
Advanced Distributed Cooperative Secondary Control of Islanded DC Microgrids



Abstract
:1. Introduction
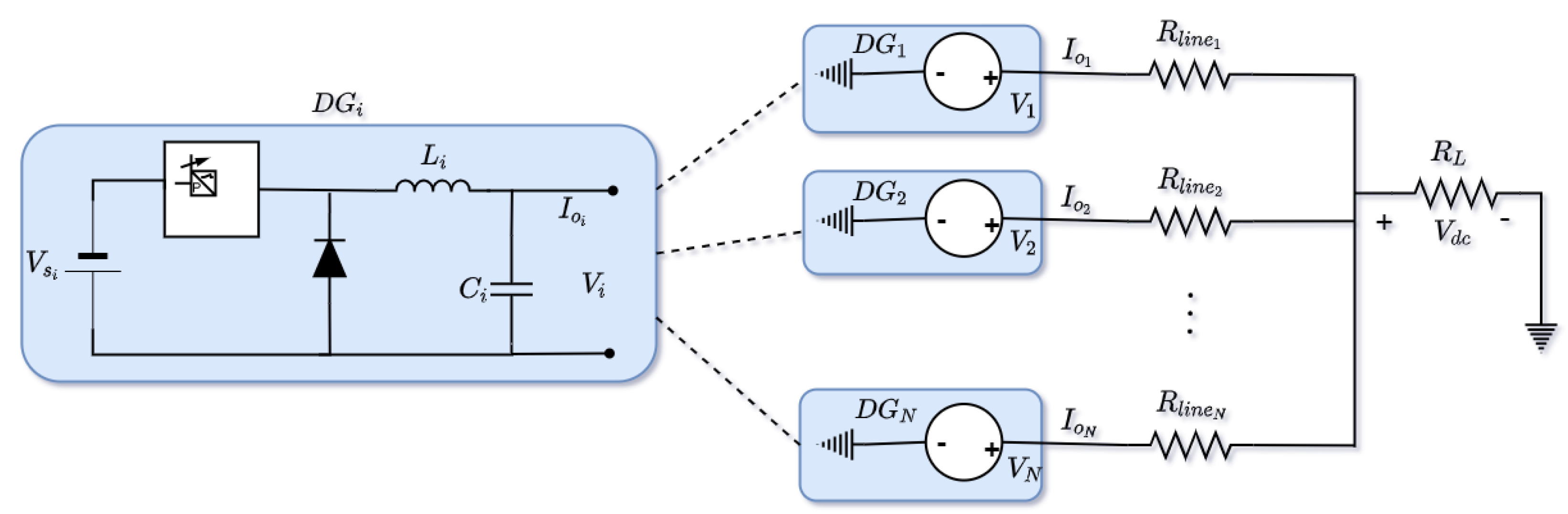
2. Basics of DC Microgrid
2.1. Power Flow
2.2. Information Flow
2.3. Problem Formulation and Control Objectives
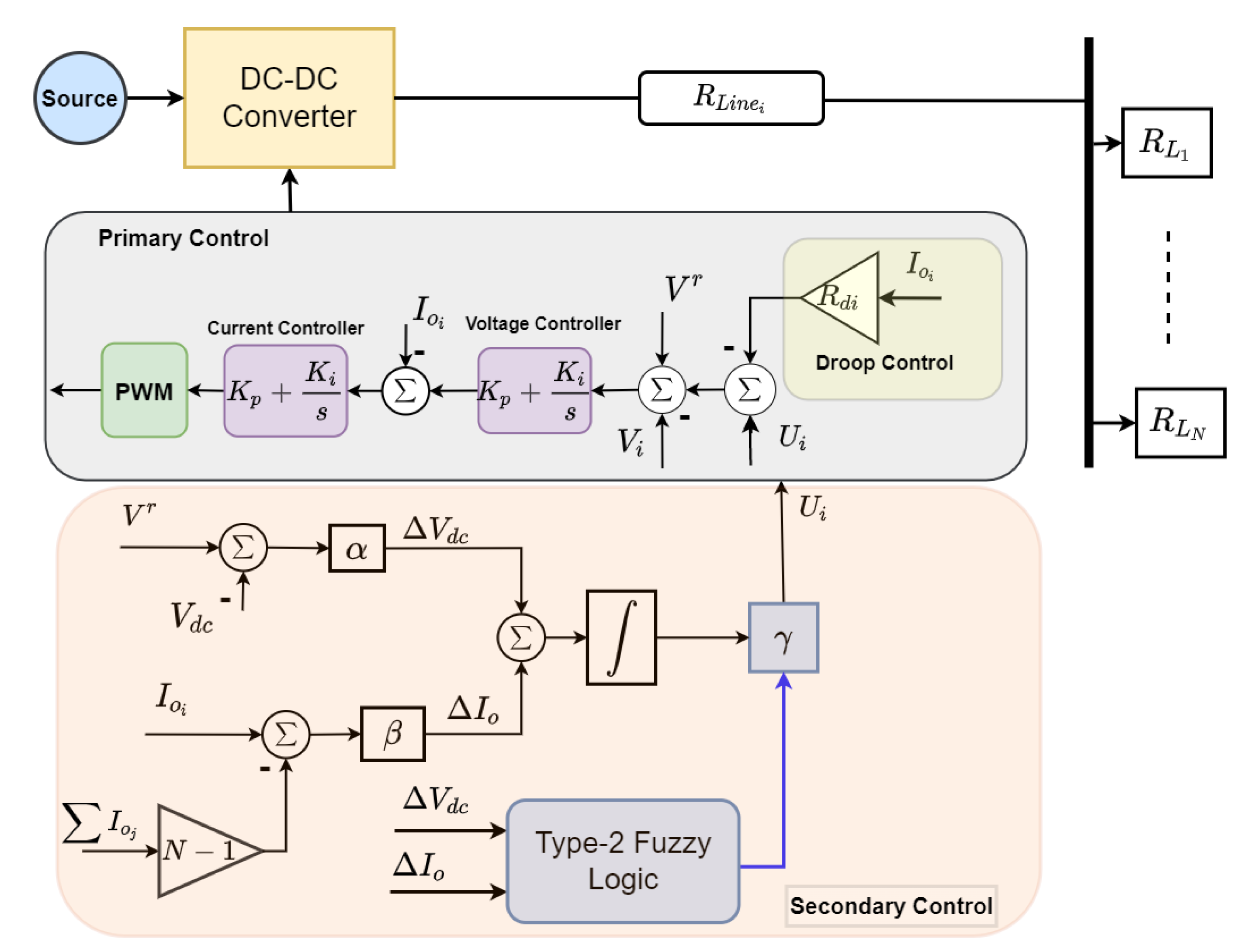
3. Distributed Secondary Control Scheme
3.1. Design of Secondary Controller
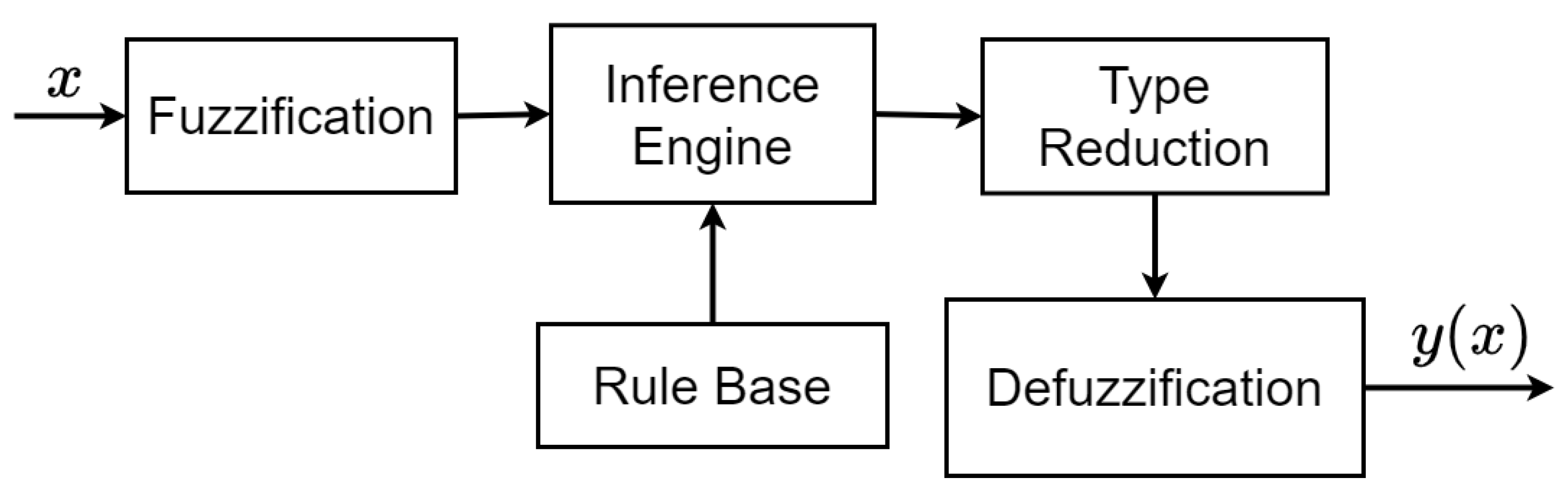
3.2. Basics of Type-II Fuzzy Logic System
4. Proposed Type-II Fuzzy-Based Distributed Secondary Control Scheme
4.1. Proposed Fuzzy-Based Distributed Secondary Controller
4.2. Stability Analysis of Proposed Controller
5. Simulation and Discussion
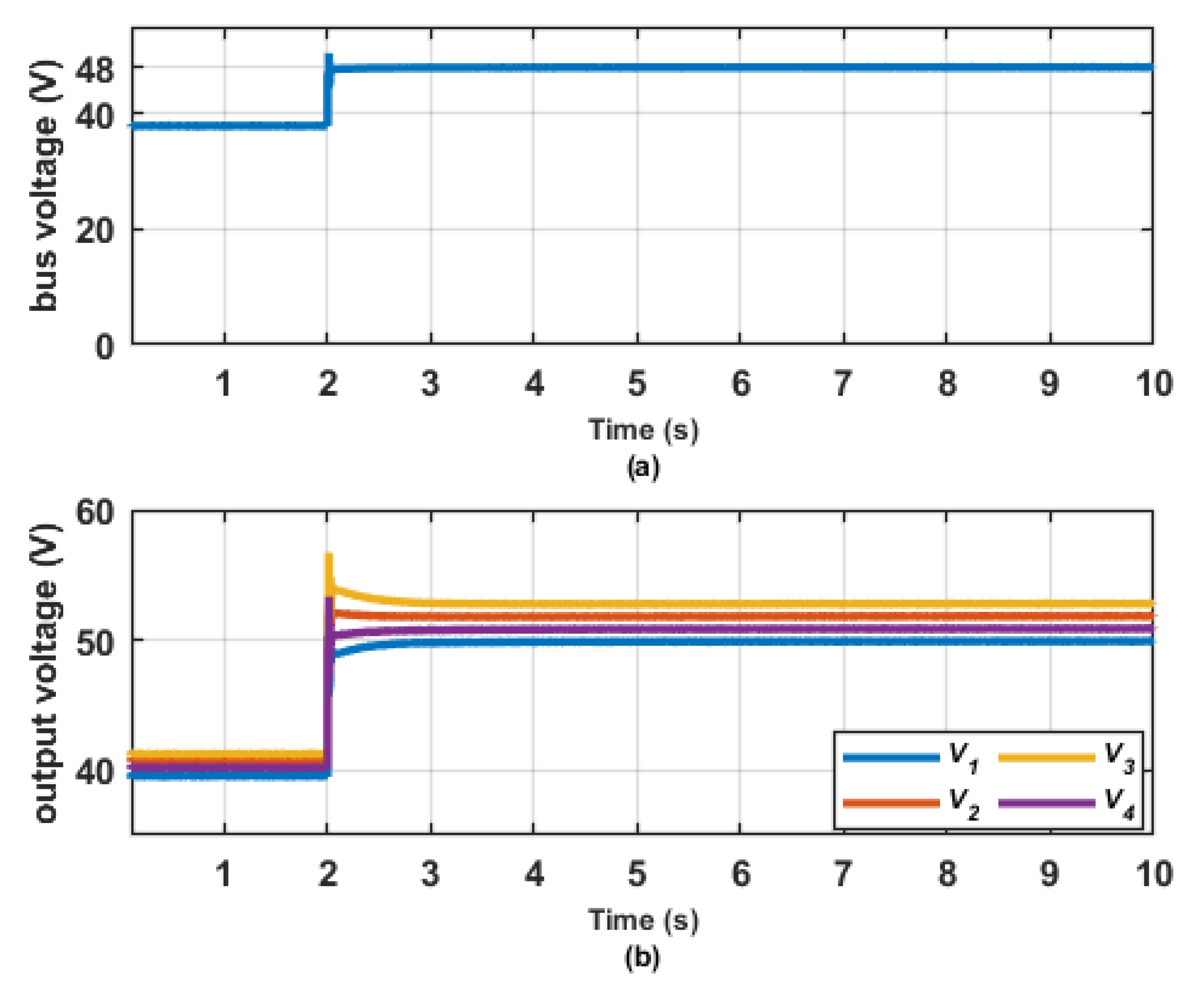
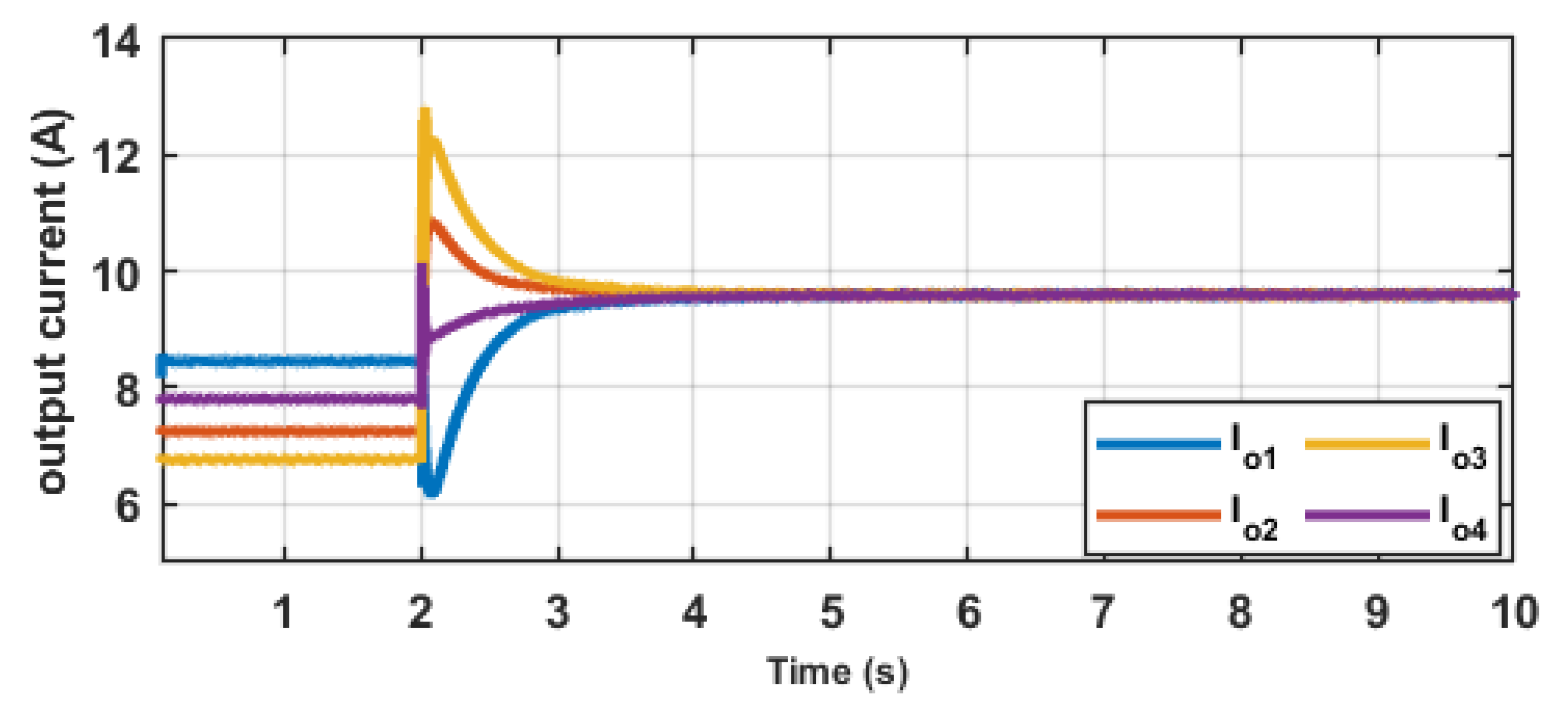
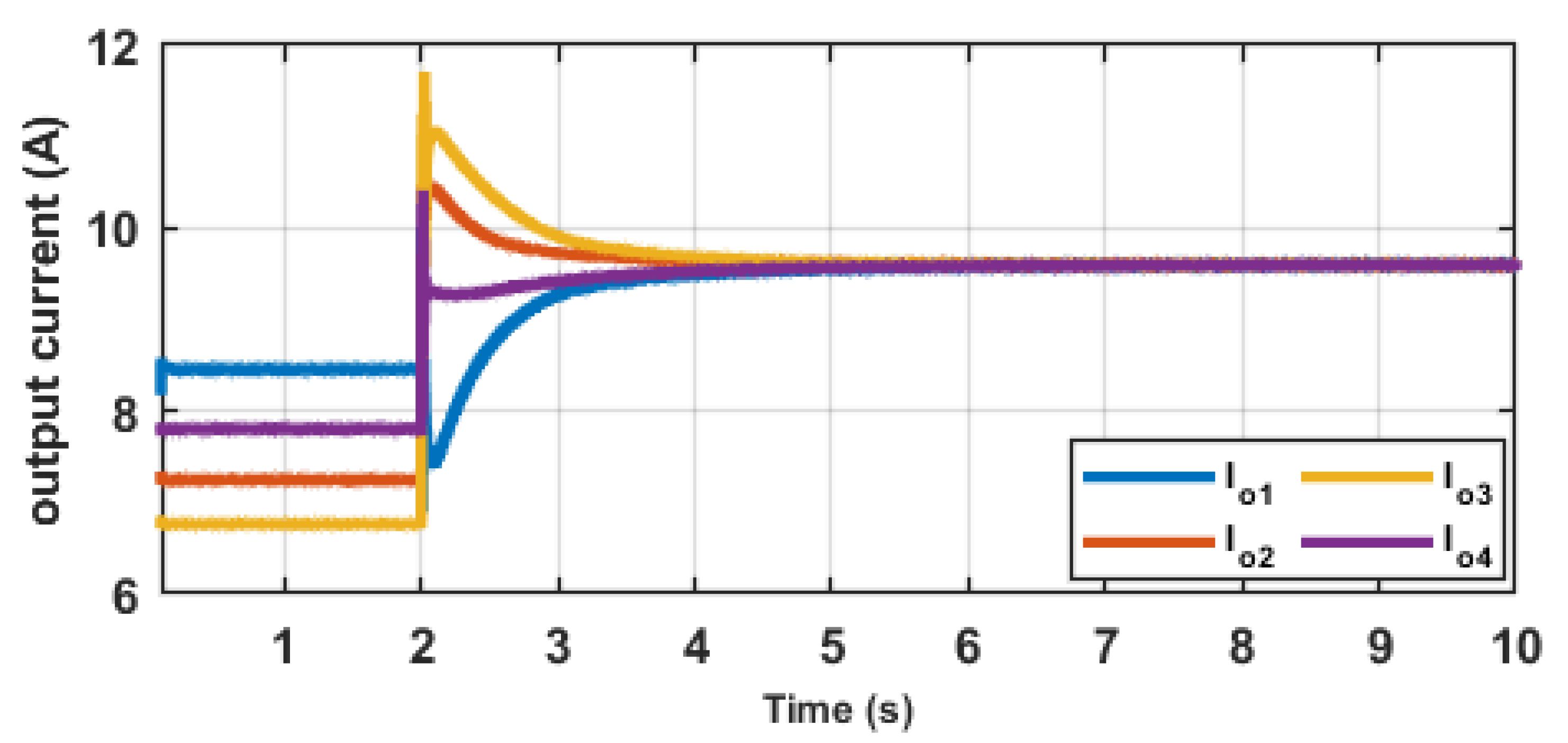
5.1. Test for Distributed Average Current Sharing and Voltage Regulation
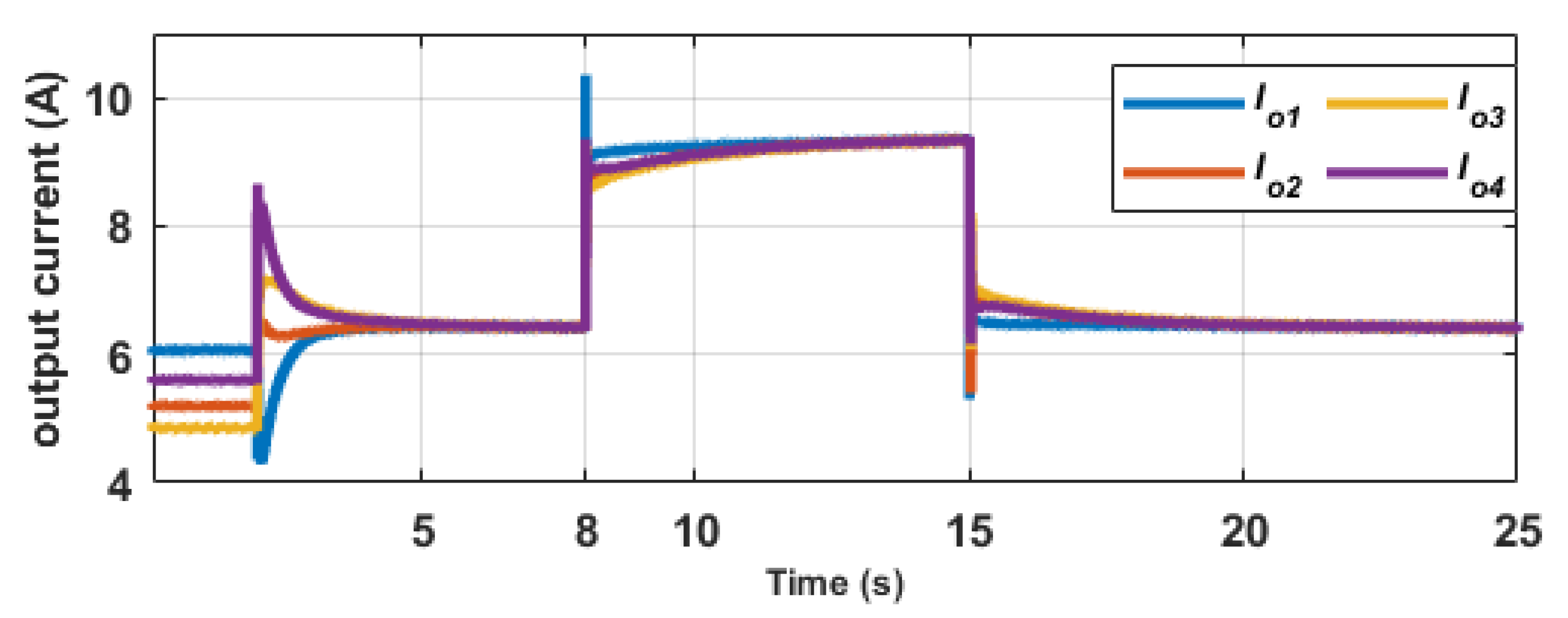
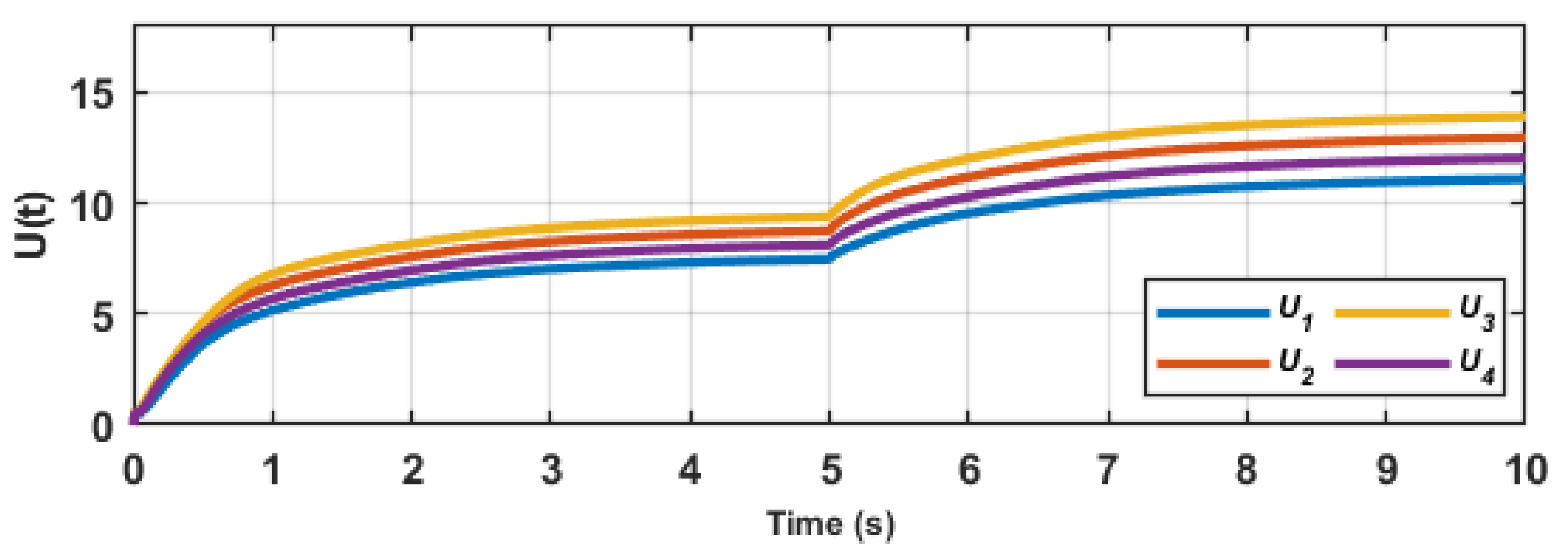
5.2. Performance of Proposed Controller during Load Change
5.3. Performance under Communication Time Delay
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aluko, A.O.; Dorrell, D.G.; Carpanen, R.P.; Ojo, E.E. Heuristic Optimization of Virtual Inertia Control in Grid-Connected Wind Energy Conversion Systems for Frequency Support in a Restructured Environment. Energies 2020, 13, 564. [Google Scholar] [CrossRef] [Green Version]
- Aluko, A.; Musumpuka, R.; Dorrell, D. Cyberattack-Resilient Secondary Frequency Control Scheme for Stand-Alone Microgrids. IEEE Trans. Ind. Electron. 2022. [Google Scholar] [CrossRef]
- Kumar, J.; Agarwal, A.; Singh, N. Design, operation and control of a vast DC microgrid for integration of renewable energy sources. Renewable Energy Focus 2020, 34, 17–36. [Google Scholar] [CrossRef]
- Al-Ismail, F.S. DC microgrid planning, operation, and control: A comprehensive review. IEEE Access 2021, 9, 36154–36172. [Google Scholar] [CrossRef]
- Aluko, A.O.; Dorrell, D.G.; Ojo, E.E. Inertia Emulation in Low Inertia Power Systems Considering Frequency Measurement Effects. In Proceedings of the 2021 International Conference on Electrical, Computer and Energy Technologies (ICECET), Cape Town, South Africa, 9–10 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Abhishek, A.; Ranjan, A.; Devassy, S.; Verma, B.K.; Ram, S.K.; Dhakar, A.K. Review of hierarchical control strategies for DC microgrid. IET Renew. Power Gener. 2020, 14, 1631–1640. [Google Scholar] [CrossRef]
- Fang, J.; Shuai, Z.; Zhang, X.; Shen, X.; Shen, Z.J. Secondary power sharing regulation strategy for a dc microgrid via maximum loading factor. IEEE Trans. Power Electron. 2019, 34, 11856–11867. [Google Scholar] [CrossRef]
- Nahata, P.; La Bella, A.; Scattolini, R.; Ferrari-Trecate, G. Hierarchical control in islanded DC microgrids with flexible structures. IEEE Trans. Control. Syst. Technol. 2020, 29, 2379–2392. [Google Scholar] [CrossRef]
- Peyghami, S.; Mokhtari, H.; Loh, P.C.; Davari, P.; Blaabjerg, F. Distributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC characteristics. IEEE Trans. Smart Grid 2017, 9, 2284–2294. [Google Scholar] [CrossRef] [Green Version]
- Federico, I.; Jose, E.; Luis, F. Master–slave DC droop control for paralleling auxiliary DC/DC converters in electric bus applications. IET Power Electron. 2017, 10, 1156–1164. [Google Scholar] [CrossRef]
- Wu, D.; Tang, F.; Dragicevic, T.; Guerrero, J.M.; Vasquez, J.C. Coordinated control based on bus-signaling and virtual inertia for islanded DC microgrids. IEEE Trans. Smart Grid 2015, 6, 2627–2638. [Google Scholar] [CrossRef] [Green Version]
- Cupelli, M.; Monti, A.; De Din, E.; Sulligoi, G. Case study of voltage control for MVDC microgrids with constant power loads-Comparison between centralized and decentralized control strategies. In Proceedings of the 2016 18th Mediterranean Electrotechnical Conference (MELECON), Lemesos, Cyprus, 18–20 April 2016; pp. 1–6. [Google Scholar]
- Xu, Q.; Xiao, J.; Hu, X.; Wang, P.; Lee, M.Y. A decentralized power management strategy for hybrid energy storage system with autonomous bus voltage restoration and state-of-charge recovery. IEEE Trans. Ind. Electron. 2017, 64, 7098–7108. [Google Scholar] [CrossRef]
- Amiri, H.; Markadeh, G.A.; Dehkordi, N.M.; Blaabjerg, F. Fully decentralized robust backstepping voltage control of photovoltaic systems for DC islanded microgrids based on disturbance observer method. ISA Trans. 2020, 101, 471–481. [Google Scholar] [CrossRef] [PubMed]
- Ge, X.; Han, H.; Xiong, W.; Su, M.; Liu, Z.; Sun, Y. Locally-distributed and globally-decentralized control for hybrid series-parallel microgrids. Int. J. Electr. Power Energy Syst. 2020, 116, 105537. [Google Scholar] [CrossRef]
- Peng, J.; Fan, B.; Duan, J.; Yang, Q.; Liu, W. Adaptive decentralized output-constrained control of single-bus DC microgrids. IEEE/CAA J. Autom. Sin. 2019, 6, 424–432. [Google Scholar] [CrossRef]
- Gao, F.; Kang, R.; Cao, J.; Yang, T. Primary and secondary control in DC microgrids: A review. J. Mod. Power Syst. Clean Energy 2019, 7, 227–242. [Google Scholar] [CrossRef] [Green Version]
- Armghan, H.; Yang, M.; Wang, M.; Ali, N.; Armghan, A. Nonlinear integral backstepping based control of a DC microgrid with renewable generation and energy storage systems. Int. J. Electr. Power Energy Syst. 2020, 117, 105613. [Google Scholar] [CrossRef]
- Chen, X.; Shi, M.; Zhou, J.; Chen, Y.; Zuo, W.; Wen, J.; He, H. Distributed cooperative control of multiple hybrid energy storage systems in a DC microgrid using consensus protocol. IEEE Trans. Ind. Electron. 2020, 67, 1968–1979. [Google Scholar] [CrossRef]
- Guo, F.; Xu, Q.; Wen, C.; Wang, L.; Wang, P. Distributed secondary control for power allocation and voltage restoration in islanded DC microgrids. IEEE Trans. Sustain. Energy 2018, 9, 1857–1869. [Google Scholar] [CrossRef]
- Dong, M.; Li, L.; Nie, Y.; Song, D.; Yang, J. Stability analysis of a novel distributed secondary control considering communication delay in DC microgrids. IEEE Trans. Smart Grid 2019, 10, 6690–6700. [Google Scholar] [CrossRef]
- Guo, F.; Wang, L.; Wen, C.; Zhang, D.; Xu, Q. Distributed voltage restoration and current-sharing control in islanded DC microgrid systems without continuous communication. IEEE Trans. Ind. Electron. 2020, 67, 3043–3053. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H.; Dragičevié, T. The future 5G network-based secondary load frequency control in shipboard microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 836–844. [Google Scholar] [CrossRef]
- Shan, Y.; Hu, J.; Chan, K.W.; Islam, S. A unified model predictive voltage and current control for microgrids with distributed fuzzy cooperative secondary control. IEEE Trans. Ind. Inform. 2021, 17, 8024–8034. [Google Scholar] [CrossRef]
- Deshmukh, R.R.; Ballal, M.S.; Suryawanshi, H.M. A fuzzy logic based supervisory control for power management in multibus DC microgrid. IEEE Trans. Ind. Appl. 2020, 56, 6174–6185. [Google Scholar] [CrossRef]
- Farsizadeh, H.; Gheisarnejad, M.; Mosayebi, M.; Rafiei, M.; Khooban, M.H. An intelligent and fast controller for DC/DC converter feeding CPL in a DC microgrid. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1104–1108. [Google Scholar] [CrossRef]
- Khooban, M.H.; Gheisarnejad, M.; Vafamand, N.; Boudjadar, J. Electric vehicle power propulsion system control based on time-varying fractional calculus: Implementation and experimental results. IEEE Trans. Intell. Veh. 2019, 4, 255–264. [Google Scholar] [CrossRef]
- Aluko, A.O.; Carpanen, R.P.; Dorrell, D.G.; Ojo, E.E. Robust State Estimation Method for Adaptive Load Frequency Control of Interconnected Power System in a Restructured Environment. IEEE Syst. J. 2021, 15, 5046–5056. [Google Scholar] [CrossRef]
- Liang, Q.; Mendel, J.M. Interval type-2 fuzzy logic systems: Theory and design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef] [Green Version]
- Zammit, D.; Staines, C.S.; Apap, M.; Micallef, A. Overview of Buck and Boost converters modelling and control for stand-alone DC microgrid operation. In Proceedings of the Offshore Energy &Storage Symposium (OSES 2016), Valletta, Malta, 13–15 July 2016; Volume 2294, pp. 2284–2294. [Google Scholar]
- Liu, X.K.; Wang, Y.W.; Lin, P.; Wang, P. Distributed supervisory secondary control for a DC microgrid. IEEE Trans. Energy Convers. 2020, 35, 1736–1746. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PL | PS | Z | NS | NL | ||
| PL | L | L | M | M | M | |
| PS | L | L | S | M | M | |
| Z | L | S | S | S | L | |
| NS | M | M | S | L | L | |
| NL | M | M | M | L | L | |
| Parameter | Symbol | Value |
|---|---|---|
| Rated Bus Voltage | 48 V | |
| Source Voltage | 100 V | |
| Sampling Frequency | 10 kHz | |
| Filter Inductance and Capacitance | 1 mH, | |
| Line Resistance | ||
| Total Load | ||
| Primary and Secondary Controls | ||
| Inner Current Controller | 0.05, 148 | |
| Inner Voltage Control | 0.248, 36 | |
| Droop resistance | ||
| Voltage Deviation weights | 1.25 | |
| Current Deviation weights | 7.5 | |
| Control Objective | Traditional Secondary Control | Proposed Type-II Fuzzy Logic Control |
|---|---|---|
| Objective 1 | 2 s | 0.1 s |
| Objective 2 | 2.8 s | 2 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aluko, A.; Buraimoh, E.; Oni, O.E.; Davidson, I.E. Advanced Distributed Cooperative Secondary Control of Islanded DC Microgrids. Energies 2022, 15, 3988. https://doi.org/10.3390/en15113988
Aluko A, Buraimoh E, Oni OE, Davidson IE. Advanced Distributed Cooperative Secondary Control of Islanded DC Microgrids. Energies. 2022; 15(11):3988. https://doi.org/10.3390/en15113988
Chicago/Turabian StyleAluko, Anuoluwapo, Elutunji Buraimoh, Oluwafemi Emmanuel Oni, and Innocent Ewean Davidson. 2022. "Advanced Distributed Cooperative Secondary Control of Islanded DC Microgrids" Energies 15, no. 11: 3988. https://doi.org/10.3390/en15113988
APA StyleAluko, A., Buraimoh, E., Oni, O. E., & Davidson, I. E. (2022). Advanced Distributed Cooperative Secondary Control of Islanded DC Microgrids. Energies, 15(11), 3988. https://doi.org/10.3390/en15113988