
Parametric Transient Stability Constrained Optimal Power Flow Solved by Polynomial Approximation Based on the Stochastic Collocation Method


Abstract
:1. Introduction
2. Formulation of Parametric Transient Stability Constrained Optimal Power Flow
3. Reformulation of Transient Stability Constraints Based on the Stochastic Collocation Method
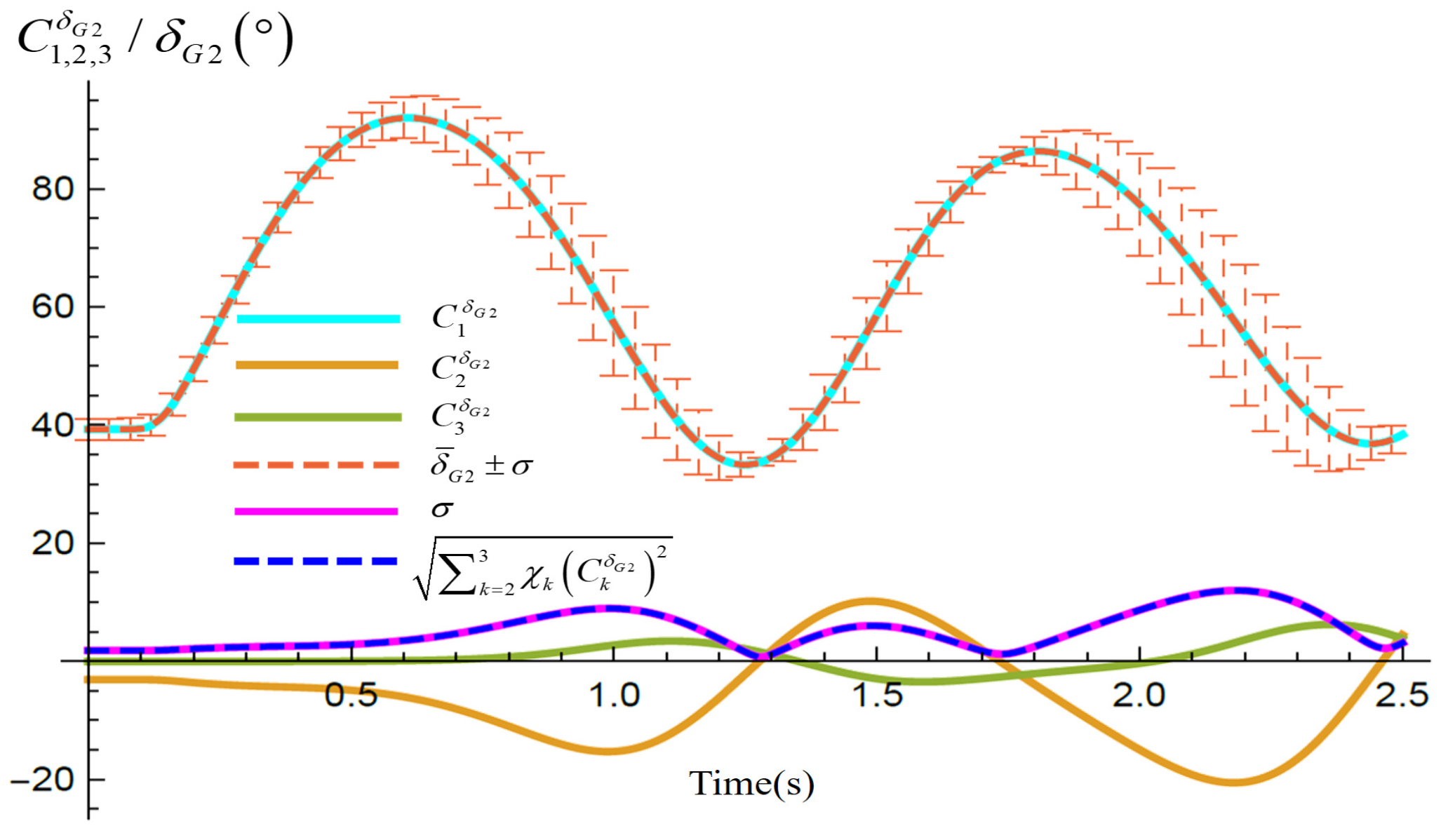
3.1. Polynomial Approximation of Transient Dynamics
3.2. Reformulatin of Transient Stability Constraints
- (1)
- The effect of uncertain parameters on the transient process can be explicitly evaluated by the transient stability constraint (20), which is a series of polynomials and easy to be evaluated in the Pa-TSCOPF problem.
- (2)
4. Solution of Algebraic Pa-NLP Model Based on the Stochastic Collocation Method
4.1. Parametric KKT Conditions of Algebraic Pa-NLP Model
4.2. Parametric Solution of Parametric TSCOPF Model
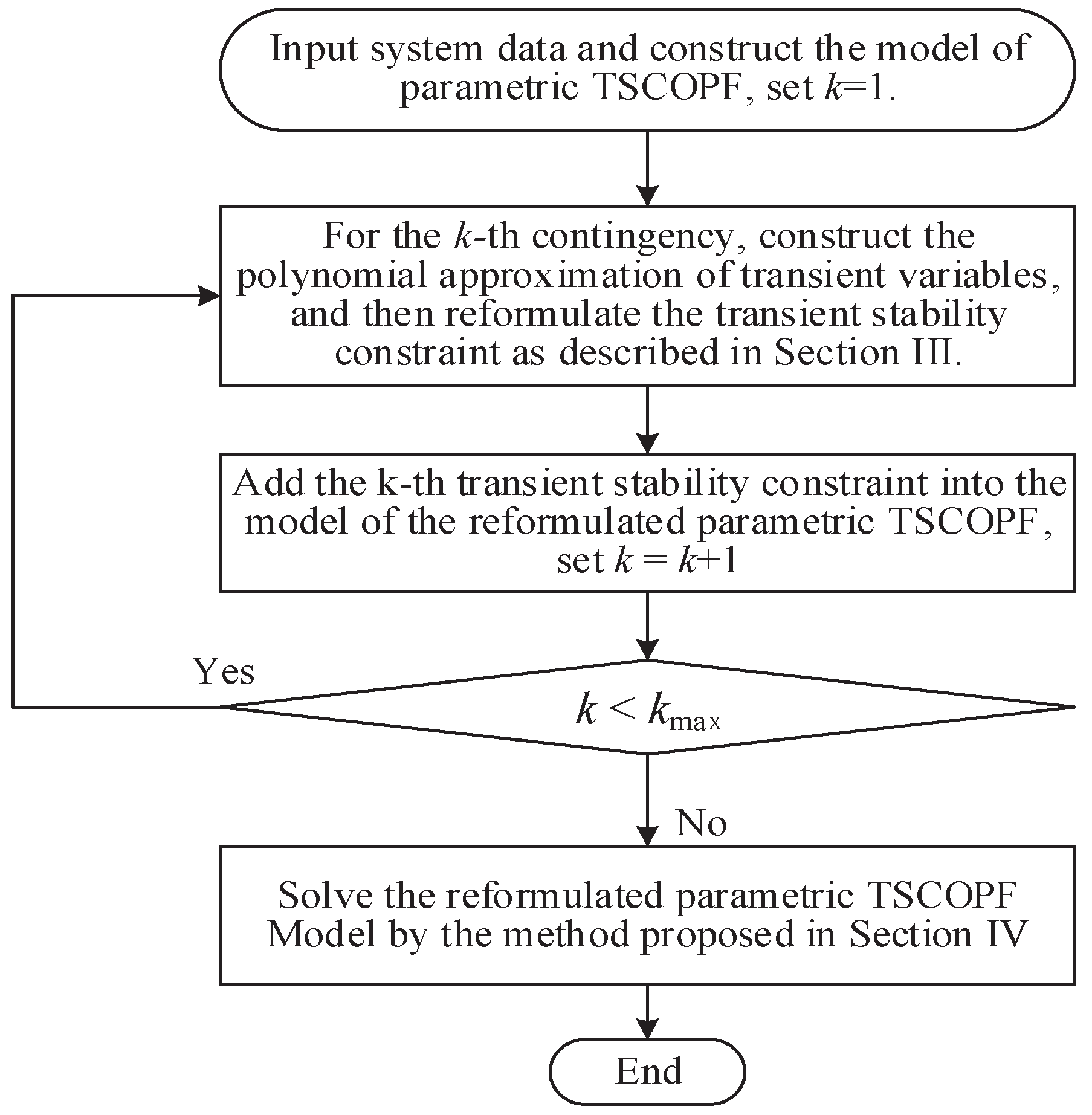
5. Procedures of Parametric TSCOPF in Multi-Contingency Case
- Step 1:
- Input system data and construct the parametric TSCOPF model. Determine the contingencies to be considered in the transient stability analysis and set .
- Step 2:
- Step 3:
- Add the k-th trainsient stability constraint into the reformulated model of the parametric TSCOPF, set .
- Step 4:
6. Case Studies
6.1. 3-Machine 9-Bus System Case
6.1.1. Case Settings
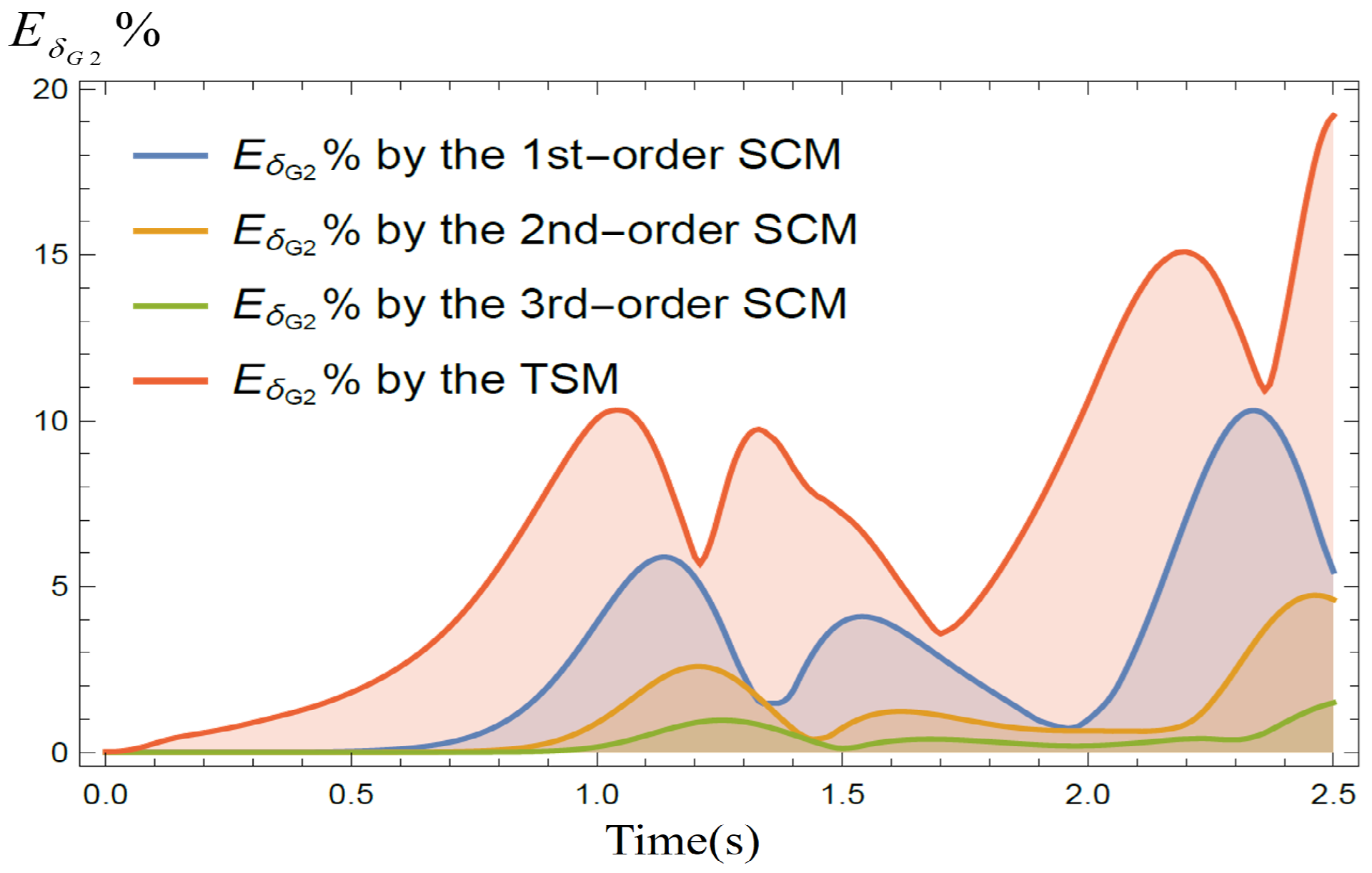
6.1.2. Approximation Error and Computation Time
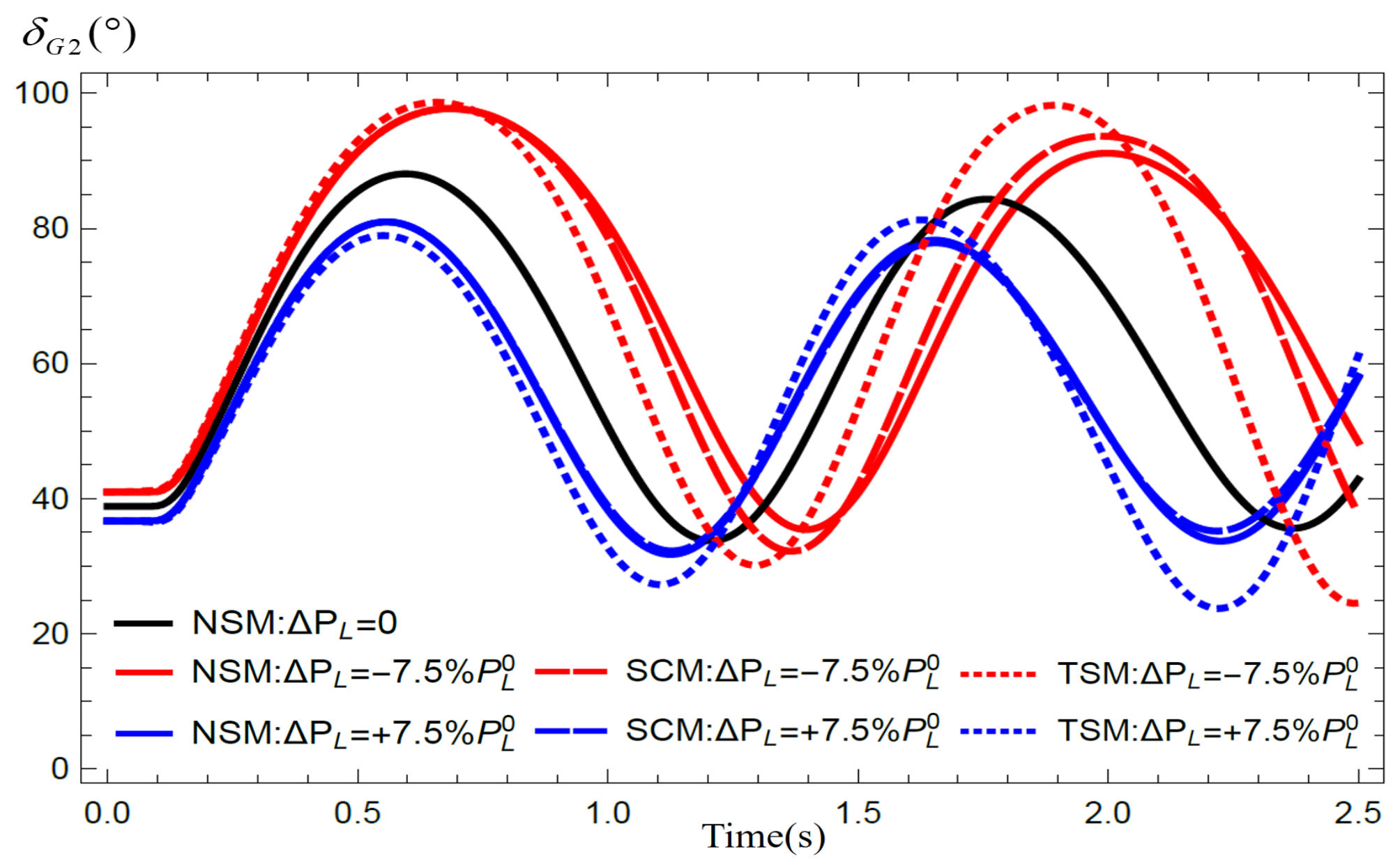
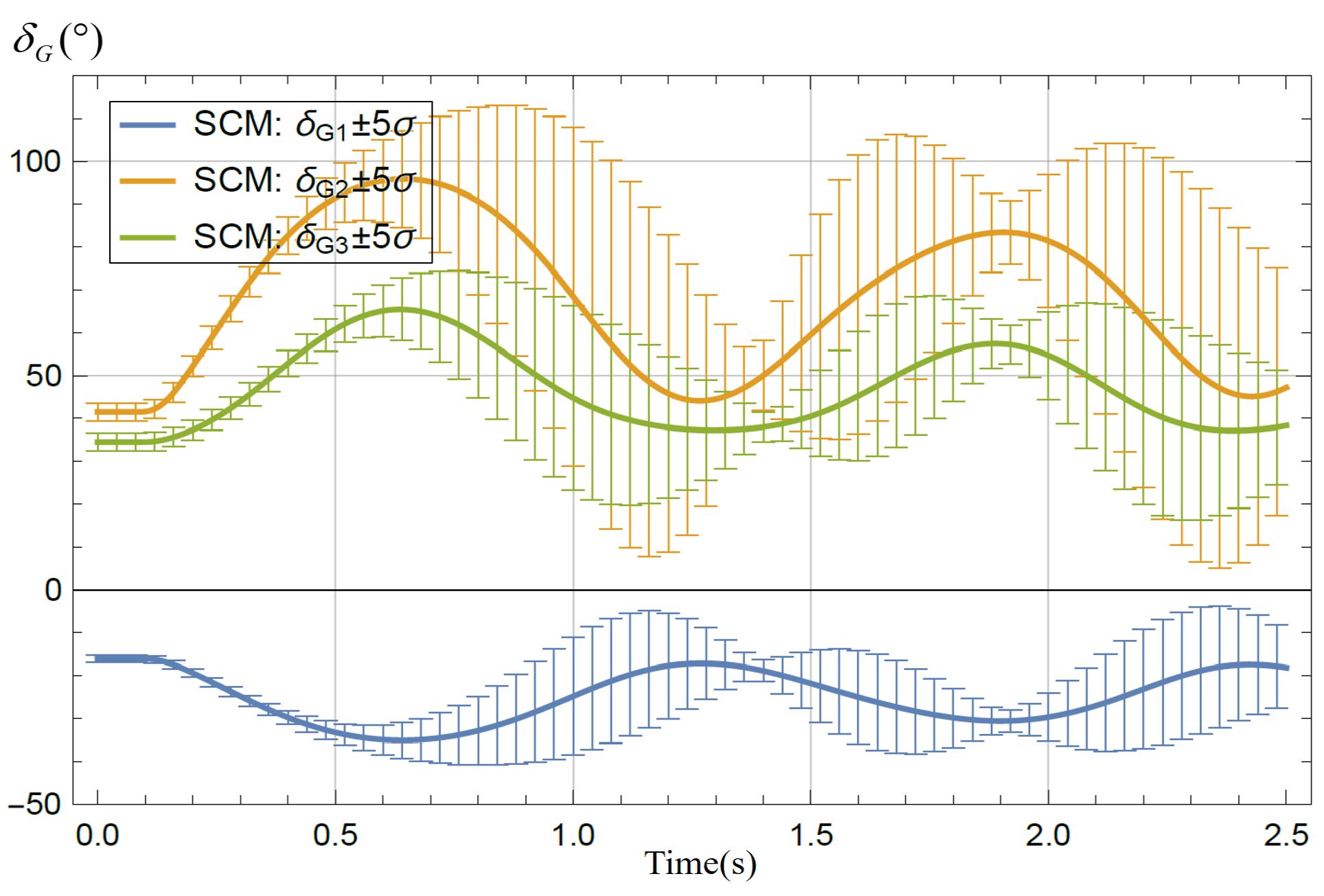
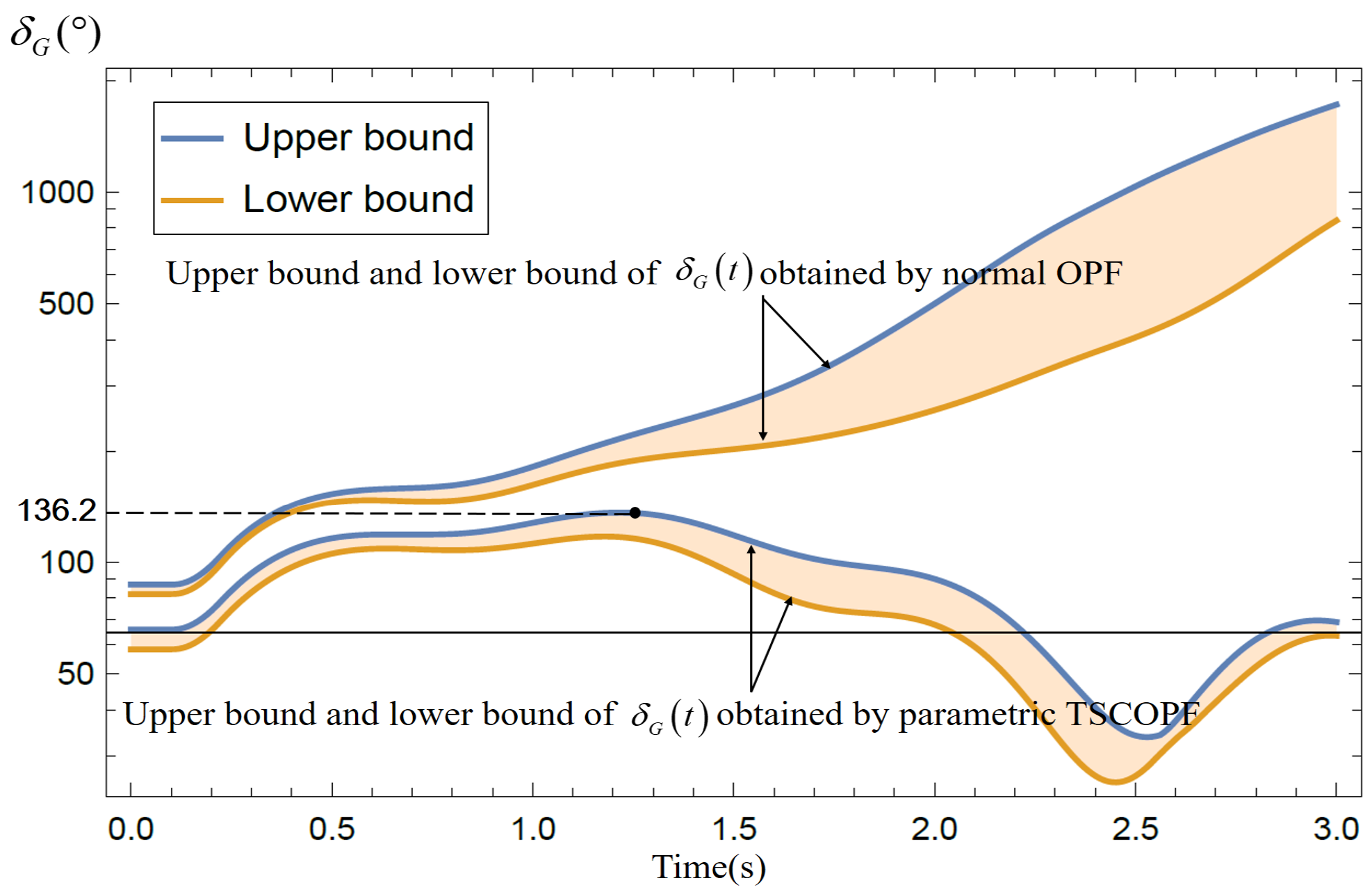
6.1.3. Transient Stability Analysis of the Initial Operation Point
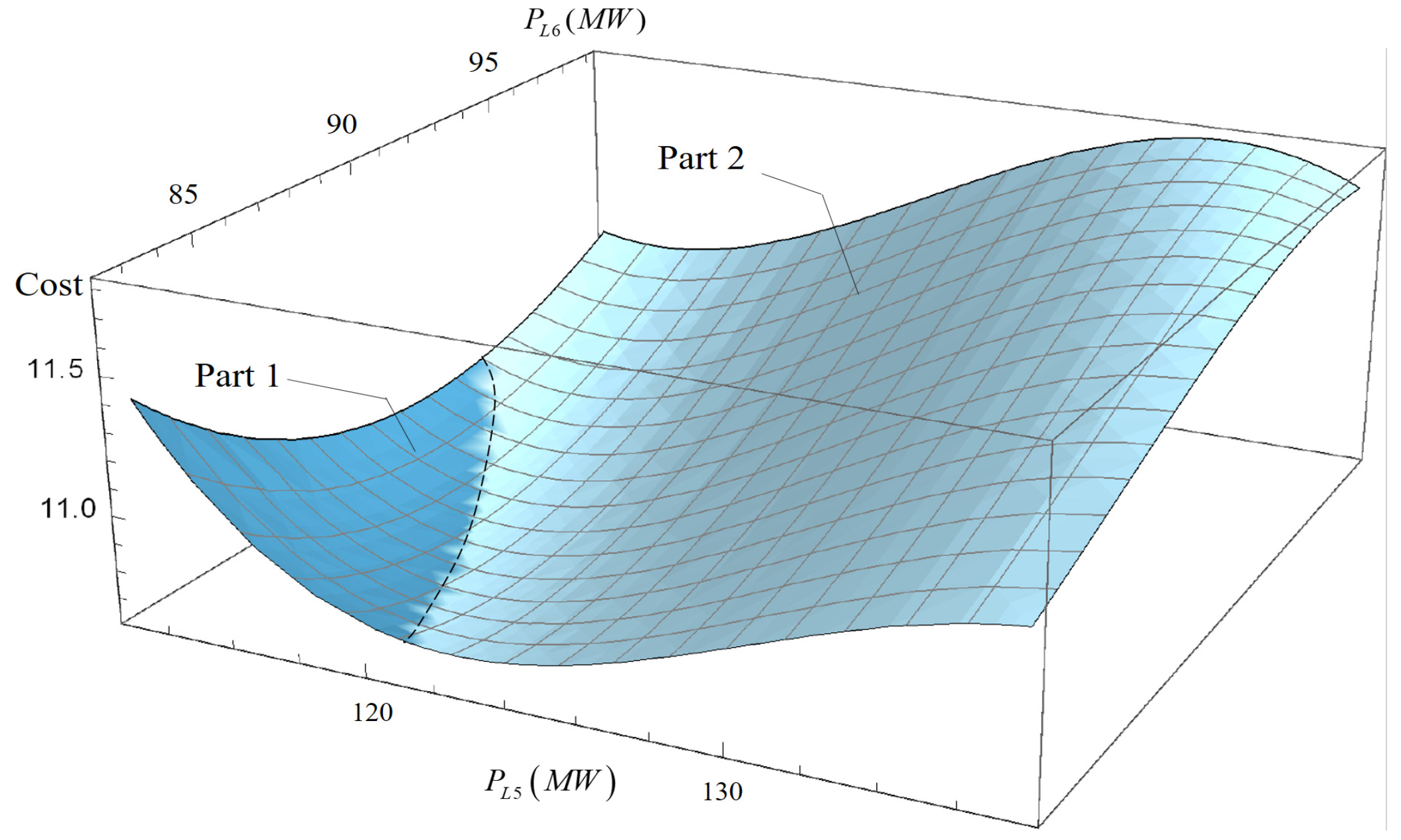
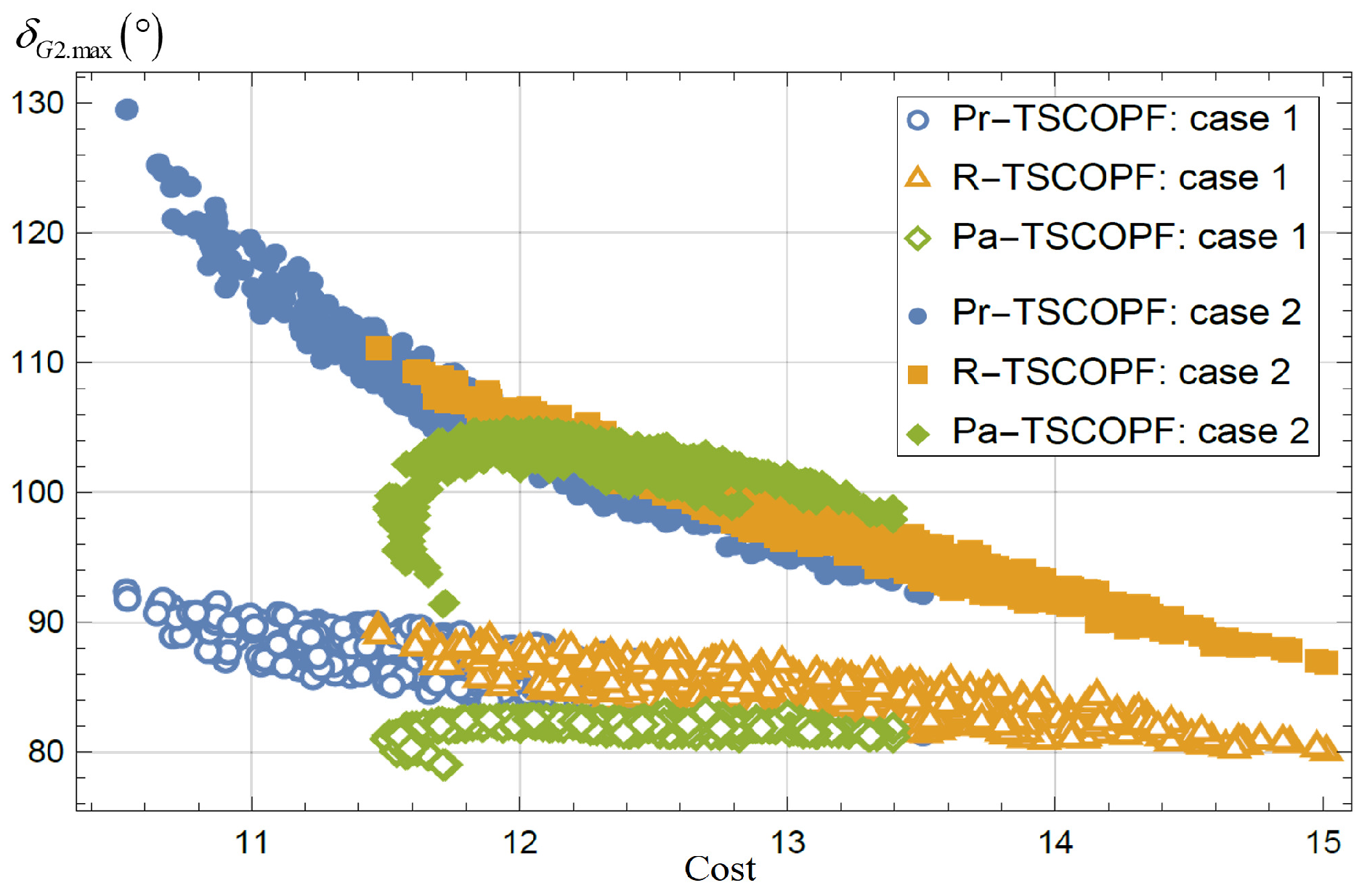
6.1.4. Solution of the Parametric TSCOPF Problem
6.2. IEEE 145-Bus System Case
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| The objective function. | |
| The probability calculation operator. | |
| State variables. | |
| Algebriac variables. | |
| Control parameters. | |
| Uncertain parameters. | |
| The dimension of and | |
| The dimension of and | |
| The vector of functions corresponding to the differential part of power system model. | |
| The vector of functions corresponding to the algebraic part of power system model. | |
| The initial values of and . | |
| The vector of functions corresponding to the steady-state inequality constraints. | |
| The lower bound of . | |
| The upper bound of . | |
| The vector of functions corresponding to the transient inequality constraints. | |
| The vector of functions corresponding to the inequality constraints. | |
| D | The domain of . |
| The expectation calculation operator. | |
| A fixed risk security level. | |
| The distribution function of uncertain parameters. | |
| The compact form of and . | |
| The domain of . | |
| The compact form of and . | |
| The compact form of and . | |
| The vector of time-varied undetermined coefficients. | |
| M | The number of collocation points. |
| The orthogonal multi-parameter polynomial basis function in terms of . | |
| The orthogonal single-parameter polynomial basis function in i-th dimension of . | |
| The subscript of k-th or j-th multi-parameter polynomial basis function in i-th | |
| dimension of . | |
| The subscript of k-th or j-th single-parameter polynomial basis function in i-th | |
| dimension of . | |
| N | The total degree of . |
| d | The dimension of . |
| The number of polynomial basis functions. | |
| The integration coefficient of the m-th collocation point. | |
| The density of orthogonal Legendre polynomial series. | |
| The mean of . | |
| The standard variance of . | |
| The active load at bus i. | |
| The relative swing angle of generator i. | |
| The number of total integration steps. | |
| The compact form of functions and . | |
| The barrier parameter of interior point method. | |
| The compact form of and . | |
| All Lagrange variables in KKT conditions. |
References
- Tang, L.; Sun, W. An Automated Transient Stability Constrained Optimal Power Flow Based on Trajectory Sensitivity Analysis. IEEE Trans. Power Syst. 2017, 32, 590–599. [Google Scholar] [CrossRef]
- Gan, D.; Thomas, R.J.; Zimmerman, R.D. Stability-constrained optimal power flow. IEEE Trans. Power Syst. 2000, 15, 535–540. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Dong, Z.Y.; Meng, K.; Zhao, J.H.; Wong, K.P. A Hybrid Method for Transient Stability-Constrained Optimal Power Flow Computation. IEEE Trans. Power Syst. 2012, 27, 1769–1777. [Google Scholar] [CrossRef]
- Pizano-Martínez, A.; Fuerte-Esquivel, C.R.; Zamora-Cárdenas, E.A.; Lozano-García, J.M. Directional Derivative-Based Transient Stability-Constrained Optimal Power Flow. IEEE Trans. Power Syst. 2017, 32, 3415–3426. [Google Scholar] [CrossRef]
- Yang, Y.; Qin, Z.; Liu, B.; Liu, H.; Hou, Y.; Wei, H. Parallel solution of transient stability constrained optimal power flow by exact optimality condition decomposition. IET Gener. Transm. Distrib. 2018, 12, 5858–5866. [Google Scholar] [CrossRef]
- Riaz, M.; Ahmad, S.; Hussain, I.; Naeem, M.; Mihet-Popa, L. Probabilistic Optimization Techniques in Smart Power System. Energies 2022, 15, 825. [Google Scholar] [CrossRef]
- Chen, S.; Hu, W.; Du, Y.; Wang, S.; Zhang, C.; Chen, Z. Three-stage relaxation-weightsum-correction based probabilistic reactive power optimization in the distribution network with multiple wind generators. Int. J. Electr. Power Energy Syst. 2022, 141, 108146. [Google Scholar] [CrossRef]
- Bian, J.; Wang, H.; Wang, L.; Li, G.; Wang, Z. Probabilistic Optimal Power Flow of an AC/DC System with a Multiport Current Flow Controller. CSEE J. Power Energy Syst. 2021, 7, 9. [Google Scholar]
- Huang, Z.; Zhang, Y.; Xie, S. Data-adaptive robust coordinated optimization of dynamic active and reactive power flow in active distribution networks. Renew. Energy 2022, 188, 164–183. [Google Scholar] [CrossRef]
- Khojasteh, M.; Faria, P.; Vale, Z. A Robust Model for Aggregated Bidding of Energy Storages and Wind Resources in the Joint Energy and Reserve Markets. Energy 2021, 238, 121735. [Google Scholar] [CrossRef]
- Liu, Z.; Wen, F.; Ledwich, G. Optimal Siting and Sizing of Distributed Generators in Distribution Systems Considering Uncertainties. IEEE Trans. Power Deliv. 2011, 26, 2541–2551. [Google Scholar] [CrossRef]
- Zhang, H.; Li, P. Chance Constrained Programming for Optimal Power Flow under Uncertainty. IEEE Trans. Power Syst. 2011, 26, 2417–2424. [Google Scholar] [CrossRef]
- Wang, J.; Shahidehpour, M.; Li, Z. Security-Constrained Unit Commitment with Volatile Wind Power Generation. IEEE Trans. Power Syst. 2008, 23, 1319–1327. [Google Scholar] [CrossRef]
- Wu, L.; Shahidehpour, M.; Li, T. Stochastic Security-Constrained Unit Commitment. IEEE Trans. Power Syst. 2007, 22, 800–811. [Google Scholar] [CrossRef]
- Wang, Q.; Guan, Y.; Wang, J. A Chance-Constrained Two-Stage Stochastic Program for Unit Commitment with Uncertain Wind Power Output. IEEE Trans. Power Syst. 2011, 27, 206–215. [Google Scholar] [CrossRef]
- Xia, S.; Luo, X.; Chan, K.W.; Zhou, M.; Li, G. Probabilistic Transient Stability Constrained Optimal Power Flow for Power Systems with Multiple Correlated Uncertain Wind Generations. IEEE Trans. Power Syst. 2016, 7, 1133–1144. [Google Scholar] [CrossRef]
- Papavasiliou, A.; Oren, S.S.; O’Neill, R.P. Reserve Requirements for Wind Power Integration: A Scenario-Based Stochastic Programming Framework. IEEE Trans. Power Syst. 2011, 26, 2197–2206. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi-Khatir, A.; Conejo, A.J.; Cherkaoui, R. Multi-Area Energy and Reserve Dispatch under Wind Uncertainty and Equipment Failures. IEEE Trans. Power Syst. 2013, 28, 4373–4383. [Google Scholar] [CrossRef]
- Peng, C.; Xie, P.; Pan, L.; Yu, R. Flexible Robust Optimization Dispatch for Hybrid Wind/Photovoltaic/Hydro/Thermal Power System. IEEE Trans. Smart Grid 2016, 7, 751–762. [Google Scholar] [CrossRef]
- Lorca, A.; Sun, X.A. Adaptive Robust Optimization with Dynamic Uncertainty Sets for Multi-Period Economic Dispatch under Significant Wind. IEEE Trans. Power Syst. 2015, 30, 1702–1713. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.; Chen, J.; Zhang, B.; Sun, H. A Robust Wind Power Optimization Method for Look-Ahead Power Dispatch. IEEE Trans. Sustain. Energy 2014, 5, 507–515. [Google Scholar] [CrossRef]
- Jabr, R.A. Adjustable Robust OPF with Renewable Energy Sources. IEEE Trans. Power Syst. 2013, 28, 4742–4751. [Google Scholar] [CrossRef]
- Bertsimas, D.; Litvinov, E.; Sun, X.A.; Zhao, J.; Zheng, T. Adaptive Robust Optimization for the Security Constrained Unit Commitment Problem. IEEE Trans. Power Syst. 2013, 28, 52–63. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, T.; Wang, P.; Gooi, H.B.; Wu, L.; Liu, Y.; Ye, J. Optimal Operation of Multimicrogrids via Cooperative Energy and Reserve Scheduling. IEEE Trans. Ind. Inf. 2018, 14, 3459–3468. [Google Scholar] [CrossRef]
- Hajian, M.; Rosehart, W.D.; Zareipour, H. Probabilistic Power Flow by Monte Carlo Simulation with Latin Supercube Sampling. IEEE Trans. Power Syst. 2013, 28, 1550–1559. [Google Scholar] [CrossRef]
- Hiskens, I.A.; Pai, M.A. Trajectory sensitivity analysis of hybrid systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2000, 47, 204–220. [Google Scholar] [CrossRef] [Green Version]
- Hiskens, I.A.; Alseddiqui, J. Sensitivity, Approximation, and Uncertainty in Power System Dynamic Simulation. IEEE Trans. Power Syst. 2006, 21, 1808–1820. [Google Scholar] [CrossRef] [Green Version]
- Shen, D.; Wu, H.; Xia, B.; Gan, D. Polynomial Chaos Expansion for Parametric Problems in Engineering Systems: A Review. IEEE Syst. J. 2020, 14, 4500–4514. [Google Scholar] [CrossRef]
- Xiu, D. Numerical Methods for Stochastic Computations: A Spectral Method Approach; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Hockenberry, J.R.; Lesieutre, B.C. Evaluation of uncertainty in dynamic simulations of power system models: The probabilistic collocation method. IEEE Trans. Power Syst. 2004, 19, 1483–1491. [Google Scholar] [CrossRef] [Green Version]
- Xia, B.; Wu, H.; Qiu, Y.; Lou, B.; Song, Y. A Galerkin Method-Based Polynomial Approximation for Parametric Problems in Power System Transient Analysis. IEEE Trans. Power Syst. 2019, 34, 1620–1629. [Google Scholar] [CrossRef]
- Zhou, Y.; Wu, H.; Gu, C.; Song, Y. A Novel Method of Polynomial Approximation for Parametric Problems in Power Systems. IEEE Trans. Power Syst. 2017, 32, 32983307. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Lin, J.; Liu, F.; Song, Y. Explicit MPC Based on the Galerkin Method for AGC Considering Volatile Generations. IEEE Trans. Power Syst. 2020, 35, 462–473. [Google Scholar] [CrossRef]
- Kaintura, A.; Dhaene, T.; Spina, D. Review of polynomial chaos based methods for uncertainty quantification in modern integrated circuits. Electronics 2018, 7, 30. [Google Scholar] [CrossRef] [Green Version]
- Najm, H.N. Uncertainty quantification and polynomial chaos techniques in computational fluid dynamics. Annu. Rev. Fluid Mech. 2009, 41, 35–52. [Google Scholar] [CrossRef]
- Kim, K.-K.K.; Shen, D.E.; Nagy, Z.K.; Braatz, R.D. Wiener’s polynomial chaos for the analysis and control of nonlinear dynamical systems with probabilistic uncertainties [historical perspectives]. IEEE Control Syst. Mag. 2013, 33, 58–67. [Google Scholar]
- Xiu, D.; Karniadakis, G.E. The Wiener–Askey polynomial chaos for stochastic differential equations. SIAM J. Sci. Comput. 2002, 24, 619–644. [Google Scholar] [CrossRef]
- Xiu, D.; Hesthaven, J.S. High-order collocation methods for differential equations with random inputs. SIAM J. Sci. Comput. 2005, 27, 1118–1139. [Google Scholar] [CrossRef]
- Qiu, Y.; Wu, H.; Song, Y.; Wang, J. Global Approximation of Static Voltage Stability Region Boundaries Considering Generator Reactive Power Limits. IEEE Trans. Power Syst. 2018, 33, 5682–5691. [Google Scholar] [CrossRef]
- Wu, Y.C.; Debs, A.S.; Marsten, R.E. A direct nonlinear predictor-corrector primal-dual interior point algorithm for optimal power flows. IEEE Trans. Power Syst. 1994, 9, 876–883. [Google Scholar]
- Power System Test Case Archive, University of Washington (2021, January) IEEE 145-Bus System. Available online: http://labs.ece.uw.edu/pstca/dyn50/pg_tcadd50.html (accessed on 5 May 2022).
- Ekanayake, J.B.; Holdsworth, L.; Wu, X.; Jenkins, N. Dynamic modeling of doubly fed induction generator wind turbines. IEEE Trans. Power Syst. 2003, 18, 803–809. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | 1 | 1 | 1 | 2 | Total Time |
|---|---|---|---|---|---|
| TSM | - | 8.548 s | |||
| SCM, | 7 | 12.125 s | |||
| SCM, | 25 | 45.75 s | |||
| SCM, | 69 | 136.766 s |
| Method | Mean of | Mean of Cost | Out-of-Limit Probability | ||
|---|---|---|---|---|---|
| Case1 | Case2 | Case1 | Case2 | ||
| Pr-TSCOPF | 12.35 | 11.8% | 10.4% | ||
| R-TSCOPF | 13.11 | 2.2% | 0.4% | ||
| Pa-TSCOPF | 12.34 | 0.2% | 0.0% | ||
| Control Paramter | Parametric Control Scheme |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, B.; Wu, H.; Yang, W.; Cao, L.; Song, Y. Parametric Transient Stability Constrained Optimal Power Flow Solved by Polynomial Approximation Based on the Stochastic Collocation Method. Energies 2022, 15, 4127. https://doi.org/10.3390/en15114127
Xia B, Wu H, Yang W, Cao L, Song Y. Parametric Transient Stability Constrained Optimal Power Flow Solved by Polynomial Approximation Based on the Stochastic Collocation Method. Energies. 2022; 15(11):4127. https://doi.org/10.3390/en15114127
Chicago/Turabian StyleXia, Bingqing, Hao Wu, Wenbin Yang, Lu Cao, and Yonghua Song. 2022. "Parametric Transient Stability Constrained Optimal Power Flow Solved by Polynomial Approximation Based on the Stochastic Collocation Method" Energies 15, no. 11: 4127. https://doi.org/10.3390/en15114127