
Timetable Optimization and Trial Test for Regenerative Braking Energy Utilization in Rapid Transit Systems

 , ,
, ,  and
and
Abstract
:
1. Introduction
2. Train Motion Kinematics
3. Methodology
3.1. Timetable Optimization
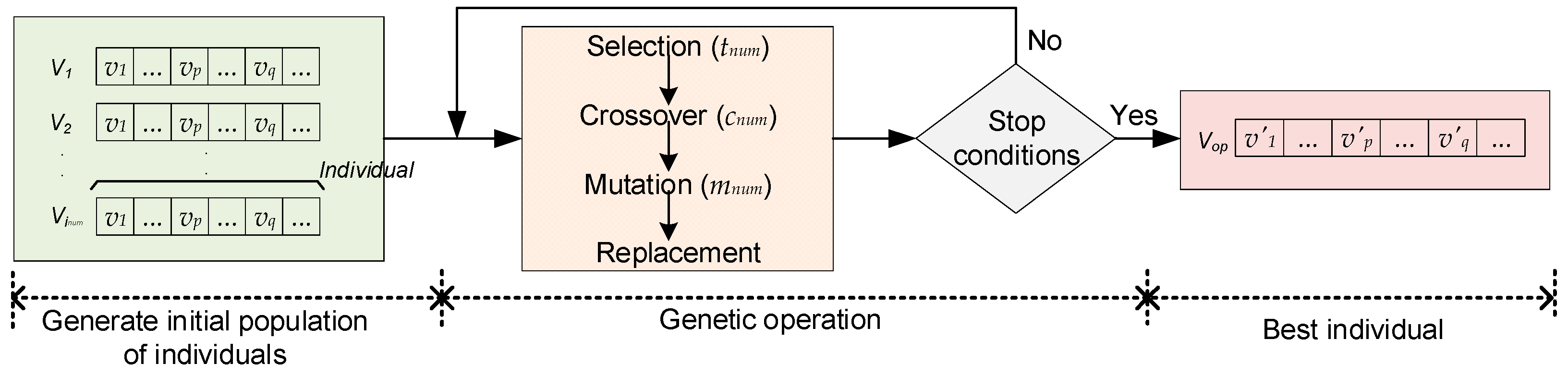
3.2. Optimization Algorithm Development
- (1)
- When i = 1, the algorithm generates a vector V1 to represent a single solution.
- (2)
- Let i = i + 1; the algorithm generates another vector Vi.
- (3)
- Repeat (2) until i > inum to form the full generation. The algorithm then moves to Step 2 below.
- (1)
- Each solution will be used to produce a full-day timetable.
- (2)
- The full-day timetable will be imported to a train simulator to calculate the synchronized groups, overlapping time, train regenerative energy and full-day energy usage.
- (3)
- The solution with the smallest energy consumption represents the best individual. Then, it moves to Step 3 below.
- (1)
- When i = 1, the algorithm produces a vector V′ = EVALUATION(Vi).
- (2)
- Let i = i + 1; the algorithm repeats the above process and generates until i > tnum. The program then moves to the crossover operation.
- (3)
- When j = 1, the algorithm chooses one element from two individuals and exchanges the elements with each other randomly. Assuming the individuals and , the elements p and q are chosen. After the crossover operation, the new individuals will look as and .
- (4)
- Let j = j + 2; the algorithm repeats the process above until j > cnum. The program then moves to the mutation operation.
- (5)
- When k = 1, the algorithm chooses one element from an individual and replaces it with a random value, which meets all the constraints in Equations (2) and (3). For instance, assuming the individual Vγ = (v1, … vs, …), the element s is selected. After the mutation operation, the new individual will look as .
- (6)
- Let k = k + 1; the genetic algorithm repeats the process above until k > mnum.
- (1)
- When l = 1, the existing Vl is replaced by , which is produced randomly by the algorithm and meets all constraints in Equations (2) and (3).
- (2)
- Let l = l + 1; the algorithm repeats the process above until l > rnum.
4. Metro Line Trial Test
4.1. Trial Test Introduction
- (1)
- The optimal timetable was submitted to the operation department of the metro operator for approval, along with a trial test plan, which shows the test process, and the potential impact on the network operation.
- (2)
- Before the trial test, the staff from the operation department shall import the optimal timetable into the traffic management system (TMS). All the trains (with automatic train operation systems or human drivers) in the network shall operate following the new arrangement.
- (3)
- The whole-day train energy usage results from the trial test shall be compared with the data on a different day using the scheduled timetable (but the day of the week remains the same, e.g., Wednesday vs. Wednesday). To reduce any uncertainty, the test was arranged on a workday, rather than at weekends. This is because the passenger flow at the weekends may change significantly due to events or weather.
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kleftakis, V.A.; Hatziargyriou, N.D. Optimal control of reversible substations and wayside storage devices for voltage stabilization and energy savings in metro railway networks. IEEE Trans. Transp. Electrif. 2019, 5, 515–523. [Google Scholar] [CrossRef]
- Hurt, G. FOI Request Detail, Energy Use. 2018. Available online: https://tfl.gov.uk/corporate/transparency/freedom-of-information/foi-request-detail?referenceId=FOI-1482-1819 (accessed on 1 May 2022).
- Zhi, L. A Common Model for Railway Train Timetable Optimization. In Proceedings of the 2019 11th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Qiqihar, China, 28–29 April 2019. [Google Scholar]
- Parbo, J.; Nielsen, O.A.; Prato, C.G. User perspectives in public transport timetable optimisation. Transp. Res. Part C Emerg. Technol. 2014, 48, 269–284. [Google Scholar] [CrossRef] [Green Version]
- Shuai, S.; Tao, T.; Xiang, L.; Ziyou, G. Optimization of multitrain operations in a subway system. Intell. Transp. Syst. IEEE Trans. 2014, 15, 673–684. [Google Scholar] [CrossRef]
- Xin, Y.; Xiang, L.; Ziyou, G.; Hongwei, W.; Tao, T. A Cooperative Scheduling Model for Timetable Optimization in Subway Systems. Intell. Transp. Syst. IEEE Trans. 2013, 14, 438–447. [Google Scholar]
- Watanabe, S.; Sato, Y.; Koseki, T.; Isobe, E.; Kawashita, J. Verification Test of Energy-Efficient Operations and Scheduling Utilizing Automatic Train Operation System. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia), Niigata, Japan, 20–24 May 2018. [Google Scholar]
- Montrone, T.; Pellegrini, P.; Nobili, P.; Longo, G. Energy consumption minimization in railway planning. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016. [Google Scholar]
- López-López, Á.J.; Pecharromán, R.R.; Fernández-Cardador, A.; Cucala, A.P. Assessment of energy-saving techniques in direct-current-electrified mass transit systems. Transp. Res. Part C Emerg. Technol. 2014, 38, 85–100. [Google Scholar] [CrossRef]
- Ning, L.; Li, Y.; Zhou, M.; Song, H.; Dong, H. A Deep Reinforcement Learning Approach to High-speed Train Timetable Rescheduling under Disturbances. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019. [Google Scholar]
- Hsi, P.-H.; Chen, S.-L. Electric load estimation techniques for high-speed railway (HSR) traction power systems. IEEE Trans. Veh. Technol. 2001, 50, 1260–1266. [Google Scholar] [CrossRef]
- Loumiet, J.R.; Jungbauer, W.G. Train Accident Reconstruction and FELA and Railroad Litigation, 4th ed.; Lawyers & Judges Pub Co.: Tucson, AZ, USA, 2005; p. 767. [Google Scholar]
- Hill, R. Electric railway traction. Part 1: Electric traction and DC traction motor drives. Power Eng. 1994, 8, 47–56. [Google Scholar] [CrossRef]
- Cox, E. Fuzzy Modelling and Genetic Algorithms for Data Mining and Exploration, 1st ed.; Morgan Kaufmann: Burlington, MA, USA, 2005. [Google Scholar]
- Rexhepi, A.; Maxhuni, A.; Dika, A. Analysis of the impact of parameters values on the Genetic Algorithm for TSP. Int. J. Comput. Sci. Issues 2013, 10, 158. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
| Movement Mode | Equations |
|---|---|
| Motoring | |
| Cruising | |
| Coasting | |
| Braking |
| Down Direction | Up Direction | |||
|---|---|---|---|---|
| Dwelling Time, Seconds | Inter-Station Journey Time, Seconds | Station Number | Inter-Station Journey Time, Seconds | Dwelling Time, Seconds |
| Turnover at the terminal station: 145 s | ||||
| 90 | 225 | 1 | 0 | 50 |
| 35 | 154 | 2 | 295 | 35 |
| 40 | 162 | 3 | 155 | 40 |
| 35 | 139 | 4 | 182 | 35 |
| 45 | 120 | 5 | 142 | 45 |
| 35 | 143 | 6 | 120 | 35 |
| 35 | 133 | 7 | 144 | 35 |
| 35 | 90 | 8 | 130 | 35 |
| 50 | 0 | 9 | 90 | 90 |
| Turnover at the terminal station: 135 s | ||||
| Service Pattern for the Whole Day | Number of Services | Service Interval (mm:ss) | |
|---|---|---|---|
| Scheduled Timetable | Optimal Timetable | ||
| Peak-shift time | 6 | 05:54 to 09:35 | 05:54 to 09:35 |
| Morning peak-time | 20 | 05:16 | 05:22 (+6 s) |
| Peak-shift time | 1 | 06:40 | 06:40 |
| Morning off-peak time | 58 | 08:20 | 08:17 (−3 s) |
| Peak-shift time | 1 | 05:40 | 05:40 |
| Evening peak-time | 25 | 05:16 | 05:22 (+6 s) |
| Peak-shift time | 1 | 05:20 | 05:20 |
| Evening off-peak time | 28 | 08:20 | 08:17 (−3 s) |
| Peak-shift time | 2 | 09:45 to 09:55 | 09:45 to 09:55 |
| Total time: | 144 | 66,228 s | 66,240 s |
| Total braking synchronized time: | 115,232 | 123,373 | |
| Subjects | Value |
|---|---|
| Rolling stock mass (tonne) | 204 |
| Maximum passenger load (tonne) | 127 |
| Power supply | DC 1500 V |
| Maximum tractive power (kW) | 3700 |
| Maximum braking power (kW) | 3900 |
| Rotary allowance | 0.08 |
| Tractive force (kN) | 290 |
| Braking force (kN) | 350 |
| Train formation | EMU 4M2T (4 motor cars, 2 trailer cars) |
| Train length (meter) | 118 |
| Top operational speed (km/h) | 80 |
| TCMS Output Data | Normal Operation Day (with Scheduled Timetable) | Trail Test Day (with Optimal Timetable) |
|---|---|---|
| Operation time | 18.4 h | 18.4 h |
| Total energy usage | 51,767 kWh | 50,649 kWh (−2.2%) |
| Train tractive energy usage | 64,187 kWh | 64,030 kWh (−0.2%) |
| Auxiliary energy usage | 11,428 kWh | 11,442 kWh (+0.1%) |
| Train regenerative braking energy usage | 23,848 kWh | 24,823 kWh (+4.1%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, N.; Tian, Z.; Hillmansen, S.; Chen, L.; Roberts, C.; Gao, S. Timetable Optimization and Trial Test for Regenerative Braking Energy Utilization in Rapid Transit Systems. Energies 2022, 15, 4879. https://doi.org/10.3390/en15134879
Zhao N, Tian Z, Hillmansen S, Chen L, Roberts C, Gao S. Timetable Optimization and Trial Test for Regenerative Braking Energy Utilization in Rapid Transit Systems. Energies. 2022; 15(13):4879. https://doi.org/10.3390/en15134879
Chicago/Turabian StyleZhao, Ning, Zhongbei Tian, Stuart Hillmansen, Lei Chen, Clive Roberts, and Shigen Gao. 2022. "Timetable Optimization and Trial Test for Regenerative Braking Energy Utilization in Rapid Transit Systems" Energies 15, no. 13: 4879. https://doi.org/10.3390/en15134879