
A Comparative Study of Robust MPC and Stochastic MPC of Wind Power Generation System


Abstract
:1. Introduction
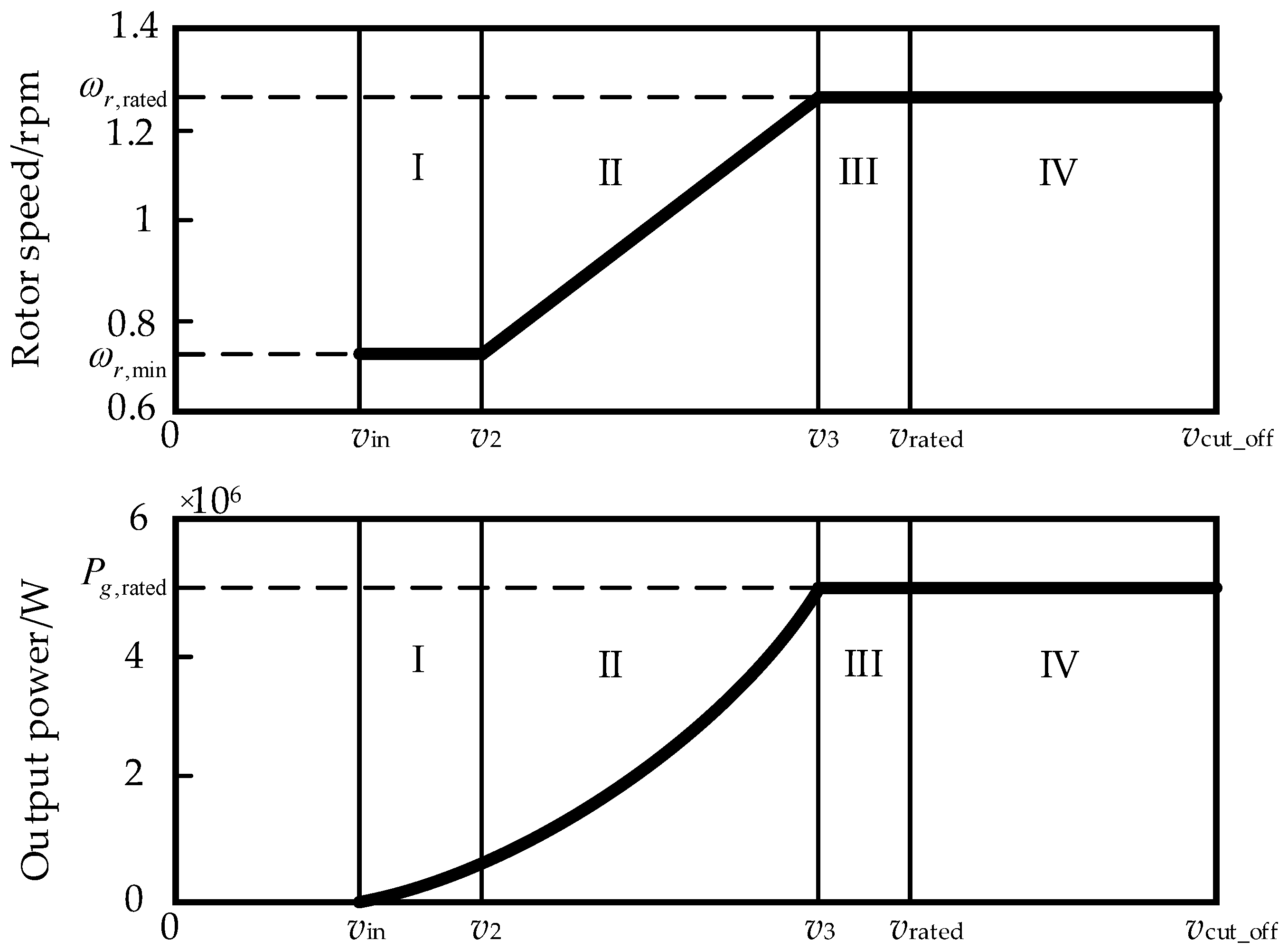
2. Wind Power Generation System Description
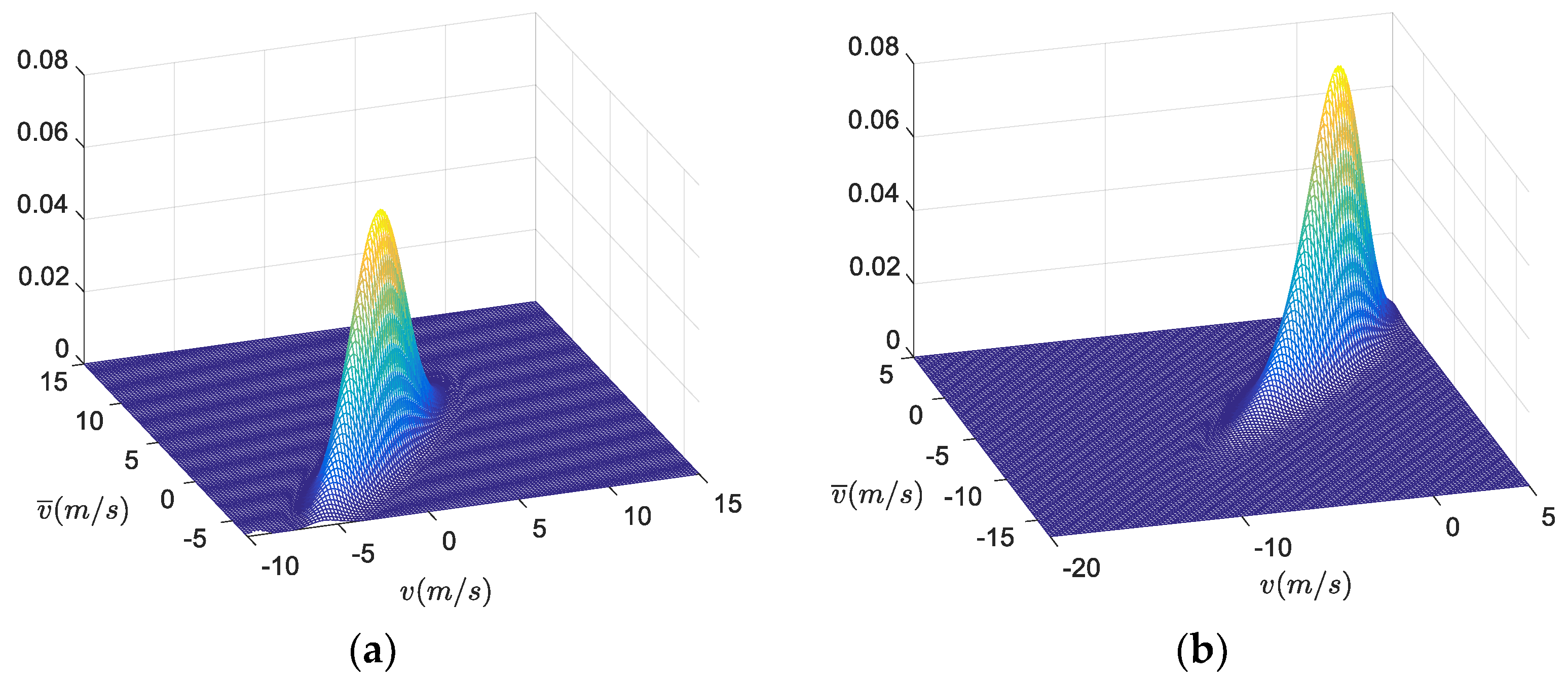
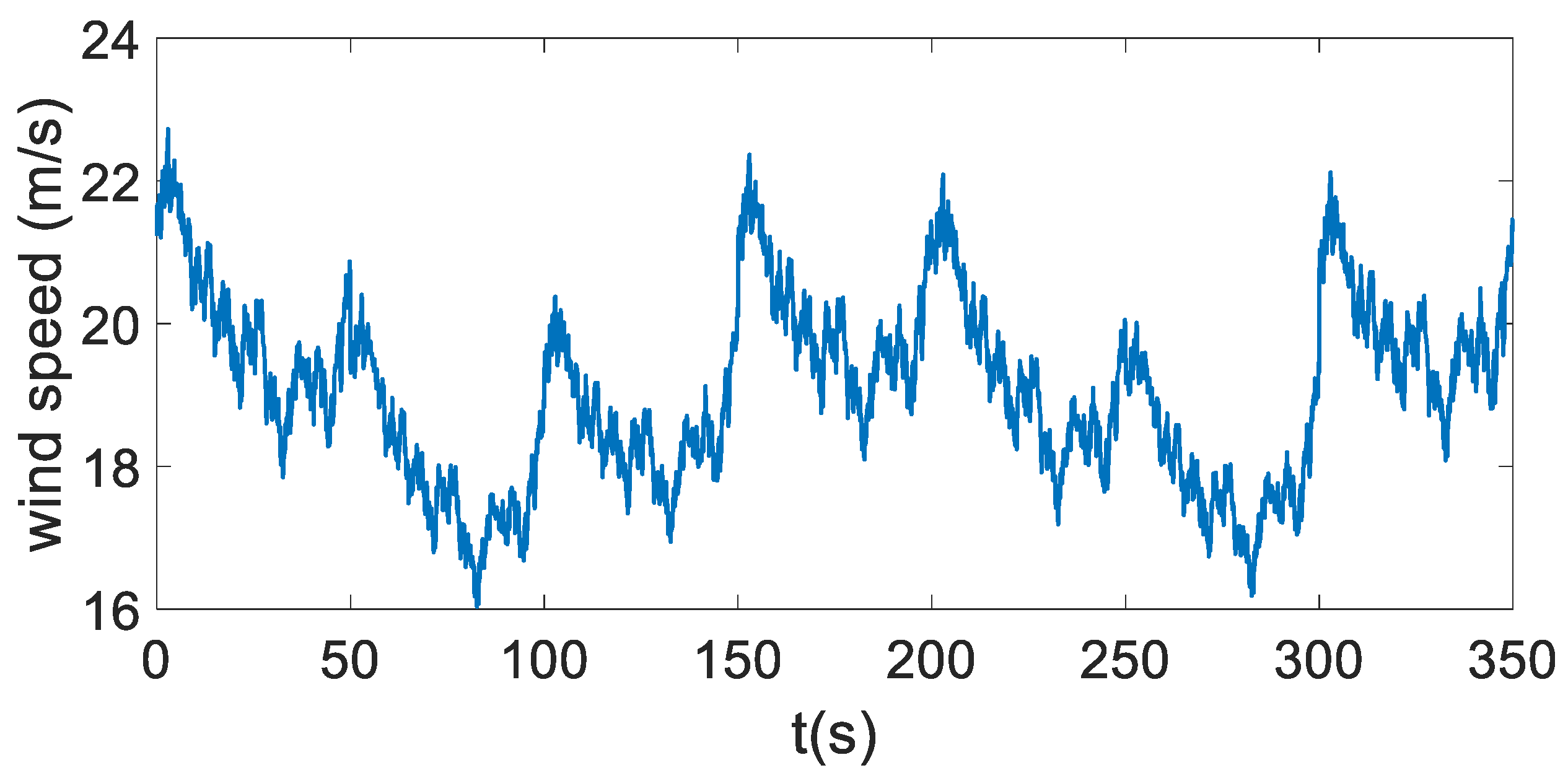
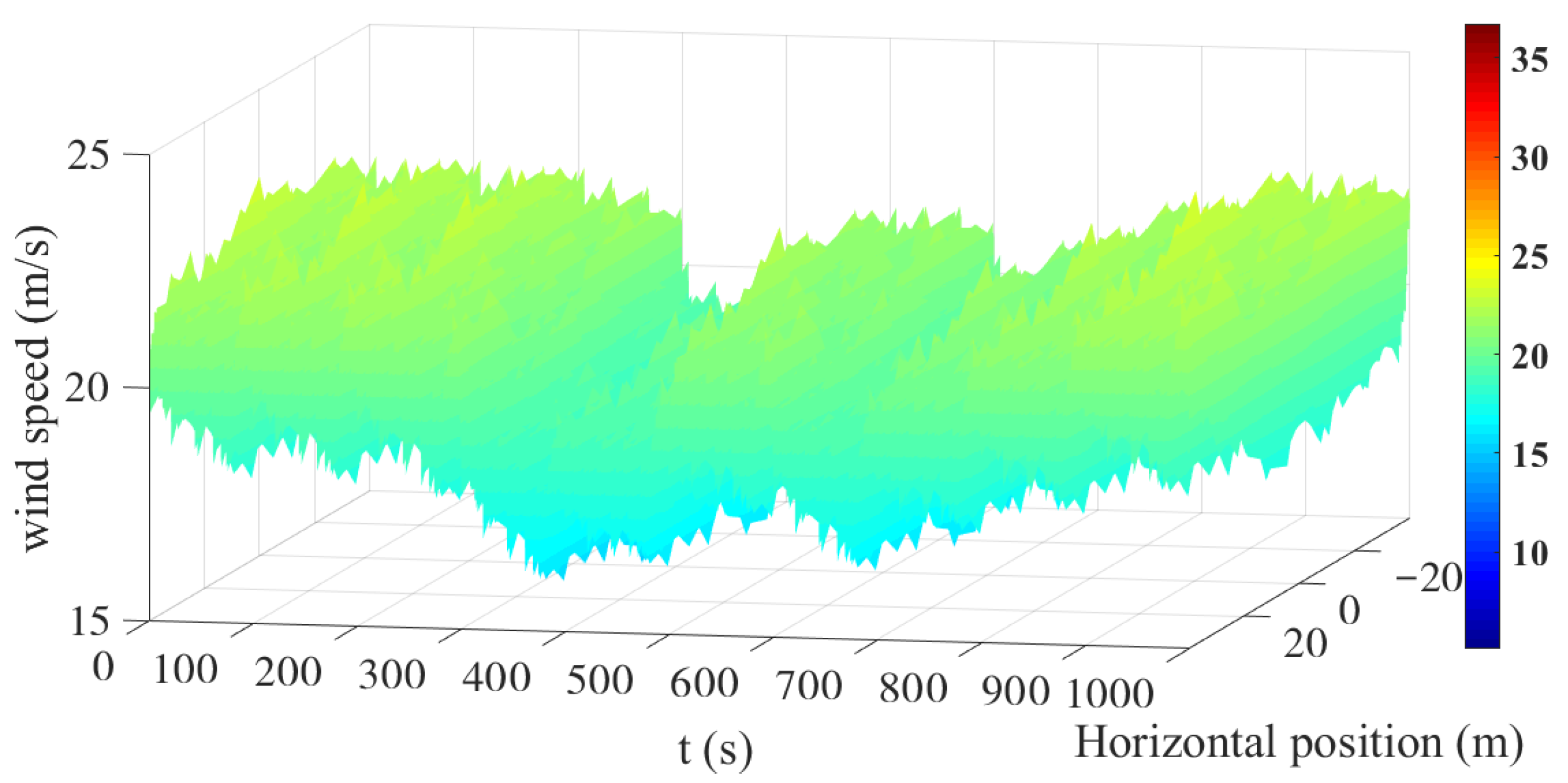
2.1. Wind Speed Model
2.2. WPGS Model
3. Model Predictive Control Strategies
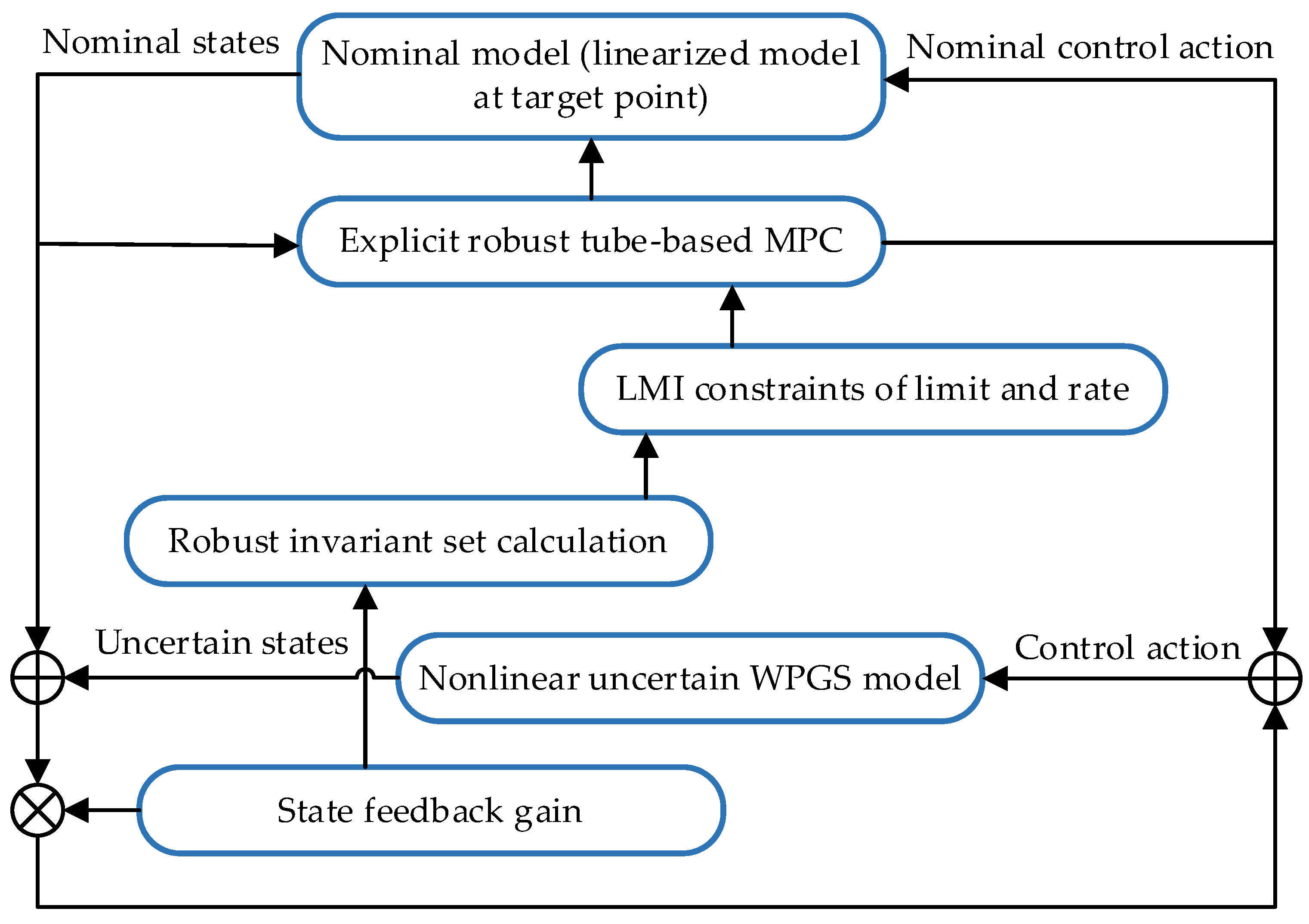
3.1. Robust MPC
- The linearized model (23) is calculated at the target point as in (23) under the measurement wind speed.
- The additive uncertainty is calculated using the Lipschitz condition.
- The robust invariant set is calculated utilizing the general robust tube method based on a predefined state feedback gain and boundary parameter in (7).
- The constraints (16)–(20) are transformed into the LMI forms on the basis of the robust invariant set.
- The optimal control sequence is calculated by solving an explicit tube-based robust MPC under the current state.
- Only the first two elements of the optimal control sequence are applied to the nominal model.
- The state error between the nominal model and the nonlinear uncertain system is calculated.
- The total control signal is calculated and then applied to the WPGS.
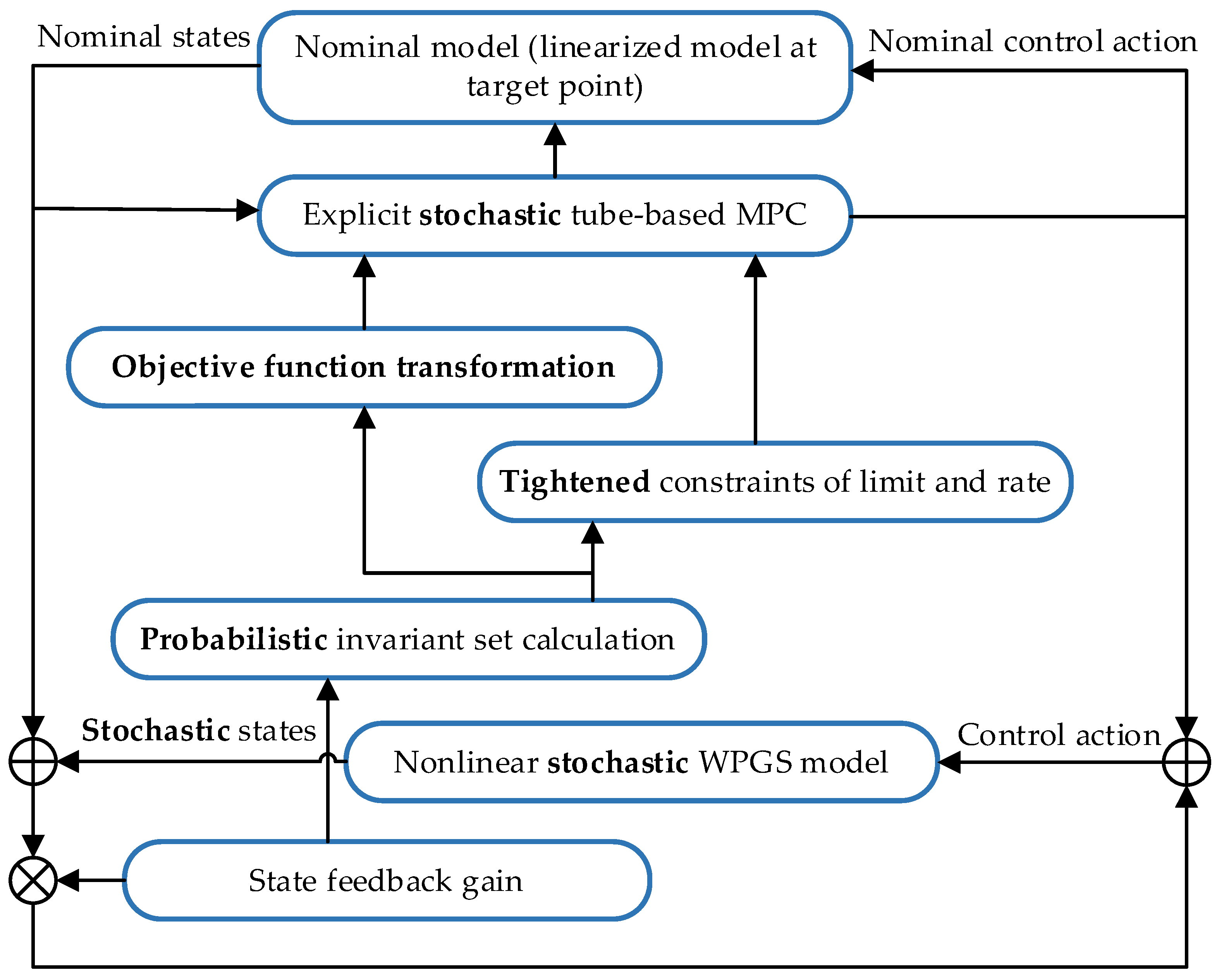
3.2. Stochastic MPC
- The probabilistic invariant set is calculated by utilizing the boundary parameter where .
- The expectation of objective function (21) is transformed into a deterministic one for facilitating the online solving of the stochastic optimization problem (31)).
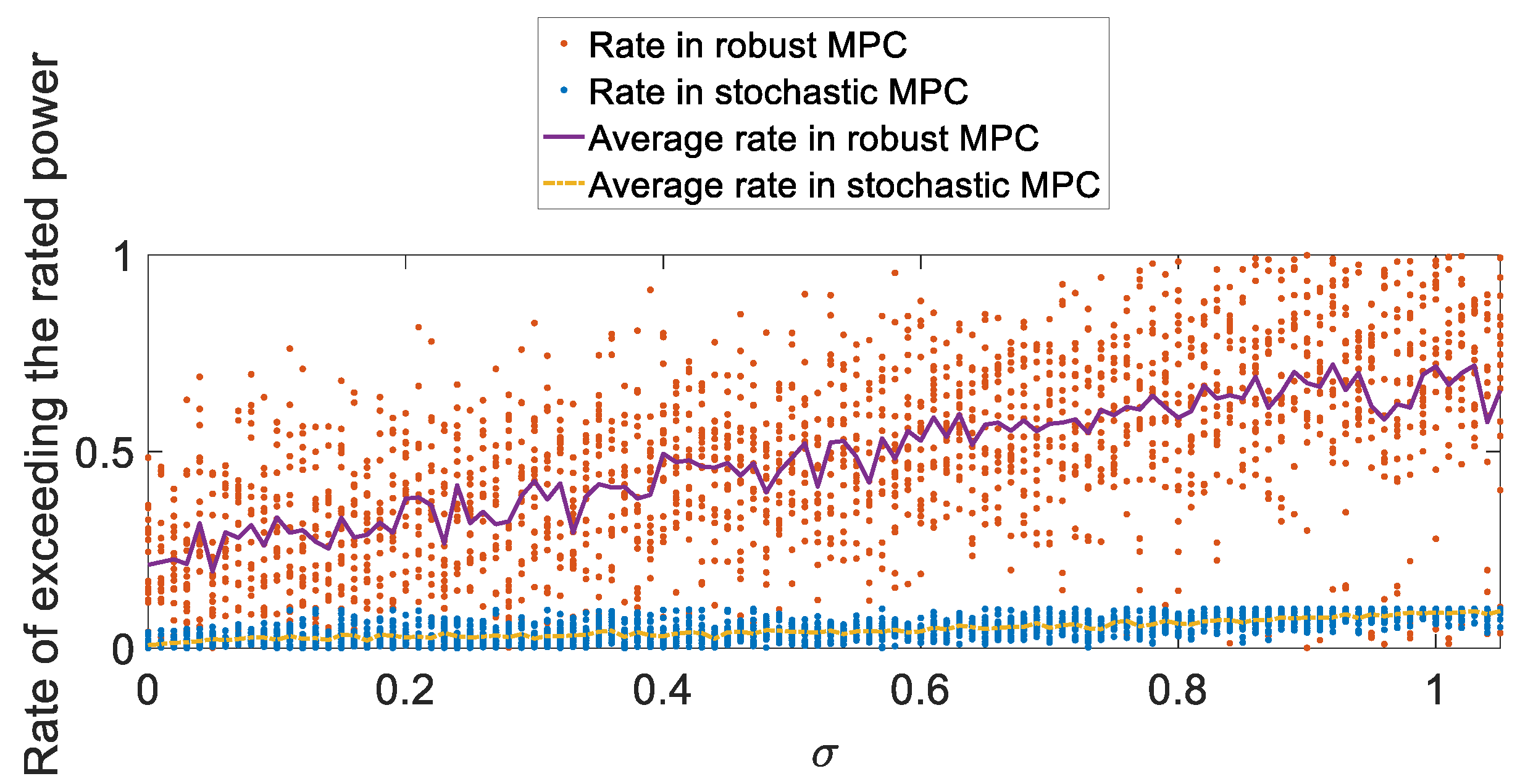
4. Simulation Results
4.1. Simulation Settings
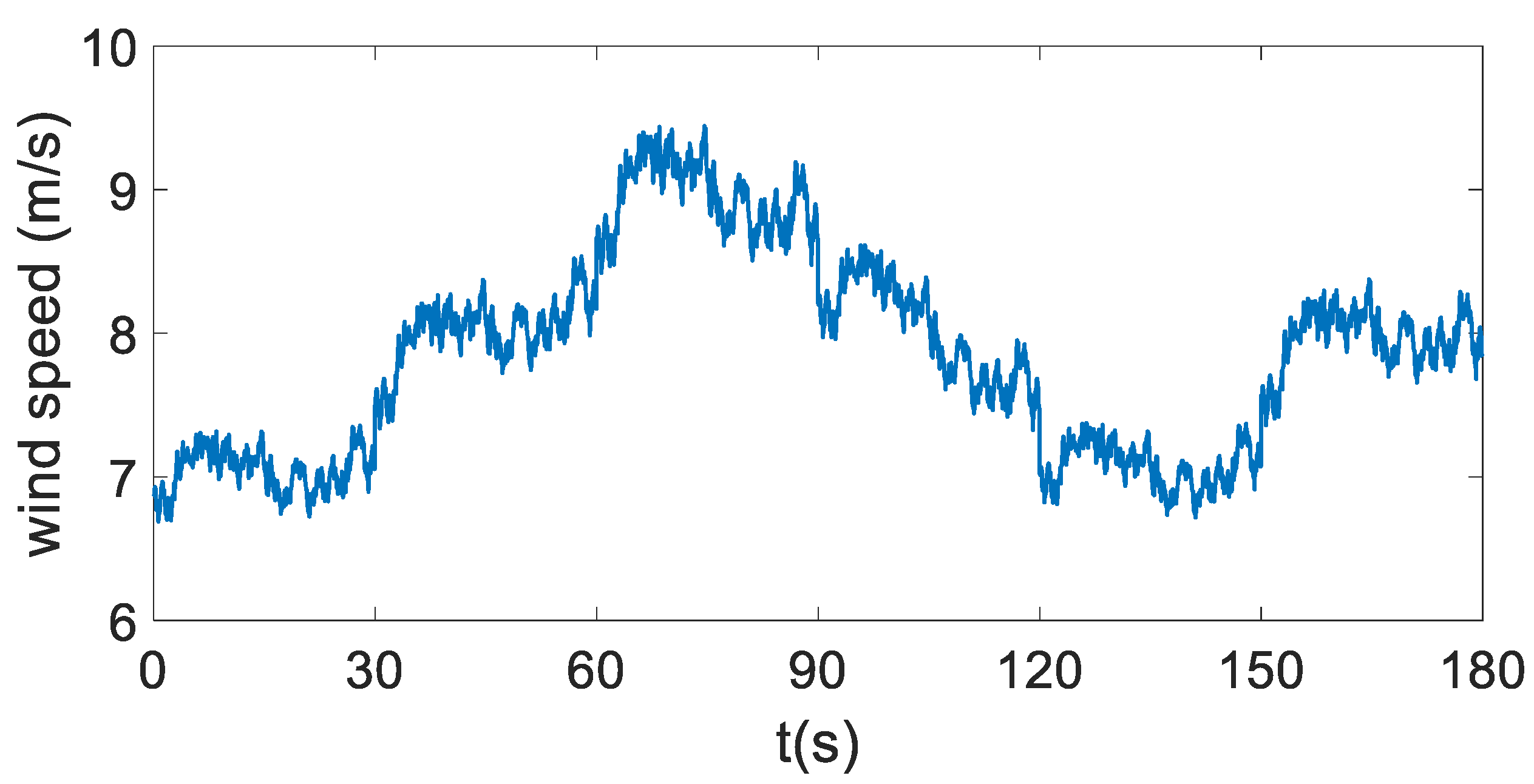
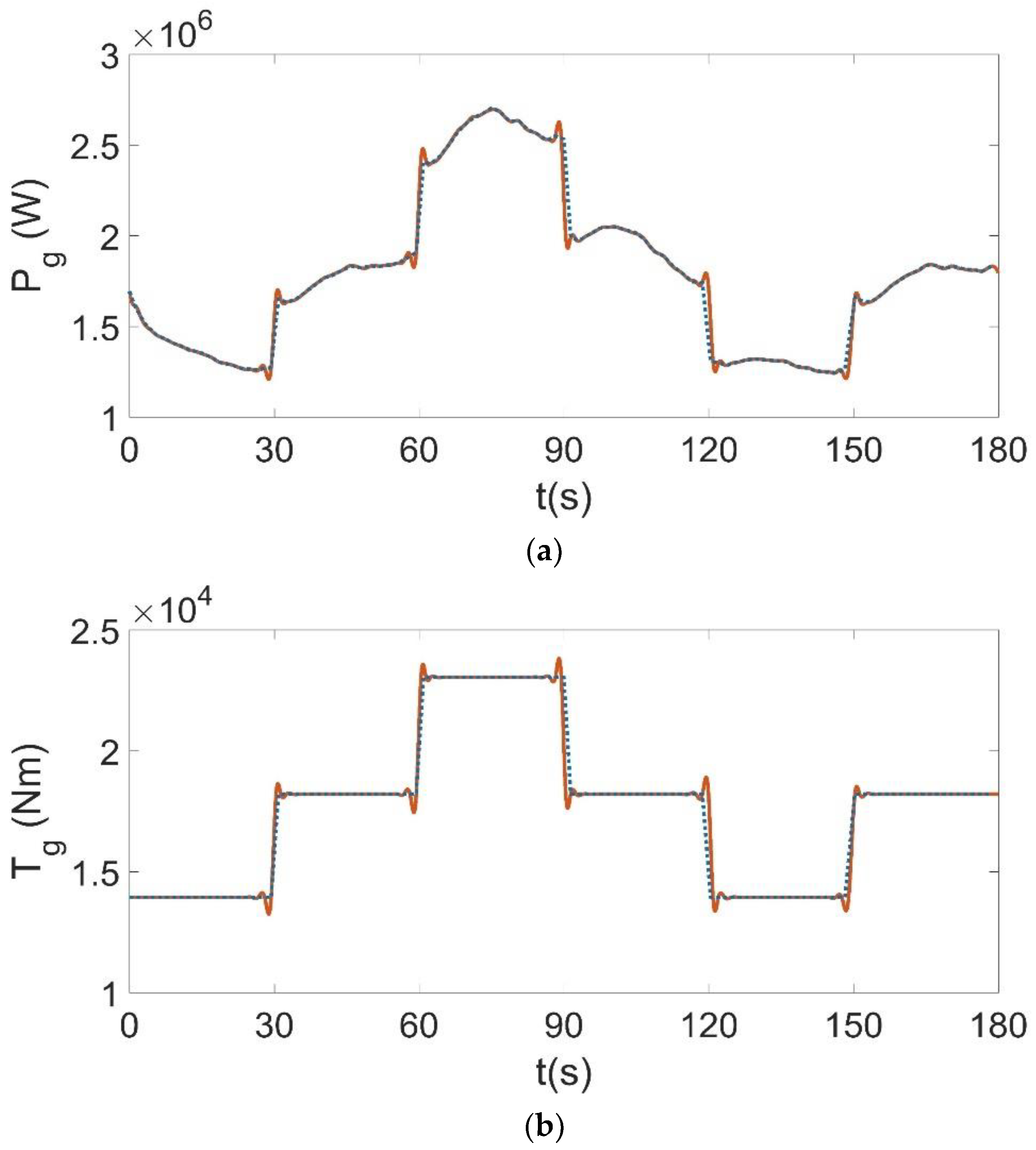
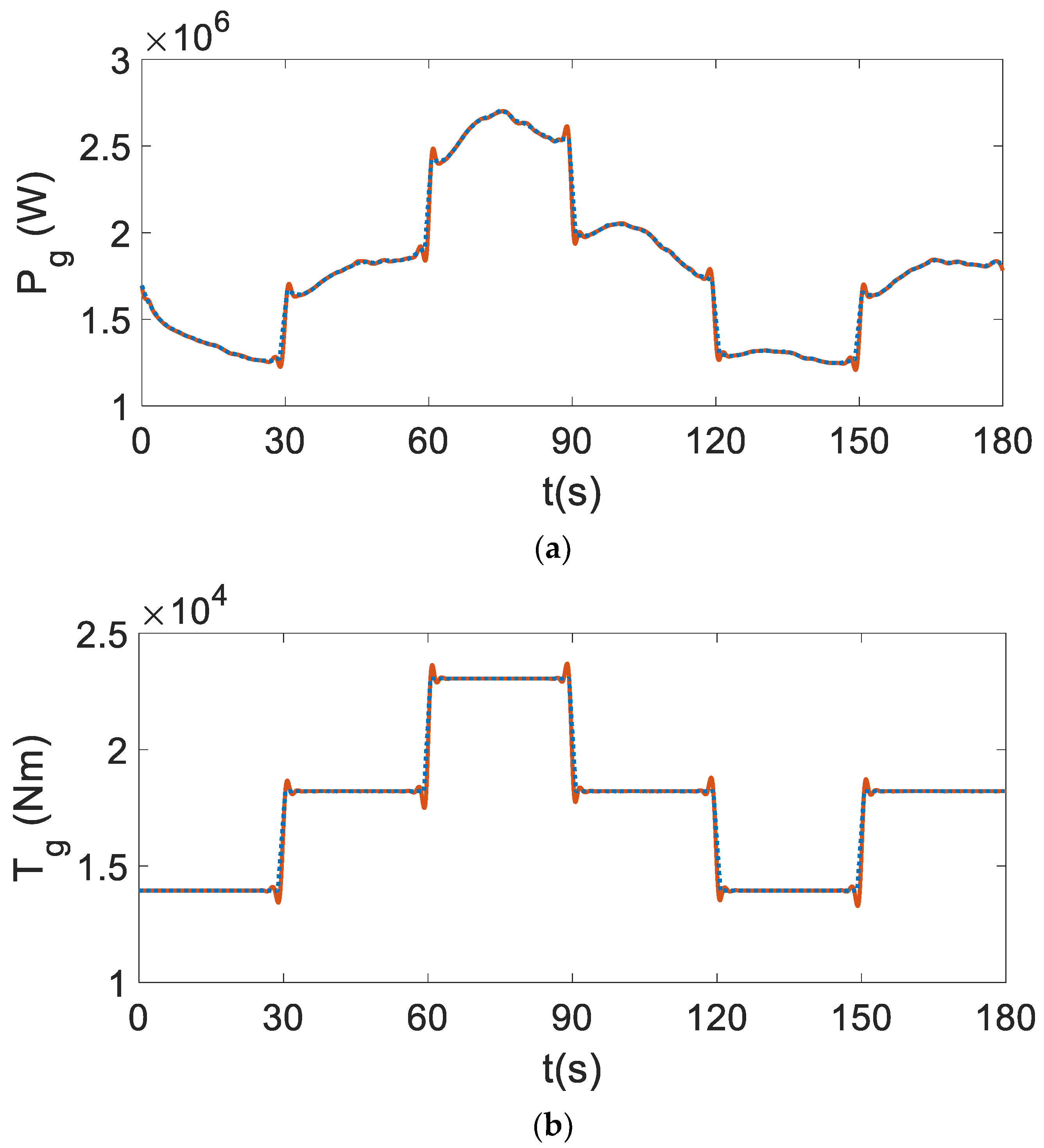
4.2. Low Wind Speed Region
4.2.1. Slight Turbulence Condition
4.2.2. Severe Turbulence Wind Speed Condition
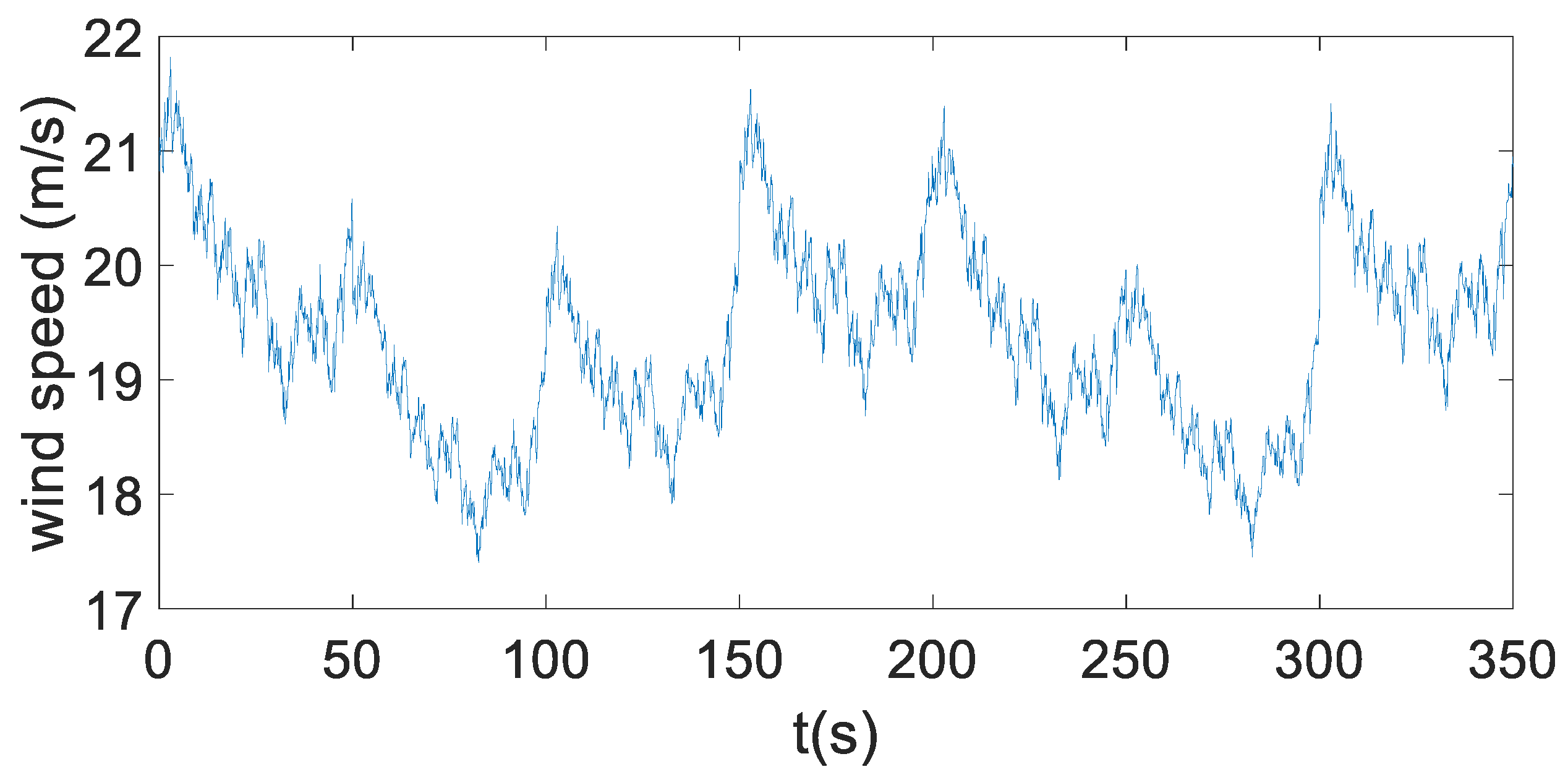
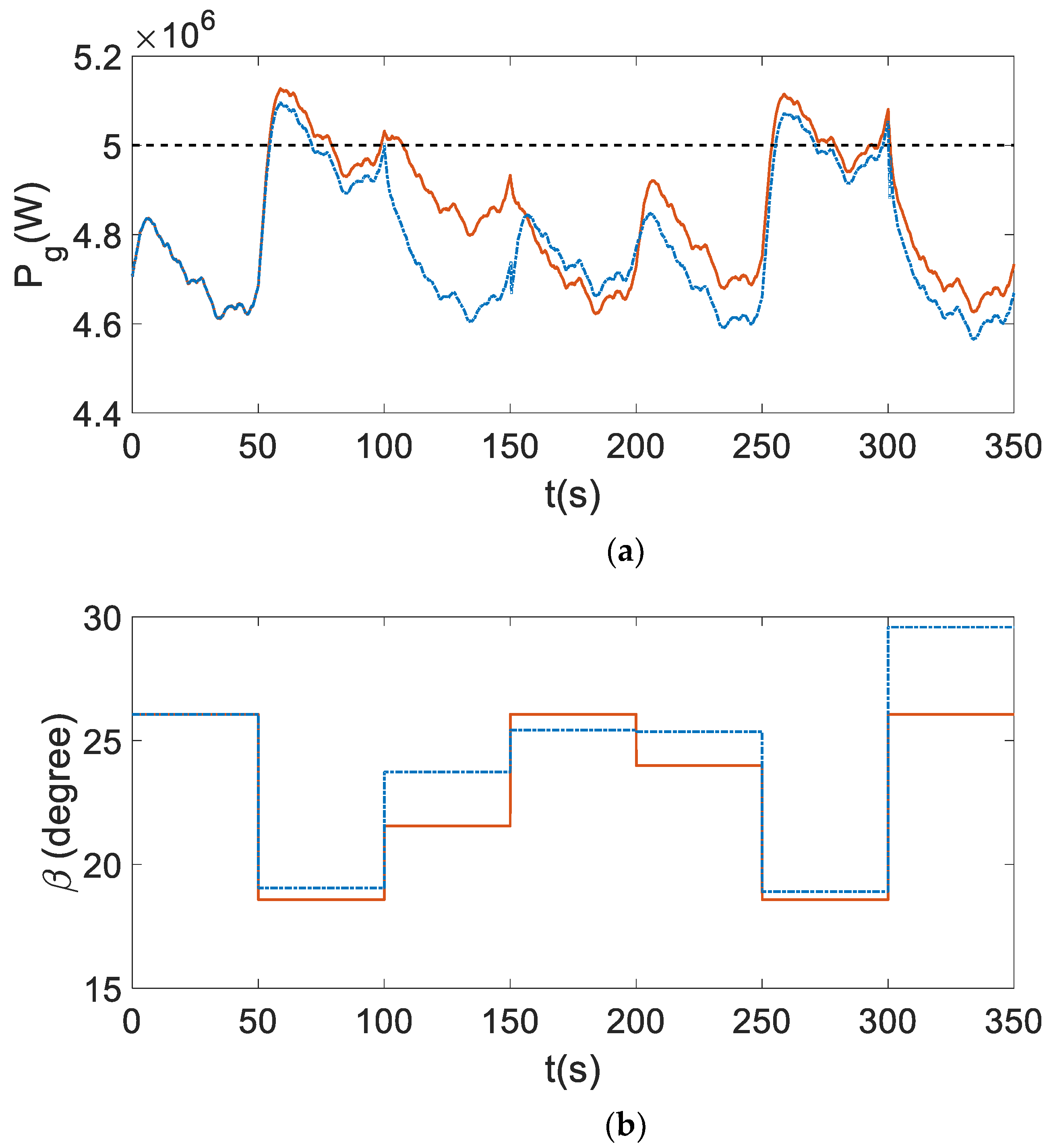
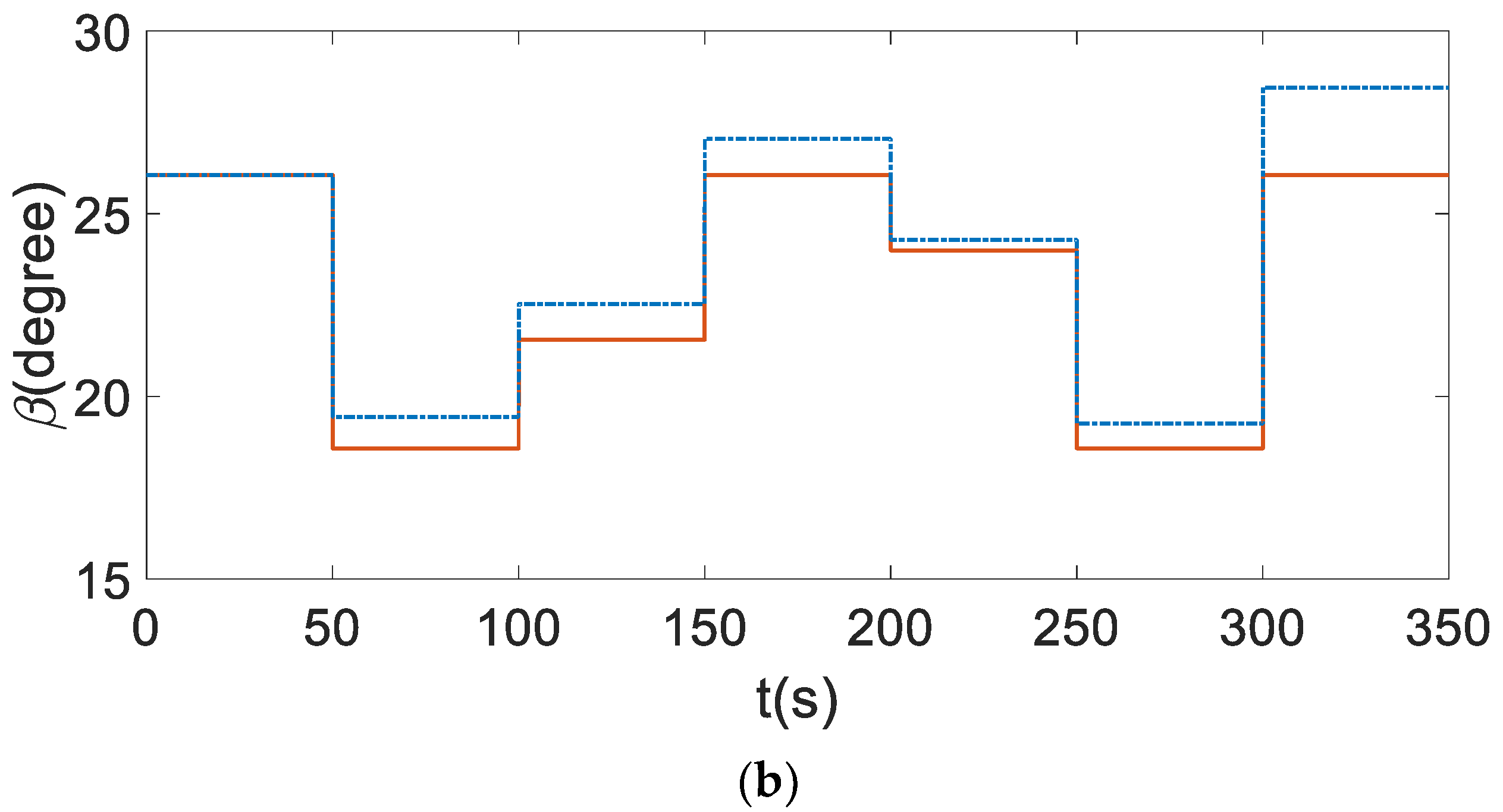
4.3. High Wind Speed Region
4.3.1. Slight Turbulence Condition
4.3.2. Severe Turbulence Wind Speed Condition
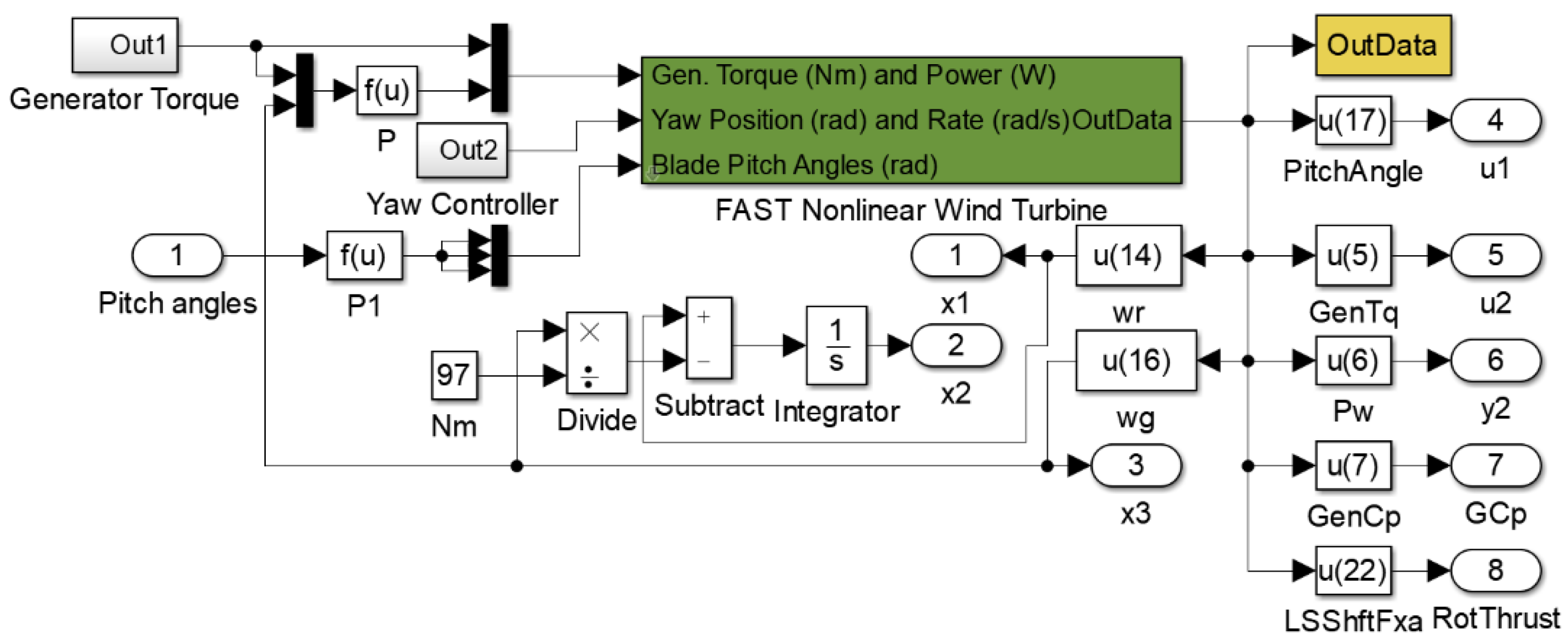
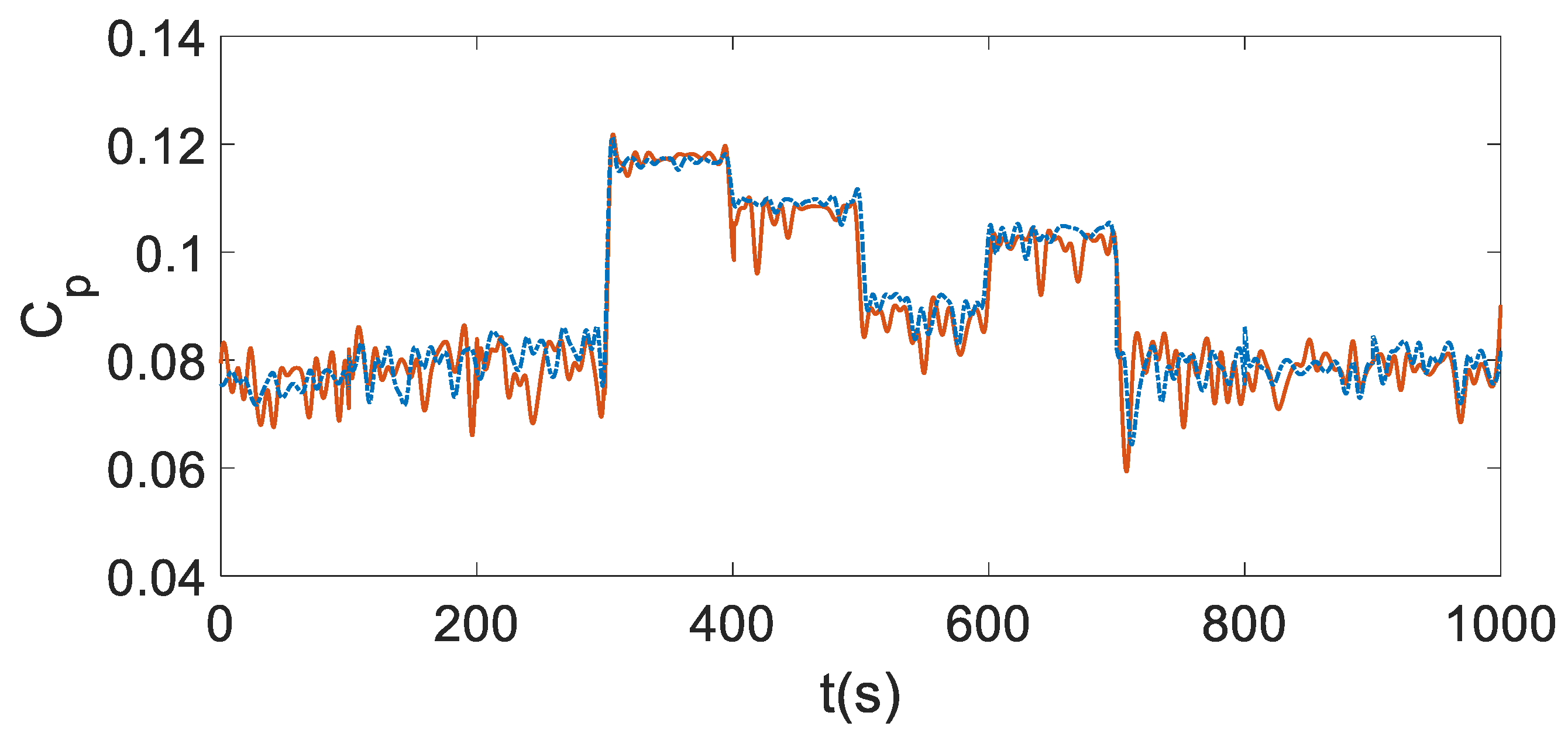
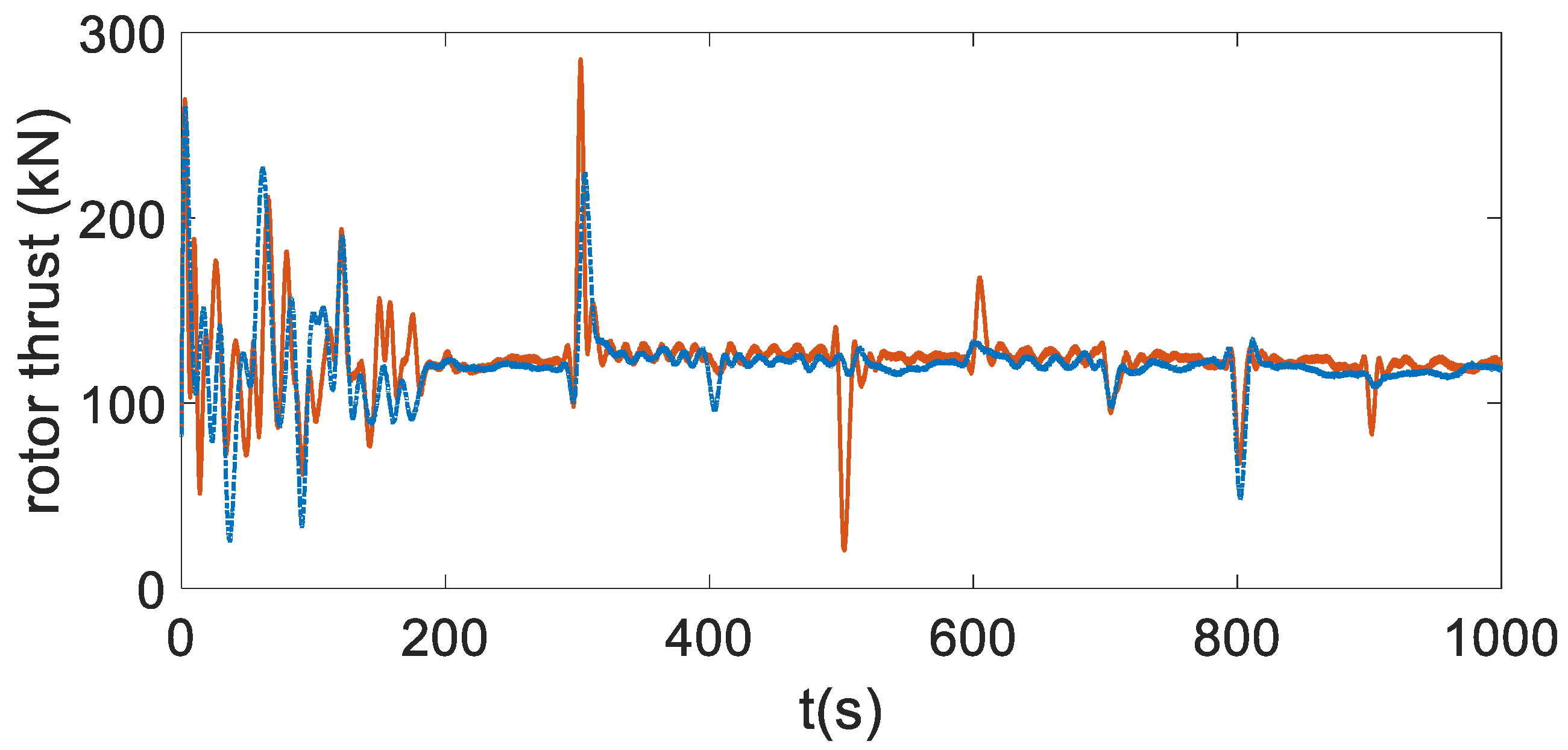
4.4. Validation Using FAST Simulator
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Burton, T.; Sharpe, D.; Jenkins, N.; Bossanyi, E. Wind Energy Handbook; John Wiley & Sons Ltd: Chichester, UK, 2001; pp. 293–297. [Google Scholar]
- International Energy Agency, Renewables 2021 Analysis and Forecasts to 2026. 2021. Available online: https://iea.blob.core.windows.net/assets/5ae32253-7409-4f9a-a91d-1493ffb9777a/Renewables2021-Analysisandforecastto2026.pdf (accessed on 30 April 2022).
- Ren, Y.; Li, L.; Brindley, J.; Jiang, L. Nonlinear PI control for variable pitch wind turbine. Control Eng. Pract. 2016, 50, 84–94. [Google Scholar] [CrossRef] [Green Version]
- Calabrese, D.; Tricarico, G.; Brescia, E.; Cascella, G.L.; Monopoli, V.G.; Cupertino, F. Variable structure control of a small ducted wind turbine in the whole wind speed range using a Luenberger observer. Energies 2020, 13, 4647. [Google Scholar] [CrossRef]
- Moradi, H.; Vossoughi, G. Robust control of the variable speed wind turbines in the presence of uncertainties: A comparison between H∞ and PID controllers. Energy 2015, 90, 1508–1521. [Google Scholar] [CrossRef]
- Wei, C.; Zhang, Z.; Qiao, W.; Qu, L. An adaptive network based reinforcement learning method for MPPT control of PMSG wind energy conversion systems. IEEE Trans. Power Electron. 2016, 31, 7837–7848. [Google Scholar] [CrossRef]
- Saenz-Aguirre, A.; Zulueta, E.; Fernandez-Gamiz, U.; Lozano, J.; Lopez-Guede, J.M. Artificial neural network based reinforcement learning for wind turbine yaw control. Energies 2019, 12, 436. [Google Scholar] [CrossRef] [Green Version]
- Sun, B.H.; Tang, Y.; Ye, L.; Chen, C.Y.; Zhang, C.H.; Zhong, W.Z. A frequency control strategy considering large scale wind power cluster integration based on distributed model predictive control. Energies 2018, 11, 1600. [Google Scholar] [CrossRef] [Green Version]
- Kong, X.B.; Ma, L.L.; Liu, X.J.; Abdelbaky, M.A.; Wu, Q. Wind turbine control using nonlinear economic model predictive control over all operating regions. Energies 2020, 13, 184. [Google Scholar] [CrossRef] [Green Version]
- Soliman, M.; Malik, O.P.; Westwick, D.T. Multiple model multiple-input multiple-output predictive control for variable speed variable pitch wind energy conversion systems. IET Renew. Power Gen. 2011, 5, 124–136. [Google Scholar] [CrossRef]
- Abdelbaky, M.A.; Liu, X.J.; Jiang, D. Design and implementation of partial offline fuzzy model-predictive pitch controller for large-scale wind-turbines. Renew. Energy 2020, 45, 981–996. [Google Scholar] [CrossRef]
- Koerber, A.; King, R. Combined feedback–feedforward control of wind turbines using state-constrained model predictive control. IEEE Trans. Control Syst. Technol. 2013, 21, 1117–1128. [Google Scholar] [CrossRef]
- Kim, D.Y.; Kim, Y.H.; Kim, B.S. Changes in wind turbine power characteristics and annual energy production due to atmospheric stability, turbulence intensity, and wind shear. Energy 2021, 214, 119051. [Google Scholar] [CrossRef]
- Ouari, K.; Rekioua, T.; Ouhrouche, M. Real time simulation of nonlinear generalized predictive control for wind energy conversion system with nonlinear observer. ISA Trans. 2014, 53, 76–84. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Wu, Q.; Guo, Q.; Sun, H.; Xue, Y. Distributed model predictive control of a wind farm for optimal active power control part I: Clustering-based wind turbine model linearization. IEEE Trans. Sustain. Energy 2015, 6, 831–839. [Google Scholar] [CrossRef] [Green Version]
- Kothare, M.V.; Balakrishnan, V.; Morari, M. Robust constrained model predictive control using linear matrix inequalities. Automatica 1996, 32, 1361–1379. [Google Scholar] [CrossRef] [Green Version]
- Mayne, D.Q.; Raković, S.V.; Findeisen, R.; Allgower, F. Robust output feedback model predictive control of constrained linear systems. Automatica 2006, 42, 1217–1222. [Google Scholar] [CrossRef]
- Lasheen, A.; Saad, M.S.; Emara, H.M.; Elshafei, A.L. Robust model predictive control for collective pitch in wind energy conversion systems. IFAC PapersOnLine 2017, 50, 8746–8751. [Google Scholar] [CrossRef]
- Falugi, P.; Mayne, D.Q. Getting robustness against unstructured uncertainty: A tube-based MPC approach. IEEE Trans. Autom. Control 2014, 59, 1290–1295. [Google Scholar] [CrossRef]
- Lasheen, A.; Saad, M.S.; Emara, H.M.; Elshafei, A.L. Continuous-time tube-based explicit model predictive control for collective pitching of wind turbines. Energy 2017, 118, 1222–1233. [Google Scholar] [CrossRef]
- Mayne, D. Competing methods for robust and stochastic MPC. IFAC PapersOnLine 2018, 51, 169–174. [Google Scholar] [CrossRef]
- Dai, L.; Xia, Y.Q.; Gao, Y.L.; Cannon, M. Distributed stochastic MPC of linear systems with additive uncertainty and coupled probabilistic constraints. IEEE Trans. Autom. Control 2017, 62, 3474–3481. [Google Scholar] [CrossRef]
- Xie, L.T.; Xie, L.; Su, H.Y. A comparative study on algorithms of robust and stochastic MPC for uncertain systems. Acta Autom. Sin. 2017, 43, 969–992. [Google Scholar]
- Mesbah, A. Stochastic model predictive control: An overview and perspectives for future research. IEEE Contr. Syst. Mag. 2016, 36, 30–44. [Google Scholar]
- Huang, C.; Li, F.; Jin, Z. Maximum power point tracking strategy for large-scale wind generation systems considering wind turbine dynamics. IEEE Trans. Ind. Electron. 2015, 62, 2530–2539. [Google Scholar] [CrossRef]
- Usta, I.; Arik, I.; Yenilmez, I.; Kantar, Y.M. A new estimation approach based on moments for estimating weibull parameters in wind power applications. Energy Convers. Manag. 2018, 164, 570–578. [Google Scholar] [CrossRef]
- Gros, S.; Schild, A. Real-time economic nonlinear model predictive control for wind turbine control. Int. J. Control 2017, 90, 2799–2812. [Google Scholar] [CrossRef]
- Barradas Berglind, J.D.J.; Wisniewski, R.; Soltani, M. Fatigue damage estimation and data-based control for wind turbines. IET Control Theory Appl. 2015, 9, 1042–1050. [Google Scholar] [CrossRef] [Green Version]
- Soliman, M.; Malik, O.P.; Westwick, D.T. Multiple model predictive control for wind turbines with doubly fed induction generators. IEEE Trans. Sustain. Energy 2011, 2, 215–225. [Google Scholar] [CrossRef]
- Cui, J.; Liu, S.; Liu, J.; Liu, X. A comparative study of MPC and economic MPC of wind energy conversion systems. Energies 2018, 11, 3127. [Google Scholar] [CrossRef] [Green Version]
- Lackner, M.A. An investigation of variable power collective pitch control for load mitigation of floating offshore wind turbines. Wind Energ. 2013, 16, 519–528. [Google Scholar] [CrossRef]
- Yin, X.; Zhao, X. Deep neural learning based distributed predictive control for offshore wind farm using high-fidelity LES data. IEEE Trans. Ind. Electron. 2012, 68, 3251–3261. [Google Scholar] [CrossRef]
- Chen, H.; Allgöwer, F. A Quasi-infinite horizon nonlinear model predictive control scheme with guaranteed stability. Automatica 1998, 34, 1205–1217. [Google Scholar] [CrossRef]
- Cannon, M.; Kouvaritakis, B.; Wu, X. Model predictive control for systems with stochastic multiplicative uncertainty and probabilistic constraints. Automatica 2009, 45, 167–172. [Google Scholar] [CrossRef]
- Cannon, M.; Kouvaritakis, B.; Wu, X. Probabilistic constrained MPC for multiplicative and additive stochastic uncertainty. IEEE Trans. Autom. Control 2009, 54, 1626–1632. [Google Scholar] [CrossRef]
- Jonkman, B.J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Corradini, M.L.; Ippoliti, G.; Orlando, G. An observer-based blade-pitch controller of wind turbines in high wind speeds. Control Eng. Pract. 2017, 58, 186–192. [Google Scholar] [CrossRef]
- Corradini, M.L.; Ippoliti, G.; Orlando, G. Observer based blade-pitch control of wind turbines operating above rated: A preliminary study. IFAC-PapersOnLine 2017, 50, 9914–9919. [Google Scholar] [CrossRef]
- Inthamoussou, F.A.; De Battista, H.; Mantz, R.J. LPV-based active power control of wind turbines covering the complete wind speed range. Renew. Energy 2016, 99, 996–1007. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Definitions | Parameters | Definitions |
|---|---|---|---|
| mean wind speed | collective blade pitch angle | ||
| turbulent speed | tip speed ratio | ||
| scale parameter | cut-in wind speed (m/s) | ||
| shape parameter | (i = 2,3) | boundary wind speed (m/s) | |
| standard deviation | rated wind speed (m/s) | ||
| (i = 0,1,2) | boundary parameter | maximum aerodynamic efficiency | |
| wind speed disturbance | generator rated torque | ||
| cut-off wind speed | rated output power | ||
| rotor speed | looseness parameter | ||
| generator speed | minimum pitch angle | ||
| shaft torsion | maximum pitch angle | ||
| electrical power output | minimum pitch angle rate | ||
| generator efficiency | maximum pitch angle rate | ||
| rotor inertia | minimum generator torque rate | ||
| stiffness coefficient | maximum generator torque rate | ||
| damping coefficient | (i = 1,2,3) | objective function weights | |
| generator inertia | optimal reference value | ||
| generator torque | rated rotor speed | ||
| gear ratio | rated shaft torsion | ||
| rotor radius | rated generator speed | ||
| air density | optimal tip speed ratio | ||
| measurement interval | confidence level | ||
| aerodynamic efficiency |
| Nomenclature | Symbol | Value |
|---|---|---|
| generator efficiency | 98.87% | |
| rated wind speed | 11.2 m/s | |
| cut-off wind speed | 25 m/s | |
| generator rated torque | 43,093.55 Nm | |
| rotor rated angular velocity | 1.2671 rad/s | |
| rated shaft torsion | 0 rad | |
| generator rated angular velocity | 122.9096 rad/s | |
| gear ratio | 97 | |
| rotor inertia | 107 kg/m2 | |
| stiffness coefficient | 108 Nm/rad | |
| damping coefficient | 106 Nm/rad/s | |
| generator inertia | 534.11 kg/m2 | |
| air density | 1.225 kg/m3 | |
| rotor radius | 63 m | |
| minimum pitch angle | 0 degree | |
| maximum pitch angle | 90 degree | |
| minimum pitch angle rate | −8 degree/s | |
| maximum pitch angle rate | 8 degree/s | |
| minimum generator torque rate | −15,000 Nm/s | |
| maximum generator torque rate | 15,000 Nm/s | |
| rated output power | 106 W | |
| confidence level | 0.9 |
| Index | Robust MPC | Stochastic MPC |
|---|---|---|
| Rate of exceeding the rated power | 0.1523 | 0.0918 |
| Average value of trajectory (MW) | 4.8346 × 106 | 4.7806 × 106 |
| Average value of trajectory (deg/s) | 1.4505 × 10−8 | 1.9447 × 10−8 |
| Average value of trajectory (deg/s) | 0.0250 | 0.0328 |
| Average value of optimal index (21) | 0.2992 | 0.2234 |
| Index | Robust MPC | Stochastic MPC |
|---|---|---|
| Rate of exceeding the rated power | 0.1824 | 0.0979 |
| Average value of trajectory (MW) | 4.8697 × 106 | 4.8172 × 106 |
| Average value of trajectory (deg/s) | 2.0043 × 10−8 | 2.0458 × 10−8 |
| Average value of trajectory (deg/s) | 0.0250 | 0.0273 |
| Average value of optimal index (21) | 0.2410 | 0.2078 |
| Index | Robust MPC | Stochastic MPC |
|---|---|---|
| Rate of exceeding the rated power | 0.1246 | 0.0966 |
| Average value of trajectory (MW) | 4.9191 × 106 | 4.9043 × 106 |
| Average value of trajectory (deg/s) | 1.8680 × 10−8 | 1.8353 × 10−8 |
| Average value of trajectory (deg/s) | 0.0025 | 0.0029 |
| Average value of optimal index (21) | 0.0340 | 0.0283 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Feng, L.; Kong, X. A Comparative Study of Robust MPC and Stochastic MPC of Wind Power Generation System. Energies 2022, 15, 4814. https://doi.org/10.3390/en15134814
Liu X, Feng L, Kong X. A Comparative Study of Robust MPC and Stochastic MPC of Wind Power Generation System. Energies. 2022; 15(13):4814. https://doi.org/10.3390/en15134814
Chicago/Turabian StyleLiu, Xiangjie, Le Feng, and Xiaobing Kong. 2022. "A Comparative Study of Robust MPC and Stochastic MPC of Wind Power Generation System" Energies 15, no. 13: 4814. https://doi.org/10.3390/en15134814