
A Two-Level Model Predictive Control-Based Approach for Building Energy Management including Photovoltaics, Energy Storage, Solar Forecasting and Building Loads


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
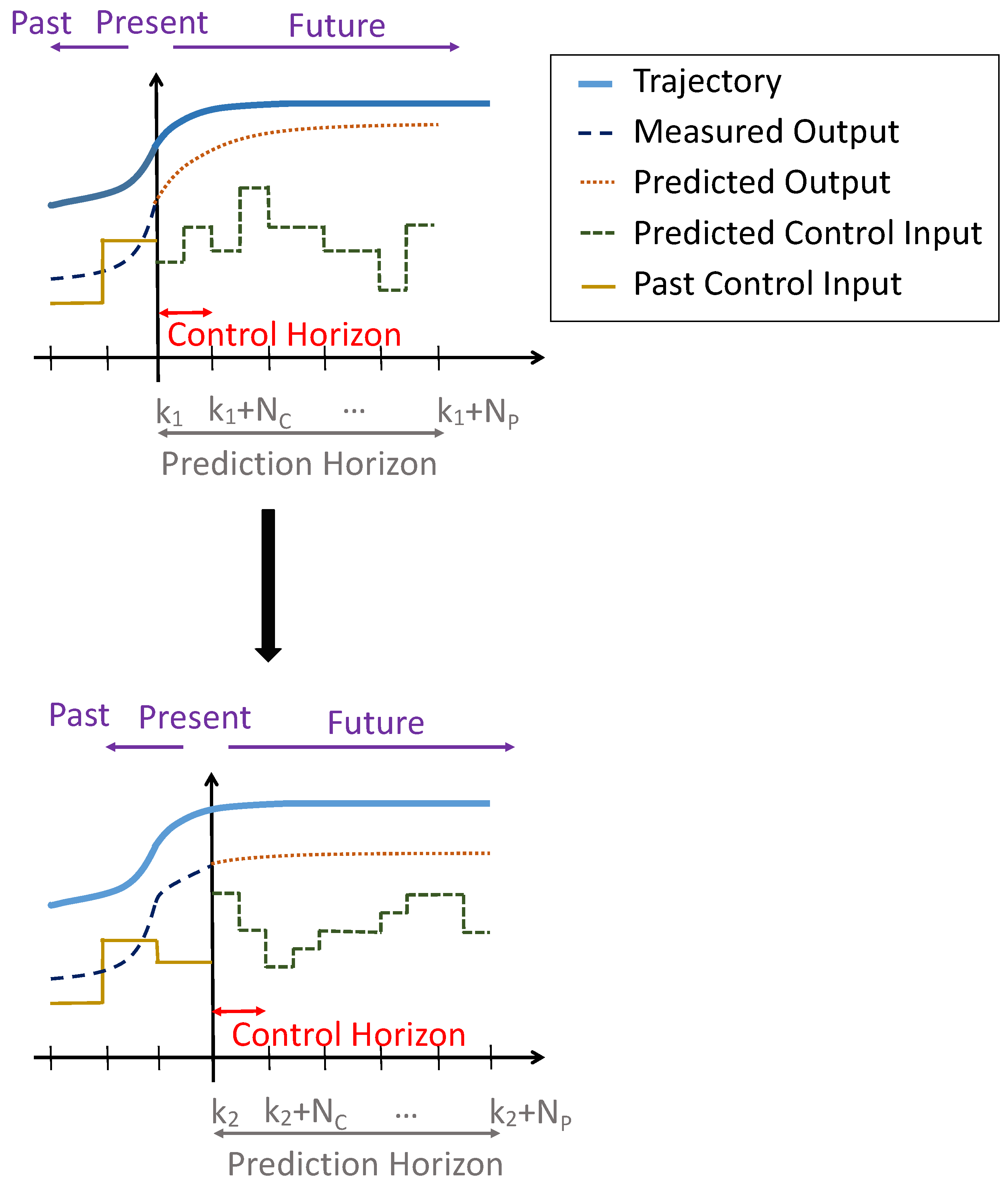
2. Model Predictive Control (MPC)
3. System Design and Modeling
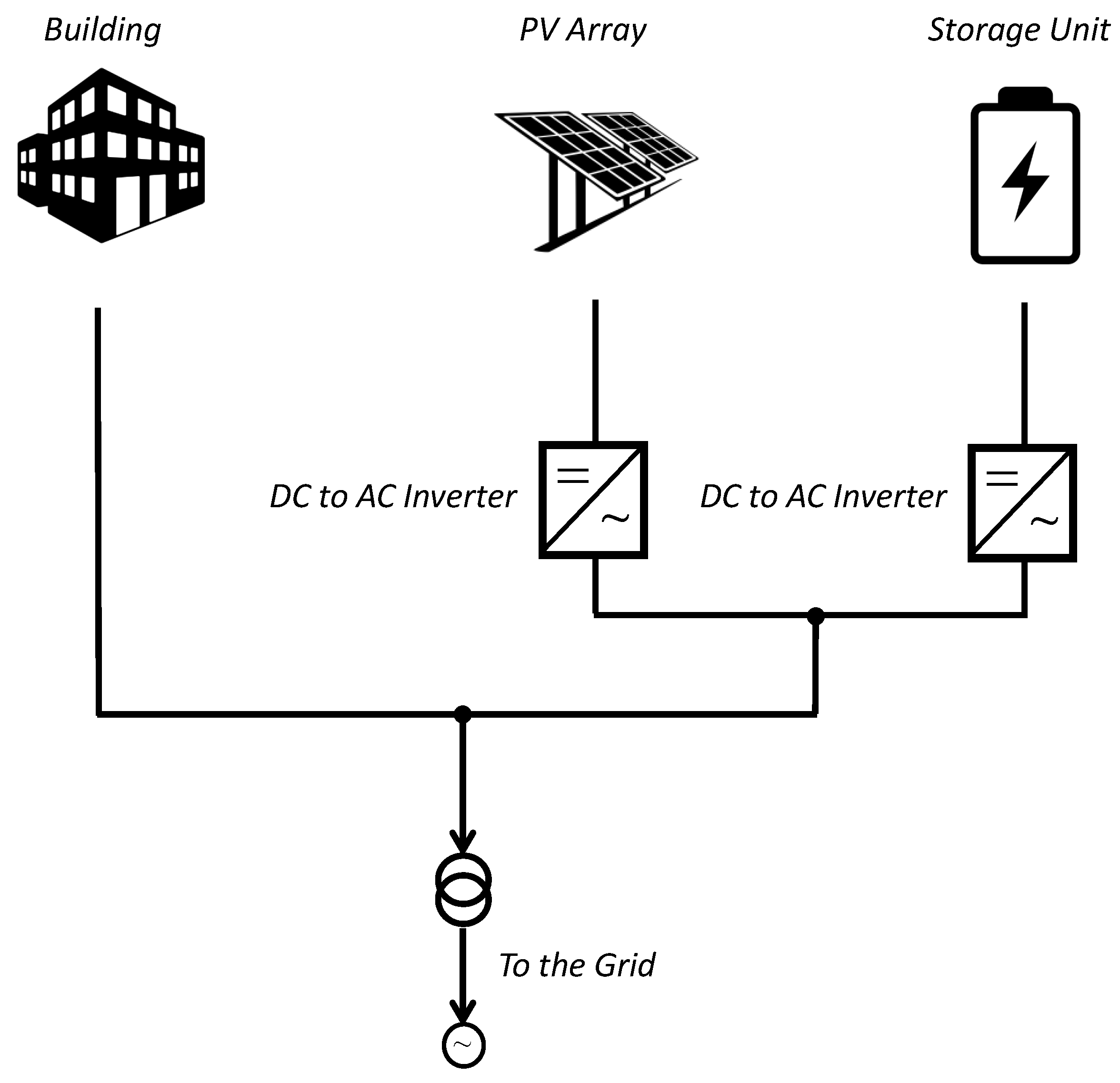
3.1. System Components and Dynamics
- 1.
- Photovoltaic (PV) Array: The power from this unit is always positive and the generated power has fluctuations due to weather conditions and is uncontrollable. The energy storage device is used for smoothing the PV fluctuations by limiting the ramp rate of generated power from the PV and battery to less than per-minute of installed PV capacity, as given by the Equation (1):where at time t, is the energy storage power (kW), is the generated PV power (kW) and is the installed PV capacity (kW).
- 2.
- Energy Storage (ES): This unit can charge and discharge, so the power can be both positive and negative. To maintain high efficiency, the charge/discharge rate and SoC per-minute are limited as follows:where is the energy storage power at time t, and are lower and upper bound power limits, respectively, and are usable bounds for SoC, and is the state of charge at time t minutes, a unitless value between , calculated hourly by (3) with as the maximum capacity of the energy storage unit (kWh).
- 3.
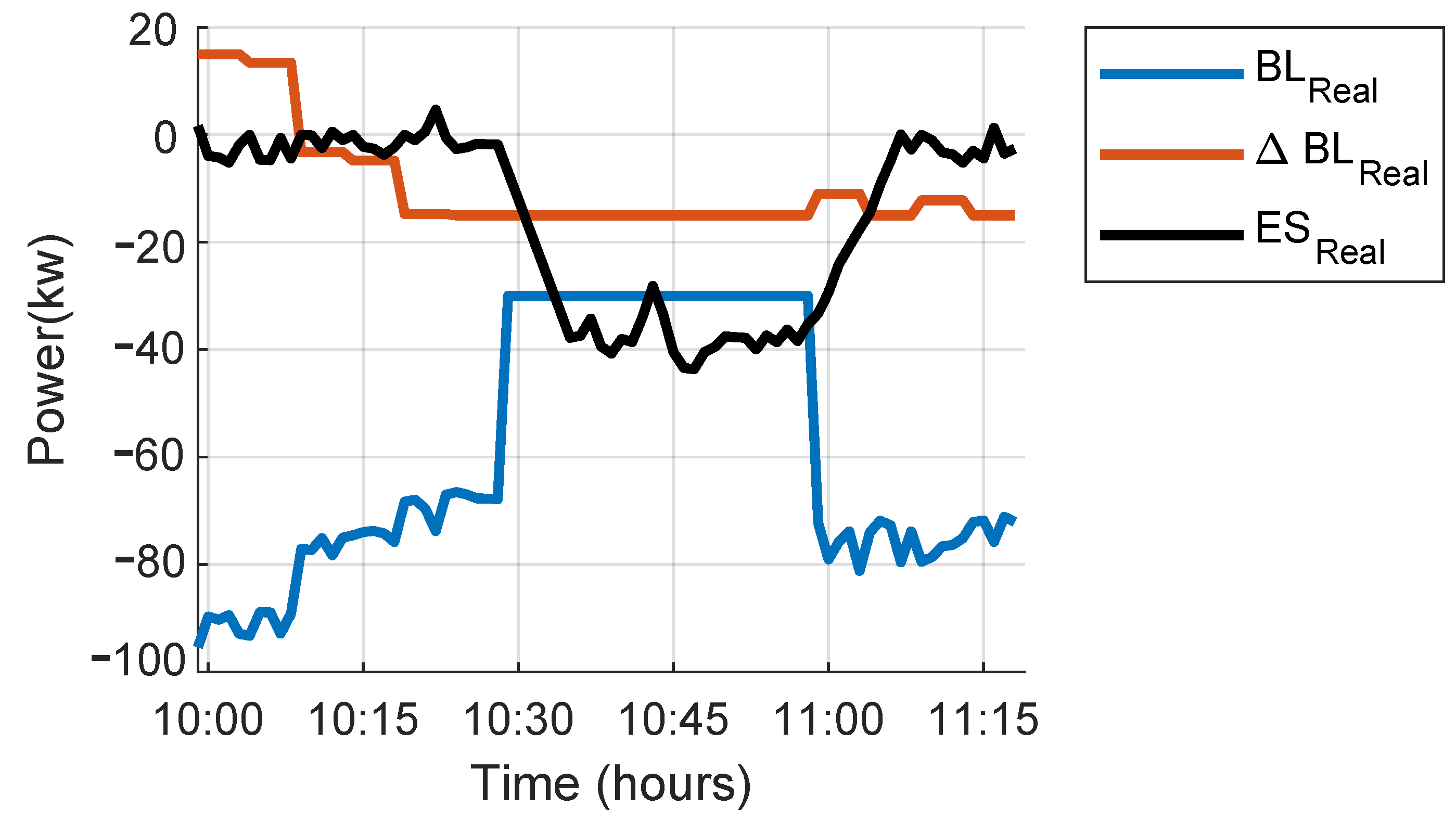
- Building Load (BL): This building only consumes power, so the power is always negative. The total building load can be divided into controllable and uncontrollable loads, where the uncontrollable building loads are measured each minute and the controllable building loads are managed through the building control system using our proposed control method. For the controllable loads, dynamic models that capture the temporal behavior of how the load responds to changes in the set points (e.g., the response of changes in zone temperature set points and static pressure set points on HVAC loads) are included along with operational constraints that determine upper and lower bounds on acceptable changes to these controllable building loads over specified time periods (e.g., these bounds are based on their impact on building operating variables and occupants, such as zone temperatures and building pressure).
3.2. The MPC-Based Control Method
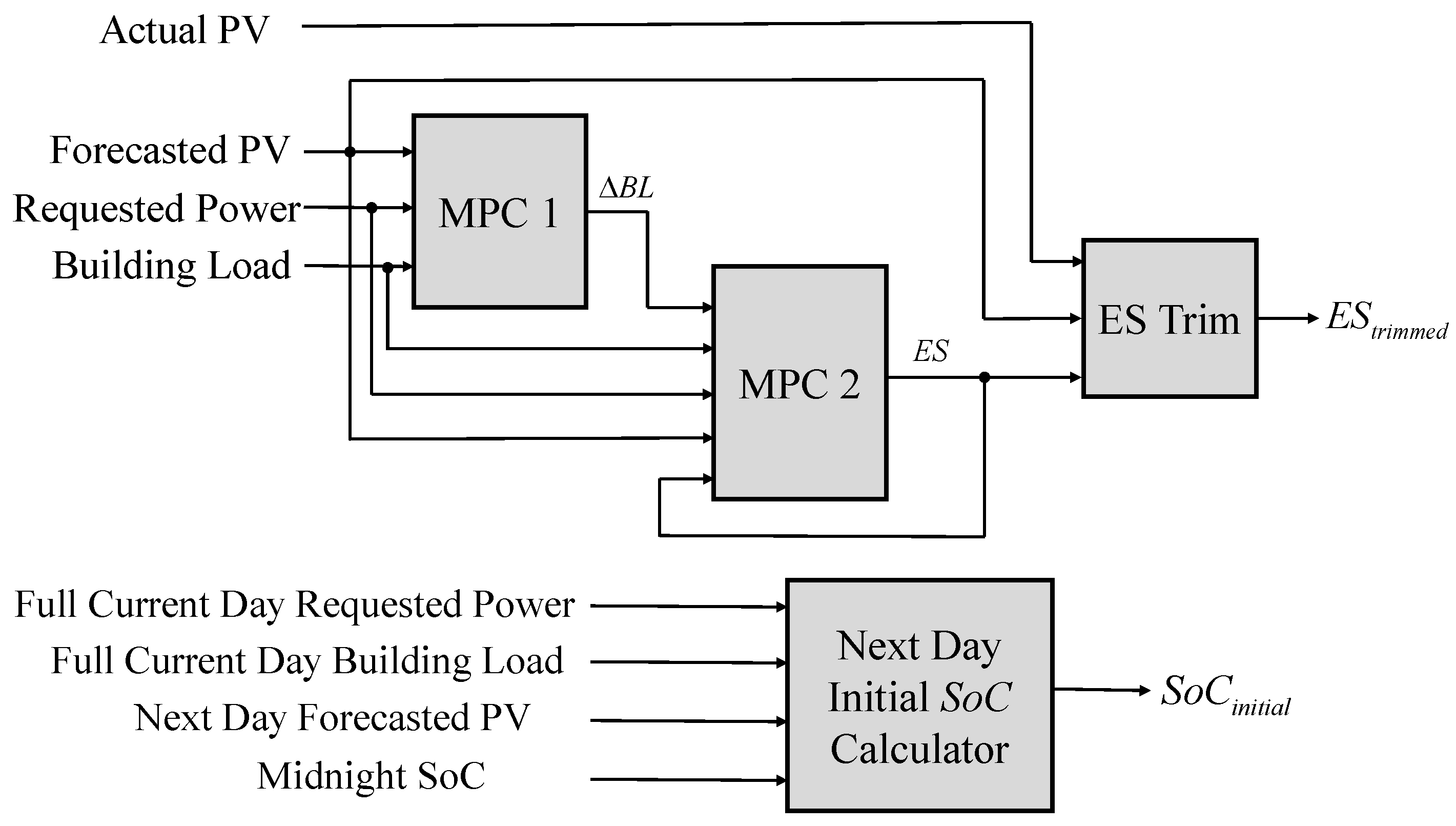
3.3. Local Controller Design
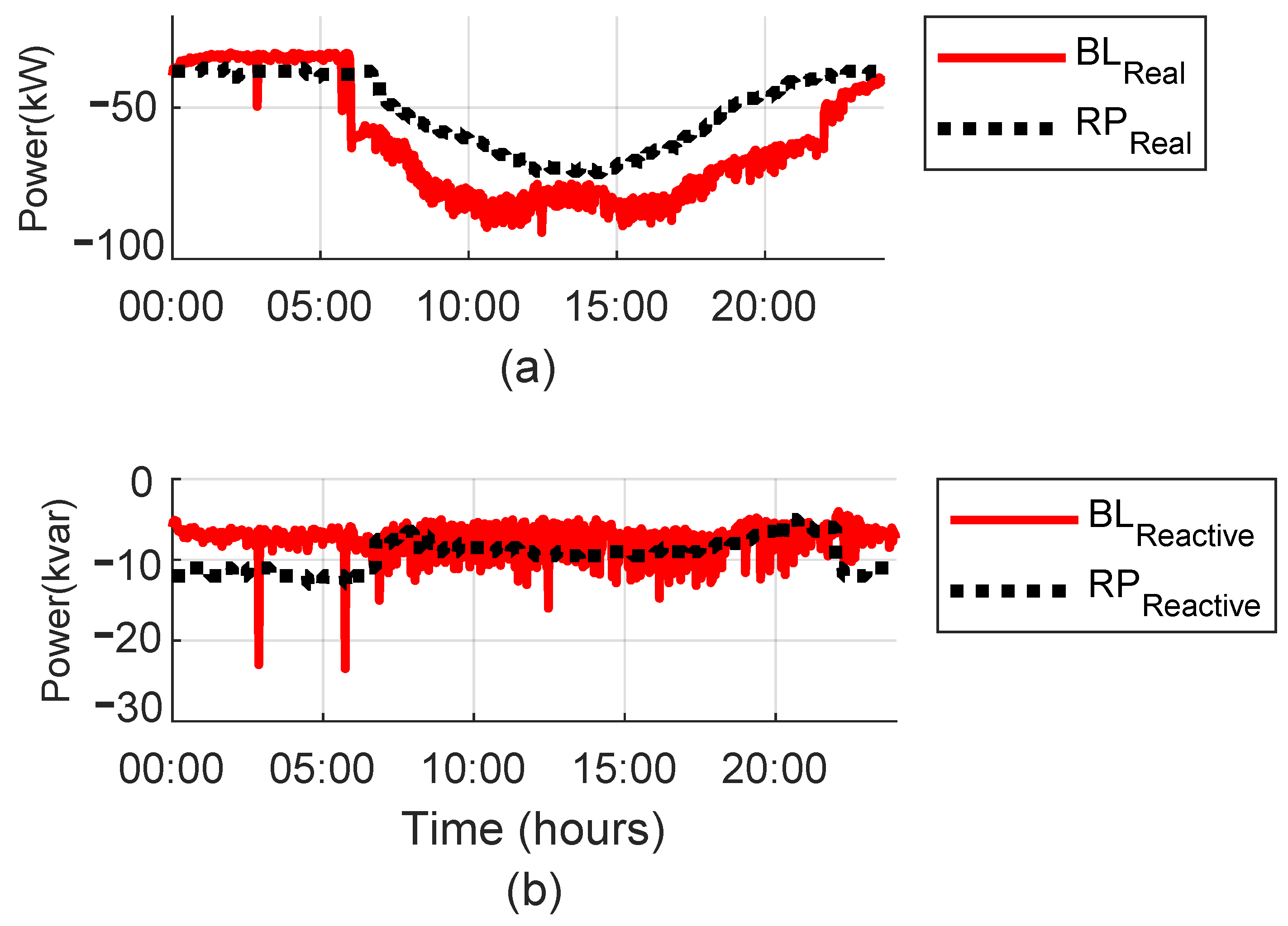
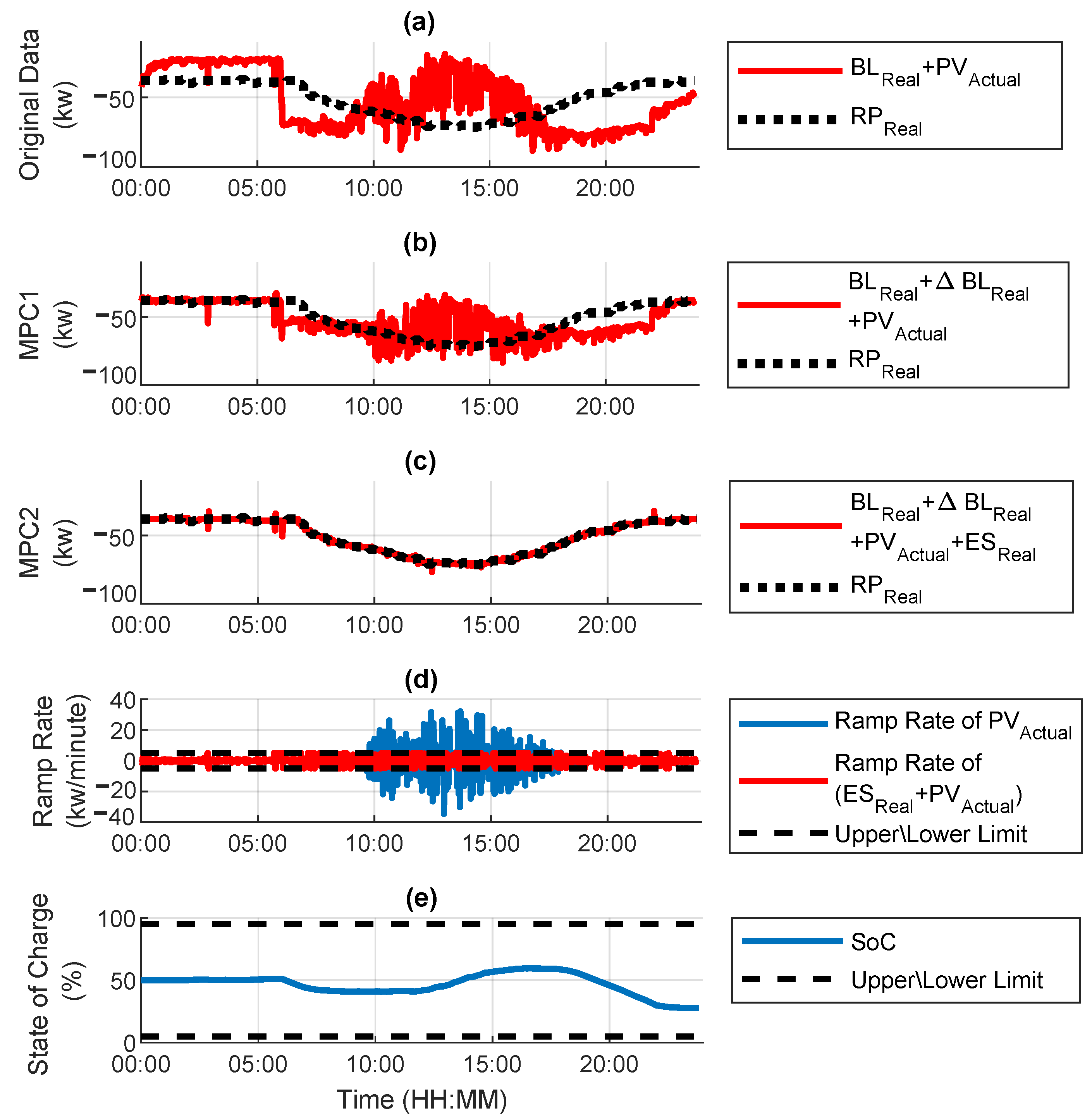
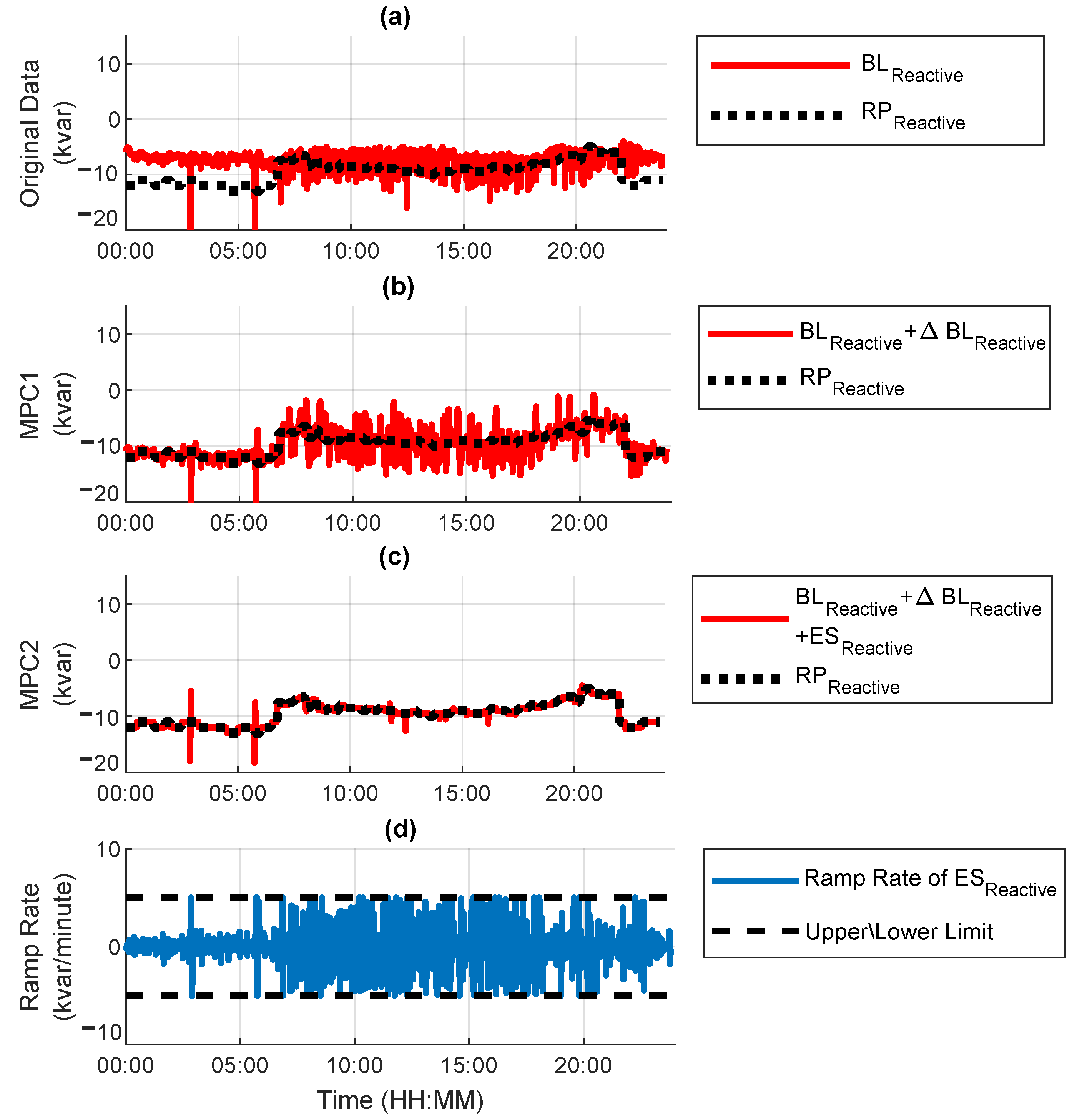
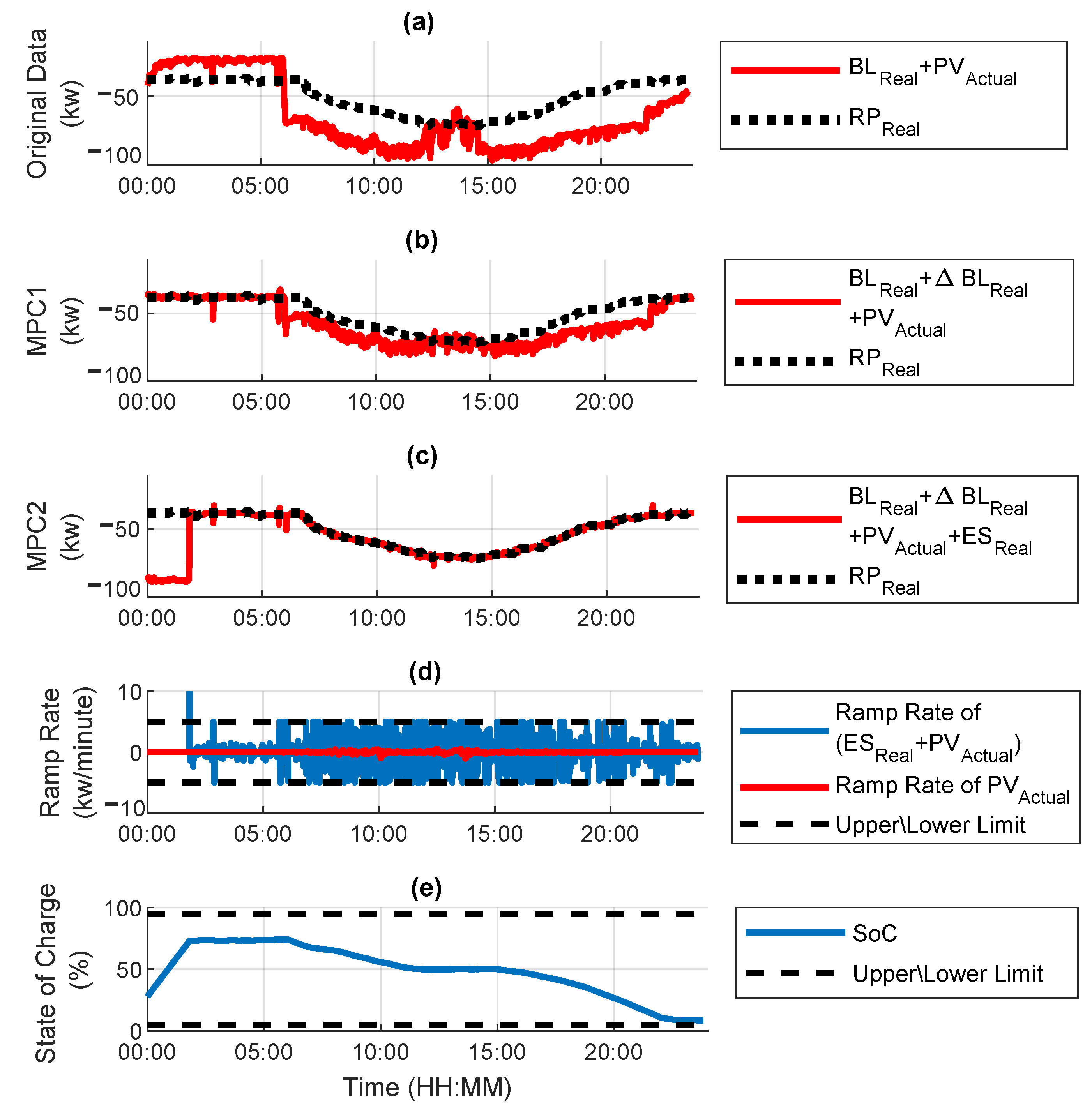
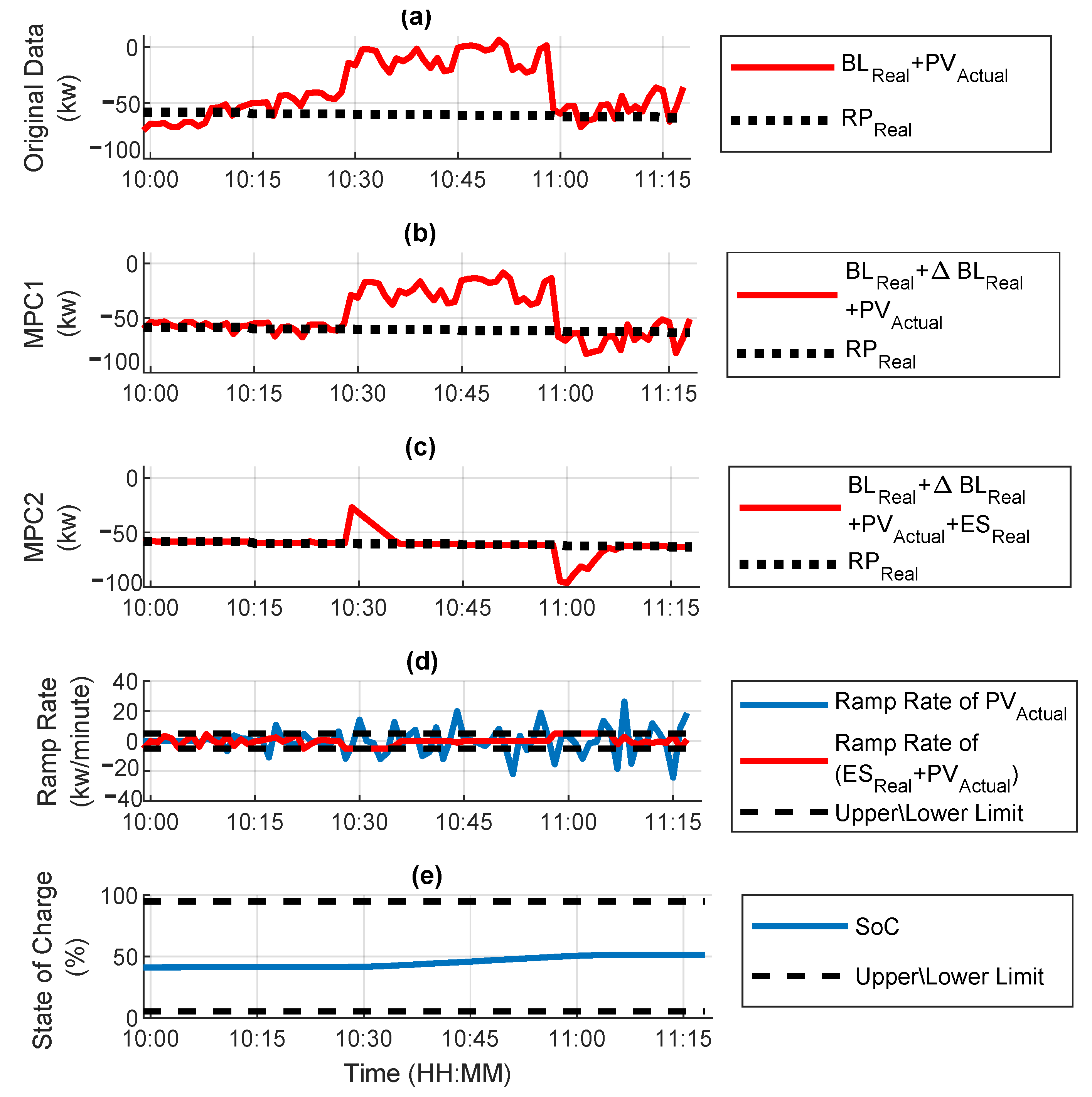
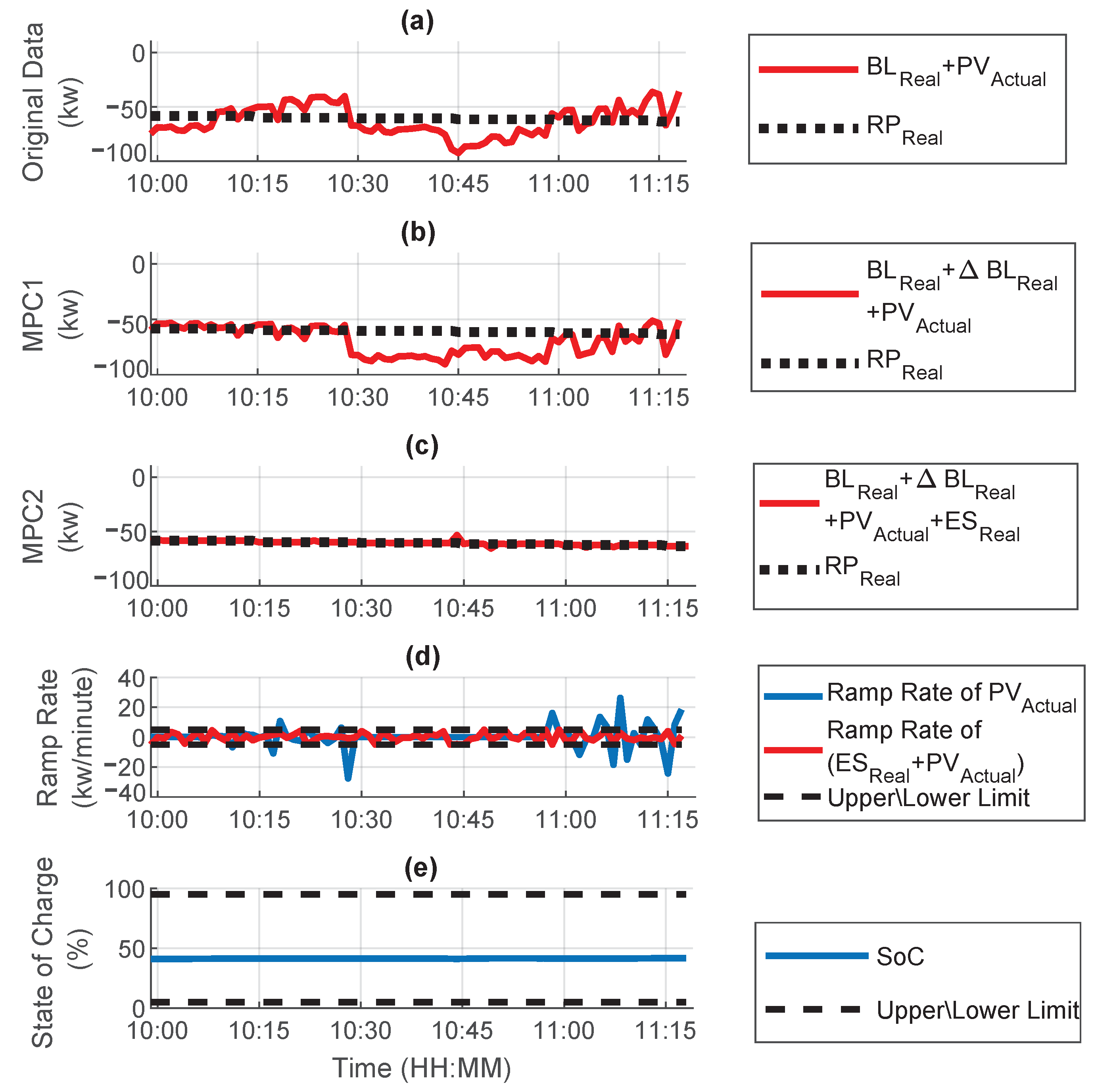
- MPC1: This block calculates the optimized real and reactive building load that minimizes the difference between the requested power and the sum of PV forecast and building load at each time step k within the building operating constraints and a given time horizon.
- MPC2: This block calculates the real and reactive energy storage power that maintains the per minute ramp rate constraint for the combined PV forecast and energy storage power, assists with minimizing the difference between the requested power and the sum of PV forecast and building load at each time step k, while satisfying energy storage system operating constraints and maintaining SoC within its required operating limits.
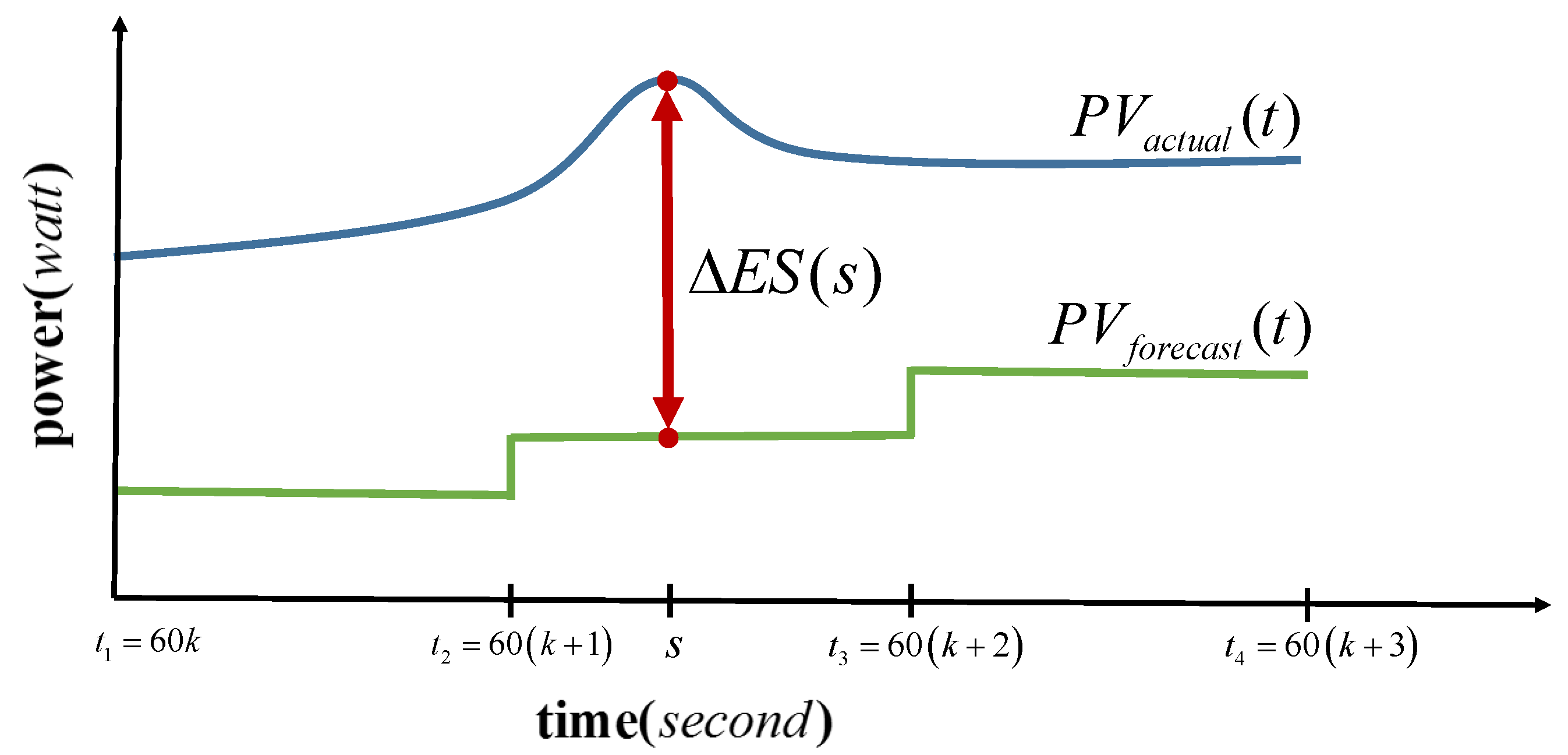
- ES Trim: This block modifies the energy storage power to eliminate the impact of PV forecasting errors on the response of the local (MPC2) controller.
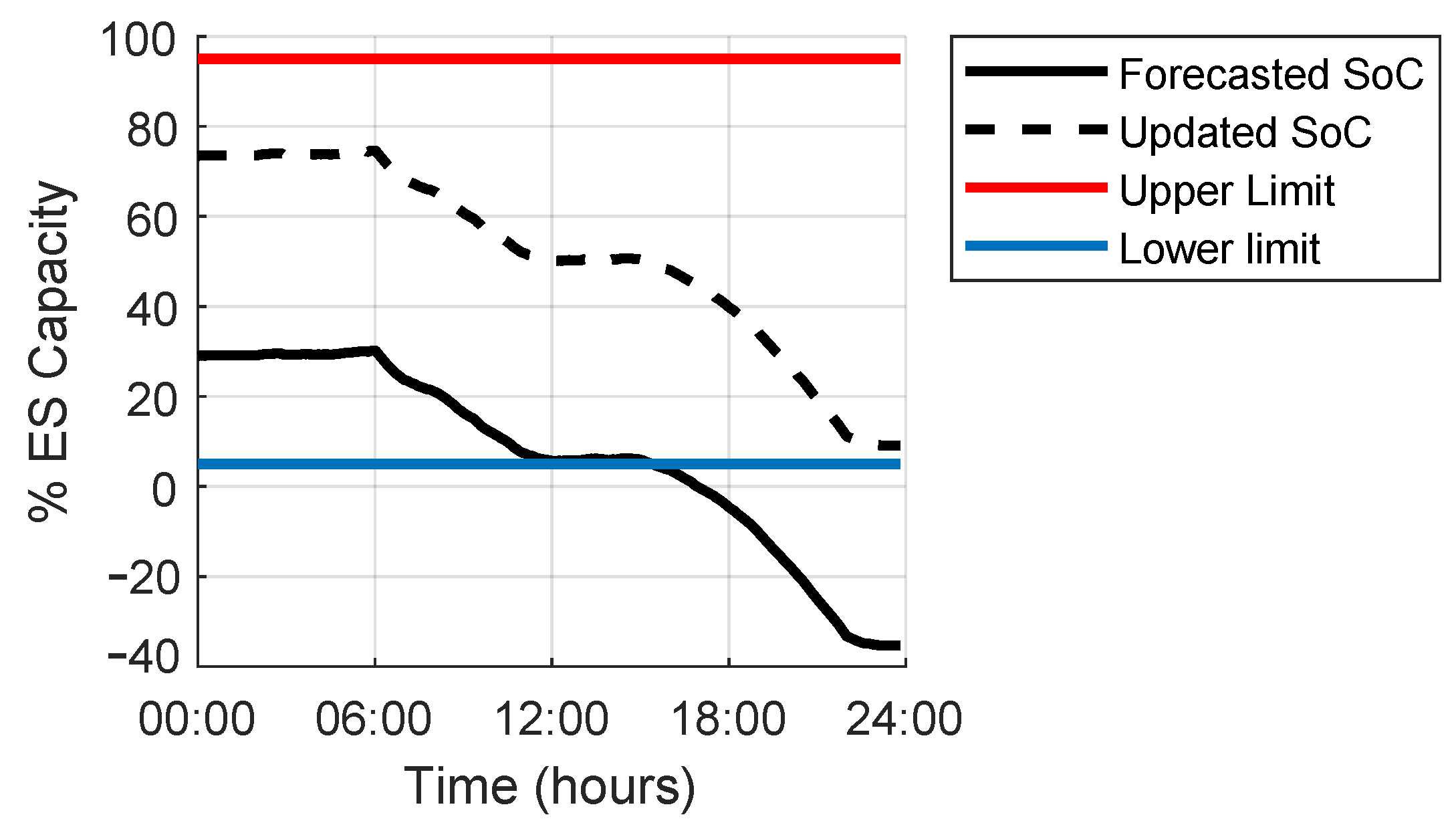
- Next Day Initial SoC Calculator: This block calculates the predicted initial SoC to meet the forecasted energy requirements (requested building load power given predicted building loads and PV forecast) for the next day.
3.3.1. MPC1 (Building Load Calculations)
3.3.2. MPC2 (Energy Storage Calculations)
3.3.3. ES Trim
3.3.4. Next Day Initial SoC Calculator (Overnight Algorithm)
4. Simulation Results
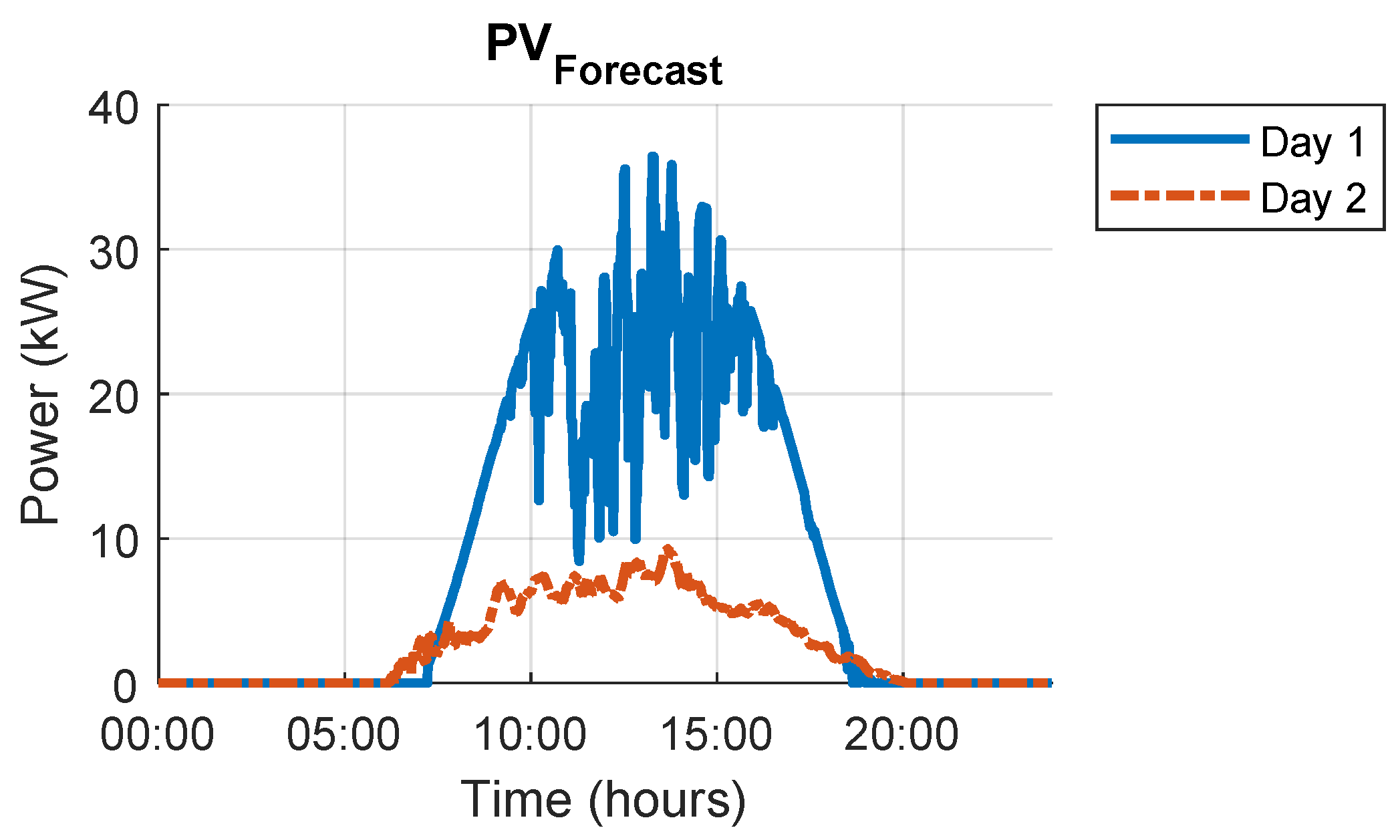
4.1. Two-Day Simulation Results
4.1.1. Day 1 Simulation Results
4.1.2. Day 2 Simulation Results
4.2. System Operational Changes Simulation Results
4.2.1. Scenario 1-Increased Requested Power Consumption
4.2.2. Scenario 2-Decreased Building Load Consumption
4.2.3. Scenario 3-Loss of Generated Power from PV
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MPC | Model Predictive Control |
| SoC | State of Charge |
| ES | Energy Storage |
| BL | Building load |
| PV | Photovoltaic |
| RP | Requested Power |
References
- Jewell, W.; Ramakumar, R. The Effects of Moving Clouds on Electric Utilities with Dispersed Photovoltaic Generation. IEEE Trans. Energy Convers. 1987, EC-2, 570–576. [Google Scholar] [CrossRef]
- Kern, E.C.; Gulachenski, E.M.; Kern, G.A. Cloud effects on distributed photovoltaic generation: Slow transients at the Gardner, Massachusetts photovoltaic experiment. IEEE Trans. Energy Convers. 1989, 4, 184–190. [Google Scholar] [CrossRef]
- Trueblood, C.; Coley, S.; Key, T.; Rogers, L.; Ellis, A.; Hansen, C.; Philpot, E. PV Measures Up for Fleet Duty: Data from a Tennessee Plant Are Used to Illustrate Metrics That Characterize Plant Performance. IEEE Power Energy Mag. 2013, 11, 33–44. [Google Scholar] [CrossRef]
- Kakimoto, N.; Satoh, H.; Takayama, S.; Nakamura, K. Ramp-Rate Control of Photovoltaic Generator With Electric Double-Layer Capacitor. IEEE Trans. Energy Convers. 2009, 24, 456–473. [Google Scholar] [CrossRef]
- Tam, K.S.; Kumar, P.; Foreman, M. Enhancing the utilization of photovoltaic power generation by superconductive magnetic energy storage. IEEE Trans. Energy Convers. 1989, 4, 314–321. [Google Scholar] [CrossRef]
- Hund, T.D.; Gonzalez, S.; Barrett, K. Grid-Tied PV system energy smoothing. In Proceedings of the 35th IEEE Photovoltaic Specialists Conference, Honolulu, HI, USA, 20–25 June 2010. [Google Scholar]
- Li, X.; Hui, D.; Lai, X. Battery Energy Storage Station (BESS)-Based Smoothing Control of Photovoltaic (PV) and Wind Power Generation Fluctuations. IEEE Trans. Sustain. Energy 2013, 4, 464–473. [Google Scholar] [CrossRef]
- Ellis, A.; Schoenwald, D.; Hawkins, J.; Willard, S.; Arellano, B. PV output smoothing with energy storage. In Proceedings of the 38th IEEE Photovoltaic Specialists Conference, Austin, TX, USA, 3–8 June 2012. [Google Scholar]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. A Novel Approach for Ramp-Rate Control of Solar PV Using Energy Storage to Mitigate Output Fluctuations Caused by Cloud Passing. IEEE Trans. Energy Convers. 2014, 29, 507–518. [Google Scholar]
- Salehi, V.; Radibratovic, B. Ramp rate control of photovoltaic power plant output using energy storage devices. In Proceedings of the 2014 IEEE PES General Meeting | Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Pascual, J.; Arcos-Aviles, D.; Ursúa, A.; Sanchis, P.; Marroyo, L. Energy management for an electro-thermal renewable–based residential microgrid with energy balance forecasting and demand side management. Appl. Energy 2021, 295, 117062. [Google Scholar] [CrossRef]
- Godina, R.; Rodrigues, E.M.G.; Shafie-khah, M.; Pouresmaeil, E.; Catalão, J.P.S. Energy optimization strategy with Model Predictive Control and demand response. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–5. [Google Scholar]
- Ospina, J.; Harper, M.; Newaz, A.; Faruque, M.O.; Collins, E.G.; Meeker, R.; Ainsworth, N. Optimal Energy Management of Microgrids using Sampling-Based Model Predictive Control Considering PV Generation Forecast and Real-time Pricing. In Proceedings of the 2019 IEEE Power Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Alarcón, M.A.; Alarcón, R.G.; González, A.H.; Ferramosca, A. Economic model predictive control for energy management in a hybrid storage microgrid. In Proceedings of the 2021 XIX Workshop on Information Processing and Control (RPIC), San Juan, Argentina, 3–5 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Razmara, M.; Bharati, G.R.; Hanover, D.; Shahbakhti, M.; Paudyal, S.; Robinett, R.D. Enabling Demand Response programs via Predictive Control of Building-to-Grid systems integrated with PV Panels and Energy Storage Systems. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 56–61. [Google Scholar] [CrossRef]
- Farrokhifar, M.; Bahmani, H.; Faridpak, B.; Safari, A.; Pozo, D.; Aiello, M. Model predictive control for demand side management in buildings: A survey. Sustain. Cities Soc. 2021, 75, 103381. [Google Scholar] [CrossRef]
- Eseye, A.T.; Knueven, B.; Vaidhynathan, D.; King, J. Scalable Predictive Control and Optimization for Grid Integration of Large-Scale Distributed Energy Resources: Preprint; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2022. [Google Scholar]
- Mahfuz-Ur-Rahman, A.M.; Islam, M.R.; Muttaqi, K.M.; Sutanto, D. An Effective Energy Management With Advanced Converter and Control for a PV-Battery Storage Based Microgrid to Improve Energy Resiliency. IEEE Trans. Ind. Appl. 2021, 57, 6659–6668. [Google Scholar] [CrossRef]
- Joe Qina, S.; Badgwell, T.A. A survey of industrial model predictive control technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Doostmohammadi, F.; Esmaili, A.; Sadeghi, S.H.H.; Nasiri, A.; Talebi, H.A. A model predictive method for efficient power ramp rate control of wind turbines. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- You, S.; Liu, Z.; Zong, Y. Model predictive control for power fluctuation supression in hybrid wind/PV/battery. In Proceedings of the 4th International Conference on Microgeneration and Related Technologies, Tokyo, Japan, 28–30 October 2015. [Google Scholar]
- Wang, T.; Kamath, H.; Willard, S. Control and Optimization of Grid-Tied Photovoltaic Storage Systems Using Model Predictive Control. IEEE Trans. Smart Grid 2014, 5, 1010–1017. [Google Scholar] [CrossRef]
- Raoufat, E.; Asghari, B.; Sharma, R. Model Predictive BESS Control for Demand Charge Management and PV-Utilization Improvement. In Proceedings of the IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 19–22 February 2018. [Google Scholar]
- Parisio, A.; Rikos, E.; Glielmo, L. A Model Predictive Control Approach to Microgrid Operation Optimization. IEEE Trans. Control Syst. Technol. 2014, 22, 1813–1827. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O.M. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Razmara, M.; Bharati, G.R.; Shahbakhti, M.; Paudyal, S.; Robinett, R.D. Bilevel Optimization Framework for Smart Building-to-Grid Systems. IEEE Trans. Smart Grid 2018, 9, 582–593. [Google Scholar] [CrossRef]
- Picasso, B.; Vito, D.; Scattolini, R.; Colaneri, P. An MPC approach to the design of two-layer hierarchical control systems. Automatica 2010, 46, 823–831. [Google Scholar] [CrossRef]
- Kathirgamanathan, A.; De Rosa, M.; Mangina, E.; Finn, D.P. Data-driven predictive control for unlocking building energy flexibility: A review. Renew. Sustain. Energy Rev. 2021, 135, 110120. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agharazi, H.; Prica, M.D.; Loparo, K.A. A Two-Level Model Predictive Control-Based Approach for Building Energy Management including Photovoltaics, Energy Storage, Solar Forecasting and Building Loads. Energies 2022, 15, 3521. https://doi.org/10.3390/en15103521
Agharazi H, Prica MD, Loparo KA. A Two-Level Model Predictive Control-Based Approach for Building Energy Management including Photovoltaics, Energy Storage, Solar Forecasting and Building Loads. Energies. 2022; 15(10):3521. https://doi.org/10.3390/en15103521
Chicago/Turabian StyleAgharazi, Hanieh, Marija D. Prica, and Kenneth A. Loparo. 2022. "A Two-Level Model Predictive Control-Based Approach for Building Energy Management including Photovoltaics, Energy Storage, Solar Forecasting and Building Loads" Energies 15, no. 10: 3521. https://doi.org/10.3390/en15103521
APA StyleAgharazi, H., Prica, M. D., & Loparo, K. A. (2022). A Two-Level Model Predictive Control-Based Approach for Building Energy Management including Photovoltaics, Energy Storage, Solar Forecasting and Building Loads. Energies, 15(10), 3521. https://doi.org/10.3390/en15103521