
Increasing Electric Vehicles Reliability by Non-Invasive Diagnosis of Motor Winding Faults




Abstract
1. Introduction
2. Approach
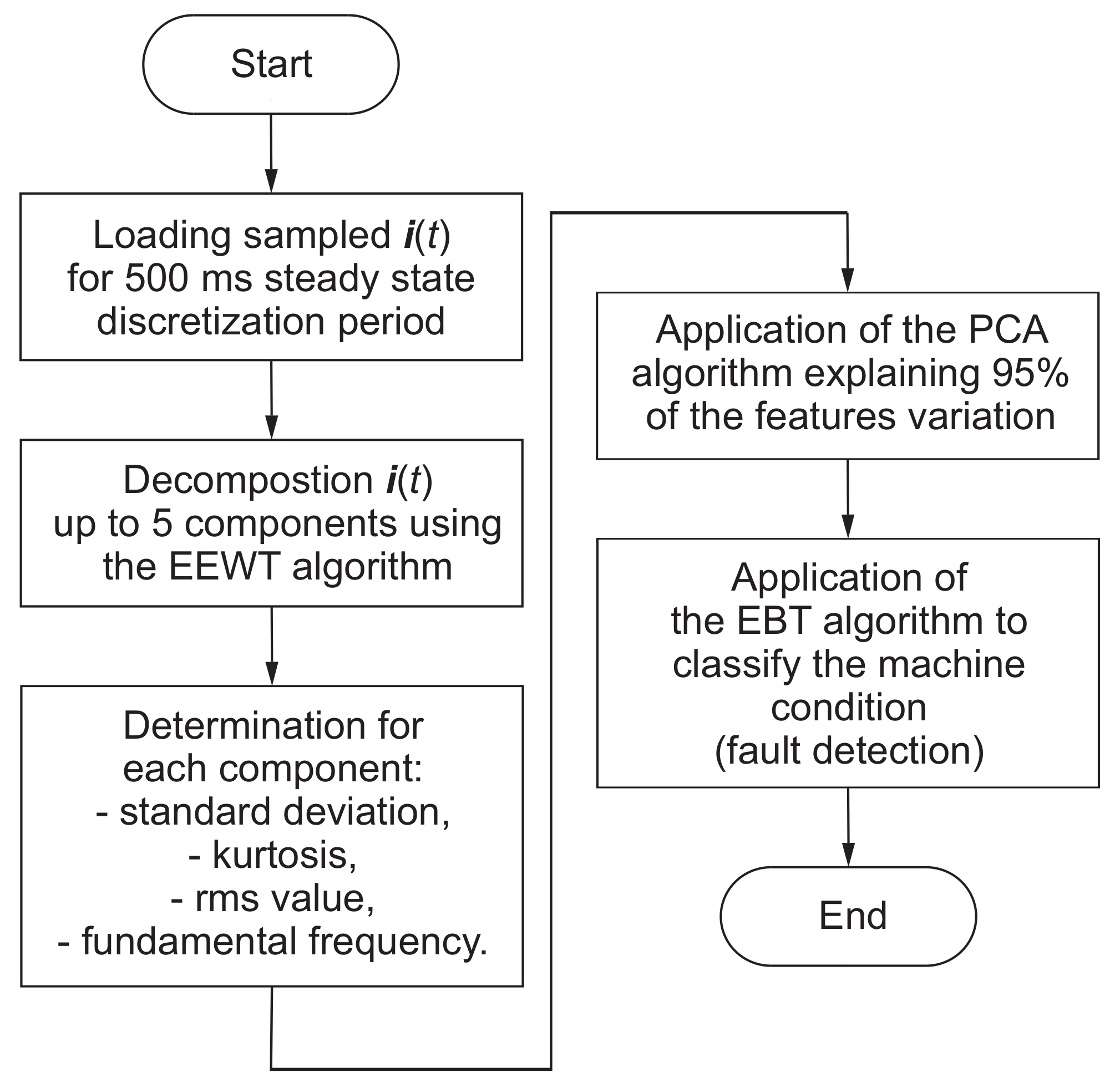
2.1. Proposed Algorithm for the Motor Winding Fault Diagnosis
2.2. Feature Extraction with EEWT Decomposition
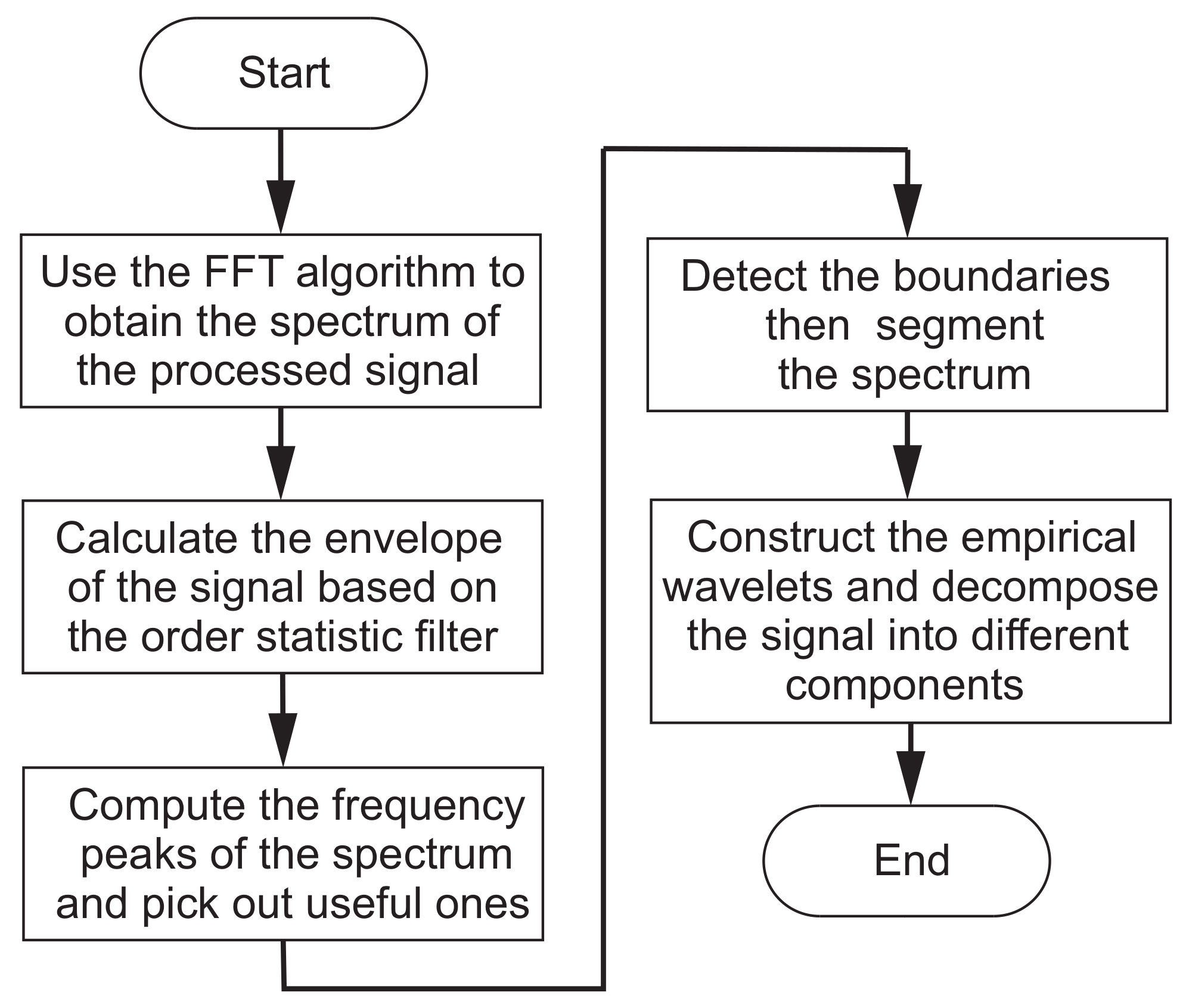
2.2.1. The EEWT Algorithm
- The use of Fast Fourier Transform (FFT) to determine the spectrum of the analyzed signal.
- The calculation of the upper envelope of the analyzed signal using the Order Statistical Filter (OSF). In the enhanced method (in relation to the EWT method), the envelope is used to identify the trend of spectrum variation.
- The determination of spectrum frequency peaks from the designated envelope and selection of useful ones based on the following criteria: (a) the width of a flat top cannot be shorter than the the order statistics filter size; (b) the most representative flat top in the neighbor ones is picked out; (c) the useful flat tops do not appear in the downtrend of the analyzed signal spectrum.
- The calculation of the spectrum segmentation boundaries based on flat tops obtained in step 3.
- The construction of the empirical scaling function and empirical wavelet as in the EWT method, and the decomposition of the analyzed signal into component signals.
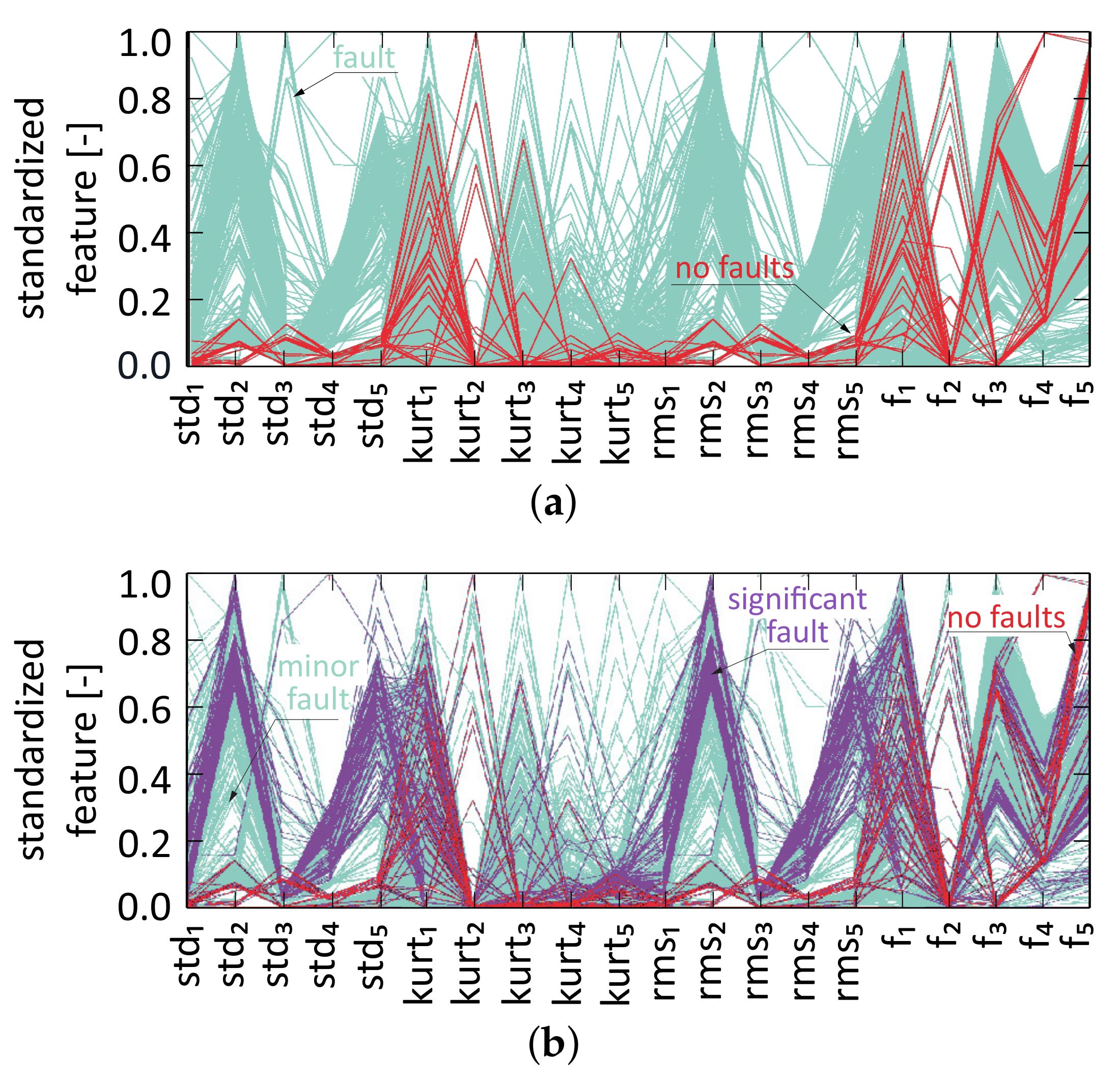
2.2.2. Feature Extraction Based on Component Signals
2.3. Classification Block with Ensemble Bagged Trees
- For each class and each tree , predict computes , which is the estimated posterior probability of class c given observation x using tree t. C is the set of all distinct classes in the training data.
- Predict computes the weighted average of the class posterior probabilities over the selected trees.
- The predicted class is the class that yields the largest weighted average.
3. Dataset and Validation
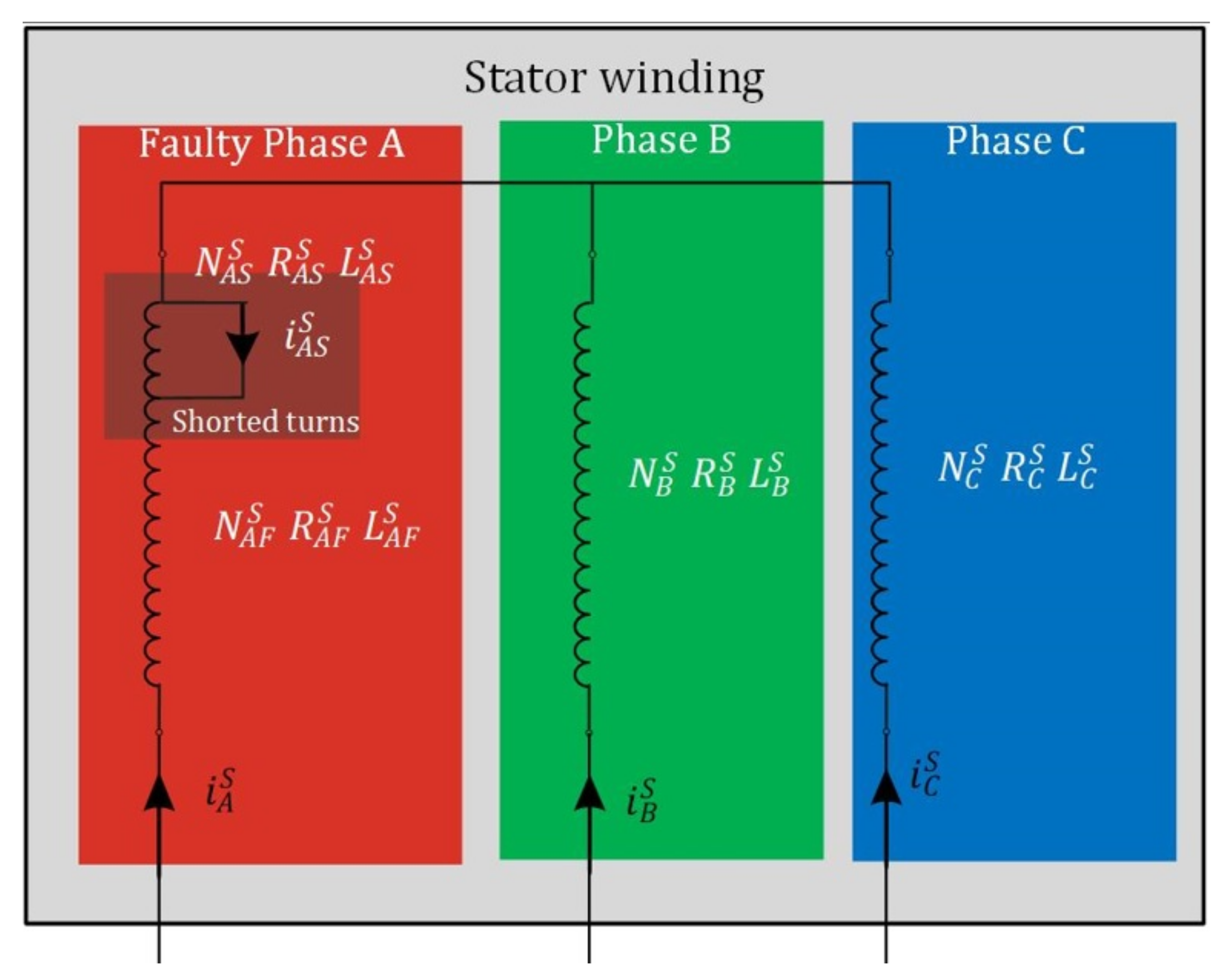
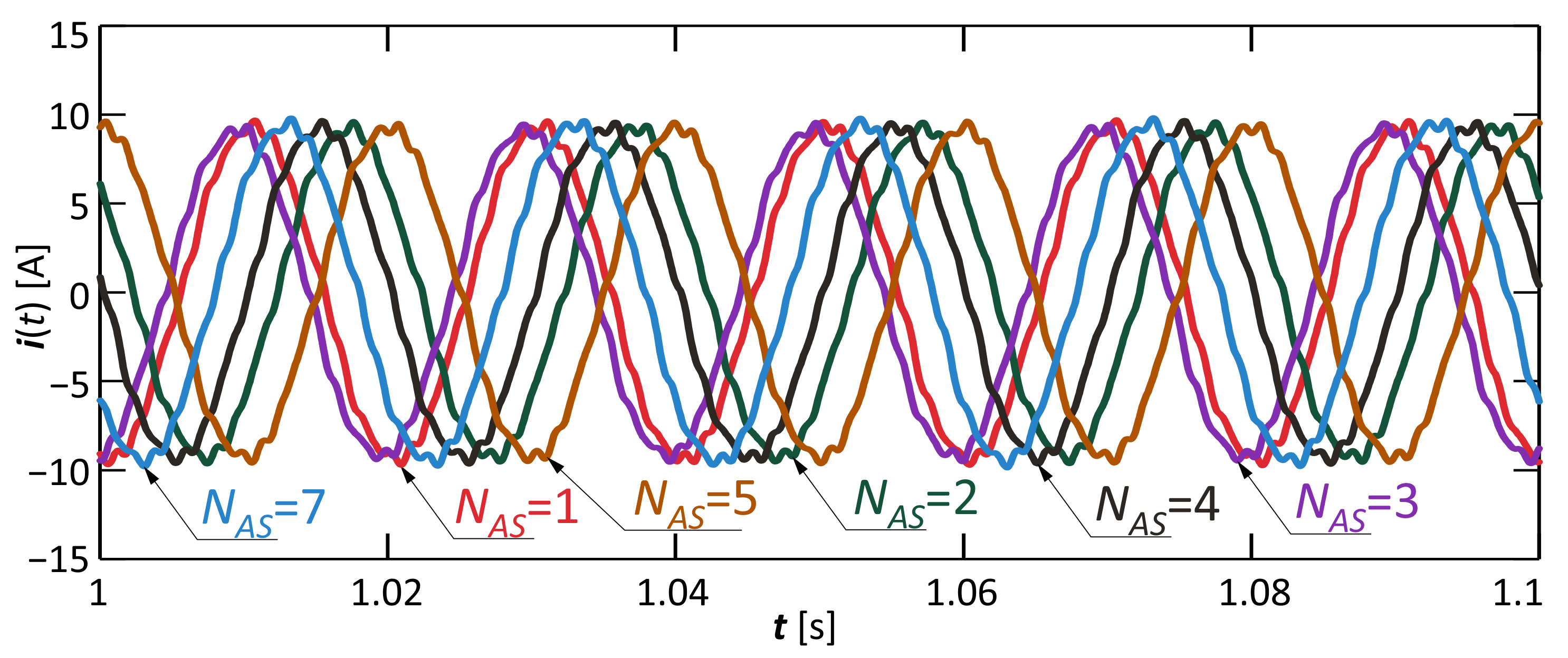
3.1. Dataset Obtained from Numerical Simulations
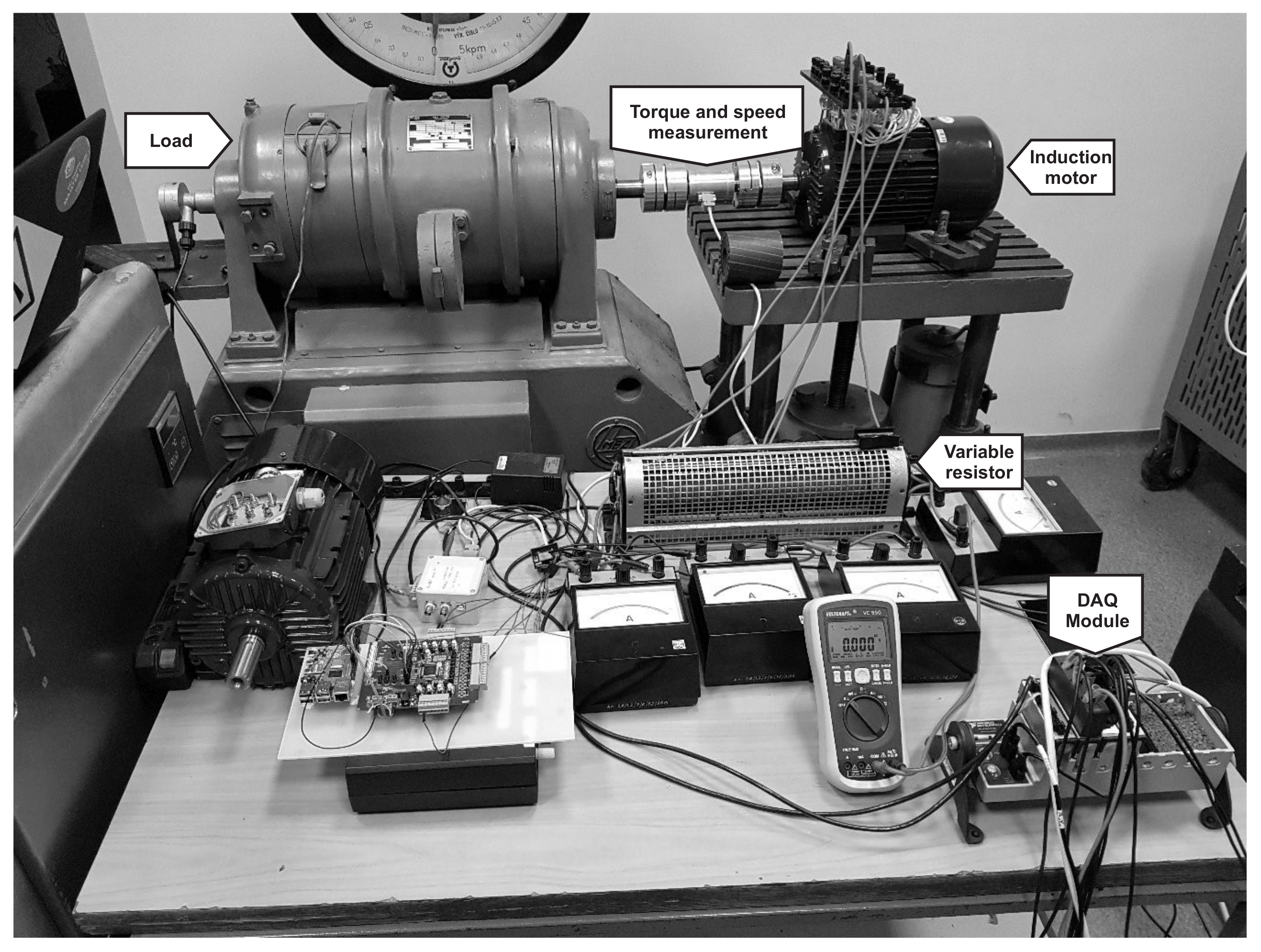
3.2. Dataset Obtained from Experimental Studies
3.3. Validation of the Proposed Approach to the Motor Winding Fault Diagnosis
- Fine, Medium and Coarse Tree;
- Linear, Quadratic, Cubic Support Vector Machine (SVM);
- Fine, Medium, Coarse Gaussian Support Vector Machine (SVM);
- Fine, Medium, Coarse, Cosine, Cubic and Weighted kNN;
- Ensemble Bagged and RUSBoosted Trees;
- Ensemble Subspace Discriminant;
- Ensemble Subspace kNN.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ojaghi, M.; Sabouri, M.; Faiz, J. Performance Analysis of Squirrel-Cage Induction Motors Under Broken Rotor Bar and Stator Inter-Turn Fault Conditions Using Analytical Modeling. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Delgado-Prieto, M.; Osornio-Rios, R.A.; de Jesus Romero-Troncoso, R. Multifault Diagnosis Method Applied to an Electric Machine Based on High-Dimensional Feature Reduction. IEEE Trans. Ind. Appl. 2017, 53, 3086–3097. [Google Scholar] [CrossRef]
- Yang, T.; Pen, H.; Wang, Z.; Chang, C.S. Feature Knowledge Based Fault Detection of Induction Motors Through the Analysis of Stator Current Data. IEEE Trans. Instrum. Meas. 2016, 65, 549–558. [Google Scholar] [CrossRef]
- Ojaghi, M.; Aghmasheh, R.; Sabouri, M. Model-based exact technique to identify type and degree of eccentricity faults in induction motors. IET Electr. Power Appl. 2016, 10, 706–713. [Google Scholar] [CrossRef]
- Boudinar, A.H.; Benouzza, N.; Bendiabdellah, A.; Khodja, M. Induction Motor Bearing Fault Analysis Using a Root-MUSIC Method. IEEE Trans. Ind. Appl. 2016, 52, 3851–3860. [Google Scholar] [CrossRef]
- Abdallah, H.; Benatman, K. Stator winding inter-turn short-circuit detection in induction motors by parameter identification. IET Electr. Power Appl. 2017, 11, 272–288. [Google Scholar] [CrossRef]
- Surya, G.N.; Khan, Z.J.; Ballal, M.S.; Suryawanshi, H.M. A Simplified Frequency-Domain Detection of Stator Turn Fault in Squirrel-Cage Induction Motors Using an Observer Coil Technique. IEEE Trans. Ind. Electron. 2017, 64, 1495–1506. [Google Scholar] [CrossRef]
- Aswad, R.A.; Jassim, B.M. Open-circuit fault diagnosis in three-phase induction motor using model-based technique. Arch. Electr. Eng. 2020, 69, 815–827. [Google Scholar] [CrossRef]
- Dhamal, S.S.; Bhatkar, M.V. Modelling and Simulation of Three-Phase Induction Motor to Diagnose the Performance on Inter-Turn Short Circuit Fault in Stator Winding. In Proceedings of the 2018 International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 28–29 September 2018; pp. 1166–1172. [Google Scholar] [CrossRef]
- Berzoy, A.; Mohamed, A.A.S.; Mohammed, O. Impact of Inter-Turn Short-Circuit Location on Induction Machines Parameters Through FE Computations. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Zouzou, S.E.; Sahraoui, M.; Ghoggal, A.; Guedidi, S. Detection of inter-turn short-circuit and broken rotor bars in induction motors using the Partial Relative Indexes: Application on the MCSA. In Proceedings of the XIX International Conference on Electrical Machines (ICEM 2010), Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Ojaghi, M.; Mohammadi, M. Unified Modeling Technique for Axially Uniform and Nonuniform Eccentricity Faults in Three-Phase Squirrel Cage Induction Motors. IEEE Trans. Ind. Electron. 2018, 65, 5292–5301. [Google Scholar] [CrossRef]
- Berzoy, A.; Mohamed, A.A.S.; Mohammed, O. Complex-Vector Model of Interturn Failure in Induction Machines for Fault Detection and Identification. IEEE Trans. Ind. Appl. 2017, 53, 2667–2678. [Google Scholar] [CrossRef]
- Pietrowski, W.; Gorny, K. Analysis of Torque Ripples of an Induction Motor Taking into Account a Inter-Turn Short-Circuit in a Stator Winding. Energies 2020, 13, 3626. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Makhoba, K. Detection of inter-turn stator faults in induction motors using short term averaging of forwards and backwards rotating stator current phasors for fast prognostics. In Proceedings of the 2017 IEEE International Magnetics Conference (INTERMAG), Dublin, Ireland, 24–28 April 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Rangel–Magdaleno, J.; Peregrina–Barreto, H.; Ramirez–Cortes, J.; Morales–Caporal, R.; Cruz–Vega, I. Vibration Analysis of Partially Damaged Rotor Bar in Induction Motor under Different Load Condition Using DWT. Shock Vib. 2016, 2016, 3530464. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Marques Cardoso, A.J. Reliable Detection of Stator Inter-Turn Faults of Very Low Severity Level in Induction Motors. IEEE Trans. Ind. Electron. 2021, 68, 3475–3484. [Google Scholar] [CrossRef]
- Elbouchikhi, E.; Amirat, Y.; Feld, G.; Benbouzid, M. Generalized Likelihood Ratio Test Based Approach for Stator-Fault Detection in a PWM Inverter-Fed Induction Motor Drive. IEEE Trans. Ind. Electron. 2019, 66, 6343–6353. [Google Scholar] [CrossRef]
- Soufi, Y.; Bahi, T.; Harkat, M.F.; Merabet, H. Diagnosis and Detection of Short-Circuit in a Three-Phase Induction Machine. In Proceedings of the 2009 Second International Conference on Computer and Electrical Engineering, Dubai, United Arab Emirates, 28–30 December 2009; Volume 2, pp. 347–351. [Google Scholar] [CrossRef]
- Bouchareb, C.; Nait-Said, M.S. PMSM Model with Phase-to-Phase Short-Circuit and Diagnosis by ESA and EPVA. Adv. Electr. Electron. Eng. 2016, 14, 522–530. [Google Scholar] [CrossRef]
- Pietrowski, W.; Gorny, K. Detection of inter-turn short-circuit at start-up of induction machine based on torque analysis. Open Phys. 2017, 15, 851–856. [Google Scholar] [CrossRef]
- Fireteanu, V. Detection of the Short-Circuit Faults in the Stator Winding of Induction Motors based on Harmonics of the Neighboring Magnetic Field. J. Phys. Conf. Ser. 2013, 450, 012021. [Google Scholar] [CrossRef]
- Wang, B.; Wang, J.; Griffo, A.; Sen, B. Stator Turn Fault Detection by Second Harmonic in Instantaneous Power for a Triple-Redundant Fault-Tolerant PM Drive. IEEE Trans. Ind. Electron. 2018, 65, 7279–7289. [Google Scholar] [CrossRef]
- Skowron, M.; Wolkiewicz, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Effectiveness of Selected Neural Network Structures Based on Axial Flux Analysis in Stator and Rotor Winding Incipient Fault Detection of Inverter-fed Induction Motors. Energies 2019, 12, 2392. [Google Scholar] [CrossRef]
- Dash, R.N.; Subudhi, B. Stator inter-turn fault detection of an induction motor using neuro-fuzzy techniques. Arch. Control Sci. 2010, 20, 363–376. [Google Scholar] [CrossRef]
- Mohammed, A.; Melecio, J.I.; Djurovic, S. Stator Winding Fault Thermal Signature Monitoring and Analysis by In Situ FBG Sensors. IEEE Trans. Ind. Electron. 2019, 66, 8082–8092. [Google Scholar] [CrossRef]
- Baranski, M. FE analysis of coupled electromagnetic-thermal phenomena in the squirrel cage motor working at high ambient temperature. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2019, 38, 1120–1132. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Wolkiewicz, M.; Kowalski, C.T. Convolutional Neural Network-Based Stator Current Data-Driven Incipient Stator Fault Diagnosis of Inverter-Fed Induction Motor. Energies 2020, 13, 1475. [Google Scholar] [CrossRef]
- Nakamura, H.; Mizuno, Y. Method for Diagnosing a Short-Circuit Fault in the Stator Winding of a Motor Based on Parameter Identification of Features and a Support Vector Machine. Energies 2020, 13, 2272. [Google Scholar] [CrossRef]
- Kuwalek, P.; Burlaga, B.; Jesko, W.; Konieczka, P. Research on methods for detecting respiratory rate from photoplethysmographic signal. Biomed. Signal Process. Control 2021, 66, 102483. [Google Scholar] [CrossRef]
- Hu, Y.; Li, F.; Li, H.G.; Liu, C. An enhanced empirical wavelet transform for noisy and non-stationary signal processing. Dig. Signal Process. 2017, 60, 220–229. [Google Scholar] [CrossRef]
- Kuwalek, P. Estimation of Parameters Associated with Individual Sources of Voltage Fluctuations. IEEE Trans. Power Deliv. 2020, 36, 351–361. [Google Scholar] [CrossRef]
- Gilles, J. Empirical Wavelet Transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Kuwalek, P. AM Modulation Signal Estimation Allowing Further Research on Sources of Voltage Fluctuations. IEEE Trans. Ind. Electron. 2020, 67, 6937–6945. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Num Elements | Min Edge Length | Max Edge Length | RMS Edge Length | Min Elem. Area | Max Elem. Area | Mean Elem. Area | |
|---|---|---|---|---|---|---|---|
| Band | 627 | 0.000125 | 0.00197 | 0.000854 | |||
| Shaft | 96 | 0.00312 | 0.00613 | 0.00459 | |||
| Outer Region | 1737 | 0.000125 | 0.00589 | 0.00217 | |||
| Stator | 2161 | 0.000408 | 0.00615 | 0.00327 | |||
| Coil | 33 | 0.000897 | 0.0034 | 0.00239 | |||
| Rotor | 6300 | 0.000273 | 0.00582 | 0.00141 | |||
| Bar | 453 | 0.000273 | 0.000699 | 0.000499 | |||
| Bar Separate | 499 | 0.000273 | 0.000699 | 0.000473 | |||
| Coil Shorted | 7 | 0.0008 | 0.002 | 0.001194 |
| Method | PCA Not Applied | PCA Applied | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Accuracy | Sensitivity | Selectivity | Precision | F1 Score | Accuracy | Sensitivity | Selectivity | Precision | F1 Score | |
| Fine Tree | 98.7 | 95.8 | 99.1 | 95.8 | 94.5 | 98.6 | 97.2 | 98.8 | 97.2 | 94.3 |
| Medium Tree | 98.7 | 95.8 | 99.1 | 95.8 | 94.5 | 98.6 | 97.2 | 98.8 | 97.2 | 94.3 |
| Coarse Tree | 98.4 | 93.8 | 99.0 | 93.8 | 93.1 | 95.2 | 68.8 | 98.6 | 68.8 | 76.7 |
| Linear SVM | 95.6 | 91.7 | 96.2 | 91.7 | 83.0 | 88.4 | 0.0 | 100.0 | 0.0 | 0.0 |
| Quadratic SVM | 98.0 | 95.8 | 98.3 | 95.8 | 91.7 | 89.3 | 7.6 | 100.0 | 7.6 | 14.2 |
| Cubic SVM | 98.7 | 94.4 | 99.3 | 94.4 | 94.4 | 91.3 | 31.3 | 99.2 | 31.3 | 45.5 |
| Fine Gaussian SVM | 97.9 | 85.4 | 99.5 | 85.4 | 90.4 | 89.7 | 11.8 | 100.0 | 11.8 | 21.1 |
| Medium Gaussian SVM | 95.8 | 90.3 | 96.5 | 90.3 | 83.3 | 89.3 | 7.6 | 100.0 | 7.6 | 14.2 |
| Coarse Gaussian SVM | 89.0 | 11.1 | 99.3 | 11.1 | 19.0 | 88.4 | 0.0 | 100.0 | 0.0 | 0.0 |
| Fine kNN | 91.0 | 28.5 | 99.2 | 28.5 | 42.3 | 91.3 | 29.2 | 99.5 | 29.2 | 43.8 |
| Medium kNN | 96.9 | 91.7 | 97.5 | 91.7 | 87.1 | 98.0 | 93.1 | 98.6 | 93.1 | 91.5 |
| Coarse kNN | 89.7 | 29.2 | 97.6 | 29.2 | 39.6 | 89.7 | 56.9 | 94.0 | 56.9 | 56.2 |
| Cosine kNN | 96.9 | 91.7 | 97.5 | 91.7 | 87.1 | 97.1 | 93.1 | 97.6 | 93.1 | 88.2 |
| Cubic kNN | 96.9 | 91.0 | 97.6 | 91.0 | 87.0 | 97.9 | 93.1 | 98.5 | 93.1 | 91.2 |
| Weighted kNN | 98.0 | 94.4 | 98.4 | 94.4 | 91.6 | 99.0 | 97.2 | 99.3 | 97.2 | 95.9 |
| Ensemble Bagged Trees | 99.1 | 96.5 | 99.5 | 96.5 | 96.2 | 99.0 | 97.2 | 99.3 | 97.2 | 95.9 |
| Ensemble Subspace Discriminant | 92.5 | 61.8 | 96.5 | 61.8 | 65.7 | 88.6 | 2.1 | 100.0 | 2.1 | 4.1 |
| Ensemble Subspace kNN | 91.3 | 27.8 | 99.6 | 27.8 | 42.6 | 90.2 | 28.5 | 98.3 | 28.5 | 40.2 |
| Ensemble RUSBoosted Trees | 98.1 | 97.2 | 98.3 | 97.2 | 92.4 | 98.8 | 97.2 | 99.0 | 97.2 | 94.9 |
| Case II | Case III | |||||||
|---|---|---|---|---|---|---|---|---|
| Method | PCA Not Applied | PCA Applied | PCA Not Applied | PCA Applied | ||||
| weight F1 | Macro F1 | Weight F1 | Macro F1 | Weight F1 | Macro F1 | Weight F1 | Macro F1 | |
| Fine Tree | 95.6 | 86.3 | 93.0 | 73.1 | 70.1 | 70.8 | 63.3 | 60.0 |
| Medium Tree | 95.2 | 85.3 | 92.9 | 73.7 | 68.4 | 67.1 | 63.4 | 53.2 |
| Coarse Tree | 91.5 | 67.9 | 87.3 | 56.4 | 64.3 | 53.6 | 57.3 | 43.0 |
| Linear SVM | 92.8 | 80.6 | 75.7 | 30.3 | 66.3 | 64.5 | 43.0 | 19.4 |
| Quadratic SVM | 95.9 | 87.8 | 77.8 | 38.6 | 67.3 | 65.3 | 43.9 | 34.0 |
| Cubic SVM | 96.1 | 88.6 | 76.2 | 43.8 | 54.5 | 62.9 | 35.9 | 28.9 |
| Fine Gaussian SVM | 93.0 | 75.2 | 83.5 | 49.7 | 62.4 | 56.1 | 56.7 | 42.4 |
| Medium Gaussian SVM | 91.8 | 76.1 | 77.5 | 34.8 | 64.9 | 61.0 | 45.2 | 23.4 |
| Coarse Gaussian SVM | 81.5 | 44.4 | 75.7 | 30.3 | 60.0 | 43.3 | 51.1 | 18.2 |
| Fine kNN | 86.4 | 53.4 | 86.4 | 54.4 | 59.0 | 46.8 | 54.5 | 41.3 |
| Medium kNN | 92.9 | 77.9 | 91.3 | 67.6 | 64.5 | 60.1 | 61.7 | 54.4 |
| Coarse kNN | 80.8 | 43.7 | 82.9 | 48.5 | 54.3 | 36.2 | 53.0 | 34.9 |
| Cosine kNN | 92.2 | 75.7 | 90.9 | 68.3 | 64.3 | 59.1 | 61.4 | 53.4 |
| Cubic kNN | 92.4 | 75.2 | 91.7 | 69.9 | 64.0 | 58.4 | 61.4 | 54.2 |
| Weighted kNN | 94.6 | 82.7 | 92.5 | 73.8 | 67.1 | 65.6 | 62.8 | 58.1 |
| Ensemble Bagged Trees | 96.8 | 89.6 | 93.5 | 75.3 | 72.5 | 73.1 | 63.9 | 60.7 |
| Ensemble Subspace Discriminant | 86.2 | 70.2 | 77.2 | 33.9 | 55.8 | 49.6 | 44.2 | 22.9 |
| Ensemble Subspace kNN | 86.1 | 51.5 | 85.7 | 49.3 | 59.7 | 45.2 | 54.4 | 38.3 |
| Ensemble RUSBoosted Trees | 93.2 | 82.8 | 89.2 | 75.1 | 66.8 | 67.0 | 56.9 | 56.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Górny, K.; Kuwałek, P.; Pietrowski, W. Increasing Electric Vehicles Reliability by Non-Invasive Diagnosis of Motor Winding Faults. Energies 2021, 14, 2510. https://doi.org/10.3390/en14092510
Górny K, Kuwałek P, Pietrowski W. Increasing Electric Vehicles Reliability by Non-Invasive Diagnosis of Motor Winding Faults. Energies. 2021; 14(9):2510. https://doi.org/10.3390/en14092510
Chicago/Turabian StyleGórny, Konrad, Piotr Kuwałek, and Wojciech Pietrowski. 2021. "Increasing Electric Vehicles Reliability by Non-Invasive Diagnosis of Motor Winding Faults" Energies 14, no. 9: 2510. https://doi.org/10.3390/en14092510
APA StyleGórny, K., Kuwałek, P., & Pietrowski, W. (2021). Increasing Electric Vehicles Reliability by Non-Invasive Diagnosis of Motor Winding Faults. Energies, 14(9), 2510. https://doi.org/10.3390/en14092510