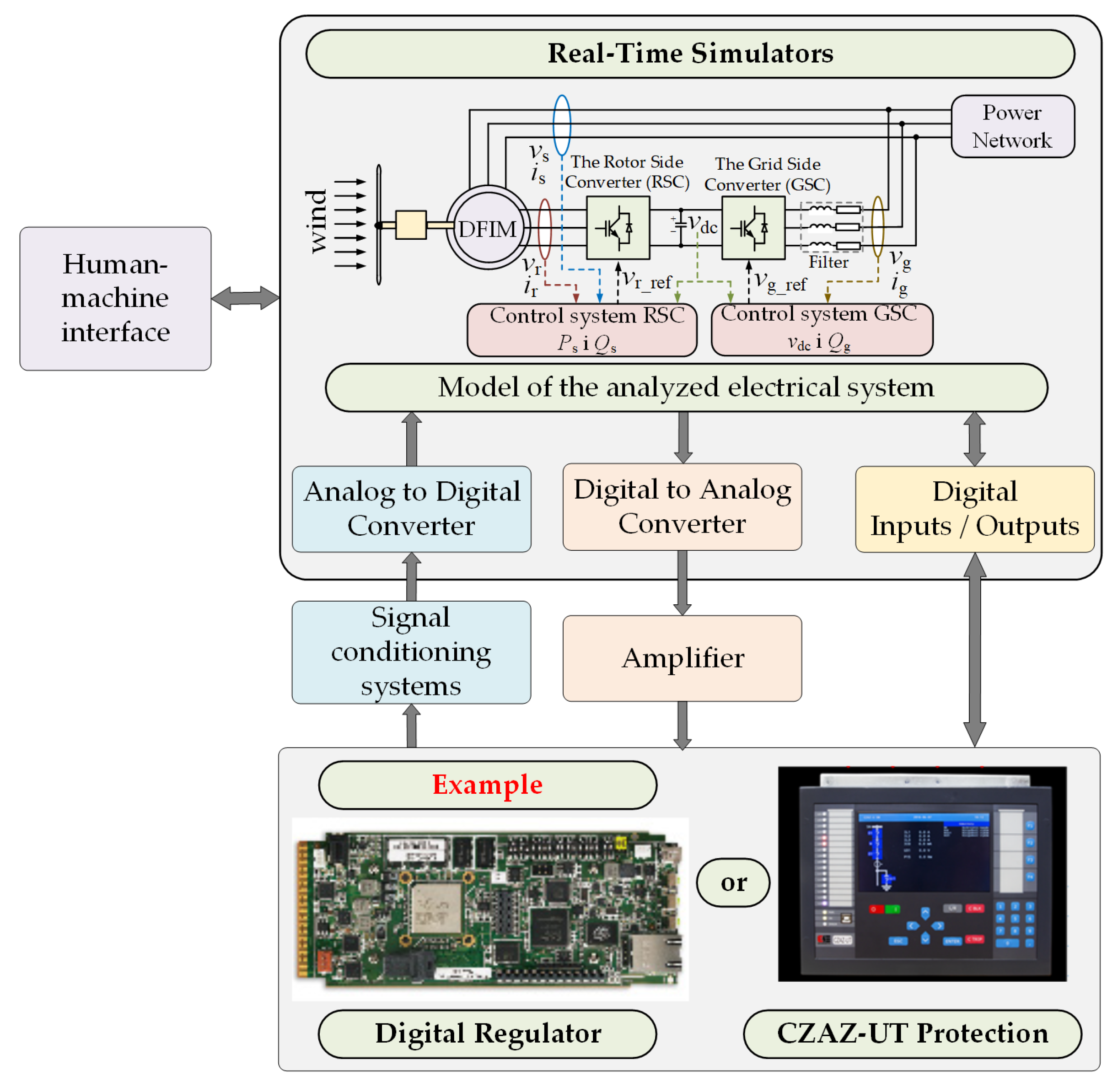
4. Real-Time Simulator of a MV Power Line with a Wind Farm
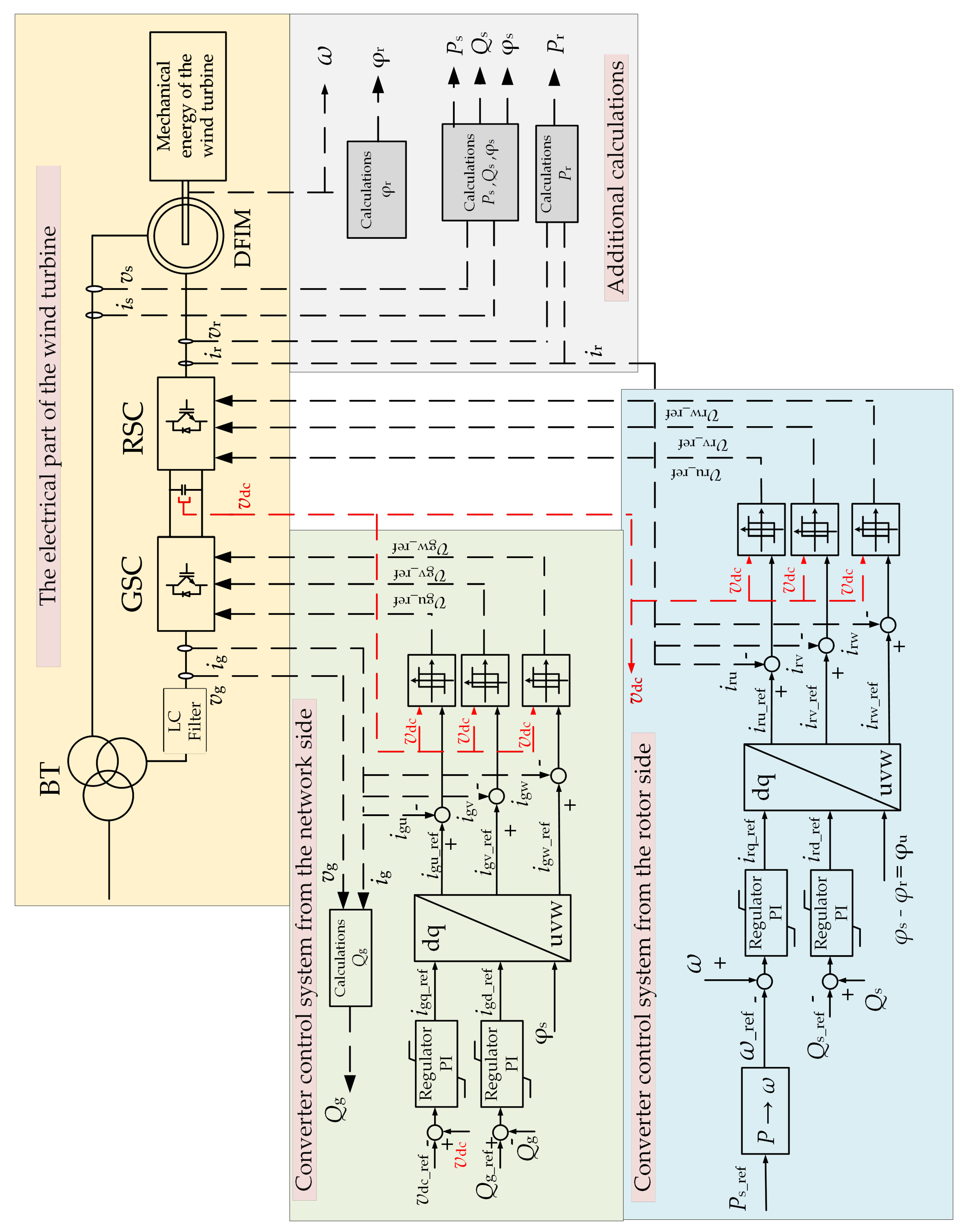
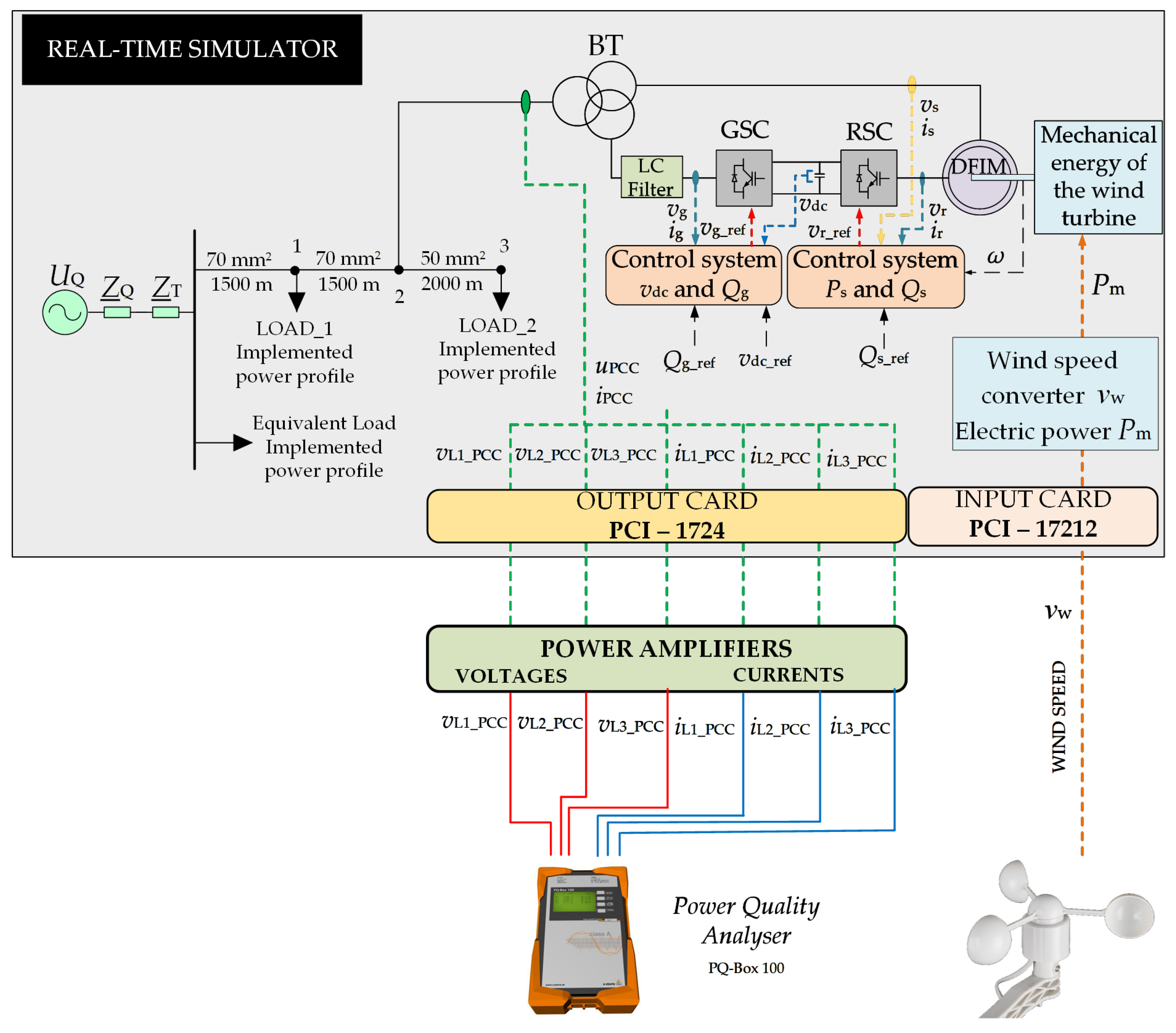
4.1. Description of the Analyzed Case
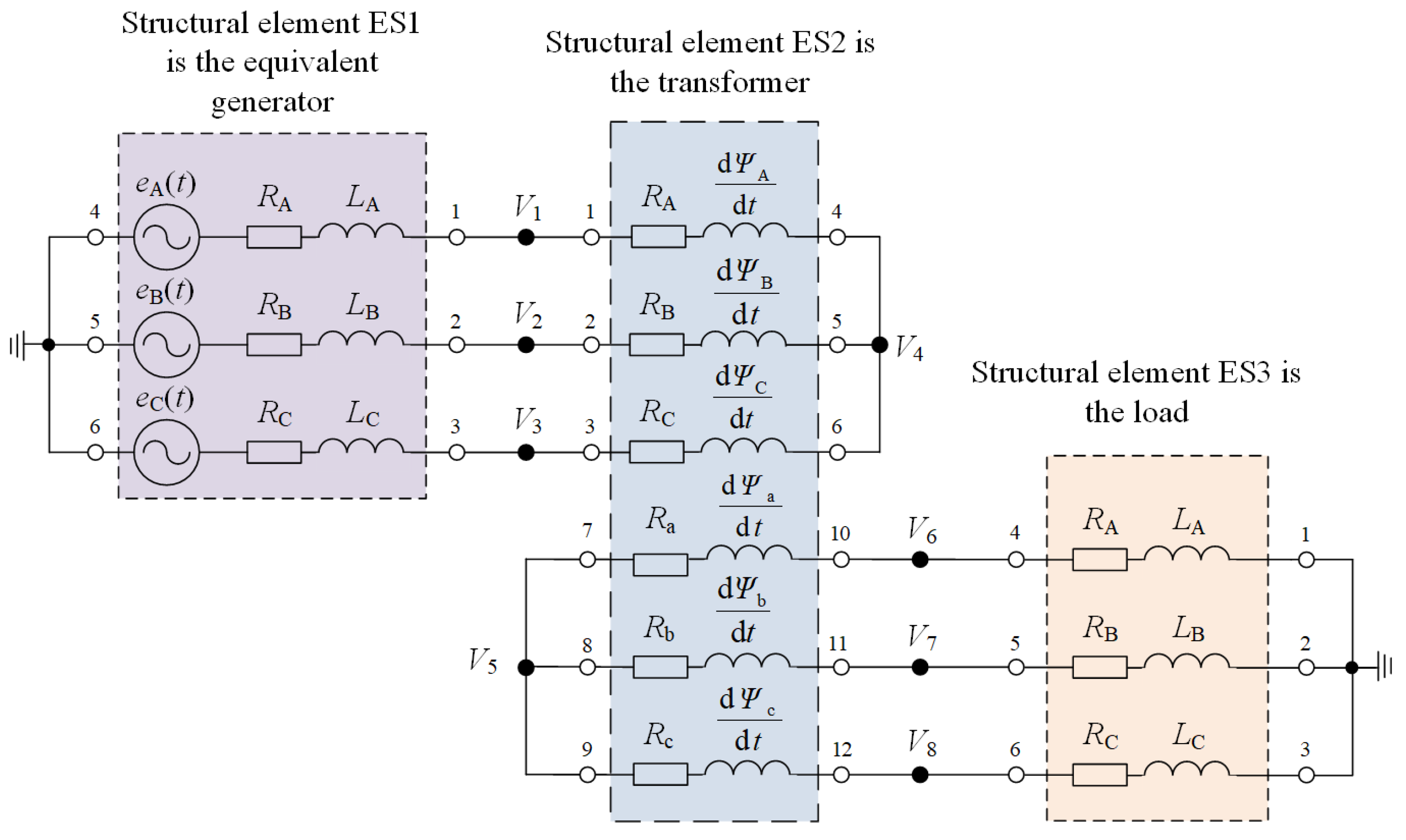
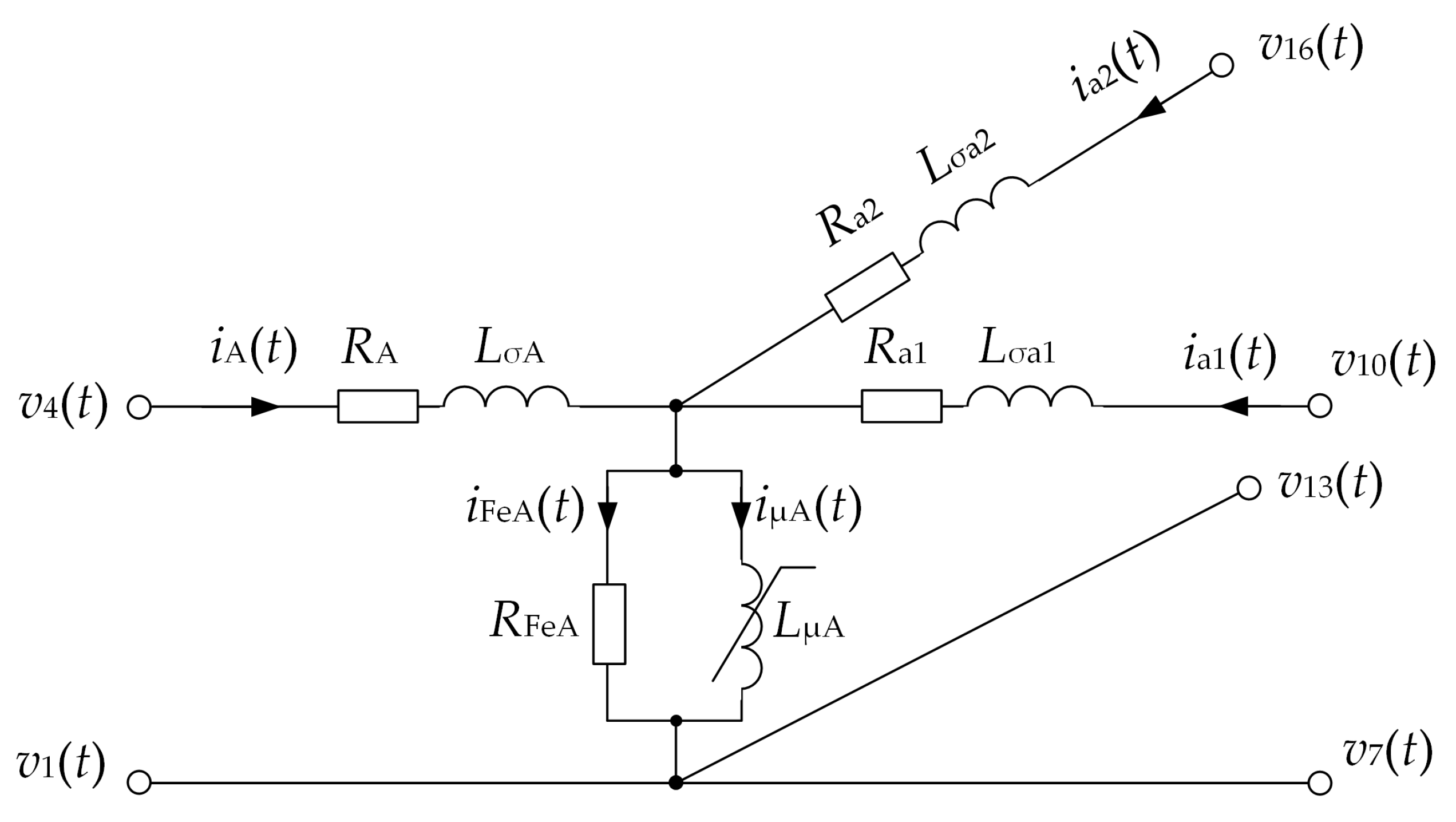
4.2. Mathematical Model of the Analyzed Network Fragment
- using the backward Euler method, a matrix of magnetizing currents is determined at the end of the integration step,
- knowing the values of the column matrix of magnetizing currents at the moment determines the magnetic inductance of the magnetic circuit in each phase.
- the matrix of the current flowing through the transformer windings is calculated for the time instant , using the Equation (11),
- for the magnetization inductance determined from the prediction described above, a matrix of estimated magnetizing currents is calculated in each phase using the appropriately transformed upper relationship in the Equation (8),
- the estimated magnetization inductances in each phase are calculated using the formula , where ,
- the modified values of the magnetizing currents are calculated in each transformer phase in a way that ensures meeting the conditions arising from the fact that the products of current and inductance at times and are equal,
- values of corrected magnetizing currents and magnetizing inductance in each phase determined for time are used in the next calculation step.
5. Experimental Studies of Real-Time Simulator Work
5.1. Description of the Experiment
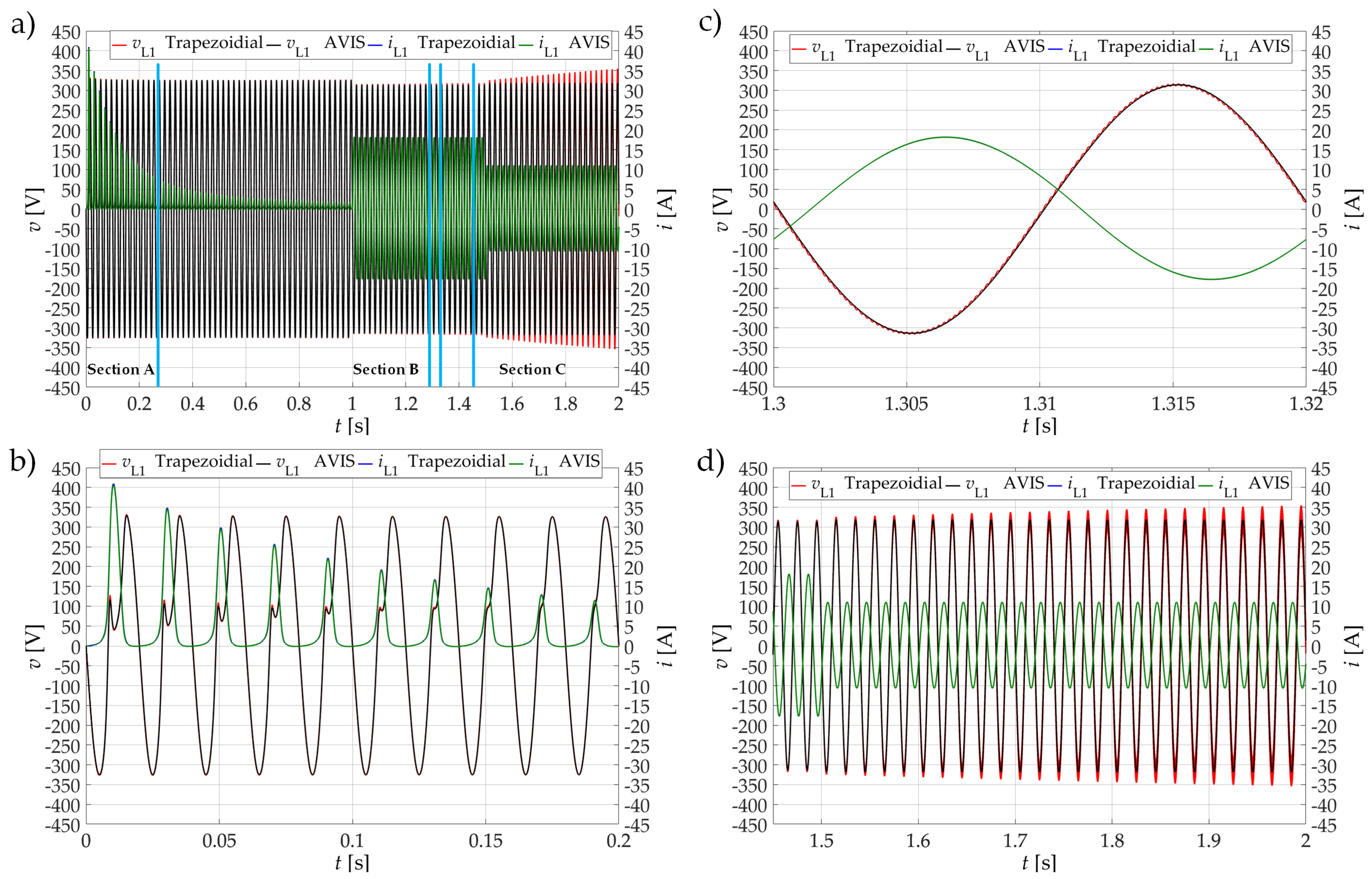
5.2. Test Results
6. Conclusions
- the demand for real-time simulators will increase, covering areas limited only to a part of the power system, i.e., MV power distribution networks or even only to single (or several) power lines,
- competitive solutions will be sought in terms of costs, both investment and operating costs,
- solutions that are uncomplicated in terms of installation and operation will be sought.
- the use of the new AVIS method of algebraizing differential equations, which is based on average voltages in the integration step, allows real-time simulation with a large integration step of 0.2 ms in period of one week while maintaining appropriate accuracy of results,
- the comparison of frequency responses in the RL system with three methods (the known backward Euler and trapezoidal methods and the new AVIS method) in a wide frequency range up to the Nyquist frequency per unit showed that the AVIS method practically does not introduce magnitude or phase error, which is an advantage of this method over two others that are recommended by other authors,
- the effectiveness of the AVIS method allows for a “return” to real-time simulators based on personal computers,
- the use of the AVIS method for real-time simulation with integration step of 0.2 ms of a relatively complex power system (network fragment, three-winding transformer, double-powered induction machine and control system), implemented in the classic PC with classic operating system, allows for stable real-time simulations in a relatively long time (continuously for seven days), taking into account changes and events inside and outside the simulator.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AVIS | Average Voltages in the Integration Step |
References
- Uriarte, F.M. Multicore Simulation of Power System Transients; The Institution of Engineering and Technology: London, UK, 2013. [Google Scholar]
- Popovici, K.; Mosterman, P.J. Real-Time Simulation Technologies. Principles, Methodologies and Applications; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2013. [Google Scholar]
- Laplante, P.A. Real-Time Systems Design and Analysis, 3rd ed.; IEEE Press, Wiley-Interscience: New York, NY, USA, 2004. [Google Scholar]
- Mughal, A.M. Real Time Modeling, Simulation and Control of Dynamical Systems; Springer International Publishing: Switzerland, Cham, 2016. [Google Scholar]
- Bayoumi, M. An FPGA-Based Real-Time Simulator for the Analysis of Electromagnetic Transients in Electrical Power Systems. Ph.D. Thesis, Department of Electrical and Computer Engineering, University of Toronto, Toronto, ON, Canada, 2009. [Google Scholar]
- Kłosowski, Z. Real-Time Simulation of Electric Power Network with Wind Turbine. Ph.D. Thesis, Faculty of Electrical and Control Engineering, Gdańsk University of Technology, Gdansk, Poland, 2019. (In Polish). [Google Scholar]
- Fajfer, M. Parallel computing in the simulation of the electric circuit with the use of DSP. Ph.D. Thesis, Faculty of Electrical Engineering, Poznań University of Technology, Poznan, Poland, 2019. (In Polish). [Google Scholar]
- Adegbohun, F.R.; Lee, K.Y. Real-time modeling, simulation and analysis of a grid connected PV system with hardware-in-loop protection. In Proceedings of the North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017. [Google Scholar]
- Kang, C.; Feng, X.; Yongjie, F.; Yuehai, Y. Comparative simulation of dynamic characteristics of Wind Turbine Doubly-Fed Induction Generator based on RTDS and MATLAB. In Proceedings of the International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010. [Google Scholar]
- Ofoli, A.R.; Altimania, M.R. Real-time digital simulator testbed using eMEGASim for wind power plants. In Proceedings of the 2017 IEEE Industry Applications Society Annual Meeting, Cincinnati, OH, USA, 1–5 October 2017. [Google Scholar]
- Achary, S.B.; Mishra, S.; Kumar, A. Real time hardware in loop testing of single phase grid connected PV system. In Proceedings of the 2014 Eighteenth National Power Systems Conference(NPSC), Guwahati, India, 18–20 December 2014. [Google Scholar]
- Dufour, C.; Abourida, S.; Belanger, J. InfiniBand-Based Real-Time Simulation of HVDC, STATCOM and SVC Devices with Custom-Of-The-Shelf PCs and FPGAs. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006. [Google Scholar]
- Derouich, A.; Lagrioui, A. Real-Time Simulation and analysis of the Induction machine performances operating at flux constant. Int. J. Adv. Comput. Sci. Appl. 2014, 5. [Google Scholar] [CrossRef]
- Umashankar, S.; Bhalekar, M.; Chandra, S.; Vijayakumar, D.; Kothari, D.P. DSP Based Real Time implementation of AC-DC-AC converter Using SPWM Technique. Int. J. Electron. Commun. Electr. Eng. 2013, 3, 96–113. [Google Scholar]
- Fajfer, M. Medium voltage electrical system research using DSP-based real-time simulator. Comput. Appl. Electr. Eng. 2014, 12, 334–352. [Google Scholar]
- Tarakanath, K.; Agarwal, V.; Yadav, P. Hardware in the loop simulation of direct synthesis based two degree of freedom PID control of DC-DC boost converter using Real Time Digital Simulation in FPGA. In Proceedings of the 2014 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Mumbai, India, 16–19 December 2014. [Google Scholar]
- Li, P.; Wang, Z.; Wang, C.; Fu, X.; Yu, H.; Wang, L. Synchronisation mechanism and interfacesdesign of multi-FPGA-based real-time simulator for microgrids. IET Gener. Transm. Distrib. 2017, 11. [Google Scholar] [CrossRef]
- Estrada, L.; Vázquez, N.; Vaquero, J.; de Castro, Á.; Arau, J. Real-Time Hardware in the Loop Simulation Methodology for Power Converters Using LabVIEW FPGA. Energies 2020, 13, 373. [Google Scholar] [CrossRef]
- Smolarczyk, A.; Kowalik, R.; Bartosiewicz, E.; Rasolomampionona, D. A simple real-time simulator for protection devices testing. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Cavtat, Croatia, 13–16 May 2014. [Google Scholar]
- Kłosowski, Z. The analysis of the possible use of wind turbines for voltage stabilization in the power node of MV line with the use of a real-time simulator. Przegląd Elektrotechniczny 2015, 1, 20–27. (In Polish) [Google Scholar]
- Cieślik, S. A PC-based real-time computer simulator of electric power system cooperated with real excitation system. In Proceedings of the XIX Symposium Electromagnetic Phenomena in Nonlinear Circuits, Maribor, Slovenia, 28–30 June 2006. [Google Scholar]
- Plachtyna, O.; Kutsyk, A. A hybrid model of the electrical power generation system. In Proceedings of the 2016 10th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Bydgoszcz, Poland, 29 June–1 July 2016. [Google Scholar]
- Espinoza, R.G.F.; Molina, Y.; Tavares, M. PC Implementation of a Real-Time Simulator Using ATP Foreign Models and a Sound Card. Energies 2018, 11, 2140. [Google Scholar] [CrossRef]
- Kłosowski, Z.; Cieślik, S. Stability Analysis of Real-Time Simulation of a Power Transformer’s Operating Conditions. Acta Energetica 2018, 2, 31–38. [Google Scholar]
- Watson, N.R.; Arrillaga, J. Power Systems Electromagnetic Transients Simulation; Series 39; IET Power and Energy: London, UK, 2007. [Google Scholar]
- Martinez-Velasco, J.A. Transient Analysis of Power Systems: Solution Techniques, Tools and Applications; IEEE Press Wiley: Chichester, UK, 2015. [Google Scholar]
- Dommel, H.W. Electromagnetic Transients Program Theory Book; Bonneville Power Administration: Portland, OR, USA, 1995. [Google Scholar]
- Marti, J.R.; Lin, J. Suppresion of Numerical Oscillations in the EMTP. IEEE Trans. Power Syst. 1989, 2, 739–747. [Google Scholar] [CrossRef]
- Araujo, A.E. Numerical Instabilities in Power System Transient Simulation. Ph.D. Thesis, Faculty of Graduate Studies Electrical Engineering, University of British Columbia, Vancouver, BC, Canada, 1993. [Google Scholar]
- Plakhtyna, O. Numerical One-Step Method of Electric Circuits Analysis and Its Application in Electromechanical Tasks. Sci. J. Kcharkov Tech. Univ. 2008, 30, 223–225. (In Ukrainian) [Google Scholar]
- Kłosowski, Z.; Cieślik, S. Real-Time Simulation of Power Conversion in Doubly Fed Induction Machine. Energies 2020, 13, 673. [Google Scholar] [CrossRef]
- Kłosowski, Z.; Plakhtyna, O.; Grugel, P. Applying the method of average voltage on the integration step length for the analysis of electrical circuits. Zesz. Nauk. Elektrotechnika 2014, 17, 17–31. [Google Scholar]
- Plakhtyna, O.; Kutsyk, A.; Semeniuk, M.; Kuznyetsov, O. Object-oriented program environment for electromechanical systems analysis based on the method of average voltages on integration step. In Proceedings of the 2017 18th International Conference on Computational Problems of Electrical Engineering (CPEE), Kutna Hora, Czech Republic, 11–13 September 2017. [Google Scholar]
- Płachtyna, O.; Bastian, B.; Kutsyk, A. Real time computer tester for automatic voltage regulators used in marine generators. Ponzań Univ. Technol. Acad. J. Electr. Eng. 2016, 85, 465–476. [Google Scholar]
- Płachtyna, O.; Kłosowski, Z.; Żarnowski, R. Mathematical model of DC drive based on a step-averaged voltage numerical method. Przegląd Elektrotechniczny 2011, 87, 51–56. (In Polish) [Google Scholar]
- Plakhtyna, O.; Kutsyk, A.; Semeniuk, M. Real-Time Models of Electromechanical Power Systems, Based on the Method of Average Voltages in Integration Step and Their Computer Application. Energies 2020, 13, 2263. [Google Scholar] [CrossRef]
- Plakhtyna, O.; Kutsyk, A.; Semeniuk, M. An analysis of fault modes in an electrical power-generation system on a real-time simulator with a real automatic excitation controller of a synchronous generator. Elektrotehniski Vestnik/Electrotech. Rev. 2019, 86, 104–109. [Google Scholar]
- Liu, J.; Wei, T.; Liu, J.; Wei, Z.; Hou, J.; Xiang, Z. Suppression of numerical oscillations in power system electromagnetic transient simulation via 2S-DIRK method. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 465–476. [Google Scholar]
- Qaio, W. Dynamic modeling and control of double fed induction generators driven by wind turbines. In Proceedings of the IEEE/PES Power Systems Conference and Exposition, Seattle, WA, USA, 20 March 2009. [Google Scholar]
- Wu, G.; Lee, K.Y.; Young, W. Modeling and control of power conditioning system for grid-connected fuel cell power plant. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 22–26 July 2013. [Google Scholar]
- Ponick, B. Über den Einfluß der Hauptfeldsättigung auf Ausgleichsvorgänge elektrischer Antriebe und eine einfache Methode zu ihrer Berücksichtigung. Archiv für Elektrotechnik 1993, 76, 369–376. [Google Scholar] [CrossRef]
- Ronkowski, M. Circuits-Oriented Models of Electrical Machines for Simulation of Converter Systems; Gdansk University of Technology: Gdansk, Poland, 1995. [Google Scholar]
- Przychodzień, A. Virtual Power Plants—Types and Development Opportunities. Rynek Energii 2020, 5, 68–74. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rule | H(s) | H(z) |
|---|---|---|
| Backward Euler | ||
| Trapezoidal | ||
| AVIS |
| Rated power | 10 kVA | Percentage impendace | 3% |
| Rated voltage primary | 380 V | Rated voltage secondary | 340 V |
| Primary current | 15 A | Secondary current | 17 A |
| Load loss | 220 W | No-load loss | 70 W |
| No-load current | 0.4 A | Frequency | 50 Hz |
| Event Number | Date and Time of the Event | Duration of the Event | Description |
|---|---|---|---|
| 1 | 17.10.2018, p.m. | 0.2 s | Short-circuit between L2 and L3 phases in LOAD_2 |
| 2 | 18.10.2018, a.m. | 1.0 s | Reduction of the supply voltage amplitude in the L1 phase (up to 60% of the output voltage) |
| 3 | 19.10.2018, a.m. | 0.2 s | Short-circuit between L1 and L2 phases in LOAD_1 |
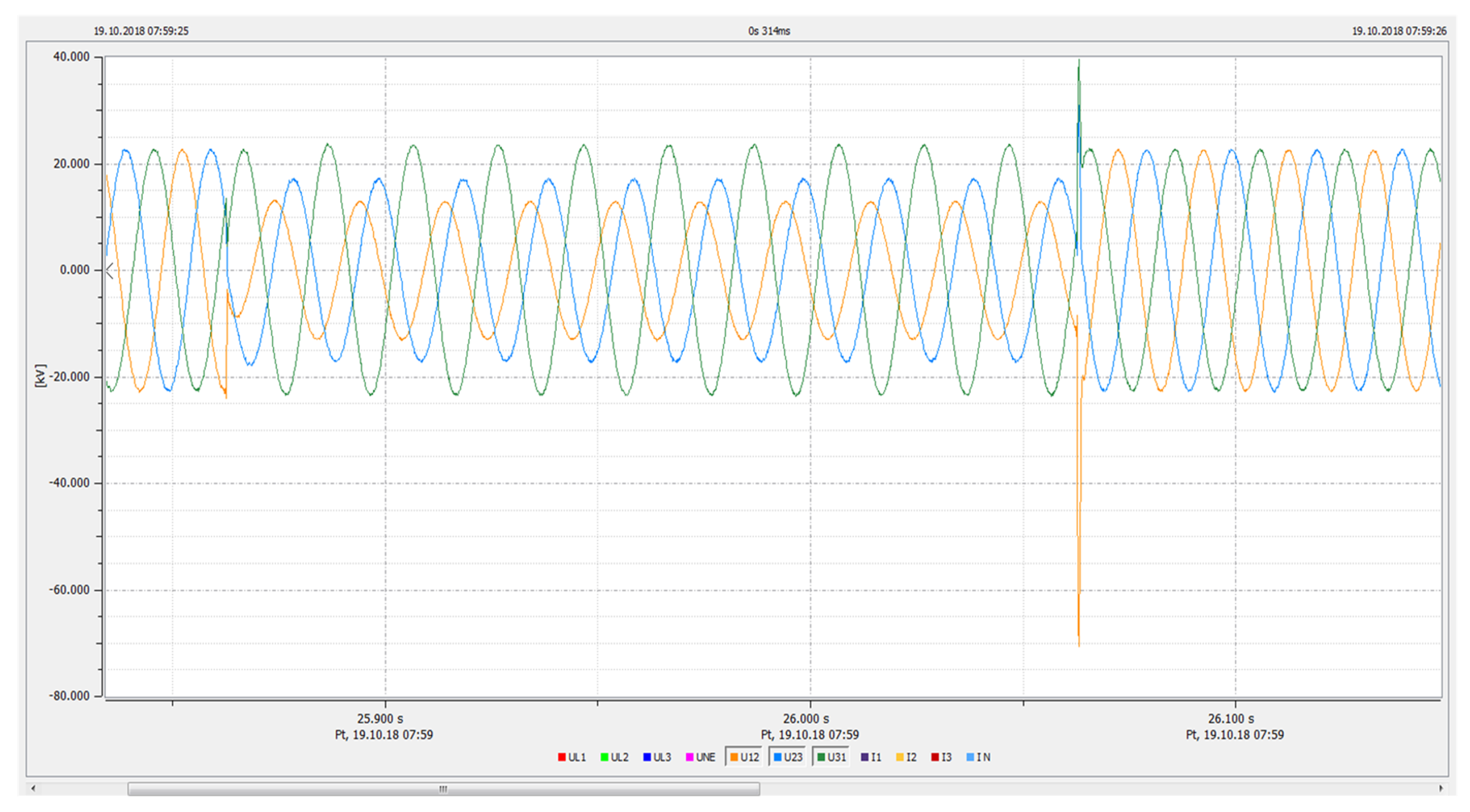
| 4 | 19.10.2018, p.m. | 0.15 s | Ground fault in the medium voltage line in phase L1. It occurred at the connection point of the wind turbine to the power grid |
| 5 | 20.10.2018, p.m. | 0.15 s | Ground fault in the medium voltage line in phase L1. It occurred at the connection point of LOAD_2 to the power grid |
| 6 | 21.10.2018, p.m. | 1.0 s | Reduction of the supply voltage amplitude in all three phases (up to 80% of the output voltage) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kłosowski, Z.; Cieślik, S. The Use of a Real-Time Simulator for Analysis of Power Grid Operation States with a Wind Turbine. Energies 2021, 14, 2327. https://doi.org/10.3390/en14082327
Kłosowski Z, Cieślik S. The Use of a Real-Time Simulator for Analysis of Power Grid Operation States with a Wind Turbine. Energies. 2021; 14(8):2327. https://doi.org/10.3390/en14082327
Chicago/Turabian StyleKłosowski, Zbigniew, and Sławomir Cieślik. 2021. "The Use of a Real-Time Simulator for Analysis of Power Grid Operation States with a Wind Turbine" Energies 14, no. 8: 2327. https://doi.org/10.3390/en14082327
APA StyleKłosowski, Z., & Cieślik, S. (2021). The Use of a Real-Time Simulator for Analysis of Power Grid Operation States with a Wind Turbine. Energies, 14(8), 2327. https://doi.org/10.3390/en14082327