
Simulative Study to Reduce DC-Link Capacitor of Drive Train for Electric Vehicles

 , , , and
, , , and 
Abstract
:1. Introduction
2. Simulative Modelling Strategy
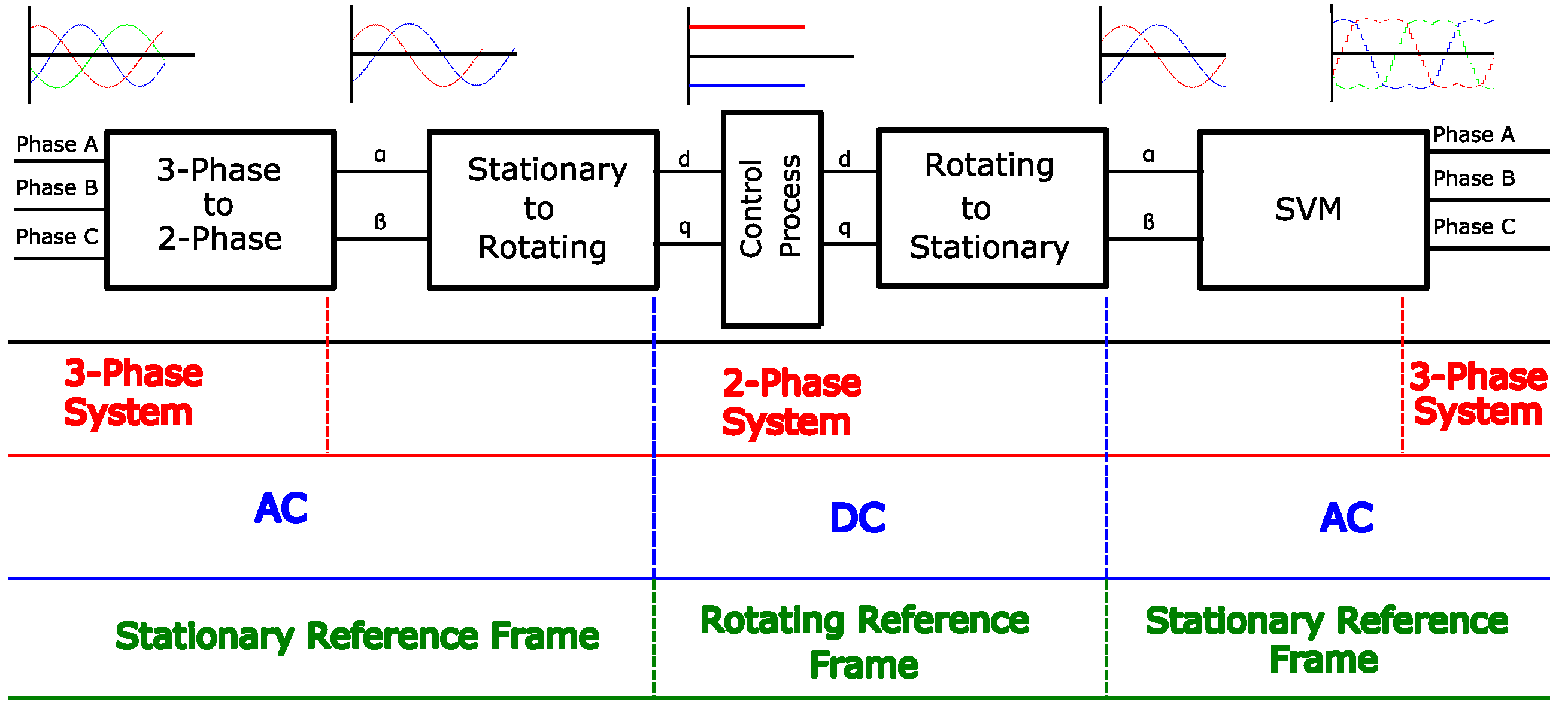
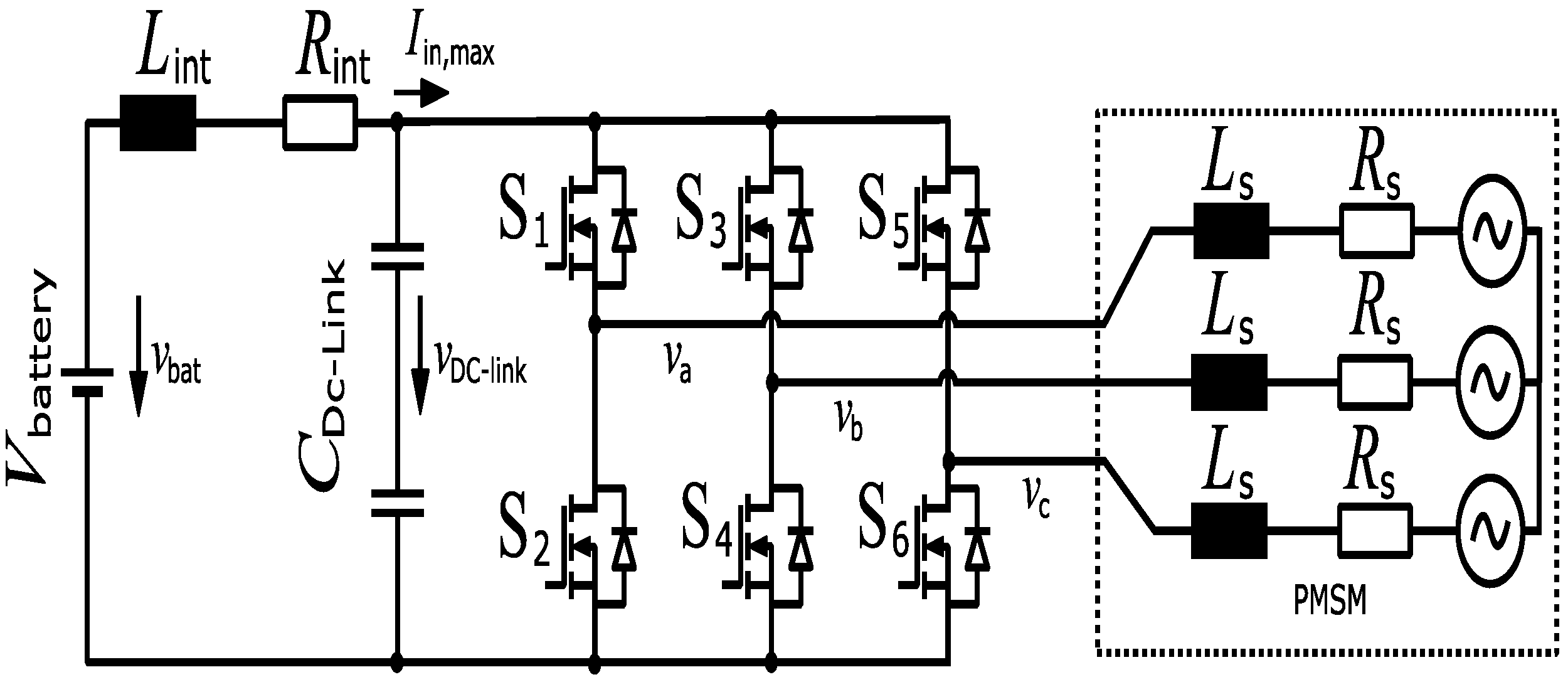
2.1. Mathematical Modelling
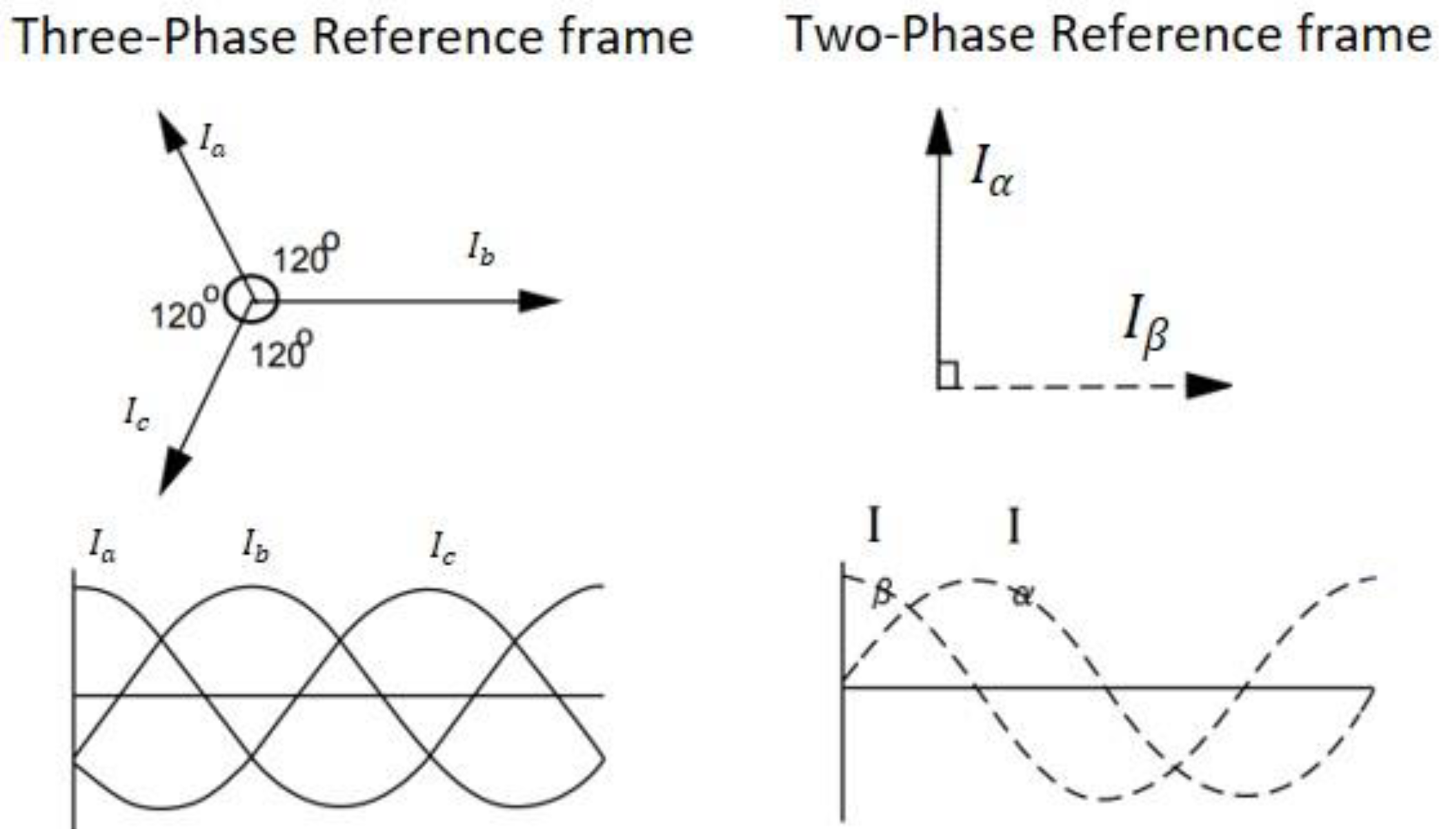
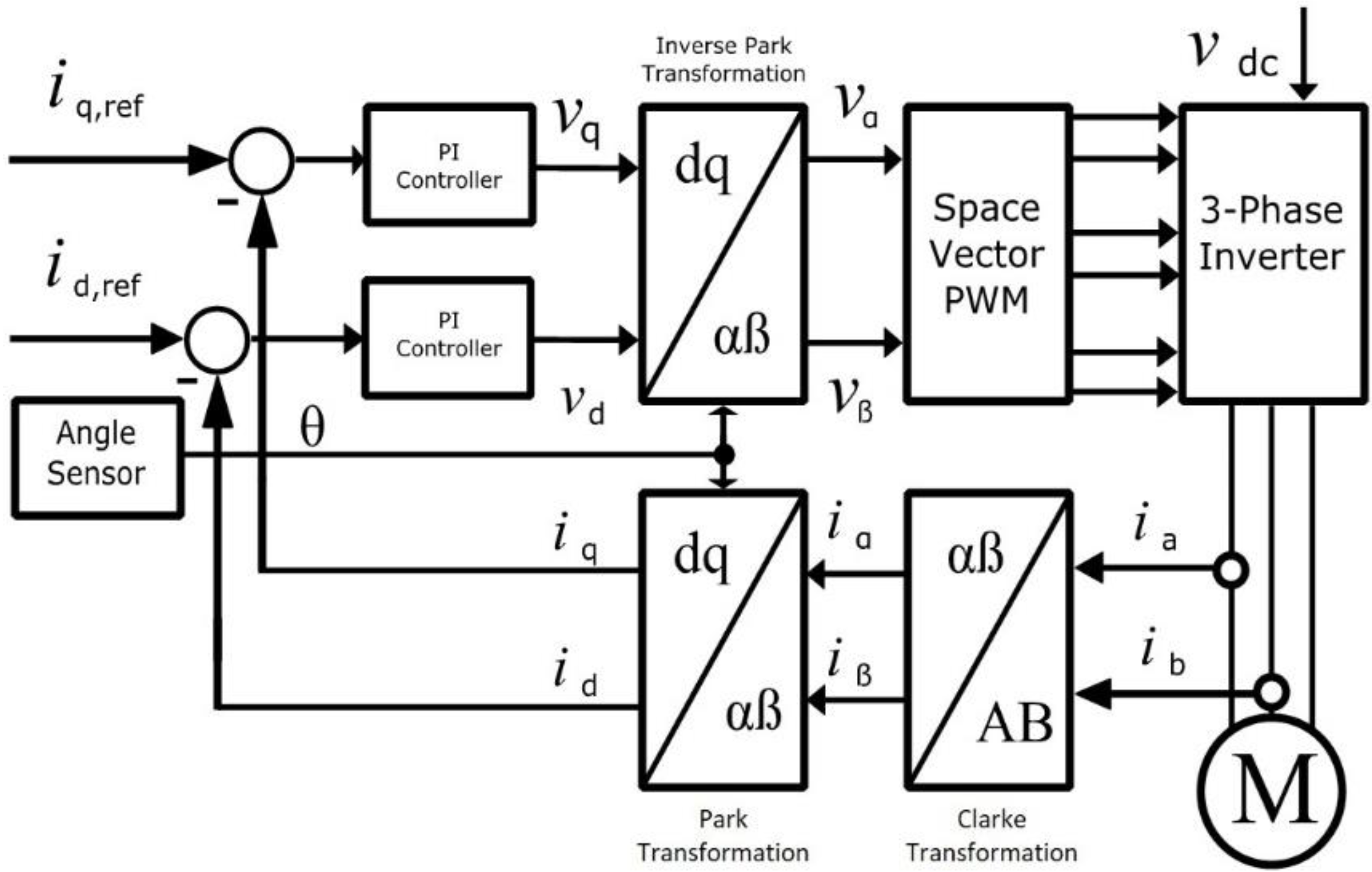
- Clarke Transformation;
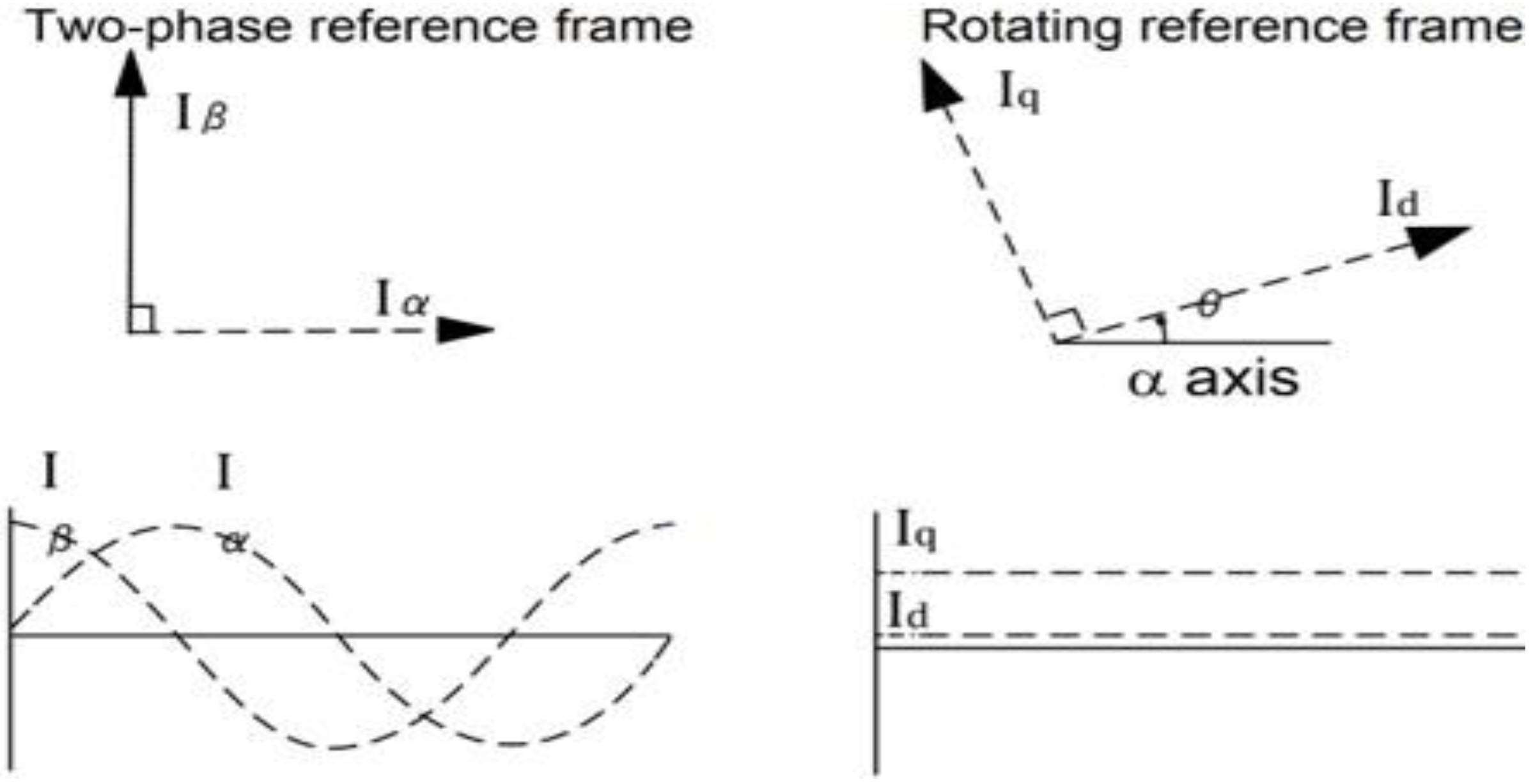
- Park Transformation.
2.1.1. Clarke Transformation
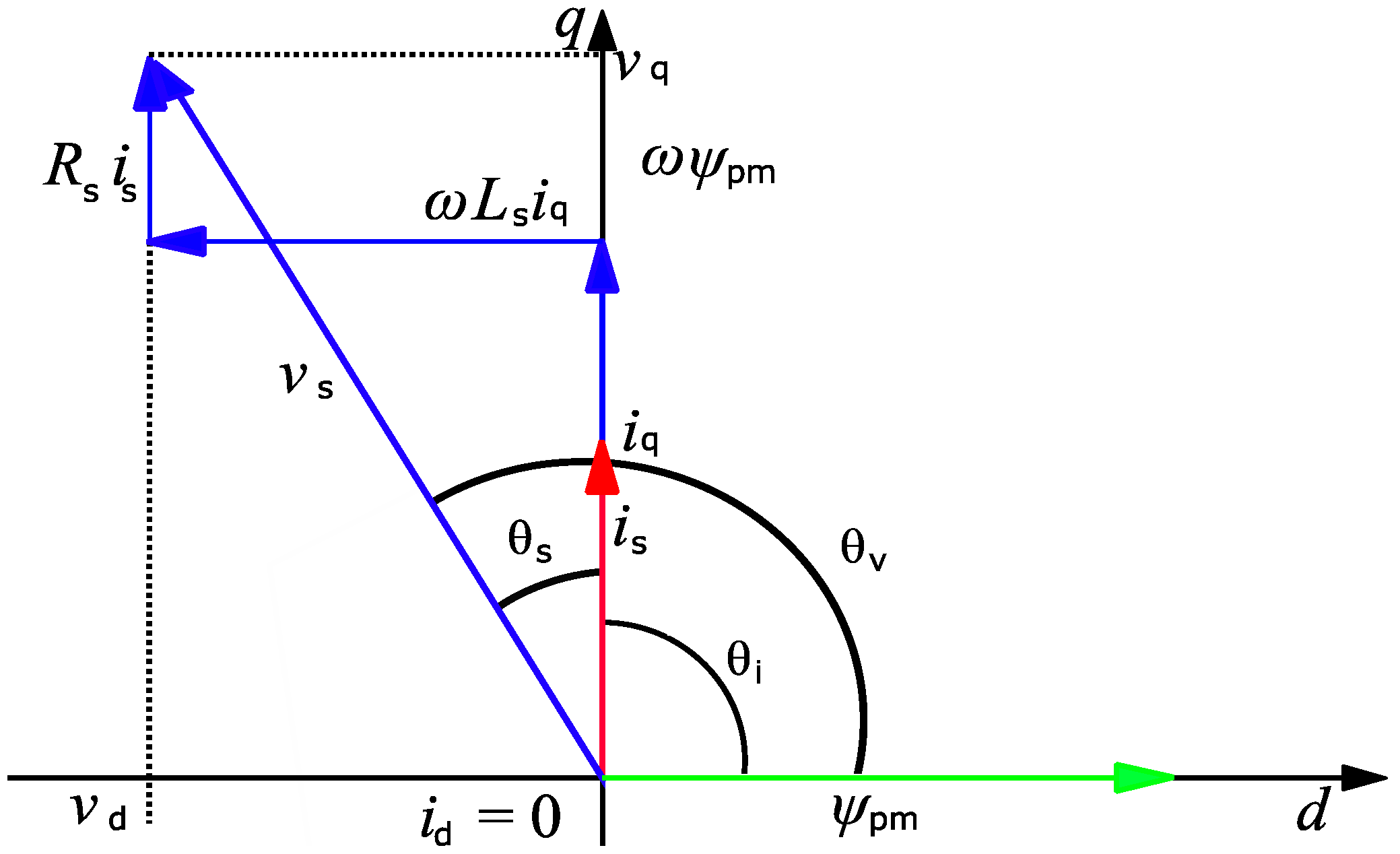
2.1.2. Park Transformation
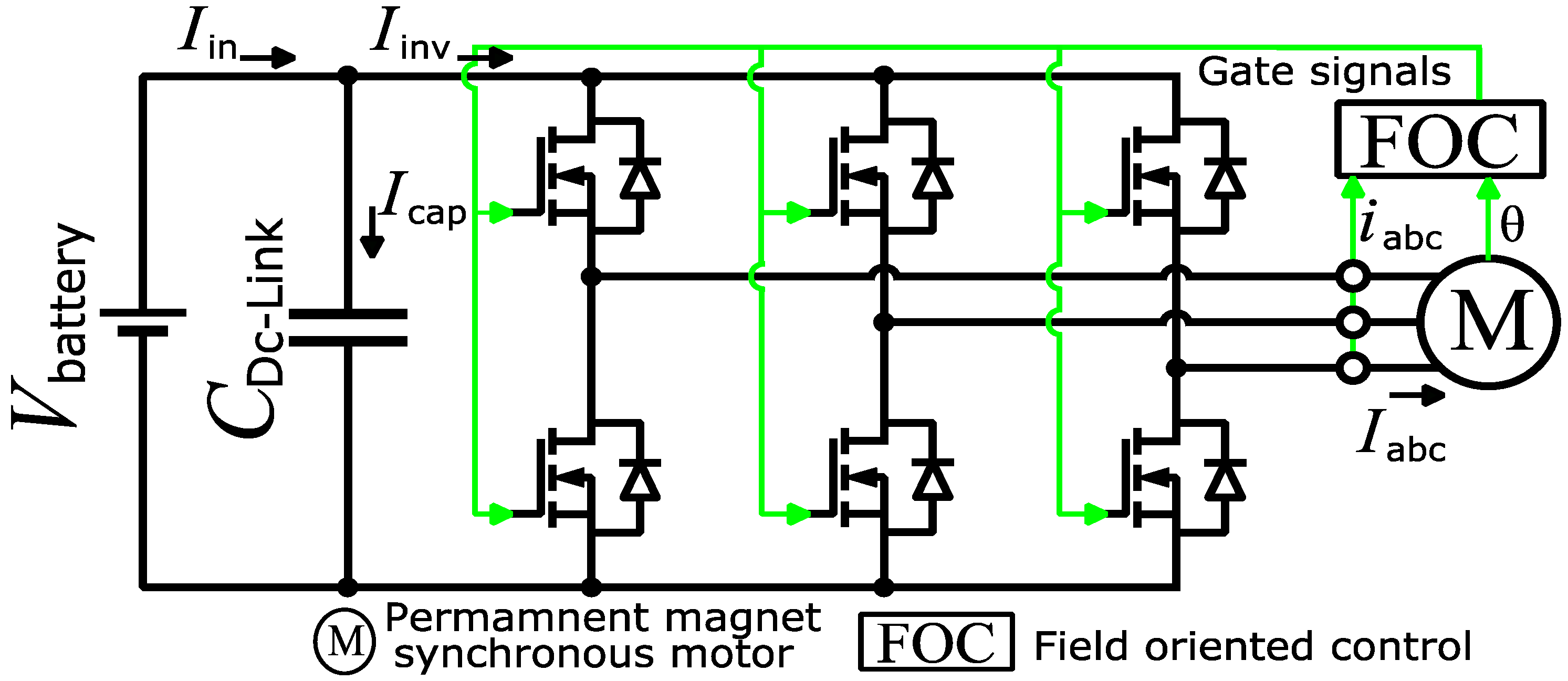
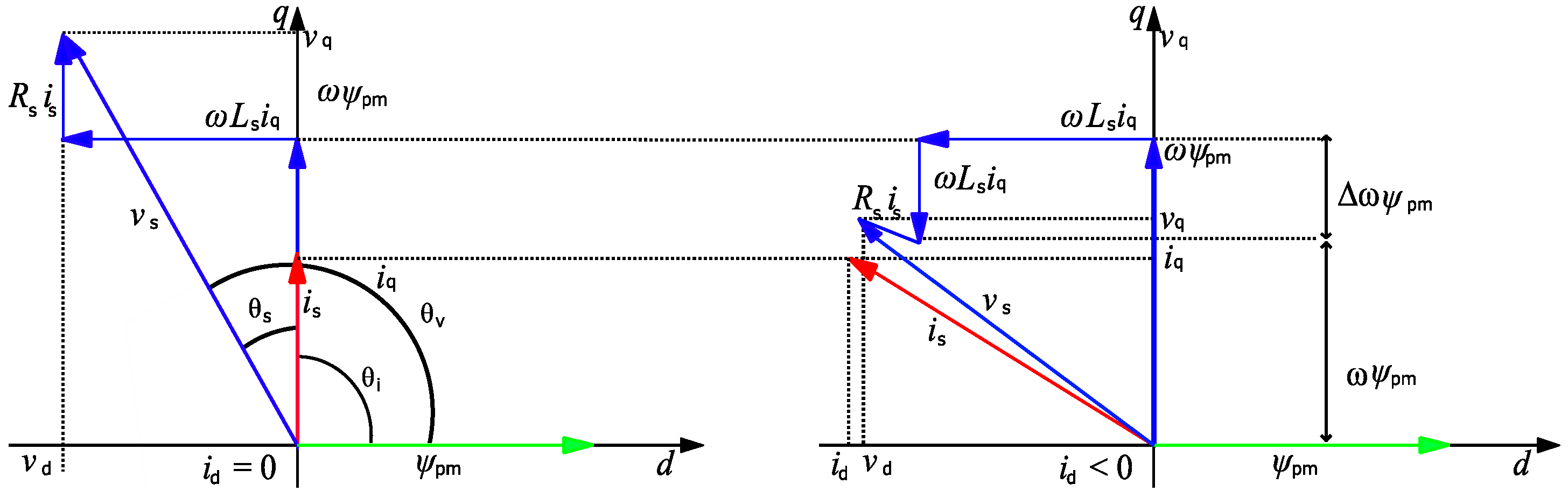
2.2. Field-Orientation Control
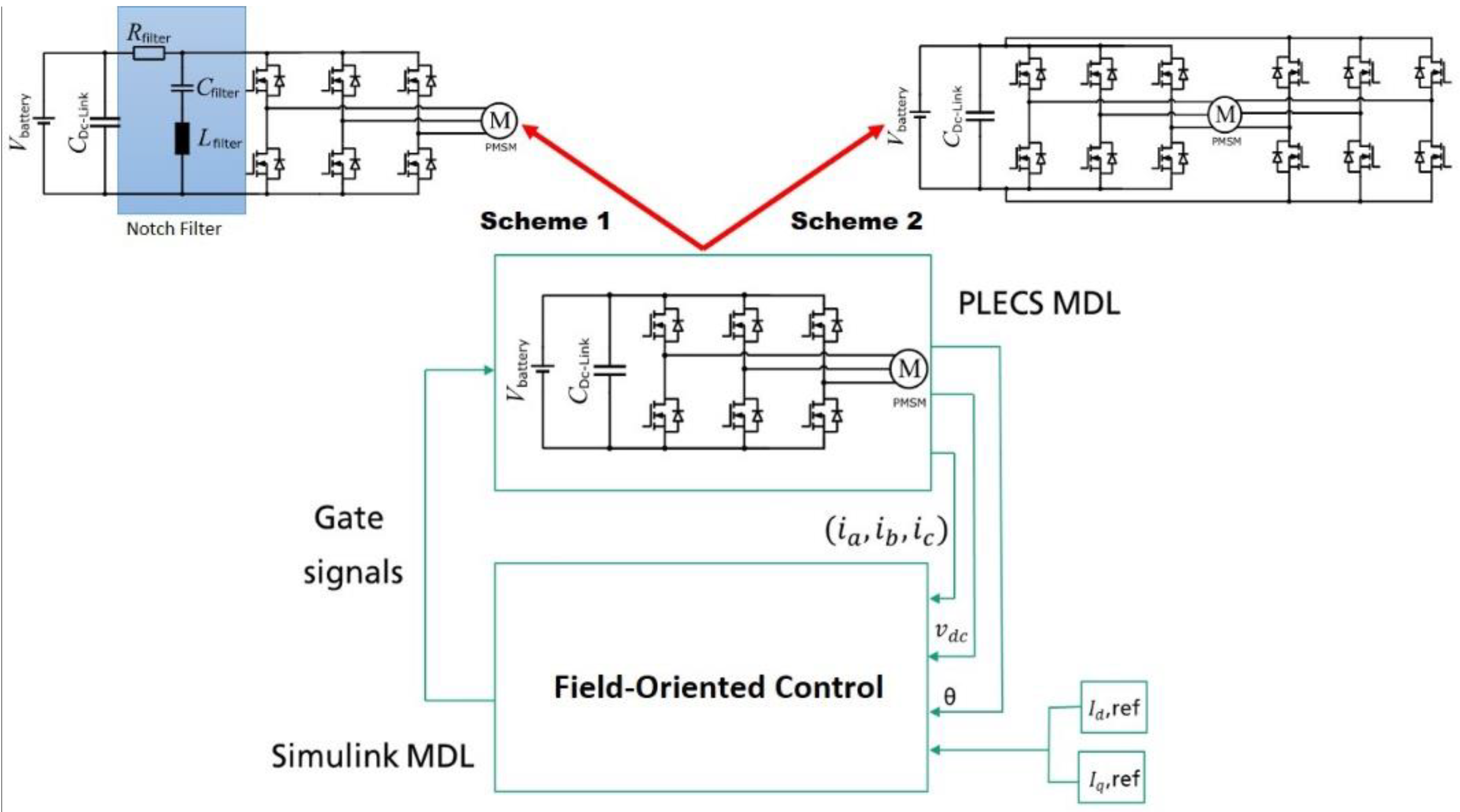
2.3. Simulation Modelling
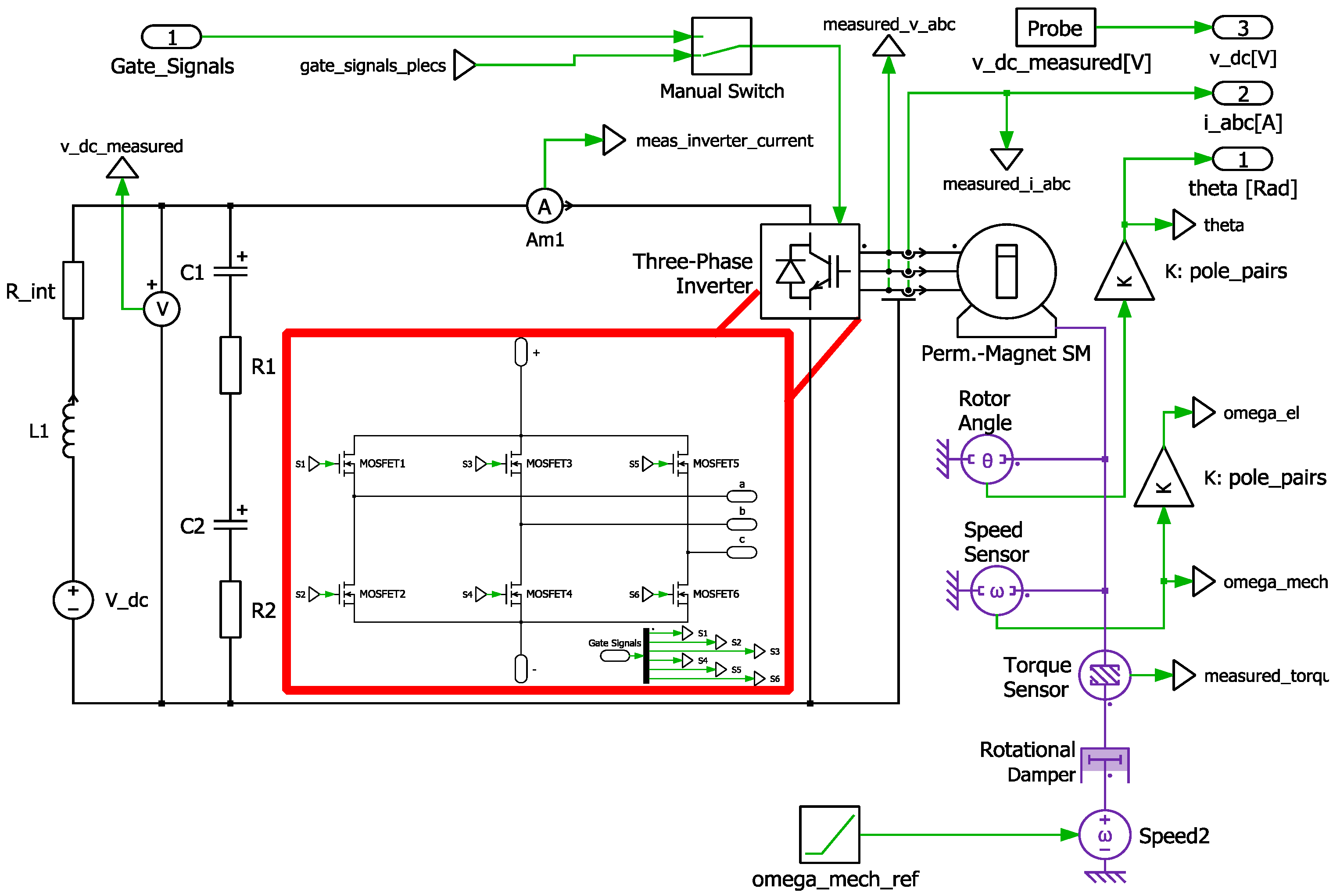
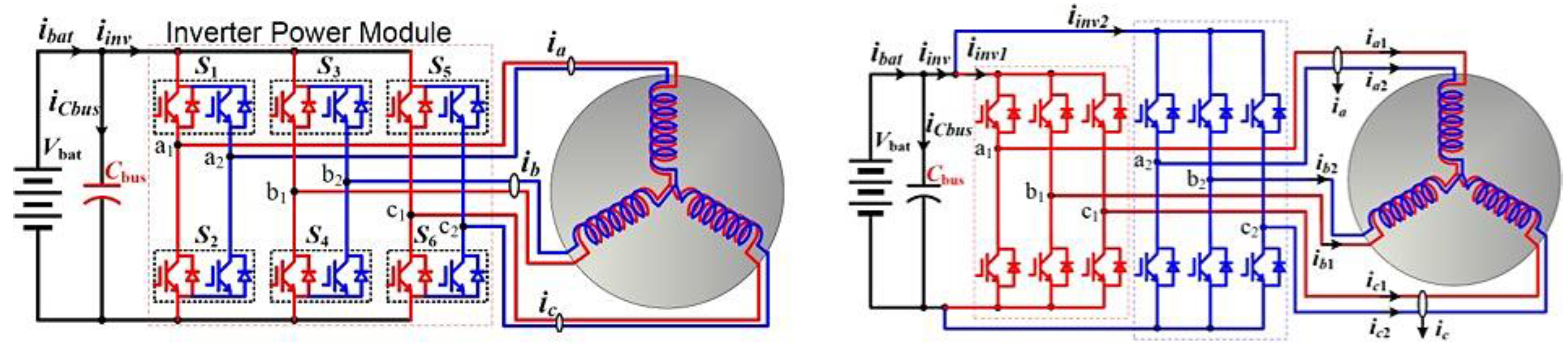
2.3.1. PLECS Model
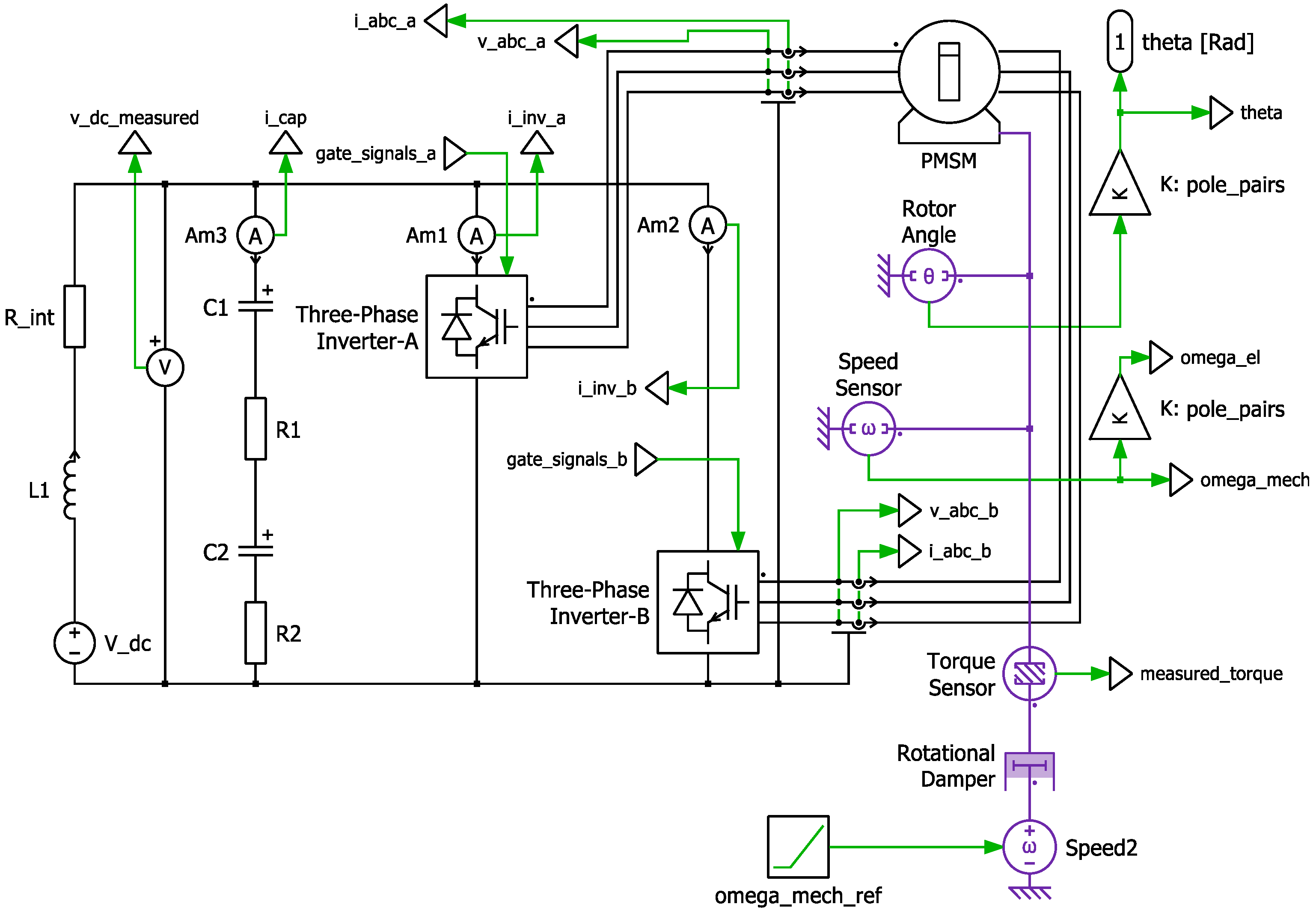
2.3.2. SIMULINK Model
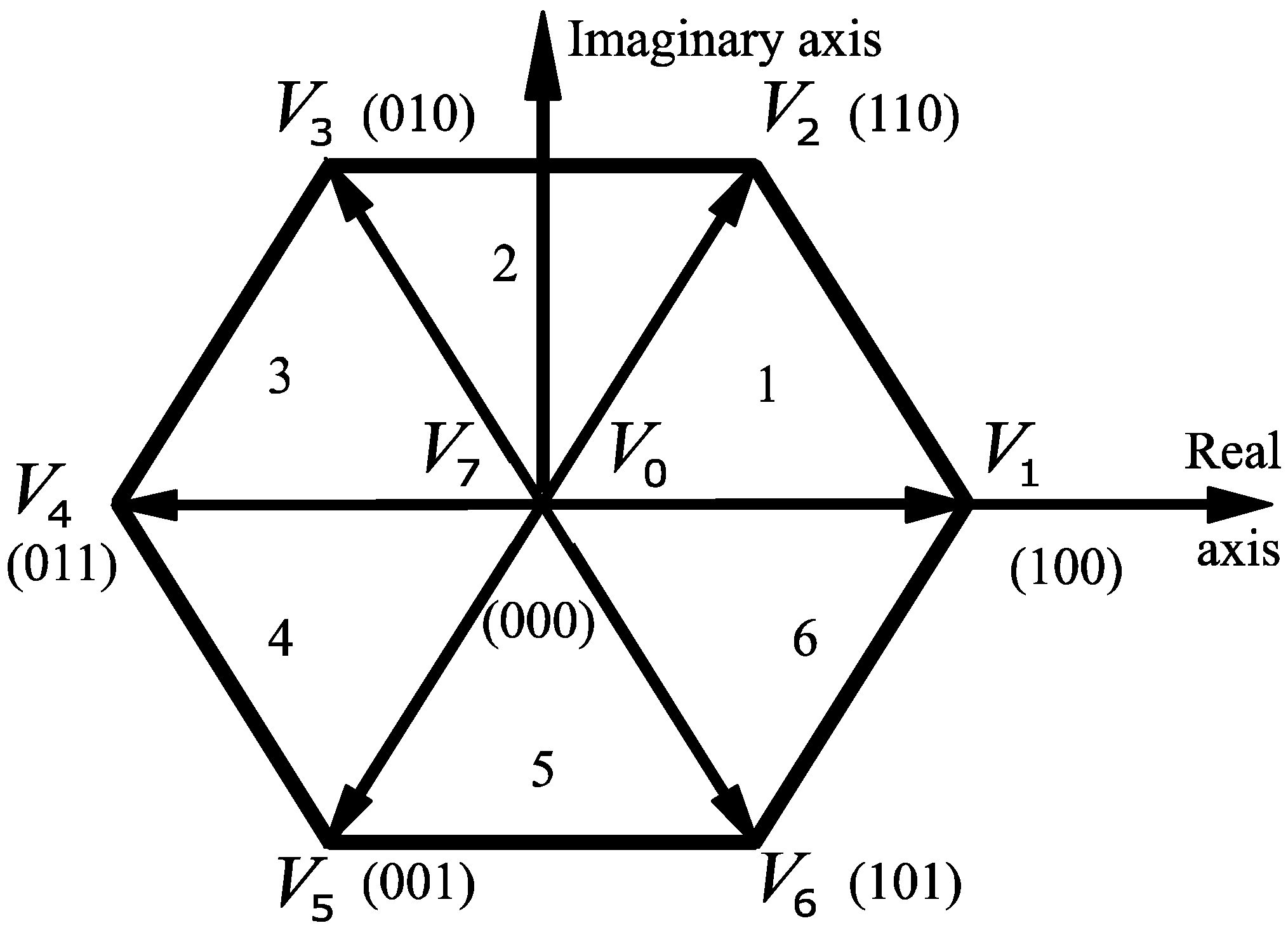
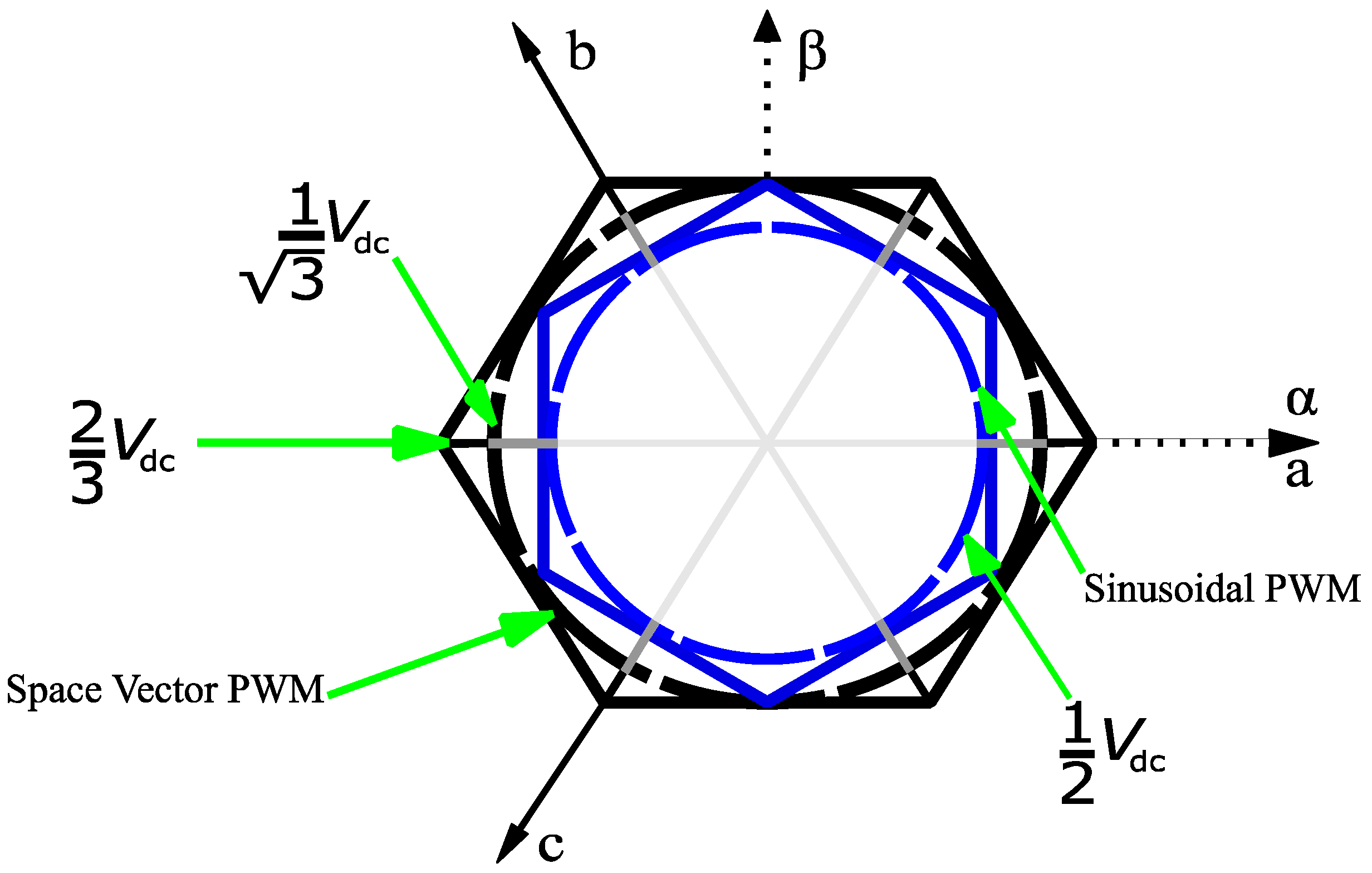
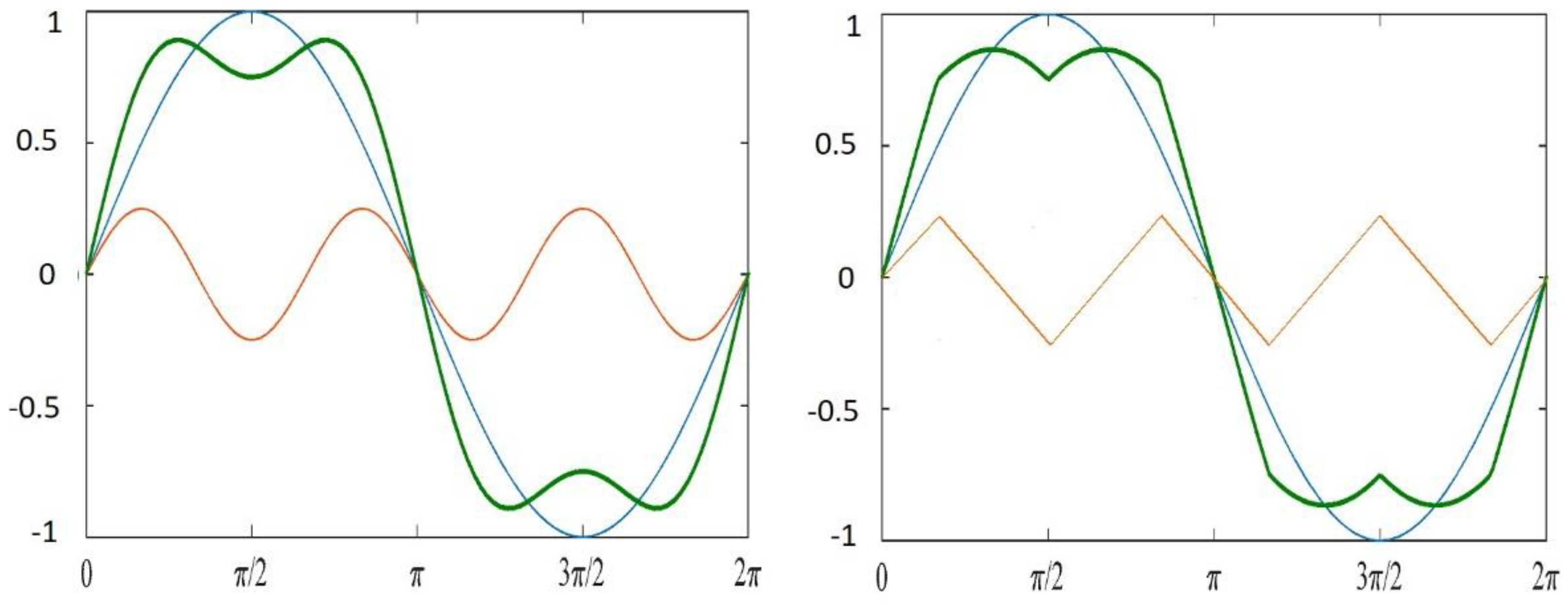
2.3.3. Designing of Modulation Parameters
2.4. Simulation Modelling
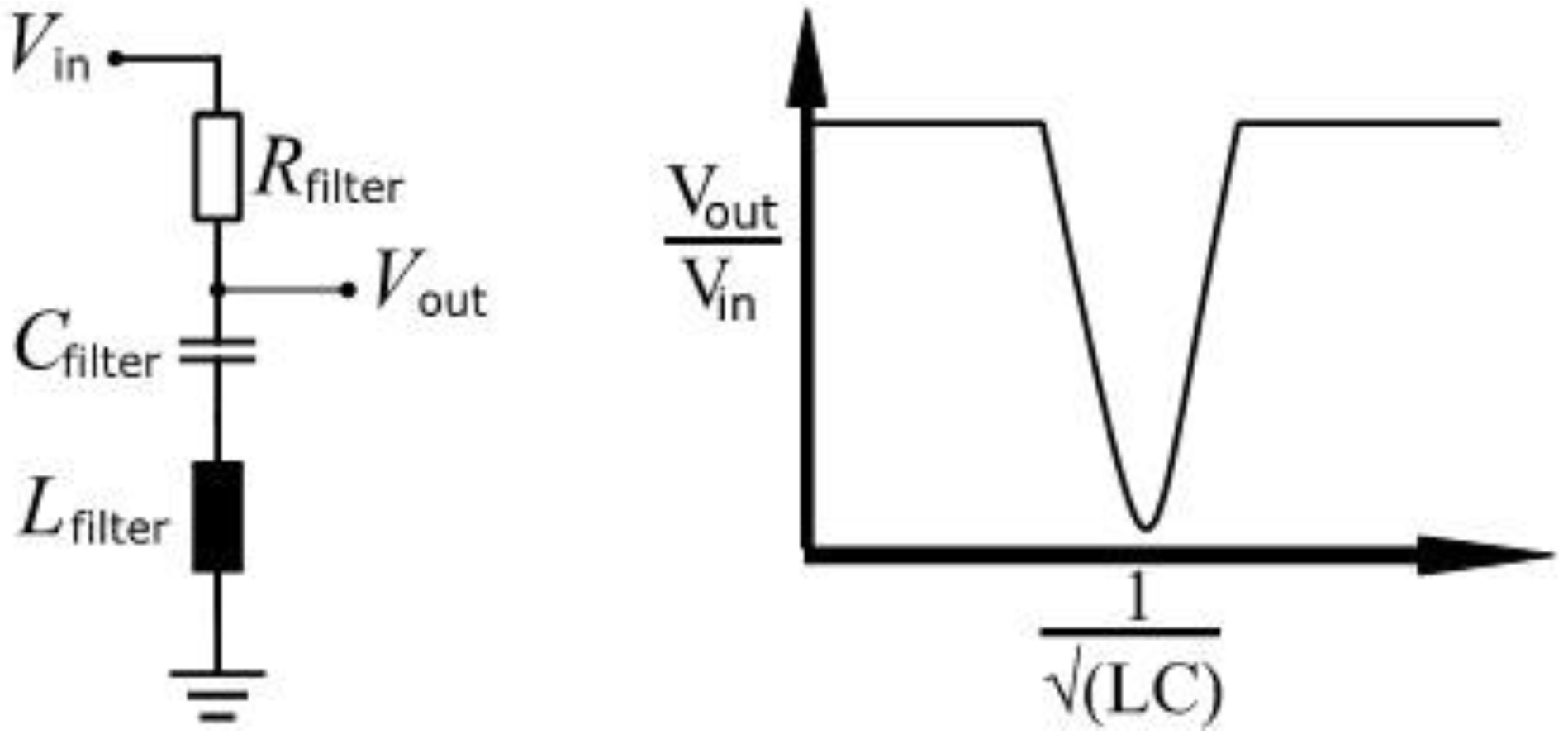
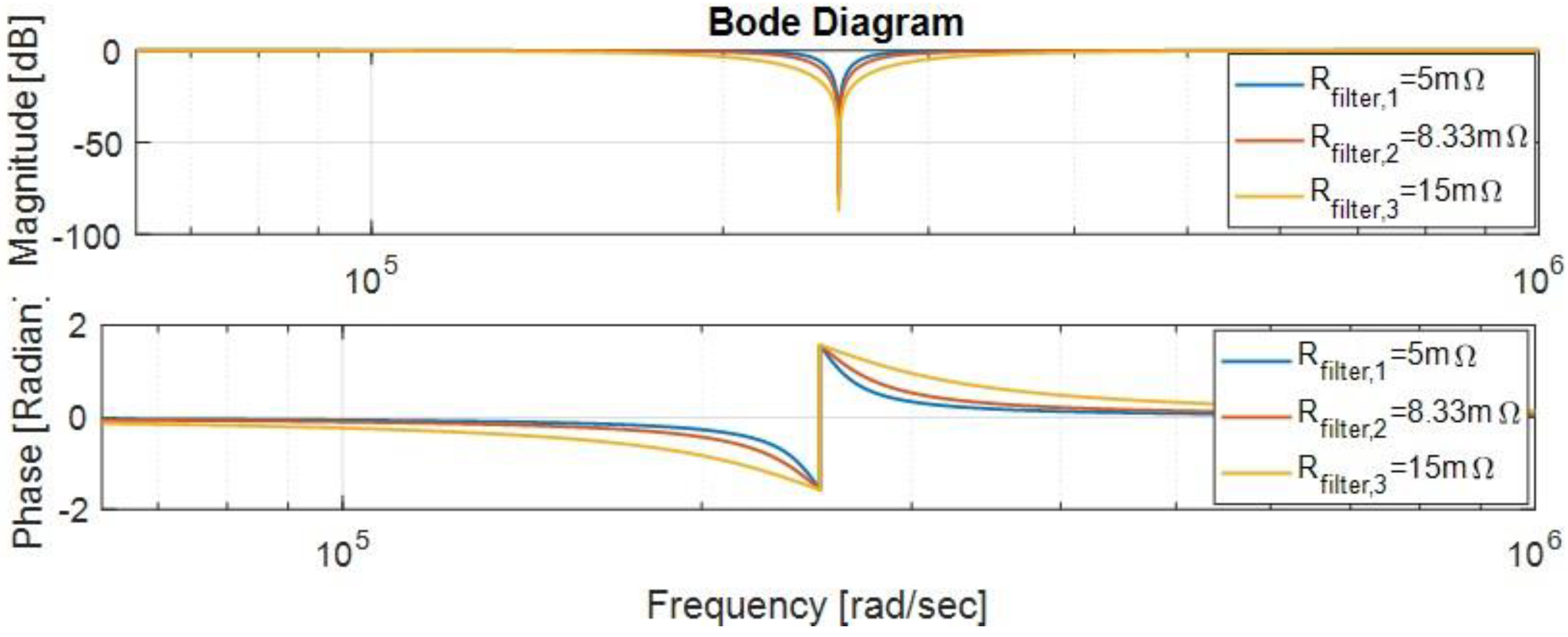
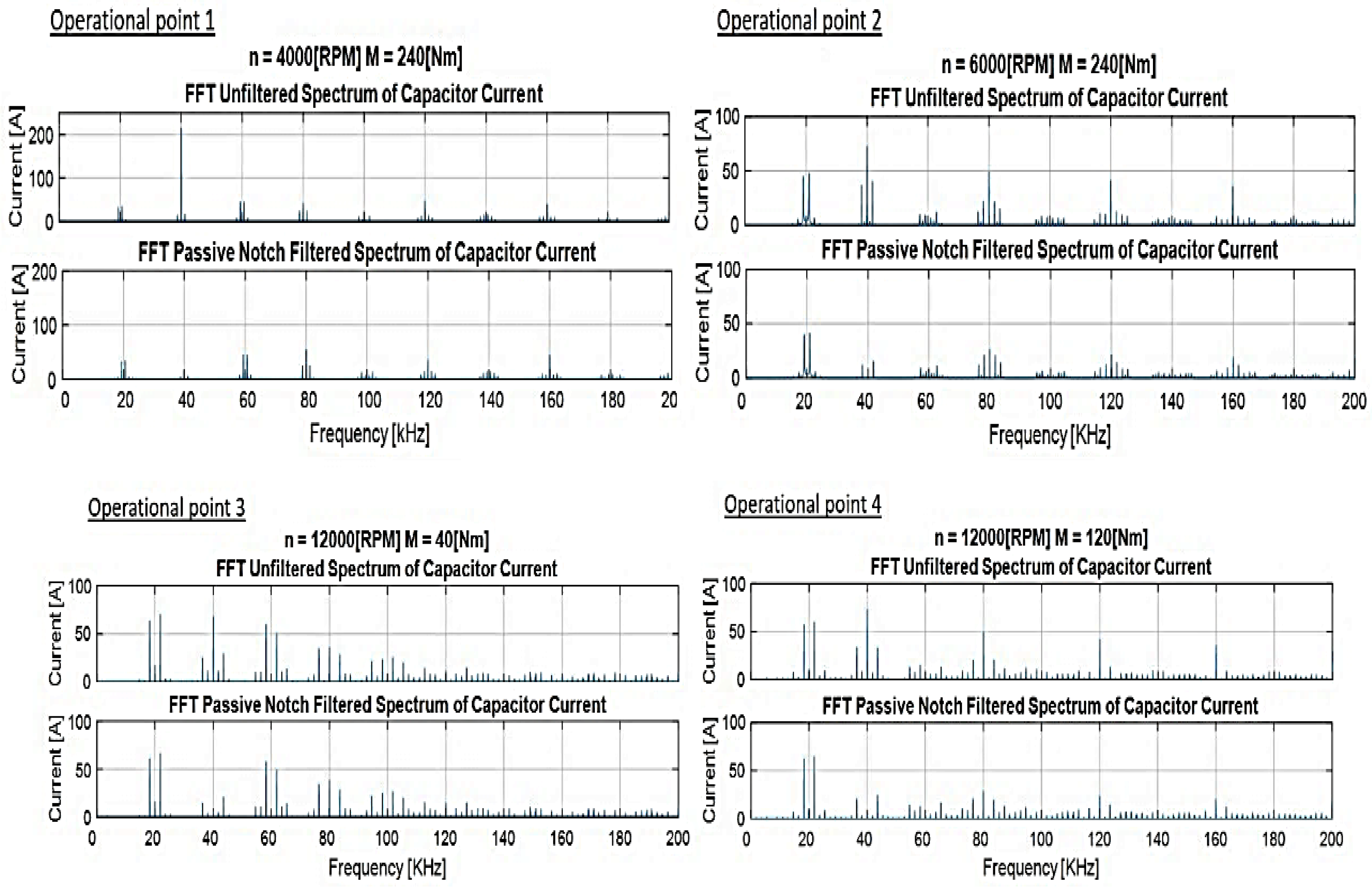
2.4.1. Passive Notch Filter
2.4.2. Change in Modulation
3. Results, Analysis, and Discussion
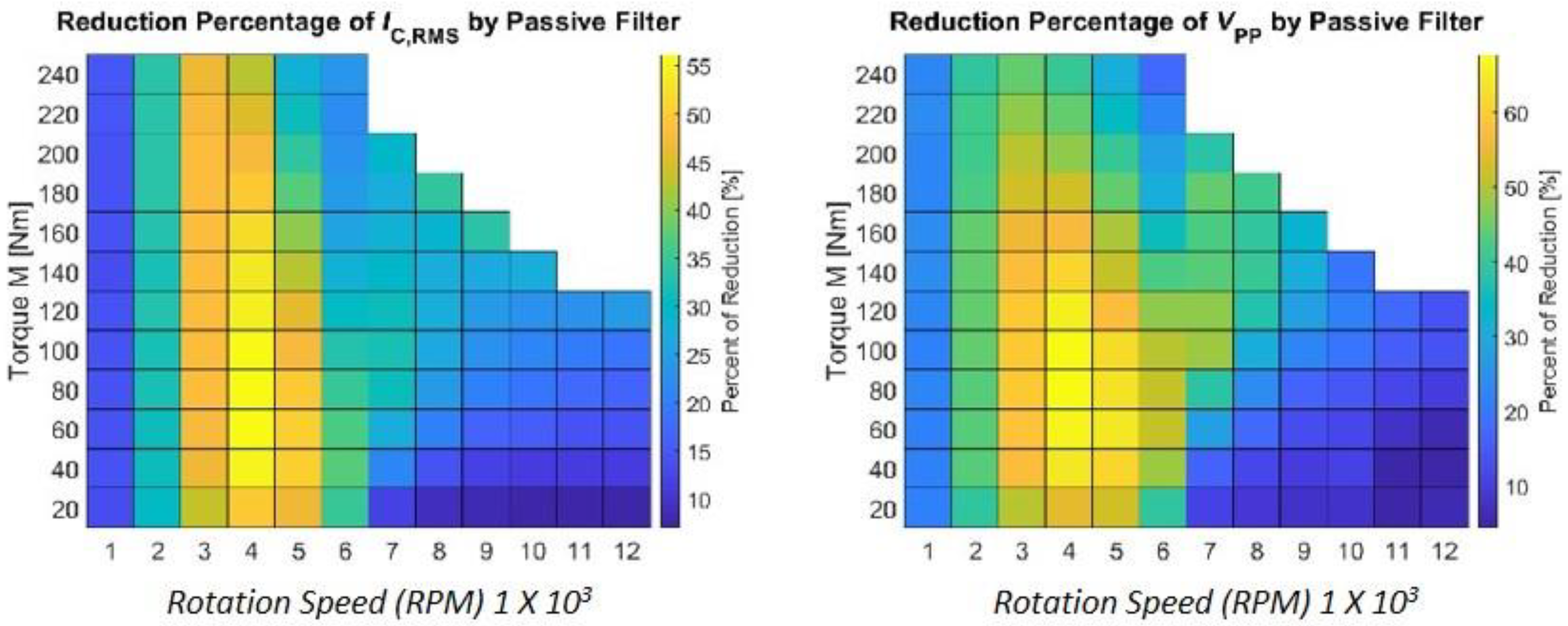
3.1. Passive Notch Filter
3.2. Change in Modulation
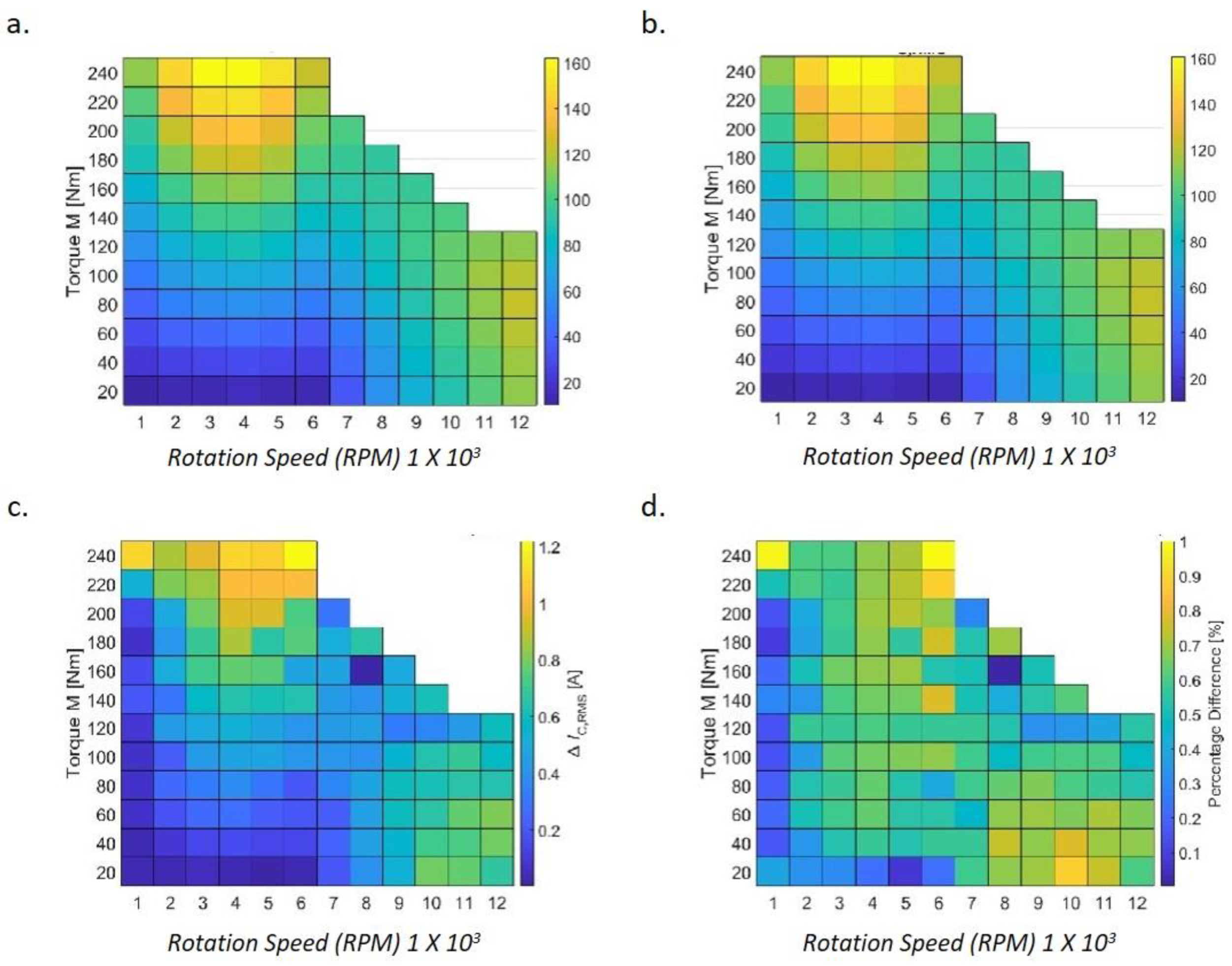
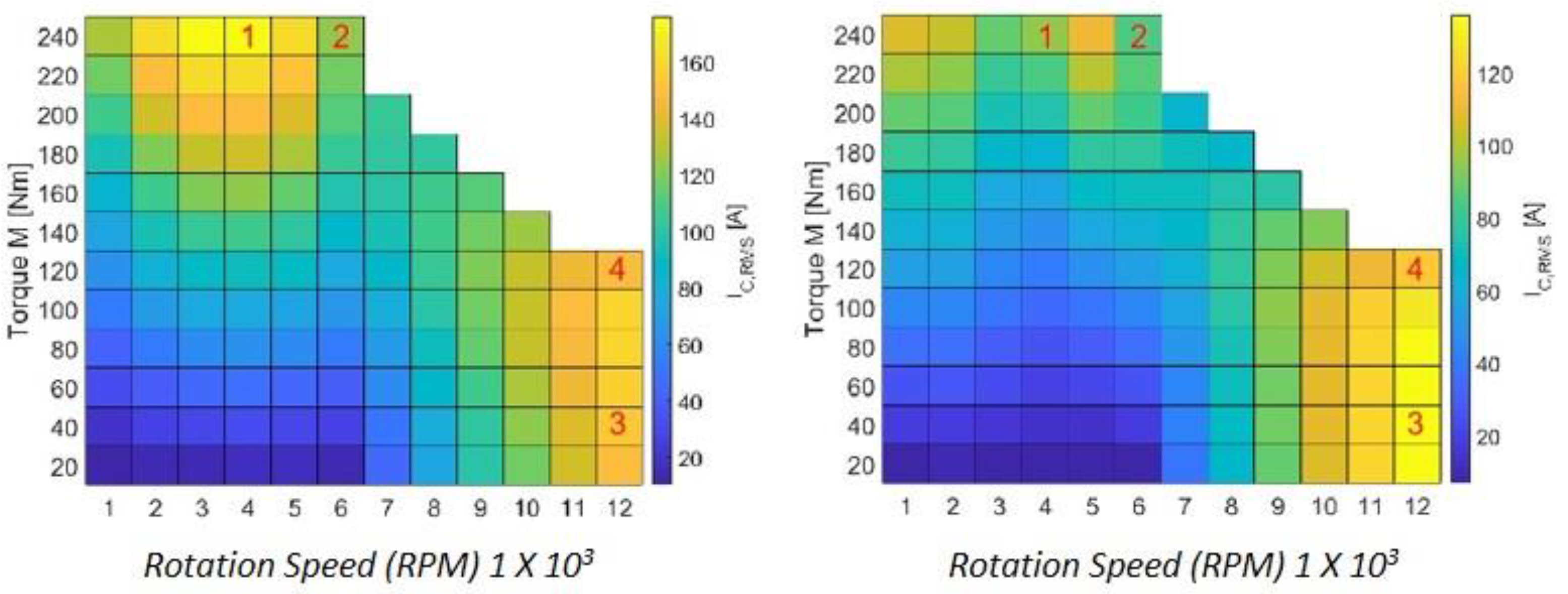
3.3. Optimization of DC-Link Capacitor
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Abbreviations and Notations
| FOC | Field-oriented control |
| DC | Direct Current |
| AC | Alternating Current |
| PMSM | Permanent magnetic synchronous motor |
| EV | Electric vehicle |
| RMS | Root mean square |
| PWM | Pulse Width Modulation |
| ESR | Equivalent series resistance |
| THD | Total harmonic distortion |
| SVPWM | Space vector pulse width modulation |
| DQ | Direct axis and quadrature axis |
| Battery internal voltage | |
| Battery internal resistance | |
| Battery internal inductance | |
| Power factor | |
| Pole pairs | |
| Nominal power | |
| Maximum torque | |
| Stator resistance | |
| Rated rotation speed | |
| Extended rotation speed | |
| Estimated motor and inverter efficiency | |
| Switching frequency | |
| The maximal modulation index of the three-phase inverter | |
| Maximum input phase current | |
| DC-link capacitor voltage | |
| Maximum phase voltage amplitude | |
| Quadrature current | |
| Flux linkage | |
| Stator inductance | |
| Root mean square of DC-link capacitor current | |
| Modulation index | |
| DC-link capacitor current | |
| Inverter output current | |
| Rotor angle | |
| Damping factor | |
| Resonance frequency | |
| Switching frequency | |
| Voltage on DC-link capacitor | |
| Flux linkage by permanent magnets | |
| Motor electric angular frequency | |
| Direct current/quadrature current | |
| Torque | |
| Stator inductance |
References
- Frumhoff, P. Global Warming Fact: More Than Half of All Industrial CO2 Pollution Has Been Emitted Since. 1988. Union Concerned Sci. 2014, 15. [Google Scholar]
- Leal-Arcas, R.; Morelli, A. The resilience of the Paris Agreement: Negotiating and implementing the climate regime. Geo. Envtl. L. Rev. 2018, 31, 1. [Google Scholar]
- Pendolovska, V.; Fernandez, R.; Mandl, N.; Gugele, B.; Ritter, M. Annual European Union Greenhouse Gas Inventory 1990–2011 and Inventory Report 2013; European Environment Agency: Luxembourg, 2013. [Google Scholar]
- Singh, K.V.; Bansal, H.O.; Singh, D. A comprehensive review on hybrid electric vehicles: Architectures and components. J. Mod. Transp. 2019, 27, 77–107. [Google Scholar] [CrossRef] [Green Version]
- Plötz, P.; Schneider, U.; Globisch, J.; Dütschke, E. Who will buy electric vehicles? Identifying early adopters in Germany. Transp. Res. Part A Policy Pract. 2014, 67, 96–109. [Google Scholar] [CrossRef]
- Tsakalidis, A.; Thiel, C. Electric Vehicles in Europe from 2010 to 2017: Is Full-Scale Commercialisation Beginning; Publications Office of the European Union: Luxembourg, 2018. [Google Scholar]
- Husain, I. Electric and Hybrid Vehicles: Design Fundamentals; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar]
- Ashfaq, M.; Butt, O.; Selvaraj, J.; Rahim, N. Assessment of electric vehicle charging infrastructure and its impact on the electric grid: A review. Int. J. Green Energy 2021, 18, 657–686. [Google Scholar] [CrossRef]
- Heydari-Doostabad, H.; Hosseini, S.H.; Ghazi, R.; O’Donnell, T. Pseudo dc-link EV home charger with a high semiconductor device utilization factor. IEEE Trans. Ind. Electron. 2021, 69, 2459–2469. [Google Scholar] [CrossRef]
- Sridharan, S.; Kimmel, J.; Kikuchi, J. DC-Link Capacitor Sizing Considerations for HEV/EV e-Drive Systems; 0148-7191; SAE Technical Paper; WCX 17:SAE World Congress Experience: Detroit, MI, USA, 2017. [Google Scholar]
- Qamar, H.; Qamar, H.; Wu, D.; Ayyanar, R. DC Link Capacitor Sizing for 240°—Clamped Space Vector PWM for EV Traction Inverters. In Proceedings of the 2021 IEEE Applied Power Electronics Conference and Exposition (APEC), Phoenix, AZ, USA, 14–17 June 2021; pp. 835–841. [Google Scholar]
- Vujacic, M.; Hammami, M.; Srndovic, M.; Grandi, G. Analysis of dc-link voltage switching ripple in three-phase PWM inverters. Energies 2018, 11, 471. [Google Scholar] [CrossRef] [Green Version]
- Mnati, M.J.; Abed, J.K.; Bozalakov, D.V.; Van den Bossche, A. Analytical and calculation DC-link capacitor of a three-phase grid-tied photovoltaic inverter. In Proceedings of the 2018 IEEE 12th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2018), Doha, Qatar, 10–12 April 2018; pp. 1–6. [Google Scholar]
- Wen, H.; Xiao, W.; Wen, X.; Armstrong, P. Analysis and evaluation of DC-link capacitors for high-power-density electric vehicle drive systems. IEEE Trans. Veh. Technol. 2012, 61, 2950–2964. [Google Scholar]
- Welchko, B.A. Analytical calculation of the RMS current stress on the DC link capacitor for a VSI employing reduced common mode voltage PWM. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–8. [Google Scholar]
- Nazlee, A.M.; Hamid, N.H.; Hussin, F.A.; Ali, N.B.Z. Space Vector PWM for PMSM simulation using Matlab Simulink. In Proceedings of the 2010 IEEE Asia Pacific Conference on Circuits and Systems, Kuala Lumpur, Malaysia, 6–9 December 2010; pp. 1127–1130. [Google Scholar]
- Saidi, H.; Taleb, R.; Mansour, N.; Midoun, A. Three phase inverter using SVPWM method for solar electric vehicle. In Proceedings of the IREC 2015 The Sixth International Renewable Energy Congress, Sousse, Tunisia, 24–26 March 2015; pp. 1–5. [Google Scholar]
- Jose, J.; Goyal, G.; Aware, M. Improved inverter utilisation using third harmonic injection. In Proceedings of the 2010 Joint International Conference on Power Electronics, Drives and Energy Systems & 2010 Power India, New Delhi, India, 20–23 December 2010; pp. 1–6. [Google Scholar]
- Shi, Y. Field Oriented Control of Permanent Magnet Synchronous Motor with Third-Harmonic Injection Pulse width Modulation to Reduce Quadrotors’ Speed Ripples; New Jersey Institute of Technology: Newark, NJ, USA, 2017. [Google Scholar]
- Yesilbag, E.; Ergene, L. Field oriented control of permanent magnet synchronous motors used in washers. In Proceedings of the 2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014; pp. 1259–1264. [Google Scholar]
- Nag, S.S.; Mishra, S.; Joshi, A. A passive filter building block for input or output current ripple cancellation in a power converter. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 4, 564–575. [Google Scholar] [CrossRef]
- Meddins, R. Introduction to Digital Signal Processing; Newnes: Oxford, UK, 2000. [Google Scholar]
- Karanayil, B.; Agelidis, V.G.; Pou, J. Evaluation of DC-link decoupling using electrolytic or polypropylene film capacitors in three-phase grid-connected photovoltaic inverters. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 6980–6986. [Google Scholar]
- Emadi, A. Automotive Power Electronics and Motor Drives; Illinois Institute of Technology Chicago: Chicago, IL, USA, 2005. [Google Scholar]
- Yu, L.; Wang, C.; Shi, H.; Xin, R.; Wang, L. Simulation of PMSM field-oriented control based on SVPWM. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 7407–7411. [Google Scholar]
- Su, G.-J.; Tang, L. A segmented traction drive system with a small dc bus capacitor. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 2847–2853. [Google Scholar]
- Lyu, X.; Zhou, H.; Curuvija, B.; Cao, D. DC-link RMS current reduction by increasing paralleled 3-phase inverter module number for segmented traction drive. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 906–911. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Vectors | Switching Vectors | Line-to-Neutral Voltage | Line-to-Line Voltage | ||||||
|---|---|---|---|---|---|---|---|---|---|
| V0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| V1 | 1 | 0 | 0 | 1 | 0 | −1 | |||
| V2 | 1 | 1 | 0 | 0 | 1 | −1 | |||
| V3 | 0 | 1 | 0 | −1 | 1 | 0 | |||
| V4 | 0 | 1 | 1 | −1 | 0 | 1 | |||
| V5 | 0 | 0 | 1 | 0 | −1 | 1 | |||
| V6 | 1 | 0 | 1 | 1 | −1 | 0 | |||
| V7 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| No. | Parameter | Notation | Value |
|---|---|---|---|
| DC-link capacitor constraints | |||
| 1 | Battery internal voltage | 560–850 V | |
| 2 | Battery internal resistance | 150 mΩ | |
| 3 | Battery internal inductance | 5 μH | |
| Motor constraints | |||
| 1 | Power factor | 0.90 | |
| 2 | Pole pairs | 3 | |
| 3 | Nominal power | 150 Kw | |
| 4 | Maximum torque | 240 Nm | |
| 5 | Stator resistance | 20 mΩ | |
| 6 | Rated rotation speed | 6000 rpm | |
| 7 | Extended rotation speed | 12,000 rpm | |
| 8 | Estimated motor and inverter efficiency | 0.96 | |
| 3-Phase inverter constraints | |||
| 1 | Switching frequency | 20 KHz | |
| 2 | The maximal modulation index of the three-phase inverter | 1.15 | |
| No. | Parameter | Notation | Value |
|---|---|---|---|
| 1 | Max input phase current | 303.73 A | |
| 2 | DC-link capacitor voltage | 514.45 V | |
| 3 | Max phase voltage amplitude | 295.80 V | |
| 4 | Quadrature current | 386.87 A | |
| 5 | Flux linkage | 0.1371 Vs | |
| 6 | Stator inductance | 176.81 μH |
| Parameters | Values |
|---|---|
| 150 μF | |
| 5 μH | |
| 150 mΩ | |
| 560 V |
| Operation Point No. | Torque M (Nm) | Rotation Speed n (RPM) | Unfiltered DC-Link Capacitor | Passive Filtered DC-link Capacitor | ||
|---|---|---|---|---|---|---|
| 1 | 240 | 4000 | 176 | 18.9 | 94.9 | 9.48 |
| 2 | 240 | 6000 | 123.8 | 20.1 | 83.7 | 14.5 |
| 3 | 40 | 12,000 | 153.3 | 29 | 135.8 | 26.6 |
| 4 | 120 | 12,000 | 148.6 | 26.4 | 118.4 | 23.7 |
| Operation Point No. | Torque M (Nm) | Rotation Speed n (RPM) | Triangular Carrier with 90° Ph. Shift | Saw-Tooth Carrier with 180° Ph. Shift | ||
|---|---|---|---|---|---|---|
| 1 | 240 | 4000 | 71.8 | 6.43 | 65.8 | 8.87 |
| 2 | 240 | 6000 | 80.3 | 11.9 | 70.9 | 9.53 |
| 3 | 40 | 12,000 | 105.5 | 18.3 | 73.6 | 13.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Butt, O.M.; Butt, T.M.; Ashfaq, M.H.; Talha, M.; Raihan, S.R.S.; Hussain, M.M. Simulative Study to Reduce DC-Link Capacitor of Drive Train for Electric Vehicles. Energies 2022, 15, 4499. https://doi.org/10.3390/en15124499
Butt OM, Butt TM, Ashfaq MH, Talha M, Raihan SRS, Hussain MM. Simulative Study to Reduce DC-Link Capacitor of Drive Train for Electric Vehicles. Energies. 2022; 15(12):4499. https://doi.org/10.3390/en15124499
Chicago/Turabian StyleButt, Osama Majeed, Tallal Majeed Butt, Muhammad Husnain Ashfaq, Muhammad Talha, Siti Rohani Sheikh Raihan, and Muhammad Majid Hussain. 2022. "Simulative Study to Reduce DC-Link Capacitor of Drive Train for Electric Vehicles" Energies 15, no. 12: 4499. https://doi.org/10.3390/en15124499
APA StyleButt, O. M., Butt, T. M., Ashfaq, M. H., Talha, M., Raihan, S. R. S., & Hussain, M. M. (2022). Simulative Study to Reduce DC-Link Capacitor of Drive Train for Electric Vehicles. Energies, 15(12), 4499. https://doi.org/10.3390/en15124499