
Research on LADRC of Grid-Connected Inverter Based on LCCL

Abstract
:1. Introduction
- (1)
- This research offers an ADRC current control approach for grid-connected inverters based on LCCL to address the aforementioned issues. The combination of LCCL and passive dampening can efficiently suppress grid side current oscillation.
- (2)
- The basic principle of first-order LADRC is investigated, and LADRC control is applied to the control strategy of an LCCL grid-connected inverter.
- (3)
- By comparing PI control and LADRC control, a simulation and experimental platform is constructed to control the LCCL grid-connected inverter. The effectiveness of LADRC’s system control is verified.
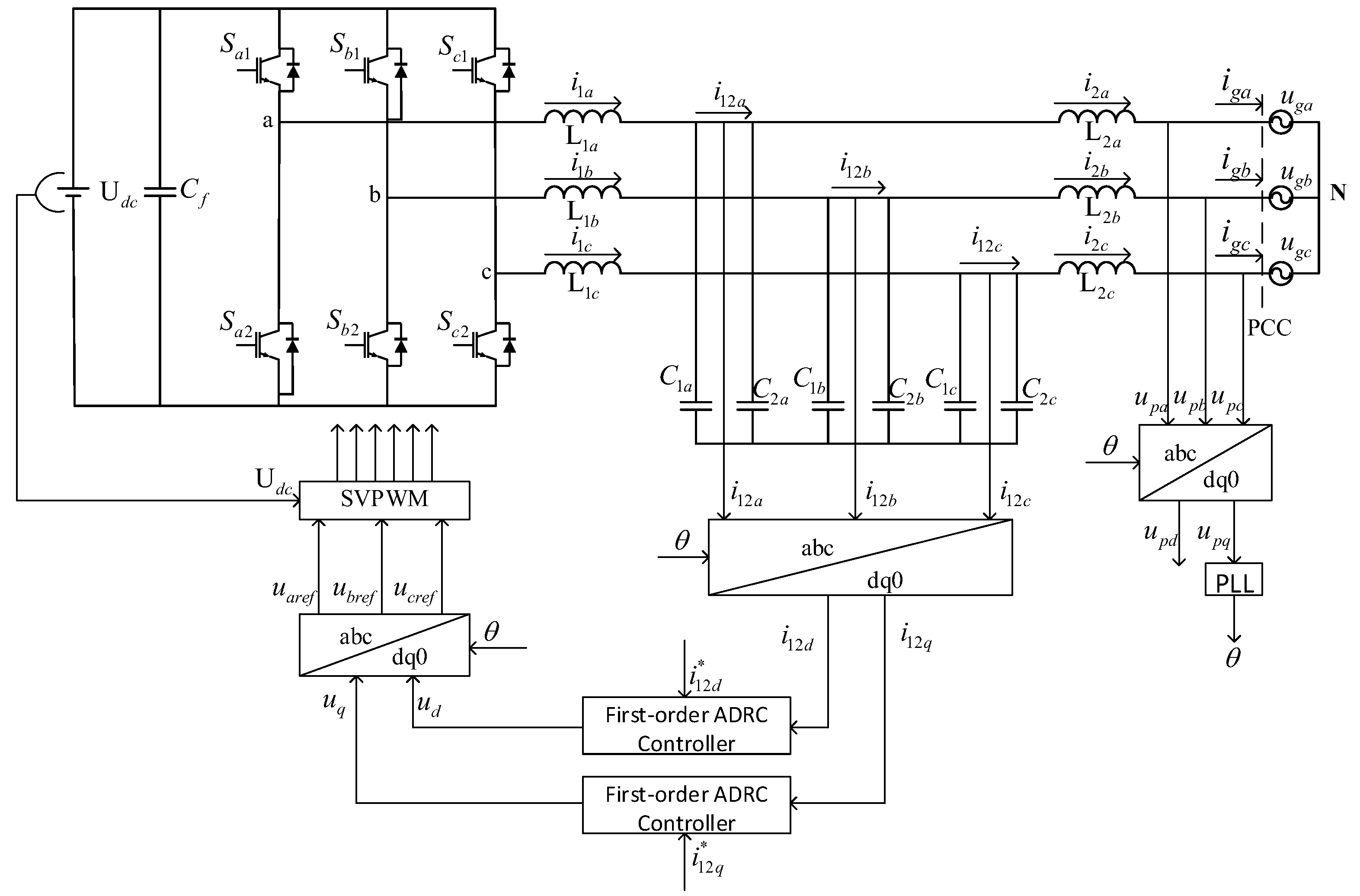
2. LCCL Grid-Connected Inverter Topology Structure
- (1)
- The inductance of the filter is linear, and saturation is not considered, and active power loss is ignored;
- (2)
- The DC side voltage is a constant value;
- (3)
- All IGBTs in the main circuit are ideal devices, that is, switching loss and switching time are not considered;
- (4)
- The three-phase grid voltage is symmetrical, that is, ;
- (5)
- The working state of the three-phase is symmetrical, , , , .
3. Current Control Based on LADRC
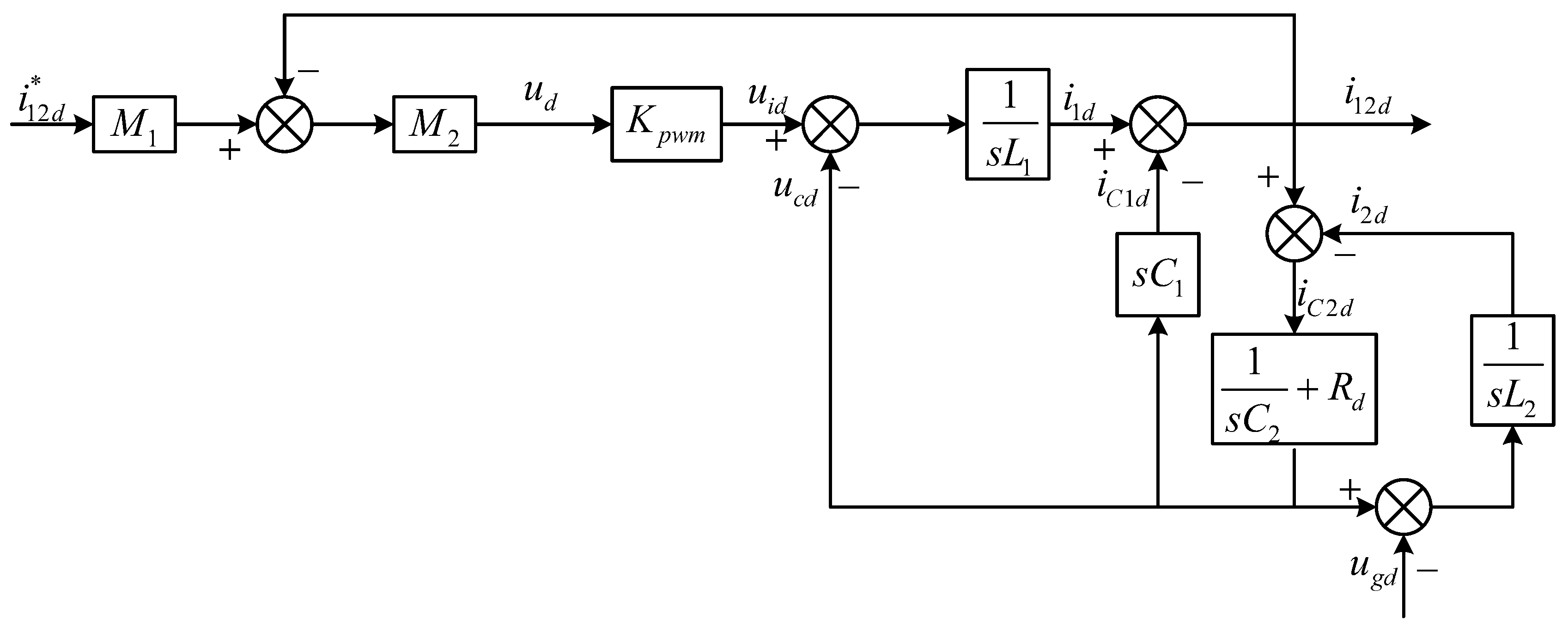
3.1. Reconstruction of the State Equation
3.2. Design of LESO
3.3. Design of LSEF
- (1)
- What you need to know about the inverter is ;
- (2)
- Construct a LESO, providing estimates of the control current and generalized perturbation, and then construct the control law as shown in Equation (17);
- (3)
- The observer bandwidth can be obtained from Equation (14), . The bandwidth of the controller is usually obtained by an empirical formula .
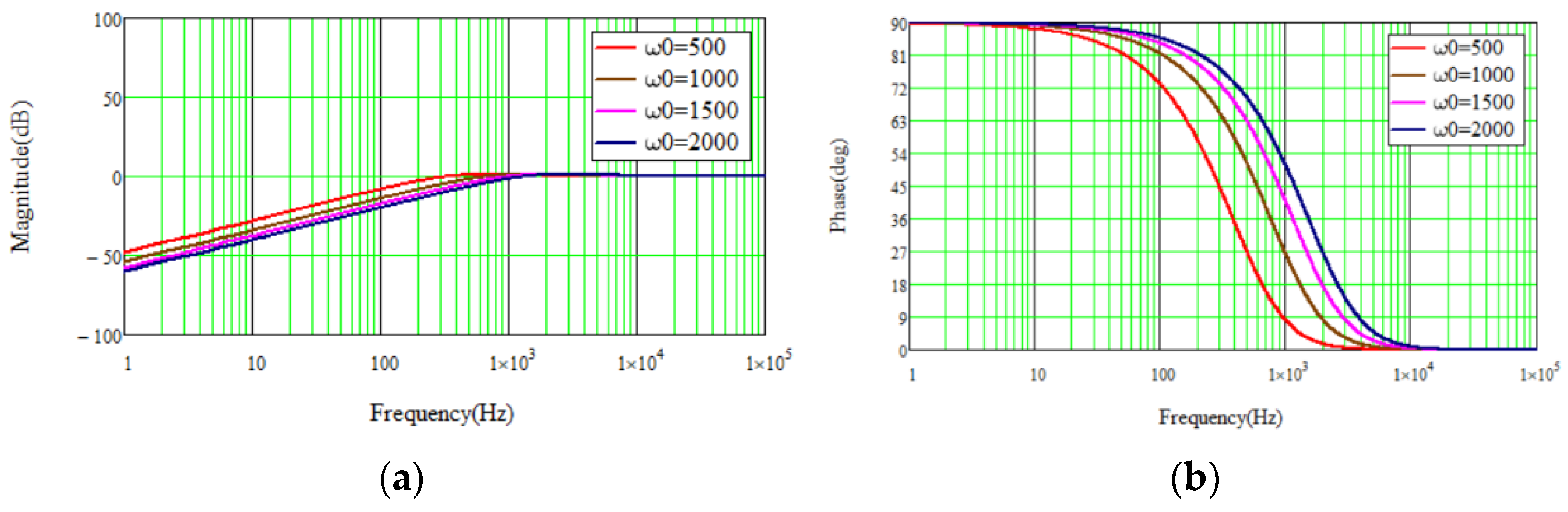
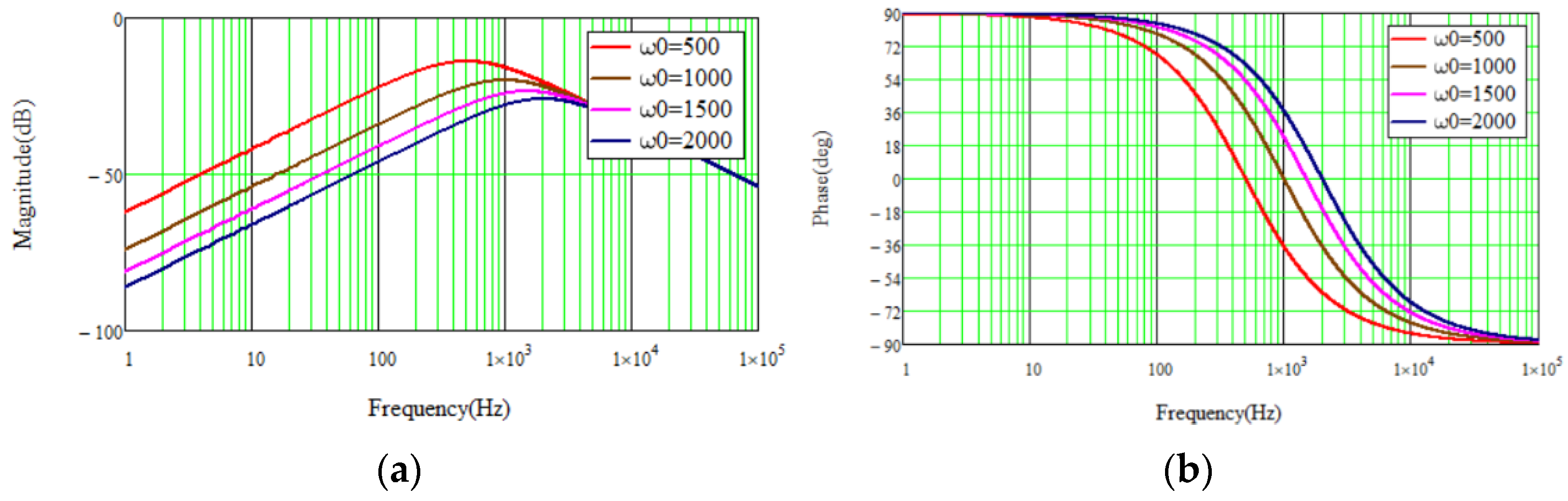
4. Analysis of System Performance
5. System Simulation and Experiment
5.1. System Simulation
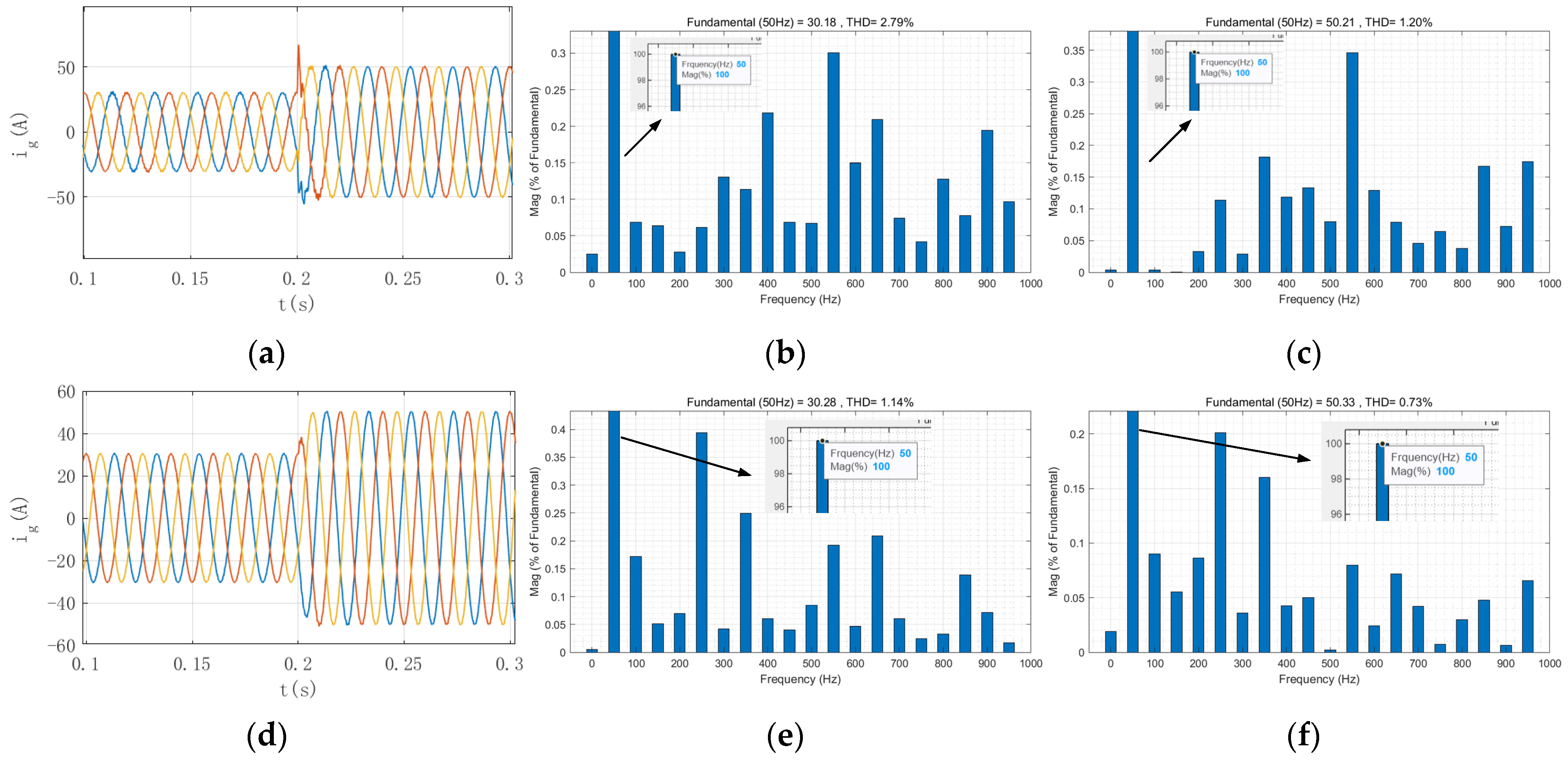
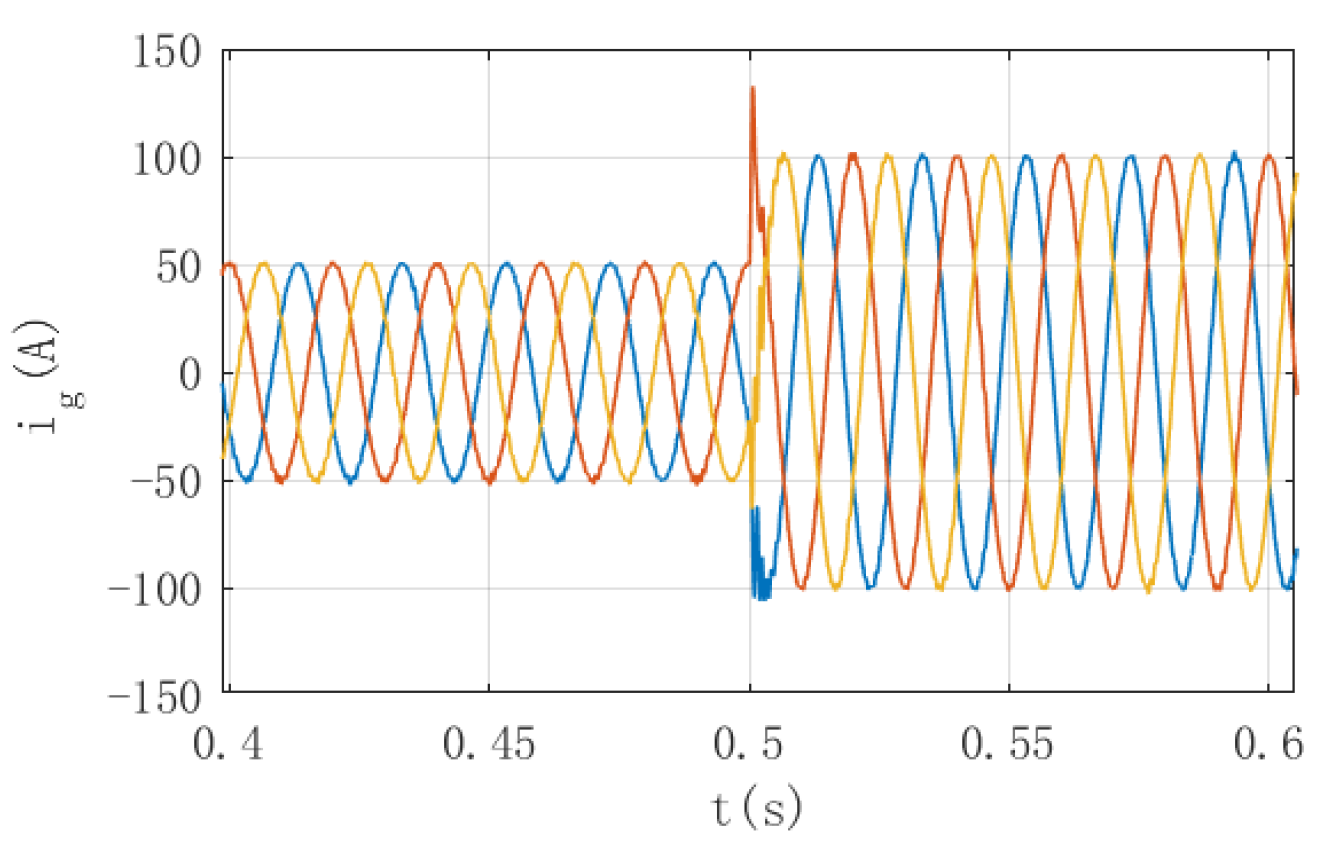
5.1.1. Power Mutation
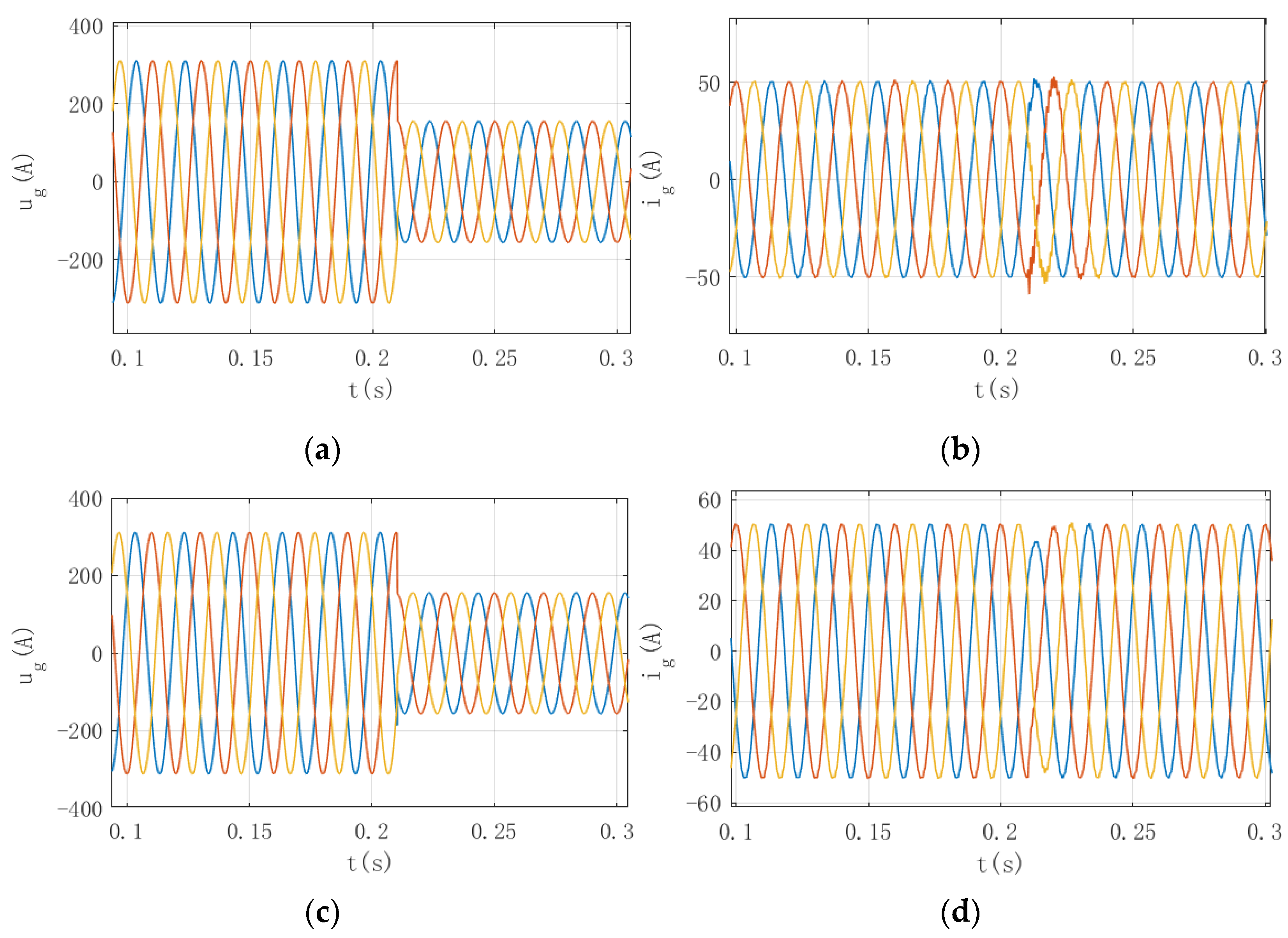
5.1.2. Grid Voltage Drop
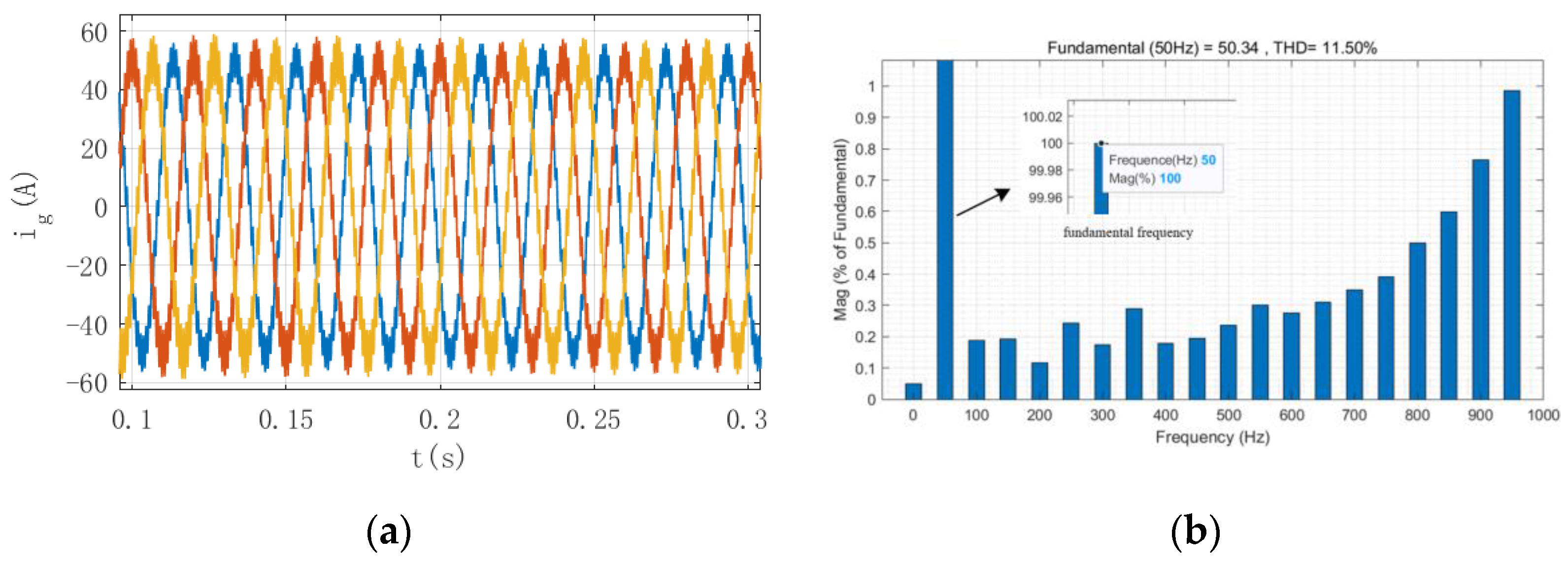
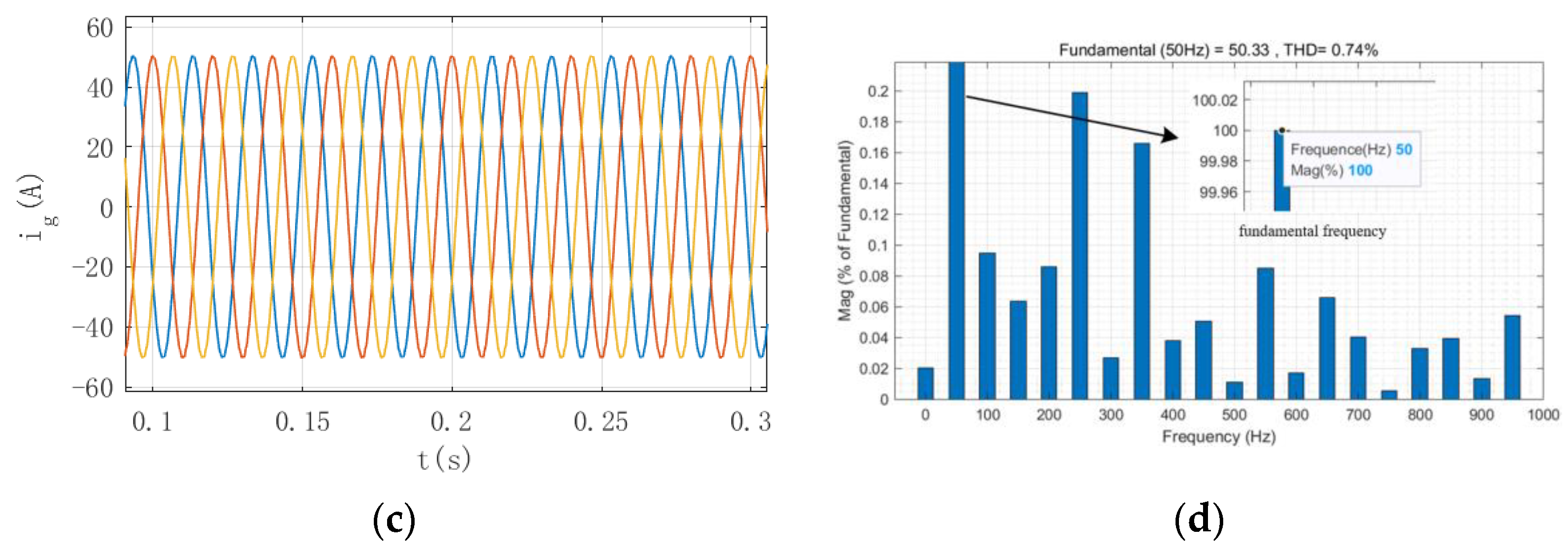
5.1.3. Passive Damping
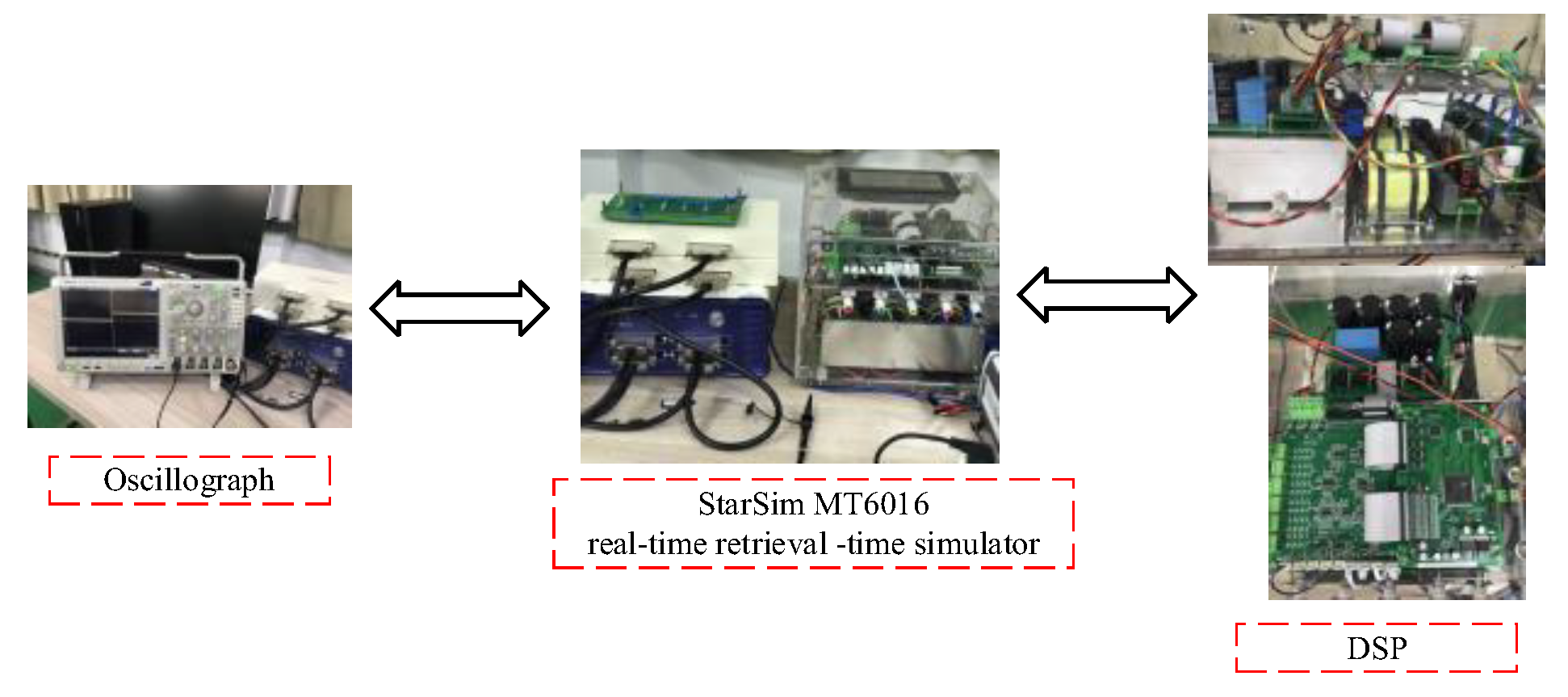
5.2. Experiment Verification
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef] [Green Version]
- Ruan, X. Control Technology of LCL Grid-Connected Inverter; Science Press: Beijing, China, 2015; pp. 4–10. [Google Scholar]
- Guan, Y.; Wang, Y.; Xie, Y.; Liang, Y.; Lin, A.; Wang, X. The dual-current control strategy of grid-connected inverter with LCL filter. IEEE Trans. Power Electron. 2019, 34, 5940–5952. [Google Scholar] [CrossRef]
- Gao, J.; Tu, C.; Xiao, F.; Guo, Q.; Zou, K.; Jiang, F. Stability difference analysis of LCL filter grid-connected inverter in different domains based on SISO impedance model under weak grid. J. Electr. Eng. China 2021, 34, 5940–5952. [Google Scholar]
- Liserre, M.; Blaabejerg, F.; Hansen, S. Design and control of an LCL-filter-based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, C.; Chen, P. Research on control technology of microgrid LCL grid-connected inverter. Sci. Technol. Innov. 2021, 1, 156–158. [Google Scholar]
- Yin, W.; Ma, Y. Research on Three-Phase PV Grid-Connected Inverter Based on LCL Filter. In Proceedings of the IEEE Industrial Electronics and Applications(ICIEA), Melbourne, Australia, 19–21 June 2013; pp. 1279–1283. [Google Scholar]
- Li, W.; Ruan, X.; Pan, D.; Wang, X. Full-feedforward schemes of grid volt ages for a three-phase LCL-type grid-connected inverter. IEEE Trans. Ind. Electron. 2013, 60, 2237–2250. [Google Scholar] [CrossRef]
- Vieira, R.P.; Martins, L.T.; Massing, J.R.; Stefanello, M. Sliding mode controller in a multi-loop framework for a grid-connected VSI with LCL filter. IEEE Trans. Ind. Electron. 2018, 65, 4714–4723. [Google Scholar] [CrossRef]
- Shen, G.; Xu, D. LCL filter grid-connected inverter split capacitor current control. Chin. J. Electr. Eng. 2008, 28, 36–41. [Google Scholar]
- Wang, H.; Wang, H.; Zhang, J.; Cai, X. Split capacitor passive damping control for LCL grid-connected inverter. Power Syst. Technol. 2014, 38, 895–902. [Google Scholar]
- Han, J. Active Disturbance Rejection Control Technology: Control Technology for Estimating Compensation Uncertainty; National Defense Industry Press: Beijing, China, 2008; pp. 221–237. [Google Scholar]
- Li, J.; Qi, X.; Wan, H.; Xia, Y. Active disturbance rejection control: Summary and prospect of research results. Control. Theory Appl. 2017, 34, 281–295. [Google Scholar]
- Gao, Z. Scaling and Bandwidth-Parameterization Based Controller Tuning. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Wang, G.; Liu, R.; Zhao, N.; Ding, D.; Xu, D. Enhanced linear ADRC strategy for HF pulse voltage signal injection-based sensorless IPMSM drives. IEEE Trans. Power Electron. 2019, 34, 514–525. [Google Scholar] [CrossRef]
- Xue, W.; Madonski, R.; Lakomy, K.; Gao, Z.; Huang, Y. Add-on module of active disturbance rejection for set-point tracking of motion control systems. IEEE Trans.Ind.Appl. 2017, 53, 4028–4040. [Google Scholar] [CrossRef]
- Chen, Z.; Liao, J.; Liu, G. Active disturbance rejection control algorithm and experimental study of new electro-hydraulic steering gear. China Ship Res. 2022, 17, 166–175. [Google Scholar]
- Rui, H.; Cao, W.; Wang, T. Research on path tracking control of PV cleaning robot based on improved ADRC. Mech. Des. 2021, 38 (Suppl. S2), 79–83. [Google Scholar]
- Ma, Y.; Zhao, J.; Zhou, X.; Tian, C. Linear active disturbance rejection control and stability analysis of parallel hybrid active power filter. Power Grid Technol. 2012, 36, 211–216. [Google Scholar]
- Benrabah, A.; Xu, D.; Wang, X.; Blaabjerg, F. Robust Active Damping Control of LCL fifiltered Grid Connected Converter Based Active Disturbance Rejection Control. In Proceedings of the IEEE Conference on Power Electronics and Motion Control, Varna, Bulgaria, 22–26 May 2016; pp. 2661–2666. [Google Scholar]
- Ma, M.; Liao, P.; Cai, Y.; Lei, E.; He, Y. ADR Control Strategy of LCL Grid-connected Inverter. High Volt. Technol. 2021, 47, 2223–2231. [Google Scholar]
- Yang, L.; Zeng, J.; Huang, Z. Application of linear active disturbance rejection technology in LCL inverter grid-connected current control and active damping. Power Grid Technol. 2019, 43, 1378–1386. [Google Scholar]
- Wang, B.; Xu, Y.; Shen, Z.; Zou, J.; Li, C.; Liu, H. Current control of grid-connected inverter with LCL fifilter based on extended-state observer estimations using single sensor and achieving improved robust observation dynamics. IEEE Trans. Ind. Electron. 2017, 64, 5428–5439. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| 700 | |
| 220 | |
| 10 | |
| 2.5 | |
| 8 | |
| 0.9 | |
| 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, G.; Chen, G.; Dong, Y.; Li, G.; Zhang, W. Research on LADRC of Grid-Connected Inverter Based on LCCL. Energies 2022, 15, 4686. https://doi.org/10.3390/en15134686
He G, Chen G, Dong Y, Li G, Zhang W. Research on LADRC of Grid-Connected Inverter Based on LCCL. Energies. 2022; 15(13):4686. https://doi.org/10.3390/en15134686
Chicago/Turabian StyleHe, Guofeng, Guanxu Chen, Yanfei Dong, Guojiao Li, and Wenjie Zhang. 2022. "Research on LADRC of Grid-Connected Inverter Based on LCCL" Energies 15, no. 13: 4686. https://doi.org/10.3390/en15134686